i
BĠRĠM GÜÇ KATSAYILI VE SIFIR-GERĠLĠM-GEÇĠġLĠ
YENĠ BĠR SARMAġIK YÜKSELTEN DÖNÜġTÜRÜCÜNÜN
TASARIMI VE GERÇEKLENMESĠ
Naci GENÇ
DOKTORA TEZĠ
ELEKTRĠK-ELEKTRONĠK MÜHENDĠSLĠĞĠ
GAZĠ ÜNĠVERSĠTESĠ
FEN BĠLĠMLERĠ ENSTĠTÜSÜ
TEMMUZ 2010
ANKARA
Naci GENÇ tarafından hazırlanan BĠRĠM GÜÇ KATSAYILI VE SIFIR-GERĠLĠMGEÇĠġLĠ
YENĠ
BĠR
SARMAġIK
YÜKSELTEN
DÖNÜġTÜRÜCÜNÜN
TASARIMI VE GERÇEKLENMESĠ adlı bu tezin Doktora tezi olarak uygun
olduğunu onaylarım.
Doç. Dr. Ġres ĠSKENDER
……………………………….
Tez DanıĢmanı, Elektrik-Elektronik Müh. Anabilim Dalı
Bu çalıĢma, jürimiz tarafından oy birliği ile Elektrik-Elektronik Mühendisliği
Anabilim Dalında Doktora tezi olarak kabul edilmiĢtir.
Prof. Dr. Muammer ERMĠġ
.................................................
(Elektrik-Elektronik Müh., ODTÜ)
Doç. Dr. Ġres ĠSKENDER
.................................................
(Elektrik-Elektronik Müh., Gazi Ünv.)
Prof. Dr. M. Sezai DĠNÇER
.................................................
(Elektrik-Elektronik Müh., Gazi Ünv.)
Prof. Dr. Ömer Faruk BAY
.................................................
(Elktronik-Bilgisayar Eğt., Gazi Ünv.)
Doç. Dr. M. Timur AYDEMĠR
.................................................
(Elektrik-Elektronik Müh., Gazi Ünv.)
Tarih: 21/07/2010
Bu tez ile G.Ü. Fen Bilimleri Enstitüsü Yönetim Kurulu Doktora derecesini
onamıĢtır.
Prof. Dr. Bilal TOKLU
Fen Bilimleri Enstitüsü Müdürü
……………………………….
TEZ BĠLDĠRĠMĠ
Tez içindeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde
edilerek sunulduğunu, ayrıca tez yazım kurallarına uygun olarak hazırlanan bu
çalıĢmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf
yapıldığını bildiririm.
Naci GENÇ
iv
BĠRĠM GÜÇ KATSAYILI VE SIFIR-GERĠLĠM-GEÇĠġLĠ
YENĠ BĠR SARMAġIK YÜKSELTEN DÖNÜġTÜRÜCÜNÜN
TASARIMI VE GERÇEKLENMESĠ
(Doktora Tezi)
Naci GENÇ
GAZĠ ÜNĠVERSĠTESĠ
FEN BĠLĠMLERĠ ENSTĠTÜSÜ
Temmuz 2010
ÖZET
EN-61000-3-2 gibi uluslararası kuruluĢlar tarafından getirtilen standartları
karĢılamak için bir çok güç katsayısı düzeltme (GKD) devresi geliĢtirilmiĢtir.
GKD yöntemi doğrusal olmayan yükler tarafından üretilen Ģebeke akım
harmoniklerini düzenler. Sürekli iletim modlu (SĠM) yükselten tip devre basit
yapıya, yüksek güç yoğunluğuna, hızlı geçici tepkiye ve sürekli akım moduna
sahip olduğu için bir çok alternatif devre içerisinde GKD ön düzenleyici olarak
tercih edilir. Orta ve yüksek güç uygulamalarında çıkıĢ gücünü arttırmak ve
giriĢ akım dalgacık oranını düĢürmek için sarmaĢık (faz farklı paralel)
yükselten GKD devreleri önerilmektedir.
Küçük boyutlu GKD dönüĢtürücü elde etmek için anahtarlama frekansı
yükseltilir. Fakat, yüksek anahtarlama frekansı sert anahtarlamalı devrelerde,
anahtarlama kayıplarının artmasına ve yüksek boyutlu elektromanyetik giriĢim
(EMI)
süzgeç
gereksinimine
neden
olur.
Yükselten
dönüĢtürücülerin
anahtarlama kayıplarını azaltmak için kullanılan pasif yardımcı devrelerin en
temel problemi, güç anahtarları üzerinde yüksek gerilim streslerine yol açması
ve dönüĢtürücünün boyutunu ciddi oranda arttırmasıdır.
Pasif yardımcı
devrelerin dezavantajlarını içermeyen, yükselten ve sarmaĢık yükselten
v
devrelerin anahtarlama kayıplarını azaltmak için aktif yardımcı devreler de
geliĢtirilmiĢtir. Sıfır-gerilim-geçiĢli (SGG) aktif yumuĢak anahtarlama yöntemi
gerilim ve akım stresi oluĢturmadan, bir dönüĢtürücünün ana anahtarlarının
açma (ON) sürelerinde mükemmel bir anahtarlama sağlar. Güç MOSFET
anahtarlarının kesim (OFF) süresindeki kayıpları açma (ON) süresindeki kayba
göre çok düĢük olduğundan, SGG aktif yardımcı devrelerin MOSFET içerikli
dönüĢtürücülere uygulanması oldukça uygundur.
Bu çalıĢmada, yumuĢak anahtarlamalı ve birim güç katsayılı, iki güç katı içeren
sarmaĢık yükselten devre geliĢtirilmiĢ ve incelenmiĢtir. DönüĢtürücüde yüksek
maliyete ve karmaĢıklığa yol açmadan geliĢtirilen yardımcı devre sadece bir
aktif anahtar ve az sayıda pasif devre elemanı içermektedir. Bu yardımcı
devrenin en büyük avantajı, devredeki ana anahtarlarda SGG koĢulu
sağlanırken
yardımcı
devredeki
anahtar
ve
diyotlarda
da
yumuĢak
anahtarlama sağlanmaktadır. DönüĢtürücüdeki bütün anahtarlar yumuĢak
anahtarlama ile anahtarlanırken, her hangi bir gerilim ve akım stresi
oluĢmamaktadır. ÇalıĢmada, önerilen devrenin davranıĢını açıklayan geçiĢ
durumları, bir anahtarlama peryodu dahilinde analiz edilmiĢtir. Önerilen
devrenin tasarımı yapıldıktan sonra Simplorer programı kullanılarak benzetim
çalıĢmaları yapılmıĢtır. Daha sonra önerilen devrenin DSP tabanlı ortalama
akım
kontrollü
prototipi
tamamlanarak
deneysel
çalıĢma
sonuçları
kaydedilmiĢtir. Önerilen SGG sarmaĢık yükselten GKD devresinin eĢdeğeri
olan sert anahtarlamalı devrenin de deneysel çalıĢmaları yapılarak verim
karĢılaĢtırması yapılmıĢtır. Sonuçlardan, benzetim çalıĢma sonuçlarının ve
deneysel çalıĢma sonuçlarının uyumlu olduğu ve önerilen yumuĢak anahtarlama
tekniğinin sarmaĢık yükselten GKD devresinin verimini %2 civarında arttırdığı
görülmüĢtür.
Bilim Kodu
: 905.1.033
Anahtar Kelimeler : GKD, sarmaĢık yükselten, SGG, yumuĢak anahtarlama
Sayfa Adedi
: 162
Tez Yöneticisi
: Doç.Dr.Ġres ĠSKENDER
vi
DESIGN AND IMPLEMENTATION OF A NEW
UNITY POWER FACTOR INTERLEAVED BOOST CONVERTER
WITH ZERO-VOLTAGE-TRANSITION
(Ph.D. Thesis)
Naci GENÇ
GAZĠ UNIVERSITY
INSTITUTE OF SCIENCE AND TECHNOLOGY
July 2010
ABSTRACT
Several active power factor correction (PFC) techniques have been
developed to satisfy international standards such as EN-61000-3-2. The PFC
technique reduces current harmonics in utility systems produced by
nonlinear loads. Among the different alternatives, the boost converter
operating in continuous conduction mode (CCM) which has simple topology,
high power density, fast transient response and continuous input current
has been widely adopted as a front-end PFC preregulator. In medium and
high power applications, interleaved boost PFC converters have been
proposed to increase the output power and to reduce the input current
ripple.
The switching frequency is increased to design a PFC converter with lower
volume. However, higher switching frequency causes increase in switching
losses and a serious electromagnetic interference (EMI) problem in hard
switched PWM converters. The main problem of passive auxiliary circuits
which have been proposed to minimize switching losses of the boost
converters is that the voltage stresses on the power switches are too high and
the converter is bulky. Active auxiliary snubbers are also developed to
vii
reduce switching losses of boost and interleaved boost converters without
having the disadvantages of passive auxiliary circuits. The Zero voltage
transition (ZVT) active technique provides basically a perfect turn on
process for the main switches of a converter without voltage and current
stresses. Since the turn off loss of MOSFETs is very low compared to the
turn on loss, using MOSFETs in a converter with ZVT auxiliary circuit is
more suitable.
In this study, an improved soft switched two-cell interleaved boost AC/DC
converter with high power factor is proposed and investigated. The proposed
auxiliary circuit is implemented using only one auxiliary switch and a minimum
number of passive components without an important increase in the cost and
complexity of the converter. The main advantage of this auxiliary circuit is that
it not only provides ZVT for the main switches but also provides soft switching
for the auxiliary switch and diodes. Though all semiconductor devices operate
under soft switching, they do not have any additional voltage and current
stresses. In the study, the transition modes for describing the behavior of the
proposed converter in one switching period are described. After designing the
proposed topology, the simulation studies have been done via Simplorer
software. A prototype of the proposed converter with DSP based average
current control mode controlled has been done and experimental results are
recorded. In addition, the experimental studies of the hard switched interleaved
boost PFC converter have been done and efficiencies of the converters are
compared. From the results, it is seen that the simulation and experimental
results are in good agreement and the proposed soft switching technique
improves the efficiency of the interleaved boost PFC converter around 2%.
Science Code
Key Words
Page Number
Adviser
: 905.1.033
: PFC, interleaved boost, ZVT, soft switching
: 162
: Assoc.Prof.Dr.Ġres ĠSKENDER
viii
TEġEKKÜR
ÇalıĢmalarım boyunca yardım ve katkılarıyla beni yönlendiren danıĢman hocam
Doç.Dr.
Ġres
ĠSKENDER‟e,
görüĢlerinden
faydalandığım
ve
yardımlarını
esirgemeyen Prof.Dr. Ömer Faruk BAY‟a ve Doç.Dr. Timur AYDEMĠR‟e,
hayatımın her safhasında bana destek olan değerli annem Halise GENÇ‟e, doktora
süresince her türlü desteği sağlayarak rahat çalıĢma ortamı sunan sevgili eĢim Pınar
GENÇ‟e teĢekkürü bir borç bilirim. Babam Ali GENÇ‟in hatırasına.
ix
ĠÇĠNDEKĠLER
Sayfa
ÖZET ........................................................................................................................ iv
ABSTRACT .............................................................................................................. vi
TEġEKKÜR ............................................................................................................xiii
ĠÇĠNDEKĠLER ......................................................................................................... ix
ÇĠZELGELERĠN LĠSTESĠ ..................................................................................... xii
ġEKĠLLERĠN LĠSTESĠ ......................................................................................... xiii
RESĠMLERĠN LĠSTESĠ ........................................................................................ xxii
SĠMGELER VE KISALTMALAR .......................................................................xxiii
1. GĠRĠġ ..................................................................................................................... 1
2. GKD GEREKSĠNĠMĠ VE ÇÖZÜM YÖNTEMLERĠ ........................................... 7
2.1. Tanımlar ......................................................................................................... 8
2.2. Standartlar .................................................................................................... 14
2.3. Pasif GKD Yöntemleri ................................................................................. 17
2.3.1. AA veya DA tarafına endüktör yerleĢtirilmiĢ
pasif GKD devresi .............................................................................. 20
2.3.2. AA tarafına paralel rezonant süzgeç yerleĢtirilmiĢ
pasif GKD devresi .............................................................................. 21
2.3.3. DA tarafına LCD süzgeç yerleĢtirilmiĢ pasif GKD devresi ............... 22
2.3.4. AA tarafına paralel harmonik süzgeç yerleĢtirilmiĢ
pasif GKD devresi .............................................................................. 24
2.3.5. Valley-fill doğrultuculu pasif GKD devresi ....................................... 25
2.4. Aktif GKD Yöntemleri................................................................................. 26
2.4.1. DüĢüren (buck) aktif GKD devresi .................................................... 27
x
Sayfa
2.4.2. DüĢüren-yükselten (buck-boost) aktif GKD devresi .......................... 29
2.4.2. Yükselten (boost) aktif GKD devresi ................................................. 30
3. ORTALAMA AKIM YÖNTEMĠ ĠLE KONTROL EDĠLEN SARMAġIK
YÜKSELTEN GKD DEVRE ANALĠZĠ ............................................................. 34
3.1. Klasik Yükselten Devre Analizi ................................................................... 35
3.2. SarmaĢık Yükselten Devre Analizi .............................................................. 43
3.2.1. GiriĢ akımının dalgacık miktarı.......................................................... 47
3.2.2. ÇıkıĢ geriliminin dalgacık miktarı...................................................... 49
3.2.3. Ġki kanallı sarmaĢık yükselten devrenin kararlı durum analizi........... 51
3.3. Ortalama Akım Kontrol Yöntemi................................................................. 59
4. SIFIR-GERĠLĠM-GEÇĠġLĠ YUMUġAK ANAHTARLAMA YÖNTEMĠ ........ 63
4.1. Anahtarlama Kayıpları ................................................................................. 63
4.2. Aktif YumuĢak Anahtarlama........................................................................ 70
4.3. SarmaĢık Yükselten Devre Ġçin SGG YumuĢak Anahtarlama ..................... 75
5. ÖNERĠLEN SGG SARMAġIK YÜKSELTEN GKD DEVRESĠNĠN
ANALĠZĠ VE TASARIMI ................................................................................... 80
5.1. Önerilen Devrenin Durum Analizleri ........................................................... 81
5.2. Güç Devresi Tasarım Kriterleri .................................................................... 90
5.2.1. Endüktör ve çıkıĢ kondansatör değerlerinin belirlenmesi .................. 91
5.2.2. Devrede kullanılan ana anahtar ve diyotların belirlenmesi ................ 93
5.2.3. Yardımcı devre parametrelerinin belirlenmesi ................................... 94
5.3. Kontrol Devresi Tasarımı ............................................................................. 96
5.3.1. TMS320F2812 eZdsp kartı ................................................................ 97
xi
Sayfa
5.3.2. Sinyal örnekleme devresi ................................................................. 106
5.3.3. Sürücü devresi .................................................................................. 108
5.3.4. Kontrol parametrelerinin belirlenmesi ............................................. 108
6. ÖNERĠLEN SGG SARMAġIK YÜKSELTEN GKD DEVRESĠNĠN
BENZETĠM ÇALIġMASI SONUÇLARI ......................................................... 115
7. ÖNERĠLEN SGG SARMAġIK YÜKSELTEN GKD DEVRESĠNĠN
DENEYSEL ÇALIġMA SONUÇLARI ............................................................ 129
8. SONUÇ VE DEĞERLENDĠRME ..................................................................... 150
KAYNAKLAR ...................................................................................................... 153
EKLER ................................................................................................................... 158
xii
ÇĠZELGELERĠN LĠSTESĠ
Çizelge
Sayfa
Çizelge 2.1. A ve D sınıfı cihazları için TS EN 61000-3-2 standardı...................... 15
Çizelge 2.2. C sınıfı cihazları için TS EN 61000-3-2 standardı .............................. 16
Çizelge 2.3. IEEE 519-1992 standardı ..................................................................... 17
Çizelge 3.1. SĠM akımına sahip iki fazlı sarmaĢık yükselten
devre çalıĢma durumları ....................................................................... 52
Çizelge 5.1. Önerilen SGG sarmaĢık yükselten GKD devresinin
çalıĢma durumları ................................................................................. 90
Çizelge 5.2. Önerilen devrenin tasarım çalıĢmasında kullanılan değerler ............... 91
Çizelge 5.3. GKD kontrolcülerin belirlenmesinde kullanılan değerler.................. 112
Çizelge 6.1. Benzetim çalıĢmalarında kullanılan parametreler .............................. 117
Çizelge 7.1. Önerilen SGG sarmaĢık yükselten GKD devresinin
deney sonuçları................................................................................... 147
Çizelge 7.2. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin
deney sonuçları................................................................................... 147
xiii
ġEKĠLLERĠN LĠSTESĠ
ġekil
Sayfa
ġekil 2.1. Faz-farklı voltaj ve akım grafiği ................................................................ 9
ġekil 2.2. Farklı kayma ve bozulma faktörü oranlarında gerilim-akım
dalga Ģekilleri ........................................................................................... 10
ġekil 2.3. Yalnızca doğrultucu ve çıkıĢ kondansatörü içeren
temel bir AA/DA devresi ......................................................................... 12
ġekil 2.4. Temel bir AA/DA devresinin gerilim-akım dalga Ģekilleri ..................... 12
ġekil 2.5. 300W çıkıĢ güç değerine sahip temel bir AA/DA devresinin
Ģebekeden çektiği giriĢ gerilimi ve 10*giriĢ akımı dalga Ģekilleri ........... 13
ġekil 2.6. 300W çıkıĢ güç değerine sahip temel bir AA/DA devresinin
Ģebekeden çektiği akımın harmonik bileĢenleri ....................................... 13
ġekil 2.7. IEEE 519-1992 standardının temelini oluĢturan OBN‟ı gösteren Ģekil ... 17
ġekil 2.8. Temel AA/DA devresinde farklı çıkıĢ kondansatör değerleri için
çıkıĢ gerilim dalga Ģekilleri (Vinrms = 220 V, Ro = 300 Ω) ....................... 18
ġekil 2.9. Temel AA/DA devresinde farklı çıkıĢ kondansatör değerleri için giriĢ
gerilim ve 10*giriĢ akımı dalga Ģekilleri (Vinrms = 220 V, Ro = 300 Ω) .. 18
ġekil 2.10. Temel AA/DA devresinde Co = 940 µF değeri için giriĢ akımının
harmonik analizi (Vinrms = 220 V, Ro = 300 Ω)..................................... 19
ġekil 2.11. Temel AA/DA devresinde Co = 220 µF değeri için giriĢ akımının
harmonik analizi (Vinrms = 220 V, Ro = 300 Ω)..................................... 19
ġekil 2.12. AA tarafına endüktör ilave edilmiĢ (solda) ve DA tarafına
endüktör ilave edilmiĢ (sağda) pasif GKD AA/DA devreleri ............... 20
ġekil 2.13. AA tarafına endüktör ilave edilmiĢ pasif GKD devresinin Vin-20*Iin
dalga Ģekilleri; (Vinrms = 220 V, Co = 220 µF, Ro = 300 Ω) .................. 20
ġekil 2.14. DA tarafına endüktör ilave edilmiĢ pasif GKD devresinin Vin-50*Iin
dalga Ģekilleri; (Vinrms = 220 V, Co = 220 µF, Ro = 300 Ω) .................. 21
ġekil 2.15. AA tarafına paralel rezonant süzgeç yerleĢtirilmiĢ
pasif GKD AA/DA devresi ................................................................... 22
xiv
ġekil
Sayfa
ġekil 2.16. AA tarafına paralel rezonant süzgeç yerleĢtirilmiĢ
pasif GKD AA/DA devresinin Vin-50*Iin dalga Ģekilleri ...................... 22
ġekil 2.17. DA tarafına LCD süzgeç yerleĢtirilmiĢ pasif GKD AA/DA devresi ..... 23
ġekil 2.18. DA tarafına LCD süzgeç yerleĢtirilmiĢ
pasif GKD AA/DA devresinin Vin-50*Iin dalga Ģekilleri ...................... 23
ġekil 2.19. AA tarafına paralel harmonik süzgeç yerleĢtirilmiĢ
pasif GKD devresi ................................................................................. 24
ġekil 2.20. AA tarafına paralel harmonik süzgeç yerleĢtirilmiĢ
pasif GKD devresinin Vin-50*Iin dalga Ģekilleri .................................... 24
ġekil 2.21. Valley-fill doğrultuculu pasif GKD devresi .......................................... 25
ġekil 2.22. Aktif GKD yöntemi blok Ģeması ........................................................... 26
ġekil 2.23. DüĢüren tip aktif GKD devre Ģeması ..................................................... 28
ġekil 2.24. DüĢüren tip aktif GKD devresinin gerilim ve akım dalga Ģekilleri ....... 28
ġekil 2.25. DüĢüren-yükselten aktif GKD devre Ģeması.......................................... 29
ġekil 2.26. DüĢüren-yükselten tip aktif GKD devresinin
gerilim ve akım dalga Ģekilleri .............................................................. 29
ġekil 2.27. Yükselten aktif GKD devre Ģeması ....................................................... 30
ġekil 2.28. Yükselten aktif GKD devresinin gerilim ve akım dalga Ģekilleri .......... 31
ġekil 2.29. Yükselten aktif GKD devresinin endüktör akım Ģekilleri...................... 32
ġekil 2.30. SarmaĢık yükselten aktif GKD devresi .................................................. 33
ġekil 3.1. Yükselten aktif GKD devresinin Ģematik gösterimi ................................ 35
ġekil 3.2. SĠM akım dalga Ģekline sahip yükselten devrenin eĢdeğer devreleri ...... 36
ġekil 3.3. SĠM durumunda yükselten devrenin gerilim-akım dalga Ģekilleri .......... 36
ġekil 3.4. Endüktör akım ortalama değerinin görev çarpanın ile değiĢimi .............. 38
xv
ġekil
Sayfa
ġekil 3.5. Yükselten GKD devresine uygulanan gerilim, görev çarpanı (d)
ve SĠM için gerekli L değeri değiĢimleri................................................. 40
ġekil 3.6. Yükselten devrenin ortalama model gösterimi ........................................ 43
ġekil 3.7. N-adet güç katı paralel bağlanmıĢ yükselten devrenin gösterimi ............ 45
ġekil 3.8. N-adet güç katı paralel bağlanmıĢ sarmaĢık yükselten
devrenin gösterimi ................................................................................... 45
ġekil 3.9. 3-adet güç katı içeren sarmaĢık yükselten devrenin
tetikleme sinyalleri ve akım dalga Ģekilleri .............................................. 46
ġekil 3.10. SarmaĢık yükselten devrede, giriĢ akım dalgacık miktarının
endüktör akım dalgacık miktarına ve görev çarpanına göre değiĢimi ... 49
ġekil 3.11. SarmaĢık yükselten devrede, çıkıĢ gerilim dalgacık miktarının
çıkıĢ gerilimine oranının görev çarpanına göre değiĢimi ....................... 51
ġekil 3.12. Ġki kanallı sarmaĢık yükselten devre ...................................................... 52
ġekil 3.13. Ġki kanallı sarmaĢık yükselten devrenin endüktör akımlarının
gösterimi (180° faz farklı ; d < 0,5) ....................................................... 53
ġekil 3.14. Ġki kanallı sarmaĢık yükselten devrenin d<0,5 için çalıĢma durumları . 53
ġekil 3.15. Ġki kanallı sarmaĢık yükselten devrenin endüktör akımlarının
gösterimi (180° faz farklı ; d > 0,5) ....................................................... 57
ġekil 3.16. Ġki kanallı sarmaĢık yükselten devrenin d>0,5 çalıĢma durumları ........ 58
ġekil 3.17. Ortalama akım kontrollü sarmaĢık yükselten GKD
devresinin blok gösterimi ....................................................................... 59
ġekil 3.18. Ortalama akım kontrollü GKD devresinin
doğrultulmuĢ akım dalga Ģekli ............................................................... 62
ġekil 4.1. Bir anahtarın, bir anahtarlama peryodundaki
gerilim, akım ve kayıplarını gösteren grafikler ....................................... 64
ġekil 4.2. Güç diyodu gerilim ve akım grafikleri .................................................... 65
ġekil 4.3. Yükselten devrede kullanılan bir MOSFET‟in gövde diyodu dahil
eĢdeğer devresi ve gerilime göre iletim bölgeleri ................................... 67
xvi
ġekil
Sayfa
ġekil 4.4. Güç MOSFET‟inin açma-kapama sürelerindeki
gerilim ve akım grafikleri ....................................................................... 68
ġekil 4.5. Gövde diyodu içeren IGBT anahtarının eĢdeğer devresi
ve gerilime göre iletim bölgeleri ............................................................. 69
ġekil 4.6. Güç IGBT anahtarının kesim (OFF) süresindeki
gerilim ve akım grafikleri ....................................................................... 69
ġekil 4.7. Kaynak [41]‟de aktarılan SGA pasif yumuĢak
anahtarlamalı yükselten devre ................................................................. 71
ġekil 4.8. Aktif yumuĢak anahtarlamalı yükselten dönüĢtürücü genel görünümü ... 72
ġekil 4.9. Kaynak [43] ve [44]‟de aktarılan aktif yumuĢak anahtarlamalı
yükselten devreler .................................................................................... 73
ġekil 4.10. Kaynak [48]‟de aktarılan aktif yumuĢak anahtarlamalı
yükselten devre....................................................................................... 74
ġekil 4.11. Kaynak [51] ve [52]‟de aktarılan, sarmaĢık yükselten devreye
uygulanan aktif yumuĢak anahtarlama yöntemleri ................................ 74
ġekil 4.12. SGG yumuĢak anahtarlamada kullanılan tetikleme sinyalleri ............... 75
ġekil 4.13. Rezonant olmayan SGG yumuĢak anahtarlama
yardımcı devre örnekleri ........................................................................ 76
ġekil 4.14. Rezonant SGG yumuĢak anahtarlama yardımcı devre örnekleri ........... 76
ġekil 4.15. Ġkili SGG yumuĢak anahtarlama yardımcı devre örnekleri ................... 77
ġekil 4.16. SarmaĢık yükselten GKD için önerilen SGG aktif yardımcı devre ....... 77
ġekil 5.1. Önerilen ortalama akım kontrollü SGG sarmaĢık yükselten
GKD devresi............................................................................................ 80
ġekil 5.2. Önerilen devrenin basitleĢtirilmiĢ eĢ değer devresi ................................. 81
ġekil 5.3. Önerilen devrenin bir anahtarlama peryodundaki
teorik dalga Ģekilleri (d<0,5 için) ............................................................ 83
xvii
ġekil
Sayfa
ġekil 5.4. Önerilen devrenin bir anahtarlama peryodundaki
teorik dalga Ģekilleri (d>0,5 için) ............................................................ 84
ġekil 5.5. Önerilen devrenin bir anahtarlama peryodundaki
farklı durumlarına ait eĢ değer devreleri (d>0,5 için) .............................. 85
ġekil 5.6. Önerilen devrenin akım dalga Ģekilleri ve etkin görev çarpanı ............... 92
ġekil 5.7. Önerilen çalıĢmanın kontrol devresi birimleri ......................................... 97
ġekil 5.8. TMS320F2812 eZdsp kartı ve ara birimleri ............................................ 99
ġekil 5.9. CCS programı ara yüz görünümü .......................................................... 100
ġekil 5.10. Önerilen devre için kullanılan DSP‟den üretilen PWM sinyalleri....... 105
ġekil 5.11. LA 55-P akım dönüĢtürücü devresi ..................................................... 106
ġekil 5.12. LV 25-P gerilim dönüĢtürücü devreleri ............................................... 107
ġekil 5.13. DSP ile güç devresi arasında kullanılan sürücü devresi ...................... 108
ġekil 5.14. Gerilim kontrolcüsü bode çizimi ......................................................... 113
ġekil 5.15. Akım kontrolcüsü bode çizimi ............................................................. 113
ġekil 6.1. Ortalama akım kontrollü önerilen SGG sarmaĢık yükselten
GKD devresinin Simplorer benzetim diyagramı.................................... 116
ġekil 6.2. Simplorer benzetim programının EQUBL modülü ............................... 116
ġekil 6.3. 110 V ve 220 V etkin giriĢ gerilimlerindeki çıkıĢ gerilimi
(Vo = 400 V) ........................................................................................... 118
ġekil 6.4. 110 V giriĢ gerilimi ile 5*giriĢ akımı
(Vin=110 V_rms ; iin=5,63 A_rms) ......................................................... 119
ġekil 6.5. DoğrultulmuĢ gerilim-5*akım grafikleri
(Vg =110 V_rms ; ig =5,63 A_rms) ........................................................ 119
ġekil 6.6. 220 V giriĢ gerilimi ile 50*giriĢ akımı
(Vin=220 V_rms ; iin=2,81 A_rms) ......................................................... 120
xviii
ġekil
Sayfa
ġekil 6.7. 220 V doğrultulmuĢ gerilimi ile 50*doğrultulmuĢ akım dalga Ģekilleri
(Vg =220 V_rms ; ig =2,81 A_rms) ........................................................ 120
ġekil 6.8. 220 V etkin giriĢ geriliminde elde edilen, doğrultulmuĢ akım
ve endüktör akımları dalga Ģekilleri (ig , iL1 , iL2 ) .................................. 121
ġekil 6.9. d<0,5 için doğrultulmuĢ ve endüktör akımları dalga Ģekilleri
(ig , iL1 , iL2 ) ............................................................................................ 122
ġekil 6.10. d>0,5 için doğrultulmuĢ ve endüktör akımları dalga Ģekilleri
(ig , iL1 , iL2 ) .......................................................................................... 122
ġekil 6.11. d>0,5 için M1 ana anahtarın gerilim-akım dalga Ģekilleri
(VDSM1, 20*iD,M1)................................................................................... 123
ġekil 6.12. d>0,5 için M2 ana anahtarın gerilim-akım dalga Ģekilleri
(VDSM2, 20*iD,M2)................................................................................... 123
ġekil 6.13. d<0,5 için M1 ana anahtarın gerilim-akım dalga Ģekilleri
(VDSM1, 20*iD,M1)................................................................................... 124
ġekil 6.14. d<0,5 için M2 ana anahtarın gerilim-akım dalga Ģekilleri
(VDSM2, 20*iD,M2)................................................................................... 124
ġekil 6.15. d>0,5 için Ma yardımcı anahtarın gerilim-akım dalga Ģekilleri
(VDSMa, 20*iD,Ma)................................................................................... 125
ġekil 6.16. d<0,5 için Ma yardımcı anahtarın gerilim-akım dalga Ģekilleri
(VDSMa, 20*iD,Ma)................................................................................... 125
ġekil 6.17. Cr kondansatör gerilimi ve 10*Lr endüktör akımı dalga Ģekilleri
(VCr, 10*iLr) .......................................................................................... 126
ġekil 6.18. Elektronik yük kullanılarak elde edilen; SGG sarmaĢık yükselten
GKD devresi çıkıĢ gerilimi (Vo), elektronik yük çıkıĢ gerilimi (Vo1),
giriĢ gerilimi (Vin) ve 10*giriĢ akımı (10*iin) dalga Ģekilleri .............. 127
ġekil 6.19. Elektronik yük kullanılarak elde edilen; elektronik yük giriĢ akımı
(iLoad1) ve giriĢ akımı (iin) dalga Ģekilleri .............................................. 127
ġekil 6.20. Devrenin 100 W‟taki Vin ve 200*Iin grafikleri (THBi=%15,2)............ 128
ġekil 7.1. TMS320F2812 eZdsp kartının gerçek-zaman (real-time) ikonu
kullanılarak ADC‟den örneklenen sinyallerin gözlenmesi ................... 130
xix
ġekil
Sayfa
ġekil 7.2. Önerilen devre için gerekli olan PWM sinyalleri .................................. 130
ġekil 7.3. Uygulamada kullanılan giriĢ gerilimi ve THB oranı ............................. 131
ġekil 7.4. Önerilen devrenin kontrolsüz çalıĢtırılması durumunda elde edilen
giriĢ akım dalga Ģekli ve giriĢ akım THB oranı (Vin-iin, THBi) ............. 131
ġekil 7.5. 110 V ve 220 V etkin giriĢ gerilimlerinde elde edilen
çıkıĢ gerilimi ve çıkıĢ akımı deney sonucu (Vo = 400 V, Io = 1,52 A) ... 132
ġekil 7.6. 110 V etkin giriĢ geriliminde; giriĢ gerilim-giriĢ akım dalga Ģekli ve
giriĢ akım THB oranı (Vin=110 V_rms ; iin=5,83 A; THBi=%5,12) ..... 133
ġekil 7.7. 110 V etkin giriĢ geriliminde; doğrultulmuĢ gerilim-doğrultulmuĢ
toplam akım ve endüktör akımı (iL1) dalga Ģekilleri ............................. 133
ġekil 7.8. Fluke 43B cihazı ile 110 V giriĢ geriliminde; giriĢ gerilim-giriĢ akım
dalga Ģekli, giriĢ güç katsayısı ve güç değerleri, akım THB oranı ......... 134
ġekil 7.9. 220 V etkin giriĢ geriliminde; giriĢ gerilim-giriĢ akım dalga Ģekli ve
giriĢ akım THB oranı (Vin=220 V_rms ; iin=3 A_rms ; THBi=%10,5) .. 135
ġekil 7.10. 220 V etkin giriĢ geriliminde; giriĢ gerilim-doğrultulmuĢ gerilim
dalga Ģekli ve doğrultulmuĢ gerilim-doğrultulmuĢ akım dalga Ģekli ... 135
ġekil 7.11. 300 W çıkıĢ güç ve 220 V giriĢ geriliminde; giriĢ gerilim-giriĢ akım
ve çıkıĢ gerilim-çıkıĢ akım dalga Ģekli (iin=1,43 A; THBi=%10,7) ..... 135
ġekil 7.12. 300 W çıkıĢ gücü ve 220 V etkin giriĢ geriliminde; giriĢ gerilimgiriĢ akım dalga Ģekli ve giriĢ akım THB oranı ................................... 137
ġekil 7.13. 600 W çıkıĢ gücü ve 220 V giriĢ geriliminde; giriĢ gerilim-giriĢ akım
dalga Ģekli, giriĢ güç katsayısı ve güç değerleri, akım THB oranı ....... 137
ġekil 7.14. d>0,5 ve d<0,5 için endüktör akımları dalga Ģekilleri (iL1 , iL2 ).......... 138
ġekil 7.15. d>0,5 ve d<0,5 için doğrultulmuĢ toplam akım ve birinci endüktörün
akım dalga Ģekilleri (ig , iL1) ................................................................. 139
ġekil 7.16. 600 W – 400 W çıkıĢ yük değiĢiminde, çıkıĢ gerilim ve
giriĢ akım değiĢimleri........................................................................... 139
ġekil 7.17. d>0,5 için M1 ana anahtarın gerilim-akım dalga Ģekilleri
(VDSM1, iDM1) ......................................................................................... 140
xx
ġekil
Sayfa
ġekil 7.18. d<0,5 için M2 ana anahtarın gerilim-akım dalga Ģekilleri
(VDSM2, iDM2) ......................................................................................... 140
ġekil 7.19. d>0,5 için M1 ana anahtarın gerilim-akım ve M2 ana anahtarın
akım dalga Ģekilleri (VDSM1, iDM1, iDM2) ................................................ 140
ġekil 7.20. Farklı giriĢ akımı değerlerinde; M1 ana anahtarın
ve Ma yardımcı anahtarın akım dalga Ģekilleri (iD1, iDMa) .................... 141
ġekil 7.21. d<0,5 için Ma yardımcı anahtarın gerilim-akım dalga Ģekilleri
(VDSMa, iDMa) ......................................................................................... 141
ġekil 7.22. d>0,5 için Ma yardımcı anahtarın gerilim-akım dalga Ģekilleri
(sağdaki grafikte M1 akımı ile değiĢimi verilmiĢtir) (VDSMa, iDMa) ....... 142
ġekil 7.23. Cr kondansatör gerilimi ve yardımcı anahtar akımı dalga Ģekilleri
(sağdaki grafikte M1 akımı ile değiĢimi verilmiĢtir) (VCr, iDMa) ........... 142
ġekil 7.24. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; giriĢ
gerilim-giriĢ akım ve çıkıĢ gerilim dalga Ģekilleri (600 W, 220 V) ..... 143
ġekil 7.25. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; giriĢ
gerilim-giriĢ akım ve giriĢ akım THB oranı (Fluke 43B cihazı).......... 143
ġekil 7.26. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; d<0,5 ve
d>0,5 için endüktör akımları dalga Ģekilleri (iL1 , iL2) .......................... 144
ġekil 7.27. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; d<0,5 ve
d>0,5 için doğrultulmuĢ akım ve birinci endüktörün akımı (ig , iL1).... 144
ġekil 7.28. Sert anahtarlamalı sarmaĢık yükselten GKD; farklı görev çarpanı
değerlerinde M1 ana anahtarın gerilim-akım Ģekilleri (VDSM1, iDM1) .... 144
ġekil 7.29. Sert anahtarlamalı sarmaĢık yükselten GKD; M1 ana anahtarın
gerilim-akım dalga Ģekilleri (ON ve OFF) (VDSM1, iDM1) ..................... 145
ġekil 7.30. Sert anahtarlamalı sarmaĢık yükselten GKD; farklı görev çarpanı
değerlerinde M1 gerilim-akım Ģekilleri (VDSM1, iDM1, iDM2) .................. 145
ġekil 7.31. Verim hesabı yapılırken kullanılan cihazlarla birlikte
devre görünümü ................................................................................... 147
ġekil 7.32. Önerilen SGG devre ile sert anahtarlamalı devrenin
verim karĢılaĢtırması ............................................................................ 148
xxi
ġekil
Sayfa
ġekil 7.33. Önerilen SGG devresinin farklı güçlerde giriĢ akım THB
değerinin karĢılaĢtırması ...................................................................... 129
xxii
RESĠMLERĠN LĠSTESĠ
Resim
Sayfa
Resim 7.1. Ortalama akım kontrollü önerilen SGG sarmaĢık yükselten
GKD devresinin prototipi ..................................................................... 149
xxiii
SĠMGELER VE KISALTMALAR
Bu çalıĢmada kullanılmıĢ bazı simgeler ve kısaltmalar, açıklamaları ile birlikte
aĢağıda sunulmuĢtur.
Simgeler
Açıklama
t
zaman (sn)
Vin
Ģebeke giriĢ gerilimi (V)
Vin ,rms
Ģebeke giriĢ gerilimin etkin değeri (V)
i in
giriĢ akımı (A)
i in ,rms
giriĢ akımın etkin değeri (A)
V1rms
gerilimin temel bileĢeninin etkin değeri (V)
I1rms
akımın temel bileĢeninin etkin değeri (A)
Io
akımın ortalama değeri (A)
In
akımın n. bileĢen değeri (A)
I sc
Ģebeke kısa devre akımı (A)
IL
Ģebeke tarafından görülen yük akımı (A)
L
endüktör (H)
L1 , L2
birinci ve ikinci güç katının endüktörleri (H)
Lr
yardımcı devre rezonans endüktörü (H)
C
kondansatör (F)
Co
çıkıĢ kondansatörü (F)
Cr
yardımcı devre rezonans kondansatörü (F)
Cs
yardımcı devre snubber kondansatörü (F)
R
direnç (Ω)
xxiv
Simgeler
Açıklama
Ro
çıkıĢ yük direnci (Ω)
Rmi
doğrultulmuĢ akım örnekleme direnci (Ω)
Rmg
doğrultulmuĢ gerilim örnekleme direnci (Ω)
Rmo
çıkıĢ gerilim örnekleme direnci (Ω)
Vg
doğrultulmuĢ gerilim (V)
ig
doğrultulmuĢ akım (A)
i L1 , i L2
birinci ve ikinci endüktörün akım değerleri (A)
I ort
endüktör ortalama akımı (A)
I max
endüktör tepe akımı (A)
iCo
çıkıĢ kondansatör akım değeri (A)
Vo
çıkıĢ gerilimi (V)
VL
endüktör gerilimi (V)
iL
endüktör akım dalgacık oranı (A)
i in
giriĢ akım dalgacık oranı (A)
Vo
çıkıĢ gerilim dalgacık oranı (V)
gk
güç katsayısı
k
kayma faktörü
kd
bozulma faktörü
P
aktif güç (W)
S
görünür güç (VA)
T
periyot (sn)
Ts
anahtarlama peryodu (sn)
f
Ģebeke gerilim frekansı (Hz)
fs
anahtarlama frekansı (sn)
xxv
Simgeler
Açıklama
d
görev çarpanı
Deff
etkin görev çarpanı
giriĢ akımının anahtarlama peryodu (sn)
q
giriĢ akımının görev çarpanı
M1 , M 2
ana anahtarlar
Do1 , Do2
çıkıĢ diyotları
Ma
yardımcı anahtar
VDS
anahtar kanal-kaynak gerilimi (V)
VGS
anahtar kapı-kaynak gerilimi (V)
i DM1
M1 ana anahtarlar akımı (A)
i DMa
Ma yardımcı anahtarlar akımı (A)
i Lr
Lr yardımcı devre endüktör akımı (A)
VCr
Cr yardımcı devre kondansatör gerilimi (V)
FF
Faz farkı
N
Güç katı sayısı
Kg
DoğrultulmuĢ gerilim sensörü düĢürme katsayısı
Ki
DoğrultulmuĢ akım sensörü düĢürme katsayısı
Ko
ÇıkıĢ gerilim sensörü düĢürme katsayısı
Gv
Gerilim kontrolcüsü
Gi
Akım kontrolcüsü
Vo ,ref
ÇıkıĢ gerilim referans değeri
i g , ref
Akım referans değeri
ev
Gerilim hata sinyali
ei
Akım hata sinyali
xxvi
Simgeler
Açıklama
Voff
Anahtarın kesim zamanındaki (OFF) gerilimi (V)
Von
Anahtarın açma zamanındaki (ON) gerilimi (V)
i off
Anahtarın kesim zamanındaki (OFF) akımı (A)
i on
Anahtarın açma zamanındaki (ON) akımı (A)
t off
Anahtarın kesim (OFF) süresi (sn)
t on
Anahtarın açma (ON) süresi (sn)
W off
Anahtarın kesim (OFF) süresinde oluĢan enerji (J)
Won
Anahtarın açma (ON) süresinde oluĢan enerji (J)
Wiletim
Anahtarın iletim süresinde oluĢan enerji (J)
Port
Ortalama anahtar kaybı (W)
Psw
Anahtarlama kaybı (W)
I RM
Diyot ters akımının tepe değeri (A)
t rr
Diyot akımı ters dönüĢüm zamanı (sn)
Pin
GiriĢ güç (W)
Po
ÇıkıĢ güç (W)
td
SGG için gerekli gecikme süresi (sn)
K P1 , K I1
Gerilim kontrolcüsü katsayıları
K P2 , K I 2
Akım kontrolcüsü katsayıları
xxvii
Kısaltma
Açıklama
AA
Alternatif akım
ADC
Analog-dijital dönüĢtürücü
AGS
Alçak geçirgen süzgeç
AGD
Anahtarlamalı güç dönüĢtürücüleri
CCM
Continuous conduction mode
DA
Doğru akım
EV
Olay yöneticisi
EMI
Elektromanyetik giriĢim
GKD
Güç katsayısı düzeltme
KĠM
Kesikli iletim modu
MOSFET
Metal oksit yarı-iletken alan etkili transistör
IGBT
YalıtılmıĢ kapı bipolar transistörü
OBN
Ortak bağlantı noktası
PFC
Power factor correction
PWM
Pulse density modulation
SAA
Sıfır akım anahtarlama
SGA
Sıfır gerilim anahtarlama
SAG
Sıfır akım geçiĢli
SGG
Sıfır gerilim geçiĢli
SĠM
Sürekli iletim modu
SRM
Sınır iletim modu
THB
Toplam harmonik bozulma
ZVT
Zero voltage transition
1
1. GĠRĠġ
ġebekede mevcut elektrik enerjisi bir çok uygulama için doğrudan kullanıma müsait
değildir. Bu nedenle, alternatif akım (AA) formunda olan Ģebeke ile doğru akım
(DA) formunda gerilim gereksinimi olan yükler arasında AA/DA anahtarlamalı güç
dönüĢtürücüleri (AGD) kullanılır. 50 Hz‟lik Ģebekeden beslenen bir çok cihazın
içerisinde bu güç dönüĢümünü yapan devreler mevcuttur. Tüketicilerin evlerde ve
iĢyerlerinde kullandıkları cihazlar (bilgisayar, tv, kamera, fotokopi makinası, motor
sürücüleri, kaynak makineleri, endüksiyon ve ark fırınları, flüoresan lambalar, v.s.)
düĢünüldüğünde, AA/DA dönüĢtürücüleri kullanılan elektrik enerjisinin büyük bir
bölümünde rol oynamaktadırlar.
AA/DA dönüĢtürücüleri en basit halde doğrultucu devre (diyotlu veya tristörlü) ve
büyük bir kapasitif süzgeç içerirler. Her hangi bir düzeltici devre kullanılmadığı
taktirde, bu doğrultucu ve kapasitif süzgeç içeren AA/DA dönüĢtürücüleri Ģebekeden
doğrusal olmayan akımların çekilmesine ve dolayısıyla harmonik içeren düĢük giriĢ
güç katsayılı (gk) giriĢ akımı üretilmesine neden olarak, elektrik Ģebekesinin
kirlenmesine yol açmaktadırlar. ġebekeden çekilen bu doğrusal olmayan akımlar
kullanılan cihazların boyutunu arttırdığı gibi harmonik içeriğinden dolayı Ģebeke
geriliminin bozulmasına yol açar ve aynı Ģebekeden beslenen diğer kullanıcıları da
olumsuz etkiler. AA/DA dönüĢtürücüleri içeren bir cihazın elektrik Ģebekesinde
oluĢturduğu kirlilik az olabilir, fakat bir tüketicinin birden çok cihaza sahip olduğunu
ve aynı elektrik Ģebekesini binlerce tüketicinin kullandığını düĢünürsek, binlerce
cihaz tarafından üretilen akım harmonikleri Ģebekeyi önemli ölçüde kirletmektedir.
Elektrik enerjisine olan talebin hızla arttığı günümüzde, bu durum uluslararası
düzenleyici kuruluĢların dikkatini önemli ölçüde çekmiĢtir. Devletler üretilen
cihazların Ģebekeden çektikleri akımların harmonik içeriğini ve güç katsayısını
düzenleyici standartlar geliĢtirmiĢlerdir. Bu nedenle, AA/DA dönüĢümü içeren
cihazlarda giriĢ akım güç katsayısını ve harmonikleri düzenleyen Güç Katsayısı
Düzeltme (GKD) devrelerine ihtiyaç duyulmaktadır.
2
AA/DA dönüĢtürücülerde giriĢ akım güç katsayısı ve harmonik bozulmaları
iyileĢtirmek için doğrultucu devre ile birlikte pasif süzgeçler kullanılabilir. Pasif
devre elemanlarından (endüktör, L ve kondansatör, C) yapılan bu süzgeçlerin ucuz
olmaları ve herhangi bir kontrol devresine ihtiyaç duymamaları en büyük
avantajlarıdır. Sistemin boyutunu arttırmaları, her bir harmonik bileĢen için ayrı ayrı
tasarım
gerektirdikleri,
empedanslarının
zamanla
değiĢmeleri
en
büyük
dezavantajları olarak sayılabilir. AA/DA devrelerinde giriĢe seri bağlanan bir süzgeç
endüktörü
giriĢ
akımının
güç
katsayısını
ve
harmonik
bozulmasını
düzeltebilmektedir. Fakat yine de uluslararası standartlarda belirtilen değerlerde
düzeltme yapamaz. Orta ve büyük güç değerlerine (>100 W) sahip devrelerde
kullanılan pasif süzgeç elemanları (L, C) devre boyutunu önemli ölçüde
arttırdığından
pek
tercih
edilmezler.
Bu
nedenlerden
dolayı,
AA/DA
dönüĢtürücülerinde giriĢ akım güç katsayısını düzeltmek ve akım harmonik miktarını
düĢürmek için pasif süzgeç yöntemi uygun değildir (özellikle 100 W‟ın üzerindeki
güç değerlerinde).
ġebeke için doğrusal yük olmayan temel AA/DA devrelerinde 1‟e yakın giriĢ güç
katsayısı ve düĢük harmonik içerikli sinüzoidal dalga Ģekline sahip giriĢ akımı elde
etmek için aktif GKD devrelerin kullanılması oldukça uygun bir yöntemdir. Aktif
GKD yönteminde doğrultucu devre ile çıkıĢ kondansatörü arasına giriĢ akımın
frekansından daha yüksek anahtarlama frekansına sahip bir dönüĢtürücü devre
yerleĢtirilir. ÇıkıĢ gerilimini regüle etmek ve giriĢ güç katsayısını yükseltmek için
kullanılan GKD devresi bir kontrol devresine ihtiyaç duyar. Bu kontrol devresi
vasıtasıyla giriĢ akımının dalga Ģekli ideal sinüzoidale yakın olup, 1‟e yakın giriĢ güç
katsayısı elde edilir. Bu nedenle doğrusal olmayan yükler Ģebeke için ideal rezistif
yüklere dönüĢtürülmüĢ olur. Diğer taraftan, doğrultucu devre ile çıkıĢ kondansatörü
arasına yüksek frekanslı dönüĢtürücü devre eklenmesi, aktif GKD devresinin
anahtarlama kayıplarından dolayı, toplam devre veriminin düĢmesine neden olur.
Ayrıca, toplam devre maliyetini arttıran aktif GKD devresi yüksek anahtarlama
frekansından dolayı devrede yüksek EMI (elektromanyetik giriĢim) oluĢmasına yol
açar.
3
Ulusal/uluslararası standartları karĢılayabilmek için AA/DA güç dönüĢümü ihtiyacı
duyulan uygulamalarda aktif GKD devrelerinin kullanılması kaçınılmaz olmuĢtur.
Güç kalitesinin arttırılması için kullanılan ve yük ile Ģebeke arasına ilave edilen bu
devrelerin küçük boyutlu olmasının yanı sıra verimli olmaları da önemli bir çalıĢma
konusu olmuĢtur. GKD devrelerin küçük boyutlu olması için anahtarlama frekansı
yükseltilir. Fakat bu devrelerde anahtarlama frekansı arttıkça anahtarlama kayıpları
artmakta ve toplam devre verimi düĢmektedir. IGBT ve MOSFET gibi yüksek
frekanslarda çalıĢabilen anahtarların kullanıldığı GKD devrelerinin verimini
arttırmak için sıfır-gerilim-anahtarlaması (SGA) ve sıfır-akım-anahtarlaması (SAA)
yöntemlerinin yanı sıra sıfır-gerilim-geçiĢli (SGG) ve sıfır-akım-geçiĢli (SAG)
yumuĢak anahtarlama yöntemleri de geliĢtirilmiĢtir. Bunlardan SGA ve SAA
yöntemleri için sadece pasif devre elemanları kullanılarak yumuĢak anahtarlama
yapılabildiği gibi, içerisinde aktif güç yarı iletken anahtarı ve pasif devre elemanları
barındıran aktif yardımcı devrelerle de yumuĢak anahtarlama yapılabilmektedir.
Fakat, SGG ve SAG yöntemlerinde kullanılan yardımcı devreler mutlaka aktif
anahtar içerirler. YumuĢak anahtarlama yöntemi anahtarlama kayıplarını azalttığı
gibi EMI üretimini de azaltmaktadır. Bir GKD devresinin verimi yumuĢak
anahtarlama ile arttırıldığında, yumuĢak anahtarlama için kullanılan yardımcı
devrenin içerdiği elemanların az olması (boyutu artmasın diye) ve yardımcı devrenin
kontrol kısmını karmaĢık hale getirmemesi hususları dikkat edilecek en önemli
unsurlar olarak karĢımıza çıkmaktadır.
Uluslararası kuruluĢlar tarafından getirtilen zorunlu sınırlamalardan dolayı, doğrusal
olmayan yükler tarafından üretilen akım harmoniklerinin düzenlenmesinde aktif
GKD devrelerinin kullanımı oldukça artmıĢtır. Aktif GKD devrelerine her ne kadar
zorunluluklardan dolayı ihtiyaç duyulsa da, yükten önce kullanılan bir ön düzenleyici
devre (pre regulator) olduğundan küçük boyutlu, düĢük maliyetli ve verimli olması
istenir. Bu nedenle, yumuĢak anahtarlama yöntemlerinden biri kullanılarak daha
verimli aktif GKD devresi tasarımı uzun yıllardır önemli bir bilimsel çalıĢma konusu
olmuĢtur. Aktarılan nedenlerden dolayı, orta ve yüksek güçlerde sıklıkla kullanılan
tek fazlı sarmaĢık yükselten tip aktif GKD devresi için yeni bir yumuĢak anahtarlama
4
yöntemi geliĢtirilerek daha verimli ve düĢük maliyetli bir ön düzenleyici devre
tasarımı bu tez çalıĢmasının amacını oluĢturmuĢtur. Ayrıca, tek fazlı sarmaĢık
yükselten aktif GKD devresinin detaylı analizi yapılarak devre yapısının anlaĢılması
ve GKD devrelerinde sıklıkla kullanılan ortalama akım kontrol yönteminin DSP
tabanlı uygulanması bu çalıĢmanın amaçları arasındadır.
Hedeflenen amaçlar doğrultusunda çalıĢmalar yapılmıĢ ve bu tez çalıĢması
sonuçlandırılmıĢtır. ÇalıĢmalar sonucunda, yumuĢak anahtarlama yöntemlerinden
olan SGG yöntemi kullanılarak sarmaĢık yükselten tip aktif GKD devresine uygun
yeni bir yardımcı devre geliĢtirilmiĢtir. Literatürde mevcut benzer çalıĢmalar
incelendiğinde, sarmaĢık yükselten tip aktif GKD devresi için geliĢtirilen bu yeni
yardımcı devre daha az sayıda aktif ve pasif devre elemanları içermektedir. Bu
vasıtayla, daha düĢük maliyetli ve daha düĢük boyutlu verimli bir sarmaĢık yükselten
aktif GKD ön düzenleyici devresi tasarlanmıĢtır. Önerilen devrede kullanılan
ortalama
akım
kontrol
yöntemi
TMS320F2812
eZdsp
kartı
kullanılarak
uygulandığından, bu çalıĢma, günümüzde kullanım alanı gittikçe geniĢleyen DSP
kartının güç elektroniği dönüĢtürücülerinde kullanılmasına bir örnek teĢkil
etmektedir.
Tez çalıĢması süresince yapılan ve aĢağıda özetlenen literatür araĢtırması ilgili
bölümlerde de aktarılmıĢtır.
Grigore (2001) ve Basu (2006) çalıĢmalarında, AA/DA dönüĢtürücülerinde pasif ve
aktif GKD uygulamalarını aktararak, GKD uygulamalarında kullanılan devreleri
detaylı bir Ģekilde incelemiĢlerdir [7-8].
AA/DA dönüĢtürücülerde, GKD‟nin uygulanması, yeni GKD devreleri geliĢtirme,
GKD devrelerinin analizi ve uygulamasına yönelik bir çok çalıĢma mevcuttur.
Yapılan literatür araĢtırmasında, [9-13] numaralı kaynaklar bu çalıĢmaların temelini
oluĢturmaktadır.
5
AA/DA dönüĢtürücülerin Ģebeke akımı üzerindeki olumsuzlukları gidermek için bir
takım ulusal ve uluslararası standartlar getirilmiĢtir. Uluslararası kuruluĢlar
tarafından yayımlanan bu standartlar üzerindeki çalıĢmalar uzun yıllar önce baĢlamıĢ
ve geliĢtirilmesi yönünde çalıĢmalar devam etmektedir [4-5].
Literatürde yapılan çalıĢmaların çoğu yükselten tip GKD devresine yöneliktir. Tez
konusu olan sarmaĢık yükselten GKD devresine yönelik yapılan bazı çalıĢmalar [1416], [21-23] ve [28]‟de aktarılmıĢtır. Bu çalıĢmalar, sarmaĢık yükselten GKD
devresinin analizi, kontrolü ve uygulamasını içermektedir. SarmaĢık yükselten GKD
devresinin detaylı analizi [30-33] numaralı kaynaklarda ele alınmıĢtır.
GKD devreleri için geliĢtirilmiĢ bir çok kontrol yöntemi olmasına rağmen, temel
olarak kullanılan kontrol yöntemleri bir kaç tanedir. [24-27] kaynakları GKD için
kullanılan temel kontrol yöntemlerini aktarmaktadırlar. Yükselten ve sarmaĢık
yükselten GKD devresinde en çok tercih edilen ortalama akım kontrol yöntemi [30]
ve [36] numaralı kaynaklarda detaylı bir Ģekilde incelenmiĢtir.
Yükselten tip dönüĢtürücünün yumuĢak anahtarlamasına yönelik literatürde bir çok
çalıĢma olmasına rağmen, sarmaĢık yükselten dönüĢtürücüye yumuĢak anahtarlama
uygulanmıĢ çalıĢma sayısı oldukça azdır. Ayrıca, bu çalıĢmaların büyük bir bölümü
DA/DA devrelerine uygulanmıĢtır. Yükselten dönüĢtürücüye pasif yumuĢak
anahtarlama uygulamıĢ temel çalıĢmaları [39-41]‟den, aktif yumuĢak anahtarlama
uygulanmıĢ temel çalıĢmaları da [42-50]‟den inceleyebiliriz. Tez konusu sarmaĢık
yükselten dönüĢtürücüye aktif yumuĢak anahtarlama uygulanmıĢ temel çalıĢmalar ise
[51] ve [52]‟de aktarılmıĢtır.
Genel giriĢ, amaç ve katkısı birinci bölümde aktarılan bu tez çalıĢması sekiz ayrı
bölümden oluĢmaktadır.
Tezin ikinci bölümünde, GKD gereksinimi ve çözüm yöntemleri baĢlığı altında;
konuyla ilgili tanımlar, standartlar, pasif ve aktif GKD yöntemleri ele alınmıĢtır.
6
Ayrıca, yükselten tip devrenin türetilmiĢi olan sarmaĢık yükselten devre tanıtılmıĢtır.
Ortalama akım kontrolü ile kontrol edilen sarmaĢık yükselten GKD devresinin
detaylı analizi üçüncü bölümde aktarılmıĢtır. Dördüncü bölümde, güç elektroniği
dönüĢtürücülerinde oluĢan anahtarlama kayıpları verilerek tez çalıĢmasında önerilen
SGG yumuĢak anahtarlama yöntemi tanıtılmıĢtır. Önerilen SGG sarmaĢık yükselten
devrenin tasarımı ve çalıĢmada kullanılan DSP tabanlı kontrolcü tasarımı çalıĢmanın
beĢinci bölümünde aktarılmıĢtır. Önerilen devrenin benzetim çalıĢma sonuçları ve
deneysel çalıĢma sonuçları ise sırasıyla altıncı ve yedinci bölümlerde ele alınmıĢtır.
Yapılan çalıĢmanın sonuç ve değerlendirme kısmı ise sekizinci bölümde
aktarılmıĢtır.
7
2. GKD GEREKSĠNĠMĠ VE ÇÖZÜM YÖNTEMLERĠ
Günümüzde kullanılan bir çok cihaz güç elektroniği devresi içerdiğinden doğrusal
olmayan akımların çekilmesine dolayısıyla harmoniklerin üretilmesine neden olarak
elektrik Ģebekelerinin kirlenmesine yol açmaktadırlar. Güç elektroniği devresi içeren
(özellikle AA/DA dönüĢtürücü içeren) bir cihazın elektrik Ģebekesinde oluĢturduğu
kirlilik az olabilir, fakat bir tüketicinin birden çok cihaza sahip olduğunu ve aynı
elektrik Ģebekesini binlerce tüketicinin kullandığını düĢünürsek, üretilen akım
harmonikleri Ģebekeyi önemli ölçüde kirletmektedir.
Yarı iletken anahtarlar içeren devreler ile beslenen cihazlar (motorlar, kaynak
makineleri, endüksiyon ve ark fırınları, flüoresan lambalar v.s.) çektikleri aktif gücün
yanı sıra önemli miktarda reaktif güç çekerler. Çekilen reaktif güç kontrolsüz
bırakıldığında, güç katsayısı düĢer. Bu da, dağıtım tesislerinin aktif güç bakımından
normal kapasitenin altında çalıĢmasına neden olur. Bu suretle ekonomik olmayan bir
iĢletme meydana geldiği gibi, elektrik enerjisine olan talebin hızla arttığı günümüzde,
enerji sıkıntısına sebep olur. Bu nedenle, cihazların elektrik Ģebekesinden çektikleri
akımların içerdiği harmonik miktarının sınırlandırılması ve giriĢ güç katsayısının
düzeltilmesi kaçınılmaz olmuĢtur.
GKD yapılmadığı taktirde, harmonik içerikli Ģebeke akımının güç sisteminde
meydana getirdiği bazı olumsuzluklar aĢağıda özetlenmektedir.
Motor, jeneratör gibi cihazlarda akım harmoniklerinden kaynaklanan ısınmaların
oluĢması,
Güç devresinde elektromanyetik giriĢimlerin (EMI) oluĢması,
Akım harmoniklerinden dolayı oluĢan gerilim harmoniklerinin yüksek tepe
değerlerinde, kablolarda, sarımlarda veya kondansatörlerde zayıf izolasyonların
oluĢması ve bozulmaların meydana gelmesi,
Gerilim
harmoniklerinden
çalıĢmaması,
kaynaklı
çeĢitli
elektronik
cihazların
düzgün
8
Kontrol Sinyallerinde bozulmaların oluĢması,
ġebeke hattının yüklenebilirliğinin azalması,
Yukarıda aktarılan nedenlerden dolayı, cihazların elektrik Ģebekesinden çektikleri
akımların içerdiği harmonik miktarını sınırlamak için Güç Katsayısı Düzeltme
(GKD) gereksinimi doğmuĢtur.
2.1. Tanımlar
EĢ. 2.1‟de verildiği gibi ideal bir sinüzoidal gerilim düĢünürsek, T(1/ ) peryoduna
sahip Vin(t) giriĢ geriliminin doğrusal olmayan bir yük için sağladığı giriĢ akımı Iin(t)
sinüzoidal olmayıp, Fourier serisi açılımı kullanılarak EĢ. 2.2 ile ifade edilir [1].
Vin (t )
I in (t )
(2.1)
2V1rms sin( t )
I0
I n sin(n t
)
(2.2)
n 1
burada, V1rms giriĢ gerilimine ait temel bileĢenin etkin değerlerini ifade eder. Ġdeal bir
sinüzoidal gerilim için gerilimin temel bileĢeninin etkin değeri gerilimin etkin
değerine eĢittir (V1rms = Vrms). Io, giriĢ akımının ortalama değerlerini In ise n.
bileĢenindeki değerini ifade eder. θ, akımın temel bileĢeninin etkin değeri ile
gerilimin etkin değeri arasındaki kayma açısıdır.
Güç katsayısı (gk), bir alternatif akım (AA) giriĢinden çekilen aktif gücün (P)
görünür güce (S) oranıdır.
gk
P
S
(2.3)
9
P
1T
Vin (t ) I in (t ) dt Vrms I1rms cos
T0
(2.4)
S
Vrms I rms
(2.5)
burada, Vrms gerilimin Irms ise akımın etkin değerlerini ifade eder. ġekil 2.1‟de
gösterilen ideal bir sinüzoidal gerilim dalga Ģeklinde, güç katsayısı kayma faktörü
(displacement factor, kθ) ve bozulma faktörünün (distortion factor, kd) çarpımından
oluĢmaktadır. Kayma faktörü, kθ , gerilimin etkin değeri (Vrms) ile akımının temel
bileĢeninin etkin değeri (I1rms) arasındaki kayma açısının kosinüsüdür (cos ).
Bozulma faktörü, kd , ise akımın temel bileĢeninin etkin değerinin (I1rms) akımın
toplam etkin değerine (Irms) oranıdır. EĢ. 2.4 ve 2.5‟i kullanarak, bu tanımları aĢağıda
aktarılan matematiksel eĢitlikler ile ifade edebiliriz [2].
gk
Vrms I1rms cos
Vrms I rms
kd
I1rm s
I rm s
(2.7)
k
cos
(2.8)
Vin(t)
I1rms cos
I rms
kd k
(2.6)
Iin(t)
I1rms
0
Ө
π
ġekil 2.1. Faz-farklı voltaj ve akım grafiği
2π
t
10
ġekil 2.2‟de farklı kayma ve bozulma faktörü oranlarına sahip gerilim-akım dalga
Ģekilleri gösterilmektedir.
Vin
Vin
Iin
Iin
t
t
kθ=1 , kd<1
kθ<1 , kd<1
Vin
Vin
Iin
Iin
t
t
kθ=1 , kd=1
kθ<1 , kd=1
ġekil 2.2. Farklı kayma ve bozulma faktörü oranlarında gerilim-akım dalga Ģekilleri
kθ değerinin küçülmesi aynı yük için daha büyük görünür güç çekildiği anlamına
gelmektedir. Bu da Ģebekenin verimini düĢürür. kd değerinin küçülmesi ise daha fazla
harmonik akımların üretildiği anlamına gelir. Bu da, Ģebekeyi kirleterek diğer
kullanıcıların olumsuz etkilenmesine yol açar.
Doğrusal olmayan bir yükün Ģebekeden çektiği ve akımın etkin değerine göre
hesaplanan Toplam Harmonik Bozulma (THB) değeri;
THB (%) 100 x
2
I rms
I12rms
I12rms
100 x
I h2
I12rms
100 x
1
k d2
1
(2.9)
eĢitliği ile ifade edilir. Burada, Ih akımın içerdiği toplam harmonik miktarını ifade
eder. EĢ. 2.6 ile EĢ. 2.9‟u ele alırsak, gerilimin etkin değeri ile akımının temel
bileĢeninin etkin değeri arasındaki kayma açısı sıfır olduğunda (yani cos =1) k
değeri 1‟e ve gk değeri ise kd değerine eĢit olur. Bu durumda, akımın THB değerini,
gk cinsinden EĢ. 2.10 ile ifade edebiliriz.
11
THB (%) 100 x
1 gk 2
(2.10)
gk 2
EĢ. 2.10‟dan, gk değeri 1‟e eĢit yada 1‟e çok yakın olan bir akımın THB değerinin de
çok düĢük olduğu görülmektedir. Örneğin, gk değeri 0,95 olan bir akımın THB değeri
ise %32,9‟dur. Görüldüğü gibi, 0,95 gibi yüksek bir gk değerine sahip olan bir
akımın THB değeri istenilen miktardan daha yüksek olabilmektedir. Bu nedenle, bir
cihazın çektiği akımın gk değerinin standartlarla belirlenmesinin yanı sıra bu akımın
içerdiği harmonik akımların miktarlarının da sınırlandırılması gerekmektedir.
THB değeri bir cihazın her hangi bir güç değerinde çektiği akımın etkin değerine
göre hesaplanırken, IEEE 519-1992 standardının dikkate aldığı TDD değeri ise bir
cihazın çektiği maksimum akımın temel bileĢenine göre hesaplanır. EĢ. 2.11 ile
verilen TDD (Total Demand Distortion) Toplam Harmonik Talebi ifade eder.
TDD (%) 100 x
2
I rms
I12rms
2
I Lrms
(2.11)
EĢ. 2.11‟de verilen ILrms bir cihazın (yükün) çekebildiği maksimum akımı ifade eder.
Cihaz düĢük güçlerde çalıĢtırılsa bile, TDD hesaplanırken cihazın nominal gücünde
çekebileceği maksimum akım dikkate alınır.
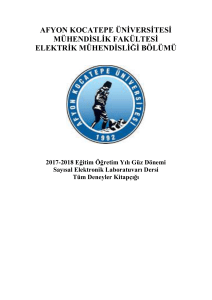
Yukarıda aktarılan tanımlar ıĢığında temel bir AA/DA devresini incelersek; ġekil
2.3‟te gösterildiği gibi, temel bir AA/DA dönüĢtürücü devresi bir doğrultucu devre
ve çıkıĢında büyük bir kapasitif süzgeç içerir. Her hangi bir düzeltici devre
kullanılmadığı taktirde, bu doğrultucu ve kapasitif süzgeç içeren AA/DA
dönüĢtürücü Ģebekeden doğrusal olmayan harmonik içeren düĢük giriĢ güç katsayılı
akımın çekilmesine ve dolayısıyla elektrik Ģebekesinin kirlenmesine yol açmaktadır.
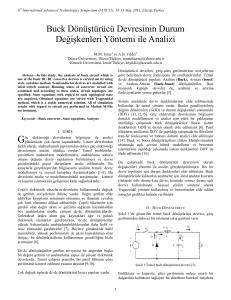
Temel AA/DA devresinin çekmiĢ olduğu akımdaki yüksek harmonik oranı, ġekil
2.4‟te görüldüğü gibi, doğrultucu devresindeki diyotların iletim sürelerinin çok kısa
12
olmasından kaynaklıdır [3]. ÇıkıĢ DA gerilim değerinin düĢük dalgacık oranına sahip
olması için genellikle yüksek değerli kondansatör kullanılır. Bu nedenle, çıkıĢ
kondansatörü tam dolduğu zaman, diyotların iletim süresi çok kısa olur ve Ģebekeden
yüksek harmonik içerikli akım çekilir.
Iin
Co
Vin
Ro
Vo
Doğrultucu
ġekil 2.3. Yalnızca doğrultucu ve çıkıĢ kondansatörü içeren temel bir AA/DA devresi
V/I
GiriĢ Gerilimi
0
2π
t
Kondansatör Gerilimi
DoğrultulmuĢ Gerilim
t
0
Diyot Akımı
0
0
t
t
GiriĢ Akımı
ġekil 2.4. Temel bir AA/DA devresinin gerilim ve akım dalga Ģekilleri
13
ġekil 2.5 ve 2.6‟da etkin değeri 220 V, hat direnci 0.4 Ω, hat endüktansı 1 mH ve
çıkıĢ kondansatör değeri 940 µF olan 300 W çıkıĢ güç değerinde temel bir AA/DA
dönüĢtürücünün benzetim çalıĢmasından elde edilmiĢ giriĢ gerilim-giriĢ akım dalga
Ģekilleri ve giriĢ akımının harmonik bileĢenleri aktarılmıĢtır.
300
Vin
200
Vin-10*Iin
100
0
10*Iin
-100
-200
-300
0.16
0.165
0.17
0.175
0.18
0.185
0.19
0.195
0.2
zaman (sn)
ġekil 2.5. 300W çıkıĢ güç değerine sahip temel bir AA/DA devresinin Ģebekeden
çektiği giriĢ gerilim ve 10*giriĢ akımı dalga Ģekilleri (benzetim çalıĢması)
5
0
-5
0.2
0.21
0.22
0.23
zaman (sn)
0.24
0.25
Temel bilesen (50Hz) = 1.989 , THB= 144.20%
Temel bilesenin %'si
100
80
60
40
20
0
0
2
4
6
8
10
12
Harmonik mertebesi
ġekil 2.6. 300W çıkıĢ güç değerine sahip temel bir AA/DA devresinin Ģebekeden
çektiği akımın harmonik bileĢenleri (benzetim çalıĢması)
14
Görüldüğü üzere temel AA/DA devresi kullanılarak DA gerilimi elde edilmesi
yüksek harmonik içerikli akımların çekilmesine yol açar (çekilen akımın THB değeri
% 144,20). Bu da Ģebeke akımını önemli ölçüde kirleterek aynı Ģebekeye bağlı diğer
cihazların da olumsuz etkilenmesine yol açar.
2.2. Standartlar
Önceki kısımlarda açıklandığı üzere, Ģebeke akımı üzerindeki olumsuzlukları
gidermek için bir takım ulusal ve uluslararası standartlar getirilmiĢtir. Bu standartlar
üzerindeki çalıĢmalar uzun yıllar önce baĢlamıĢ ve geliĢtirilmesi yönünde çalıĢmalar
devam etmektedir. ġebeke akımının harmonik içeriğini düzenlemek amacı ile
geliĢtirilen temel standartlar aĢağıda aktarılmıĢtır.
EN 61000-3-2 (Avrupa Birliği Standardı)
1982‟den
önce
IEC
(International
Electrotechnical
Committee)
tarafından
yayımlanan IEC 555-2 kodlu standart 1987 yılında CENELEC (European Committee
for Electrotechnical Standardization) tarafından EN 60555-2 kodu ile Avrupa Birliği
standardına uyarlanmıĢtır. IEC 555-2 standardı 1995 yılında IEC 1000-3-2 olarak
değiĢtirilince, CENELEC de Avrupa Birliği standardını EN 61000-3-2 olarak
değiĢtirmiĢtir. Günümüzde halen geçerli olan Avrupa Birliği standardı EN 61000-3-2
kodlu standarttır. Avrupa Birliği uyum yasaları çerçevesinde, ülkemiz de Avrupa
Birliği tarafından kullanılan EN 61000-3-2 kodlu standardı, TS EN 61000-3-2 kodu
ile kullanmaktadır. Avrupa Birliği tarafından kabul edilen bu standart, 230V50Hz‟lik tek fazlı Ģebeke veya 400V-50Hz‟lik üç fazlı Ģebekeye bağlanan faz baĢına
16A etkin akım çeken cihazlar için uygulanmaktadır. Bu standart kapsamındaki
cihazlar, tipine bağlı olarak A, B, C ve D olarak sınıflandırılmıĢtır.
TS EN 61000-3-2 standardı kapsamındaki cihazlar için getirtilen akım harmonik
miktarlarına ait sınırlamalar Çizelge 2.1. ve Çizelge 2.2‟de aktarılmıĢtır [4-5].
15
Çizelge 2.1. A ve D sınıfı cihazları için TS EN 61000-3-2 standardı
A Sınıfı Cihazlar
D Sınıfı Cihazlar
Güç Sınırı
Nispi Güç Aralığı
Tam Güç Aralığı
(Güç Sınırı Yok)
(600 W ≥ Güç > 75 W)
(600 W ≥ Güç > 75 W)
Azami izin
Watt baĢına azami izin
Azami izin
Harmonik
verilebilen
verilebilen harmonik
verilebilen harmonik
mertebe
harmonik akımı
akımı (mA/W)
akımı
(n)
(A)
(A)
Tek Harmonikler
3
5
7
9
11
13
15≤n≤39
2,30
1,14
0,77
0,40
0,33
0,21
(D Sınıfı)
2,30
1,14
0,77
0,40
0,33
AĢağıdaki eĢitlikler kullanılır
(A Sınıfı)
13≤n≤39
3,4
1,9
1
0,5
0,35
2,25/n
3,85/n
2,25/n
Çift Harmonikler
2
1,08
4
0,43
6
0,30
8≤n≤40
(A Sınıfı)
Uygulanmaz
1,84/n
Belirtilen sınıflandırma guruplarına giren cihaz tipleri aĢağıda aktarılmıĢtır.
A Sınıfı; Dengeli 3-fazlı cihazlar, sınıf D olarak belirtilen cihazlar hariç olmak
üzere evlerde kullanılan aletler, taĢınabilir aletler hariç diğer aletler, akkor
lambalar için kısıcılar, ses cihazları, diğer üç sınıfta adlandırılmayan cihazlar.
B Sınıfı; TaĢınabilir aletler, profesyonel cihaz olmayan ark kaynak cihazları.
16
C Sınıfı; Aydınlatma cihazları.
D Sınıfı; KiĢisel bilgisayarlar ve kiĢisel bilgisayar ekranları, televizyon alıcıları,
600 W‟a eĢit olan yada 600 W‟tan düĢük olan (>75 W) cihazlar.
Çizelge 2.2. C sınıfı cihazları için TS EN 61000-3-2 standardı
Temel frekansta giriĢ akımının %‟si
Harmonik
olarak ifade edilen azami izin
mertebe
verilebilen harmonik akımı
(n)
(%)
2
2
3
30 x devre güç katsayısı
5
10
7
7
9
5
13≤n≤39
3
IEEE 519-1992 Standardı
IEEE tarafından geliĢtirilen bu standart her hangi bir cihaz gereksinimine göre değil
de, ġekil 2.7‟de gösterildiği gibi, kullanıcının Ģebekeye bağlandığı Ortak Bağlantı
Noktasına (OBN) göre üretilen harmonik akımlarını düzenler. Bu standart genellikle
faz baĢına 110V etkin Ģebeke gerilimini kullanan ülkelerde (ABD gibi) uygulanır.
IEEE 519-1992 standardının OBN‟nin kısa devre akımı ve yükün maksimum
akımının temel bileĢenine bağlı olarak getirdiği sınırlamalar Çizelge 2.3‟de
aktarılmıĢtır. Çizelge 2.3‟te aktarılan Isc OBN‟da çekilebilecek kısa devre akımını ve
IL ise Ģebeke tarafından görülen yükün maksimum akımını ifade eder.
Daha önce açıklandığı gibi, bu standardın temel aldığı değer THD değil TDD (Total
Demand Distortion) dir. TDD hesaplanırken yükün maksimum akımı dikkate
17
alındığından, bir cihazın TDD değeri nominal güç değerinde THD‟ye eĢittir. Fakat,
bir cihaz düĢük güç değerlerinde çalıĢtırıldığında, THD değeri yükselirken TDD
değeri düĢer.
Lin
IL
.
Vin
Yük-1
OBN
Yük-2
Yük-n
ġekil 2.7. IEEE 519-1992 standardının temelini oluĢturan OBN‟ı gösteren Ģekil
Çizelge 2.3. IEEE 519-1992 standardı
Isc/IL
n<11
11≤n<17
17≤n<23
23≤n<35
35≤n
TDD (%)
<20
4,0
2,0
1,5
0,6
0,3
5,0
20<50
7,0
3,5
2,5
1,0
0,5
8,0
50<100
10,0
4,5
4,0
1,5
0,7
12,0
100<1000
12,0
5,5
5,0
2,0
1,0
15,0
1000>
15,0
7,0
6,0
2,5
1,4
20,0
2.3. Pasif GKD Yöntemleri
ġebeke akımının dalga Ģeklini düzeltmenin en basit yolu, ġekil 2.3‟te gösterilen
temel AA/DA devresine her hangi bir devre elemanı ilave etmeden, Co çıkıĢ
kondansatörünün
değerini
düĢürmektir.
Co
çıkıĢ
kondansatörünün
değeri
düĢürüldüğü zaman çıkıĢ geriliminin dalgacık oranı artar ve dolayısıyla doğrultucu
diyotlarının iletim süresi artmıĢ olur. Bu çözüm yöntemi çıkıĢ geriliminin dalgacık
oranından etkilenmeyen yükler için kullanılabilir. Farklı çıkıĢ kondansatör
değerlerine sahip temel bir AA/DA devresinin giriĢ gerilim ve giriĢ akım dalga
18
Ģekilleri ile giriĢ akımının harmonik sonuçları ġekil 2.8, 2.9, 2.10 ve 2.11‟de
aktarılmıĢtır. Görüldüğü gibi, çıkıĢ kondansatörünün değeri düĢtükçe doğrultucu
diyotlarının iletim süresi artmakta ve giriĢ akımının tepe değeri düĢmektedir. ÇıkıĢ
kondansatörünün etkisini açık bir Ģekilde görebilmek için devrenin endüktansı ihmal
edilmiĢtir.
350
Vo
Co = 940µF
300
Co = 220µF
250
0.04
0.045
0.05
0.055
0.06
0.065
0.07
0.075
0.08
zaman (sn)
ġekil 2.8. Temel AA/DA devresinde farklı çıkıĢ kondansatör değerleri için çıkıĢ
gerilim dalga Ģekilleri (Vinrms = 220 V, Ro = 300 Ω)
300
Co = 940µF
Vin-10*Iin
200
100
0
-100
Co = 220µF
-200
-300
0.04
0.045
0.05
0.055
0.06
0.065
0.07
0.075
0.08
zaman (sn)
ġekil 2.9. Temel AA/DA devresinde farklı çıkıĢ kondansatör değerleri için giriĢ
gerilim ve 10*giriĢ akımı dalga Ģekilleri (Vinrms = 220 V, Ro = 300 Ω)
19
Temel bilesen (50Hz) = 2.273 , THB= 251.59%
Temel bilesenin %'si
100
80
60
40
20
0
0
2
4
6
8
10
12
Harmonik mertebesi
ġekil 2.10. Temel AA/DA devresinde Co = 940 µF değeri için giriĢ akımının
harmonik analizi (Vinrms = 220 V, Ro = 300 Ω)
Temel bilesen (50Hz) = 2.042 , THB= 167.07%
Temel bilesenin %'si
100
80
60
40
20
0
0
2
4
6
8
10
12
Harmonik mertebesi
ġekil 2.11. Temel AA/DA devresinde Co = 220 µF değeri için giriĢ akımının
harmonik analizi (Vinrms = 220 V, Ro = 300 Ω)
Yukarıda aktarılan sonuçlara bakıldığında, çıkıĢ kondansatörünün değeri azaltılarak
kayma faktörü, kθ arttırılabilir. Fakat bu yöntem hem çıkıĢ geriliminin dalgacık
oranını arttırmakta hem de bozulma faktörü, kd değerinin düzeltmemektedir.
Sonuçlardan da görüleceği üzere, yalnızca doğrultucu devre ve çıkıĢ kondansatörü
içeren temel AA/DA devresinin THB değeri oldukça yüksektir. Bu temel AA/DA
devresinin giriĢ akım harmoniklerini düzenlemek için ekstra pasif devre elemanları
içeren bazı pasif yöntemler geliĢtirilmiĢtir.
20
2.3.1. AA veya DA tarafına endüktör yerleĢtirilmiĢ pasif GKD devresi
Sadece doğrultucu ve çıkıĢ kondansatörü içeren temel AA/DA devresinin giriĢ güç
katsayısını yükseltmek için kullanılan en temel yöntemlerden biri, ġekil 2.12‟de
görüldüğü gibi devrenin AA Ģebeke tarafına veya doğrultucudan sonra olan DA
tarafına endüktör ilave edilmesidir [6].
L
Iin
Iin
L
Ro
Co
Vin
Co
Vin
Ro
ġekil 2.12. AA tarafına endüktör ilave edilmiĢ (solda) ve DA tarafına endüktör ilave
edilmiĢ (sağda) pasif GKD AA/DA devreleri
300
Vin-20*Iin
200
Vin
L=5mH
L=25mH
100
0
-100
-200
-300
0.16
0.165
0.17
0.175
0.18
0.185
0.19
0.195
0.2
zaman (sn)
ġekil 2.13. AA tarafına endüktör ilave edilmiĢ pasif GKD devresinin Vin-20*Iin dalga
Ģekilleri; (Vinrms = 220 V, Co = 220 µF, Ro = 300 Ω)
21
300
Vin
200
L = 200mH
Vin-50*Iin
100
L = 30mH
0
-100
-200
-300
0.46
0.465
0.47
0.475
0.48
0.485
zaman (sn)
0.49
0.495
0.5
ġekil 2.14. DA tarafına endüktör ilave edilmiĢ pasif GKD devresinin Vin-50*Iin dalga
Ģekilleri; (Vinrms = 220 V, Co = 220 µF, Ro = 300 Ω)
ġekil 2.13 ve 2.14‟te, temel devrenin AA Ģebeke tarafına veya doğrultucudan sonra
olan DA tarafına endüktör ilave edilmiĢ pasif devrelerin benzetim çalıĢmalarından
elde edilmiĢ giriĢ gerilim ve giriĢ akım dalga Ģekilleri aktarılmıĢtır. Sabit bir yük
akımı için DA tarafına yerleĢtirilen endüktör akımının sürekliliği fazla oldukça giriĢ
güç katsayısı değeri artar. Teorik olarak, endüktörün değeri sonsuz ise, endüktör
akımı sabit değerde kare Ģeklinde olur ve 0,9 değerinde güç katsayısı elde edilebilir
[6]. Bu nedenle, yüksek gk değeri elde edebilmek için yerleĢtirilen endüktörün de
değeri yüksek olmalıdır.
2.3.2. AA tarafına paralel rezonant süzgeç yerleĢtirilmiĢ pasif GKD devresi
ġekil 2.15‟te AA tarafına paralel rezonant süzgeç yerleĢtirilmiĢ pasif GKD AA/DA
devresi verilmiĢtir [6]. AA tarafına ilave edilen bu paralel süzgeç sadece 3. harmonik
mertebesini süzecek Ģekilde tasarlanır. Böylece, giriĢ akımının temel bileĢeninden
sonraki en büyük seviyeli harmonik akımı süzülmüĢ olur. Diğer harmonik akımları
süzülmediğinden Ģebeke akımında mevcutturlar. ġekil 2.16‟da ise bu devrenin
benzetim çalıĢmasından elde edilen giriĢ gerilim ve akım dalga Ģekilleri aktarılmıĢtır.
22
Iin
Lf
Ro
Co
Cf
Vin
ġekil 2.15. AA tarafına paralel rezonant süzgeç yerleĢtirilmiĢ pasif GKD AA/DA
devresi
300
Vin
200
50*Iin
Vin-50*Iin
100
0
-100
-200
-300
0.46
0.465
0.47
0.475
0.48
0.485
0.49
0.495
0.5
zaman (sn)
ġekil 2.16. AA tarafına paralel rezonant süzgeç yerleĢtirilmiĢ pasif GKD AA/DA
devresinin Vin-50*Iin dalga Ģekilleri; (Vinrms = 220 V, Co = 220 µF, Cf =
47 µF, Lf = 25 mH, Ro = 300 Ω)
2.3.3. DA tarafına LCD süzgeç yerleĢtirilmiĢ pasif GKD devresi
ġekil 2.17‟de DA tarafına LCD süzgeç yerleĢtirilmiĢ pasif GKD AA/DA devresi
verilmiĢtir [7]. DA tarafına ilave edilen bu süzgeç endüktör ve kondansatörün yanı
sıra fazladan bir adet diyot içermektedir. Bu devrenin en büyük avantajı süzgeç için
kullanılan elemanların değerlerinin düĢük olmasıdır. TS EN 61000-3-2 standartları
içerisinde sınıf D cihazları için kullanılabilen bir yöntemdir. Fakat, gün geçtikçe
standartlar güncellenmekte ve sınırlamalar artmaktadır. Bu nedenle, bu yöntem de
23
çoğu uygulama için yetersiz kalmaktadır. ġekil 2.18‟de ise bu devrenin benzetim
çalıĢmasından elde edilen giriĢ gerilim ve giriĢ akım dalga Ģekilleri aktarılmıĢtır.
D
L
Iin
Ro
Co
Vin
C
ġekil 2.17. DA tarafına LCD süzgeç yerleĢtirilmiĢ pasif GKD AA/DA devresi
300
Vin
200
50*Iin
Vin-50*Iin
100
0
-100
-200
-300
0.46
0.465
0.47
0.475
0.48
0.485
0.49
0.495
0.5
zaman (sn)
ġekil 2.18. DA tarafına LCD süzgeç yerleĢtirilmiĢ pasif GKD AA/DA devresinin Vin50*Iin dalga Ģekilleri; (Vinrms = 220 V, Co = 220 µF, C = 4.7 µF, L =10
mH, Ro = 300 Ω)
24
2.3.4. AA tarafına paralel harmonik süzgeç yerleĢtirilmiĢ pasif GKD devresi
Pasif GKD için sıklıkla kullanılan bu yöntemde, ġekil 2.19‟da gösterildiği gibi,
devrenin AA tarafına Ģebekeye paralel yerleĢtirilen birden çok seri süzgeç kullanılır
[8]. ġekil 2.20‟de ise bu devrenin benzetim çalıĢmasından elde edilen giriĢ gerilim ve
akım dalga Ģekilleri aktarılmıĢtır.
Iin
L
Vin
R3
R5
L3
L5
C3
C5
3. harm
Co
Ro
5. harm
ġekil 2.19. AA tarafına paralel harmonik süzgeç yerleĢtirilmiĢ pasif GKD devresi
ġekil 2.20. AA tarafına paralel harmonik süzgeç yerleĢtirilmiĢ pasif GKD devresinin
Vin-50*Iin dalga Ģekilleri; (Vinrms = 220 V, Co = 470 µF, L =400 mH, L3
= 220 mH, L5 = 100 mH, C3 = 5,6 µF, C5 = 4,04 µF, R3 = R5 = 0,1 Ω, Ro
= 300 Ω)
25
Her bir süzgeç belirli bir harmonik mertebesindeki akımın süzgeçlenmesi için
tasarlanır. Farklı mertebeli birden çok harmonik akımı olduğundan, her biri için ayrı
bir süzgeç gerekir. Bu olanaksız olduğundan, uygulamada genellikle en yüksek
mertebeli harmonik akımları (3. ve 5. harmonik akımları) için süzgeçler yapılır.
Devrenin toplam maliyetini ve boyutunu arttırdığından bir çok uygulamada tercih
edilmez.
2.3.5. Valley-fill doğrultuculu pasif GKD devresi
ġekil 2.21‟de gösterilen Valley-fill doğrultuculu pasif GKD AA/DA devresinin en
büyük dezavantajı, diğer devrelere göre çıkıĢ geriliminin dalgacık oranı oldukça
yüksektir. Bu yöntem genellikle aydınlatma devrelerinde kullanılır [7-8].
Co1
Iin
D3
Vin
Ro
D2
D1
Co1
ġekil 2.21. Valley-fill doğrultuculu pasif GKD devresi
AA/DA dönüĢtürücülerinde kullanılan pasif GKD yöntemlerinin basit olmaları,
güvenilir olmaları, gürültüden etkilenmemeleri, EMI
üretmemeleri ve anahtarlama
kayıplarına yol açmamaları en büyük avantajlarıdır. Diğer taraftan, GKD için pasif
yöntemlerin kullanılması, devreleri ağır ve büyük boyutlu yapar. ÇıkıĢ geriliminin
kontrol edilemeyiĢi ve dinamik tepkilerin ağır olması pasif yöntemlerin diğer önemli
dezavantajlarıdır. Bu nedenlerle, AA/DA dönüĢtürücülerde pasif GKD devrelerinin
kullanımı pek tercih edilmez.
26
2.4. Aktif GKD Yöntemleri
Pasif GKD yöntemlerin dezavantajlarından dolayı, aktif GKD yöntemlerinin AA/DA
dönüĢtürücülerde kullanımı oldukça yaygınlaĢmıĢtır. Aktif GKD yöntemleri, ġekil
2.22‟de gösterildiği gibi, temel güç elektroniği anahtarları ile yapılmakta ve mutlaka
kontrolcüye ihtiyaç duymaktadır. Bu yöntemler Ģebeke frekansı gibi düĢük
frekanslarda (50-60 Hz) yapılabildiği gibi (genellikle tristör kullanılarak), genellikle
yüksek frekanslarda (10-300 kHZ) yapılmaktadır (MOSFET, IGBT gibi güç
elektroniği anahtarları kullanılarak). AA/DA dönüĢtürücülerde çıkıĢ geriliminin
kontrol edilmesi aktif GKD yöntemlerin pasif yöntemlere göre en önemli
üstünlüğüdür. Ayrıca, aktif GKD yöntemlerinde yüksek frekanslara çıkıldıkça,
dönüĢtürücüde kullanılan endüktör ve kondansatör değerleri de düĢtüğü için daha
düĢük boyutlu devre elde edilebilir. ÇalıĢmanın bu bölümünde literatürde mevcut
yüksek frekanslı temel aktif GKD devreleri aktarılmaktadır [9-13].
EMI Süzgeç
Vin
GKD
Devresi
Co
Yük
(Rezistif)
(DA/DA)
(DA/AA)
GKD
Kontrolcü
ġekil 2.22. Aktif GKD yöntemi blok Ģeması
Yüksek frekanslı aktif GKD devresi, temel AA/DA devresindeki diyotlu doğrultucu
ile çıkıĢ kondansatörü arasına yükselten, düĢüren, düĢüren-yükselten tip temel
DA/DA devreleri veya bunlardan türetilen devrelerin ilave edilmesi ile elde edilir.
Ayrıca, temel AA/DA devresindeki diyotlu doğrultucu kullanılmadan, tüm
anahtarların kontrollü olduğu köprüsüz, yarım-köprü, tam-köprü gibi aktif GKD
devreleri de geliĢtirilmiĢtir. Tüm bu devrelerde, Ģebeke frekansından yüksek bir
anahtarlama frekansı ile giriĢ akımı kontrol edilmekte ve frekansı giriĢ gerilim
frekansının iki katı olan çıkıĢ gerilimi kontrolü de yapılmaktadır. ÇıkıĢ gerilimi,
27
kullanılan devreye bağlı olarak, giriĢ geriliminin tepe değerinden düĢük veya
yüksektir. DüĢüren tip devrede (Buck Converter) çıkıĢ gerilimi giriĢ gerilimin tepe
değerinden düĢük iken yükselten tip devrede (Boost Converter) çıkıĢ gerilimi giriĢ
gerilimin tepe değerinden yüksektir. DüĢüren-yükselten tip devrede (Buck-Boost
Converter) ise kontrolcüye bağlı olarak çıkıĢ gerilimi giriĢ gerilimin tepe değerinden
düĢük yada yüksek olabilmektedir. Aktif GKD devrelerinde kullanılan endüktörün
akım dalga Ģekli sürekli veya kesikli olabilir. Sürekli iletim modunda (SĠM),
endüktör akımı bir anahtarlama peryodu süresince sıfıra düĢmez. Kesikli iletim
modunda (KĠM) ise, endüktör akımı bir anahtarlama peryodu süresince sürekli
olmayıp kesintiye uğrar. Yukarıda bahsedilen temel aktif GKD devrelerin tümünde
endüktör akımı sürekli iletim modunda olsa bile, giriĢ akımı sadece yükselten tip
devrede sürekli iletim modunda olabilir. Çünkü, düĢüren ve düĢüren-yükselten tip
devrelerde giriĢ akımı devreye seri bağlanan anahtar ile her bir anahtarlama
peryodunda kesintiye uğramaktadır.
2.4.1. DüĢüren (buck) aktif GKD devresi
GiriĢ gerilimini düĢüren bu tip aktif GKD devresinin (ġekil 2.23) gerilim ve akım
dalga Ģekilleri ġekil 2.24‟de aktarılmıĢtır. DüĢüren devrede giriĢ gerilimi (Vin) çıkıĢ
geriliminden (Vo) yüksek olması gerektiğinden, giriĢ geriliminin düĢük olduğu
durumlarda (t1 ve t2 süresince) anahtarlama yapılmamakta ve giriĢ akımında
kesintiler oluĢmaktadır. Bu durum giriĢ geriliminin sıfıra yakın olduğu durumlarda
giriĢ akımında bozulmalar oluĢturmaktadır. DüĢüren tip devrede kullanılan endüktör
akımı sürekli olsa bile, giriĢ akımı her bir anahtarlama peryodunda kesintiye
uğradığından kesintili durumdadır. Bundan dolayı, düĢüren tip GKD devrelerinde
giriĢ akımının dalgacık oranı yüksek olup daha büyük oranda EMI üretilmiĢ olur.
Ayrıca, bu devrenin giriĢ akım dalga Ģekli kesintili olduğundan, anahtar akımının
tepe oranı yüksektir. Bu nedenle, bu devrede akım değeri daha yüksek anahtar ve
diyot kullanılır.
28
L
M
Iin
EMI Süzgeç
Vin
Vg
Y
Ü
K
Co
D
Vo
ġekil 2.23. DüĢüren tip aktif GKD devre Ģeması
Vin
π
0
2π t
Vo < Vin
Vg
Vo
t
0
Iin
t
0
t1
t2
t1
ġekil 2.24. DüĢüren tip aktif GKD devresinin gerilim ve akım dalga Ģekilleri
29
2.4.2. DüĢüren-yükselten (buck-boost) aktif GKD devresi
GiriĢ gerilimini düĢüren yada yükselten bu aktif GKD devresinin (ġekil 2.25) gerilim
ve akım dalga Ģekilleri ġekil 2.26‟da aktarılmıĢtır.
D
M
Iin
EMI Süzgeç
Vin
Vg
L
Co
Y
Ü
K
Vo
ġekil 2.25. DüĢüren-yükselten aktif GKD devre Ģeması
Vin
0
2π t
π
Vg
t
0
Vo < Vin
Vo > Vin
-Vo
Iin
0
t
ġekil 2.26. DüĢüren-yükselten aktif GKD devresinin gerilim ve akım dalga Ģekilleri
30
GiriĢ gerilimi çıkıĢ geriliminden yüksek veya düĢük olsa bile devre çalıĢmaktadır. Bu
nedenle, giriĢ geriliminin her hangi bir değerinde giriĢ akımında kesintiler
oluĢmamaktadır. Bu devrede de düĢüren tip devrede olduğu gibi, kullanılan endüktör
akımı sürekli olsa bile, giriĢ akımı her bir anahtarlama peryodunda kesintiye
uğramaktadır. GiriĢ akımının dalga Ģekli kesintili olduğundan, düĢüren tip devredeki
dezavantajlar bu devre için de geçerlidir. Ayrıca, düĢüren-yükselten GKD devresinin
çıkıĢ gerilimi giriĢ gerilimine göre negatif polaritede olduğundan anahtarlar
üzerindeki gerilim stresleri daha yüksektir.
2.4.3. Yükselten (boost) aktif GKD devresi
Güç katsayısı düzeltmede en çok kullanılan devre olan yükselten tip aktif GKD
devresinde (ġekil 2.27) çıkıĢ gerilimi her zaman giriĢ geriliminden yüksektir. ÇıkıĢ
gerilimi daima giriĢ geriliminden yüksek olduğundan, düĢüren tip GKD devresinde
meydana gelen giriĢ geriliminin sıfıra yakın noktalarındaki bozulma oluĢmamaktadır.
Yani, bu devrenin GKD kontrolünde, giriĢ geriliminin sıfır noktasından tepe
noktasına kadar devre anahtarlamalı olarak çalıĢtırılabilmektedir. Bu sayede, giriĢ
akım dalga Ģekli tamamen giriĢ gerilim dalga Ģekline dönüĢtürülebilir. Bu devrenin
diğer devrelere göre en büyük avantajı, ġekil 2.28‟de de görüldüğü gibi, giriĢ akımı
hem SĠM modunda hem de düĢüren tip GKD devresinde olduğu gibi KĠM modunda
olabilir. Ayrıca, uygun kontrolcü kullanılarak bu devrenin giriĢ akım dalga Ģeklinin
sınır iletim modunda da (SRM) olması sağlanabilir. Devrede kullanılan endüktör
devrenin giriĢinde olduğundan, endüktör akımı sürekli modda olduğu taktirde, giriĢ
akım dalga Ģekli de sürekli modda olabilmektedir.
L
Iin
Vin
D
EMI Süzgeç
Vg
M
ġekil 2.27. Yükselten aktif GKD devre Ģeması
Co
Y
Ü
K
Vo
31
Vin
0
Vg
π
2π t
Vo > Vin
t
0
Iin
0
t
ġekil 2.28. Yükselten aktif GKD devresinin gerilim ve akım dalga Ģekilleri
Özellikle ortalama akım kontrol yöntemi kullanılarak SĠM dalga Ģeklinde giriĢ
akımına sahip yükselten GKD devreleri bir çok uygulamada kullanılmaktadır [1415]. Yükselten aktif GKD devresinin endüktör akımının SĠM Ģeklinde olmasının en
önemli avantajı giriĢ akımının dalgacık oranının düĢük olmasıdır. Bu da, daha düĢük
akım değerlerine sahip devre elemanlarının kullanılması ve daha düĢük boyutlu EMI
süzgece ihtiyaç duyulması anlamına gelir.
Farklı bir kontrolcü kullanılarak, yükselten aktif GKD devresinin endüktör akımının
SRM Ģeklinde olması sağlanabilir (ġekil 2.29). Endüktör akımının Ģekli SRM olduğu
taktirde, devrenin giriĢinden çekilen akımın dalgacık oranının ortalama akım kontrol
yöntemi ile elde edilen SĠM dalga Ģekline sahip giriĢ akımının dalgacık oranından iki
kat daha yüksektir. Bu nedenle, SRM Ģeklinde giriĢ akımına sahip devrede daha
yüksek akım değerlerine sahip yarıiletken elemanlar ve daha büyük boyutlu EMI
32
süzgeç kullanılır. Bunun yanı sıra, giriĢ akım Ģekli SRM olan yükselten aktif GKD
devresinin anahtarlama frekansı sabit değildir. Anahtarlama frekansı, giriĢ
geriliminin düĢük olduğu noktalarda yüksek ve yüksek olduğu noktalarda ise
düĢüktür. Yarıiletken elemanların çalıĢma frekansları sınırlı olduğundan, giriĢ
gerilim dalga Ģeklinin sıfıra yakın olduğu noktalarda çok yüksek anahtarlama
frekansının olması devrede kullanılan yarıiletken elemanlar için önemli bir
handikaptır [16].
IL
Imax(SRM)
2I
SRM
Iort
t
0
Imax(SĠM)
SĠM
IL
I
0
t
ġekil 2.29. Yükselten aktif GKD devresinin endüktör akım Ģekilleri
Yukarıda aktarılan temel devrelerin yanı sıra bu devrelerden türetilmiĢ GKD
devreleri de mevcuttur. Flyback ve forward gibi içerisinde trafo barındıran
izolasyonlu GKD devreleri olduğu gibi, özellikle yükselten tip devreden türetilmiĢ ve
diyotlu doğrultucuya ihtiyaç duymayan köprüsüz, tam-köprü, yarım-köprü GKD
devreleri bunlardan bazılarıdır [17-20].
33
DüĢük boyutlu EMI süzgeç gereksinimi ve düĢük akım değerlerine sahip yarıiletken
elemanlarının kullanılmasından dolayı yükselten GKD devresi orta ve büyük güç
uygulamalarında (>100 W) en çok tercih edilen devredir [8]. Bu nedenle, ortalama
akım kontrol yöntemi kullanılarak SĠM endüktör akım dalga Ģekline sahip yükselten
GKD devresi üzerine yapılan çalıĢmalar literatürdeki güncelliğini uzun yıllardan beri
korumaktadır. Belirli bir güç değerinin üzerine çıkıldıkça yükselten GKD devresinde
kullanılan tek anahtarın nominal akım değerinin de artması gerekmektedir. Bilindiği
üzere, yarıiletken anahtarların taĢıyabileceği nominal akım değerleri arttıkça hem
fiyatları artmakta hem de ihtiyaç duydukları soğutucunun boyutu artmaktadır. Bu
nedenle, düĢük boyutlu devre üretimi için, yükselten GKD devrelerinde anahtarların
paralellenmesi oldukça yaygın kullanılan bir yöntemdir.
Bir çok uygulamada, düĢük boyutlu EMI süzgeç gereksinimi için, endüktör akımının
dalga Ģeklinin SĠM olması ve bu akımın dalgacık oranının oldukça düĢük olması
istenir. Bu nedenle, orta ve yüksek güç uygulamalarında, dönüĢtürücü gücünü
arttırmak ve giriĢ akım dalgacık oranını düĢürmek için sarmaĢık (faz farklı paralel)
yükselten GKD devreleri önerilmektedir [21-23]. Faz farklı paralelleme tekniği,
birden çok güç katının faz farklı olarak anahtarlamasıdır. Bu yöntemle giriĢ akım
dalgacık oranı düĢtüğü gibi, çıkıĢ gerilim dalgacık oranı da düĢmektedir. ġekil
2.30‟da aktarılan sarmaĢık yükselten GKD devresinin uygulamadaki kullanım
alanının geniĢliği ve diğer GKD devrelerine göre sahip olduğu avantajlardan dolayı
bu tez çalıĢmasının konusu olmuĢtur.
Iin
Vin
EMI Süzgeç
Vg
L2
D2
L1
D1
M1
M2
ġekil 2.30. SarmaĢık yükselten aktif GKD devresi
Co
Y
Ü
K
Vo
34
3. ORTALAMA AKIM YÖNTEMĠ ĠLE KONTROL EDĠLEN SARMAġIK
YÜKSELTEN GKD DEVRE ANALĠZĠ
Önceki bölümde aktarıldığı üzere, GKD uygulamaları için bir çok devre çeĢidi
kullanılmaktadır. Yükselten tip GKD devresi diğer devrelere göre bir çok avantaja
sahip olduğundan, uygulamada en çok tercih edilen devredir. Yükselten GKD
devresinin giriĢ akımı devrede kullanılan endüktörün akımı olduğundan, giriĢ
gerilimini takip eden sürekli iletim modunda akım dalga Ģeklinin elde edilebilmesi bu
devrenin en büyük avantajıdır. Sürekli iletim moduna sahip akımın dalgacık oranı
daha düĢük olmakta ve devrenin giriĢinde gereksinim duyulan EMI süzgecinin
boyutunu düĢürmektedir. Ayrıca, yükselten GKD devresinde kullanılan anahtarın
kaynak ucu devrenin ortak ucuna bağlı olduğundan, devre anahtarlaması için
kullanılan sürücü devre tasarımı basit ve kolaydır.
Yükselten GKD devresinin kontrolünde, ortalama akım kontrol yönteminin haricinde
„histerisiz akım kontrol yöntemi‟, „tepe akım kontrol yöntemi‟, „PWM (Pulse
Density Modulation) kontrol yöntemi‟ gibi farklı kontrol yöntemleri de
kullanılmaktadır. Literatürde geniĢ yer bulan bu yöntemlerin her biri farklı avantaj ve
dezavantajlara sahiptirler [24-27]. GKD uygulamalarında yarıiletken elemanlar
üzerindeki akım streslerinin az ve giriĢ akım dalgacık oranının düĢük olması arzu
edildiğinden, diğer kontrol yöntemlerine göre önemli üstünlükleri olan ortalama
akım kontrol yönteminin kullanımı oldukça yaygındır.
Orta ve yüksek güç uygulamalarında düĢük boyutlu ve yüksek güç yoğunluğuna
sahip GKD devrelerinin türetilmesi önemli bir çalıĢma konusu olmuĢtur. DüĢük
boyutlu ve yüksek güç yoğunluğuna sahip bir GKD devresi elde edilebilmenin temel
yöntemi giriĢte kullanılan EMI süzgecinin boyutunun düĢürülmesi ve devrede
yarıiletkenlerin soğutulması için kullanılan soğutucuların boyutunun düĢürülmesidir.
Bu nedenle, giriĢte daha düĢük boyutlu EMI süzgeç gereksinimi duyan ortalama
akım kontrollü yükselten GKD devresi önemli bir seçenektir. Fakat, yüksek güç
uygulamalarında klasik tek anahtarlı yükselten GKD devresinde kullanılan
yarıiletkenlerin nominal akım değerleri yüksek olduğundan, daha büyük boyutlu
35
soğutuculara ihtiyaç duyulmaktadır. Literatürde bu soruna çözüm için paralelleme
tekniklerinin geliĢtirildiği görülmektedir [23], [28]. Güç devrelerinin yanı sıra
yükselten devrede kullanılan yarıiletkenlerin paralellenmesi yöntemi ile daha düĢük
değerli anahtarlar kullanılmakta ve soğutucu boyutu düĢürülmektedir.
ÇalıĢmanın temelini ortalama akım yöntemi ile kontrol edilen sarmaĢık yükselten
GKD devresi oluĢturduğundan, bu bölümde yükselten ve sarmaĢık yükselten GKD
devrelerinin analazi ile birlikte ortalama akım kontrol yöntemi detaylı bir Ģekilde
irdelenmiĢtir.
3.1. Klasik Yükselten Devre Analizi
Ortalama akım kontrol yöntemi vasıtasıyla yükselten GKD devresinde kullanılan
endüktörde SĠM dalga Ģeklinin elde edildiği daha önce aktarılmıĢtı. Bu nedenle,
devre analizi SĠM akım dalga Ģekline göre yapılmıĢtır. ġekil 2.27‟de aktarılan
yükselten aktif GKD devresinin giriĢ gerilimini doğrultulmuĢ gerilim olarak alırsak,
Ģematik modeli ġekil 3.1‟deki gibi aktarılabilir.
ig
L
iL
D
VL
iCo
iM
Vg
VDS
VM
M
dTs Ts
Co
Io
Ro Vo
t
ġekil 3.1. Yükselten aktif GKD devresinin Ģematik gösterimi
Yükselten GKD devresi anahtar içeren aktif bir devre olduğundan, devrenin analizi
anahtarın açık ve kapalı olma durumuna göre incelenir. Devredeki aktif anahtarın
açık ve kapalı olma durumuna göre yükselten devreye ait eĢdeğer devre Ģekilleri
ġekil 3.2‟de ve gerilim-akım dalga Ģekilleri ise ġekil 3.3‟te aktarılmıĢtır.
36
iL
L
iL
VL
VL
iCo
Co
Ro
Vg
L
Vo
iCo
Co
Vg
(a)
Ro
Vo
(b)
ġekil 3.2. SĠM akım dalga Ģekline sahip yükselten devrenin eĢdeğer devreleri; (a) M
anahtarı kapalı (ON) iken, (b) M anahtarı açık (OFF) iken
VM
dTs
VL
Ts
Vg
Vg -Vo
ΔiL
iL
V Co
Vo
ΔVCo
ΔiL
iCo
Io
iM
iD
t
Ts
ġekil 3.3. SĠM durumunda yükselten devrenin gerilim-akım dalga Ģekilleri
Yükselten GKD devresinin giriĢ gerilimi doğrultulmuĢ Ģebeke gerilimi olup EĢ. 3.1
ile ifade edilir.
Vg (t )
Vin (t )
V1rms sin( t )
V1rms sin(2
f)
(3.1)
37
burada, f, Vin Ģebeke geriliminin frekansı olup 50 Hz değerindedir. Yükselten devrede
kullanılan bütün elemanların ideal olduğu düĢünülürse, anahtarın durumuna göre
aĢağıdaki eĢitlikler elde edilir.
M anahtarı kapalı konumda (ON) iken endüktör gerilimi ve kondansatör akımı,
Vg
VL
VL
L
iCo
(3.2)
iL
d Ts
(3.3)
Vo / Ro
(3.4)
eĢitlikleri ile ifade edilir. M anahtarı açık konumda (OFF) ise değerler,
VL
Vg
Vo
Vo
Vg
L
iCo
iL
(3.5)
iL
(1 d ) Ts
(Vo / Ro )
(3.6)
(3.7)
eĢitlikleri ile ifade edilir. Burada; ∆iL, endüktör akımının dalgacık miktarını; d, görev
çarpanını; Ts ise anahtarlama peryodunu ifade eder. M anahtarının her iki durumunda
da endüktör akımının dalgacık miktarı eĢit olacağından,
iL
V g d Ts
L
(Vo V g ) (1 d ) Ts
L
(3.8)
EĢ. 3.8‟den yükselten devreye ait giriĢ ve çıkıĢ gerilim iliĢkisi EĢ. 3.9 ile ifade edilir.
38
Vo
Vg
(3.9)
1 d
devrenin kayıpsız olduğunu düĢünürsek, giriĢ ve çıkıĢ akım iliĢkisi EĢ. 3.10 ile, giriĢ
akımının giriĢ gerilimi ve görev çarpanı cinsinden ise EĢ. 3.11 ile ifade edilir.
ig
iL
ig
iL
Io
1 d
(3.10)
Vg
(3.11)
(1 d ) 2 Ro
EĢ. 3.11‟den yararlanılarak elde edilen ġekil 3.4‟e bakıldığında, görev çarpanının
artması ile endüktör akımının ortalama değerinin arttığı görülmektedir.
iL/(Vg/Ro)
10
8
6
4
2
0
d
0
0.2
0.4
0.6
0.8
1
ġekil 3.4. Endüktör akım ortalama değerinin görev çarpanın ile değiĢimi
EĢ. 3.12‟ de verilen devrenin anahtarlama peryodunu kullanarak, EĢ. 3.8 ile ifade
edilen endüktör akımının dalgacık miktarı, görev çarpanı ve anahtarlama frekansı
cinsinden EĢ. 3.13 ile yeniden ifade edilebilir.
39
Ts
iL
1
fs
d Ts
(1 d ) Ts
Vg (Vo Vg )
f s L Vo
i L L Vo
Vg (Vo Vg )
(3.12)
Vg d
(3.13)
fs L
burada, fs anahtarlama frekansını ifade eder. ġekil 3.3‟den yararlanarak çıkıĢ
kondansatörünün gerilim değiĢimi EĢ. 3.14 ile ifade edilebilir. Kondansatör
üzerindeki gerilim aynı zamanda çıkıĢ gerilimidir.
Vc
1 Ts
iC dt
Co 0 o
Vo
I o (Vo Vg )
f s Co Vo
Io d
f s Co
(3.14)
Endüktör akımının sürekli iletim modu için gerekli olan endüktör ve kondansatörün
sınır değerleri, ∆iL=2iL ve ∆Vo=2Vo eĢitlikleri uygulanarak elde edilir. Bu durumda,
yukarıdaki denklemlerden yararlanarak, bu sınır değerler EĢ. 3.15 ve 3.16 ile ifade
edilir.
LSIM
C SIM
d (1 d ) 2 Ro
2 fs
d
2 f s Ro
(3.15)
(3.16)
Yukarıda aktarılan eĢitliklerden, çıkıĢ geriliminin görev çarpanının artmasıyla arttığı
görülmektedir. Endüktör akımı giriĢ akımı olduğundan her zaman çıkıĢ akımından
büyük olmaktadır. Endüktörü iç dirence sahip ideal olmayan bir eleman olarak
düĢünürsek, endüktör akımının artması bu iç dirençten dolayı kaybın artması ve
dolayısıyla devrenin veriminin düĢmesi anlamına gelir. Ayrıca, endüktör akımının
dalgacık miktarının endüktörün değeri ile ters orantılı olduğu görülmektedir.
40
Dalgacık oranının az olması endüktör akımının etkin değerini düĢürerek kayıpları
azaltır.
Yükselten GKD devrelerinin klasik DA-DA yükselten devrelere göre tek farkı, GKD
devrelerine uygulanan gerilim, ġekil 3.5‟te aktarıldığı gibi Ģebeke frekansı ile
sinüzoidal değiĢen doğrultulmuĢ gerilimdir. Bu nedenle, devrenin görev çarpanı (d)
bir peryot boyunca sürekli değiĢmektedir. Buna bağlı olarak SĠM sınırı için gerekli
endüktör değeri de değiĢiklik gösterir.
ġekil 3.5‟te yükselten GKD devrelerine
uygulanan gerilim, görev çarpanı ve SĠM sınırı için gerekli endüktör değerlerini
gösterir grafikler aktarılmıĢtır. (Grafikler; 220 V etkin giriĢ gerilimi, 390 V çıkıĢ
gerilimi, 50 kHz anahtarlama frekansı ve 300 W‟lık bir yükselten GKD devresi
düĢünülerek çizdirildi).
Vg
200
d
100
8
0.8
6
LSIM
300
1
0.6
0.4
0
2
4
6
t (sn)
8
10
x10-3
4
2
0.2
0
x10-4
0
2
4
6
t (sn)
8
10
x10-3
0
0.2
0.4
0.6
0.8
1
d
ġekil 3.5. Yükselten GKD devresine uygulanan gerilim, görev çarpanı (d) ve SĠM
için gerekli L değeri değiĢimleri
Klasik yükselten devrenin iL ve Vo değiĢkenleri için kararlı durum denklemleri
kullanılarak ortalama devre modeli aĢağıda aktarıldığı gibi elde edilebilir. M anahtarı
kapalı konumda (ON) iken endüktör akımının ve çıkıĢ geriliminin t zamanındaki
değiĢimleri (diL/dt ve dVo/dt),
diL
dt
dVo
dt
Vg
L
Vo
C o Ro
(3.17)
(3.18)
41
eĢitlikleri ile ifade edilir. M anahtarının açık konumundaki (OFF) değiĢimler ise,
Vg
diL
dt
Vo
(3.19)
L
dVo
dt
Vo
C o Ro
iL
Co
(3.20)
eĢitlikleri ile ifade edilir. Aktarılan bu değiĢimlere, X
A X
B U kararlı durum
denklemi uygulanırsa,
diL
dt
0
0
iL
1/ L
Vg
dVo
dt
diL
dt
0
1 /( Ro C o )
0
Vo
1/ L
M
1 / Co
1 /( Ro C o )
(3.21)
0
iL
1/ L
Vg
dVo
dt
ON
Vo
M
OFF
(3.22)
0
A
d A1 (1 d ) A2
(3.23)
B
d B1 (1 d ) B2
(3.24)
eĢitlikleri elde edilir. Burada, A1 ve B1 anahtarın kapalı olduğu durumdadaki, A2 ve
B2 ise açık olduğu durumdaki matrisleri ifade eder. Bu durumda, EĢ. 3.21 ve 3.22‟yi
ayrıĢtırırsak, A, A1, A2 ; B , B1, B2 ve U kararlı durum denklemlerindeki matrisler,
42
0
0
(3.25)
A1
0
1 /( Ro C o )
0
1/ L
(3.26)
A2
1 / Co
1 /( Ro C o )
0
(1 d ) / L
(3.27)
A
(1 d ) / C o
1 /( Ro C o )
1/ L
B
B1
(3.28)
B2
0
U
(3.29)
Vg
eĢitlikleri ile ifade edilir. Kararlı durum denklemi anahtarın her iki konumu
düĢünülerek yükselten devre değiĢkenlerine uygulanırsa,
diL
dt
0
(1 d ) / L
iL
1/ L
Vg
dVo
dt
(1 d ) / C o
1 /( Ro C o )
Vo
(3.30)
0
eĢitliği elde edilir. EĢ. 3.30 kullanılarak elde edilen yükselten devrenin ortalama
modeli ġekil 3.6‟da aktarılmıĢtır.
43
iL
L
Io
iCo
1-d : 1
..
Vg
Co
Ro
Vo
ġekil 3.6. Yükselten devrenin ortalama model gösterimi
3.2. SarmaĢık Yükselten Devre Analizi
Klasik tek anahtarlı yükselten güç elektroniği dönüĢtürücüsünün güç kapasitesi bir
kaç nedenden dolayı sınırlıdır. Bu nedenler; akım arttırıldıkça anahtarlama
elemanları üzerindeki akım stresleri artmaktadır, diyotların ters dönüĢüm akımları ve
oluĢan rezonant akımları elemanların nominal sınırlarını aĢacak düzeyde yüksek
olmaktadır. Akımın arttırılması ile yüksek ısınma ve doyum probleminin oluĢmaması
için
kullanılan
endüktörün
boyutunun
arttırılması
gerekir.
Aktarılan
bu
sınırlamalardan dolayı, klasik tek anahtarlı yükselten devrenin güç kapasitesinin
arttırılması için aĢağıda açıklanan paralelleme yöntemleri geliĢtirilmiĢtir.
Anahtar paralelleme;
Klasik yükselten dönüĢtürücüde kullanılan tek anahtarın yerine iki veya daha fazla
anahtarın paralellenerek kullanılması tercih edilen yöntemlerden biridir. Paralel
kullanılan anahtarların tümüne aynı tetikleme sinyali uygulanır. Bu yöntemde, sadece
anahtar akımının değeri bölüĢtürüldüğünden, kullanılan diyot ve endüktör ile ilgili
güç sınırlamaları devam etmektedir. Ayrıca, kullanılan anahtarların bazı üretim
farklılıklarından dolayı, akımın anahtarlar arasında eĢit bölüĢtürülememesi durumu
söz konusdur.
44
Dönüştürücü paralelleme;
Bazı uygulamalarda, birden çok klasik yükselten dönüĢtürücü modül halinde
tasarlanarak belli güç kapasitesini karĢılamak üzere birlikte kullanılırlar. Bu
yöntemin en büyük dezavantajı, pahalı ve boyutun büyük olmasıdır. Her bir modül
için ayrı soğutucu kullanılmaktadır. Bir önceki yöntemde olduğu gibi modüller arası
akımın eĢit paylaĢtırılması zordur. Ayrıca, bir modülün akımı diğer bir modülde
sirkülasyon yaparak istenmeyen durumlara yol açabilir [29].
Güç katı paralelleme;
Yükselten dönüĢtürücü güç katı yarı iletken anahtarlar ve endüktörden oluĢmaktadır.
ġekil 3.7‟de görüldüğü gibi N adet anahtar sayısına eĢit güç katlarına paralel olarak
bağlanır. Bu paralel güç katlarının anahtarlarına aynı tetikleme sinyalleri uygulanır.
GiriĢ akımı, paralel bağlanmıĢ güç katlarının çektiği akımın toplamına eĢittir. Bütün
anahtarlar aynı tetikleme sinyali ile anahtarlanır ve güç katları arası akımın eĢit
paylaĢtırılmasına yönelik ek kontrol devresi kullanılmaz. Bu yöntemde manyetik
malzeme olan endüktörler arası farklılıklar güç katları arası akımın eĢit
bölünmemesine yol açar. Diğer yöntemlere göre en önemli avantajı, birden çok
endüktör kullanıldığından büyük boyutlu endüktöre ihtiyaç duyulmaz. Çünkü toplam
enerji depolama ihtiyacı birden çok endüktör tarafından sağlanmaktadır. Bu avantaja
rağmen, giriĢ akımının dalgacık oranının yüksek olması, giderilmesi gereken önemli
bir sorundur.
Faz-Farklı güç katı paralelleme (Sarmaşık paralelleme);
Bir önceki yöntem pratik olsa da, dönüĢtürücü giriĢinden çekilen akımın dalgacık
oranına bir çözüm üretmemektedir. ġekil 3.8‟de görüldüğü gibi, her bir güç katındaki
anahtar faz-farklı tetiklenmek suretiyle, güç katlarının paralellenmesi bir önceki
yöntemin avantajlarını sağladığı gibi giriĢ akımının dalgacık oranını da
düĢürmektedir. GiriĢ akımı, paralel bağlanmıĢ güç katlarının çektiği akımın
45
toplamına
eĢittir.
Bütün
anahtarlar
faz-farklı
tetikleme
sinyalleri
ile
anahtarlandığından, her hangi bir veya birden çok güç katının akımı yükselirken,
diğer güç katı yada güç katlarının akımları düĢmektedir. Bu nedenle, güç katlarının
akımlarının toplamı olan giriĢ akımının dalgacık oranı düĢer. Bu yöntemde güç
katları arası akımın eĢit paylaĢtırılmasına yönelik ek kontrol devresi kullanılır. Teorik
olarak güç katı sayısında sınır olmasa da, pratikte çok sayıda güç katına sahip böyle
bir devrenin uygulaması oldukça zordur. Bu nedenle, pratikte iki veya üç güç katına
sahip faz-farklı yükselten devre uygulamaları tercih edilir.
iLN
ig
LN
DoN
Lk
Lk
Dok
iL1
L1
Do1
.i
.
iCo
M1 Mk MN
Co
Vg
Io
Vo
Ro
PWM
ġekil 3.7. N-adet güç katı paralel bağlanmıĢ yükselten devrenin gösterimi
iLN
ig
LN
DoN
Lk
Lk
Dok
iL1
L1
Do1
.i
.
io
iCo
M1
PWM1
Vg
PWMk
Io
Vo
Mk
MN
Co
Ro
PWMN
Faz-farklı
ġekil 3.8. N-adet güç katı paralel bağlanmıĢ sarmaĢık yükselten devrenin gösterimi
46
SarmaĢık yükselten devrenin her bir güç katı için uygulanan faz farkı, FF,
FF
k
2
N
(3.31)
eĢitliği ile ifade edilir. Burada k, sarmaĢık yükselten devrenin içerdiği güç katının
mertebesini ifade eder (k = 1,2,...N).
Ts
PWM1
t
PWM2
t
PWM3
t
120º
240º
iL2
iL3
iL1
∆iL1
t
ig
∆ig
t
τ
(NOFF+1)iLk
io
∆Qc
Io
(NOFF)iLk
t
τON τOFF
ġekil 3.9. 3-adet güç katı içeren sarmaĢık yükselten devrenin tetikleme sinyalleri ve
akım dalga Ģekilleri
47
ġekil 3.9‟da üç adet güç katı içeren sarmaĢık yükselten devrenin anahtar tetikleme
sinyalleri, endüktör akımları, giriĢ akım ve çıkıĢ akım Ģekilleri aktarılmıĢtır. ġekilden
de görüldüğü üzere, üç adet güç katı içeren sarmaĢık yükselten devrede, bir ile ikinci
katlar arası faz farkı 120° iken birinci ile üçüncü katlar arası faz farkı 240°
olmaktadır. Yani her bir güç katı bir öncekine göre 120° faz farkı ile
anahtarlanmaktadır.
N adet güç katı içeren sarmaĢık yükselten devrenin giriĢ akımı, çıkıĢ akımı ve ilgili
dalgacık oranlarının analizleri ġekil 3.9‟da aktarılan grafikler temel alınarak
yapılmıĢtır. Devrenin detaylı analizine [30] ve [31] numaralı kaynaklarından
ulaĢılabilir. Devrenin analizi yapılırken bütün elemanların ideal olduğu ve devrede
kullanılan endüktörlerin kuplaj bağlantısının olmadığı varsayılmıĢtır.
3.2.1. GiriĢ akımının dalgacık miktarı
SarmaĢık yükselten devrelerin giriĢ akımı bütün endüktör akımların toplamına eĢittir.
ġekil 3.9‟da görüldüğü gibi, sarmaĢık yükselten devrenin giriĢ akımının frekansı her
bir güç katının frekansından farklıdır. Her bir güç katının anahtarlama peryodu Ts,
olan N adet güç katı içeren sarmaĢık yükselten devrenin giriĢ akımının anahtarlama
peryodu, τ, EĢ. 3.32 ile ifade edilir.
Ts
N
(3.32)
Her bir giriĢ akımı peryodunda kapalı (ON) olan ve açık (OFF) olan anahtar sayısının
toplamından bir fazlası kadar güç katı vardır. Bir giriĢ akımı peryodunda sürekli
olarak kapalı olan anahtar sayısına NON, sürekli olarak açık olan anahtar sayısına
NOFF dersek, N adet güç katı EĢ. 3.33 ile ifade edilir [30].
N
NON
NOFF 1
(3.33)
48
SarmaĢık yükselten devrenin giriĢ akımının bir peryodundaki yükselen süreye τON
dersek, giriĢ akımı için tanımlanacak olan q görev çarpanı,
ON
q
(3.34)
eĢitliği ile ifade edilir. 3.32 ve 3.34 eĢitlikleri kullanılarak, giriĢ akımının görev
çarpanı her bir güç katının görev çarpanı (d) cinsinden EĢ. 3.35‟deki gibi ifade
edilebilir [30].
q
N d
1 q
(3.35)
NON
(3.36)
N (1 d ) NOFF
EĢ. 3.37‟ de verilen ve bütün endüktör akımlarının toplamı olan giriĢ akımının belli
bir zaman içerisindeki değiĢimi EĢ. 3.38 ile ifade edilir.
N
ig
dig
dt
i Lk
(3.37)
k 1
N
diLk
k 1 dt
(3.38)
Yükselten devre için elde edilen EĢ. 3.30‟daki endüktör akımının zamanla değiĢimi
kullanılarak, giriĢ gerilimi ve görev çarpanları cinsinden, giriĢ akımının değiĢimi EĢ.
3.39 ve giriĢ akımının dalgacık oranı ise EĢ. 3.40 ile ifade edilir.
dig
dt
N Vg
(1
L
N OFF
)
N (1 d )
V g (1 q )
L (1 d )
(3.39)
49
ig
V g (1 q )
L (1 d )
q
(3.40)
EĢ. 3.40 ile elde edilen giriĢ akımının dalgacık miktarını EĢ. 3.13 ile elde edilen
endüktör akımı dalgacık miktarına oranlarsak, ġekil 3.10‟da aktarılan grafikler elde
edilir [30].
1
Δig/ΔiLk
0.8
N=2
N=4
0.6
0.4
0.2
0
0
0.2
0.6
0.4
0.8
1
d
ġekil 3.10. SarmaĢık yükselten devrede, giriĢ akım dalgacık miktarının endüktör
akım dalgacık miktarına oranının görev çarpanına göre değiĢimi
ġekil 3.10‟dan, giriĢ akım dalgacık miktarının sarmaĢık yükselten devrede kullanılan
güç katı sayısına ve görev çarpanı değerine bağlı olarak değiĢtiği görülmektedir.
Devrede kullanılan paralel kolların sayısına bağlı olarak, belirli görev çarpanı
değerlerinde giriĢ akım dalgacık miktarı sıfır olmaktadır. Paralel kolların sayısı
arttıkça giriĢ akım dalgacık miktarı azalmaktadır.
3.2.2. ÇıkıĢ geriliminin dalgacık miktarı
SarmaĢık yükselten dönüĢtürücünün çıkıĢ akımı yük akımı ile çıkıĢ kondansatör
akımının toplamına eĢittir. ÇıkıĢ kondansatör değerinin çok büyük olduğu
düĢünülürse, ġekil 3.9‟da gösterildiği gibi, dönüĢtürücünün çıkıĢ akımının DA
50
bileĢeni yükten geçerken, AA bileĢenini kondansatör çeker. EĢ 3.41 ile verilen ġekil
3.9‟daki ∆QC alanı, çıkıĢta sabit akım sağlamak için kondansatörde biriken Ģarj
miktarını ifade eder.
Qc
(( NOFF 1) iLk
I o ) (1 q)
(3.41)
GiriĢ akımı N adet endüktörün akımının toplamına eĢit olduğundan, EĢ. 3.11
kullanılarak,
i Lk
ig
N
Io
N (1 d )
Vo
Ro N (1 d )
(3.42)
ifadesi elde edilir. 3.36 ve 3.42 eĢitlikleri EĢ. 3.41‟de kullanılırsa, ∆QC alanı EĢ. 3.43
ile yeniden düzenlenebilir [30].
Qc
Ts
Vo q (1 q)
N 2 Ro (1 d )
(3.43)
ġarj miktarı ile çıkıĢ gerilim dalgacık oranı arasındaki bağıntı EĢ. 3.44 ile verilmiĢtir.
Vo
Qc
Co
Ts
Vo
q (1 q )
N 2 Ro C o (1 d )
(3.44)
EĢ. 3.44 ile elde edilen çıkıĢ geriliminin dalgacık miktarını çıkıĢ gerilimine
oranlarsak, ġekil 3.11‟de aktarılan, görev çarpanına göre farklı paralel kolların
etkisini gösteren grafikler elde edilir. ġekil 3.11‟den, çıkıĢ gerilim dalgacık
miktarının çıkıĢ kondansatörüne, yüke ve her bir güç katının anahtarlama frekansına
bağlı olduğu görülmektedir. Ayrıca, devrede kullanılan paralel kol sayısı ve görev
çarpanı da çıkıĢ gerilim dalgacık miktarını doğrudan etkilemektedir. GiriĢ akım
dalgacık miktarında olduğu gibi, paralel kol sayısının artması çıkıĢ gerilim dalgacık
miktarını azaltmaktadır.
51
(ΔVo/Vo)*(RoCo/Ts)
1
0.8
N=1
0.6
0.4
N=2
N=4
0.2
0
0
0.2
0.6
0.4
0.8
1
d
ġekil 3.11. SarmaĢık yükselten devrede, çıkıĢ gerilim dalgacık miktarının çıkıĢ
gerilimine oranının görev çarpanına göre değiĢimi
Yukarıda aktarıldığı üzere, yükselten devrelerde faz farklı anahtarlama yönteminin
kullanılması hem giriĢ akım dalgacık miktarını hem de çıkıĢ gerilim dalgacık
miktarını düĢürmektedir. Bu yöntemle, dönüĢtürücü güç seviyesi arttırıldığı gibi daha
düĢük boyutlu EMI süzgece ihtiyaç duyulur.
3.2.3. Ġki kanallı sarmaĢık yükselten devrenin kararlı durum analizi
Yukarıda sarmaĢık yükselten dönüĢtürücünün giriĢ akım ve çıkıĢ gerilim dalgacık
miktarlarının analizi aktarıldı. Bu kısımda ise, sarmaĢık yükselten dönüĢtürücü
değiĢkenlerinin kararlı durum analizi yapılacaktır. SarmaĢık yükselten devrenin
kararlı durum analizi, ġekil 3.12‟de aktarılan SĠM endüktör akım dalga Ģekline sahip
iki kanallı devre için yapılmıĢtır.
EĢ. 3.1‟de verildiği gibi, yükselten GKD devrelerinin giriĢ gerilimi doğrultulmuĢ
Ģebeke gerilimi olup, Ģebeke frekansı ile sinüzoidal olarak değiĢir. Bu nedenle,
sarmaĢık yükselten devrenin çalıĢma durumları görev çarpanına (yani, giriĢ gerilimi
ile çıkıĢ gerilimi arasındaki iliĢkiye) bağlı olarak değiĢir. Görev çarpanına bağlı
olarak devrenin çalıĢma durumları Çizelge 3.1‟de aktarılmıĢtır.
52
ig
iL2
.i
L1
L2
Do2
L1
Do1
.
iCo
M1
Io
Vo
PWM1
Vg
Co
M2
Ro
PWM2
Faz-farklı
ġekil 3.12. Ġki kanallı sarmaĢık yükselten devre
Çizelge 3.1. SĠM akımına sahip iki fazlı sarmaĢık yükselten devre çalıĢma durumları
Ġletimdeki yarıiletkenler
ÇalıĢma Durumları
Vo/2 < Vg (d<0,5)
Vo/2 > Vg (d>0,5)
durum-1: d1Ts aralığında
M1, Do2 : ON
M1, D o2 : ON
durum-2: d2Ts aralığında
Do1, D o2 : ON
M1, M2 : ON
durum-3: d3Ts aralığında
M2, Do1 : ON
M2, Do1 : ON
durum-4: d4Ts aralığında
Do1, Do2 : ON
M1, M2 : ON
Çizelge 3.1‟de aktarılan d1, d2, d3 ve d4 ifadeleri, devrenin kararlı durum analizlerini
yapabilmek için, ġekil 3.13 ve 3.15‟te gösterildiği gibi, devrenin görev çarpanına (d)
bağlı bir anahtarlama peryodu süresince tanımlanmıĢ değiĢkenlerdir. Çizelge 3.1‟de
aktarıldığı gibi, görev çarpanına bağlı olarak (0,5‟ten büyük veya küçük olma
durumuna bağlı) devrenin çalıĢma durumları değiĢmektedir. Bu nedenle, devrenin
kararlı durum analizi iki farklı durum için ayrı ayrı yapılmıĢtır.
Vo/2 < Vg (d<0,5) durumu için (SİM);
Görev çarpanı 0,5‟ten küçük olduğu durumda, sarmaĢık yükselten devrenin SĠM
endüktör akım dalga Ģekilleri ġekil 3.13‟te ve çalıĢma durumlarına ait eĢdeğer
devreler ise ġekil 3.14‟te aktarılmıĢtır.
53
iL1
iL2
∆iL
d2Ts
d1Ts
d4Ts
t
d3Ts
Ts
ġekil 3.13. Ġki kanallı sarmaĢık yükselten devrenin endüktör akımlarının gösterimi
(180° faz farklı ; d < 0,5)
ig
iL2
.
L2
Do2
ig
Io
L1
Do1
iL1
iL2
.
M1
Ro
Co
M2
Vo
iL2
.
L2
Vg
ig
Io
Do1
iL1
M2
(c) durum-3
iCo
Ro
Co
M2
iL2
.
iL1
iCo
M1
Vg
Io
Vo
(b) durum-2
Do2
L1
Do1
.
M1
(a) durum-1
ig
Do2
L1
iL1
iCo
Vg
L2
Co
Ro
Vo
Vg
L2
Do2
L1
Do1
.
Io
iCo
M1
M2
Co
Ro
Vo
(d) durum-4
ġekil 3.14. Ġki kanallı sarmaĢık yükselten devrenin d<0,5 için çalıĢma durumları
Devrede kullanılan elemanlar ideal kabul edilerek, devrenin kararlı durum analizi
dört farklı durum için elde edilmiĢtir. Kararlı durum analizi klasik yükselten devrede
detaylı bir Ģekilde irdelendiğinden, bu kısımda sadece sarmaĢık yükselten devrenin
54
kararlı durum denklemleri aktarılacaktır. SarmaĢık yükselten devrenin kararlı durum
analizi ile ilgili geniĢ bilgi [32] ve [33] numaralı kaynaklarından edinilebilir.
SarmaĢık yükselten devrenin endüktör akımlarının ve çıkıĢ geriliminin t zamanındaki
değiĢimlerine (diL/dt ve dVo/dt) ait kararlı durum denklemleri d<0,5 için aĢağıda
aktarılmıĢtır. EĢitlikler elde edilirken ġekil 3.14‟teki ilgili eĢdeğer devrelerden ve
ġekil 3.13‟ten yararlanılmıĢtır.
durum-1; (d<0,5)
diL1
Vg
dt
L1
diL2
Vg
dt
L2
dVo
dt
i L2
(3.45)
Vo
L2
vo
Ro Co
Co
(3.46)
Io
Co
(3.47)
durum-2; (d<0,5)
diL1
Vg
dt
L1
diL2
Vg
dt
dVo
dt
Vo
L1
(3.48)
L2
Vo
L2
(3.49)
i L1
i L2
Co
Vo
Ro Co
Io
Co
(3.50)
55
durum-3; (d<0,5)
diL1
Vg
dt
L1
diL2
Vg
dt
L2
dVo
dt
i L1
Vo
L1
(3.51)
(3.52)
Vo
Ro Co
Co
Io
Co
(3.53)
durum-4; (d<0,5)
diL1
Vg
dt
L1
diL2
Vg
dt
dVo
dt
Vo
L1
(3.54)
L2
Vo
L2
(3.55)
i L1
i L2
Co
Vo
Ro Co
Io
Co
(3.56)
eĢitlikleri elde edilir. Devrenin her bir çalıĢma durumuna, X 1
X 2
A2 X
B2 U ; X 3
A3 X
B3 U ve X 4
A4 X
A1 X
B1 U ;
B4 U kararlı durum
denklemleri uygulandıktan sonra, durum matrisleri toplanarak X
A X
B U
genel ifadesi elde edilir. EĢ. 3.60 ve 3.61 ile verilen genel ifadeye ait matrisler elde
edilirken, 3.57, 3.58 ve 3.59 eĢitlikleri kullanılır.
A
A1d1
A2 d 2
A3 d 3
A4 d 4
(3.57)
56
B
B1d1 B2 d 2
1 d1 d 2
A
B
(3.58)
B4 d 4
(3.59)
d3 d 4
0
0
(1 d1 ) / C o
1 / L1
1 / L2
0
B3 d 3
0
0
(1 d 3 ) / C o
(1 d1 ) / L1
(1 d 3 ) / L2
1 / Ro C o
(3.60)
0
0
1 / Co
(3.61)
Kararlı durum genel denklemindeki değiĢken matrisi ve kaynak matrisi ise,
X
iL1
iL2
Vo
(3.62)
U
Vg
0
(3.63)
eĢitlikleri ile gösterilir. Burada her bir kolun (kanalın) görev çarpanını klasik
yükselten devrede olduğu gibi, d olarak alırsak; ġekil 3.13‟ten yararlanarak, d1
d2
0.5 d , d 3
d1, d 4
Kararlı durum denklemine
d 2 ve d1 d 2
X kd
d,
0.5 eĢitliklerin olduğu görülmektedir.
( A) 1 ( B) (U )
Ģeklinde ters dönüĢüm
uygulanırsa, sarmaĢık yükselten devre değiĢkenleri devre parametreleri cinsinden EĢ.
3.64 ile elde edilir.
57
Vg
i L1
X kd
( A) 1 ( B) (U )
i L2
Vo
2 Ro (1 d ) 2
Vg
(3.64)
2 Ro (1 d ) 2
2 RoV g (1 d )
2 Ro (1 d ) 2
EĢ. 3.64‟ten yararlanarak, devrenin giriĢ ve çıkıĢ gerilimleri arasındaki iliĢki EĢ. 3.65
ile aktarılmıĢtır.
Vo
Vg
2Ro (1 d )
2Ro (1 d )
1
2
(3.65)
(1 d )
Görüldüğü üzere, sarmaĢık yükselten devrenin giriĢ ve çıkıĢ gerilimleri arasındaki
eĢitlik (EĢ. 3.65) ile klasik tek anahtarlı yükselten devrenin giriĢ ve çıkıĢ gerilimleri
arasındaki eĢitlik (EĢ. 3.9) aynıdır.
Vo/2 > Vg (d>0,5) durumu için (SİM);
iL2
iL1
∆iL
d2Ts
d4Ts
t
d1Ts
d3Ts
Ts
ġekil 3.15. Ġki kanallı sarmaĢık yükselten devrenin endüktör akımlarının gösterimi
(180° faz farklı ; d > 0,5)
58
ig
iL2
.
L2
Do2
ig
Io
L1
Do1
iL1
iL2
.
M1
Io
L1
Vo
Vg
iL2
.
L2
ig
Io
Do1
iL1
iL2
.
M1
M2
Co
L2
Vo
Do2
Io
L1
Do1
iL1
iCo
Vg
Ro
Co
(b) durum-2
Do2
L1
iCo
M2
(a) durum-1
ig
Do1
M1
Ro
Co
M2
Do2
iL1
iCo
Vg
L2
iCo
M1
Ro
(c) durum-3
Vo
Vg
M2
Co
Ro
Vo
(d) durum-4
ġekil 3.16. Ġki kanallı sarmaĢık yükselten devrenin d > 0,5 için çalıĢma durumları
Görev çarpanı 0,5‟ten büyük olduğu durumda, sarmaĢık yükselten devrenin SĠM
endüktör akım dalga Ģekilleri ġekil 3.15‟te ve çalıĢma durumlarına ait eĢdeğer
devreler ise ġekil 3.16‟da aktarılmıĢtır. d>0,5 durumunda, sarmaĢık yükselten
devrenin endüktör akımlarının ve çıkıĢ geriliminin t zamanındaki değiĢimlerine ait
kararlı durum denklemleri, d<0,5 durumundaki yöntem uygulanarak elde edilir.
d>0,5 durumunda sarmaĢık yükselten devrenin kararlı durum denklemine ait
matrisler aĢağıda aktarılmıĢtır.
A
0
0
d 4 / Co
0
0
d 2 / Co
B
1 / L1
1 / L2
0
0
0
1 / Co
d 4 / L1
d 2 / L2
1 / Ro C o
(3.66)
(3.67)
59
d>0,5 durumunda kararlı durum genel denklemindeki değiĢken matrisi ve kaynak
matrisi bir önceki (d<0,5 durumunda) ile aynıdır. Yine aynı Ģekilde, ġekil 3.15‟ten
yararlanarak,
d1
d,
d2
0.5 d ,
d3
d1,
d4
d2
ve
d1 d 2
0.5
eĢitliklerinin olduğu görülmektedir.
3.3. Ortalama Akım Kontrol Yöntemi
GKD devrelerinde kullanılan kontrol yöntemlerinin temel amacı, dönüĢtürücüye
rezistif karakteristik sağlayarak, birim giriĢ güç katsayısı elde etmektir.
DönüĢtürücüye rezistif özellik sağlamak için giriĢ akımının giriĢ gerilimini takip
etmesi gerekir. Ortalama akım kontrol yöntemi, dönüĢtürücü akım kontrolünü
sağlayan ve GKD devrelerinde sık kullanılan yöntemlerden biridir. ġekil 3.17‟de
ortalama akım kontrol yönteminin sarmaĢık yükselten GKD devresine uygulanıĢı
aktarılmıĢtır.
Do2
L2
.
Iin
Vo
.
L1
EMI Süzgeç
Do1
M1
Vg
Vin
Co
M2
Ro
ig
VgM1
ön-besleme
döngüsü
Kg
Ki
VgM2
PWM
Ko
faz-farklı
Gi
ei
.
AGS
B
x2
C2
Vo,ref
ig,ref
(A*B)/C2
A
Gv
ev
ġekil 3.17. Ortalama akım kontrollü sarmaĢık yükselten GKD devresinin blok
gösterimi
60
ġekil 3.17‟de gösterilen ortalama akım kontrol yöntemindeki terimlerin açıklaması
aĢağıda verilmiĢtir.
Kg
: DoğrultulmuĢ giriĢ gerilim sensörü düĢürme katsayısı
Ki
: DoğrultulmuĢ giriĢ akım sensörü düĢürme katsayısı
Ko
: ÇıkıĢ gerilim sensörü düĢürme katsayısı
Gv
: Gerilim kontrolcüsü
Gi
: Akım kontrolcüsü
Vo,ref
: ÇıkıĢ gerilim referans değeri
ev
: Gerilim hata sinyali
ei
: Akım hata sinyali
ig,ref
: Akım referans sinyali
A
: Gerilim kontrolcüsü çıkıĢ sinyali
B
: Örneklenen doğrultulmuĢ giriĢ gerilim sinyali
C2
: Örneklenen ön-besleme gerilim sinyalinin karesi
AGS
: Alçak geçiren süzgeç
Ortalama akım kontrol yönteminde, gerilim kontrol döngüsü ve akım kontrol
döngüsü olmak üzere iki kontrol döngüsü mevcuttur. Gerilim kontrol döngüsü çıkıĢ
gerilimini kontrol ederek akım kontrol döngüsüne referans sinyali üretir. Akım
kontrol döngüsü ise doğrultulmuĢ giriĢ akımını kontrol ederek anahtarlama
sinyallerinin üretilmesini sağlar. ÇıkıĢ gerilimi ya dirençlerden oluĢan gerilim bölücü
devresi ya da gerilim örnekleme sensörü vasıtasıyla örneklenir ve çıkıĢ gerilim
referansı (Vo,ref) ile karĢılaĢtırılarak, çıkıĢ gerilim hata sinyali (ev) üretilir. Bu hata
sinyali, akım referans değerini (ig,ref) belirleyecek düzeyde, gerilim kontrolcüsü (Gv)
tarafından düzeltilir. Diyotlu doğrultucu çıkıĢ gerilimi (aynı zamanda sarmaĢık
yükselten devrenin giriĢ gerilimi) olan Vg gerilim değeri de çıkıĢ geriliminde olduğu
gibi örneklenir. Örneklenen bu gerilim sinyali akımın referans sinyalinin (ig,ref)
Ģeklini belirlemek için kullanılır. Gerilim kontrolcüsünden elde edilen kontrol çıkıĢ
sinyali (A) ile doğrultulmuĢ gerilim örneklemesinden elde edilen gerilim sinyali (B)
çarpılarak akımın referans sinyali (ig,ref) elde edilir. DoğrultulmuĢ akım değeri (ig) ya
61
bir direnç yada akım örnekleme sensörü vasıtasıyla örneklenir ve elde edilen akım
referans sinyali ile karĢılaĢtırılarak akım hata sinyali (ei) üretilir. Bu akım hata sinyali
akım kontrolcüsü (Gi) tarafından düzeltilir ve PWM bloğunda kullanılarak anahtarlar
için gerekli anahtarlama sinyalleri üretilir.
ġekil 3.17‟den, gerilim ve akım kontrol döngülerinin haricinde, bir ön-besleme
döngüsünün de olduğu görülmektedir. Bu ön besleme döngüsü, sabit çıkıĢ güç
değerinde, GKD devresinin giriĢ geriliminde meydana gelecek değiĢimlerden kontrol
parametrelerinin etkilenmemesi için kullanılır. Sabit güç değerinde, giriĢ
gerilimindeki artıĢ giriĢ akımının düĢmesine yol açar. Ortalama akım kontrol
yönteminde çarpım bloğu olduğundan, giriĢ gerilimindeki bu değiĢim akım değerini
düĢürürken, akım kontrol referans değerinin artmasına yol açar [34]. Gerilim
kontrolcüsü yeterince hızlı olmadığından, bu değiĢime kısa sürede cevap veremez.
Kontrol parametrelerindeki bu değiĢimden dolayı, çıkıĢa aktarılan güç artmıĢ olur.
Bu olumsuzluğu gidermek için ortalama akım kontrol yöntemine ön-besleme bloğu
ilave edilir. Ön-besleme bloğunun temelini, örneklenen doğrultulmuĢ gerilimin alçak
geçiren süzgeçten geçirilerek etkin değerine bağlı bir sinyalin elde edilmesi
oluĢturmaktadır. Sabit güç için, doğrultulmuĢ gerilimin etkin değerinin karesinin
çarpım bloğunun paydasına ilave edilmesi yeterlidir. Bu Ģekilde, giriĢ gerilimdeki
değiĢiklikler kontrol parametrelerini olumsuz etkilemez. Örneğin, giriĢ gerilimi iki
kat arttığı zaman giriĢ akımı iki kat azalır. GiriĢ akımı iki kat azalmıĢken, giriĢ
gerilimindeki bu artıĢ üretilen akım referans sinyalinin iki kat artmasına yol açar. Bu
nedenle, güçteki değiĢim dört kattır. GiriĢ gerilim ektin değerinin karesinin çarpım
bloğuna payda olarak eklenmesi bu güç değiĢimini gidermektedir [35].
Ortalama akım kontrol yönteminde, ġekil 3.18‟de görüldüğü gibi, üretilen akım
referans sinyaline bağlı olarak, akım kontrolcüsü dönüĢtürücü giriĢ akımının
ortalamasında düzeltme yapar. Bu nedenle, ortalama akım kontrol yönteminin GKD
devrelerinde kullanılan diğer kontrol yöntemlerine göre, aĢağıda aktarılan önemli
üstünlükleri mevcuttur.
62
GiriĢ akım dalga Ģeklinin giriĢ gerilimini takibinde yüksek doğruluk oranı elde
edilir.
Tepe akım kontrol yönteminde görev çarpanı 0,5‟ten büyük olduğu durumlarda
eğim kontrolü gerekirken, ortalama akım kontrol yönteminde buna gerek yoktur.
Gürültü hassasiyetinde ortalama akım kontrol yöntemi oldukça iyidir [24], [36].
Ortalama akım kontrol yöntemi SĠM dalga Ģeklinde endüktör akımı sağladığından,
giriĢ akım dalgacık oranı daha düĢüktür.
Ortalama akım kontrol yöntemi ile Ģebekeden daha düĢük etkin akım
çekilmektedir. Tepe akım kontrol ve PWM kontrol yöntemlerinde bu oran
yüksektir.
Ortalama akım kontrol yöntemi sabit anahtarlama frekansı ile çalıĢırken,
histerisiz akım kontrol yöntemi ve SRM kontrol yönteminde anahtarlama frekansı
değiĢkendir.
ig
ig
ig,max
ig,ort
t
ġekil 3.18. Ortalama akım kontrollü GKD devresinin doğrultulmuĢ akım dalga Ģekli
63
4. SIFIR-GERĠLĠM-GEÇĠġLĠ YUMUġAK ANAHTARLAMA YÖNTEMĠ
Daha önce aktarıldığı üzere, ulusal/uluslararası standartlardan dolayı kullanılması
kaçınılmaz olan, güç kalitesinin arttırılması için yük ile Ģebeke arasına ilave edilen
GKD devrelerinin küçük boyutlu olmasının yanı sıra verimli olmaları da önemli bir
çalıĢma konusu olmuĢtur. GKD devrelerinin küçük boyutlu olması istenildiğinden,
bu devrelerde kullanılan pasif elemanların boyutlarının küçük olması gerekir ve bu
nedenle, devrenin anahtarlama frekansı yükseltilir. GKD devrelerinde genellikle
IGBT (Insulated Gate Bipolar Transistor = yalıtılmıĢ kapı bipolar transistörü) güç
anahtarlarına göre daha yüksek frekanslarda çalıĢabilen MOSFET (Metal-Oxide
Semiconductor Field-Effect Transistor = metal oksit yarı-iletken alan etkili
transistör) güç anahtarları kullanılır. Fakat yüksek anahtarlama frekanslarına
çıkıldıkça da anahtar kayıpları artmakta ve dolayısıyla devrenin verimi düĢmektedir.
GKD devrelerinde verim arttırmak ve kullanılan aktif anahtarların ömrünü
yükseltmek için yumuĢak anahtarlama yöntemleri geliĢtirilmiĢtir. YumuĢak
anahtarlama yöntemleri anahtarlama kayıplarını azalttığı gibi EMI üretimini de
azaltmaktadır.
ÇalıĢmanın bu bölümünde, anahtar kayıplarının analizi yapıldıktan sonra yumuĢak
anahtarlama yöntemleri aktarılmıĢ ve tez konusunun bir parçası olan sıfır-gerilimgeçiĢli (SGG) yumuĢak anahtarlama yöntemi detaylı bir Ģekilde irdelenmiĢtir.
4.1. Anahtarlama Kayıpları
ÇalıĢmanın temelini oluĢturan yumuĢak anahtarlamanın önemini pekiĢtirmek için
sert anahtarlamalı devrelerde oluĢan anahtarlama kayıplarını analiz etmek gerekir.
Bu kısımda, GKD devrelerinde kullanılan MOSFET ve IGBT güç anahtarlarının yanı
sıra devrenin bir diğer yarıiletken elemanı olan güç diyodu kayıpları da incelenmiĢtir.
MOSFET ve IGBT anahtarlarını incelenmeden önce, ġekil 4.1‟de aktarılan, temel bir
M anahtarının bir anahtarlama peryodunda oluĢan gerilim, akım ve kayıplarını
gösteren grafiklerden yararlanarak kayıp analizi yapılmıĢtır.
64
VM
iM
Voff
ion
Von
kaçak akım
t
Ts
toff
ton
P
Anahtarlama
kayıpları
Pmax
t
ton/2
iletim kayıpları
toff/2
ġekil 4.1. Bir anahtarın, bir anahtarlama peryodundaki gerilim, akım ve kayıplarını
gösteren grafikler
ġekil 4.1‟de aktarılan ton süresi anahtarın açma (ON), toff süresi ise anahtarın kesim
(OFF) süresini ifade eder. Vm gerilimi ve im akımı taĢıyan M anahtarı üzerine düĢen
gerilim ve akım değerleri her bir süreçteki indisler ile ifade edilmiĢtir. P, gücü ifade
ederken, maximum güç için Pmax ifadesi kullanılmıĢtır. ġekil 4.1‟de verilen gerilim
ve akım dalga Ģekillerinin doğrusal değiĢtiği ve kaçak akımın olmadığı düĢünülürse,
bir anahtarlama peryodunda oluĢan kayıplar ve toplam kayıp ile ilgili eĢitlikler
aĢağıda aktarıldığı gibi ifade edilebilir [37].
Won
1
Voff ion t on
2
(4.1)
Woff
1
Voff ion t off
2
(4.2)
Wiletim
Von ion (Ts
t on t off )
(4.3)
65
burada, Won anahtarın açma (ON) süresinde harcanan enerjiyi, Woff anahtarın kesim
(OFF) süresinde harcanan enerjiyi ve Wiletim ise anahtarın iletim süresinde harcanan
enerjiyi ifade eder. Bir anahtarlama peryodunda oluĢan ortalama güç kaybını, Port
olarak ifade edersek,
Port
1
P(t ) dt
Ts
(Won Wiletim
Woff ) f s
(4.4)
eĢitliği elde edilir. Anahtarlama kayıplarına göre oldukça az olan iletim kayıplarını
ihmal edersek, Psw ile tanımlayacağımız anahtarlama kayıplarını,
Psw
Ts
1 t on
P(t ) dt
P(t ) dt
Ts 0
Ts t off
(Won Woff ) f s
(4.5)
eĢitliği ile ifade edebiliriz. DönüĢtürücülerde kullanılan aktif anahtarlara ait
kayıpların haricinde güç diyotlarının da kayıpları mevcuttur.
ġekil 4.2. Güç diyodu gerilim ve akım grafikleri
66
ġekil 4.2‟de verilen, VAK anot-katot gerilimine ve iD akımına sahip bir güç diyodunun
gerilim-akım grafiklerine bakıldığında, en büyük kaybın diyot kesim süresinde
oluĢtuğu görülmektedir. Ters kesim aralığı süresince diyot uçlarındaki gerilim
temelde sıfırdır, fakat diyot ters gerilimi henüz karĢılayabilecek durumda değildir.
Ters akımın tepe değeri ve dönüĢüm yükü (gölgeli kısımla gösterilmiĢ alan),
baĢlangıç akımı, sıcaklık ve kesim iĢlemi süresindeki akımın değiĢim oranı gibi bir
çok değiĢkene bağlıdır. Tepe değerinden sonra ters akımın değiĢim oranı tamamen
ani veya yavaĢ olabilir. 50-60 Hz iĢlemi için bu etki genel olarak ihmal edilebilir.
Ters akım değeri ve tersine dönüĢüm zaman değeri, bazı hızlı diyotlar için
belirlenebilir. ġekil 4.2‟deki grafikten aĢağıdaki eĢitlikler yazılabilir [38];
Qrr
diD
dt
I RM
t rr
(4.6)
0,5 I RM t rr
t1
(4.7)
2Qrr
diD / dt t1
(4.8)
EĢitliklerde, Qrr , ġekil 4.2‟deki gölgeli alanla gösterilen yük, IRM ters akımın tepe
değeri, trr tersine dönüĢüm zamanı ve t1 ve t2 ise trr zamanının alt bölümleridir.
Yukarıdaki eĢitlikler trr ve IRM değerlerini bulmak için kullanılabilir. t1
t2
t rr / 2 ,
alınırsa,
t rr
4Qrr
diD / dt
I RM
diD
Qrr
dt
0,5
(4.9)
0,5
(4.10)
67
eĢitlikleri yazılabilir.
Yukarıda anahtarlama kayıplarının analizi yapılırken temel bir aktif anahtar için
gerilim akım grafikleri ele alındı. Fakat, anahtar çeĢidine bağlı olarak anahtarlama
açma ve kesim grafikleri farklılık göstermektedir. Bu farklılıklar güç MOSFET‟leri
ve güç IGBT anahtarları için aĢağıda ayrı ayrı ele alınmıĢtır.
MOSFET; Sert anahtarlamalı klasik yükselten bir devrede kullanılan, gövde diyodu
içeren güç MOSFET anahtarının gösterimi ve eĢdeğer devresi ġekil 4.3‟te
verilmiĢtir. MOSFET anahtarında kullanılan ifadelerin açılımları; Gate (Kapı),
Source (Kaynak) ve Drain (Akaç) notasyonu Ģeklindedir [38].
L
iD
iL
VAK
iM
M
VM
Vg
D
VDS
Ro
Co
dTs Ts
D
iM
iM
ON
M iletir
Cgd
OFF
VDS
ON
Gövde diyodu iletir
Cds
G
VDS
Cgs
S
ġekil 4.3. Yükselten devrede kullanılan bir MOSFET‟in gövde diyodu dahil eĢdeğer
devresi ve gerilime göre iletim bölgeleri
Güç MOSFET‟inin statik karakteristikleri, güç elemanı ile ilgili akım ve gerilim
değerlerindeki artıĢ haricinde, küçük sinyal MOSFET‟lerine benzer. Tipik bir güç
68
MOSFET‟inde eĢik geriliminden daha az VGS değerleri için iM sıfırdır. VGS
geriliminin eĢik değerinden daha büyük değerleri için, MOSFET doğrusal bölgede
veya sabit direnç bölgesinde olabilir. MOSFET‟in iletim-kesim anahtarlamasında iki
kapasitör önemlidir. Bunlar kapı ile kaynak arasındaki Cgs ve kapı ile akaç arasındaki
Cgd
iç
kapasitörleridir.
Her
kapasitans,
gerilimin
doğrusal
olmayan
bir
fonksiyonudur. Bu değiĢimlerin ihmali, verilen çalıĢma Ģartlarını oluĢturmak için
gereken kapı yüklenmesinde bariz hata meydana getirir [38].
ġekil 4.4. Güç MOSFET‟inin açma-kapama sürelerindeki gerilim ve akım grafikleri
Güç MOSFET‟lerinde iç kapasitanslardan dolayı gerilim akım grafiği anahtarın açma
(ON) süresinde daha farklıdır. ġekil 4.4‟te aktarıldığı gibi, bu iç kapasitanslardan
dolayı anahtarlamanın açma süresinde oluĢan akımın tepe değeri daha yüksektir. Bu
nedenle, MOSFET anahtarlarında açma (ON) zamanındaki kayıpların giderilmesi
daha büyük önem arz eder.
IGBT; Gövde diyodu içeren güç IGBT anahtarının gösterimi ve eĢdeğer devresi ġekil
4.5‟te verilmiĢtir. BJT ve MOSFET‟in avantajlarını üzerinde taĢıyan IGBT,
MOSFET‟ler gibi yüksek giriĢ empedansı ve BJT‟ler gibi düĢük iletim kayıplarına
sahiptir. MOSFET gibi gerilim kontrollü eleman olan IGBT‟nin kapı sürmesinin
kolaylığı, tepe akım düĢüklüğü, sağlamlık gibi avantajları olmasına rağmen,
MOSFET‟lerin sahip olduğu yüksek anahtarlama frekansına sahip değildir.
MOSFET‟lerde bulunan iç kapasitanslar IGBT‟lerde olmadığından anahtarlamanın
açma (ON) süresinde oluĢan akımın tepe değeri yüksek değildir. Bu nedenle,
69
MOSFET anahtarlarında oluĢan açma (ON) zamanındaki yüksek kayıplar
IGBT‟lerde yoktur. Fakat, ġekil 4.6‟da aktarıldığı gibi, IGBT‟lerin kesim (OFF)
zamanında MOSFET‟lerde olmayan ikinci bir akım kuyruğu mevcuttur. Bu da,
IGBT anahtarlamasının kesim (OFF) zamanında ciddi kayıplara yol açmaktadır.
Bundan dolayı, IGBT anahtarlarında açma (ON) zamanındaki kayıplardan çok kesim
(OFF) zamanındaki kayıpların giderilmesi daha büyük önem arz eder.
C
iC
ON
IGBT iletir
VCE
iC
OFF
G
VCE
ON
Gövde diyodu iletir
E
ġekil 4.5. Gövde diyodu içeren IGBT anahtarının eĢdeğer devresi ve gerilime göre
iletim bölgeleri
ġekil 4.6. Güç IGBT anahtarının kesim (OFF) süresindeki gerilim ve akım grafikleri
Yukarıda aktarılan bilgilerden, MOSFET ve IGBT anahtarlarının karĢılaĢtırılması
yapılarak aĢağıda maddeler halinde özetlenmiĢtir.
70
IGBT anahtarlarının güç değerleri MOSFET‟lere göre yüksektir. Fakat, geliĢen
teknoloji ile birlikte son yıllarda yüksek güçlü MOSFET anahtarları
üretilmektedir.
IGBT‟lerin açma (ON) zamanındaki kayıpları ve iletim kayıpları MOSFET‟lere
göre düĢüktür. MOSFET‟lerin iç kapasitanslarından dolayı açma zamanındaki
tepe akım değeri yüksektir.
IGBT‟lerde kesim (OFF) zamanında meydana gelen ikinci akım kuyruğu
anahtarlama kesim (OFF) zamanında ciddi kayıplara yol açmaktadır. Bu durum
MOSFET‟lerde yoktur.
Anahtarlama hızı bakımından; MOSFET‟lerin anahtarlama frekansları IGBT‟lere
göre yüksektir.
4.2. Aktif YumuĢak Anahtarlama
Daha önce aktarıldığı üzere, farklı güç elektroniği uygulamalarında ön düzenleyici
olarak kullanılan GKD devrelerinin küçük boyutlu olması istenir. Küçük boyutlu bir
GKD devresi elde etmek için, genellikle MOSFET‟lerin yüksek anahtarlama
frekansından yararlanılır. GKD devrelerinin boyutunu düĢüren yüksek anahtarlama
frekansı ciddi anahtarlama kayıplarını da beraberinde getirir. Bu nedenle, GKD
devrelerinin verimini arttırmak için çeĢitli yumuĢak anahtarlama yöntemleri
geliĢtirilmiĢtir.
YumuĢak anahtarlama yöntemlerini pasif yumuĢak anahtarlama ve aktif yumuĢak
anahtarlama olarak iki guruba ayırabiliriz. Pasif yumuĢak anahtarlamada, temel devre
elemanlarının haricinde, yumuĢak anahtarlamayı sağlayacak yardımcı devrede
endüktör ve kondansatör gibi pasif devre elemanları bulunur. Bazı pasif yardımcı
devrelerde endüktör ve kondansatörün yanı sıra pasif yarıiletken olan diyotlar da
kullanılır. Pasif yumuĢak anahtarlama yöntemleri ile genellikle sıfır-akımanahtarlama (SAA) ve sıfır-gerilim-anahtarlama (SGA) yapılmaktadır. SAA,
anahtarın kesim (OFF) geçiĢi akımın sıfır olduğu durumda oluĢur ve genellikle IGBT
kuyruk akımından kaynaklanan anahtarlama kayıplarını elimine etmek için kullanılır.
71
SGA, anahtarın açma (ON) geçiĢi gerilimin sıfır olduğu durumda oluĢur ve
anahtarlarda depolanan gerilimden kaynaklı anahtarlama kayıplarını elimine etmek
için kullanılır. Literatürde mevcut pasif yumuĢak anahtarlama yöntemleri
incelendiğinde; pasif yardımcı devrelerin toplam devre boyutunu arttırdığı, devrede
kullanılan anahtarlar üzerinde ciddi gerilim ve akım stresleri oluĢturduğu ve devrenin
geniĢ güç aralığında iĢlevsel olmadığı görülmektedir. Örneğin, referans [39], [40] ve
[41]‟da yapılan çalıĢmalarda, pasif yumuĢak anahtarlama yöntemi kullanılarak
devredeki temel anahtarlar SGA ile anahtarlanmaktadır. Fakat, [39]‟da yumuĢak
anahtarlama için kullanılan yardımcı devre endüktörünün değeri oldukça yüksek
(temel devre endüktör değerinin yarısı oranında) olduğundan dönüĢtürücü boyutunun
ciddi oranda arttığı, [40]‟da ise yumuĢak anahtarlama yardımcı devresinde kullanılan
diyotların ters akımları yüksek olduğundan devredeki anahtarlar üzerinde ciddi
osilasyonlar oluĢturduğu görülmektedir. ġekil 4.7‟de aktarılan ve [41]‟de yapılan
çalıĢmada, yardımcı devrede kullanılan L ve C ile ana anahtarda SGA sağlanmasına
rağmen, anahtar normal durumda çekmesi gereken akımın yaklaĢık üç katı
büyüklükte akım çekmektedir. Bu da, daha yüksek güçte anahtar kullanılmasını
gerektirir. Pasif yumuĢak anahtalama yöntemlerinin bu dezavantajlarından dolayı,
aktif yumuĢak anahtarlama yöntemleri daha çok tercih edilmektedir.
L
D
Ls
Ca
Vg
Co
M
Ro
Cs
ġekil 4.7. Kaynak [41]‟de aktarılan SGA pasif yumuĢak anahtarlamalı yükselten
devre
Aktif yumuĢak anahtarlamada, ġekil 4.8‟de yükselten devrede görüldüğü gibi, temel
devre elemanlarının haricinde, yumuĢak anahtarlamayı sağlayacak yardımcı bir devre
kullanılır. Bu yardımcı devrede, bir veya birden çok aktif anahtarın yanı sıra
endüktör ve kondansatör gibi pasif devre elemanları da bulunur. YumuĢak
72
anahtarlamayı yardımcı devrede kullanılan aktif anahtarlar sağladığından, aktif
yardımcı devrelerde kullanılan endüktör ve/veya kondansatör değerleri oldukça
küçüktür. Dolayısıyla, aktif yardımcı devreler pasif yardımcı devreler gibi
dönüĢtürücü boyutunu arttırmazlar. Aktif yumuĢak anahtarlama yöntemlerinin en
önemli dezavantajı, yardımcı devre aktif anahtar veya anahtarlar içerdiğinden, ekstra
bir kontrol devresine ve anahtar sürücüsüne ihtiyaç duymalarıdır. Bu nedenle,
dönüĢtürücünün maliyetinin artmaması ve kontrol devresinin az karmaĢık olması,
aktif yumuĢak anahtarlama yöntemlerinde dikkat edilecek önemli konulardır.
L
D
iL
Io
3
1
Vg
M
Yardımcı
devre
Co
Ro Vo
2
ġekil 4.8. Aktif yumuĢak anahtarlamalı yükselten dönüĢtürücü genel görünümü
Aktif yumuĢak anahtarlama yöntemleri ile SAA ve SGA‟nın yanı sıra, sıfır-akımgeçiĢli (SAG) ve sıfır-gerilim-geçiĢli (SGG) anahtarlama yapılmaktadır. SAG
yönteminde, anahtarın kesim (OFF) geçiĢi sırasında anahtarın gövde diyodundan ters
akım geçirilerek anahtarlama yapılır. Genellikle IGBT için kullanılan bu yöntem,
IGBT kuyruk akımından kaynaklanan anahtarlama kayıplarının elimine edilmesini
sağlar. SGG‟de ise, anahtarın açma (ON) geçiĢi sırasında, gerilim sıfır olana kadar
anahtarın gövde diyodundan ters akım geçirilerek anahtarlama yapılır. Genellikle
MOSFET için kullanılan bu yöntem, anahtarın açma (ON) sürecinde oluĢan kayıpları
elimine etmek için kullanılır. Daha önce aktarıldığı gibi, MOSFET‟ler yüksek
anahtarlama frekansı gibi önemli bir avantaja sahip olmalarına rağmen, açma (ON)
sürecindeki anahtarlama kayıpları devrelerde önemli verim düĢüklüğüne yol
açmaktadır. Bu nedenle, SGG yumuĢak anahtarlama yöntemi kullanılarak
MOSFET‟lerdeki anahtarlama kayıpları önemli ölçüde düĢürülmektedir.
73
Yapılan literatür araĢtırmasında, güç elektroniği dönüĢtürücülerinde kullanılan bir
çok aktif yumuĢak anahtarlama yönteminin geliĢtirildiği görülmektedir. Bu
çalıĢmaların çoğu DA/DA dönüĢtürücülere uygulanmıĢtır [42-45]. GKD devrelerinin
giriĢ gerilimi sinüzoidal olduğu için (dolayısıyla görev çarpanı zamanla
değiĢmektedir) yumuĢak anahtarlama yöntemi uygulamak DA/DA dönüĢtürücülere
göre daha zordur. Literatürde mevcut aktif yumuĢak anahtarlama yöntemlerinden,
yükselten DA/DA ve yükselten GKD devrelerine uygulanan bazı çalıĢmalar
incelendiğinde bir takım eksiklikler olduğu gözlenmiĢtir. Örneğin, yükselten DA/DA
dönüĢtürücüde
kullanılan
en
temel
çalıĢmalar
incelendiğinde
[43-45],
dönüĢtürücülerde her hangi bir akım veya gerilim stresi oluĢmadan ana anahtarlar
yumuĢak anahtarlanmaktadır. Fakat, yardımcı devrelerde kullanılan aktif anahtarların
halen sert anahtarlanması bu devrelerin en büyük dezavantajıdır. Ayrıca [44]‟deki
çalıĢmada (ġekil 4.9) kullanılan yardımcı devre anahtarının kaynak ucunun ortak
noktaya bağlı olmaması, sürücü devresi tasarımını zorlaĢtırır ve karmaĢıklık yaratır.
[46-47] nolu çalıĢmalarda kullanılan aktif yardımcı devrelerin birden fazla yardımcı
anahtar içermeleri, dönüĢtürücülerin maliyetini arttırmakta ve kontrol devresini
karmaĢık hale getirmektedir.
L
L1
D
L2
D
Ma
Vg
M
Cr
Lr
Ma
(a)
Cr
Vg
Co
Ro
M
Co
Ro
(b)
ġekil 4.9. Kaynak [43] ve [44]‟te aktarılan aktif yumuĢak anahtarlamalı yükselten
devreler
Yardımcı devresinde tek anahtar içermesine rağmen, birden fazla endüktör içeren
çalıĢmalar da [48-50] mevcut. ġekil 4.10‟da aktarıldığı gibi, bu devrelerin birden çok
yardımcı endüktör içermesi dönüĢtürücünün toplam boyutunu arttırmaktadır.
74
C2
L
D
C1
L1
M
Vg
L2
Co
Ro
Ma
ġekil 4.10. Kaynak [48]‟de aktarılan aktif yumuĢak anahtarlamalı yükselten devre
Yukarıda aktarıldığı gibi, literatürde yükselten tip devreye uygulanan bir çok aktif
yumuĢak anahtarlama yöntemi olmasına rağmen, sarmaĢık yükselten devreye aktif
yumuĢak anahtarlama uygulayan çok az çalıĢma mevcuttur. [51-52]‟de aktarılan
çalıĢmalar (ġekil 4.11) son yıllarda yapılmıĢ temel çalıĢmalardır. Bu çalıĢmalarda
kullanılan aktif yardımcı devreler vasıtasıyla sarmaĢık yükselten dönüĢtürücünün ana
anahtarları
yumuĢak
anahtarlanmakta
ve
ana
anahtarlara
ait
kayıplar
düĢürülmektedir. Fakat, yardımcı devreye ait anahtarların kayıplarının devam etmesi,
yardımcı devrede birden çok aktif anahtarın kullanılması bu çalıĢmaların
dezavantajlarıdır.
.
L2
Do2
L1
Do1
.
.
L2
Do2
L1
Do1
C1
Co
Vg
S1
Ro
Lr2
C2
C2
S2
Lr1
C1
S1
.
Vg
Co
Ro
S4
(a)
(b)
ġekil 4.11. Kaynak [51] ve [52]‟de aktarılan, sarmaĢık yükselten devreye uygulanan
aktif yumuĢak anahtarlama yöntemleri
75
4.3. SarmaĢık Yükselten Devre Ġçin SGG YumuĢak Anahtarlama Yöntemi
Doğrusal olmayan yükler için ön düzenleyici olarak kullanılan sarmaĢık yükselten
GKD devre tasarımı bu çalıĢmanın temelini oluĢturmaktadır. Ön düzenleyici GKD
devrelerinin küçük boyutlu olması istendiğinden, yüksek anahtarlama frekansına
sahip MOSFET‟lerin kullanılması oldukça yaygındır. MOSFET‟ler yüksek
anahtarlama frekansı gibi önemli bir avantaja sahip olmalarına rağmen, açma (ON)
sürecindeki anahtarlama kayıpları devrelerde önemli verim düĢüklüğüne yol
açmaktadır. Yukarıda aktarılan yumuĢak anahtarlama yöntemleri ile ilgili literatür
araĢtırmasından sonra, SGG yumuĢak anahtarlama yöntemi ile MOSFET‟lerin açma
(ON) zamanındaki anahtarlama kayıplarının elimine edilmesi dönüĢtürücülere
önemli bir avantaj sağladığı görülmüĢtür. Ayrıca, literatürde yükselten tip devreye
uygulanan bir çok aktif yumuĢak anahtarlama yöntemi olmasına rağmen, özellikle
orta ve yüksek güç uygulamalarında tercih edilen sarmaĢık yükselten devreye aktif
yumuĢak anahtarlama uygulayan çok az çalıĢma olduğu görülmüĢtür. Bu nedenle,
sonraki bölümde analizi aktarılan, sarmaĢık yükselten GKD devresi için yeni bir
SGG yumuĢak anahtarlama yardımcı devre tasarımı bu tez çalıĢmasının konusu
olmuĢtur.
Ts
VGSM
d
VGSMa
VDSM
Vo
iM
SGG
ġekil 4.12. SGG yumuĢak anahtarlamada kullanılan tetikleme sinyalleri
SGG yumuĢak anahtarlama yönteminde, ġekil 4.12‟de görüldüğü gibi, MOSFET‟in
açma (ON) geçiĢi sırasında, gerilim sıfır olana kadar anahtarın gövde diyodundan
76
ters akım geçirilerek anahtarlama yapılır. Bu Ģekilde, MOSFET‟lerde en çok
anahtarlama kaybının oluĢtuğu anahtarın açma (ON) sürecindeki kayıplar elimine
edilmiĢ olur. ġekil 4.12‟de verilen VGSM ve VGSMa sırasıyla ana anahtar ve yardımcı
anahtar tetikleme sinyallerini, VDSM ve iM ise M ana anahtarının gerilim ve akım
ifadeleridir.
SGG için kullanılan yardımcı devreler aktif anahtarın yanı sıra içerdiği pasif devre
elemanlarına göre sınıflandırılabilir [53]. ġekil 4.13‟te aktarılan yardımcı devre
örnekleri aktif anahtarın haricinde sadece endüktör içerdiğinden rezonant olmayan
devre olarak adlandırılırken, ġekil 4.14‟te aktarılan yardımcı devre örnekleri aktif
anahtarın haricinde endüktör ve kondansatör içerdiğinden rezonant devre olarak
adlandırılır. ġekil 4.15‟te aktarılan yardımcı devre örnekleri ise rezonant olmayan ve
rezonant yardımcı devrelerden türetildiklerinden ikili devre olarak adlandırılırlar.
ġekil 4.13. Rezonant olmayan SGG yumuĢak anahtarlama yardımcı devre örnekleri
ġekil 4.14. Rezonant SGG yumuĢak anahtarlama yardımcı devre örnekleri
77
ġekil 4.15. Ġkili SGG yumuĢak anahtarlama yardımcı devre örnekleri
Yukarıda verilen SGG yardımcı devre örneklerinin her biri bir adet ana anahtar için
kullanılmaktadır. Bu yardımcı devreler genellikle yükselten devreye uygulanmıĢtır.
Bu yardımcı devreler incelendikten sonra, ġekil 4.16‟da aktarılan, sarmaĢık
yükselten GKD devresi için uygun yeni bir SGG aktif yardımcı devre türetilmiĢtir.
Cr
1
3
3
1
Aktif
Yardımcı
Devre
Lr
Cs
2
Ma
2
ġekil 4.16. SarmaĢık yükselten GKD devresi için önerilen SGG aktif yardımcı devre
ġekil 4.16‟da verilen ve sarmaĢık yükselten GKD devresi için önerilen SGG aktif
yardımcı devresi türetilirken aĢağıda aktarılan kriterler dikkate alınmıĢtır.
Küçük boyutlu GKD devresi için anahtarlama frekansları yüksek MOSFET‟lerin
kullanımı daha uygundur.
MOSFET‟lerin iç kapasitanslarından dolayı açma zamanındaki tepe akım değeri
yüksek olduğundan açma (ON) zamanında oluĢan kayıpları yüksektir.
78
Aktif yumuĢak anahtarlama yöntemleri pasif yumuĢak anahtarlama yöntemlerinin
sahip olduğu dezavantajları gidermektedir. Bu nedenle, tasarlanacak devrede aktif
yumuĢak anahtarlama yönteminin kullanılması daha uygundur.
SGG aktif yumuĢak anahtarlama yönteminde, anahtarın açma (ON) geçiĢi
sırasında gerilim sıfır olana kadar anahtarın gövde diyodundan ters akım
geçirilerek anahtarlama yapılır. Bu nedenle, MOSFET‟lerde en yüksek kayıpların
olduğu açma (ON) sürecindeki kayıpları elimine etmek için en uygun yöntem
SGG‟dir.
GKD devrelerinin küçük boyutlu olması önemli olduğundan, tasarlanacak
yardımcı devrenin de küçük boyutlu olması gerekir. Dolayısıyla, tasarlanacak
yardımcı devrede kullanılacak pasif elemanlar (özellikle endüktör) az sayıda ve
küçük boyutlu olmalıdır.
SarmaĢık yükselten GKD devresi birden çok güç katı içermekte ve bu güç katları
faz farklı anahtarlandığından kontrolü klasik yükselten devreye göre zordur. Bu
nedenle, tasarlanacak yardımcı devrenin kontrol devresini daha da karmaĢık hale
getirmemesi gerekir. Yardımcı devre sadece bir aktif anahtar içerirse, hem
dönüĢtürücünün maliyeti artmamıĢ olur hem de kontrol devresi daha basit olur.
SarmaĢık yükselten GKD devresinin giriĢ gerilimi zamanla değiĢen sinüzoidal
gerilim olduğundan, devrenin görev çarpanı da zamanla değiĢmektedir. Ayrıca,
devreden geçen akımın da değeri değiĢmektedir. Bu nedenle, tasarlanacak
yardımcı devre en olumsuz Ģartlarda bile SGG koĢulunu sağlaması gerekir.
Bu kriterler ıĢığında, yukarıda aktarılan SGG yardımcı devre örnekleri detaylı bir
Ģekilde analiz edildi ve sarmaĢık yükselten devre için ġekil 4.16‟da verilen SGG aktif
yardımcı devre geliĢtirildi. SarmaĢık yükselten GKD devresi için önerilen bu
yardımcı devrenin literatürde mevcut sarmaĢık yükselten devrelere uygulanmıĢ
yardımcı devrelere göre önemli özellikleri aĢağıda maddeler halinde özetlenmiĢtir.
SarmaĢık yükselten GKD dönüĢtürücüsündeki birden çok ana anahtar için
yalnızca bir yardımcı anahtarın kullanılması hem dönüĢtürücünün maliyetini
arttırmamakta hem de kontrol devresinin daha az karmaĢık olmasını
sağlamaktadır.
79
Önerilen yardımcı devrede kullanılan pasif elemanların sayısının az (özellikle
endüktörün) olması ve değerlerinin oldukça düĢük olması dönüĢtürücünün
boyutunu arttırmamaktadır.
SarmaĢık yükselten GKD devresindeki ana anahtarlar SGG ile anahtarlandığı gibi,
yardımcı devre anahtarı da hem açma hem de kesim zamanında yumuĢak
anahtarlama ile anahtarlanmaktadır. Bu da, devrenin verimini daha çok yükseltir.
Önerilen yardımcı devre ile hem ana anahtarlar üzerinde hem de yardımcı devre
elemanları üzerinde her hangi bir gerilim veya akım stresi oluĢmamaktadır.
Önerilen yardımcı devredeki pasif yarıiletken elemanlar (diyotlar) üzerinde
devrenin verimini etkileyecek kayıplar oluĢmamaktadır.
Önerilen yardımcı devre sarmaĢık yükselten GKD devresinin en olumsuz
koĢulları düĢünülerek tasarlandığı için, giriĢ geriliminin ve akımının bütün
değiĢimlerinde etkinliğini korumaktadır.
Önerilen SGG yardımcı devresinin sarmaĢık yükselten GKD devresine uygulanıĢı ve
tüm devre analizi bir sonraki bölümde detaylı bir Ģekilde ele alınmıĢtır.
80
5. ÖNERĠLEN SGG SARMAġIK YÜKSELTEN GKD DEVRESĠNĠN
ANALĠZĠ VE TASARIMI
Bu bölümde, tez çalıĢması kapsamında önerilen SGG sarmaĢık yükselten GKD
devresinin (ġekil 5.1) analizi yapıldıktan yapıldıktan sonra, ortalama akım kontrollü
tüm devrenin tasarım kriterleri aktarılmıĢtır. Önerilen devrenin endüktör akım dalga
Ģekilleri SĠM olduğundan, bütün analiz ve tasarım buna göre yapılmıĢtır.
L2
Do2
L1
Do1
.
.
Iin
Vin
D1
Cr
EMI Süzgeç
D2
Vg
M1
M2
Lr
Cs
D3
Vo
.
D4
Co
Ro
Ma
ig
VgM1 VgM2 VgMa
Kg
Ki
Ko
Sürücü
devresi
PWM1
PWM2
PWMa
faz-farklı
PWM
Gi
ei
.
AGS
B
2
x
C2
Vo,ref
ig,ref
(A*B)/C2
A
Gv
ev
GKD Kontrolcü
TMS320F2812 eZdsp
ġekil 5.1. Önerilen ortalama akım kontrollü SGG sarmaĢık yükselten GKD devresi
81
5.1. Önerilen Devrenin Durum Analizleri
Önerilen devrenin durum analizinde; çıkıĢ kondansatörü (Co) yüksek bir değere sahip
olduğundan, devrenin çıkıĢı sabit bir gerilim kaynağı olarak alındı. Devrede
kullanılan endüktörlerin değerleri yeterince büyük olduğundan, akım Ģekilleri SĠM
olduğundan ve anahtarlama frekansı (fs) Ģebeke frekansından (f) çok yüksek
olduğundan, her bir endüktörden geçen akım bir anahtarlama peryodu süresince sabit
alındı. Ayrıca, analizde devrede kullanılan elemanlar ideal kabul edildi. Bu
kabullenmeler neticesinde önerilen devrenin basitleĢtirilmiĢ eĢ değer devresi ġekil
5.2‟de aktarılmıĢtır.
iL1
iL2
iDo1
Do1
iDo2
Do2
Cr
D1
Vg
iDM1
iDM2
D2
DM1
DM2
D4
Vo
Cs
M2
M1
Lr
VCr
iLr
D3
Ma
iDMa
ġekil 5.2. Önerilen devrenin basitleĢtirilmiĢ eĢ değer devresi
Devredeki ana anahtarlar M1 ve M2 1800 faz farklı eĢit anahtarlama frekansı ve eĢit
görev çarpanı ile anahtarlanmaktadırlar. Yardımcı devre anahtarı Ma ise sabit görev
çarpanı ile her bir ana anahtardan önce anahtarlanmaktadır. Bu durumda, yardımcı
anahtarın anahtarlama frekansı ana anahtarların frekansının iki katıdır. EĢ. 3.1 ve
ġekil 3.5‟te aktarıldığı gibi devrenin giriĢ gerilimi (Vg) doğrultulmuĢ Ģebeke gerilimi
olup zamanla sinüzoidal olarak değiĢir. Buna bağlı olarak, devrenin görev çarpanı da
değiĢmektedir. 220 V etkin değere sahip Ģebeke gerilimi ve 400 V sabit DA çıkıĢ
gerilimi düĢünülürse, önerilen GKD devresinin görev çarpanı (d), 0,5‟ten büyük ve
küçük olmaktadır. Önerilen sarmaĢık yükselten GKD devresi, görev çarpanının
0,5‟ten büyük veya küçük olma durumuna göre farklı eĢ değer devrelere sahiptir.
82
Önerilen devre PSpice programı kullanılarak analiz edildi ve faklı görev çarpanı
değerleri için devrenin bütün durumları elde edildi. PSpice programı gerçek devre
elemanlarının modellerini içerdiğinden doğru sonuçlar elde etmek için tercih edildi.
Önerilen devrenin PSpice modelinde aĢağıda aktarılan değerler kullanıldı.
ÇıkıĢ gücü
: Po = 600 W
ÇıkıĢ gerilimi
: Vo = 400 V (gerilim kaynağı)
GiriĢ gerilimi
: Vin = 220 Vrms ( V g
GiriĢ Ģebeke frekansı
: f = 50 Hz
Anahtarlama frekansı
: fs = 50 kHz/anahtar
Yardımcı devre endüktör değeri
: Lr = 12 μH
Yardımcı devre kondansatörleri
: Cr = 10 nF, Cs = 2,2 nF
Ana anahtarlar (M1 ve M2)
: IRFP460
Yardımcı anahtar (Ma)
: IRFP450
ÇıkıĢ diyotları (Do1 ve Do2)
: DSEI30-12A
Yardımcı devre diyotları
: UF5408
Vin )
Yapılan analizler sonucunda, hem d>0,5 hem de d<0,5 değerleri için, önerilen
devrenin bir anahtarlama peryodunda onaltı durumunun olduğu tespit edildi.
Önerilen sarmaĢık yükselten GKD devresi, iki adet 1800 faz farklı eĢit anahtarlama
frekansı ve eĢit görev çarpanı ile anahtarlandığından, devrenin her bir anahtarlama
peryodunda oluĢan onaltı farklı durumu sekizerli olarak ikiye ayırabiliriz. Birinci
sekiz durumdaki eĢ değer devreler ile ikinci sekiz durumdaki eĢ değer devreler bir
birinin aynısıdır. Bu iki gurup arasındaki fark her bir güç katına ait olan anahtar ile
çıkıĢ diyodu farkıdır. Yani, birinci sekiz durumdaki eĢ değer devrelerde M2 ile M1 ve
Do2 ile Do1 değiĢiklikleri yapılarak, ikinci sekiz durumdaki eĢ değer devreler elde
edilir. Bu nedenle, sadece ilk sekiz durumdaki eĢ değer devrelerin analizi
aktarılmıĢtır. Önerilen devrenin PSpice analizinden elde edilen teorik dalga Ģekilleri
d<0,5 için ġekil 5.3‟te ve d>0,5 için ise ġekil 5.4‟te aktarılmıĢtır. Ayrıca, d>0,5 için
önerilen devrenin durum eĢ değer devreleri ġekil 5.5‟te aktarılmıĢ ve devamında her
bir durum detaylı olarak irdelenmiĢtir.
83
td M1 için
td M2 için
VGSM1
d
VGSM2
VGSMa
VDSMa
iDMa
VDSM1
Vo
SGG
iDM1
iL1
VDSM2
iDM2
iLrmax
iLr
i L1
VCr
VDo1
iDo1
VDo2
iDo2
t
t0 t2
t1 t3
t4
t6
t5 t 7
t8 t10
t9 t11
t12
t14 t16 = t0
t13 t15
Ts1
ġekil 5.3. Önerilen devrenin bir anahtarlama peryodundaki teorik dalga Ģekilleri
(d<0,5 için)
84
td M1 için
VGSM1
td M2 için
d
Deff
VGSM2
VGSMa
VDSMa
iDMa
VDSM1
Vo
iDM1
iL1
VDSM2
SGG
iDM2
iLrmax
iLr
i L1
VCr
VDo1
iDo1
VDo2
iDo2
t
t0 t2
t1 t3
t4 t6
t7
t5
t8 t10 t12 t14
t9 t11 t13 t15
t16 = t0
Ts1
ġekil 5.4. Önerilen devrenin bir anahtarlama peryodundaki teorik dalga Ģekilleri
(d>0,5 için)
85
iL1
iDo1
Do1
iL1
iDo1
Do1
iL2
iDo2
Do2
iL2
iDo2
Do2
Cr
Cr
D1
Vg
iDM2
iDM1
M1
VCr
D2
Lr
Cs
M2
DM1
DM2
D1
D4
iLr
Vg
iDM2
iDM1
Vo
DM1
Ma
iDMa
Lr
DM2
D3
Ma
iDMa
a-) durum-1: t0<t<t1
b-) durum-2: t1<t<t2
iL1
iDo1
Do1
iL1
iDo1
Do1
iL2
iDo2
Do2
iL2
iDo2
Do2
Cr
Cr
D1
Vg
iDM2
iDM1
M1
VCr
D2
Lr
DM2
DM1
D1
D4
Vg
iLr
iDM2
iDM1
D2
Vo
Cs
M2
DM1
Ma
Lr
Cs
M2
M1
D3
DM2
Vg
iDM1
iDo1
Do1
iL1
iDo2
Do2
iL2
Cr
D2
VCr
Lr
Cs
M2
M1
DM1
DM2
Ma
D4
iLr
Vg
iDM1
Lr
Vo
Cs
M2
M1
DM1
DM2
Ma
f-) durum-6: t5<t<t6
Do1
iL1
iDo1
Do1
iDo2
Do2
iL2
iDo2
Do2
Cr
D2
VCr
iLr
Cr
D1
D4
Vg
iDM1
iDM2
D2
Vo
Cs
M2
M1
DM1
DM2
Vo
D3
iDo1
Lr
D3
iDMa
g-) durum-7: t6<t<t7
Lr
DM2
VCr
iLr
D4
Vo
Cs
M2
M1
DM1
Ma
D4
iLr
iDMa
D1
iDM2
Do2
VCr
iDM2
e-) durum-5: t4<t<t5
iDM1
iDo2
Cr
iDMa
Vg
Do1
D2
Ma
iL2
iDo1
D1
D3
iL1
Vo
d-) durum-4: t3<t<t4
D1
iDM2
D4
iDMa
c-) durum-3: t2<t<t3
iL2
VCr
iLr
D3
iDMa
iL1
D4
iLr
Vo
Cs
M2
M1
D3
VCr
D2
D3
Ma
iDMa
h-) durum-8: t7<t<t8
ġekil 5.5. Önerilen devrenin bir anahtarlama peryodundaki farklı durumlarına ait eĢ
değer devreleri (d>0,5 için)
86
durum-1; (t0<t<t1) (ġekil 5.5-a). t0‟dan önce, ana anahtar M1 ile yardımcı anahtar Ma
kesimde (OFF) ve birinci güç katının çıkıĢ diyodu D01 iletimde (ON) dir. t0‟da, Ma
yardımcı devre anahtarı iletime (ON) sokulunca, Lr üzerinden akacak rezonant akımı
yükselmeye baĢlar. Ma yardımcı devre anahtar akımının zamanla yükselme oranı
(di/dt) Lr endüktörü ile sınırlandırıldığından, Ma yumuĢak anahtarlama ile iletime
sokulmuĢ olunur ve birinci güç katı çıkıĢ diyodunun (D01) akımı doğrusal olarak
düĢer. Bu nedenle, D01 diyodunun ters akımından dolayı oluĢan ters toparlanma
kaybı (the reverse recovery loss) büyük ölçüde elimine edilmiĢ olunur. Cs‟nin
üzerindeki gerilim Vo‟a eĢit olduğundan, bu durumdaki zaman ve Lr akımı;
i Lr (t )
VCs
(t1 t 0 )
Lr
Vo
(t t 0 )
Lr
VCr (t ) 0
(t1 t 0 )
i Do1 (t )
(5.1)
(5.2)
t1
i L1
i L1 Lr
(5.3)
Vo
i Lr
(5.4)
eĢitlikleri ile ifade edilir.
durum-2; (t1<t<t2) (ġekil 5.5-b). t=t1 de Do1‟in akımı sıfır olur. Cs kondansatörü
boĢalmaya baĢlar ve Lr akımı Lr ile Cs arasındaki rezonanstan dolayı artmaya devam
eder. Cs, üzerindeki gerilim sıfır oluncaya dek (t2‟ye kadar) deĢarj olur. Bu rezonans
zaman peryodu, ∆t2 ve ilgili akım-gerilim eĢitlikleri aĢağıdaki gibi ifade edilir;
i Lr (t ) i L1
Vo
sin w1 (t
Z1
t1 )
(5.5)
87
t1 )
(5.6)
Lr C s
(5.7)
VCs (t ) Vo cos w1 (t
(t 2 t1 )
t2
2
burada, 1 1 / Lr C s ve Z1
Lr / C s tir.
durum-3; (t2<t<t3) (ġekil 5.5-c). t=t2‟den hemen önce M1 ile Do1 kesim (OFF) ve M2
ile yardımcı devre anahtarı, Ma iletim (ON) durumundadırlar. Ma, yardımcı devre
anahtarı iLr akımını her iki ana anahtarın gövde diyotları vasıtasıyla taĢır. t2‟de Cs
kondansatörü tamamen boĢalır ve Lr akımı tepe değerine ulaĢır. Cs kondansatörü ana
anahtarların ve
yardımcı
devre
elemanlarının
parazitik
kapasitörlerini
de
kapsamaktadır. Bu zaman diliminde, iLr akımı Lr, Ma ve ana anahtarların gövde
diyotları üzerinden geçmektedir. Bu durumdaki iLr akımının tepe değeri EĢ. 5.8 ile
ifade edilir.
i Lr (t ) i Lr max
i L1 Vo / Z1
(5.8)
VCr (t ) 0
(5.9)
Bu zaman diliminde, M1 ana anahtarı SGG koĢulu ile anahtarlanmalıdır. Yani SGG
koĢulu için gövde diyodu iletimi devam etmelidir. M1, ana anahtarını SGG koĢulu ile
iletime sokmak için gerekli olan asgari td zamanı ise EĢ. 5.10 ile belirlenir.
td
t1
t2
i L1 Lr
Vo
2
Lr C s
iin Lr
2 Vo
2
Lr C s
(5.10)
EĢ. 5.10‟da görüldüğü gibi, en kötü durum giriĢ akımının en yüksek değerinde
oluĢmaktadır. GKD devrelerinin giriĢ ve çıkıĢ gerilim değerleri ile nominal güç
değerleri tasarım baĢlangıcında belirlendiği için, yardımcı devre parametreleri giriĢ
88
akımının en yüksek olduğu değere (en kötü Ģart) göre belirlenmelidir. Diğer bir
değiĢle, EĢ. 5.10‟da verilen gecikme zamanı ve yardımcı devre parametreleri
belirlenirken en olumsuz koĢullar dikkate alınmalıdır.
durum-4; (t3<t<t4) (ġekil 5.5-d). t3‟ten önce Ma yardımcı anahtarı iLr akımını ve M1
ana anahtarının gövde diyodu ise bu akımın bir kısmını iletir. t3‟te, aynı anda Ma
yarımcı anahtarı kesime ve M1 ana anahtarı iletime sokulur. Bu zaman diliminde M1
ve M2 ana anahtarları giriĢ akımını birlikte taĢırlar. Yardımcı devre kondansatörü (Cr)
dolmaya baĢlar ve Lr üzerindeki akım bu zaman diliminin sonuna kadar düĢmeye
baĢlar. Cr kondansatörü Ma yardımcı anahtar geriliminin zamanla yükselmesini
sınırlamaktadır. Bu nedenle, Ma yardımcı anahtarın kesime sokulması yumuĢak
anahtarlama ile olmaktadır. Lr-D3-Cr arasında bir rezonans baĢlar ve Lr‟de birikmiĢ
enerji Cr kondansatörüne aktarılır. Cr‟nin üzerindeki gerilim ve Lr akımı aĢağıda
aktarıldığı gibi ifade edilebilir;
iLr (t )
iD3
iLr max cos 2 (t t3 )
VCr (t ) i Lr max Z 2 sin w2 (t
burada, 2 1 / Lr Cr ve Z 2
t3 )
(5.11)
(5.12)
Lr / Cr dir.
durum-5; (t4<t<t5) (ġekil 5.5-e). Bu zaman dilimi M2 ana anahtarının kesime
girmesiyle baĢlar. Cs kondansatörü dolmaya baĢlar. Lr‟de birikmiĢ enerjinin Cr
kondansatörüne transferi devam eder. Ma yardımcı anahtarı üzerindeki gerilim bu
zaman dilimi sonunda çıkıĢ gerilimine ulaĢır. Cr kondansatörü M2 anahtarının
gerilimini sınırladığından, M2 anahtarı yumuĢak anahtarlama ile kesime gitmiĢ olur.
durum-6; (t5<t<t6) (ġekil 5.5-f). t5‟te M2 anahtarının akımı sıfıra düĢer ve Ma
anahtarının gerilimi çıkıĢ gerilimine (Vo) ulaĢır. Cr kondansatörü D4 yardımcı devre
diyodu üzerinden çıkıĢa boĢalır. Bu zaman diliminin sonunda, iLr akımı sıfıra düĢer.
89
Cr kondansatörü tam boĢalmadığından, bu kondansatörün boĢalma iĢlemi devam eder
ve Cs kondansatörü ise dolmaya devam eder.
durum-7; (t6<t<t7) (ġekil 5.5-g). t6‟da, Lr akımı sıfırdır. Bu zaman diliminde, sadece
M1 ana anahtarı iletimdedir. Yardımcı devre kondansatörü, Cr boĢalırken Cs
kondansatörü çıkıĢ gerilimine kadar dolar. Bu sürecin sonunda, Cr kondansatörü
tamamen boĢalırken, Cs kondansatörünün gerilimi çıkıĢ gerilimine eĢit olur.
Yardımcı devre diyodu, D4 ters akımdan kaynaklı kayıplar olmadan kesime gider.
Durum-5,6 ve 7 süreçlerinde, Cs üzerindeki gerilim EĢ.5.13 ile ifade edilir.
(5.13)
VCs (t ) Vo VCr (t )
durum-8; (t7<t<t8) (ġekil 5.5-h). t7‟de Cr kondansatörü üzerindeki gerilim sıfıra
düĢünce, ikinci güç katının çıkıĢ diyodu, Do2 iletime geçer. Bu zaman diliminde, Do2
çıkıĢ diyodu ikinci güç katının akımını (iL2) iletirken, birinci güç katının akımı (iL1)
M1 ana anahtarı üzerinden geçer. Bu zaman süreci, ikinci güç katı için Ma yardımcı
devre anahtarının iletime geçirilmesi ile son bulur. Bu zaman sürecinde M1 ve Do2
tarafından paylaĢılan giriĢ akımı EĢ. 5.14 ile ifade edilir.
iin
i L1
i L2
i DM 1
i Do2
(5.14)
durum-9-16; Önerilen sarmaĢık yükselten GKD devresindeki iki adet güç katı 1800
faz farklı eĢit anahtarlama frekansı ve eĢit görev çarpanı ile anahtarlandığından,
devrenin her bir anahtarlama peryodunda oluĢan son sekiz durum (durum-9-16) ile
ilk sekiz durum (durum-1-8) bir birinin aynıdır. Bu iki gurup arasındaki fark her bir
güç katına ait olan anahtar ile çıkıĢ diyodu farkıdır. Yani, Çizelge 5.1‟de aktarıldığı
gibi, birinci sekiz durumdaki eĢ değer devrelerde M2 ile M1 ve Do2 ile Do1
değiĢiklikleri yapılarak, ikinci sekiz durumdaki (durum-9-16) eĢ değer devreler elde
edilir. Bu nedenle, sadece ilk sekiz durumdaki eĢ değer devrelerin analizi
aktarılmıĢtır.
90
Çizelge 5.1. Önerilen SGG sarmaĢık yükselten GKD devresinin çalıĢma durumları
ÇalıĢma durumları
Vo/2 < Vg (d<0,5)
ÇalıĢma durumları
Vo/2 > Vg (d>0,5)
Ġletimdeki yarıiletkenler
Ġletimdeki yarıiletkenler
durum-1: (t0<t<t1)
Ma, Do1, Do2 : ON
Ma, M2, Do1 : ON
durum-2: (t1<t<t2)
Ma : ON
Ma, M2 : ON
durum-3: (t2<t<t3)
Ma, Do2 : ON
Ma, M2 : ON
durum-4: (t3<t<t4)
M1, Do2 : ON
M1, M2 : ON
durum-5: (t4<t<t5)
M1, Do2 : ON
M1 : ON
durum-6: (t5<t<t6)
M1, Do2 : ON
M1: ON
durum-7: (t6<t<t7)
M1, Do2 : ON
M1: ON
durum-8: (t7<t<t8)
Do1, Do2 : ON
M1, Do2 : ON
durum-9: (t8<t<t9)
Ma, Do1, Do2 : ON
Ma, M1, Do2 : ON
durum-10: (t9<t<t10)
Ma : ON
Ma, M1 : ON
durum-11: (t10<t<t11)
Ma, Do1 : ON
Ma, M1 : ON
durum-12: (t11<t<t12)
M2, Do1 : ON
M1, M2 : ON
durum-13: (t12<t<t13)
M2, Do1 : ON
M2 : ON
durum-14: (t13<t<t14)
M2, Do1 : ON
M2: ON
durum-15: (t14<t<t15)
M2, Do1 : ON
M2: ON
durum-16: (t15<t<t16)
Do1, Do2 : ON
M2, Do1 : ON
5.2. Güç Devresi Tasarım Kriterleri
Önerilen çalıĢmanın güç devresi, ġekil 5.1‟den görüldüğü gibi, bir adet tek fazlı
diyotlu doğrultucu ve iki adet faz farklı güç katı içeren paralel yükselten devreden
oluĢmaktadır. ÇıkıĢ kondansatörü haricinde, yükselten güç katı devreleri birer adet
endüktör, MOSFET anahtar ve çıkıĢ diyodu içermektedir. YumuĢak anahtarlama için
kullanılan devrede ise ana anahtarların anma değerlerinden daha düĢük değere sahip
bir MOSFET anahtar, bir adet küçük değerli endüktör, iki adet küçük değerli
kondansatör ve dört adet diyot kullanılmaktadır. Ayrıca, kontrol devresinde
kullanılmak üzere, gerilim ve akım örnekleme devreleri kullanılmaktadır. ÇıkıĢ ve
91
giriĢ gerilimleri LEM firmasının üretmiĢ olduğu LV 25-P gerilim dönüĢtürücüsü
kullanılarak, doğrultulmuĢ akım ise yine aynı firmanın üretmiĢ olduğu LA 55-P akım
dönüĢtürücüsü kullanılarak örneklenmiĢtir.
Önerilen devrenin tasarım kriterleri 600 W çıkıĢ gücüne göre yapılmıĢtır. Devrede
kullanılan elemanların değerleri, tasarım çalıĢmalarından elde edilen değerlerden
daha yüksek seçildiği için, devre 600 W çıkıĢ gücünün de üzerinde çalıĢabilmektedir.
Devrede kullanılan elemanların değerleri belirlenmeden, tasarım çalıĢması için
kullanılan değerler Çizelge 5.2‟de aktarılmıĢtır. Çizelgede aktarılan 50 kHz‟lik
anahtarlama frekansı her bir güç katına aittir. Daha önce bahsedildiği üzere, yardımcı
devre anahtarlama frekansı bunun iki katı olmaktadır.
Çizelge 5.2. Önerilen devrenin tasarım çalıĢmasında kullanılan değerler
Parametre
Değeri
Birimi
600
W
110-220
V_rms
ġebeke gerilimi, f
50
Hz
Ortalama çıkıĢ gerilimi, Vo
400
V
Anahtarlama frekansı, fs
50
kHz/faz
Endüktör akım dalgacık oranı, ∆iL
10
%
ÇıkıĢ gerilim dalgacık oranı, ∆Vc
2
%
ÇıkıĢ gücü, Po
GiriĢ Ģebeke gerilimi, Vin
5.2.1. Endüktör ve çıkıĢ kondansatör değerlerinin belirlenmesi
EĢ. 3.65 ve ġekil 5.4 kullanılarak, sarmaĢık yükselten devrenin giriĢ ve çıkıĢ
geriliminin görev çarpanı ile iliĢkisini EĢ. 5.15 ile verebiliriz.
Vo
1
Vg
1 Deff
(5.15)
92
burada, Deff önerilen devrenin etkin görev çarpanı olup giriĢ akımı ve endüktör
akımları üzerinden ġekil 5.6‟da gösterilmiĢtir. Önerilen devredeki yardımcı anahtarın
iletim süresi de görev çarpanına katkı sağladığı görülmektedir.
(1-Deff)Ts
iin
iL1
∆iL1
0.5 Ts
∆iL2
iL2
Ts
t
ġekil 5.6. Önerilen devrenin akım dalga Ģekilleri ve etkin görev çarpanı
EĢ. 5.15‟ten etkin görev çarpanının en düĢük değeri giriĢ geriliminin en yüksek
olduğu durumda oluĢmaktadır. Çizelge 5.2‟deki değerlerden, giriĢ geriliminin en
yüksek değeri tepe değeri ( 2 220V ) yaklaĢık 311 V‟tur. 400 V çıkıĢ gerilimi ele
alındığında, etkin görev çarpanının (Deff) en düĢük değeri 0,2225‟tir. SarmaĢık
yükselten GKD devresinin giriĢ gerilimi zamanla değiĢen sinüzoidal gerilim
olduğundan, etkin görev çarpanının en yüksek değeri teorik olarak 1‟dir. Fakat, devre
parametrelerindeki kısıtlamalardan dolayı bu değer uygulamada asla oluĢmaz.
GiriĢ ve çıkıĢ akımları verim ve görev çarpanı cinsinden,
Io
(1 Deff ) iin
(5.16)
93
eĢitliği ile ifade edilir. SĠM akım dalga Ģekline sahip endüktörlerin akım dalgacık
oranı 3. bölümde EĢ. 3.13 ile elde edilmiĢti. Bu ifadeyi önerilen devreye uygularsak
EĢ. 5.17 elde edilir.
iL
Deff Ts
L
Vg
Deff Ts
L
Vin (t )
Deff Ts
L
V1rms sin(2
f)
(5.17)
5.15 eĢitliğini 5.17 eĢitliğinde kullanırsak, EĢ. 5.18 elde edilir.
L
Deff (1 Deff ) Ts
iL
Vo
(5.18)
Çizelge 5.2‟deki değerler dahilinde, EĢ. 5.18 kullanılarak her bir endüktörün değeri
en küçük etkin görev çarpanında yaklaĢık 140 μH olarak elde edilmektedir. Fakat,
sürekli iletim durumunu muhafaza etmek için EĢ. 3.15 kullanılırsa LSİM değeri
yaklaĢık 360 μH olarak elde edilmektedir.
EĢ. 3.14‟te verilen ifade yeniden düzenlenirse, çıkıĢ kondansatörü çıkıĢ gerilim
dalgacık oranı cinsinden,
Co
Po Deff
Vo f s
(5.19)
ifadesi elde edilir. En düĢük görev çarpanı durumunda çıkıĢ kondansatör değeri
yaklaĢık 335 μF olarak belirlenmektedir.
5.2.2. Devrede kullanılan ana anahtar ve diyotların belirlenmesi
Bir güç elektroniği devresinde kullanılan güç yarıiletkenleri belirlenirken, maruz
kalacakları gerilim ve üzerinden akıtacakları akım değerleri dikkate alınır. Bu
nedenle, güç yarıiletkenleri belirlenmeden devredeki en yüksek gerilim ve akım
94
değerleri tespit edilir. Önerilen devre yükselten bir devre olduğundan kullanılacak
güç yarıiletkenlerin maruz kalacağı en yüksek gerilim çıkıĢ gerilimi olur. Bu nedenle,
devredeki güç katları için kullanılan yarıiletkenlerin mutlaka 400 V gerilime
dayanımlı olması gerekir. Kontrol içerikli bir devre olduğundan, devrenin geçici
durumları da göz önüne alınmalıdır. Dolayısıyla, güç katlarında kullanılacak güç
yarıiletkenlerin 400±%20 V gerilime dayanımlı olması gerekir. Devredeki ana
anahtar ve diyotların akım değerleri belirlenirken devreden geçecek tepe akım değeri
hesaplanması gerekir. Önerilen devre yükselten tip olduğundan geçecek en yüksek
akım değeri giriĢ akımının tepe değeridir. GiriĢ akımının tepe değeri, en düĢük etkin
değere sahip giriĢ geriliminin tepe değerinde oluĢmakta ve,
iin, max
2
Po
Vin, rms
2
600
0.95 110
8.11 A
(5.20)
eĢitliği ile hesaplanır. Burada önerilen devre için giriĢ geriliminin en düĢük etkin
değeri 110 V olup, devrenin verimi (ή) ise 0,95 olarak alınmıĢtır. Önerilen devrenin
geçici durumları da düĢünülürse, kullanılacak ana anahtar ve diyotlar 10 A
değerinden daha yüksek akıma dayanımlı olmaları gerekir.
Elde edilen bu gerilim ve akım değerleri dikkate alınarak, önerilen devrenin güç
katlarında IRFP460 MOSFET anahtarı ve IXYS DSEI 30-12A hızlı diyodu
kullanılmıĢtır. IR firması tarafından üretilen IRFP460 MOSFET anahtarı ve IXYS
firması tarafından üretilen IXYS DSEI 30-12A diyodunun katalog bilgileri Ek-1 ve
2‟de verilmiĢtir.
5.2.3. Yardımcı devre parametrelerinin belirlenmesi
Önerilen devrenin değiĢik yük durumlarında (300-600 W) ve geniĢ giriĢ gerilim
değiĢimlerinde (110-220 V) SGG koĢulunu sağlayarak çalıĢtırılması bu tez
çalıĢmasının en önemli noktasını oluĢturur. Bu bağlamda, SGG koĢulu için ana
anahtarlara uygulanacak gecikme süresinin (yani yardımcı devre anahtarının görev
95
çarpanının) belirlenmesi ve dönüĢtürücünün boyutunu arttırmayacak düzeyde
yardımcı devre elemanlarının belirlenmesi önemlidir. Önerilen yardımcı devrenin
analizinden elde edilen EĢ. 5.10 kullanılarak hem gecikme zamanı (td) hem de
yardımcı devre elemanları belirlenir. EĢ. 5.10‟u yeniden kısaca düzenlersek,
td
iin Lr
2 Vo
2
Lr C s
(5.21)
EĢ. 5.21 elde edilir. EĢ. 5.21‟den, gecikme süresinin yardımcı devre parametrelerinin
yanı sıra, giriĢ akımı ve çıkıĢ gerilimine bağlı olduğu görülmektedir. Yükselten GKD
devrelerinde çıkıĢ gerilimi sabit olup baĢlangıçta belirlenir. Gerekli gecikme süresini
(td) arttıran etkenin yardımcı devre parametreleri dıĢında giriĢ akımı olduğu
görülmektedir. GiriĢ akımının artması gecikme süresini arttırmaktadır. Bu durumda,
en kötü koĢullar için giriĢ akımı belirlenir. EĢ. 5.20‟de giriĢ geriliminin en düĢük
değeri için giriĢ akımının en yüksek değerde (sabit güçte) ve bunun da 8,11 A olduğu
belirlenmiĢti. Geçici durumlarda düĢünülerek giriĢ akımının tepe değeri 12 A olarak
seçilebilir.
Önerilen devrenin gecikme süresi için giriĢ akım ve çıkıĢ gerilim koĢulları
belirlendikten sonra, yardımcı devre parametrelerinin belirlenmesi gerekir. Yardımcı
devre parametreleri bir endüktör, iki kondansatör ve pasif yarıiletken olan
diyotlardan oluĢmaktadır. Pasif yarıiletken olan diyotlar ve devrede kullanılan Cr
kondansatörü gecikme süresini etkilememektedir. Lr endüktörü ve Cs kondansatörü
belirlenirken gecikme süresi olan td‟nin makul değeri dikkate alınır. td süresi
yükselten GKD devresinin en düĢük görev çarpanından büyük olmamalıdır.
SarmaĢık yükselten GKD devresinin en düĢük görev çarpanı giriĢ geriliminin en
yüksek değerinde oluĢtuğu ve bunun 0,2225 olduğu yukarıda aktarılmıĢtı. 50 kHz‟lik
anahtarlama frekansının anahtarlama peryodu 20 μsn olduğundan, 0,2225
değerindeki görev çarpanının zaman değeri 4,45 μsn (0.2225 x 20 μsn = 4,45 μsn)
dir. Bu değer dikkate alınırsa, 1 μsn değerinde bir gecikme süresi makul bir değerdir.
Devre boyutu dikkate alındığında, yardımcı devrede kullanılan endüktörün seçimi
96
kondansatörden önce gelir. Çünkü endüktör değerleri arttıkça boyutları da o oranda
artmaktadır. Ayrıca, yardımcı devrelerde kullanılan kondansatörler oldukça düĢük
boyutludur ve değerlerinin iki yada dört katı büyüklükte kullanılmaları dönüĢtürücü
boyutunu arttırmaz. Bu nedenle, önerilen yardımcı devrede kullanılan endüktör
değeri 12-15 μH (Lr = 12-15 μH) ve kondansatör değeri ise 1-3 nF (Cs = 1-3 nF)
olarak belirlenebilir. 15 μH‟lik endüktör ve 2,2 nF‟lık bir kondansatör seçimi ile
oldukça küçük boyutlu bir yardımcı devre tasarımı yapılır. Bu durumda, gerekli olan
gecikme süresi, td,
td
12 x15 x10 6
2 400
2
15 x10 6 x 2.2 x10 9
0.55 sn
(5.22)
olarak belirlenir. Tüm koĢullarda SGG‟nin sağlanması için 0,55 μsn‟lik bir gecikme
süresinin uygulanması yeterlidir. Belirlenen bu gecikme süresi aynı zamanda
yardımcı anahtarın görev çarpanıdır. ġekil 5.4‟te görüldüğü üzere yardımcı anahtarın
görev çarpanı (dolayısıyla gecikme süresi, td) önerilen devrenin etkin görev
çarpanına (Deff) ilave olmaktadır. Bu nedenle, önerilen bu yöntem sarmaĢık yükselten
GKD devresinin görev çarpanına her hangi bir sınırlama getirmemektedir. Tam tersi,
süresi oranında ana anahtarların iletim süresini paylaĢarak uzun ömürlü olmalarına
katkı sağlamaktadır. Gecikme süresi, td belirlenirken dikkat edilecek en önemli nokta
SGG koĢulu için EĢ. 5.22‟nin sağlanmasıdır. Yardımcı devrede kullanılan diğer
kondansatör, Cr ise yardımcı endüktörde depolanan enerjinin transferi için kullanılır
ve 10-20 nF değerindedir.
5.3. Kontrol Devresi Tasarımı
ġekil 5.7‟de görüldüğü üzere, kontrol devresi sinyal örnekleme devresi, kontrolcü
(TMS320F2812 eZdsp) ve sürücü devresinden oluĢmaktadır. GKD kontrolcüsü
olarak TMS320F2812 eZdsp kartı kullanıldığından, iĢlenecek sinyallerin değerleri bu
karta uygun düzeye (0-3 V seviyesine) çekilmesi gerekir. Ayrıca, DSP kartının PWM
çıkıĢları 0-3 V seviyesinde olduğundan, güç devresindeki anahtarların sürülmesi için
97
bu 0-3 V seviyesindeki sinyaller sürücü devresi vasıtasıyla yükseltilmesi gerekir.
ÇalıĢmanın bu bölümünde, kontrol devresindeki birimler incelendikten sonra
ortalama akım kontrol yöntemindeki kontrolcülerin tasarlanması ele alınmıĢtır.
VgM1
VgMa
VgM2
Sürücü devresi
Sinyal
örnekleme
devresi
Vo
Kg
Ko
ADCINA1 ADCINA0
Vg
Ki
ADCINA2
ig
PWM1
PWM2
PWM3
faz-farklı
PWM
Gi
.
AGS
2
x
ig,ort
ei
B
ig,ref
C2
(A*B)/C2
Vo,ref
A
Gv
ev
TMS320F2812 eZdsp
ġekil 5.7. Önerilen çalıĢmanın kontrol devresi birimleri
5.3.1. TMS320F2812 eZdsp kartı
1970'lerin sonlarından günümüze geniĢ bir uygulama alanı bulan DSP‟ler, veri
sıkıĢtırma, görüntüleme, radar, yer hareketleri kaydı ve analizi, simülasyon ve
modelleme, süreç izleme ve kontrol, filtreleme, v.b. bir çok alanda kullanıldıkları
gibi güç elektroniği uygulamalarında da sıkça kullanılmaktadırlar. Güç elektroniği
sürücü düzeneklerinde kullanılan yarı iletken anahtarların daha hızlı ve daha
98
karmaĢık denetimleri, sürekli geliĢen mikroiĢlemci teknolojisiyle daha kolay
yapılabilmektedir.
Texas Instruments (TI) firmasının geliĢtirdiği DSP‟ler endüstrinin yüksek
performans ve kod verimli uygulamalarında sayısal kontrol imkanı sağlamaktadırlar.
TMS320C2000 DSP denetleyici ailesi tümleĢik çevresel yapı standardına sahip olup,
flash bellek, çok hızlı A/D dönüĢtürücü modülleri, PWM modülleri, ve CAN
(Controller Aerea Network ) modülleri gibi bir çok çevresel birim içerirler.
Spectrum Digital tarafından deneysel kullanımlar için geliĢtirilmiĢ TMS320F2812
eZdsp kartı, TMS320C28X DSP ailesinden TMS320F2812 iĢlemcisini içeren ve
genellikle akademik çalıĢmalarda tercih edilen bir karttır. Bu kart TMS320F2812
iĢlemcisi haricinde iĢlemci arabirimlerine kolaylıkla ulaĢımı sağlayan farklı çevresel
birimleri de içerir. TMS320F2812 iĢlemcisi bir çok kontrol uygulamasında yüksek
performanslı çözümler sunar. 32-bit DSP çekirdeği, 6,67 ns çevirimde (cycle) 32x32
bit MAC (Media Access Control ) etkili ve bir flash iĢleminde 150 MIPS (Millions
of Instructions Per Second) performans sağlar. TMS320F2812‟nin en önemli
özelliklerinden biri çok hızlı eriĢimli yonga (chip) üzerine yerleĢik flash bellektir,
böylece kod harici belleğe gerek olmaksızın yapı içerisinde çalıĢtırılabilir. ġekil
5.8‟de gösterilen TMS320F2812 eZdsp kartının özellikleri özetle aĢağıda
aktarılmıĢtır [54].
Yüksek performanslı 32-bit CPU
150 MIPS iĢlem hızı
16 kanal 12-bit 12,5 MSPS iĢlem hızlı ADC
6 çift tümleyenli 4 bağımsız toplam 16 PWM
Programlanabilir ölü zaman mantığı
4 adet genel amaçlı zamanlayıcı/sayıcı
56 bağımsız programlanabilir genel amaçlı giriĢ/çıkıĢ pini (GPIO)
18 K Word RAM ve 128 K Word dahili Flash EEROM
IQMath kütüphane desteği ile floating-point iĢlem kolaylığı
C/C++ programlama desteği
99
ġekil 5.8. TMS320F2812 eZdsp kartı ve ara birimleri
TMS320F2812 eZdsp kartı ġekil 5.9‟da aktarılan ve Texas Instruments firmasının
ürettiği
C/C++
destekli
CCS
(Code
Composer
Studio)
programı
ile
programlanmaktadır. ĠĢlemcinin programlanmasında C++ ve ASM kullanılabildiği
gibi, MATLAB Simulink gibi özel paket programlar da kullanılabilmektedir. Ancak
oluĢturulan program kodları yine CCS aracılığıyla iĢlemciye yüklenmektedir.
Programlama penceresinin yanı sıra farklı pencerelere sahip CCS ara yüzü,
kullanıcılara büyük kolaylık sağlamaktadır. Bellek ve CPU gözlem pencerelerinin
yanı sıra, gözlem penceresi ile programda kullanılan verilerin değerleri
izlenebilmektedir. CCS ara yüzünün en önemli özelliklerinden biri grafik
penceresidir. Grafik menüsünde bulunan gerçek zaman gösterim (real time
presentation) ayarlanarak DSP‟de iĢlenen sinyaller gerçek zamanlı olarak
izlenebilmektedir.
Güç elektroniği uygulamalarında ADC ve PWM modülleri DSP içerisindeki en
önemli birimlerdir. TMS320F2812 yüksek performanslı ADC ve PWM üreteçleri
sağlar ve bu yapı dönüĢtürücülerin yüksek gereksinimlerini karĢılamaya olanak
100
sağlar. AĢağıda DSP‟nin ADC ve PWM modülleri hakkında daha detaylı bilgi
aktarılmıĢtır.
ġekil 5.9. CCS programı ara yüz görünümü
ADC (Analog-to-Digital Converter)
TMS320F2812 iĢlemcisi 12-bit çözünürlüklü 16 adet (2x8) 0-3V DA analog giriĢli
bir ADC‟ye sahiptir. Programın iĢlemcide koĢturulması sırasında okunacak analog
giriĢlerin sayısı ve analog iĢaretin hangi bacağa bağlandığı, dönüĢtürme sırası ve
biçimi ayarlanmalıdır. Örnekleme zamanı ve dönüĢtürülen iĢaretin sayısal değerinin
ana program tarafından hangi sıklıkla alınacağı belirlenir. ADC‟nin örnekleme hızı
ise sistem saat hızına göre bağımsız olarak ayarlanabilmektedir. TMS320F2812‟nin
ADC modülünün özellikleri aĢağıda verilmiĢtir.
12-bit çözünürlüklü ADC çekirdeği
16 giriĢ sinyali (0-3V)
2 analog çoklayıcı
2 örnekle/tut (sample/hold) unitesi
101
ArdıĢık ve simultane örnekleme modları
16 otomatik dönüĢtürme özelliği
16 bağımsız adreslenebilen sonuç kayıtçısı
TMS320F2812‟nin ADC birimi; program, olay yöneticisi (Event Maneger, EV-A/B)
veya harici pinler tarafından tetiklenebilir. ADC çalıĢma zamanı maksimum 25
MHz‟e
ayarlanabilmektedir.
Sayısal
değere
dönüĢtürülen
analog
sinyaller
ADCRESULTx kayıtçılarında tutulur. Bu kayıtçılar 16-bit olmasına rağmen ADC
12-bit olduğundan tutulan sayısal bilgi normal analog değerine dönüĢtürülmeden
önce 4-bit sağa kaydırılarak (örneğin; Ref_Vo_dijital=AdcRegs.ADCRESULT0 >>4
Ģeklinde) kullanılır. TMS320F2812‟nin ADC giriĢine uygulanan analog sinyal ile
içeride okunan dijital değer arasındaki bağıntı aĢağıdaki eĢitlikle ifade edilir.
V Ana log
3
VDijital
4095
(5.23)
Olay Yöneticisi (Event Manager)
TMS320F2812 iĢlemcisi iki adet olay yöneticisi (EV-A/B) içerir. Her EV modülünde
iki tane genel amaçlı zamanlayıcı (GP Timer) bulunur. Bu genel amaçlı
zamanlayıcılar, 16 bit‟lik TxCNT sayıcı, TxCMPR karĢılaĢtırıcı, TxPR peryot,
TxCON kontrol kaydedici ve seçilebilir harici veya dahili giriĢ saati içerir. Genel
amaçlı zamanlayıcılar bağımsız bir Ģekilde veya birbirleri ile senkron bir Ģekilde
çalıĢtırılabilirler. KarĢılaĢtırma kaydedicisi her bir genel amaçlı zamanlayıcıyla
birlikte karĢılaĢtırma fonksiyonu ve PWM dalga Ģekli üretimi için kullanılabilir.
Yukarı veya yukarı/aĢağı sayıcı operasyonundaki her bir genel amaçlı zamanlayıcı
için üç sürekli operasyon modu vardır. Genel amaçlı zamanlayıcılar aynı zamanda
olay-yönetici alt modüllerinin zaman kaynağını sağlarlar.
102
Her bir olay yöneticisinde üç tane tam karĢılaĢtırma ünitesi vardır. Bu karĢılaĢtırma
üniteleri genel amaçlı zamanlayıcıları ve programlanabilir ölü bant devresini
kullanarak PWM dalga Ģekli üretiminde kullanılır.
Her olay yöneticisi kesici grubu içerir ve kesicilerin çeĢitli kaynakları vardır. Olay
yönetici kesicileri, kesici maske kaydedicileri EVxIMRA, EVxIMRB veya
EVxIMRC (x=A veya B) ile bireysel olarak aktif veya pasif edilebilir. Kesici
kaynağı çevresel birim kesme durumu oluĢtuğunda EVxIFRA, EVxIFRB veya
EVxIFRC (x=A or B) kaydedicilerindeki ilgili bayrak bitleri set olur. Eğer kesici
bayrak bitleri ve kesici maske bitleri set ise, çevresel çıkıĢ çevresel kesici PIE
modülüne istemde bulunur. Çevresel birimlerin kesme vektör tablosu iĢlenirken
iĢlemci temel kesmelerinin yetkisiz kılınması gerekir. Bunun için CPU kesmeleri
yetkisiz kılınır ve kesme bayrakları (interrupt flag) temizlenir. Eğer bir bağımsız
zaman kesmesi kullanılacak ve ADC‟nin buna uyması istenirse, zamanlayıcılardan
birisine iliĢkin kesme vektörü ayarlanmalıdır. Ayrıca zamanlayıcının sayaç
durumuna göre kesmenin zamanı da belirlenebilmektedir. Program döngüsü sonunda
da kullanılan kesme vektörüne uygun bayraklar ayarlanır. TIMER1 setlenen sayıcı
değerine göre, sayıcı sıfırlama durumuna göre, sayıcı sonlanma durumuna göre ya da
sayıcı karĢılaĢtırma değerine göre kesme üretebilen bir kesme vektörüne sahiptir.
PWM üretilmesi
Genel amaçlı zamanlayıcı ile PWM çıkıĢını üretmek için, sürekli yukarı veya
yukarı/aĢağı sayım modu seçilebilir. Sürekli-yukarı sayım modu seçildiğinde, kenar
tetiklemeli veya simetrik olmayan PWM dalga Ģekli üretilir. Devamlı-yukarı/-aĢağı
mod seçildiğinde ortalanmıĢ veya simetrik PWM dalga Ģekli üretilir. PWM
üretilirken temel olarak Ģu iĢlemler yapılır; istenen PWM periyodu için TxPR
ayarlanır, baĢlangıç için ve saat kaynağı ve sayma modunu belirtmek için TxCON
ayarlanır ve hesaplanmıĢ PWM darbelerinin geniĢliklerine uygun olarak TxCMPR
yüklenir.
103
Bir PWM sinyalinin peryot değeri, istenen PWM periyodunun genel amaçlı
zamanlayıcı giriĢ saat periyoduna bölünmesi ve sürekli yukarı sayım modunun
simetrik olmayan PWM dalga Ģeklinin üretilmesi için seçili olduğu konumda
sonuçlanan numaradan çıkarılması ile bulunur. Simetrik PWM dalga Ģeklinin
üretilmesinde sürekli yukarı/aĢağı sayım modu seçildiğinden, bu değer istenen PWM
periyodunun iki katı genel amaçlı zamanlayıcı saat giriĢ periyoduna bölümü ile
bulunur. TIMER1 ve EV-A olay yöneticisi kullanılarak yukarı/aĢağı çalıĢma
(Simetrik PWM dalga) kipinde bir PWM iĢareti üretilirse, bu PWM iĢaretinin
frekansı,
f PWM
f CPU
2 T1 per HISCP
(5.24)
eĢitliği ile bulunur. Örneğin TIMER1‟in peryodu 1500 ise (fCPU iĢlemci hızı olup
değeri 150 MHz dir ve HISCP 1 alınırsa), simetrik dalga kipindeki bu PWM
sinyalinin frekansı 50 kHz olur. ĠĢlemcinin zamanlayıcıları ve karĢılaĢtırma mantık
birimi kullanılarak üç-çift bağımsız tümleyenli PWM iĢaretleri üretilir. Aynı hat
üzerindeki anahtarların kısa devre olmasını önlemek amacıyla ölü zaman mantık
birimi de ayarlanır. PWM sinyal üretimi için, sayılan PWM periyodunun aynısını
tekrar eden uygun bir zamanlayıcı gereklidir. KarĢılaĢtırma kaydedicisinin değeri
sürekli olarak zaman sayıcı ile karĢılaĢtırılmaktadır. Değerler uyuĢtuğunda, atanan
çıkıĢta iletim (yüksekten alçağa veya alçaktan yükseğe) gerçekleĢir. Değerlerde
ikinci uyum sağlandığında veya zamanlayıcının periyodunun sonuna ulaĢıldığında
baĢka bir iletim (yüksekten alçağa veya alçaktan yükseğe) atanan çıkıĢta
gerçekleĢmiĢ olur. Böylelikle, çıkıĢ darbesi açık (kapalı) durma zamanı karĢılaĢtırma
kaydedicisi değerine oranlıdır.
Bu süreç karĢılaĢtırma kaydedicisindeki her bir
zamanlayıcı periyot değeri için tekrar eder. Sonuç olarak, PWM sinyali
iliĢkilendirilmiĢ çıkıĢta üretilir. Ayrıca genel amaçlı zamanlayıcılarının da bağımsız
olarak periyot ve karĢılaĢtırma değerleri ayarlanarak, iki-çift tümleyenli PWM iĢareti
daha üretilebilmektedir. Bunlar T1PWM_T1CMP ve T2PWM_T2CMP‟dir.
104
PWM üretiminde kullanılan ölü bant üreteç devresi 4 bit sayıcı ve bir 16 bitlik
karĢılaĢtırma kaydedicisini içerir. Ġstenen ölü bant değerleri, üç karĢılaĢtırma birimi
çıkıĢı için karĢılaĢtırma kaydedicisine programlanabilir. Ölü bant üretimi her bir
karĢılaĢtırma ünitesi için ayrı ayrı olarak aktif veya pasif edilebilir. Ölü bant üreteç
devreleri her bir karĢılaĢtırma ünitesi çıkıĢ sinyali için iki çıkıĢ (ölü bant alanı ile
birlikte ya da birlikte değil) üretir. Ölü bant üreteçlerinin çıkıĢ durumları çiftetamponlanmıĢ ACTRx kaydedicisin sayesinde düzenlenebilir ve değiĢtirilebilir. Güç
elektroniği dönüĢtürücülerinde aynı hatta bağlı anahtarlar biri diğerinden tümleyenli
üretilmiĢ PWM iĢareti ile sürülürse, sürücü iĢaretin düĢen ve yükselen kenarlarında
anahtar hızları yavaĢ kaldığı için üstteki anahtar henüz tıkamaya gitmeden alttaki
anahtar tetiklenmiĢ ve iletime sokulmaya zorlanmıĢ olur. Bu durumda besleme hattı
bu anahtar grubu tarafından kısa devre olur ve anahtarlar da kısa devre akımından
etkilenerek zarar görürler. Bu yüzden, ölü zaman üreteçli PWM çıkıĢı iki anahtarın
uygun bir Ģekilde açma ve kapama yapmasını gerekli kılar. Ölü zaman (ölü bant)
anahtarın kesime giderken bir diğerinin iletime geçmesi arasına eklenir. Bu gecikme
bir transistorün diğeri açılmadan önce tamamı ile kapanmasına izin verir.
Önerilen SGG sarmaĢık yükselten GKD devresindeki gecikme süresi (td)
TMS320F2812 iĢlemcisinin ölü zaman özelliğinden yararlanarak elde edilmiĢtir.
ġekil 5.10‟da aktarılan grafik önerilen devrede kullanılan ve DSP‟den üretilen PWM
dalga Ģeklidir. Önerilen devre sarmaĢık yükselten devre olduğundan 1800 faz farklı
PWM sinyallerinin elde edilmesi gerekir. Bunu elde etmek için DSP‟nin iki farklı
zamanlayıcısı (TIMER1 ve TIMER3) kullanıldı (TIMER3 sayıcısı TIMER1
sayıcısından baĢlangıçta bir peryot gecikmeli baĢlatıldı). ġekil 5.10‟dan görüldüğü
üzere, önerilen devre için gerekli bütün PWM sinyalleri DSP‟den üretilmektedir.
DSP kesicileri (interrupt) her bir zamanlayıcı peryodunda etkinleĢtirilmektedir. ADC
modulü her kesicide devreye ait akım ve gerilim bilgilerini örnekleyecek Ģekilde
ayarlanmıĢtır. Simetrik PWM dalga Ģeklinde, PWM peryodu (dolayısıyla
anahtarlama peryodu) zamanlayıcı peryodunun iki katı olduğundan, ADC
örneklemesi her bir PWM peryodunda iki kez devreye girmektedir.
105
CMPR
eĢleĢtirme
TIMER1
Periodu
PWM1
Periodu
T1CNT
CMPR1
PWM1
PWM2
dt
PWM3
M1
PWM4
T3CNT
CMPR3
PWM7
PWM8
M2
PWM10
Ma
ig,
Vg,
Vo
ig,
Vg,
Vo
ig,
V g,
Vo
yükle
yükle
yükle
Ölü zaman
(gecikme zamanı)
Kesiciler
(Interrupt)
ġekil 5.10. Önerilen devre için kullanılan DSP‟den üretilen PWM sinyalleri
(PWM2 XOR PWM4)
OR
(PWM8 XOR PWM10)
PWM9
106
Önerilen devrenin uygulama çalıĢmasında her bir PWM peryodu 20 μsn
(anahtarlama frekansı 50 kHz) olarak ayarlandığından, ADC 10 μsn de bir örnekleme
almıĢ oluyor. ADC modülü her örneklemede gerekli olan üç sinyali okuyacak Ģekilde
ayarlandı. ADC‟den alınan bilgiler GKD kontrolcüsü tarafından iĢlenerek önerilen
devrenin anahtarlaması için bir tane görev çarpanı bilgisi üretir. GKD kontrolünden
çıkan bu görev çarpanı anında CMPR1 ve CMPR3‟e yüklenerek PWM sinyalleri
üretilir.
5.3.2. Sinyal örnekleme devresi
Güç devresinden alınan akım ve gerilimler, izoleli elemanlar kullanılarak DSP ADC
sinyal seviyesine indirgenmektedir. DoğrultulmuĢ akım LEM firmasının üretmiĢ
olduğu LA 55-P akım dönüĢtürücüsü (ġekil 5.11) kullanılarak, çıkıĢ ve giriĢ
gerilimleri ise yine aynı firmanın üretmiĢ olduğu LV 25-P gerilim dönüĢtürücü (ġekil
5.12) elemanı kullanılarak örneklenmiĢtir. LA 55-P akım dönüĢtürücü ve LV 25-P
gerilim dönüĢtürücü elemanları ±15 V ile beslenen ve güç devresi ile kontrol devresi
arasında izolasyon sağlayan malzemelerdir. Her iki malzemenin de, ±15 V ile
beslenmesi kontrol devresinin besleme kısmında kolaylık sağlar. Bu çalıĢma
akademik bir çalıĢma olduğundan (ticari amaçlı değildir), güç devresi ile DSP
arasında izolasyon sağlanarak DSP kartının olası kısa devre arızalarına karĢı
korunması amaçlanmıĢtır. Bu nedenle, güç devresi akım ve gerilimleri dirençler
üzerinden değil de izoleli dönüĢtürücüler üzerinden örneklenmiĢtir. Bilindiği gibi,
gerilim ve akım bilgilerinin dirençler ile örneklenmesi çok basit ve ucuz bir
yöntemdir.
+15
-15
is1
ig
LA 55-P
1:1000
Rmi
R1
TL
072
ADCINA0
Gnd_2
ġekil 5.11. LA 55-P akım dönüĢtürücü devresi
DSP
GiriĢi
107
Rg
+ 33k
Vg
-
+15
-15
is2
R1
M
TL
072
Rmg
LV 25-P
ADCINA1
DSP
GiriĢi
2500:1000
Gnd_2
Gnd_1
a-)
Ro
+ 47k
Vo
-
+15
-15
is3
M
Rmo
LV 25-P
R1
TL
072
ADCINA2
2500:1000
DSP
GiriĢi
Gnd_2
Gnd_1
b-)
ġekil 5.12. LV 25-P gerilim dönüĢtürücü devreleri
LA 55-P akım dönüĢtürücü elemanı, primer tarafına sarılmıĢ iletkenden geçen akımı
elektriksel bağlantı olmadan 1:1000 oranında çıkıĢa yansıtır. LV 25-P gerilim
dönüĢtürücü ise, primer tarafına uygulanan gerilimin akım sinyalini bir direnç
üzerinden alır ve bunu çıkıĢa 2500:1000 oranında yansıtır. Görüldüğü üzere
kullanılan her iki malzeme de çıkıĢlarında akım bilgisi verir. Bu akım bilgilerinin
gerilime dönüĢtürülerek DSP‟ye aktarılması gerektiğinden dönüĢtürücülere paralel
dirençler kullanılır. ġekil 5.11 ve 5.12‟de aktarılan ve dönüĢtürücülere paralel
kullanılan Rmi, Rmg ve Rmo direnç değerleri sırasıyla 100 Ω, 50 Ω ve 100 Ω olup,
örnekleme elemanlarının sağlamıĢ olduğu akım sinyalinin gerilim bilgisine
dönüĢtürülmesi için kullanılmaktadır. Devrelerde kullanılan Op-Amp‟lar ise
örnekleme devreleri ile DSP arasında tampon (buffer) görevi yapar. Örnekleme
devrelerinden elde edilerek DSP ADC uçlarına aktarılan sinyallerin devre
parametreleri cinsinden eĢitlikleri aĢağıda aktarılmıĢtır.
V ADCINA0
N ig
Rmi
1000
(5.25)
108
EĢ. 5.25‟te kullanılan N, LA 55-P akım dönüĢtürücüsünün primerinden geçirilen
iletkenin sarım oranıdır.
V ADCINA1
Vg 2500
Rmg
Rg 1000
(5.26)
V ADCINA2
Vo 2500
Rmo
Ro 1000
(5.27)
5.3.3. Sürücü devresi
DSP kartının PWM çıkıĢları 0-3 V seviyesinde olduğundan, güç devresindeki
anahtarların sürülmesi için bu 0-3 V seviyesindeki sinyaller sürücü devresi
vasıtasıyla yükseltilmesi gerekir. ġekil 5.13‟te görüldüğü gibi, sürücü devresinde
MOSFET sürücü entegrelerinin haricinde 6N137 entegreleri de kullanılmıĢtır. 6N137
entegrelerinin kullanım amacı DSP ile güç devresi arası izolasyonu sağlamaktır.
MOSFET sürücüsü olarak IXDD414 PI entegresi kullanılmıĢtır.
PWM1
6N137
CD4016
BM
IXDD414
PI
Opto sensör
Schmitt
MOSFET
Sürücü
M1
ġekil 5.13. DSP ile güç devresi arasında kullanılan sürücü devresi
5.3.4. Kontrol parametrelerinin belirlenmesi
Kontrol
parametrelerinin
belirlenmesinde,
ġekil
5.7‟de
verilen
semboller
kullanılacaktır. Ortalama akım kontrollü yükselten devrenin kontrol tasarımı ile ilgili
literatürde yeterince çalıĢma mevcuttur [30], [55]. Bu bölümde, literatürde mevcut bu
çalıĢmalardan yararlanarak ortalama akım kontrolünde kullanılan kontrolcülerin
katsayılarının belirlenmesi aktarılmıĢtır. ġekil 5.7‟de görüldüğü gibi, güç devresine
109
ait akım ve gerilimlere ait sinyaller Ki, Kg ve Ko blokları ile DSP‟ye alınmaktadırlar.
GKD kontrolcüsünün iç döngüsü, akım referansına göre (ig,ref) Uc çıkıĢı veren akım
kontrolcüsüdür (Gi). Akım kontrolcüsü dönüĢtürücü akımının üretilen akım
referansını takip edecek Ģekilde tasarlanmalıdır. GKD kontrolcüsünün dıĢ döngüsü,
gerilim referansına göre (Vo,ref) A çıkıĢı üreten gerilim kontrolcüsüdür (Gv). Gerilim
kontrolcüsü dönüĢtürücü çıkıĢ geriliminin belirlenen gerilim referansını takip edecek
Ģekilde
tasarlanmalıdır.
GKD
kontrolcüleri
DSP
içerisinde
dijital
olarak
tasarlandığından, öncelikle DSP‟de iĢlenen sinyallerin seviyesi belirlenmesi lazım.
Önerilen devrenin giriĢ gerilim ve giriĢ akım değerleri zamanla değiĢen sinüzoidal
sinyaller olduğundan ġekil 5.7‟de kullanılan katsayılar hesaplanırken bu sinüzoidal
sinyallerin tepe değerleri dikkate alındı. Güç devresinin sinyalleri LV 25-P gerilim
ve LA 55-P akım dönüĢtürücüleri kullanılarak elde edildi. GiriĢ gerilimi (Vg) için Rmg
50 Ω, çıkıĢ gerilimi (Vo) için Rmo 100 Ω ve giriĢ akımı (ig) için Rmi 100 Ω
kullanıldığından; Kg, Ko ve Ki katsayıları;
Kg
ADCINA1
Vg
(V g / 33000 ) 2.5 50
Ko
ADCINA 2
Vo
(Vo / 47000 ) 2.5 100
Vo
Ki
ADCINA0
ig
2 i g 100
i g 1000
Vg
0.2
0.00378
0.005319
(5.28)
(5.29)
(5.30)
eĢitlikleri ile hesaplanır. Güç devresinin akım ve gerilimlerinin tepe değerleri (600 W
çıkıĢ gücü düĢünülerek) alınsa bile, bu katsayılar ile çarpımlarından 3 V gerilim
seviyesi (DSP ADC‟sine uygun tepe değer) aĢılmamaktadır. DSP içerisinde
kullanılan katsayılardan B ve C2 EĢ. 5.31 ve 5.32 ile ifade edilirken, A gerilim
kontrolcüsü çıkıĢ sinyali değeridir.
110
B
C2
(5.31)
K i Vg
K m V g2, ort
(5.32)
GKD kontrolcüsünün çarpım bloğunda kullanılan C2 katsayısı doğrultulmuĢ
gerilimin etkin değerine bağlıdır. Bir gerilim sinyalinin etkin değeri ortalama değeri
ile doğrudan bağlantılı olduğundan, doğrultulmuĢ gerilimin ortalama değeri alınarak
Km gibi bir katsayı ile çarpılmıĢtır. DSP gibi sayısal iĢlemcilerde sinyallerin ortalama
değerinin elde edilmesi kolay olduğu için bu yöntem kullanılmaktadır. ġekil 5.7‟den
akım kontrol döngüsü kazancı (Ti) EĢ. 5.33 ve kontrolcü kazancı ise EĢ. 5.34 ile
yazılabilir [56].
Ti
Gi
Gid Ki Gi Fm
2
1/(2
fz )
f ci L
K i Vo
(5.33)
(5.34)
burada, fz akım kontrol döngüsü transfer fonksiyonunun sıfır frekansını ve fci ise köĢe
frekansını ifade eder. PWM modülatör kazancı (Fm), güç devresine uygulanan görev
çarpanının akım kontrolcüsünden elde edilen değere (Uc) oranıdır (EĢ. 5.35).
Fm
d
Uc
(5.35)
Güç devresi ile akım döngüsü arasındaki bağıntıyı (Gid), yüksek frekansta
kondansatörün etkisini ihmal edersek (1/sCo=0), EĢ. 5.36 ile ifade edebiliriz.
Gid
Vo
sL
(5.36)
111
Akım döngüsündeki katsayılar belirlendikten sonra, gerilim döngüsü ile güç devresi
arasındaki ifade (Gvd), gerilim döngüsü kazancı (Tv) ve kontrolcü kazancı;
Tv
Gvd K o Gv
Gvd
Gv
Vo
A
1/(2
Km
2 K g Ki
(5.37)
f cv )
V g , min
2
V g , max
2 K g Ki
V g , max
Ko Km
V g , min
2
Zf
(5.38)
Vo
Vo
(5.39)
Z f f f cv
eĢitlikleri ile ifade edilir. Burada, fcv gerilim kontrol döngüsü transfer fonksiyonunun
köĢe frekansını ifade eder. Zf ise çıkıĢ kondansatörü dahil yükün tamamını ifade eder.
Zf çıkıĢ yükünü EĢ. 5.40‟daki gibi alabiliriz.
Z f f f cv
Önerilen
1
1 / Ro 1 / Z L
GKD
Z Co
devresinin
2
1
f cv Co
kontrolcüleri
klasik
(5.40)
PI
(Proportional-Integral)
kontrolcüleri olduğundan, yukarıda kazanç katsayıları belirlenen akım ve gerilim
kontrolcüleri aĢağıda PI gösterimi Ģeklinde aktarılabilir.
Gv ( s )
Gv
1 Tv s
s Tv
Gi ( s)
Gi
1 Ti s
s Ti
K P1
K P2
K I1
s
(5.41)
KI2
s
(5.42)
112
burada, KP1 ve KI1 gerilim kontrolcüsünün, KP2 ve KI2 ise akım kontrolcüsünün
katsayıları olarak kullanılmıĢtır. Çizelge 5.3‟te aktarılan değerler kullanılarak GKD
kontrolcülerine ait katsayılar belirlenebilir.
Çizelge 5.3. GKD kontrolcülerin belirlenmesinde kullanılan değerler
Parametre
Değeri
ÇıkıĢ gücü, Po
600 W
GiriĢ gerilim tepe değeri, Vg,max
320 V
GiriĢ gerilim minimuum değeri,
320 V
ÇıkıĢ
Vg,min gerilimi, Vo
400 V
Anahtarlama frekansı, fs
50 kHz
Örnekleme süresi, Ts
10 μsn
Endüktör değeri, L
900 μH
ÇıkıĢ kondansatör değeri, Co
470 μF
Gerilim kontrolcü köĢe frekansı, fcv
10 Hz
Akım kontrolcü köĢe frekansı, fci
5 kHz
Akım kontrolcü sıfır frekansı, fz
800 Hz
Yukarıda aktarılan eĢitliklerde Çizelge 5.3‟teki değerler kullanılırsa, Gv(s) ve Gi(s)
kontrolcüleri EĢ. 5.43 ve 5.44‟te aktarılan katsayılarla ifade edilir.
Gv (s)
0,9
Gi ( s)
0,85
1 18 x10 3 s
18 x10
3
0,9
s
1 105 ,98 x10 6 s
105 ,98 x10 6 s
50
s
0,85
(5.43)
8020
s
(5.44)
EĢ. 5.43 ve 5.44‟ten, Çizelge 5.3‟te verilen değerler için elde edilen GKD
kontrolcüleri için; KP1 = 0,9; KI1 = 50; KP2 = 0,85 ve KI2 = 8020 katsayıları elde
edilir. Belirtilen katsayılarla elde edilen gerilim ve akım kontrolcülerin Bode
çizimleri sırasıyla ġekil 5.14 ve 5.15‟te verilmiĢtir. ġekil 5.14‟ten, gerilim
113
kontrolcüsünün köĢe frekansının 10-15 Hz arası ve faz marjininin 30° civarında
olduğu görülmektedir. ġekil 5.15‟te ise, akım kontrolcüsünün düĢük frekanstaki
kazancının yaklaĢık 40dB olduğu, köĢe frekansının 3 kHz civarında ve faz marjininin
ise yaklaĢık 30° olduğu görülmektedir.
Bode Diagram
50
Magnitude (dB)
40
30
20
10
0
Phase (deg)
-10
0
-45
-90
-1
10
0
10
1
10
2
10
10
Frequency (Hz)
ġekil 5.14. Gerilim kontrolcüsü bode çizimi
Bode Diagram
50
Magnitude (dB)
40
30
20
10
0
-10
Phase (deg)
0
-45
-90
1
10
2
10
3
10
Frequency (Hz)
ġekil 5.15. Akım kontrolcüsü bode çizimi
4
10
10
5
3
114
ÇalıĢmada GKD kontrolü için DSP kullanıldığından kontrolcülerin ayrık zamanda
ifade edilmesi gerekir. EĢ. 5.45 ile verilen U(s) giriĢine ve E(s) çıkıĢına sahip s
gösterimindeki bir PI kontrolcüsüne ters dönüĢüm uygulanırsa, t gösterimi EĢ.
5.47‟deki gibi olur.
G ( s)
Us
Es
KI
s
KP
1
(5.45)
K I Ts
u (t )
e(t ) K P
u(t )
K P e(t ) e(t 1)
1 z 1
u(t 1) K I Ts e(t )
(5.46)
(5.47)
EĢ. 5.47‟de görüldüğü üzere, PI kontrolcüleri ayrık zamanda ifade edilirken integral
katsayıları Ts örnekleme zamanı ile çarpılır. Önerilen devrenin kontrolcülerine ait
katsayılar belirlendikten sonra, kontrolcü tasarımı hem benzetim çalıĢmasında hem
de uygulama çalıĢmasında yukarıda aktarıldığı gibi ayrık zamanda ifade edilmiĢtir.
115
6. ÖNERĠLEN SGG SARMAġIK YÜKSELTEN GKD DEVRESĠNĠN
BENZETĠM ÇALIġMASI SONUÇLARI
Bu bölümde, önerilen ortalama akım kontrollü sarmaĢık yükselten GKD devresinin
SIMPLORER programı (Ansoft firması tarafından geliĢtirilen) kullanılarak yapılan
benzetim çalıĢmalarına ait sonuçlar aktarılmıĢtır. Benzetim çalıĢmalarında, tasarım
sonucu elde edilen ve uygulama devresinde de kullanılan değerler kullanılmıĢtır.
Programda
kullanılan
MOSFET‟ler
ve
diyotlar
gerçek
değerlerine
yakın
modellenmiĢtir. Endüktör, kondansatör ve direnç gibi pasif devre elemanları ise
programda mevcut ideal devre elemanlarından seçilmiĢtir. Devrenin kontrolü dijital
olduğundan, uygulamada kontrolcü olarak kullanılan DSP‟nin ilgili modülleri
benzetim programında modellenmiĢtir. DSP‟nin ADC örnekleme süresi, PWM
modülü ve programlama mantığı Simplorer programında mevcut bloklar (ġekil 6.1)
ile tasarlanmıĢtır. Özellikle güç elektroniği uygulamaları için geliĢtirilen Simplorer
programı içerdiği denklem blokları (EQUBL) vasıtasıyla geniĢ bir çalıĢma alanı
sağlamaktadır. Simplorer programının içerdiği bloklar (ġekil 6.2) analog veya dijital
olarak alınan sinyallerin kod yazılarak iĢlenmesini sağladığı için DSP gibi sayısal
iĢlemcilere ait birimlerin modellenmesi imkanı da sağlar. Program benzetim
çalıĢmalarına ait sonuçları grafik pencerelerinde izleme imkanı sağladığı gibi farklı
araçlar (tools) ile analitiksel analiz imkanı da sağlar. Özetle, Simplorer programı güç
elektroniği uygulamaları için geliĢtirilmiĢ ve içeriğinde devre elemanları temelli
uygulama imkanı ile birlikte kod yazma imkanı da sağladığından, önerilen devrenin
benzetim çalıĢmalarında tercih edilmiĢtir.
Benzetim programında GKD devresi için tasarlanan kontrolcüler, ilgili katsayılar,
fark alıcı devreler, çarpıcı v.b. iĢlemler EQUBL bloğunun içerisinde iĢlenmiĢtir.
Önerilen devrenin PWM sinyallerinin üretilmesi ise programın içeriğinde mevcut
devre elemanları ile yapılmıĢtır. Uygulamada olduğu gibi benzetim çalıĢmasında da
güç devresine ait sinyaller 10 μsn ile örneklenmektedir. Benzetim programının adım
aralığı 100 nsn olarak ayarlanmıĢtır.
116
ġekil 6.1. Ortalama akım kontrollü önerilen SGG sarmaĢık yükselten GKD
devresinin Simplorer benzetim diyagramı
ġekil 6.2. Simplorer benzetim programının EQUBL modülü
220 V ve 110 V etkin Ģebeke gerilimi değerleri için yapılan benzetim çalıĢmalarında
kullanılan devre parametreleri Çizelge 6.1‟de verilmiĢtir. Önerilen devrenin GKD
117
kontrolcüsü ön-besleme içerdiğinden hem 220 V hem de 110 V etkin Ģebeke
geriliminde aynı kontrolcü katsayıları kullanıldı.
Çizelge 6.1. Benzetim çalıĢmalarında kullanılan parametreler
Parametre
Değeri
SarmaĢık Yükselten GKD Devre Parametreleri
ÇıkıĢ gücü, Po
600 W
GiriĢ Ģebeke gerilimi, Vin
110-220 V_rms
ġebeke gerilimi, f
50 Hz
Ortalama çıkıĢ gerilimi, Vo
400 V
Anahtarlama frekansı, fs
50 kHz
Endüktörler, L1, L2
700 μH
ÇıkıĢ kondansatörü, Co
470 μF
GiriĢ gürültü kondansatörü, Cg
0,47 μF
Ana anahtarlar, M1, M2
IRFP460
Ana diyotlar, Do1, Do2
DSEI 30-12A
Yardımcı Devre Parametreleri
Yardımcı devre endüktörü, Lr
15 μH
Yardımcı devre kondansatörü, Cr
10 nF
Yardımcı devre kondansatörü, Cs
2,2 nF
Yardımcı anahtar, Ma
IRFP450
Yardımcı devre diyotları, D1, D2, D3, D4
UF5408
GKD Kontrolcü Parametreleri
KP1; KI1; KP2; KI2
Örnekleme süresi, Ts
12; 300; 0,5; 4500
10 μs
SarmaĢık yükselten GKD devresi için önerilen SGG yumuĢak anahtarlama
yönteminin en kötü Ģartlarda SGG koĢulunu sağlaması gerekir. GKD devrelerinin
çıkıĢ gerilimi sabit olduğundan, koĢulların giriĢ gerilim değiĢiminde (dolayısıyla giriĢ
akım değiĢimlerinde) oluĢtuğu EĢ.5.21 ile aktarılmıĢtı. GiriĢ akımının en yüksek
değeri, SGG için gerekli azami gecikme süresini belirlemekte ve en kötü koĢulu
118
oluĢturmaktadır. GiriĢ akımının tepe değerinin tasarımı yapılan dönüĢtürücünün
maksimum çıkıĢ gücünde ve minimum giriĢ geriliminin tepe değerinde oluĢtuğu daha
önce aktarılmıĢtı. Bu nedenle, önerilen SGG yöntemi sarmaĢık yükselten GKD
devresinin 600 W çıkıĢ gücünde ve 110 V etkin giriĢ geriliminde SGG koĢulunu
sağlıyorsa, dönüĢtürücünün diğer koĢullarında da (600 W‟tan düĢük güç değerlerinde
ve 110 V‟tan büyük giriĢ gerilim değerlerinde) bu koĢulu sağlar. ÇalıĢma konusu
olan güç devresi sarmaĢık yükselten devre olduğundan, belirtilen koĢullar hariç görev
çarpanının koĢulları da dikkate alınmalıdır. Bu nedenle, yumuĢak anahtarlama
devresinin davranıĢı, farklı görev çarpanı değerlerinde (hem d<0,5 için hem de d>0,5
için) kaydedilerek sonuçlar aktarılmıĢtır.
GiriĢi gerilimi zamanla değiĢen sinüzoidal dalga Ģekline sahip olduğundan, 220 V
etkin değerin tepe değeri yaklaĢık olarak 310 V‟tur. Daha önce analizlerde aktarıldığı
üzere, giriĢ gerilim değeri çıkıĢ geriliminin yarısına (Vo/2 = 200 V) eĢit oluncaya dek
görev çarpanı 0,5‟ten büyük, çıkıĢ geriliminin yarısından büyük değerlerinde ise
görev çarpanı 0,5‟ten küçüktür. Bu nedenle, 220 V etkin Ģebeke gerilim değerinde
yapılacak benzetim çalıĢmaları ile önerilen SGG yönteminin farklı görev çarpanı
değerlerindeki davranıĢı gözlenmiĢ olacak. 110 V ve 220 V etkin Ģebeke gerilim
değerleri ile elde edilen benzetim çalıĢma sonuçları aĢağıda aktarılmıĢtır.
ġekil 6.3. 110 V ve 220 V etkin giriĢ gerilimlerindeki çıkıĢ gerilimi (Vo = 400 V)
119
Devrenin çıkıĢ gerilim dalga Ģekli ġekil 6.3 ile verilmiĢtir. Hem 110 V hem de 220 V
etkin giriĢ gerilimi değerlerinde çıkıĢ geriliminin dalgacık oranı yaklaĢık 6 V olarak
kaydedildi. GKD kontrolcüsünün referans gerilim değerine bağlı olarak çıkıĢ
gerilimini tasarlandığı gibi 400 V civarında regüle ettiği görülmektedir.
Önerilen devre 110 V etkin giriĢ gerilimi ile çalıĢtırıldığında elde edilen giriĢ gerilim
ve giriĢ akım dalga Ģekilleri ġekil 6.4‟te ve doğrultulmuĢ gerilim ile doğrultulmuĢ
akım dalga Ģekilleri ise ġekil 6.5‟te aktarılmıĢtır. Aynı çıkıĢ güç değeri için, 110 V
giriĢ gerilimi değerinde çekilen akımın oranı arttığından giriĢ akım dalgacık oranı
düĢer. Bu nedenle, 110 V giriĢ geriliminde daha düzgün akım dalga Ģekli elde edilir.
ġekil 6.4. 110 V giriĢ gerilimi ile 5*giriĢ akımı (Vin=110 V_rms ; THBi=%5,1)
ġekil 6.5. DoğrultulmuĢ gerilim-5*akım grafikleri (Vg =110 V_rms ; ig =5,63 A_rms)
120
220 V etkin giriĢ gerilimi kullanılarak önerilen SGG sarmaĢık yükselten GKD
devresinin benzetim çalıĢmaları sonucunda elde edilen giriĢ gerilim ve giriĢ akım
dalga Ģekilleri ġekil 6.6‟da ve doğrultulmuĢ gerilim ile doğrultulmuĢ akım dalga
Ģekilleri ise ġekil 6.7‟de aktarılmıĢtır. 600 W çıkıĢ güç değeri için yapılan bu
çalıĢmada giriĢ akım etkin değeri 2.81 olarak kaydedilmiĢtir.
ġekil 6.6. 220 V giriĢ gerilimi ile 50*giriĢ akımı (Vin=220 V_rms ; THBi=%8,6)
ġekil 6.7. 220 V doğrultulmuĢ gerilimi ile 50*doğrultulmuĢ akım dalga Ģekilleri
(Vg =220 V_rms ; ig =2,81 A_rms)
ġekil 6.6‟da elde edilen akım dalga Ģeklinde (ġekil 6.4‟te elde edilen ile
karĢılaĢtırılırsa) akımda kırılmaların olduğu ve akımın tepe değerlerinde dalgacık
oranının fazla olduğu görülmektedir. Bunun nedeni, 220 V etkin giriĢ geriliminde,
121
giriĢ gerilim değeri çıkıĢ geriliminin yarısına eĢit oluncaya dek görev çarpanının (d)
0,5‟ten büyük, çıkıĢ geriliminin yarısından büyük değerlerinde ise görev çarpanı
0,5‟ten küçük olmasıdır. Devre faz farklı paralel yükselten olduğundan, görev
çarpanı değeri 0,5 olduğu durumlarda giriĢ akım dalgacık oranı en düĢük düzeyde
olur. Ayrıca, görev çarpanı 0,5‟ten küçük olduğu durumlarda (220 V giriĢ gerilim
değerinin tepe noktalarında) akımın dalgacık oranı artmaktadır. ġekil 6.8‟de, 220 V
giriĢ geriliminde elde edilen endüktör akımları ve doğrultulmuĢ akım (endüktör
akımlarının toplamı) dalga Ģekilleri görülmektedir. ġekilden, her bir endüktörün
akımı eĢit bir Ģekilde paylaĢtığı görülmektedir.
ġekil 6.8. 220 V etkin giriĢ geriliminde elde edilen, doğrultulmuĢ akım ve endüktör
akımları dalga Ģekilleri (ig , iL1 , iL2 )
Devre faz farklı olduğundan, toplam akım dalgacık oranının endüktör akım dalgacık
oranlarından daha az olduğu görülmektedir. Toplam akım ile endüktör akımlarının
dalgacık oranları arasındaki farkı daha iyi görmek için ġekil 6.8‟deki grafiğin zaman
ekseni küçültülerek ġekil 6.9 ve ġekil 6.10 elde edildi. ġekil 6.9‟da görev çarpanının
(d) 0,5‟ten küçük olduğu durumdaki (giriĢ geriliminin tepe noktaları) akımların dalga
Ģekilleri gösterilirken, ġekil 6.10‟da görev çarpanının (d) 0,5‟ten büyük olduğu
durumdaki (giriĢ geriliminin dip noktaları) akımların dalga Ģekilleri gösterilmiĢtir.
ġekil 6.9‟dan, endüktör akım dalga Ģekillerinde kırılmalar olduğu görülmektedir.
Görev çarpanının 0,5‟ten küçük olduğu durumlarda oluĢan bu kırılmalar SGG‟den
kaynaklıdır. Bir anahtar (örneğin M1) kesimde iken endüktör akımı zamanla azalır,
122
fakat yardımcı anahtar diğer anahtar (örneğin M2) için devreye girdiğinde her iki güç
katının endüktörlerinden de akım çeker. Bu nedenle, kesimde olan anahtarın güç
katından yardımcı anahtarın devreye girdiği süre kadar artan bir akım çekilir. GiriĢ
gerilimin tepe noktalarında oluĢan bu durum devrenin çalıĢma karakteristiğini
etkilemediği gibi giriĢ akım dalgacık oranının daha da azalmasını sağlar.
SarmaĢık yükselten GKD devrelerinin en önemli sorunu endüktör akımlarının eĢit
paylaĢımıdır. Görüldüğü üzere, görev çarpanının her iki durumunda da endüktörler
giriĢ akımını eĢit paylaĢmakta ve giriĢ akım dalgacık oranını düĢürmektedir.
ġekil 6.9. d<0,5 için doğrultulmuĢ ve endüktör akımları dalga Ģekilleri (ig , iL1 , iL2 )
ġekil 6.10. d>0,5 için doğrultulmuĢ ve endüktör akımları dalga Ģekilleri (ig , iL1 , iL2 )
123
Önerilen SGG yönteminin sarmaĢık yükselten GKD devresindeki ana anahtarlar
üzerindeki etkisini görmek için, devrede kullanılan MOSFET‟lerin gerilim ve akım
dalga Ģekilleri incelendi. ġekil 6.11 ve 12‟de, görev çarpanının (d) 0,5‟ten büyük
olduğu durumda ana anahtarların (M1 ve M2) gerilim ve akım grafikleri aktarılmıĢtır.
Görev çarpanı 0,5‟ten büyük ise, her hangi bir anahtar iletimdeyken diğer ana
anahtar da iletime geçmektedir. Her ana anahtardan önce yardımcı anahtar (Ma)
devreye girdiğinden, SGG için belirlenen gecikme süresi kadar (yardımcı anahtar
görev çarpanı süresince) her iki ana anahtarın gövde diyotlarından akım geçmektedir.
Bu durum ġekil 6.11‟de açıkça görülmektedir.
ġekil 6.11. d>0,5 için M1 ana anahtarın gerilim-akım dalga Ģekilleri (VDSM1, 20*iD,M1)
ġekil 6.12. d>0,5 için M2 ana anahtarın gerilim-akım dalga Ģekilleri (VDSM2, 20*iD,M2)
124
ġekil 6.13 ve 14‟te, görev çarpanının (d) 0,5‟ten küçük olduğu durumda ana
anahtarların (M1 ve M2) gerilim ve akım grafikleri aktarılmıĢtır. Görev çarpanı
0,5‟ten küçük ise, her hangi bir anahtar kesimdeyken diğer ana anahtar iletime
geçmektedir. Yardımcı anahtar devreye girdiği zaman kesimde olan anahtarın da
gövde diyodundan akım geçmektedir. ġekil 6.13 ve 14‟te açıkça görülen bu durum,
kesimde olan anahtarda anahtarlama kaybı oluĢturmamaktadır. Nedeni ise, gövde
diyodunda akım geçerken anahtar terminallerinde oluĢan gerilim değeri diyodun
iletim değeri olan 1 V düzeyindedir.
ġekil 6.13. d<0,5 için M1 ana anahtarın gerilim-akım dalga Ģekilleri (VDSM1, 20*iD,M1)
ġekil 6.14. d<0,5 için M2 ana anahtarın gerilim-akım dalga Ģekilleri (VDSM2, 20*iD,M2)
125
Önerilen yöntem ile ana anahtarlarda SGG koĢulunun sağlandığı görüldü. Ana
anahtarların kayıpları düĢürülürken, kullanılan yardımcı devre ile farklı kayıplara yol
açmamak önemlidir. Bu nedenle, farklı görev çarpanı değerlerinde yardımcı
anahtarın gerilim-akım grafiklerinin incelenmesi gerekir.
ġekil 6.15. d>0,5 için Ma yardımcı anahtarın gerilim-akım dalga Ģekilleri (VDSMa,
20*iD,Ma)
ġekil 6.16. d<0,5 için Ma yardımcı anahtarın gerilim-akım dalga Ģekilleri (VDSMa,
20*iD,Ma)
ġekil 6.15‟te görev çarpanının 0,5‟ten büyük olduğu durumda, ġekil 6.16‟da ise,
görev çarpanının 0,5‟ten küçük olduğu durumda, yardımcı anahtarın (Ma) gerilim ve
akım grafikleri aktarılmıĢtır. Görüldüğü üzere, her iki durumda da, yardımcı anahtar
126
yumuĢak anahtarlama ile anahtarlanmaktadır. Ayrıca, yardımcı devrede kullanılan
diyotların akım ve gerilim dalga Ģekilleri incelendiğinde, akım veya gerilim
osilasyonlarının olmadığı ve diyotların ters akım kayıplarının olmadığı gözlenmiĢtir.
Bu durumda, kullanılan yardımcı devrenin kayıplarının oldukça az olduğu
söylenebilir. Temel olarak, yardımcı devrenin kayıplarını, kullanılan yarıiletkenlerin
iletim kayıpları (anahtarlama kayıplarına oranla oldukça düĢük) ve pasif elemanların
iç dirençlerinden kaynaklı kayıplar olarak ifade edebiliriz. ġekil 6.17‟de yarımcı
devrede kullanılan Lr endüktörünün akımı ile Cr kondansatörünün gerilim grafikleri
aktarılmıĢtır. Görüldüğü üzere, endüktör akımı kondansatör gerilimini arttırarak
düĢmeye baĢlar. Yani, yardımcı devre analizinde de bahsedildiği gibi, devrede
endüktöre depolanan enerji önce kondansatöre transfer edilir daha sonra ise çıkıĢa
aktarılır.
ġekil 6.17. Cr kondansatör gerilimi ve 10*Lr endüktör akımı dalga Ģekilleri (VCr,
10*iLr)
Yapılan benzetim çalıĢmalarında çıkıĢ yük olarak direnç alındı. Literatür
çalıĢmalarından, yük fark etmeksizin GKD devrelerinin iĢlevini yerine getirdiğini
bilmekteyiz. GKD devreleri bir ön düzenleyici devre olduğundan çıkıĢ yükleri
rezistif olabileceği gibi, DA/DA veya DA/AA gibi anahtarlamalı devreler de olabilir.
Yükün özelliği değiĢse bile GKD devresi görevini yerine getirmesi gerekir. Bu
nedenle, önerilen devrenin benzetim çalıĢmaları rezistif yük için tamamlandıktan
sonra, çıkıĢa elektronik bir yük bağlanarak devrenin davranıĢı incelendi. Elektronik
127
yük olarak devrenin çıkıĢına direnç yerine DA/DA düĢüren tip bir devre bağlandı.
DüĢüren tip devresi için 400 V gerilimini 200 V gerilim seviyesine düĢürecek Ģekilde
bir gerilim kontrolcüsü tasarlandı. Önerilen devrenin çıkıĢına elektronik yük
bağlanarak elde edilen benzetim çalıĢması sonuçları ġekil 6.18 ve 6.19‟da
aktarılmıĢtır. Elektronik yük için yapılan benzetim çalıĢmasından, Çizelge 6.1‟de
aktarılan parametreler kullanılmıĢtır.
ġekil 6.18. Elektronik yük kullanılarak elde edilen; SGG sarmaĢık yükselten GKD
devresi çıkıĢ gerilimi (Vo), elektronik yük çıkıĢ gerilimi (Vo1), giriĢ
gerilimi (Vin) ve 10*giriĢ akımı (10*iin) dalga Ģekilleri
ġekil 6.19. Elektronik yük kullanılarak elde edilen; elektronik yük giriĢ akımı (iLoad1)
ve GKD giriĢ akımı (mavi, iin) dalga Ģekilleri
ġekil 6.18 ve 6.19‟da aktarılan sonuçlardan, önerilen GKD devresinin çıkıĢ gerilimi
(400 V) elektronik yük çıkıĢında 200 V‟a düĢürülmektedir. Elektronik yükten dolayı
GKD çıkıĢından çekilen akım sabit olmayıp kesintilidir. Görüldüğü üzere, çıkıĢ
yükümüzün özelliği değiĢse de, GKD devresi iĢlevini yerine getirmekte ve giriĢte
128
yüksek güç katsayılı giriĢ gerilimini takip eden akım çekilmesini sağlamaktadır.
Ayrıca, önerilen devrenin anahtar gerilim ve akım dalga Ģekilleri incelendiğinde,
rezistif yükte olduğu gibi SGG koĢulunun sağlandığı gözlenmiĢtir.
Yapılan literatür araĢtırmasında, GKD devreleri tasarlanan güç değerlerinden daha
düĢük değerlerde çalıĢtırıldığı taktirde giriĢ akım THB değerlerinin arttığı
görülmektedir. Ayrıca, bir cihaz düĢük güçlerde çalıĢtırılırken THB değerinin
artmasına karĢın IEEE standardında dikkate alınan TDD değerinin düĢtüğü
bilinmektedir. Bu durum cihazı kullanan tüketici lehinedir. DüĢük güçlerde THB
değerinin arttığını gözlemlemek için, 600 W olarak tasarlanan devrenin 100 W‟ta
benzetim çalıĢması yapılarak THB sonucu gözlemlendi. ġekil 6.20‟de, önerilen
devrenin 100 W güç değerindeki benzetim çalıĢması sonucu aktarılmıĢtır. Önerilen
devrenin 600 W değerindeki sonucunda (ġekil 6.6) %8.6 oranında THB elde
edilirken, aynı devrenin 100 W güç değerindeki sonucundan (ġekil 6.20) %15.2
oranında THB değeri gözlenmiĢtir. Bu da, tasarlanan GKD devreleri nominal
güçlerinin altındaki güç değerlerinde çalıĢtırıldıklarında daha yüksek THB içeren
akımlar çaktiğini göstermektedir.
ġekil 6.20. Devrenin 100 W‟taki Vin ve 200*Iin grafikleri (THBi=%15,2)
Benzetim çalıĢmaları tamamlandıktan sonra, burada kullanılan parametreler ile
önerilen devrenin prototipi tasarlanmıĢ ve uygulama çalıĢmaları yapılmıĢtır. Bir
sonraki bölümde önerilen devrenin uygulama çalıĢmalarından elde edilen sonuçlar
aktarılmıĢtır.
129
7. ÖNERĠLEN SGG SARMAġIK YÜKSELTEN GKD DEVRESĠNĠN
DENEYSEL ÇALIġMA SONUÇLARI
Bu bölümde, önerilen ortalama akım kontrollü sarmaĢık yükselten GKD devresinin
prototipi tasarlanarak deneysel çalıĢmaları yapılmıĢ ve ilgili sonuçları aktarılmıĢtır.
Deneysel çalıĢmalarda, tasarım sonucu elde edilen ve benzetim devresinde de
kullanılan Çizelge 6.1‟deki değerler kullanılmıĢtır. Resim 7.1‟de verilen prototip
devrenin kontrolü DSP ile yapılmaktadır. Benzetim çalıĢmalarında olduğu gibi
deneysel çalıĢmalarda da farklı giriĢ gerilim değerleri kullanıldığından, Ģebeke ile
prototip devre arasında varyak kullanılmıĢtır.
Resim 7.1. Ortalama akım kontrollü önerilen SGG sarmaĢık yükselten GKD
devresinin prototipi
Devre kontrollü çalıĢtırılmadan önce, DSP kartı ile ilgili çalıĢmalar tamamlanarak,
DSP‟nin ilgili modülleri ġekil 7.1 ve 7.2‟de verildiği gibi test edilmiĢtir. Ayrıca,
Ģebeke gerilimi ve buna ait harmonik bilgileri kaydedilmiĢtir. Önerilen devrenin
GKD kontrolünde Ģebeke gerilimi akım referansını oluĢturduğundan, ġebeke
geriliminin dalga Ģekli ve harmonik içeriği elde edilecek akımı etkilemektedir. ġekil
7.3 ve 7.4‟te GKD kontrolü uygulanmadan giriĢ gerilim ve akım dalga Ģekilleri
aktarılmıĢtır.
130
ġekil 7.1. TMS320F2812 eZdsp kartının gerçek-zaman (real-time) ikonu kullanılarak
ADC‟den örneklenen sinyallerin gözlenmesi
ġekil 7.2. Önerilen devre için gerekli olan PWM sinyalleri
Herhangi bir kontrol uygulanmadan önerilen devre çalıĢtırıldığında, giriĢten çekilen
akımın dalga Ģekli ve THB oranı Fluke 43B güç analizörü kullanılarak elde edildi.
Fluke 43B güç analizörü cihazın çektiği etkin akıma göre anlık THB değeri hesaplar.
Bu cihaz ile TDD ölçümü yapılamamaktadır. ġekil 7.4‟te görüldüğü gibi GKD
kontrolü uygulanmadığı taktirde klasik dönüĢtürücü yüksek oranda THB değerine
sahip akım (2,035 A etkin değeri için THB oranı %68,9) çekmektedir.
131
ġekil 7.3. Uygulamada kullanılan giriĢ gerilimi ve THB oranı
ġekil 7.4. Önerilen devrenin kontrolsüz çalıĢtırılması durumunda elde edilen giriĢ
akım dalga Ģekli ve giriĢ akım THB oranı (Vin-iin, THBi)
Daha önce de ifade edildiği gibi, SGG için gerekli olan azami gecikme süresi için en
kötü koĢul giriĢ akımının tepe değerinde oluĢmaktadır. GiriĢ akımının tepe değeri ise
maksimum çıkıĢ gücünde ve minimum giriĢ geriliminin tepe değerinde oluĢmaktadır.
Dolayısıyla, önerilen SGG yönteminin sarmaĢık yükselten GKD devresinin 600 W
çıkıĢ gücünde ve 110 V etkin giriĢ geriliminde SGG koĢulunu sağlaması gerekir.
Ayrıca, önerilen SGG yöntemi sarmaĢık yükselten GKD devresine uygulandığından,
farklı görev çarpanı değerlerinde de yumuĢak anahtarlama koĢulunu sağlaması
gerekir. Bu nedenle, deneysel çalıĢmalar benzetim çalıĢmalarında olduğu gibi, hem
110 V hem de 220 V etkin Ģebeke gerilim değerleri için yapıldı.
132
Devrenin deneysel çalıĢmasından elde edilen çıkıĢ gerilim ve çıkıĢ akım dalga
Ģekilleri ġekil 7.5 ile verilmiĢtir. Hem 110 V hem de 220 V etkin giriĢ gerilimi
değerlerinde çıkıĢ geriliminin dalgacık oranı 7,2 V olarak kaydedildi. GKD
kontrolcüsünün referans gerilim değerine bağlı olarak, benzetim çalıĢmasında olduğu
gibi çıkıĢ gerilimini 400 V civarında regüle ettiği görülmektedir.
ġekil 7.5. 110 V ve 220 V etkin giriĢ gerilimlerinde elde edilen çıkıĢ gerilimi ve çıkıĢ
akımı deney sonucu (Vo = 400 V, Io = 1,52 A)
Önerilen devre 110 V etkin giriĢ gerilimi ile çalıĢtırıldığında, elde edilen giriĢ
gerilim-giriĢ akım dalga Ģekilleri ve giriĢ akımının THB oranının osiloskop
(TPS2024) çıktıları ġekil 7.6‟da verilmiĢtir. DoğrultulmuĢ gerilim (Vg)-doğrultulmuĢ
toplam akım (ig) dalga Ģekilleri ve endüktör akımları (iL1, iL2)-toplam akım (ig) dalga
Ģekilleri ise ġekil 7.7‟de aktarılmıĢtır. Görüldüğü üzere, 110 V giriĢ gerilimi
değerinde çekilen akımın oranı arttığından, giriĢ akım dalgacık oranı ve THB değeri
(%5,12) oldukça düĢüktür. Ayrıca, endüktörlerin toplam akımı eĢit paylaĢtığı
görülmektedir. Textronix firmasının üretmiĢ olduğu TPS2024 osiloskobu ile elde
edilen ölçümlerden, giriĢ gerilim ve giriĢ akım dalga Ģekilleri oldukça açık bir Ģekilde
görülmektedir. Önerilen devre ortalama akım kontrollü GKD devresi olduğundan,
giriĢ gerilimi giriĢ akımına referans oluĢturmaktadır. Bu nedenle, giriĢ akım dalga
Ģekli giriĢ gerilimi ile aynı Ģekildedir. GiriĢi geriliminde var olan THB oranı da
düĢünüldüğünde (%3,9, ġekil 7.3‟te verilmiĢti), giriĢ akımı için elde edilen %5,12
oranındaki THB değerinin oldukça iyi olduğu söylenebilir.
133
ġekil 7.6. 110 V etkin giriĢ geriliminde; giriĢ gerilim-giriĢ akım dalga Ģekli ve giriĢ
akım THB oranı (Vin=110 V_rms ; iin=5,83 A_rms ; THBi=%5,12)
ġekil 7.7. 110 V etkin giriĢ geriliminde; doğrultulmuĢ gerilim (Vg)-doğrultulmuĢ
toplam akım (ig) (solda) ve doğrultulmuĢ toplam akım (ig)-endüktör
akımı (iL1) (sağda) dalga Ģekilleri
110 V etkin giriĢ gerilimi ile elde edilen deneysel çalıĢma sonuçları TPS2024
osiloskobunun haricinde Fluke 43B güç analizörü cihazı ile de kaydedildi. Fluke 43B
güç analizörü cihazı Ģebeke frekansındaki gerilim ve akım sinyallerini örnekleyerek,
anlık giriĢ güç, güç katsayısı ve THB oranlarını verir. Fluke 43B ile elde edilen giriĢ
gerilim-giriĢ akım dalga Ģekilleri, giriĢ güç değerleri ile güç katsayısı ve giriĢ
akımının THB oranı ġekil 7.8‟de verilmiĢtir. Görüldüğü üzere, güç analizörü ve
osiloskop ile elde edilen dalga Ģekilleri aynıdır. Osiloskop ile giriĢ akımı için %5,12
oranında THB elde edilirken, Fluke cihazı ile kaydedilen bu değer %5,4‟tür. Bu
aradaki küçük farkın sebebi, ölçü aletlerinin kalibrasyon ayarları ve sinyalleri
örneklerken filtreleme oranları ile açıklanabilir. ġekil 7.8‟den, önerilen devre 605 W
134
çıkıĢ gücünde ve 114 V etkin giriĢ gerilimi ile çalıĢtırıldığında, giriĢten birim güç
katsayısında 640 W aktif güç ve 643 VA görünür güç çekmektedir.
ġekil 7.8. Fluke 43B cihazı ile 110 V etkin giriĢ geriliminde; giriĢ gerilim-giriĢ akım
dalga Ģekli, giriĢ güç katsayısı ve güç değerleri, giriĢ akım THB oranı
220 V etkin giriĢ gerilimi kullanılarak önerilen SGG sarmaĢık yükselten GKD
devresinin 600 W çıkıĢ güç değerindeki deneysel çalıĢmaları sonucunda elde edilen
giriĢ gerilim ve giriĢ akım dalga Ģekilleri ile doğrultulmuĢ gerilim ve doğrultulmuĢ
akım dalga Ģekilleri, ġekil 7.9 ve ġekil 7.10‟da aktarılmıĢtır. 600 W çıkıĢ güç değeri
için yapılan bu çalıĢmada giriĢ akımın etkin değeri 2,85 olarak kaydedilmiĢtir.
Ayrıca, önerilen devre, 300 W çıkıĢ güç değerinde de çalıĢtırılarak giriĢ gerilim ve
akım dalga Ģekilleri kaydedildi. ġekil 7.11‟de verildiği gibi, 300 W güç değerinde de
önerilen devrenin GKD kontrolü sağlanmaktadır.
135
ġekil 7.9. 220 V etkin giriĢ geriliminde; giriĢ gerilim-giriĢ akım dalga Ģekli ve giriĢ
akım THB oranı (Vin=220 V_rms ; iin=3 A_rms ; THBi=%10,5)
ġekil 7.10. 220 V etkin giriĢ geriliminde; giriĢ gerilim (Vin)-doğrultulmuĢ gerilim
(Vg) (solda) ve doğrultulmuĢ gerilim (Vg)-doğrultulmuĢ akım (ig) (sağda)
dalga Ģekilleri
ġekil 7.11. 300 W çıkıĢ güç ve 220 V etkin giriĢ geriliminde; giriĢ gerilim-giriĢ akım
dalga Ģekli ve çıkıĢ gerilim-çıkıĢ akım dalga Ģekli (iin=1,43 A_rms ;
THBi=%10,7)
136
ġekil 7.10‟da elde edilen akım dalga Ģekline bakılırsa, (ġekil 7.7‟de elde edilen ile
karĢılaĢtırıldığında) benzetim çalıĢmasından da elde edildiği gibi, akımda
kırılmaların olduğu ve akımın tepe değerlerinde dalgacık oranının fazla olduğu
görülmektedir. Bunun nedeni, 220 V etkin giriĢ geriliminde giriĢ gerilim değeri çıkıĢ
geriliminin yarısına eĢit oluncaya dek görev çarpanının (d) 0,5‟ten büyük, çıkıĢ
geriliminin yarısından büyük değerlerinde ise görev çarpanı 0,5‟ten küçük olmasıdır.
Devre sarmaĢık yükselten olduğundan, görev çarpanı değeri 0,5 olduğu durumlarda
giriĢ akım dalgacık oranı en düĢük düzeyde olur. Ayrıca, görev çarpanı 0,5‟ten küçük
olduğu durumlarda (220 V giriĢ gerilim değerinin tepe noktalarında) akımın dalgacık
oranı artmaktadır.
220 V etkin giriĢ gerilimi ile yapılan deneysel çalıĢma sonuçları hem 600 W hem de
300 W çıkıĢ güç değerleri için Fluke 43B güç analizörü cihazı ile de kaydedildi.
Fluke 43B ile elde edilen giriĢ gerilim-giriĢ akım dalga Ģekilleri, giriĢ güç değerleri
ile güç katsayısı ve giriĢ akımının THB oranları ġekil 7.12 ve 7.13‟te verilmiĢtir.
Görüldüğü üzere, güç analizörü ve osiloskop ile elde edilen dalga Ģekilleri hemen
hemen aynıdır. 300 W çıkıĢ gücünde, osiloskop ile giriĢ akımı için %10,7 oranında
THB elde edilirken, Fluke cihazı ile kaydedilen bu değer %10,9‟dur. 600 W çıkıĢ
güç değerinde ise, giriĢ akım THB oranı osiloskop ile %10,5, Fluke cihazı ile %9,6
olarak kaydedilmiĢtir. Önerilen devrenin güç katsayısı (gk) değerlerine bakılırsa, her
iki güç değerinde de 0,99‟un üzerinde giriĢ güç katsayısı elde edildiği görülmektedir.
Literatür çalıĢmalarından, GKD devreleri için 0,98‟in üzerindeki güç katsayısı
değerinin iyi olduğu görülmektedir. Bu nedenle, önerilen devrede geniĢ çıkıĢ güç
aralığında giriĢ güç katsayısı değerinin 0,99‟un üzerinde çıkması, tasarlanan GKD
kontrolcüsünün görevini iyi yaptığı anlamına gelir. 110 V etkin giriĢ geriliminde elde
edilen sonuçlar da dikkate alınırsa (110 V giriĢ geriliminde güç katsayısı değeri 1 ve
THB değeri de %5 civarında elde edilmiĢti); giriĢ akımın değeri arttıkça daha düĢük
oranda giriĢ akım THB değeri ve daha yüksek oranda güç katsayısı değeri elde
edildiği görülmektedir. Bunun nedeni, giriĢ akımın oranı arttıkça endüktör
akımlarının dolayısıyla giriĢ akımın dalgacık oranı azalmaktadır.
137
ġekil 7.12. 300 W çıkıĢ gücü ve 220 V etkin giriĢ geriliminde; giriĢ gerilim-giriĢ
akım dalga Ģekli ve giriĢ akım THB oranı
ġekil 7.13. 600 W çıkıĢ gücü ve 220 V etkin giriĢ geriliminde; giriĢ gerilim-giriĢ
akım dalga Ģekli, giriĢ güç katsayısı ve güç değerleri, giriĢ akım THB
oranı
138
ġekil 7.10‟dan, önerilen SGG sarmaĢık yükselten devresinin toplam akım dalgacık
oranının endüktör akım dalgacık oranlarından daha az olduğu görülmektedir. Toplam
akım ile endüktör akımlarının dalgacık oranları arasındaki farkı daha iyi görmek için
ġekil 7.10‟daki grafiğin zaman ekseni küçültülerek ġekil 7.14 ve ġekil 7.15 elde
edildi. ġekil 7.14‟te görev çarpanının (d) 0,5‟ten büyük ve küçük olduğu
durumlardaki endüktör akımlarının dalga Ģekilleri gösterilirken, ġekil 7.15‟te yine
farklı görev çarpanı değerlerinde doğrultulmuĢ toplam akım ile birinci endüktörün
akımına ait dalga Ģekilleri gösterilmiĢtir. Endüktör akım dalga Ģekillerinde görev
çarpanının 0,5‟ten küçük olduğu durumlarda oluĢan kırılmalar önerilen SGG‟den
kaynaklıdır. Bir anahtar (örneğin M1) kesimde iken endüktör akımı zamanla azalır,
fakat yardımcı anahtar diğer anahtar (örneğin M2) için devreye girdiğinde her iki güç
katının endüktörlerinden de akım çeker. Bu nedenle, kesimde olan anahtarın
endüköründen yardımcı anahtarın devreye girdiği süre kadar artan bir akım çekilir.
GiriĢ gerilimin tepe noktalarında oluĢan bu durum devrenin çalıĢma karakteristiğini
etkilemediği gibi giriĢ akım dalgacık oranının daha da azalmasını sağlar.
Deneysel çalıĢmalardan elde edilen sonuçlara bakıldığında, benzetim çalıĢmalarından
elde edilen sonuçlarda olduğu gibi, görev çarpanının her iki durumunda da
endüktörler giriĢ akımını eĢit paylaĢmakta ve toplam giriĢ akım dalgacık oranını
düĢürmektedir.
ġekil 7.14. d>0,5 ve d<0,5 için endüktör akımları dalga Ģekilleri (iL1 , iL2 )
139
ġekil 7.15. d>0,5 ve d<0,5 için doğrultulmuĢ toplam akım ve birinci endüktörün
akım dalga Ģekilleri (ig , iL1)
Devrenin çıkıĢ geriliminin ve giriĢ akımının yük değiĢimine tepkisi ġekil 7.16‟da
verilmiĢtir. Devre 600 W çıkıĢ gücünde çalıĢırken 400 W değerine düĢürülmekte ve
tekrar 600 W‟a yükseltilmektedir. Her iki durumda da çıkıĢ gerilim değerinin bir süre
sonra toparlandığı ve giriĢ akımının giriĢ gerilimini takip ettiği görülmüĢtür.
ġekil 7.16. 600 W – 400 W çıkıĢ yük değiĢiminde, çıkıĢ gerilim ve giriĢ akım
değiĢimleri
Önerilen SGG yönteminin sarmaĢık yükselten GKD devresindeki ana anahtarlar
üzerindeki etkisini görmek için, devrede kullanılan MOSFET‟lerin gerilim ve akım
dalga Ģekilleri incelendi. AĢağıdaki Ģekillerde (ġekil 7.17-ġekil 7.20) farklı görev
çarpanı değerleri için ana anahtarların (M1 ve M2) gerilim ve akım grafikleri
aktarılmıĢtır. Benzetim çalıĢmasında bahsedildiği gibi, görev çarpanı 0,5‟ten büyük
iken, her ana anahtardan önce yardımcı anahtar (Ma) devreye girdiğinden, SGG için
140
belirlenen gecikme süresi kadar her iki ana anahtarın gövde diyotlarından akım
geçmektedir. Bu durum ġekil 7.17‟de görülmektedir.
ġekil 7.17. d>0,5 için M1 ana anahtarın gerilim-akım dalga Ģekilleri (VDSM1, iDM1)
ġekil 7.18. d<0,5 için M2 ana anahtarın gerilim-akım dalga Ģekilleri (VDSM2, iDM2)
ġekil 7.19. d>0,5 için M1 ana anahtarın gerilim-akım ve M2 ana anahtarın akım dalga
Ģekilleri (VDSM1, iDM1, iDM2)
141
ġekil 7.20. Farklı giriĢ akımı değerlerinde; M1 ana anahtarın ve Ma yardımcı
anahtarın akım dalga Ģekilleri (iD1, iDMa)
ġekil 7.18‟de görüldüğü gibi görev çarpanı 0,5‟ten küçük ise, her hangi bir anahtar
kesimdeyken diğer ana anahtar da iletime geçmektedir. Yardımcı anahtar devreye
girdiği zaman kesimde olan anahtarın da gövde diyodundan akım geçmektedir.
Gövde diyodunda akım geçerken anahtar terminallerinde oluĢan gerilim değeri
diyodun iletim değeri olan 1 V düzeyinde olduğundan, Ģekilde açıkça görülen bu
durum, kesimde olan anahtarda anahtarlama kaybı oluĢturmamaktadır.
DönüĢtürücülerde yardımcı devreler ile anahtarlama kayıplarının azaltılması önemli
olduğu kadar, yardımcı devrelerin de kayıpsız olması önemlidir. Bu nedenle, farklı
görev çarpanı değerlerinde yardımcı anahtarın gerilim-akım grafiklerinin incelenmesi
gerekir. ġekil 7.21 ve 7.22‟de yardımcı anahtar dalga Ģekilleri verilmiĢtir.
ġekil 7.21. d<0,5 için Ma yardımcı anahtarın gerilim-akım dalga Ģekilleri (VDSMa,
iDMa)
142
ġekil 7.22. d>0,5 için Ma yardımcı anahtarın gerilim-akım dalga Ģekilleri (sağdaki
grafikte M1 anahtar akımı ile değiĢimi verilmiĢtir) (VDSMa, iDMa)
Benzetim çalıĢmalarında olduğu gibi deneysel çalıĢmalarda da yardımcı anahtarın
(Ma) yumuĢak anahtarlama ile anahtarlandığı görülmektedir. ġekil 7.23‟te yarımcı
devrede kullanılan Cr kondansatörünün gerilimi ile yardımcı anahtar akımının
grafikleri ve bunların ana anahtar akımı ile değiĢimi aktarılmıĢtır. Daha önce
yardımcı devre analizinde de bahsedildiği gibi, devrede endüktöre depolanan enerji
önce kondansatöre transfer edilir daha sonra ise çıkıĢa aktarılır.
ġekil 7.23. Cr kondansatör gerilimi ve yardımcı anahtar akımı dalga Ģekilleri
(sağdaki grafikte M1 anahtar akımı ile değiĢimi verilmiĢtir) (VCr, iDMa)
143
Önerilen
SGG
sarmaĢık
yükselten
GKD
devresinin
deneysel
çalıĢmaları
tamamlandıktan sonra, SGG için tasarlanan yardımcı devre sökülerek sarmaĢık
yükselten GKD devresi sert anahtarlamalı olarak çalıĢtırıldı. Bu Ģekilde, önerilen
SGG yardımcı devresinin yumuĢak anahtarlama haricinde sarmaĢık yükselten GKD
devresinin verimini nasıl etkilediği incelendi. SarmaĢık yükselten GKD devresi sert
anahtarlama ile çalıĢtırılırken ana anahtarlara paralel 2,2 nF‟lık kondansatör
bağlandı. 600 W çıkıĢ güç değerinde, sarmaĢık yükselten GKD devresinin sert
anahtarlaması sonucu elde edilen dalga Ģekilleri aĢağıda verilmiĢtir (ġekil 7. 24 –
ġekil 7.30).
ġekil 7.24. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; giriĢ gerilim-giriĢ
akım ve çıkıĢ gerilim dalga Ģekilleri (Po=600 W, Vin=220 V)
ġekil 7.25. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; giriĢ gerilim-giriĢ
akım dalga Ģekilleri ve giriĢ akım THB oranı (Fluke 43B cihazı, 600 W
çıkıĢ güç ve 220 V giriĢ geriliminde)
144
ġekil 7.26. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; d<0,5 ve d>0,5
için endüktör akımları dalga Ģekilleri (iL1 , iL2 )
ġekil 7.27. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; d<0,5 ve d>0,5
için doğrultulmuĢ toplam akım ve birinci endüktörün akım dalga Ģekilleri
(ig , iL1)
ġekil 7.28. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; farklı görev
çarpanı değerlerinde M1 ana anahtarın gerilim-akım dalga Ģekilleri
(VDSM1, iDM1)
145
ġekil 7.29. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; M1 ana anahtarın
gerilim-akım dalga Ģekilleri (ON ve OFF zamanlarındaki) (VDSM1, iDM1)
ġekil 7.30. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin; farklı görev
çarpanı değerlerinde ana anahtarların gerilim-akım dalga Ģekilleri (VDSM1,
iDM1, iDM2)
220 V etkin giriĢ gerilimi ve 600 W çıkıĢ güç değerleri için sert anahtarlamalı
sarmaĢık yükselten GKD devresinin deneysel çalıĢma sonuçlarına bakıldığında, hem
çıkıĢ gerilim hem de endüktör akımları dalga Ģekillerinde zıplamaların (spike) olduğu
görülmektedir. SarmaĢık yükselten GKD devresi faz farklı anahtarlandığından, her
güç katı devreye girdiğinde diğer güç katını da etkilemektedir. Gerilim ve akım dalga
Ģekillerindeki bu zıplamalar hem anahtarlar üzerinde stres oluĢturmakta hem de giriĢ
akımına yansıyarak giriĢ THB oranını yükseltmektedir. Nitekim, 220 V giriĢ gerilimi
ve 600 W çıkıĢ güç değeri için yapılan deneysel çalıĢma sonuçlarına bakıldığında;
önerilen SGG yumuĢak anahtarlamalı devrede giriĢ akım THB oranı %9,6 iken sert
146
anahtarlamalı devrede giriĢ akım THB oranı %12,4 çıkmaktadır. Ayrıca, gerilim ve
akım dalga Ģekillerindeki zıplamalar kontrol devresini olumsuz etkiler.
Sert anahtarlamalı devrenin deneyesel çalıĢmasından elde edilen anahtarların dalga
Ģekillerine bakıldığında (ġekil 7.28 – 7.30); devrede kullanılan MOSFET‟lerin
özellikle açma (ON) zamanlarında ciddi kayıpların olduğu açık bir Ģekilde
görülmektedir. Bu kayıpların haricinde, anahtardan geçen akımın tepe değerinde de
ciddi bir yükselme söz konusu. Bu nedenle, sert anahtarlamalı devrede kullanılacak
anahtarlar daha yüksek akım taĢıma kapasitesine sahip olmalıdır.
ġekil 7.30‟dan, görev çarpanı 0,5‟ten küçükken, sarmaĢık yükselten devrenin iletime
giren güç katının kesimdeki güç katını ciddi bir Ģekilde etkileyerek osilasyonlara yol
açtığı görülmektedir. Bu osilasyonlar anahtar üzerinde stres oluĢturduğu gibi
anahtarın iletim kayıplarını da arttırmaktadır. Bu nedenle, sarmaĢık yükselten GKD
devrelerin yumuĢak anahtarlanması zorunluluk teĢkil etmektedir.
Önerilen SGG sarmaĢık yükselten GKD devresi ile sert anahtarlamalı sarmaĢık
yükselten GKD devresi, dalga Ģekilleri bakımından karĢılaĢtırıldıktan sonra verimleri
bakımından da karĢılaĢtırıldı. Her iki devrenin verim hesapları 300 W – 700 W çıkıĢ
güç değerleri aralığında yapıldı. Devrelerin verimi hesaplanırken, ġekil 7.31‟de
verilen devre temelinde aĢağıdaki iĢlemler uygulandı.
a-) ÇıkıĢ güç osiloskopla ölçülmesine rağmen, çıkıĢ güç hesabında Avometrelerdeki
değerler kullanıldı (çalıĢmalara baĢlamadan önce avometrelerin daha hassa
ölçüm aldığı gözlendi).
b-) GiriĢ gücü osiloskopla ölçülmesine rağmen, giriĢ güç hesabında Fluke 43B güç
analizöründen okunan değerler kullanıldı (osiloskop akım proplarının düĢük
akım değerlerinde hatalı okuduğu gözlendi).
c-) Önerilen yumuĢak anahtarlama devresi farklı güçlerde çalıĢtırılarak sonuçlar
alındı. Daha sonra yardımcı devre çıkarılarak sarmaĢık yükselten devre sertanahtarlamalı olarak çalıĢtırıldı. Her iki durumda da ölçümlerde aynı yöntemler
kullanıldı.
147
Io
Iin
(Avo2)
VĢebeke
IĢebeke
ZVT
Vin
Varyak
(0-220V)
(Avo1)
Vo
Ro
Güç Devresi
Vin
Iin
Fluke43B
Güç Analizörü
Vo
Vin
Iin
Io
TPS2024
Osiloskop
ġekil 7.31. Verim hesabı yapılırken kullanılan cihazlarla birlikte devre görünümü
Çizelge 7.1. Önerilen SGG sarmaĢık yükselten GKD devresinin deney sonuçları
Po (W)
Pin (W)
gk
THB (Iin) (%)
Verim (ή) (%)
305
326
0,99
10,9
93,50
403
421
0,99
10,8
95,72
514
531
0,99
10,1
96,79
595
613
0,99
9,6
97,06
718
738
0,99
9,2
97,30
Çizelge 7.2. Sert anahtarlamalı sarmaĢık yükselten GKD devresinin deney sonuçları
Po (W)
Pin (W)
gk
THD (Iin) (%)
Verim (ή) (%)
296
319
0,98
13
92,80
407
435
0,98
13,5
93,56
521
551
0,98
13,2
94,55
602
634
0,98
12,4
94,95
720
754
0,99
12,3
95,49
Önerilen SGG sarmaĢık yükselten GKD devresi ile sert anahtarlamalı sarmaĢık
yükselten GKD devresinin farklı çıkıĢ güç değerlerinde çalıĢtırılmaları sonucu elde
edilen deneysel veriler Çizelge 7.1 ve Çizelge 7.2‟de aktarılmıĢtır. Verim
148
karĢılaĢtırması için yapılan deneysel çalıĢmaların tamamı 220 V etkin giriĢ
geriliminde yapılmıĢtır. Çizelge 7.1 ve 7.2‟deki değerler kullanılarak ġekil 7.32 elde
edilmiĢtir. ġekil 7.32‟den, önerilen SGG sarmaĢık yükselten GKD devresinin bütün
çıkıĢ güç değerlerinde veriminin daha yüksek olduğu görülmektedir.
ġekil 7.32. Önerilen SGG devre ile sert anahtarlamalı devrenin verim karĢılaĢtırması
Sonuçlardan, 600 W çıkıĢ güç değerinde, önerilen devrenin veriminin %97,06 iken
sert anahtarlamalı devrenin veriminin %94,95 olduğu görülmektedir. Yani, önerilen
SGG yardımcı devresi sarmaĢık yükselten GKD devresinin ana anahtarlarının
yumuĢak anahtarlamasını sağladığı gibi, devrenin verimini de 600 W çıkıĢ gücünde
%2,11 oranında arttırdığı kaydedilmiĢtir.
Çizelge 7.1‟de verilen THB değerleri ile çıkıĢ güç değerleri ġekil 7.33‟te gösterildiği
gibi grafik haline dönüĢtürülürse; bütün GKD devrelerinden beklenildiği gibi,
önerilen devrenin güç oranı arttıkça giriĢ akım THB değerinin düĢtüğü
görülmektedir. Önerilen devrenin giriĢ akım THB oranı 220 V giriĢ gerilim değeri
için %10 civarında iken 110 V giriĢ gerilim değeri için %5,5 civarındadır.
149
ġekil 7.33. 220 V giriĢ geriliminde önerilen SGG devresinin farklı güçlerde giriĢ
akım THB değerinin karĢılaĢtırması
Önerilen devrenin gerek benzetim çalıĢmalarından gerekse deneysel çalıĢmalarından
elde edilen sonuçların bir birine yakın olduğu gözlenmiĢtir. Benzetim çalıĢmaları ve
deneysel çalıĢma sonuçları ele alınarak, önerilen SGG sarmaĢık yükselten GKD
devresi için değerlendirmeler bir sonraki bölümde daha detaylı aktarılmıĢtır.
150
8. SONUÇ VE DEĞERLENDĠRME
Bu çalıĢmada; doğrusal olmayan yükler tarafından üretilen akım harmoniklerinin
düzenlenmesi için, ulusal/uluslararası kuruluĢlar tarafından getirtilen sınırlamalar
çerçevesinde, pasif ve aktif GKD devre yöntemleri incelenmiĢ, aktif GKD devre
yöntemlerinden sarmaĢık (faz farklı paralel) yükselten devre için yeni bir SGG
yumuĢak
anahtarlama
yardımcı
devresi
önerilmiĢtir.
Diğer
GKD
kontrol
yöntemlerine göre bir çok üstünlüğü olan ortalama akım kontrol yöntemi incelenmiĢ
ve DSP tabanlı ortalama akım kontrol yöntemi önerilen devrenin kontrolcüsü olarak
kullanılmıĢtır. Matematiksel analizi yapıldıktan sonra önerilen devrenin hem güç
devresi hem de kontrol devresi için tasarım çalıĢmaları yapılmıĢtır. Tasarım
çalıĢmalarından sonra, Simplorer benzetim programı kullanılarak tüm devrenin
benzetim
çalıĢmaları
tamamlanmıĢ
ve
benzetimde
kullanılan
parametreler
kullanılarak önerilen devrenin prototipi gerçekleĢtirilmiĢtir.
Aktif GKD devrelerine her ne kadar zorunluluklardan dolayı ihtiyaç duyulsa da,
yükten önce kullanılan bir ön düzenleyici devre (pre regulator) olduğundan küçük
boyutlu, düĢük maliyetli ve verimli olması istenir. MOSFET‟lerin yüksek
anahtarlama frekansından yararlanılarak küçük boyutlu GKD devresi elde edildiği
zaman yüksek anahtarlama frekansından kaynaklı ciddi anahtarlama kayıpları oluĢur.
Bu nedenle, yumuĢak anahtarlama yöntemlerinden biri kullanılarak daha verimli
aktif GKD devresi kullanılmalıdır. Orta ve yüksek güçlerde sıklıkla kullanılan
sarmaĢık yükselten tip aktif GKD devresi için yeni bir yumuĢak anahtarlama yöntemi
geliĢtirilerek daha verimli ve düĢük maliyetli bir ön düzenleyici devre tasarımı bu tez
çalıĢmasının amacını oluĢturmuĢtur. Hedeflenen amaç doğrultusunda yumuĢak
anahtarlama yöntemlerinden olan SGG yöntemi kullanılarak faz farklı paralel
yükselten GKD devresine uygun yeni bir yardımcı devre geliĢtirilmiĢtir. SarmaĢık
yükselten GKD devresi için önerilen bu yardımcı devrenin literatürde mevcut
sarmaĢık yükselten devrelere uygulanmıĢ yardımcı devrelere göre önemli özellikleri
aĢağıda özetlenmiĢtir.
151
SarmaĢık yükselten GKD dönüĢtürücüsündeki birden çok ana anahtar için
yalnızca bir yardımcı anahtarın kullanılması hem dönüĢtürücünün maliyetini
arttırmamakta hem de kontrol devresinin daha az karmaĢık olmasını
sağlamaktadır.
Önerilen yardımcı devrede kullanılan pasif elemanların sayısının az (özellikle
endüktörün) olması ve değerlerinin oldukça düĢük olması dönüĢtürücünün
boyutunu arttırmamaktadır.
SarmaĢık yükselten GKD devresindeki ana anahtarlar SGG ile anahtarlandığı gibi
yardımcı devre anahtarı da hem açma hem de kesim zamanında yumuĢak
anahtarlama ile anahtarlanmaktadır. Bu da, devrenin verimini daha çok yükseltir.
Önerilen yardımcı devre ile hem ana anahtarlar üzerinde hem de yardımcı devre
elemanları üzerinde her hangi bir gerilim veya akım stresi oluĢmamaktadır.
Önerilen yardımcı devredeki pasif yarıiletken elemanlar (diyotlar) üzerinde
devrenin verimini etkileyecek kayıp oluĢmamaktadır.
Önerilen yardımcı devre sarmaĢık yükselten GKD devresinin en olumsuz
koĢulları düĢünülerek tasarlandığı için, giriĢ geriliminin ve akımının bütün
değiĢimlerinde etkinliğini korumaktadır.
Önerilen devrenin hem benzetim çalıĢmalarından hem de deneysel çalıĢmalarından
bir çok sonuç kaydedildi. Tez içeriğinde aktarılan bu sonuçlara bakıldığında,
benzetim ve uygulama çalıĢmalarına ait sonuçların bir birine çok yakın olduğu
gözlenmiĢtir. Sonuçlardan, değiĢik çıkıĢ güç değerlerinde, önerilen SGG sarmaĢık
yükselten GKD devresinin güç katsayısının 0,99‟un üzerinde olduğu, giriĢ akım
THB oranının 220 V giriĢ gerilimi için %10 civarında ve 110 V giriĢ gerilim değeri
için ise %5,5 civarında olduğu gözlenmiĢtir. Faz farklı anahtarlamadan dolayı, giriĢ
akım dalgacık oranının beklenildiği gibi endüktör akım dalgacık oranından düĢük
olduğu kaydedilmiĢtir. Devrede kullanılan anahtarların gerilim-akım dalga
Ģekillerinden, önerilen SGG yardımcı devresinin geniĢ güç aralığında ve giriĢ
akımının bütün noktalarında SGG koĢulunu sağladığı görülmüĢtür. Önerilen
yardımcı devre ile ana anahtarlarda SGG koĢulu sağlanırken, yardımcı anahtar ise
yumuĢak anahtarlanmaktadır.
152
ÇalıĢmada, sert anahtarlamalı sarmaĢık yükselten GKD devresi ile ilgili çalıĢmalar da
yapılmıĢ ve önerilen yardımcı devrenin verim açısından katkısı kaydedilmiĢtir. Elde
edilen sonuçlardan, farklı güç değerlerinde önerilen SGG sarmaĢık yükselten
devresinin verimi eĢdeğeri olan sert anahtarlamalı devrenin veriminden yüksektir.
600 W çıkıĢ güç değerinde, önerilen devrenin verimi %97,06 iken sert anahtarlamalı
devrenin verimi %94,95‟tir.
Literatürde mevcut benzer çalıĢmalara göre üstünlükleri olan bu devrenin tek
dezavantajı, devredeki ana anahtarların anahtarlama frekansı, kullanılan yardımcı
anahtarın anahtarlama frekansına bağlı olarak sınırlanır. Örneğin, kullanılacak
yardımcı anahtarın nominal frekansı 200 kHz ise devredeki ana anahtarların en
yüksek anahtarlama frekansı 200/2=100 kHz olur (Ģayet devre iki adet güç katı
içeriyorsa). Yani, yardımcı devrede bir adet anahtar kullanılması, belli bir
anahtarlama frekansı için sarmaĢık yükselten devrede kullanılacak güç katı sayısını
sınırlar.
SarmaĢık yükselten GKD devresi için önerilen bu yöntemin geliĢtirilerek diğer GKD
devrelerine uygulanması literatüre katkı sağlayacağı kanısındayım.
153
K AYNAKLAR
1.
Rashid, M. H. “Power Electronics : Circuits, Devices and Applications”,
Prentice Hall Inc., NJ, USA, 68-120 (2004).
2.
Ray, W. F. and Davis, R. M., “The definition and importance of power factor for
power electronics converters”, Proc. European conference on Power
Electronics and Applications (EPE), Europe, 799-805 (1988).
3.
Grotzbach, M., “Line side behavior of uncontrolled rectifier bridges with
capacitive DC smoothing”, Proc. European Conference on Power Electronics
and Applications (EPE), Eurpe, 761-764 (1989).
4.
TS EN 61000-3-2, Electromagnetic compatibility (EMC) – Part 3-2: Limits –
Limits for harmonic current emissions (equipment input current ≤ 16 A per
phase), (EN Harmonik akım standardı), (2010).
5.
IEEE Std 519-1992, Recommended practices and requirements for harmonic
control in electrical power systems, (IEEE Harmonik akım standardı), (1992).
6.
Kelley, A. W. and Yadusky, W. F., “Rectifier design for minimum line-current
harmonics and maximum power factor”, IEEE Trans. on Power Electronics,
7(2): 332-341 (1992).
7.
Grigore, V., “Topologıcal Issues In Sıngle-Phase Power Factor Correctıon”,
Ph.D. thesis, Helsinki University of Technology, Espoo, Finland, 17-28 (2001).
8.
Basu, S., “Single Phase Active Power Factor Correction Converters”, Ph.D.
thesis, Chalmers University Of Technology, Göteborg, Sweden, 9-37 (2006).
9.
Bing, Z., Chent, M., Miller, S. K.T., Nishida, Y., and Sun, J., “Recent
developments in single-phase power factor correction”, IEEE Power
Conversion Conf., Nagoya, 1520-1526 (2007).
10. Qiao, C., and Smedley, K. M., „„A Topology Survey of Single-Stage Power
Factor Corrector with a Boost Type Input-Current-Shaper”, IEEE Trans. on
Power Electronics, 16(3): 360-368 (2001).
11. Wei, H., Batarseh, I., „„Comparison of Basic Converter Topologies For Power
Factor Correction‟‟, IEEE Southeastcon’98 Proceedings, Southeastcon, 348353 (1998).
12. Yang, Z., Sen, P.C., „„Recent Developments in High Power Factor Switch-mode
Converters‟‟, Elec. and Comp. Eng. IEEE Canadian Cnf., Canadian, 477-480
(1998).
154
13. Pandey, A., Kothari, D. P., Mukerjee, A. K., and Singh, B., „„Modelling and
simulation of power factor corrected AC–DC converters‟‟, Int. Journal of
Electrical Engineering Education, 41(3): 244-264 (2004).
14. Miwa, B. A., Otten, D. M., and Schlecht, M. F., „„High efficiency power factor
correction using interleaving techniques‟‟, IEEE APEC’92 Conf., Boston, 557–
568 (1992).
15. Balogh, L. and Redl, R., „„Power-factor correction with interleaved boost
converters in continuous inductor current mode‟‟, IEEE APEC’93 Cnf., San
Diego, 168–174 (1993).
16. Genc, N., Iskender, I., „„Analysis of critical mode interleaved boost PFC
converter‟‟, ECAI 2009, 3rd International Conference on Electronics,
Computers and Artificial Intelligence, PiteĢti, 55-60 (2009).
17. Singh, B., Singh, B. N., Chandra, A., „„A review of single phase improved
power quality AC–DC converters‟‟, IEEE Trans. on Ind. Electronics, 50(5):
962-981 (2003).
18. Tang, W., Jiang, Y., Hua, G. C., Lee, F. C., „„Power factor correction with
flyback converter employing charge control‟‟, IEEE APEC’93 Cnf., San
Diego, 293-298 (1993).
19. Choi, W.Y., Kwon, J. M., „„Bridgeless boost rectifier with low conduction losses
and reduced diode reverse-recovery problems‟‟, IEEE Trans. on Power
Electronics, 54(2): 769-780 (2007).
20. [Reviev, 14] Brkovic, M. and Cuk, S., „„Input current shaper using Cuk
converter‟‟, 14th Int. Telecommunications Energy Conference, INTELEC '92,
Washington, 532-539 (1992).
21. Elmore, M. S., „„Input current ripple cancellation in synchronized, parallel
connected critically continuous boost converters‟‟, IEEE APEC’96 Cnf., San
Jose, CA, 152–158 (1996).
22. Lee, P. W., Lee, Y. S., Cheng, D. K. W., and Liu, X. C., „„Steady-state analysis
of an interleaved boost converter with coupled inductors‟‟, IEEE Trans. on Ind.
Electronics, 47(4): 787–795 (2000).
23. Braga, H. A. C. and Barbi, I., „„A 3-kW unity-power-factor rectifier based on a
two-cell boost converter using a new parallel-connection technique‟‟, IEEE
Trans. on Power Electronics, 14(1): 209–217 (1999).
155
24. Rossetto, L., Spiazzi, G., Tenti, P., “Control techniques for power factor
correction converters‟‟, Power Electronics, Motion Control, PMEC Conf.
Proc., USA, 1310-1318 (1994).
25. Spiazzi, G., Mattavelli, G., Rossetto, L., “Sliding mode control of dc-dc
converters‟‟, COBEP Conf. Proc., Bole Horizonte, 59-68 (1997).
26. Smedley, K. M., “Control art of switching converters”, Ph.D. thesis, California
Institute of Technology, 25-42 (1990).
27. Smedley, K. M., Zhou, L., Qiao, C., “Unified constant-frequency integration
control of active power filters – steady-state and dynamics”, IEEE Transaction
on Power Electronics, 16(3): 428-436 (2001).
28. Çadirci, I., Yafavi, A., and ErmiĢ, M., “Unity power factor boost converter with
phase shifted parallel IGBT operation for medium power applications”, IEE
Proc.-Electr. Power Appl., 149(3): 237-244 (2002).
29. Wu, K. C., “Switch-Mode Power Converters: Design and Analysis”, Academic
Press, 50-85 (2005).
30. Kaya, M. C., “Design, implementation, and control of a two– stage ac/dc
isolated power supply with high input power factor and high efficiency”,
Doktora tezi, Orta Doğu Teknik Üniversitesi Fen Bilimleri Enstitüsü, 11-40
(2008).
31. Shin, H. B., Park, J.G., Chung, S.K., Lee, H.W., Lipo, T.A., “Generalised
steady- state analysis of multiphase interleaved boost converter with coupled
inductors”, IEEE Proceedings on Electric Power Applications, 152(3): 584-594
(2005).
32. Senjyu, T., Veerachary, M. and Uezato, K., „„Steady-state analysis of PV
supplied separately excited DC motor fed from IDB converter‟‟, Solar Energy
Materials and Solar Cells, 71: 493-510 (2001).
33. Veerachary, M., Senjyu, T., Uezato, K., „„Modeling and analysis of interleaved
dual boost converter‟‟, ISIE 2001 Conf., Pusan, Korea, 718-722 (2001).
34. Sebastian, J., Jaureguizar, M., Uceda, J., “An overview of power factor
correction in single-phase off-line power supply systems”, 20th International
Conference on Industrial Electronics, Control and Instrumentation, Bologna,
1688-1693 (1994).
35. Steigerwald, R. L., “Power Electronic Converter Technology,” Proceedings of
the IEEE, 89(6): 890-897 (2001).
156
36. Dixon, L., “Average current mode control of switching power supplies”,
Unitrode Power Supply Design Seminar Manual SEM700, 1990.
37. Ericson, R. W., “Fundamentals of Power Electronics”, Chapman & Hall, New
York, 125-140 (1997).
38. Gürdal, O., “Güç Elektroniği”, Nobel Yayın Dağıtım, Ankara, 50-70 (2000).
39. Hsieh, Y. C., Hsueh, T. C. and Yen, H. C, „„An interleaved boost converter with
zero-voltage transition‟‟, IEEE Transaction on Power Electronics, 24(4): 973978(2009).
40. Streit, R. and Tollik, D., „„High efficiency telecom rectifier using a novel softswitched boost based input current shaper‟‟, IEEE INTELEC Cnf. Proc.,
Kyoto, 720-726 (1991).
41. Liu, K. H., Lee, F. C., „„Zero-voltage switching technique in dc-dc converters‟‟,
IEEE PESC Conf. Proc., 58-70 (1986).
42. Bodur, H., Bakan, A. F., „„A new ZVT-ZCT-PWM dc-dc converter‟‟, IEEE
Transaction on Power Electronics, 19(3): 676–684 (2004).
43. Hua, G., Leu, C., Lee, F. C., „„Novel zero voltage transition PWM converters‟‟,
IEEE PESC Conf. Proc., 55-61 (1992).
44. Bassett, J. A., „„New zero voltage switching high frequency boost converter
topology for power factor correction‟‟, IEEE INTELEC Conf. Proc., Hague,
813-820 (1995).
45. Moschopolous, G., Jain, P., Joos, G., „„A novel zero-voltage switched PWM
boost converter‟‟, IEEE PESC Conf. Proc., Atlanta, 694-700 (1995).
46. Wu, X., Zhang, J. and Qian, Z., „„A new zero voltage switching boost converter
with active clamping‟‟, IEEE APEC Conf. Proc., Austin, 406-412 (2005).
47. Gurunathan, R. and Bhat, A. K. S., „„A zero-voltage-transition boost converter
using a zero voltage switching auxiliary circuit‟‟, IEEE Transactions on Power
Electronics, 17: 658-668 (2002).
48. Wang, C. M., „„Novel zero-voltage-transition PWM DC-DC converters‟‟, IEEE
Transactions on Ind. Electronics, 53(1): 254-262 (2006).
49. Moschopoulos, G., Jain, P., Liu, Y. and Joos, G., „„A zero-voltage switched
PWM boost converter with an energy feedforward auxiliary circuit‟‟, IEEEPESC Conf. Proc., Italy, 76-82 (1996).
157
50. Lee, I. O., Lee, D. Y. and Cho, B. H., „„High performance boost PFC preregulator with improved zero-voltage-transition (ZVT) converter‟‟, IEEE
APEC-2001 Conf., California,337-342 (2001).
51. Yao, G., Chen, A. and He, X., „„Soft switching circuit for interleaved boost
converters‟‟, IEEE Transaction on Power Electronics, 22(1): 80-86 (2007).
52. Oliveira Stein, C. M., Pinheiro, J. R., and Hey, H. L., „„A ZCT auxiliary
commutation circuit for interleaved boost converters operating in critical
conduction mode‟‟, IEEE Transaction on Power Electronics, 17(6): 954-962
(2002).
53. Huang, W., Moschopoulos, G., „„A new famıly of auxiliary circuits for zerovoltage-transition PWM converters with dual active auxiliary circuits‟‟, IEEE
Transaction on Power Electronics, 21(2): 370-379 (2006).
54. Data Manual, “TMS320F2812 Digital Signal Processors”, Texas Instruments
SPRS1740, 2007.
55. Huliehel, F. A., Lee, F. C., Cho, B. H., “Small-signal modeling of the
singlephase boost high power factor converter with constant frequency control”,
IEEE Power Electronics Specialists Conference Records, Toledo, 475-482
(1992).
56. Choudhury, S., “Average current mode controlled power factor correction
converter using TMS320LF2407A”, Texas Instruments Application Report
SPRA902A, (2005).
158
EKLER
159
EK-1. IRFP460 güç MOSFET anahtarının kataloğu
160
EK-2. IXYS DSEI 30-12A hızlı diyodun kataloğu
161
EK-3. Önerilen devrenin güç ve besleme devrelerine ait PCB çizimleri
Güç devresine ait PCB çizimi
Besleme ve izolasyon devresine ait PCB çizimi
162
ÖZGEÇMĠġ
KiĢisel Bilgiler
Soyadı, adı
: GENÇ, Naci
Uyruğu
: T.C.
Doğum tarihi ve yeri
: 10.10.1977 Horasan/Erzurum
Medeni hali
: Evli
Telefon
: 0 (312) 555 418 03 21
e-mail
: nacigenc@yahoo.com; nacigenc@gazi.edu.tr
Eğitim
Derece
Eğitim Birimi
Mezuniyet tarihi
Ġng. Hazırlık
ODTÜ Yabancı Dil. Yük. Ok.
2003
Y. Lisans
YYÜ./ Elk.Elktn. Müh. A.B.D.
2002
Lisans
Gazi Ünv./ Elk.Eğt. A.B.D.
1999
Lise
Horasan Lisesi
1995
Yıl
Yer
Görev
2000-2002
YYÜ Müh.-Mim. Fak.
ArĢ. Gör.
2003-2006
ODTÜ Müh.-Mim. Fak.
ArĢ. Gör.
2006-2010
Gazi Ünv. Müh.-Mim. Fak.
ArĢ. Gör.
ĠĢ Deneyimi
Yabancı Dil
Ġngilizce
Hobiler
Spor, müzik