BÜLENT ECEVĠT ÜNĠVERSĠTESĠ
MÜHENDĠSLĠK FAKÜLTESĠ
GEOMATĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ
KOORDĠNAT SĠSTEMLERĠ
(DERS NOTU)
YRD.DOÇ.DR. ERAY KÖKSAL
ZONGULDAK
2016
1. GĠRĠġ ve TANIMLAR
Uzayda herhangi bir noktanın konumunu belirleyebilmek için kullandığımız sistemlere
koordinat sistemleri, bu sistemler içerisindeki noktaların konumunu tanımlarken
kullandığımız parametrelere de o noktanın koordinatları adı verilmektedir.
Geomatik Mühendisinin baĢlıca görevi; doğru ve güvenilir konum bilgisi üretmektir. Bu
amaçla çok sayıda koordinat sistemi tanımlar, konumlar üretir ve bu konumların diğer
sistemler içerisinde karĢılıklarının bulunması için sistemler arasındaki geometrik ve fiziksel
iliĢkileri belirler(dönüĢtürür.)
Ancak ne yer yuvarı üzerinde ne de uzayda hareketsiz bir yer bulmak zordur. Bu nedenle
koordinat sistemlerinin oluĢturulmasında ve koordinatların tanımlanmasında, Yer yuvarının
üzerindeki jeodinamik hareketlerin (mağma içindeki yer değiĢtirmeler, kabuk hareketleri,
v.b.), yer yuvarının dönme ekseninin katı kabuğuna göre yer değiĢtirmesinin, yer yuvarının
dönme hızının, yer yuvarının GüneĢ etrafında dolanmasının, GüneĢ ve Ay‟ın çekim
etkilerinin v.b. nedenlerle oluĢan hareketlerin modellendirilmesi ve tüm bu hareketleri
kapsayacak sistemlerin tanımlanması gerekmektedir.
Bu anlamda, doğru ve güvenilir koordinat sistemleri için, doğru ve güvenilir jeodinamik
modellere ihtiyaç vardır. Bu nedenle, jeodezi ile diğer yerbilimleri arasında sıkı bir iĢbirliği
vardır.
2. KOORDĠNAT SĠSTEMLERĠNĠN ÖZELLĠKLERĠ
2.1 Koordinat Sisteminin Tanımlanması
Bir koordinat sistemi;
Sistemin orijininin (baĢlangıç noktası) belirlenmesi,
Eksenlerinin yönelmelerinin/dönüklüklerinin belirlenmesi,
Konum belirleme parametrelerinin belirlenmesi, (doğrusal, açısal )
Yolu ile tanımlanmalıdır.
2.1.1 Koordinat Sistemlerinin BaĢlangıç Noktaları
BaĢlangıç noktasının (orijininin) konumuna göre koordinat sistemlerini aĢağıdaki Ģekilde
sınıflandırmak mümkündür:
Toposentrik (BaĢlangıç noktası gözlem yeri),
Jeosentrik (BaĢlangıç noktası yerin merkezi)
Helyosentrik (BaĢlangıç noktası GüneĢin merkezi)
Barisentrik (BaĢlangıcı bir grup gök cisminin ağırlık merkezi; örneğin güneĢ sistemi
veya yeryuvarı-ay sistemi gibi)
Galaktosentrik (BaĢlangıç noktası Samanyolu sisteminin merkezi)
2.1.2 Koordinat Sistemlerinin Eksenleri
Kordinat sistemlerinin eksenlerinin yönlendirilmesi ise birincil(primary) ve
ikincil(secondary) kutuplar(poles), birincil ve ikincil düzlemler(planes) ile birinci, ikinci ve
üçüncü(tertiary) eksen(axes) terimleri ile tanımlanabilirler.
Buna göre;
Birinci Kutup
: Koordinat sisteminin simetri eksenidir. (Örn: Yerin dönme ekseni)
Birinci Düzlem
:Birinci kutba dik düzlemdir.(Örn: Yerin ekvator düzlemi)
Ġkinci Düzlem
: Birinci düzleme dik ve birinci kutbu içinde bulunduran düzlemdir.Bazen
keyfi olarak da seçilebilir. (Örn: Greenwich meridyen düzlemi veya
ilkbahar noktasından geçen (ekinoksal) düzlem)
Ġkinci Kutup
: Birinci ve ikinci düzlemlerin arakesitidir.
Birinci Eksen
: Ġkinci kutup.
Üçüncü Eksen
: Birinci kutup.
Ġkinci Eksen
: Her iki eksene dik ve pozitif yönü sağ el sistemi ya da sol el sistemi
olmasına göre değiĢiklik gösteren eksendir.
Burada bahsedilen sağ el sistemi, sağ el kuralının geçerli olduğu sistemi, sol el sistemi ise sol
el kuralının geçerli olduğu sistemi ifade etmektedir. Yani;
Bir koordinat sisteminin bir ekseni sağ el ile baĢ parmak pozitif yönü gösterecek biçimde
kavrandığında, parmakların yönü koordinat sisteminin diğer eksenlerinin sırasını (X,Y,Z,X)
ve bu eksen etrafında pozitif dönme yönünü gösterir. Sağ el ile bir musluğu baĢ parmak
içeriye doğru kavrarsak, parmakların yönü sıkıĢtırma yönünü gösterir. Sol el kuralıda sol el
ile benzer sonuçları verir.
ġekil 1 Eksen Yönelmeleri, Sağ ve Sol Sistem
2.1.3. Konum Belirleme Parametreleri
ġeklinde ifade edilebilir.
2.2. Yerkürenin Hareketleri ve Koordinat Sistemleri Ġle ĠliĢkisi
2.2.1. Yerkürenin Hareketleri
Yerküre uzayda iki farklı periyodik harekete sahiptir. Bunlardan ilki, kendi ekseni etrafında
dönmesi(rotate), diğeri ise GüneĢ‟in etrafında dönmesidir(revolve).
Bu hareketlerden baĢka üçüncü bir tur periyodik hareket olarak doğal uydumuz Ay‟ın ve
uzayda bulunan çok sayıdaki yapay uydunun yerküre etrafındaki yörüngesel hareketi
sayılabilir. Bu periyodik hareketler, koordinat ve zaman sistemlerinin tanımlanmasının
temelini oluĢturur. Buna göre Yerküre;
1) Kendi ekseni etrafında döner.
2) GüneĢ etrafında döner.
3) GüneĢle birlikte bulunduğu galakside döner.
4) Bulunduğu galaksi ile birlikte diğer galaksilere göre döner.
Ġlk iki hareket jeodeziciler için önemli olup son iki hareket ile astrofizikçiler ya da
astronomlar ilgilenir.
ġekil 3 Yerkürenin GüneĢ Etrafında dönüĢü
Günberi (Perihelion) : Gezegenlerin güneĢe en yakın olduğu an.
Günöte (Apehelion)
: Gezegenlerin güneĢe en uzak olduğu an.
Ekliptik:
Yerin güneĢ etrafında hareketinde izlediği yörüngedir. Bu
yörüngenin oluĢturduğu düzleme de epliktik düzlemi denir. Ekliptike dik olan eksen ekliptik
kutuplarını oluĢtururken, kuzeye yönelen eksen kuzey ekliptik kutbu (North Ecliptic Pole,
NEP) olarak adlandırılır. Yerin dönme ekseni ile ekliptik kutbu arasındaki açı yaklaĢık 23 o
27‟ (bazı kaynaklarda 23o 30‟)‟dır.
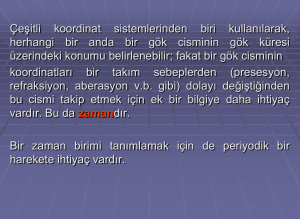
2.2.2. Yerkürenin Yörüngesi ve Gök Küresi ĠliĢkisi
Eğer yer küresi sonsuza geniĢletilirse oluĢan küre Gök Küresi (Celestial Sphere) olarak
adlandırılır.
Yeryuvarının yörünge elipsinin içinde bulunduğu düzleme de yörünge düzlemi denirse,
Yörünge düzleminin gök küresi ile arakesitine Ekliptik Dairesi adı verilir.
Gök küresinin merkezinden geçen ve yeryuvarının dönme eksenine merkezde dik düzlemin
gök küresi ile arakesitine Gök Ekvatoru (Celestial Equator) denir.
Ekvator ve ekliptik daireleri iki noktada kesiĢirler: Ġlkbahar Noktası (ϒ) ve Sonbahar
Noktası (Ω)‟dır. Ġlkbahar ekinoksu (vernal equinox) güneĢin ilkbaharda güneyden kuzeye
geçiĢindeki kesiĢme noktasıdır.
Dünyanın dönme ekseni gök küresini kuzey ve güney gök kutuplarında keser (NCP: North
Celestial Pole, SCP: South Celestial Pole). Gök ekvatoru ile ekliptik arasındaki dar açı
ekliptik eğikliği olarak adlandırılır. YaklaĢık 23.44° değerindedir.
ġekil 4 Gök Küresi ve Yerkürenin Yörüngesi ile ĠliĢkisi
2.2.3. Yerin Dönme Ekseninin Hareketleri
2.2.3.1. Presesyon (Precession)
GüneĢ, ay ve gezegenlerin çekim kuvvetleri yeryuvarının kendi etrafındaki dönüĢünü etkiler.
Bilindiği gibi yeryuvarının ekliptik düzlemi ile ekvator düzlemi çakıĢık değildir ve biçimsel
olarak yeryuvarı homojen olmayan bir dönel elipsoide benzemektedir. GüneĢin yeryuvarına
uyguladığı fakat yeryuvarının güneĢe yakın olan kısmıyla uzak olan kısmının farklı etkisinde
kaldığı çekim kuvvetlerine aynı anda yeryuvarının kendi ekseni etrafındaki dolanımı
nedeniyle oluĢan merkezkaç kuvvetinin de eklenmesiyle yerin dönme (rotasyon) ekseni,
ekliptik ekseni etrafında dolanıma zorlanır ve yerin dönme ekseni bir topaç hareketi yapar.
Tepesi dünyanın ağırlık merkezinde olan ve dairesel bir koniye benzeyen bu hareketi yapan
yerin dönme ekseninin doğrultusu aynı konuma 25765 yılda bir gelir. Bazı kaynaklarda bu
periyod 25800 veya 26000 yıl olarak alınmaktadır. Buna göre ilkbahar noktası ya da yerin
dönme ekseni yılda 360x60x60/25765= 50.3008” lik yer değiĢtirir. (ġekil 5).
ġekil 5 : Presesyon Hareketi
ġekil 6 : Presesyon Etkisinin Dönme Eksenine Etkisi
2.2.3.2 Nutasyon
Yeryuvarının dönme eksenine, güneĢin uyguladığı çekim kuvveti etkisinin(presesyon) bir
benzeri, dünyanın doğal uydusu olan ay tarafından da gerçekleĢtirilmektedir. Buna göre, Ay
yerküre etrafında yerin yörünge (ekliptik) düzlemine 5o11‟ bir eğimle dönmektedir. Ayın
yörünge düzlemini kestiği nokta düğüm(nodal) noktası olarak adlandırılır. Ayın düğüm
noktası aynı konumuna 18.6 yılda bir gelir. Bu periyodik değiĢimler dünyanın yıllık
yörüngesini bozduğu gibi presisyonuda olumsuz etkiler ve dünyanın rotasyon ekseninin
ekliptik kutbu etrafındaki konik hareketin tabanı üzerinde, kutbu 18.6 yıllık periyotlar
halinde sinüsodial bir harekete zorlar. Bu 9.21‟‟ yarıçaplı konik harekete Nutasyon adı
verilir (ġekil 7).
ġekil 6. Nutasyon Hareketi ve Dönme Eksenine Etkisi
Nutasyon 14 gün ile 18.6 yıl periyotlu daha hızlı bir harekettir. (presesyon üzerine binmiĢ
olarak) ġekilde P ile gösterilen dairesel kutup hareketi presesyon, N ile gösterilen (presesyon
üzerinde zikzaklar) nutasyondur.
2.2.4. Kutup Gezinmesi (Kutup Hareketleri)(Polar Motion)
Yukarıda bahsedilenlerin dıĢında, yerkürenin kitlesel dağılımının düzensiz ve dinamik
olması, mevsimsel ve meteorolojik değiĢimler vb. fiziksel etkiler sonucu yerin dönme
ekseninin ya da anlık kutbun yer değiĢtirmesine kutup gezinmesi veya kutup hareketi olarak
adlandırılmaktadır. adı verilir.
Anlık kutbun bu hareketi üst üste bindirilmiĢ iki hareketten oluĢmaktadır. Bunlardan birincisi
yaklaĢık periyodu 435 gün olan serbest presesyon (Chandler Peryodu) hareketi diğeri ise
yeryuvarı kitlesinde, hava ve su akıntıları nedeniyle oluĢan mevsimsel değiĢimlerin neden
olduğu yıllık harekettir. Kutup hareketinden kaynaklanan koordinat değiĢimlerini gidermek
için, bir konvansiyonel yersel kutup (CTP) tanımlamasına ihtiyaç vardır. Bunun için 19001905 yılları arasındaki kutup hareketinin ortalaması, kutup hareketi gözlemleri için baĢlangıç
olarak kabul edilmekte ve böylece Yeryuvarının anlık dönme ekseni, kutup hareketi
parametreleri (xp, yp) kullanılarak CTP‟a referanslanabilmektedir(ġekil 8).
ġekil 8 Kutup Hareketleri
Kutup hareketi parametreleri her yıl IERS(International Earth Rotation Service) tarafından
belirlenerek yayınlanır(Tablo 1).
Tablo1: Kutup Gezinmesi Parametreleri
Tablo değerlerine göre, ortalama kutup aĢağıdaki dönüĢüm eĢitlikleri ile bulunur.
X
X
Y
R 2 (-X P )R1 (-YP ) Y
Z CTRS
Z Anl .TRS
ġekil 9: Ortalama Dönme Ekseni (CIO), Anlık Dönme Ekseni(IT), Kutup
Gezinmesi parametreleri (xP , yP ) ve DönüĢüm eĢitlikleri
ġekilde;
ġekil 10: Presesyon, Nutasyon ve Kutup Hareketlerinin BirleĢik Etkisi
2.3. Kordinat Sistemleri Arasındaki ĠliĢkinin Kurulması(DönüĢümler)
ġekil 11 Koordinat Sistemleri Arasındaki ĠliĢkiler
Ġki koordinat sistemi arasındaki iliĢki, ortogonal transformasyon olarak adlandırılan üç
boyutlu, ölçeğin 1‟e eĢit alındığı dönüĢümler ile sağlanır. Bir koordinat sistemi, koordinat
eksenleri etrafında döndürülerek diğer bir sistemin eksenlerine paralel konuma getirilebilir.
Sonra orijini ötelenerek diğer sistem ile çakıĢtırılır. Bu mekanik hareketlerin matematiksel
ifadesi aĢağıdaki gibidir.
Ortogonal dönüĢüm matrisleri aĢağıdaki özellikleri gösterirler:
x xo
x
y y R R R y
3
o 1 2
z zo
z
Dönüklük parametreleri dıĢında, iki sistem arasında ölçek farklılıklarının da bulunması
uygulamalarda sıkça karĢılan bir durumdur. Geleneksel ölçme tekniklerine dayalı datum
sistemleri (Örn. AD50) ile uydu tekniklerine dayalı jeodezik datum sistemleri (örn. ITRFxx)
arasındaki aykırılıklar buna iyi bir örnektir. Bu durumda dönüĢüm aĢağıdaki Ģekilde
gerçekleĢtirilebilir;
x xo
x
y y 1 m R R R y
1 2 3
o
z zo
z
2.4. Koordinat Sistemlerinin Sınıflandırılması
Yeryuvarının homojen bir yapıya sahip olmaması ve bir takım fiziksel etmenlerden
etkilenmesi, yeryuvarına bağlı bir koordinat sisteminin tanımını güçleĢtirmektedir. Bu zorluk
gerçeğe yakın olmak koĢuluyla, yapay koordinat sistemlerinin tanımlanmasını gerektirmiĢtir.
Klasik yersel gözlemler yeryuvarına dayandığından, fiziksel bir doğa olayı olarak kabul
edilirler ve somut anlamda yeryuvarına bağlı bir koordinat sistemiyle iliĢkilidirler. Bu
nedenle doğal sistemi yok sayarak, yapay sistemi kullanmak ya da onu yeğ tutmak kabul
edilemez. Model koordinat sistemi, fiziksel yeryüzünde yapılan gözlemlerin ilgili referans
sisteme indirgenmesiyle gerçekleĢtirilir.
Bu anlamda, jeodezide kullanabileceğimiz koordinat sistemleri iki ana temele dayanır:
Fiziksel gözlemlere dayanak olan Doğal Koordinat Sistemleri
Hesaplamalara dayanak olan Yapay(Referans) Koordinat Sistemleri.
Her iki durumda koordinat sistemlerinin baĢlangıçları ve eksenlerinin yönleri farklıdır. Bu
sistemler yeryuvarına fiziksel açıdan en çok benzeyen jeoid ve yine yeryuvarına geometrik
açıdan en çok benzeyen dönel elipsoidin datumunu taĢırlar.
Bunlardan ayrı olarak yine yeryüzüne bağlı olmak üzere, uydu ve diğer gök cisimlerinin
koordinatlandırılmasında kullanılan koordinat sistemleri de vardır.
2.4.1. Doğal Koordinat Sistemleri
Fiziksel anlamda var olan, yeryuvarının ağırlık merkezinin ya da yeryüzündeki bir noktanın
baĢlangıç olarak kabul edildiği üç boyutlu dik koordinat sistemleri olarak tanımlanabilir.
Ölçmeciler tarafından yapılan jeodezik gözlemler bu koordinat sistemleriyle iliĢkilidir.
Sistemin baĢlangıç noktasının yeryuvarının ağırlık merkezinde ya da yeryüzündeki bir
noktada seçilmesi, tanımlanacak nesnelere bağlıdır. Bir ülke veya yeryuvarı ölçmesi
yapılacaksa ağırlık merkezli koordinat sistemi, yerel anlamda küçük bir bölge ölçmesi
yapılacaksa yeryüzündeki bir noktanın merkez olarak kabul edildiği koordinat sistemi
kullanılır.
2.4.2. Referans Koordinat Sistemleri
Matematiksel olarak ifade edilemeyen yeryüzünün ve bu yüzeyde gerçekleĢen çeĢitli doğa
olaylarının etkisindeki gözlemlerin, oluĢturulacak koordinat sistemlerinde değerlendirilmesi
son derece zordur. Bu sistemlerin kullanılması, bozucu etkilerin yeterli doğrulukla
modellendirilebilmesi durumunda olanaklıdır Ancak karmaĢık yeryüzü modellendirilse bile
bu, ona geometrik açıdan çok benzeyen dönel elipsoitten daha sade bir yüzey olmayacak ve
matematiksel ifadeler daha karmaĢık hale gelecektir.
YaĢanan bu güçlük, ancak yeryuvarına çok benzeyen, matematiksel olarak kolay ifade
edilebilen bir yüzeyle çözülebilir. Jeodezinin tarihsel geliĢimi içerisinde bu konu hep güncel
kalmıĢtır. Yeryuvarı yerine kutuplarda basık bir meridyen elipsinin kendi etrafında
döndürülmesiyle oluĢan dönel elipsoidin kullanılması gerektiği anlaĢılmıĢtır. Yapılan
hesapların bu yüzeye dayandırılması nedeniyle yapay koordinat sistemlerinin de elipsoide
göre tanımlanması gerekir.
Yine aynı Ģekilde; üç boyutlu kartezyen koordinatlar (X,Y,Z) kullanılarak, tüm geometrik
problemler çözülebilir ve üç boyutlu koordinatlarla topoğrafya modellenebilir. Ancak, üç
boyutlu mekansal bilginin kullanılması sınırlıdır.
Ġnsanlar, topoğrafyayı ve çevrelerini ufka göre algılarlar. Bu nedenle, mekansal bilgilerinde
(örneğin harita ve planların) ufuk algısına uygun olması gerekir. Bu nedenle, 3 boyutlu
sistemler hesaplamalarda kullanılmakla birlikte, görselleĢtirme, mühendislik, aplikasyon,
v.b. çalıĢmaları için , yatay 2 boyut ve yükseklik (düĢey) 1 boyut olmak üzere 2+1 boyut
kullanılır.
Bu yaklaĢıma göre; Yer yuvarının gerçek Ģekli topografik yüzeyinin oluĢturduğu Ģekildir ve
bu yüzeyin 2+1 boyutla geometrik ifadesi için izdüĢüm veya referans yüzeyleri gereklidir.
Tarihsel geliĢim içinde ölçmelerdeki doğruluk artıĢına da bağlı olarak referans yüzeyleri
değiĢmiĢtir. Örneğin küçük alanlarda(Ģantiye ölçmelerinde) referans yüzeyi düzlem
alınmıĢtır.
Daha sonraları, yer yuvarının Ģekline uyan, küre, dönel elipsoit ve jeopotansiyel yüzey
referans yüzeyi olarak kullanılmıĢtır. Bu Ģekilde, fiziksel yer üzerinde yapılan ölçümler
referans yüzeyine indirgenmekte ve referans yüzeyinin geometrisine uygun olarak
değerlendirilmektedir.
Örnek vermek gerekirse; Yersel koordinat koordinat sistemlerine göre tanımlanan konumlar,
genel olarak coğrafi konumlar olarak adlandırılır. Kullanılan referans yüzeyine göre
koordinatlar;
Referans yüzeyi düzlem alındığında Düzlem Koordinatlar ,
Referans yüzeyi küre alındığında Küresel Koordinatlar,
Referans yüzeyi dönel elipsoit alındığında Elipsoidal(Jeodezik) Koordinatlar,
Referans yüzeyi jeopotansiyel yüzey alındığında Astronomik(Doğal) Koordinatlar
olarak adlandırılır.
Jeodezide, yukarıdaki tanımlara uygun çok sayıda koordinat sistemi tanımlanabilir. Ancak,
uluslararası birliğin sağlanması için bu sistemlerden bazıları temel sistem veya referans
sistemi olarak belirlenir.
Bir koordinat referans sistemi; koordinat sistemi ve referans yüzeyinden oluĢur. Referans
yüzeyinin koordinat sistemi ile iliĢkilendirilmesi datum parametreleri ile sağlanır.
Örneğin,Türkiye‟de ITRS koordinat sistemi ve GRS-80 datumu kullanılarak mekansal
konum bilgileri üretilmektedir. Burada, ITRS; uluslararası yersel koordinat sistemi ve
GRS-80; 1980 yılında uluslararası kuruluĢlar tarafından parametreleri belirlenen jeodezik
referans sistemi‟dir. GPS sisteminde ise koordinatlar WGS-84‟e göre belirlenmektedir. Bu
sistem, bir koordinat sistemi ile referans yüzeyinden oluĢan tek koordinat referans sistemidir.
Bütün bu açıklamaların sonucunda, jeodezik problemlerin yapılarına göre bir çok koordinat
sistemi oluĢturulması ve kullanılması mümkündür. Ancak en genel anlamda koordinat
sistemleri üç ana baĢlıkta toplanabilir. Bundan sonraki konularda bu baĢlıklar incelenecektir.
a) Göksel (Celestial) Koordinat Sistemleri (GKS)
b) Yersel (Terrestrial) Koordinat Sistemleri (YKS)
c) Yörüngesel (Orbital) Koordinat Sistemleri (OKS)
Zaman koordinatı ise bu üç sistemi birbirine bağlar. Zaman, sistemlerin hareketlerini izler ve
böylece sistemler dinamik sistemlere dönüĢür.
ġekil 12: Koordinat Sistemlerinin Sınıfladırılması
3. KOORDĠNAT SĠSTEMLERĠ ÇEġĠTLERĠ
3.1 Göksel Koordinat Sistemleri
Göksel koordinat sistemleri, yer yuvarı da dahil gök cisimlerinin (yıldızlar,galaksiler,
gezegenler, güneĢ, ay v.b) konumlarını belirlemek için tanımlanan sistemlerdir. Bu sistemler,
yer yuvarı ile birlikte dolanan ancak dönmeyecek biçimde tanımlanmıĢtır. Yani, sistemlerin
orijini ötelenir ancak eksenleri dönmez. Bu nitelikteki sistemlere inersiyal sistemler denir.
Göksel koordinat sistemlerinin tanımlanabilmesi için GÖK KÜRESĠ yaklaĢımı kullanılır.
Gök küresi yaklaĢımı ile, yer yuvarının gerçek hareketi yerine görünen hareketleri ele alınır.
Tüm gök cisimleri, gözlem yapılan yeryüzü noktalarından yerin yarıçapının milyonlarca katı
kadar uzaklıktadır. Astronomik gözlem yapılan gök cisimlerinin sonsuz uzaklıkta
bulunmaları nedeniyle bunların uzaklıkları değil de birim yarıçaplı küre üzerindeki
izdüĢümleri esas alınarak bunlar arasındaki doğrultularla ilgilenilir. Dolayısıyla bu
sistemlerin tümünün orijinleri jeosentrik veya toposentrik olabilir ve sistemler arasında
ayrım yapılmaz.
Bunları ayrı alırsak aĢağıdaki tanımlamaları yapabiliriz;
ġekil 13 Gök Küresi ve Elemanları
Gök Küre
Merkezi yerin ağırlık merkezi olan ve yarıçapı sonsuz olan küreye denir. Böylece yeryuvarı
bu kürenin içinde bir nokta olarak ve gözlem noktası ile yerin merkezi özdeĢ olarak
düĢünülebilir.
Gök Kutupları
Yerin dönme ekseninin gök küresini deldiği noktalar kuzey ve güney kutup noktalarıdır.
Gök Ekvatoru
Yerin ağırlık merkezinde yerin dönme eksenine dik düzlem ile gök kürenin ara kesitidir.
Saat Daireleri
Gök kutup noktalarından geçen büyük dairelerdir. S gök cisminin gök küre üzerindeki
izdüĢüm noktasından ve gök kutuplarından geçen büyük daireye S gök cisminin saat dairesi
denir.
Deklinasyon Daireleri
Gök ekvatoruna paralel küçük daireler Deklinasyon daireleridir.
BaĢucu (Zenit) ve Ayakucu (Nadir) Noktaları
Yeryüzündeki gözlem noktasındaki Çekül doğrultusunun (düĢey doğrultunun) gök küresini
deldiği noktalardır.
Ufuk Dairesi
Gözlem noktasından geçen çekül doğrultusuna (düĢey doğrultuya) yerin merkezinde (veya
gözlem noktasında) dik olan düzlemle (ufuk düzlemi=yatay düzlem) gök küresinin
arakesitine denir. Ufuk dairesinin kutup noktası baĢucu noktasıdır.
DüĢey Daireler
BaĢucu ve ayakucu noktalarından geçen ve ufuk düzlemine dik olan büyük dairelerdir.
Yükseklik Daireleri
Ufuk düzlemine paralel olan küçük dairelerdir.
Gök Meridyeni
Gözlem noktasından geçen çekül doğrultusunu içinde bulunduran ve gök kutuplarından
geçen düzlemle gök küresinin arakesitine gözlemcinin meridyeni denir. BaĢka bir ifadeyle
BaĢucu noktasından geçen saat dairesine denir.
Kuzey ve Güney noktaları
Meridyen dairesi ufuk dairesini iki noktada keser. Bunlardan kuzey gök kutbuna daha yakın
olan Kuzey diğeri Güney noktalarıdır.
Birinci DüĢey Daire
Meridyen düzlemine dik olan düĢey daireye denir.
Doğu ve Batı Noktaları
I. DüĢey dairenin gök ufku ile kesiĢtiği noktalar DOĞU ve BATI noktalarıdır. Kuzeye
dönüldüğünde sağdaki nokta doğu diğeri batı noktasıdır.
Ekliptik ile Ġlgili Tanımlar
Ekliptik Dairesi
GüneĢin yörünge düzleminin (Ekliptik düzlemi) gök küresi ile arakesitine denir.
Ekliptik paraleli
Ekliptiğe paralel olan küçük dairelere denir.
Ekliptik kutupları
Gök küre üzerinde, ekliptik düzleme dik olan doğrunun gök küresini kestiği noktalardır.
Ekliptik Meridyeni
Ekliptik kutuplarından geçen büyük dairelerdir.
Ġlkbahar ve Sonbahar Noktaları
Ekliptik dairesi gök ekvatorunu iki noktada keser. Bunlardan birisine ilkbahar, diğerine
sonbahar denir.
Not: Yerin dönme ekseni ve ekliptik düzlemi sürekli değiĢir. Bunlara bağlı olarak
tanımlanan noktalar ve düzlemlerde değiĢir. Ekliptik ekseni ilkbahar ve sonbahar
noktalarının değiĢmesi bazı karıĢıklıklara neden olur. Bunu önlemek için belirli bir zamana
karĢılık gelen bazı referanslar tanımlanır. Örneğin 1950 Epoğu, 1900 Epoğu veya 2000
Epoğu gibi. Jeodezik ve Astronomik problemlerde bu değiĢimler dikkate alınmalıdır. Bunun
dıĢında, göksel(astronomik) koordinat sistemlerinde açısal büyüklüklerin genellikle derece
cinsinden verildiği, ancak bazı açıların saat cinsinden verildiği unutulmamalıdır.
3.1.1. Göksel Ekliptik Sistemi (E)
BaĢlangıç Noktası: GüneĢin ağırlık merkezidir (Heliocentric).
Birinci Kutup
: Göksel ekliptik kutbu (CEP, Celestial Ecliptic Pole).
Birinci Düzlem : Ekliptik düzlemi (Yerkürenin yörünge düzlemi)
Ġkinci Düzlem
: Ġlkbahar noktasının ekliptik meridyen düzlemi
Ġkinci Kutup
: Ġlkbahar noktasının ekliptik meridyen düzlemi ve ekliptik düzleminin
arakesiti
Birinci Eksen
Üçüncü Eksen
Ġkinci Eksen
: Ġlkbahar noktası ekliptik meridyen düzlemi ve ekliptik düzleminin ara
kesiti (X ekseni)
: Göksel ekliptik kutbu (CEP, Celestial Ecliptic Pole). (Z ekseni)
: Sistem sağ (el) sistem oluĢturulacak biçimde seçilir (Y ekseni)
Bu sistemde, gök küresi üzerinde bulunan herhangi bir S noktası, ekliptik enlemi ve ekliptik
boylamı ile tanımlanır.
Ekliptik Enlemi (β)
Ekliptik dairesinden itibaren Ekliptik meridyeni boyunca S gök cismine kadar olan yay
uzunluğu veya bu yayı baĢlangıç noktasında gören açı olup (-90o<β<90o ) arasında değiĢir.
Ekliptik Boylamı (λ):
S noktasının ekliptik meridyen düzlemi ile ilkbahar noktası ekliptik meridyen düzlemi
arasındaki açıdır ve ilkbahar noktasından itibaren doğuya doğru 00-3600 arasında değer alır.
Ekliptik sistemi, yıldızlara göre hareketsiz olan inersiyal (inertial) sisteme en yakın olan bir
sistemdir. Bu nedenle yıldız kataloglarının düzenlenmesi için uygundur. Bir S gök cisminin
gök sistemindeki birim vektörü aĢağıdaki gibi verilir;
x
cos cos
y cos sin
z
sin
E
3.1.2 Göksel Ufuk Koordinat Sistemi
BaĢlangıç Noktası: GüneĢin ağırlık merkezidir (Heliocentric).
Birinci Kutup
: Gözlemciden geçen çekül doğrultusunun (g). Gök küreyi deldiği nokta.
Birinci Düzlem : Gök Ufuk düzlemi (çekül doğrultusuna dik düzlem)
Ġkinci Düzlem
: Gözlemciden geçen, Göksel meridyen düzlemi (çekül doğrultusu ve
yerin dönme eksenini içinde bulunduran düzlem)
Ġkinci Kutup
: Gözlemciden geçen, Göksel meridyen ve Gök ufuk düzlemlerinin
arakesiti
Birinci Eksen
: Gözlemciden geçen, Göksel meridyen ve gök ufuk düzlemlerinin
Arakesit doğrusu (X ekseni)
Üçüncü Eksen : Gözlemciden geçen çekül doğrultusu (g). (Z ekseni)
Ġkinci Eksen
: Sistem sol (el) sistem oluĢturulacak biçimde seçilir (Y ekseni)
Bu sistemde, gök küresi üzerinde bulunan herhangi bir S noktası, yükseklik (altitude) ve
azimut (azimuth) ile tanımlanır.
Astronomik azimut(a):
Gözlem yeri meridyeni ile S gök cisminden geçen düĢey daire düzlemi arasında saat ibresi
yönünde ölçülen açıklık açısı olup, 0o<a<360o arasında değiĢir.
Yükseklik açısı (h): Yataydan (ufuk düzleminden) itibaren S gök cismine kadar, S gök
cisminin düĢey dairesinde -90o<z<+90o arasında ölçülen açıdır. Tümleyen açısı olan z (90-a)
baĢucu uzaklığı (zenith distance) veya baĢucu açısı olarak adlandırılır.
Ufuk sistemi bir gök cisminin konumunu özel olarak toposentrik (topocentric) olarak duran
gözlemciye göre tanımlar. Bu sistem yersel sistemlerde yerel astronomik sisteme benzer.
BaĢlıca fark, ufuk sisteminin baĢlangıcı toposentrik değil heliocentrictir. Bir S gök cisminin
gök sistemindeki birim vektörü aĢağıdaki gibi verilir;
x
cosh cos a
y cosh sin a
z H sinh
3.1.3. Göksel Saat Açısı (Hour Angle) Koordinat Sistemi (I. Ekvator Sistemi)
BaĢlangıç Noktası: GüneĢin ağırlık merkezi (Heliocentric).
Birinci Kutup
: Yerin dönme ekseni doğrultusu (// CIO).
Birinci Düzlem : Ekvator düzlemi
Ġkinci Düzlem
: Gözlemciden geçen göksel meridyen(Saat dairesi) düzlemi (çekül
doğrultusu ve yerin dönme eksenini içinde bulunduran düzlem)
Ġkinci Kutup
: Gözlemciden geçen göksel meridyen düzlemi(Saat dairesi) ile ekvator
düzleminin arakesiti.
Birinci Eksen
: Gözlemciden geçen göksel meridyen (Saat dairesi) düzlemi ile ekvator
düzleminin arakesit doğrultusu (X ekseni)
Üçüncü Eksen : Yerin dönme ekseni doğrultusu (// CIO). (Z ekseni)
Ġkinci Eksen
: Sistem sol (el) sistem oluĢturulacak biçimde seçilir (Y ekseni)
Bu sistemde, gök küresi üzerinde bulunan herhangi bir S noktası, deklinasyon (declination)
ve saat açısı (hour angle) ile tanımlanır.
Deklinasyon (Yükselim Açısı) (δ):
Ekvator dairesinden itibaren saat dairesi boyunca S gök cismine kadar olan mesafe olup,
(-90o<δ <90o ) arasında ölçülen açıdır.
Saat Açısı (t):
Bu açı Gözlem yeri meridyeninden(saat dairesi) itibaren saat ibresi yönünde S gök cismine
ait saat dairesine kadar ölçülen açı olup (0o<t<360o ) veya (0h<t<24h) dir.
Saat açısı koordinat sistemi aynı ufuk koordinat sistemi gibi gözlemciye bağlı koordinat
sistemidir ve gözlemci ile birlikte döner. Bir S gök cisminin gök sistemindeki birim vektörü
aĢağıdaki gibi verilir;
x
cos cos t
y cos sin t
z HA sin
3.1.4. Rektasensiyon (Right Ascension-Sağa Açılım) Koordinat Sistemi
(II. Ekvator Koordinat Sistemi)
BaĢlangıç Noktası: GüneĢin ağırlık merkezi (Heliocentric).
Birinci Kutup
: Yerin dönme ekseni doğrultusu (// CIO).
Birinci Düzlem : Ekvator düzlemi
Ġkinci Düzlem
: Ġlkbahar noktası () göksel meridyen düzlemi.
Ġkinci Kutup
: Ġlkbahar noktası göksel meridyen düzlemi ve ekvator düzlemlerinin
arakesiti
Birinci Eksen
: Ġlkbahar noktası göksel meridyen düzlemi ve ekvator düzlemlerinin
arakesit doğrultusu (X ekseni)
Üçüncü Eksen : Yerin dönme ekseni doğrultusu (// CIO). (Z ekseni)
Ġkinci Eksen
: Sistem sağ (el) sistem oluĢturulacak biçimde seçilir (Y ekseni)
Bu sistemde, gök küresi üzerinde bulunan herhangi bir S noktası, deklinasyon (declination)
ve sağ açılım (rektasensiyon) ile tanımlanır.
Deklinasyon (Yükselim Açısı) (δ):
Ekvator dairesinden itibaren saat dairesi boyunca S gök cismine kadar olan mesafe olup,
(-90o<δ <90o ) arasında ölçülen açıdır.
Rektasensiyon (Sağ Açılım Açısı) ():
Ekvator düzleminde, ilkbahar noktasından geçen saat dairesi ile S gök cismine ait saat
dairesine kadar doğuya doğru tanımlanan açı olup (0h<t<24h) arasında ölçülür.
Sağ açılım sistemi en önemli gök koordinat sistemidir. Yıldız ve uyduların koordinatları bu
sistemde yayınlanır. Yersel, göksel ve uydusal koordinat sistemleri arasında bağ oluĢturur.
Bir S gök cisminin gök sistemindeki birim vektörü aĢağıdaki gibi verilir;
x
cos cos
y
cos sin
z
sin
RA
3.1.5. Göksel Koordinat Sistemleri Arasındaki ĠliĢkiler
3.2.5.1 Rektasensiyon (RA) , Ortalama Yersel (CT) ve Saat Açısı (HA) Sistemleri
arasındaki iliĢki
ġu ana kadar gök küresi üzerinde 4 adet özel meridyen tanımı yapılmıĢtır. Bunlar;
Ġlkbahar noktasını içeren gece ve gündüzün eĢit olduğu meridyen.
Greenwich Gök Meridyeni
Gözlemcinin bulunduğu noktayı içeren göksel meridyen
Gök cismini (Yıldız) içine alan saat dairesidir.
Bu meridyenler arasındaki iliĢkileri oluĢturmak için gök ekvatoru üstünde ilkbahar
noktasından saat ibresinin tersi yönde hareket edilirse:
a.
b.
c.
d.
e.
Greenwich meridyenine doğru oluĢan açı:Greenwich Yıldız Zamanı (GST=Greenwich
Sidereal Time),
Gözlemci gök meridyenine doğru oluĢan açı: Yerel Yıldız Zamanı (LST=Local
Sidereal Time),
Saat dairesine kadar olan açı : Sağ Açılım (RA) açısı veya Rektasensiyon() ,
Greenwich meridyeninden saat ibresinin tersi yönde gözlemci gök meridyenine kadar
olan açı: Astronomik Boylam (),
Gözlemci gök meridyeninden saat ibresi yönünde saat dairesi arasındaki açı: Saat
Açısı (h) adı verilir.
Yukarıdaki Ģekillerden de yararlanarak kolayca Ģu eĢitlikler yazılabilir;
LST=GST +
LST= h +
h= GST + -
Yerel yıldız zamanı (LST) yardımıyla saat açısı sistemi ile sağ açılım sistemi arasında
x
y
P2 R 3 (LST )
z
HA
1 0 0
P2 0 - 1 0
0 0 1
x
y
z
RA
3.2.5.2 Rektasensiyon (RA) ile Ekliptik Sistemi ĠliĢkisi
Sağ açılım sistemi ile ekliptik sistemi arasındaki iliĢki, ekvator ile ekliptik düzlemi
arasındaki eğim açısı ile Ģöyle kurulur:
x
y
R1 (-)
z
RA
x
y
z
E
3.2.5.3 Ufuk (H) ve Saat Açısı (HA) Sistemleri Arasındaki ĠliĢki
Ufuk sistemi ile saat açısı sistemi arasındaki iliĢki astronomik enlemle kurulur:
x
y R (180 )R (90 - )
3
2
z
H
x
y
z
HA
3.2.6 Rektasensiyon(RA) Sistemindeki DeğiĢimler
Daha öncede belirtildiği gibi gök küresi yaklaĢımı ile duyarlı bir çalıĢma yapılırken bazı
düzeltmelere ihtiyaç duyulur. Bunlar, yıldızların öz hareketi (proper motion), prezesyon ve
nutasyon, aberasyon, paralaks ve ıĢın kırılması (refraction) nedeniyle oluĢur. Bu düzeltmeler;
gözlemin yapıldığı T anındaki (T anındaki gözlem yeri sistemi) sistem ile en mutlak sağ
açılım(rektasensiyon) sistemi olan (Standart T0 anındaki Ortalama Göksel Sistem) sistem
arasında 4 aĢamada uygulanır. Bu aĢamalar sırasında oluĢan yeni koordinat sistemleri
aĢağıdaki Ģekilde isimlendirilir:
a
b
c
d
e
T0 anındaki Ortalama Göksel Sistem, MRA(T0)
T anındaki Ortalama Göksel Sistem, MRA(T)
T anındaki Gerçek Göksel Sistem, TRA(T)
T anındaki Görünen Yer Sistemi (Apparent Place System at epoch T), AP(T)
T anındaki Gözlem Yer Sistemi (Observed Place System at epoch T), OP(T)
Bu 5 sistem arasındaki bağlantı aĢağıdaki Ģekilde gösterilmiĢtir. Bu koordinat sistemlerinin
ilk üç tanesi koordinat sistemlerinin hareketleriyle iliĢkili, son ikisi tanesi ise gök cisminin
konumunun değiĢmesine neden olan fiziksel etkiler ile iliĢkilidir.
4. ZAMAN SĠSTEMLERĠ
Evrenin yapı taĢlarından biri olan zaman; içinde bir olayın veya ardıĢık olayların
gerçekleĢtiği boyut olarak tanımlanmaktadır. Dolayısıyla konum ve nitelik yönünden
değiĢtiği bilinen ve değiĢimi gözlenmek istenen her olay ya da nesne için zamanın
kaydedilmesi gerekir.
Zamanın ölçeklendirilmesinde gözlemlenmesi gereken hareket sürekli ve düzenli (periyodik)
olmalıdır. Çok eskilerden beri bu ölçeklendirme için doğal olaylar kullanılmaktadır. Bu
anlamda değerlendirilebilecek bazı doğa olayları;
Yerin kendi ekseni etrafındaki GÜNLÜK dönme (Rotasyon) hareketi,
Yerin güneĢ etrafındaki YILLIK dolanımı,
Ay‟ın yeryuvarı etrafındaki AYLIK dolanımı,
Nükleer fizikte bazı atomların temel özelliklerine dayalı fiziksel ve süreçlerdir.
Bu düzenli ve periyodik hareketlere dayalı olarak aĢağıda Ģekilde gösterildiği gibi bir çok
zaman sistemi geliĢtirilmiĢtir. Ancak unutulmaması gereken daha önceki konularda da
değinildiği gibi bu hareketlerin periyotları çeĢitli etkiler nedeniyle az da olsa değiĢime
uğrarlar ve sistemler içerisinde ideal zaman ölçü birimleri yerine ideale çok yakın zaman
ölçü birimleri kullanılır.
4.1 Yıldız GeçiĢleri
Zaman sistemlerini anlayabilmek için göksel koordinat sistemleri içerisinde yıldızların özel
konumlarını bilmemiz gerekir. Bunlardan en önemlisi yıldızların meridyen geçiĢleridir. Buna
göre 24 saatlik süre içerisinde bir gök cismi meridyen düzlemini iki kez kesmektedir. Bu
durumlara, meridyen geçiĢleri adı verilir. Bu iki geçiĢten biri diğerine göre BAġUCU
noktasına daha yakındır. BaĢucu açısının daha küçük olduğu meridyen geçiĢine ÜSTGEÇĠġ , diğerine de ALT-GEÇĠġ adı verilmektedir.
4.2. Dünyanın Kendi Ekseni Çevresindeki Harekete Göre Zaman Birimleri
4.1.1. Yıldız Zamanı (Sideral Time-ST)
Herhangi bir yerdeki yıldız zamanı (θ) o andaki ilkbahar noktasının saat açısı ile ölçülür.
t (Yıldız Zamanı) S yıldızı üst geçiĢte bulunduğu sırada t=0 olacağından, o yerin
yıldız zamanı, yıldızın rektesensiyonuna (α) eĢittir.
Ġlkbahar noktasının bir gözlem yeri meridyeninden arka arkaya iki üst geçiĢi arasında geçen
süreye de bir Yıldız Günü denilir. Ancak, presesyon ve nutasyon nedeniyle ilkbahar noktası
yer değiĢtirdiği için bir yıldız günü, dünyanın kendi ekseni çevresindeki bir tam dönüĢünden
0.0084s daha kısadır.
Gerçek ilkbahar noktasının konumuna bağlı olarak tanımlanan yıldız zamanına
Görünen(Gerçek) Yıldız Zamanı () adı verilir. Eğer, ekinoks denklemi ile ifade edilen
nutasyon terimi , gerçek yıldız zamanından kaldırılırsa Ortalama Yıldız Zamanı
bulunur
ve
Yıldız almanaklarında
ekinoks denklemi N‟ uzun ve N” kısa periyotlu nutasyon
değerleri olarak verilmektedir. Astronomik gözlemlerin değerlendirilmesinde Gerçek Yıldız
Zamanı () kullanılırken, yıldız zamanı için referans ölçeğin oluĢturulmasında Ortalama
Yıldız Zamanı göz önüne alınmaktadır.
4.1.2 GüneĢ Zamanı
Günlük yaĢamımızdaki zaman güneĢin görünen hareketiyle ilgilidir. Buna göre, bir yerin
güneĢ zamanı, güneĢin bulunduğu noktadan, görünen hareketin ters yönünde meridyen alt
geçiĢine olan uzaklık olarak tanımlanır ve ifadesiyle gösterilir. GüneĢ Günü ise, güneĢin
gözlem yeri meridyeninden ardıĢık iki alt geçiĢi arasındaki süreye eĢittir.
GüneĢ Zamanı () = GüneĢin Saat Açısı (t) + 12
h
GüneĢ dünyaya göre ekliptik üzerinde değiĢik hız ve deklinasyon değerleri ile hareket
ettiğinden, gerçek güneĢ günü yıl içerisinde farklı sürelerde gerçekleĢmektedir. GüneĢe bağlı
ideal bir zaman birimi oluĢturmak için güneĢin Gök ekvatoru üzerinde sabit bir hızla hareket
ettiği varsayılarak, Ortalama GüneĢ tanımı yapılır. Ortalama güneĢin ortalama ilkbahar
noktasından kalkıp tekrar ortalama ilkbahar noktasına gelinceye kadar geçen süre, gerçek
güneĢin ortalama ilkbahar noktasından iki geçiĢi arasındaki süreye eĢittir. Ortalama güneĢin
bir yerin meridyeninden iki alt geçiĢi arasındaki süreye de Ortalama GüneĢ Günü adı
verilir. Ortalama ilkbahar noktasından baĢlamak üzere, gerçek güneĢin ekliptik yörüngesinde
bir tam dolanımını gerçekleĢtirdiği süreye Tropik Yıl adı verilir ve buna göre ortalama
güneĢ günü 1 tropik yıl süresinin 1/365.2422 katı olarak ifade edilebilir.
4.1.3 Zaman Denklemi
Gerçek güneĢ zamanı ile ortalama güneĢ zamanı arasındaki iliĢki zaman denklemi ile ifade
edilir. Buna göre;
Zaman Denklemi (E) = Gerçek GüneĢ Zamanı () - Ortalama GüneĢ Zamanı()
Diğer yandan, t , α ve t ,
rektasensiyonu olmak üzere;
Olur.
α
sırasıyla gerçek ve ortalama güneĢin saat açısı ve
Kısacası zaman denklemi kolumuzdaki saat ile güneĢin gerçek konumuna göre tanımlı
zaman arasındaki fark olarak görülebilir. Zaman Denklemi;
E= 9.87 Sin(2B) – 7.53Cos(B) – 1.53Sin(B)
B=3600(N - 81) / 364
eĢitliği ile ifade edilebilir. Burada N (=1,2,3,…..) 1 Ocak‟tan itibaren gün sayısını gösterir.
Zaman denklemi bir yıl boyunca -14.2dk ile +16.3dk arasında değiĢir. Günlük değeri bu
amaçla düzenlenmiĢ almanaklardan elde edilebilir.
4.1.4 Yıldız Zamanı ile GüneĢ Zamanı Arasındaki ĠliĢki
Dünyanın kendi ekseni çevresinde ve güneĢin çevresinde dolanımı sırasında bir A noktasının
konumunu düĢünecek olursak, A noktasının ikinci kez aynı doğrultuya gelmesi sonunda bir
yıldız günü geçmiĢ olacaktır. Oysa bu nokta güneĢ doğrultusunu bir süre geçtikten sonra
olabilecektir. BaĢka bir deyiĢle yıldız günü henüz tamamlanmamıĢtır.
Bu açı yaklaĢık; (3600/365,..gün) 10 olduğuna göre, bu iki tanımlanmıĢ gün arasında
yaklaĢık 4m bir fark oluĢacaktır.
Ortalama ilkbahar noktasından baĢlamak üzere, gerçek güneĢin ekliptik yörüngesinde bir tam
dolanımını gerçekleĢtirdiği süre olan Tropik Yılı, Ortalama GüneĢ Günü ve Ortalama Yıldız
Günü cinsinden ifade edersek;
1 tropik yıl = 365,24220 ortalama güneĢ günü
1 tropik yıl = 366,24220 ortalama yıldız günü
Ġfadelerini elde ederiz. Buradan;
Bir Ortalama GüneĢ Günü= (366.2422/365.2422 ) Ortalama Yıldız Günü
Bir Ortalama GüneĢ Günü=(1+(1/365.2422)) Ortalama Yıldız Günü yazılabilir.
Buna göre;
4.1.3 Evrensel Zaman (Dünya Zamanı) (GMT, UT, UT0, UT1 ve UT2)
Astronomik dünya zamanı (UT=Universal Time) veya Greenwich ortalama zamanı (GMT)
olarak adlandırılır. Gök ekvatoru üzerinde sabit bir açısal hızla hareket eden güneĢe göre
(Ortalama güneĢ) yerin kendi ekseni etrafındaki dönüĢünü yansıtan bir zaman türüdür. Buna
göre; UT veya GMT ortalama güneĢin, Greenwich ortalama meridyeni ile yaptığı saat
açısıdır. UT‟ye göre de dünyada kullanılan diğer bölgesel zaman dilimleri tanımlanır.
UT0 astronomik gözlemlerden doğrudan doğruya elde edilmiĢ (kutup gezinimi için
düzeltilmemiĢ) büyüklük olarak göz önüne alınır.
UT1 ise gözlem noktasında UT0‟a kutup gezinimi nedeniyle boylam düzeltmesi getirilerek
bulunur. Günlük yaĢam için ideal zaman ölçütüdür.
UT2 yeryuvarının dönüĢ hızında yıllık ve yarıyıllık olarak gözlenen değiĢimlerin UT1‟de
düzeltilmesi ile elde edilir. Bilimsel amaçlar dıĢında pratik bir önemi yoktur. AĢağıdaki
Ģekilde, yeryuvarının kendi ekseni etrafındaki dönüĢ hızındaki düzensizlik nedeniyle farklı
gün sürelerindeki değiĢiklikler görülmektedir.
4.1.3.1 UT1, GMST1, JD
UT1 Ve GMST1 arasındaki iliĢki;
0 GMST10 24110s.54841 8640184s.812866Tu 0s.093104Tu2 6 / 2 106 Tu3
EĢitliği ile tanımlanır. Burada;
Tu JD UT1 2451545.0 / 36525
J2000.0‟dan itibaren Jülyen yüzyılıdır. JD tarihi (M.Ö.) 1 Ocak. 4713 UT1=12 h den
baĢlayarak belirtilen bir tarihe kadar gün süresidir. D gün, M ay ve Y yıl olmak üzere Jülyen
tarihi,
M 2 ise y = Y-1 ve m = M+12
M > 2 ise y =Y
ve m=M
Olmak üzere;
JD INT 365.25 y INT 30.6001 m 1 D (UT1/ 24) 1720981.5
Bağıntısından hesaplanabilir.
4.1.3.1 Takvim Zamanı
Uygulamada takvim gününü gece yarısından baĢlatmak uygun olur. Böylece ortalama GüneĢ
zamanına göre çalıĢan bir saat ortalama gece yarısında 0sa‟i gösteriyorsa bu saat bize takvim
zamanını bildirmektedir. O halde takvim zamanı ortalama GüneĢ‟in saat açısına +12sa
eklenerek bulunur. Buna Yerel zamanda denir.
4.1.3.2 Bölge Zamanı
Greenwich baĢlangıç meridyeninden itibaren eĢit aralıklı 24 tane standart meridyen ve bunlar
yardımı ile de 24 tane saat dilimi tanımlanmıĢtır. Buna göre komĢu iki standart meridyen
arasındaki açı 15‟dir. Bir standart meridyenin 730‟ sağından ve solundan geçen
meridyenlerle sınırlanan bölgeye o standart meridyene ait saat dilimi denir. Aynı saat
diliminde bulunan yerler aynı ortalama GüneĢ zamanını kullanır bu zamana bölge zamanı
denir.
Türkiye‟de, biri Ġzmit civarında (30‟lik doğu standart meridyeni ) diğeri de Erzurum
civarında (45„lik doğu standart meridyeni ) olmak üzere iki standart meridyen geçmektedir.
Bu sebepten Türkiye de farklı iki saatin kullanılması gerekirken ulaĢım ve haberleĢmede
kolaylık sağlamak amacı ile bütün Türkiye için Ġzmit civarından geçen standart meridyen
kullanılmaktadır. Yaz aylarında ise saatler bir saat ileri alınmaktadır. Bu yeni zamana
Türkiye yaz saati denir.
Greenwich baĢlangıç meridyeni ile tanımlanan bölge zamanı için genel zaman veya
Universal zaman terimi kullanılır ve (UT) veya (GMT) olarak gösterilir. Bu Ģekilde
tanımlanan bölge zamanı çoğu zaman standart zaman olarak ta adlandırılır.
4.2 Dünyanın GüneĢ Etrafındaki Kendi Ekseni Çevresindeki Harekete Göre Zaman
Birimleri
4.2.1. Efemeris Zamanı (ET)
Yer‟in GüneĢ etrafındaki hareketine dayanan zaman ölçeği Efemeris Zamanı (gökgünlüğü
zamanı) olarak adlandırılır ve (ET) olarak gösterilir. ET dinamik astronomi için kurulmuĢ
olup almanaklarda bazı zaman değerleri ET zamanı cinsinden verilir. Ġlk kez 1950 yılında
tanımlanmıĢtır. 1 Efemeris saniyesi 0 Ocak 1900 tarihi, ET=12h için tropik yıl süresinin
(1/31556925.9747) katı olarak tanımlanır.
ET‟nin yüzyıllık bir değiĢimi olduğu tespit edilememiĢtir. Bu özelliği ile UT ye bir üstünlük
sağlar ET 1900 yılında UT ye eĢit olacak Ģekilde ayarlanmıĢtır. ET ve UT arasında,
ET = UT + T
EĢitliği vardır. T„nin bir yıl içindeki değiĢmeleri almanaklarda verilir.
4.2.2 Dinamik Zaman Sistemleri
Yerin kendi etrafındaki dönüĢ hızının uniform(değiĢmez) olmaması nedeniyle UT (Universal
Time), uzaydaki gök cisimlerinin konumlarının belirlenmesine uygun bir zaman birimi
değildir. Bunun yerine gökyüzündeki (GüneĢ Sistemi) cisimlerin zamana bağımlı
hareketlerinin gözlenmesiyle elde edilen Dinamik Zaman Sistemleri kullanılır.
Dinamik Zaman Sistemi, yerin güneĢ sistemi içindeki hareketi ile iliĢkili olup yerin güneĢ
etrafındaki dönmesiyle genel relativite kuramına göre tanımlanmaktadır. BaĢka bir deyiĢle
Dinamik Zaman, herhangi bir cismin belirli bir yerçekimi teorisine göre kurulan hareket
denklemlerindeki bağımsız değiĢkendir. Barisentrik Dinamik Zaman (BDT) ve Yersel
Dinamik Zaman olmak üzere iki dinamik zaman tanımlanabilir. Buna göre;
BDT : Barisentrik Dinamik Zaman(Barrycentric Dynamic time); genel Newton kuvvet
yasaları çerçevesinde inersiyal bir zaman sistemidir ve yerin yörünge hareket
denklemlerindeki zaman değiĢkenini sağlar.
TDT : Yersel Dinamik Zaman(Terrestrial Dynamic Time); Tam anlamıyla inersiyal olmayan
bir sistemde tanımlanmıĢtır. Yer etrafında dönen uyduların yörüngesel hareketlerinin
tanımında kullanılan diferansiyel eĢitliklerin integrasyonunda kullanılır. TDT, yer gravite
alanı içerisindeki hareket için düzenli bir zaman ölçeği oluĢturmaktadır ve GPS uydu
yörüngelerinin hesaplamalarında kullanılır.
4.2.3 Atomik Zaman Sistemi
Astronomik olmayan bir zaman sistemi olan, Atom Zaman Sistemi (Temps Atomique
International-TAI) dünyadaki atom saatleriyle belirlenen zaman sistemidir. 1955 yılında
sezyum atomunun frekans standartına dayalı çok yüksek doğruluklu bir zaman biriminin
oluĢturulması ve 1967 yılında da Uluslararası Birimler Sistemi‟nin atomik saniyeyi temel
zaman birimi kabul etmesi ile tanımlanmıĢtır. Buna göre atomik saniye; özel koĢullarda
sezyum 133 atomunun iki ince enerji seviyesi arasındaki geçiĢe karĢılık gelen 9192631770
kez titreĢimi için geçen süre olarak ifade edilmektedir.
Atom zamanı 1984‟de resmi olarak kanul edilmiĢ olup, Uluslar arası Atomik Zaman
(International Atomic Time – TAI) olarak isimlendirilmektedir. TAI dünya geneline
yayılmıĢ yaklaĢık 300 atomik saatin ağırlıklı ortalamasının Paris‟te bulunan bir merkez
tarafından iĢletilmesi ve yayınlanması esasına dayanır.
TAI sisteminin hesaplanmasından BIPM (The Bureau International des Poids et mesures) ve
IERS sorumlu kurumlardır. TAI, sürekli bir zaman ölçeği olup, TDT‟nin uygulamaya
yönelik Ģekli olarak da düĢünülebilir. TAI , TDT‟ye göre sabit olarak 32.184 saniye geri
olup iki zaman sistemi arasındaki iliĢki;
TAI=TDT - 32.184s
olarak belirlidir.
TAI sürekli bir zaman sistemi ölçeği olduğundan uygulamada bazı sorunlar çıkmaktadır.
Bunlardan en önemlisi Yer‟in GüneĢ‟e göre dönüĢ hareketi ortalama olarak yılda 1 saniye
yavaĢlamaktadır. Bu ise TAI ile güneĢ zamanı arasında senkronizasyon sorununa yol
açmaktadır. Bu sorunu gidermek için UTC (Coordinated Universal Time) tanımı yapılmıĢtır.
UTC, TAI ile aynı hıza sahip olup, yılda bir kere olmak üzere Aralık ya da Haziran ayında
(UT1-UTC) değerlendirmelerine bağlı olarak UTC‟ye 1 saniyelik düzeltme uygulanmakta ya
da uygulanmamaktadır. Bu 1 saniyelik düzeltmelere “leap second” (artık saniye) denir. Söz
konusu 1 saniyelerin ne zaman eklenip ne zaman çıkarılacağına IERS (International Earth
Rotation Service) karar vermektedir. Bu düzeltmenin yapılması ile UTC ile güneĢ zamanı
arasındaki senkronizasyon sorunu ortadan kalkmıĢ olmaktadır.
Bununla birlikte ABD Deniz Gözlemevi USNO (US Naval Observatory) kendi özel UTC
sistemini oluĢturmuĢ ve bu sisteme UTC(USNO) adı verilmiĢtir. UTC ile UTC(USNO)
arasındaki fark 1 milisaniye mertebesindedir.
GPS zamanı (GPST) , 06 Ocak 1980 saat 0.0 için UTC(USNO) ile aynı kabul edilmiĢtir.
Ancak GPS zamanı sürekli bir zaman sistemi olup, bu zamana 1 saniye düzeltmesi (leap
second) getirilmemektedir. Dolayısıyla 2000 yılı için GPS zamanı ile UTC (USNO) arasında
13 saniyelik bir fark oluĢmuĢtur. Sonuç olarak :
UTC(USNO) = GPST ± (06 Ocak 1980 saat 0.0 ‘dan sonraki artık saniyeler toplamı)
Ayrıca, TAI = GPST + 19.00s olarak belirlidir.
Uygulamada GPS zamanı, GPS haftaları ve GPS saniyeleri ile ifade edilirler. GPS haftası, 06
Ocak 1980 saat 0.0‟dan baĢlanarak sayılmaktadır ve 0 ile 1023 arasında değer alarak her
1023 ncü haftadan sonra sıfırlanmaktadır.
5. Jülyen Gün (JD) Sayısı Hesabı
Jülyen Günü (JD : Julian Date), 01 Ocak 4713 (M.Ö.) 12:00 UT epokundan itibaren geçen
ortalama güneĢ günü sayısı olup bir asırda 36525 gün olarak ifade edilir;
DüzenlenmiĢ referans zamanı, J2000.0 = 2000 Ocak 1.5 = 01 Ocak 2000 Saat 12:00 ve bu
referans zamanı için JD = 2451545.0 olarak belirlidir.
JD = Tamsayı(365.25xYıl)+Tamsayı(30.6004x(Ay+1))+Gün+(UT Saati)/24+1720981.5
eĢitliği ile bulunur. Burada;
Ay ≤ 2 ise Yıl=Yıl-1
ve
Ay=Ay+12 alınmalıdır.
DüzenlenmiĢ Jülyen Günü (MJD: Modified Julian Date) ise JD‟nin tersine gece yarısından
baĢlar ve MJD = JD – 2400000.5 ile hesaplanır.
Kullanılmakta olan GPS standart epokları :
GPS Standart Epoku :
Sivil Tarih : 06 Ocak 1980 UT=0.0
JD=2444244.5
Günümüzdeki GPS Standart Epoku :
Sivil Tarih : 01 Ocak 2000 UT=12.0 JD=2451545.0
Daha önce de ifade edildiği gibi GPS zamanı olarak GPS saniyesi ve GPS haftası
kullanılmaktadır ve GPS HAFTASI = Tamsayı((JD-2444244.5)/7) Ġle hesaplanmaktadır.
7. GPS uygulamalarında kullanılan zaman sistemleri
Uydu jeodezisi ile ilgili olarak üç ayrı zaman sistemi kullanılır. Yer kürede yapılan
gözlemler ile uydu hareketlerinin tarif edildiği sistem arasında bir iliĢki kurulabilmesi için,
gözlemin yapıldığı anda dünyanın uzaydaki konumunun bilinmesi gerekir. Bu amaçla, Yıldız
Zamanı ve Dünya Zamanı‟ndan yararlanılır.
Uydu hareketlerini açıklayabilmek için,bağımsız çok düzgün hareketli bir zaman sistemine
ihtiyaç vardır. Böyle bir zaman sistemi olarak dünyanın uzaydaki yörüngesinde yaptığı
hareketten üretilen Dinamik Zaman kullanılır.
Uydulara yapılan ölçülerde prezisyonlu sonuçlar alabilmek için, uydudan gönderilen ve
alınan sinyallerin alıcıya ulaĢım süresinin çok hassas olarak belirlenmesi gerekir. Bu amaca
yönelik zaman sistemine de Atom Zamanı denir.
Periyodik süreç
Zaman sistemi
Zaman sistemi
Yıldız Zamanı
Evrensel Zaman , Universal Time (UT)
Sidereal Time
Greenwich Yıldız Zamanı , Sidereal Time (GAST, GMST)
Yerin GüneĢ
etrafında
dönmesi
Dinamik Zaman
Yersel Dinamik Zaman , Terrestrial Dynamic Time (TDT)
Dynamic Time
Barisentrik Dinamik Zaman , Barrycentric Dynamic Time
(BDT)
Atomik salınım
Atomik Saat
Uluslar arası Atomik Zaman , International Atomic Time
(TAI)
Yerin dönmesi
Atomic Time
DüzenlenmiĢ Evrensel Zaman , Coordinated Universal
Time (UTC)
GPS Zamanı , GPS Time (GPST)
5. YÖRÜNGESEL KOORDĠNAT SĠSTEMLERĠ (OR)
Yörüngesel koordinat sistemleri yer etrafında dönen yapay uydu koordinatlarını tanımlamak
için kullanılan koordinat sistemidir. Yapay uydular uzaya fırlatıldıktan sonra yeryuvarının
etrafında yerin çekim etkisi ve diğer baĢka kuvvetlerin etkisi sonucu yörüngesel bir hareketle
dönmeye baĢlarlar. Diğer kuvvetlere örnek verilecek olursa bunlar: güneĢin ayın çekim
etkileri ve güneĢin radyasyon parçacıklarının uyduya yaptığı etki olarak söylenebilir. Diğer
etkilerden sayılabilecek atmosferik sürtünme yüksek yörüngelerde hareket eden uydularda
ihmal edilebilir düzeyde kalmaktadır.
Uyduların yeryuvarı etrafındaki yörüngesel hareketleri, KEPLER kurallarına bağlı olarak
gerçekleĢir. Matematik olarak, uyduların hareket denklemleri zamana göre sayısal integral
yöntemleri çözülebilen diferansiyel denklemler ile çözülür. Ġntegrasyon, uydunun
konumunun ve hızının bilindiği baĢlangıç koĢulları ile baĢlar. Kestirilen uydu konumları
uydulara yapılan gözlemler ile karĢılaĢtırılır. Elde edilen farklar kuvvet fonksiyonunu,
baĢlangıç koĢullarını ve gözlemcinin istasyon koordinatlarını geliĢtirmek için kullanılır.
Uydu koordinatları önce yörünge düzleminde hesaplanır. Hesaplanan bu koordinatlar önce
görünen yer (AP) sistemine ve daha sonra ortalama koordinat (CT) sistemine dönüĢür.
5.1 KEPLER Kuralları
1.Kepler Kuralı: Uydunun hareket ettiği yörünge, odaklarından birinde yeryuvarının ağırlık
merkezi bulunan bir düzlem elips biçimindedir.
Yörüngenin ,yeryuvarının ağırlık merkezine (Odak noktasına) en yakın noktasına PERĠGE,
en uzak noktasına APOGE denir.
2.Kepler Kuralı: Uydunun yörüngedeki hızı, uydu ile odak noktası arasındaki yarıçap
vektörü eĢit zamanda eĢit alan süpürecek Ģekilde değiĢir. Buna göre, uydu Perige yakınında
daha hızlı, Perigeden uzaklaĢtıkça daha yavaĢ hareket eder. Bu kural zamana bağlı hareket
denklemlerini tanımlar.
3. Kepler Kuralı : Uydunun yörüngesinin büyük yarı ekseninin küpünün dönüĢ
periyodunun karesine oranı sabittir.
a3
k2
M m
T 2 4 2
4 2 a3
kM
T2
T: DönüĢ Periyodu
a: Büyük yarı eksen
M: Yerin kütlesi
m: Uydunun kütlesi
5.2. Uyduların Yörünge Düzlemi Koordinatları
Uydunun yörüngedeki konumu Kutupsal ve Dik Koordinat olmak üzere iki farklı sistemle tanımlanabilir.
O : Odak (Yerin ağırlık merkezi)
S : Uydu
r : Uydunun yerin ağırlık merkezine uzaklığı
a,b : Yörünge elipsinin büyük ve küçük yarı eksenleri
V : Gerçek anomali açısı
5.2.1 Yörünge Kutupsal Koordinat Sistemi ( r,V )
Orijin yerin ağırlık merkezi (odak) noktası, koordinatlardan birisi yerin ağırlık merkezinden
uyduya olan r uzaklığı (zamanın fonksiyonu), diğer koordinat; yerin merkezini uyduya
birleĢtiren doğrultu ile yerin merkezini perige noktasına birleĢtiren doğrultu arasındaki V
gerçek anomali açısıdır. Bir uydunun konumu bu sistemde S(rs ,Vs) Ģeklinde gösterilir.
5.2.2 Yörünge Dik Koordinat Sistemi (x,y,z)
Merkezi yerin ağırlık merkezi, z ekseni yörünge düzlemine dik, x,y: Yörünge düzleminde
olup , x ekseninin + yönü perige noktasına yönelmiĢtir. y ekseni yörünge düzleminde x
ekseni ile 90o açı yapacak Ģekildedir. Bir uydunun konumu bu sistemde S(xs ,ys) Ģeklinde
gösterilir.
S uydusu için;
x= r.cosV , y= r.sinV , z= 0 , tanV= y/x , V= tan-1(y/x) , r= (x2+y2)1/2
5.3 Uyduların Konum Koordinatları
Uyduların uzaydaki konumunu belirlemek için genellikle altı yörünge elemanı kullanılır.
Bunlara Kepler Elemanları adı verilir. Bunlar;
Ω
Yükselme noktasının ( right ascension of ascending node ) rektesenziyonu
i
Ekvator düzlemi ile yörünge düzlemi arasındaki açı (inclination)
ω
Perigenin argümanı
Uydunun (S) konumunu yörünge elipsinde hesaplamaya yarayan parametreler.
a
Yörünge elipsinin büyük yarı ekseni
e
Yörünge elipsinin dıĢ merkezliği
f
Gerçek anomali
WE
Yerin açısal dönme hızı (=7.292115167e-5 rad/s, WGS84 değeri)
GAST
Greenwich Görünen Yıldız Zamanı
Perigee
Enberi
Apogee
Enöte
5.3.1 Yörünge Elipsi
Ġki boyutlu yörünge elipsinde uydu koordinatlarını hesaplayabilmek için x-ekseni Perigee
doğrultusunda, z-ekseni yerin ağırlık merkezinde yörünge düzlemine dik, y-ekseni sol el
sistemini sağlayacak Ģekilde seçilir.
t0
fk
Ek
Mk
M0
rk
Xk , Yk , Zk = 0
GM
n
Yörünge referans anı
tk anındaki gerçek anomali (rad)
tk anındaki gerçek anomali (rad)
tk anındaki ortalama anomali (rad)
t0 anındaki ortalama anomali (rad),(tp Perigee geçiĢ anı ise M0=0 olur)
tk anındaki yarıçap (m)
tk anındaki yörüngesel koordinatlar
Yerin evrensel gravitasyon parametresi(=3.986005e14 m3/s2,WGS84)
HesaplanmıĢ ortalama hareket (rad/s)
Ek ile Mk arasındaki iliĢki Kepler denklemi ile verilir.
Burada bilinmeyen Ek olduğundan denklem yeniden düzenlenir ve iteratif olarak çözülür.
Ek bulunduktan sonra yörünge düzlemindeki koordinatlar hesaplanır.
5.3.2 Yörüngesel Koordinat sisteminden (OR) Görünen Yer Sistemine(AP) DönüĢüm
Yörünge düzlemindeki koordinatlar AP sistemine diğer kepler elemanları yardımı ile
dönüĢtürülür. AP ve CT sistemleri arasındaki dönüĢüm tk anındaki GAST ile gerçekleĢtirilir.
Ya da doğrudan OR ve CT arasındaki dönüĢüm aĢağıdaki Ģekilde gerçekleĢtirilir.
Genellikle yapay uyduların yörünge elemanları belirli bir ana (epoğa) göre verilir. Uydunun
diğer anları için konum bilgileri bu referans anına göre hesaplanır. Yukarıdaki bağıntılarda
değiĢen tek Ģey son dönüĢüm matrisidir.
6. YERSEL KOORDĠNAT SĠSTEMLERĠ
Yersel koordinat sistemleri, yer yuvarına yapıĢıktır. Yer yuvarı ile birlikte dönerler ve
dolanırlar. Yeryüzü üzerindeki noktaların konumlarının ve hareketlerinin belirlenmesi için
kullanılırlar. Doğal ve Referans koordinat sistemleri olarak tanımlanabilirler. Jeosentrik ve
Toposentrik sistemler olarak sınıflandırılırlar.
Bu sistemleri açıklayabilmemiz için bazı temel tanımları gözden geçirmekte fayda vardır.
a) ASTRONOMĠK KOORDĠNATLAR
Astronomik Enlem (Ф) : Astronomik meridyen düzleminde, ekvator düzlemi ile noktadan
geçen çekül doğrultusu arasındaki açı.
Astronomik Boylam (Λ) : Ekvator düzleminde Greenwich astronomik meridyeni ile
noktanın astronomik meridyeni arasındaki açı.
Ortometrik Yükseklik (H) : Çekül doğrusu boyunca jeoid ile nokta arasındaki uzaklık.
b) JEODEZĠK KOORDĠNATLAR
Jeodezi Enlem (ϕ): Noktanın jeodezik meridyen düzleminde, elipsoid normalinin ekvator
düzlemi ile yaptığı açı.
Jeodezik Boylam (λ) : Ekvator düzleminde baĢlangıç meridyeni ile noktanın jeodezik
meridyeni arasındaki açı.
Elipsoidal Yükseklik (h) : Nokta ile noktanın elipsoid yüzeyine izdüĢüm yeri arasındaki
uzaklık.
Jeosentrik Enlem (ϕ’) : Noktadan yerin merkezine birleĢtirilen doğru ile ekvator düzlemi
arasındaki açı.
6.1. Doğal Koordinat Sistemleri
6.1.1 Yermerkezli (Jeosentrik) Yersel Sistem (CT: Convetional Terrestrial)
BaĢlangıç Noktası: Yerin ağırlık merkezine yakın (C)
Birinci Kutup
: Yerin dönme ekseni doğrultusu (//CIO)
Birinci Düzlem : Ekvator düzlemi.
Ġkinci Düzlem
: Greenwich meridyen düzlemi.
Ġkinci Kutup
: Greenwich ve Ekvator düzlemlerinin arakesiti.
Birinci Eksen
: Greenwich ve Ekvator düzlemlerinin arakesit doğrultusu (XCT)
Üçüncü Eksen : Yerin dönme ekseni doğrultusu (ZCT) (//CIO)
Ġkinci Eksen
: Sistem sağ (el) sistem oluĢturulacak biçimde seçilir (YCT)
6.1.2. Ġstasyon Merkezli (Toposentrik) Yersel Sistem (LA: Local Astronomic)
BaĢlangıç Noktası: Yerin yüzeyindeki bir nokta (Pi )
Birinci Kutup
: Pi noktasındaki çekül doğrultusu (g)
Birinci Düzlem : BaĢlangıç noktasında yer yüzüne teğet olan düzlem.
Ġkinci Düzlem
: Pi noktasının meridyen düzlemi; Pi noktasının çekül doğrultusu ve yerin
dönme eksenini içinde bulunduran düzlem.
Ġkinci Kutup
: Teğet ve Meridyen düzlemlerinin arakesiti arakesiti.
Birinci Eksen
: Teğet ve Meridyen düzlemlerinin arakesiti arakesit doğrultusu. (n)
Üçüncü Eksen : Çekül doğrultusu (g=u)
Ġkinci Eksen
: Sistem sol (el) sistem oluĢturulacak biçimde seçilir ( e)
6.1.3. Yeryüzümerkezli Kutupsal Koordinatlardan, Yeryüzümerkezli Dik
Koordinatlara DönüĢüm
6.1.4. Yeryüzümerkezli Dik Koordinatlardan, Yermerkezli Dik Koordinatlara
DönüĢüm
C* matrisi aĢağıdaki iki yoldan biri ile elde edilebilir. Her iki yolda da farklı dönüklük
matrisleri kullanılmasına rağmen aynı sonuca ulaĢılır.
Ya da;
Yararlanarak sonuca ulaĢılır.
Yeryüzümerkezli (Yerel) astronomik koordinat sisteminin (LA) birim vektörlerinin ortalama
(CT) sistemindeki doğrultuları aĢağıdaki Ģekilde bulunur.
6.2. Referans Koordinat Sistemleri
6.2.1 Yermerkezli Jeodezik Koordinat Sistemi (G: Geodetic)
BaĢlangıç Noktası: Referans elipsoidinin ağırlık merkezine yakın (G)
Birinci Kutup
: Dönel elipsoidin küçük yarı ekseninin doğrultusu (//CIO)
Birinci Düzlem : Elipsoidin ağırlık merkezini içinde bulunduran Ekvator dairesi.
Ġkinci Düzlem
: Greenwich meridyen elipsi.
Ġkinci Kutup
: Greenwich meridyen elipsi ve Ekvator düzlemlerinin arakesiti.
Birinci Eksen
: Greenwich meridyen elipsi ve Ekvator düzlemlerinin arakesit
doğrultusu (XG )
Üçüncü Eksen : Dönel elipsoidin küçük yarı ekseninin doğrultusu (ZG) (//CIO)
Ġkinci Eksen
: Sistem sağ (el) sistem oluĢturulacak biçimde seçilir (YG)
6.2.2. Ġstasyon Merkezli (Toposentrik) Yersel Sistem (LG: Local Geodetic)
BaĢlangıç Noktası: Yerin yüzeyindeki bir nokta (Pi )
Birinci Kutup
: Pi noktasındaki elipsoid normalinin doğrultusu (u)
Birinci Düzlem : Pi noktasında elipsoid normaline dik düzlem.
Ġkinci Düzlem
: Pi meridyen elipsi düzlemi.
Ġkinci Kutup
: Pi noktasında elipsoid normaline dik düzlem ile meridyen elipsi
düzlemlerinin arakesiti.
Birinci Eksen
: Pi noktasında elipsoid normaline dik düzlem ile meridyen elipsi
düzlemlerinin arakesit doğrultusu (n)
Üçüncü Eksen : Pi noktasındaki elipsoid normalinin doğrultusu (u)
Ġkinci Eksen
: Sistem sol (el) sistem oluĢturulacak biçimde seçilir(e)
6.2.3 Ġstasyon Merkezli Kutupsal Koordinatlardan, Ġstasyon Merkezli Dik
Koordinatlara DönüĢüm
6.2.4 Ġstasyon Merkezli Koordinatlardan, Yer Merkezli Merkezli Dik Koordinatlara
DönüĢüm
Yerel jeodezik koordinat sisteminin (LG) birim vektörlerinin ortalama (CT) sistemindeki
doğrultuları aĢağıdaki Ģekilde bulunur.
6.3. Doğal ve Referans (Yapay) Koordinat Sistemleri Arasındaki ĠliĢki
6.4. 3B Doğal ile 3B Referans (Yapay) Koordinatlar Arasındaki DönüĢüm