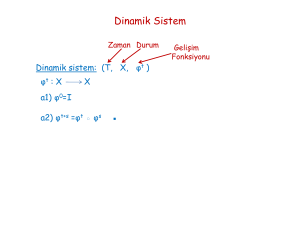
Bazı Doğrusal Olmayan Sistemler
Sarkaç
Θ
ml mg sin kl
l
yerçekimi
sürtünme
Durum uzayı gösterimi
mg
x1 ˆ , x2 ˆ
durum değişkenleri
x1 x2
g
k
x2 sin x1 x2
l
m
Bu denge noktalarının hepsi anlamlı mı?
Önce ne yapacağız ?
0 x2*
0
g
k
sin x1* x2*
l
m
denge noktaları
-2π -π
Denge noktalarının civarındaki davranışı incelemek istesek
ne yapmamız gerekir?
(0,0) civarında
x1 0
x g
2 l
1 x
k 1
x2
m
Bu sistemin kararlılığını incelemeyi biliyoruz
................................................................................
π
2π
(π,0) civarında
x1 0
x g
2 l
1 x
k 1
x2
m
Bu sistemin de kararlılığını incelemeyi biliyoruz
......................................................................................
(0,0)’ın civarı
Sürtünmenin etkisini ihmal etsek....
x1 0
x g
2 l
1 x
1
0 x2
Bu sistemin kararlılığına baksak.......................................
H.K.Khalil, “Nonlinear Systems”, 3rd Edition, Pearson Education, 2000.
(π,0) civarı
http://www.jirka.org/diffyqs/htmlver/diffyqsse47.html
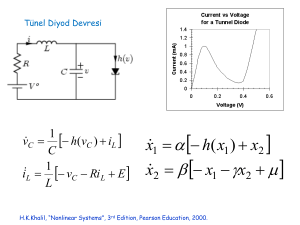
Tünel Diyod Devresi
1
vC h(vC ) iL
C
iL 1 vC Ri L E
L
x1 h( x1 ) x2
x2 x1 x2
H.K.Khalil, “Nonlinear Systems”, 3rd Edition, Pearson Education, 2000.
Denge noktaları ....
**
*
*
*
*
*
0 x
0
*
h( x1 )
*
1
h( x1* )
*
x2
*
x2
1
x1*
1
Okuma önerisi: H.K.Khalil, “Nonlinear Systems”, 3rd Edition, Prentice Hall, 2002
sf. 1-49.
L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits”
Mc.Graw Hill, 1987, New York sf. 363-439.
H.K.Khalil, “Nonlinear Systems”, 3rd Edition, Pearson Education, 2000.
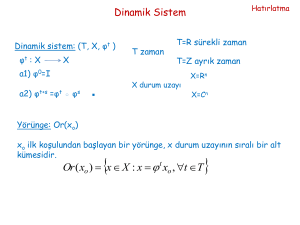
Yörünge: Or(xo)
xo ilk koşulundan başlayan bir yörünge, x durum uzayının sıralı bir alt
kümesidir.
Or ( xo ) x X : x t xo , t T
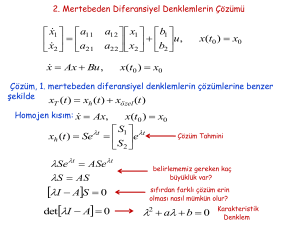
Lineer otonom sistem
x1 0 5 x1
x 1 2 x
2
2
x1 2 5 x1
x 1 4 x
2
2
Lojistik dönüşüm
x(k 1) 3.46 x(k )(1 x(k ))
1
0.9
0.8
0.7
0.6
0.5
0.4
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Denge noktası- Sabit nokta:
t x* x* , t T x* X
denge noktası-sabit nokta
Denge noktası-Sabit nokta nasıl belirlenir?
Sürekli Zaman
Çevrim:
x f ( x)
x f ( x)
0 f ( x* )
x* f ( x* )
xo Lo , t To xo t xo , To 0, t T L0
Sürekli Zaman
Y.A. Kuznetsov, “Elements of Applied Bifurcation Theory”3rd Edition, Springer, 2004,
Ayrık Zaman
periyodik yörüngesi
Çevrimdir.
Ayrık Zaman
Limit Çevrim:
Sürekli zaman, dinamik bir sisteme ait bir çevrimin komşuluğunda başka
bir çevrim yoksa bu çevrim Limit Çevrimdir.
Hangisi çevrim,
hangisi limit çevrim?
Faz Portresi:
Dinamik bir sistemin durum uzayının yörüngeler ile bölümlenmesi
faz portresini verir. t x1
t x2
Bu yörüngeleri birbirinden
farklı kılan nedir?
Faz portresine bakarak
neleri anlayabiliriz?
t x3
Değişmez Küme (S) :
T , X , , S X
t
xo S t xo S , t T
Değişmez küme sistemin asimptotik durumları
hakkında bilgi veriyor.
Dinamik sistemin yörüngelerini içeriyor ve
her yörünge bir değişmez küme.
Durum uzayı bir metrik uzay ise kapalı değişmez kümeleri tanımlayabiliriz.
En basit kapalı değişmez alt küme Denge noktası, limit çevrim
Manifold
Tuhaf çekici
Değişmez kümeleri gözlemeleyebilmemiz için
kolayca bulabilmemiz gerek, bu ne zaman olası?
Civarlarındaki yörüngeler de zaman ilerledikçe değişmez kümeye yaklaşırsa
Kararlı değişmez küme: T , X , t
Lyapunov anlamında kararlılık
X
tam metrik uzay
S 0 kapalı değişmez küme
Bu tanımı değişmez küme
tanımından farklı kılan ne?
S0 U ‘nun yeterince küçük herhangi bir U komşuluğunda
S0 V bir V komşuluğu var öyle ki t x U , x V , t 0
S0 U 0 ‘nun bir U 0 komşuluğu vardır öyle ki t t x S0 , x U 0
Değişmez Küme (S) :
Asimptotik kararlılık
T , X , ,
t
SX
xo S t xo S , t T
Lyapunov anlamında kararlılık
Y.A. Kuznetsov, “Elements of Applied Bifurcation Theory”3rd Edition, Springer, 2004,
Lyapunov anlamında kararlılık nasıl tanımlanmıştı, hatırlayalım
Tanım: Lyapunov anlamında kararlılık
x (t ) f ( x(t )) sistemine ilişkin bir denge noktası xd
herhangi bir 0 için
x(t0 ) xd ( )
eşitsizliği
olsun. Verilen
x(t ) xd , t t0, t R
eşitsizliğini gerektirecek şekilde bir ( ) bulunabiliyorsa xd denge
noktası Lyapunov anlamında kararlıdır.
Denge noktası xd kararlı olsun.
lim x(t ) xd 0
t
ise
xd
denge noktası asimptotik kararlıdır.