Diferansiyel Denklem Modeli, Transfer Fonksiyonu Modeli ve Durum Uzayı Modelleri:
1. Matematiksel Modelleme:
Bir fiziksel sistemin dinamik davranışını temsil eden matematiksel denklemlere matematiksel
model denir. Kontrol edilmek istenen dinamik sistemin matematiksel modellenmesi, sistemin analiz
ve denetleyici tasarımında önemli bir adımı oluşturur. Kontrol edilen bir sistem verildiğinde,
öncelikle sistemin dinamik özelliklerini belirleyen bir değişken takımını tanımlamak gerekir.
Örneğin, kontrol etmek istediğimiz bir elektrik motorunu ele alalım. Burada sargılara uygulanan
gerilim, sargılardan akan akım, motorun milinde oluşan moment, rotorun açısal hızı veya konumu
sistem değişkeni olarak seçilebilir. Bu değişkenler, motorun dinamiğini ifade eden matematiksel
denklemleri tanımlayan fiziksel kurallar üzerinden birbirleriyle ilişkilidir. Burada motorun çalışma
koşullarına ve modellerin ayrıntısına bağlı olarak türetilen sistem denklemleri doğrusal, doğrusal
olmayan, zamanla değişen ya da zamanla değişmeyen olabilir.
2. Doğrusal Sistemlerin Matematiksel Modellenmesi:
Matematiksel model denklemleri doğrusal olan sistemlere doğrusal sistemler denir. Doğrusal
sistemlerin en önemli özelliği katlama (süperpozisyon) ilkesinin uygulanabilmesidir. Katlama
ilkesi, birden fazla giriş fonksiyonunun aynı anda uygulanması durumunda sistemin verdiği cevap
fonksiyonunun, bu giriş fonksiyonlarının ayrı ayrı uygulanması durumunda ortaya çıkan cevap
fonksiyonlarının toplamına eşit olduğunu ifade eder. Bir dinamik sistemin deneysel olarak
incelemesinde elde edilen giriş çıkış ilişkileri oransal ise, incelenen sistemin doğrusal olduğu kabul
edilebilir.
Mühendislik sistemleri gerçekte doğrusal olmayan bir karakteristiğe sahiptir. Doğrusal olarak
ele alınan sistemler aslında tam olarak doğrusal olmayan, fakat belli bir çalışma bölgesi için
doğrusal kabul edilen sistemlerdir. Doğrusal olmayan sistemlerin matematiksel denklemlerini ve
bunların çözümlerini elde etmek zordur ve bazen analitik çözümler elde edilemeyebilir. Doğrusal
olmayan sistemlerin doğrusal olarak ele alınması sadece bir yaklaşıklıktır. Yapılan bu yaklaşıklığın
gerçek duruma uyması oranında elde edilen model mükemmele yakın olur. Ayrıca, Laplace
dönüşümün sadece doğrusal sistem modellerine uygulanabilir. Bu durumda, Laplace dönüşümünün
uygulanabilmesi için doğrusal olmayan sistem modellerinin çeşitli yöntemlerle doğrusallaştırılması
gerekir.
2.1 Diferansiyel Denklem Modeli:
Mühendislikte kullanılan birçok dinamik sistemin matematiksel modeli diferansiyel
denklemler kullanılarak ifade edilebilir. Dinamik sistemlerin uygulanan bir giriş fonksiyonuna
vereceği cevap ise bu diferansiyel denklemin çözümünden elde edilir. Fiziksel sistemlerin dinamik
davranışını modellemek için kullanılan bu diferansiyel denklem modelleri ele alınan sistem ile ilgili
fiziksel yasalardan yararlanılarak elde edilir. Örneğin, elektriksel sistemler için Kirchhoff yasaları,
mekanik sistemler için Newton yasaları, elektromekanik sistemler için bu yasaların ikisi de
kullanılabilir.
Doğrusal, zamanla değişmeyen sürekli-zaman bir sistemin giriş-çıkış ilişkisi genellikle
aşağıdaki gibi sabit katsayılı n’inci mertebeden bir diferansiyel denklemle verilebilir.
d n y (t )
d n 1 y (t )
dy (t )
d mu (t )
d m 1u (t )
du (t )
a1
... an 1
an y (t ) b0
b1
... bm 1
bmu (t )
n
n 1
m
m 1
dt
dt
dt
dt
dt
dt
Buradaki a0 , a1 ,..., a n1, ve b0 , b1 ,..., bm katsayıları sabit katsayılardır. Bir kez tt0 için u(t), t=t0
için y (t ) ve türevlerinin başlangıç koşulları belirlenmiş ise tt0 için y (t ) yanıtı üstteki denklem
1
çözülerek elde edilebilir. Ancak, doğrusal sistemlerin analizi ve tasarımı yönünden, sadece
diferansiyel denklemleri kullanma yöntemi çok elverişsizdir. Bu nedenle, yukarıdaki gibi verilen
diferansiyel denklemler, kontrol sistemlerinin analiz ve tasarımında özgün haliyle çok ender
kullanılırlar.
Doğrusal kontrol teorisinin temel felsefesi sistemin diferansiyel denklemlerinin tam çözümünü
gerektirmeyen analiz ve tasarım yöntemlerini geliştirmektir. Geleneksel kontrol teorisinde, doğrusal
sistemleri modellemenin geleneksel yöntemi, değişkenler arasındaki giriş-çıkış ilişkisini ifade
etmek için transfer fonksiyonlarını kullanmaktır. Transfer fonksiyonlarını tanımlamanın bir yolu
darbe (impulse) cevabı kavramından yararlanmaktır.
2.2 Darbe (Impulse) Cevabı:
Doğrusal, zamanla değişmeyen bir sistemde girişin u (t ) ve çıkışın y (t ) olduğunu varsayalım.
Bu durumda sistem, girişine birim darbe (impulse) fonksiyonu (t ) uygulandığında, çıkışında elde
edilen darbe cevabı g (t ) ile ifade edilebilir. Doğrusal sistemlerin darbe cevabı bilindiğinde,
herhangi bir u (t ) girişine verdiği y (t ) cevabı, sistemin transfer fonksiyonu kullanılarak elde
edilebilir.
2.3 Transfer Fonksiyonu Modeli:
Doğrusal zamanla değişmeyen bir sistemin transfer fonksiyonu, başlangıç koşullarının sıfır
olması halinde, sistemin darbe (impulse) cevabının Laplace dönüşümü olarak tanımlanır.
U (s)
u (t )
G (s)
g (t )
Y (s )
y (t )
Tek girişli ve tek çıkışlı sistemlerde u (t ) giriş işareti, y (t ) çıkış işareti ve g (t ) darbe cevabı olmak
üzere, sistemin transfer fonksiyonu G ( s) L{g (t )} olarak tanımlanır. G (s) transfer fonksiyonu,
u (t ) giriş işaretinin Laplace dönüşümü U (s) , y (t ) çıkış işaretinin Laplace dönüşümü Y (s) ve tüm
başlangıç koşulları sıfır olmak üzere
Y (s )
G( s)
U ( s)
olarak tanımlanır.
Doğrusal bir sistemin transfer fonksiyonu darbe cevabı cinsinden tanımlansa da, uygulamada
transfer fonksiyonunun sistemin diferansiyel denkleminden elde edilmesi daha kolaydır.
Bilindiği gibi, doğrusal zamanla değişmeyen sürekli-zaman bir sistemin giriş-çıkış ilişkisi
genellikle bir diferansiyel denklem ile ifade edilebilir ve transfer fonksiyonunun doğrudan
diferansiyel denklemlerden elde edilmesi daha kolaydır. Doğrusal zamanla, değişmeyen bir
sistemde giriş çıkış ilişkisi, aşağıdaki sabit katsayılı n’inci mertebeden bir diferansiyel denklemle
verilsin.
d n y (t )
d n 1 y (t )
dy (t )
d mu (t )
d m 1u (t )
du (t )
a
...
a
a
y
(
t
)
b
b
... bm 1
bmu (t )
1
n 1
n
0
1
n
n 1
m
m 1
dt
dt
dt
dt
dt
dt
Yukarıda diferansiyel denklem ile verilen doğrusal bir sistemin transfer fonksiyonunu elde
etmek için, başlangıç koşulları sıfır kabul edilerek, denklemin her iki tarafına Laplace dönüşümü
uygulanır. Bu durumda
2
( s n a1s n 1 ... an 1s an )Y (s ) (b0 s m b1s m 1 ... bm 1s bm )U (s )
yazılabilir. Buradan u (t ) ve y (t ) arasındaki transfer fonksiyonu
Y ( s ) b0 s m b1s m 1 ... bm 1s bm
G( s)
n
U (s)
s a1s n 1 ... an 1s an
olarak elde edilir. Burada n , n m olmak üzere, sistemin derecesidir.
Transfer fonksiyonunun özellikleri aşağıdaki gibi özetlenebilir:
1. Transfer fonksiyonu sadece doğrusal, zamanla değişmeyen sistemler için tanımlanmıştır.
Doğrusal olmayan sistemler için tanımlanmamıştır.
2. Bir sistemin giriş çıkış değişkenleri arasındaki transfer fonksiyonu darbe cevabının Laplace
dönüşümü olarak tanımlanır. Transfer fonksiyonunun diğer bir tanımı, çıkış değişkeninin
Laplace dönüşümünün, giriş değişkeninin Laplace dönüşümüne oranı şeklindedir.
3. Sistemin tüm başlangıç koşulları sıfıra eşittir.
4. Transfer fonksiyonu sistem giriş fonksiyonundan bağımsızdır.
5. Sürekli sistemlerde transfer fonksiyonu sadece s karmaşık değişkeninin bir fonksiyonudur.
Gerçek bir değişkenin, zamanın ya da herhangi bağımsız bir değişkenin fonksiyonu değildir.
6. Transfer fonksiyonu sistemin çıkışını girişine oranlamak için gerekli birimleri içerir, fakat
sistemin fiziksel yapısı ile ilgili hiçbir bilgi içermez. Bu nedenle, farklı fiziksel yapılara sahip
olan farklı sistemler benzer transfer fonksiyonlarına sahip olabilir.
7. Transfer fonksiyonunda s karmaşık değişkeni yerine d / dt türev operatörü yazıldığında
sistemin diferansiyel denklemi elde edilebilir.
8. Doğrusal bir sistemin karakteristik denklemi, transfer fonksiyonu payda polinomu sıfıra
eşitlenerek elde edilen denklemdir. Üstteki transfer fonksiyonu ile verilen sistemin karakteristik
denklemi aşağıdaki gibi yazılabilir.
(s ) s n a1s n 1 ... an 1s an 0
(s ) ( s p1 )( s p2 )( s pn ) 0
Doğrusal, tek girişli tek çıkışlı bir sistemin kararlılığı karakteristik denklem kökleriyle tamamen
belirlenebilir. Karakteristik denklemin kökleri sistemin kutupları olarak adlandırılır. Transfer
fonksiyonunun kutupları gerçel veya karmaşık eşlenik olabilir. Sistemin kutuplarının tümü
negatif gerçel kısımlara sahip ise sistem kararlı olur. Sistemin kutuplarından bir tanesi dahi
pozitif gerçel kısma sahip ise sistem kararsız olur.
9. Paydanın kökleri transfer fonksiyonunun kutupları ve payın kökleri ise transfer fonksiyonunun
sıfırları olarak adlandırılır. Yukarıda tanımlanan transfer fonksiyonunun pay ve paydasını
çarpanlarına ayırırsak,
G( s)
Y (s ) b0 s m b1s m 1 ... bm 1s bm K ( s z1 )( s z2 )(s z m )
n
U ( s)
s a1s n 1 ... an 1s an
( s p1 )( s p2 )( s pn )
şeklinde yazabiliriz. Burada
zi , (i 1,2,, m) : transfer fonksiyonunun sıfırlarıdır
pi , (i 1,2, , n) : transfer fonksiyonunun kutuplarıdır
3
10. Transfer fonksiyonunu, kutupları ve sıfırları cinsinden gösterimi yerine zaman sabitleri
cinsinden yazıldığında, sistemin transfer fonksiyonunun payına sistemin kalıcı durum kazancı
K s çarpım olarak gelir.
G( s)
Y ( s) b0 s m b1s m 1 ... bm 1s bm K ( s z1 )( s z 2 )( s zm )
n
U ( s)
s a1s n 1 ... an 1s an
( s p1 )( s p2 )(s pn )
G( s)
K s (Tz1s 1)(Tz 2 s 1)(Tzm s 1)
(Tp1s 1)(Tp 2 s 1) (Tpn s 1)
Sistemin kalıcı durum kazancı K s , transfer fonksiyonunu zaman sabitleri cinsinden yeniden
düzenlemeden, Laplace dönüşümünün son değer teoremine göre aşağıdaki gibi hesaplanabilir.
y (t )
Lim sG( s )
K s Lim
t u (t )
t
2.4 Durum Uzayı Modelleri:
Buraya kadar olan konular içerisinde doğrusal sistemlerin dinamik davranışını tanımlamak
için diferansiyel denklem modeli ve transfer fonksiyonu modeli kullanılmıştır. Doğrusal sistemleri
modellemek için kullanılan diğer bir gösterim biçimi de durum uzayı modelleri veya durum
değişkeni modelleridir. Durum uzayı modeli, sistemin dinamik davranışını tanımlayan ve durum
denklemleri olarak adlandırılan birinci derece denklemlerden oluşan bir denklem takımıdır. Durum
denklemleri matris ve vektör gösterim biçimleri kullanılarak ifade edilir. Durum denklemleri
kullanılarak yapılan analiz ve tasarım yöntemlerinde matris hesaplama teknikleri kullanılır.
Durum değişkeni modeliyle, herhangi bir anda bir sistemin dinamik davranışı o sistemin
durum değişkenleri cinsinden tanımlanabilmektedir. Örneğin, n ’inci dereceden bir sistemin durum
değişkenleri modeli x1 (t ) , x2 (t ) , , xn (t ) olarak seçilen n tane durum değişkeni ve n tane birinci
derece diferansiyel durum denklemi içerir.
Genel olarak r -girişli m -çıkışlı bir sistemin durum denklemi ve çıkış denklemi sırasıyla
aşağıdaki gibi yazılabilir.
x Ax Bu
y Cx Du
Burada, x : durum vektörü ( n elemanlı sütun vektör)
u : kontrol vektörü ( r elemanlı sütun vektör)
y : çıkış vektörü ( m elemanlı sütun vektör)
A : sistem matrisi ( n n elemanlı matris)
B : giriş matrisi ( n r elemanlı matris)
C : çıkış matrisi ( m n elemanlı matris)
D : doğrudan iletim matrisi ( m r elemanlı matris)
olarak adlandırılır.
Durum denklemleri, çok girişli çok çıkışlı sistemlere kolaylıkla uygulanabilir ve mevcut
bilgisayar programlarıyla sayısal olarak çözülebilir. Durum değişkenleriyle yapılan kontrol tasarım
yöntemleri genellikle modern kontrol yöntemleri olarak bilinirken, transfer fonksiyonu ile yapılan
tasarım yöntemleri klasik yöntemler olarak bilinir. Tek girişli tek çıkışlı sistemlerin analizinde ve
4
kontrolünde daha çok transfer fonksiyonu modellerine dayalı klasik yöntemler tercih edilmektedir.
Çünkü matris denkleminden sistem dinamiğinin iç yapısını görmek mümkün değildir.
Transfer fonksiyonu modelinden durum değişkenleri modelini de elde etmek mümkündür.
Bunun için önce s karmaşık değişkeni yerine s d / dt yazılarak diferansiyel denklem modeline
geçilebilir ve daha sonra elde edilen diferansiyel denklem modelinden birinci derece diferansiyel
durum değişkenlerine geçilebilir.
Bir sistemin transfer fonksiyonu modeli tektir. Bir sistemin durum uzayı modeli ise çok
değişik formlarda yazılabilir. Durum değişkenlerinin farklı seçimleri durum denklemlerinin farklı
kanonik formlarda yazılabilmesini sağlar. Yani bir sistemin çok sayıda durum değişkeni modeli
elde edilebilir. Fakat transfer fonksiyonu gösterimi tektir. Bir sistemin durum değişkeni modeli
transfer fonksiyonu kullanılarak genel olarak aşağıdaki standart kanonik formlardan birine uygun
olacak şekilde yazılabilir.
1-) Kontrol edilebilir kanonik formda,
2-) Gözlenebilir kanonik formda,
3-) Köşegen (diyagonal) kanonik formda,
4-) Jordan kanonik formda yazılabilir.
3. Diferansiyel Denklem Modelinden Durum Denklemlerinin Elde Edilmesi:
3.1 Diferansiyel Denklem Modelinin Giriş Tarafının Türev Terimleri İçermemesi Durumu:
Aşağıdaki n ’inci derece diferansiyel denklem modelini ele alalım.
y ( n) (t ) a1 y ( n 1) (t ) ... an 1 y (t ) an y (t ) u (t )
Burada n tane durum değişkeni y (t ) , y (t ) , y(t ) , , y ( n1) (t ) olarak seçildiğinde, sistemin
diferansiyel denklemi ve durum değişkenleri kullanılarak aşağıdaki diferansiyel durum denklemleri
elde edilir.
x1 x 2
x 2 x 3
x1 y
x2 y
x3 y
xn
x n 1
x n a n x1 a n 1 x 2 a1 x n u
xn y ( n 1)
Sistemin diferansiyel durum denklemleri matris vektör formunda aşağıdaki gibi yazılabilir.
x Ax Bu
y Cx
Buradaki matris ve vektörler aşağıdaki gibidir.
x1
0
x
0
2
x , A
xn 1
0
xn
an
1
0
0
1
0
0
an 1 an 2
0
0
0
0
, B , C 1 0 0 0
1
0
1
a1
5
Bu sistemin transfer fonksiyonu sıfır başlangıç koşulları için diferansiyel denklemin her iki tarafının
Laplace dönüşümü alınarak aşağıdaki gibi yazılabilir.
G( s)
Y ( s)
1
n
n 1
U (s ) s a1s an 1s an
Örnek: Diferansiyel denklemi y 5 y y 2 y u olarak verilen sistemin durum denklemlerini
yazınız.
Çözüm: Sistemin transfer fonksiyonunu Laplace dönüşümü ile aşağıdaki gibi yazabiliriz.
G( s)
Y ( s)
1
1
3
3
2
2
U ( s) s 5s s 2 s a1s a2 s a3
a1 5 , a2 1 , a3 2
Durum değişkenleri aşağıdaki gibi seçildiğinde diğer katsayılar aşağıdaki gibi hesaplanır
x1 y
x2 y
x3 y
x1 x2
x2 x3
x3 a3 x1 a2 x2 a1 x3 u
ve sistemin durum değişkeni modeli aşağıdaki gibi elde edilir.
x1 0
x 0
2
x3 a3
1
0
a2
0 x1 0
1 x2 0 u
a1 x3 1
x1
y 1 0 0 x2
x3
1
0 x1 0
x1 0
x 0
0
1 x2 0 u
2
x3 2 1 5 x3 1
x1
y 1 0 0 x2
x3
3.2 Diferansiyel Denklem Modelinin Giriş Tarafının Türev Terimleri İçermesi Durumu:
Aşağıdaki n ’inci derece diferansiyel denklem modelini ele alalım.
y ( n) (t ) a1 y ( n 1) (t ) ... an 1 y (t ) an y (t ) b0u ( n ) (t ) b1u ( n 1) (t ) ... bn 1u (t ) bn u (t )
Burada durum değişkenleri aşağıdaki gibi seçildiğinde aşağıdaki durum değişkeni modeli elde
edilir.
x1 y 0u
x2 ( y 0u ) 1u x1 1u
x3 ( y 0u 1u ) 2u x2 2u
xn ( y ( n 1) 0u ( n 1) 1u ( n 2 ) n 2u ) n 1u xn 1 n 1u
Burada 0 , 1 , , n katsayıları aşağıdaki gibi hesaplanmaktadır.
6
0 b0
1 b1 a10
2 b2 a11 a2 0
3 b3 a1 2 a2 1 a3 0
n bn a1 n 1 an 11 an 0
Bu durumda sistemin diferansiyel denklemi ve durum değişkenleri kullanılarak aşağıdaki
diferansiyel durum denklemleri elde edilir.
x1 x2 1u
x2 x3 2u
xn 1 xn n 1u
xn an x1 an 1 x2 a1xn nu
Sistemin diferansiyel durum denklemleri matris vektör formunda aşağıdaki gibi yazılabilir.
x Ax Bu
y Cx Du
Buradaki matris ve vektörler aşağıdaki gibidir.
x1
0
x
0
2
x , A
xn 1
0
xn
an
1
0
0
1
0
0
an 1 an 2
0
1
0
2
C 1 0 0 0
, B ,
D 0 b0
1
n 1
n
a1
Bu sistemin transfer fonksiyonu sıfır başlangıç koşulları için diferansiyel denklemin her iki tarafının
Laplace dönüşümü alınarak aşağıdaki gibi yazılabilir.
G( s)
Örnek: Diferansiyel denklemi
durum denklemlerini bulunuz.
Y (s ) b0 s n b1s n 1 bn 1s bn
U ( s ) s n a1s n 1 an 1s an
y 18 y 192 y 640 y 160u 640u olarak verilen sistemin
Çözüm: Sistemin transfer fonksiyonunu Laplace dönüşümü ile aşağıdaki gibi yazabiliriz.
Y ( s)
160s 640
b0 s 3 b1s 2 b2 s b3
G( s)
U (s ) s 3 18s 2 192s 640 s 3 a1s 2 a2 s a3
a1 18 , a2 192 , a3 640 , b0 0 , b1 0 , b2 160 , b3 640
7
Durum değişkenleri aşağıdaki gibi seçildiğinde diğer katsayılar aşağıdaki gibi hesaplanır
0 b0 0
1 b1 a1 0 0
2 b2 a11 a2 0 160
3 b3 a1 2 a2 1 a3 0 2240
x1 y 0u
x2 ( y 0u ) 1u x1 1u
x3 ( y 0u 1u ) 2u x2 2u
ve sistemin durum değişkeni modeli aşağıdaki gibi elde edilir.
x1 0
x 0
2
x3 a3
1
0
a2
0 x1 1
1 x2 2 u
a1 x3 3
x1
y 1 0 0 x2 0u
x3
1
0 x1 0
x1 0
x 0
0
1 x2 160 u
2
x3 640 192 18 x3 2240
x1
y 1 0 0 x2
x3
3.3 Durum Denkleminin Kontrol Edilebilir Kanonik Formda Yazılması:
Aşağıdaki n ’inci derece diferansiyel denklem modelini ele alalım.
y ( n) (t ) a1 y ( n 1) (t ) ... an 1 y (t ) an y (t ) b0u ( n ) (t ) b1u ( n 1) (t ) ... bn 1u (t ) bn u (t )
Bu sistemin transfer fonksiyonu sıfır başlangıç koşulları için diferansiyel denklemin her iki tarafının
Laplace dönüşümü alınarak aşağıdaki gibi yazılabilir.
G( s)
Y (s ) b0 s n b1s n 1 bn 1s bn
U ( s ) s n a1s n 1 an 1s an
Aşağıdaki durum uzayı gösterimi kontrol edilebilir kanonik form olarak adlandırılır.
x1 0
x 0
2
xn 1 0
xn an
1
0
0
1
0
0
an 1 an 2
y bn anb0 bn 1 an 1b0
0 x1 0
0 x2 0
u
1 xn 1 0
a1 xn 1
x1
x
b1 a1b0 2 b0u
xn
3.4 Durum Denkleminin Gözlenebilir Kanonik Formda Yazılması:
Burada kontrol edilebilir kanonik formdan gözlenebilir kanonik forma geçmek için şu değişiklik
yapılır: A AT , B C T , C BT , D D
8
Aşağıdaki durum uzayı gösterimi gözlenebilir kanonik form olarak adlandırılır.
x1 0
x 1
2
xn 1 0
xn 0
0 0
0
0
0
y 0 0
an x1 bn anb0
0 an 1 x2 bn 1 an 1b0
u
0 a2 xn 1 b2 a2b0
1 a1 xn b1 a1b0
x1
x
2
1 b0u
xn 1
xn
3.5 Durum Denkleminin Köşegen (Diyagonal) Kanonik Formda Yazılması:
Bir sistemin transfer fonksiyonunun paydasının farklı kökler içermesi durumunda
Y ( s ) b0 s n b1s n 1 bn 1s bn b0 s n b1s n 1 bn 1s bn
U ( s) s n a1s n 1 an 1s an
(s p1 )( s p2 )(s pn )
Y ( s)
c
c2
cn
b0 1
U ( s)
s p1 s p2
s pn
transfer fonksiyonu kısmi kesirlere ayrıldıktan sonra durum değişkenleri aşağıdaki gibi seçilir.
x1
1
u sx1 p1 x1 u x1 p1 x1 u
s p1
x2
1
u sx2 p2 x2 u x2 p2 x2 u
s p2
xn
1
u sxn pn xn u xn pn xn u
s pn
y b0 c1 x1 c2 x2 cn xn
Böylece sistemin durum uzayı modeli köşegen kanonik formda aşağıdaki gibi yazılabilir.
0 0 x1 1
x1 p1
x 0
p2
x2 1
2
u
0 1
0 pn xn 1
xn 0
x1
x
2
y c1 c2 cn b0u
xn
9
3.6 Durum Denkleminin Jordan Kanonik Formda Yazılması:
Bir sistemin transfer fonksiyonunun paydasının farklı kökler içermesi durumunda
Y ( s ) b0 s n b1s n 1 bn 1s bn b0 s n b1s n 1 bn 1s bn
U ( s) s n a1s n 1 an 1s an
(s p1 )3 (s p4 )(s pn )
Y ( s)
c1
c2
c3
c4
cn
b0
3
2
U ( s)
( s p1 ) ( s p1 )
(s p1 ) s p4
s pn
transfer fonksiyonu kısmi kesirlere ayrıldıktan sonra durum değişkenleri aşağıdaki gibi seçilir.
x1
1
x2 sx1 p1 x1 x2 x1 p1x1 x2
s p1
1
x3 sx2 p1x2 x3 x2 p1 x2 x3
s p1
1
x3
u sx3 p1 x3 u x3 p1 x3 u
s p1
x2
x4
1
u sx4 p4 x4 u x4 p4 x4 u
s p4
xn
1
u sxn pn xn u xn pn xn u
s pn
y b0 c1 x1 c2 x2 cn xn
Böylece sistemin durum uzayı modeli köşegen kanonik formda aşağıdaki gibi yazılabilir.
1
0
0
x1 p1
x 0
p1
1
2
x3 0
0
p1
0
0
p4
x4 0
0
0
xn 0
y c1 c2
0 x1 0
x2 0
0 x3 1
u
0 x4 1
pn xn 1
x1
x
cn 2 b0u
xn
Y (s)
s3
2
olan sistemin durum uzayı modelini kontrol
U ( s) s 3s 2
edilebilir kanonik formda, gözlenebilir kanonik formda ve köşegen kanonik formda yazınız.
Örnek: Transfer fonksiyonu
Çözüm:
Y (s)
s3
b s 2 b1s b2
2
02
U ( s ) s 3s 2
s a1s a2
a1 3 , a2 2 , b0 0 , b1 1 , b2 3
10
kontrol edilebilir kanonik formda:
x1 0
x a
2 2
y b2 a2b0
1 x1 0
u
a1 x2 1
x
b1 a1b0 1 b0u
x2
1 x1 0
x1 0
x 2 3 x 1 u
2
2
x
y 3 1 1
x2
kontrol edilebilir kanonik formdan gözlenebilir kanonik forma geçmek için şu değişiklik yapılır:
A AT , B C T , C BT , D D
gözlenebilir kanonik formda:
x1 0 a2 x1 b2 a2b0
x 1 a x b a b u
2
1 1 0
1 2
x
y 0 1 1 b0u
x2
x1 0 2 x1 3
x 1 3 x 1 u
2
2
x
y 0 1 1
x2
köşegen (diyagonal) kanonik formda yazabilmek için transfer fonksiyonu kısmi kesirlere ayrılır:
G(s)
Y ( s)
s 3
s3
c
c
2
b0 1 2
U ( s ) s 3s 2 ( s 1)( s 2)
s 1 s 2
c1 Lim ( s 1)G ( s ) 2 ,
s ( 1)
c2 Lim ( s 2)G (s) 1 ,
s ( 2 )
b0 0 ,
p1 1 ,
p2 2
Y (s)
2
1
U ( s) s 1 s 2
1
u sx1 x1 u x1 x1 u
s 1
1
x2
u sx2 2 x2 u x2 2 x2 u
s2
y 2 x1 x2
x1
gözlenebilir kanonik formda:
x1 p1
x 0
2
y c1
0 x1 1
u
p2 x2 1
x
c2 1 b0u
x2
x1 1 0 x1 1
x 0 2 x 1 u
2
2
x
y 2 1 1
x2
4. Durum Denklemlerinden Transfer Fonksiyonunun Elde Edilmesi:
Bir sistemin durum değişkenlerinin farklı seçimleri durum denklemlerinin farklı kanonik
formlarda yazılabilmesini sağlar. Yani bir sistemin çok sayıda durum değişkeni modeli elde
11
edilebilir. Fakat transfer fonksiyonu gösterimi tektir. Doğrusal zamanla değişmeyen bir sistemin
durum uzayı gösterimi aşağıdaki gibi yazılabilir.
x Ax Bu
y Cx Du
Bu denklemlerin her iki tarafına Laplace dönüşümü uygulanırsa aşağıdaki gibi yazılabilir.
sX(s) x(0) AX( s) BU(s)
Y( s) CX( s) DU(s)
Durum denklemi X(s) ’e göre düzenlenirse aşağıdaki eşitlik elde edilir.
X( s ) ( sI A )1 x(0) ( sI A) 1 BU( s )
Bu denklemdeki X(s) çıkış denkleminde yerine konduğunda aşağıdaki eşitlik elde edilir.
Y( s ) C(sI A ) 1 x(0) C( sI A ) 1 BU( s ) DU( s )
Transfer fonksiyonunun tanımı gereği durum değişkenlerinin başlangıç koşullarının yerine x(0) 0
şeklinde yazıldığında aynı çıkış denklemi aşağıdaki gibi yazılabilir.
Y( s ) C( sI A )1 B D U( s )
Böylece durum denklemleri verilen tek girişli tek çıkışlı bir sistemin transfer fonksiyonu
G( s)
Y ( s)
C(sI A )1 B D
U ( s)
şeklinde hesaplanır. Burada (sI A) 1
Adj (sI A)
olduğu göz önüne alındığında yukarıdaki
sI A
denklem şu şekilde yazılabilir.
G( s) C
G( s)
Adj (sI A)
BD
sI A
C Adj (sI A )B sI A D
sI A
Transfer fonksiyonunun paydası karakteristik denklem olarak tanımlandığına göre, durum uzayı
modeli verilen bir sistemin karakteristik denklemi aşağıdaki gibi hesaplanır.
(s) sI A
Örnek: Durum uzayı modeli aşağıda verilen sistemin transfer fonksiyonunu elde ediniz.
1 x1 0
x1 0
x 2 3 x 1 u
2
2
,
x1
y 3 1
x2
G( s)
Y ( s)
?
U (s)
12
Çözüm:
T
s 1
sI A
s (s 3) 2 s 2 3s 2
2 s3
G ( s ) C( sI A ) 1 B D C
s 3 2
s 3 1
Adj (sI A )
s
1
2 s
,
s 3 1 0
Adj ( sI A )
1
s3
B D 3 1 2
2
sI A
s 3s 2 2 s 1 s 3s 2
olarak elde edilir.
5. Durum Geçiş Denklemi
Durum geçiş denklemi, doğrusal homojen olmayan durum denkleminin çözümü olarak
tanımlanır. Doğrusal zamanla değişmeyen bir sistemin durum uzayı modeli aşağıdaki gibidir.
x (t ) Ax(t ) Bu (t )
y (t ) Cx (t ) Du (t )
Durum denklemi diferansiyel denklem çözme yöntemleri ya da Laplace dönüşüm yöntemiyle
çözülebilir. Laplace dönüşümü ile çözüm yöntemi aşağıda verilmiştir.
sX ( s) x (0) AX ( s ) BU ( s )
Y ( s) CX ( s ) DU ( s )
( sI A) X ( s ) x(0) BU ( s)
X (s) (sI A)1 x(0) ( sI A) 1 BU (s )
Y (s) C (sI A)1 x (0) [C ( sI A)1 B D ]U ( s)
Transfer Fonksiyonu
Durum denkleminin çözümü:
1
1
x (t ) L
[( sI
A
) 1
]x
(
0)
L1
{(
sI
A)
BU
(s
)}
Doğal çözüm
Zorlanmış çözüm
L1[( sI A) 1 ]x(0) L1{( sI A) 1}B u (t )
Doğal çözüm
Zorlanmış çözüm
t
At
x(t ) e
x(
0) e A(t ) Bu ( ) d
0
Doğal çözüm
,
t0
Zorlanmış çözüm
Çıkış denklemi:
1
y (t )
L1
[C
( sI
A
)
]x
(
0)
L1
{[C
sI
A
)1
B
D
s
)}
(
]U
(
Doğal çözüm
1
1
Zorlanmış çözüm
1
CL [( sI A) ]x(0) CL {( sI A) 1}B D u (t )
Doğal çözüm
Zorlanmış çözüm
t
At
y (t ) Ce
(
0) Ce A(t ) Bu ( ) d Du (t )
x
0
Doğal çözüm
,
t0
Zorlanmış çözüm
Durum geçiş matrisi : e At L1{( sI A) 1} şeklinde ters Laplace dönüşümüyle hesaplanabilir.
13
1 x1 (t ) 0
x1 (t ) 0
x (t ) 2 3 x (t ) 1u (t ) olarak verilen sistemde girişin
2
2
At
t 0 için u (t ) 1 olması halinde, e durum geçiş matrisini ve x(t ) durum denkleminin zaman
domeni çözümünü hesaplayınız.
Örnek: Durum denklemi
Çözüm:
1
0
A
2 3
,
0
B
1
katsayı matrisleridir.
1 s 1
s 0 0
( sI A) 1
0 s 2 3 2 s 3
(sI A)1
s 3 1
1
s 3s 2 2 s
2
bulunur. A ’nın durum geçiş matrisi e At , ters Laplace dönüşümü alınarak aşağıdaki gibi bulunur.
2e t e 2t
e At L1[( sI A)1 ]
t
2t
2e 2e
e t e 2t
e t 2e 2 t
t
Durum geçiş denklemi ise, t 0 için, x(t ) e At x(0) e A(t ) Bu ( ) d denklemi yardımıyla
0
2 e t e 2 t
x (t )
t
2 t
2e 2 e
( t )
t 2e
e t e 2 t
e 2(t )
x(0) 0
( t )
e t 2 e 2 t
e 2(t )
2e
2 e t e 2 t
x (t )
t
2 t
2e 2 e
0.5 e t 0.5e 2t
e t e 2 t
x
(
0
)
e t 2e 2t
e t e 2 t
e (t ) e 2(t ) 0
d
e ( t ) 2e 2(t ) 1
,
t0
olarak elde edilir. Durum geçiş denklemindeki ikinci terimi (zorlanmış çözümü) elde etmenin diğer
bir yolu da ters Laplace dönüşümü yardımıyla L1{( sI A) 1 BU ( s )} ifadesini hesaplamaktır.
Burada zorlanmış çözüm
s 3 1 0 1
1
L1[( sI A)1 ]BU ( s ) L1 2
s 3s 2 2 s 1 s
1
1
s
L1 2
s
3
s
2
1
0.5 e t 0.5e 2t
e t e 2t
,
t0
olarak bulunur.
14
6. Sistem Modelleme Örnekleri
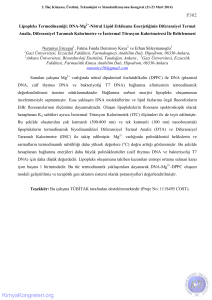
Örnek-1: Elektriksel sistem örneği (seri RLC devresi)
Yandaki seri RLC devresinin a) diferansiyel denklem
modelini, b) transfer fonksiyonu modelini, c) bir durum uzayı
modelini bulunuz.
Çözüm:
a) Diferansiyel denklem modeli:
Kirchhoff yasasına göre aşağıdaki dinamik denklemleri yazabiliriz.
di(t ) 1
1
i (t )dt e(t ) ,
i (t )dt v(t )
dt
C
C
1
1
dv (t )
dv (t )
i (t )dt v (t )
i (t )
i (t ) C
C
C
dt
dt
R i (t ) L
di(t ) 1
R i (t ) L
i (t )dt e(t )
dt
C
d 2v (t ) R dv(t ) 1
1
v (t )
e(t )
2
dt
L dt
LC
LC
(dinamik denklemler)
di (t )
d 2 v (t )
C
dt
dt 2
dv(t )
d 2v (t )
RC
LC
v(t ) e(t )
dt
dt 2
(diferansiyel denklem modeli)
b) Transfer fonksiyonu modeli:
Dinamik denklemlere sıfır başlangıç koşulları altında Laplace dönüşümü uygulandığında aşağıdaki
denklemler yazılabilir.
R I (s ) LsI ( s )
1 I (s)
E (s)
C s
,
1 I (s )
V (s)
C s
Burada ikinci denklemdeki I (s) birinci denklemde yerine yazıldığında, çıkış işaretinin Laplace
dönüşümünün giriş işaretinin Laplace dönüşümüne oranı aşağıdaki gibi bulunur.
1
V ( s)
LC
R
E ( s) s 2 s 1
L
LC
(transfer fonksiyonu modeli)
Transfer fonksiyonu modeli, diferansiyel denklem modeline sıfır başlangıç koşulları altında Laplace
dönüşümü uygulanarak da bulunabilir.
1
R
1
1
V (s )
2
LC
s V ( s ) sV ( s )
V ( s)
E ( s)
L
LC
LC
E (s) s 2 R s 1
L
LC
15
c) Durum uzayı modeli:
Diferansiyel denklem modelinin giriş tarafı türev içermediği için durum değişkenleri aşağıdaki gibi
seçilebilir.
d 2v (t ) R dv (t )
1
1
v (t )
e(t )
2
dt
L dt
LC
LC
x1 v
x2 v
(diferansiyel denklem modeli)
x1 x2 v
x1 0
x 1
2
LC
x
v 1 0 1
x2
x2 v
R
1
1
R
1
1
v
v
e x2
x1
e
L
LC
LC
L
LC
LC
1 x 0
1
e
R 1
x2
L
LC
(diferansiyel durum denklemi)
(çıkış denklemi)
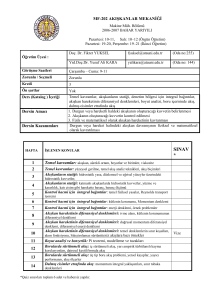
Örnek-2: Mekanik sistem örneği (kütle-yay-sönümleyici sistem modeli)
Yandaki mekanik sistemin a) diferansiyel denklem modelini,
b) transfer fonksiyonu modelini, c) bir durum uzayı modelini bulunuz.
Çözüm:
a) Diferansiyel denklem modeli:
Newton’un hareket yasasına göre
ederiz.
f (t ) f B (t ) f K (t ) Ma
f (t ) B
,
F Ma
burada
dx(t )
d 2 x (t )
Kx(t ) M
dt
dt 2
d 2 x(t ) B dx(t ) K
1
x (t )
f (t )
2
dt
M dt
M
K
eşitliğini bu sisteme uygularsak aşağıdaki eşitliği elde
f B (t ) B
dx (t )
dt
,
f K (t ) Kx(t )
kullanılırsa
eşitliğinden diferansiyel denklem modelini yazabiliriz.
(diferansiyel denklem modeli)
b) Transfer fonksiyonu modeli:
Diferansiyel denklem modeline sıfır başlangıç koşulları altında Laplace dönüşümü uygulanarak
çıkış işaretinin Laplace dönüşümünün giriş işaretinin Laplace dönüşümüne oranı aşağıdaki gibi elde
edilir.
16
B
K
1
s 2 X ( s)
sX (s )
X (s ) F ( s)
M
M
K
1
X ( s)
K
F (s ) s 2 B s K
M
M
(transfer fonksiyonu)
c) Durum uzayı modeli:
Diferansiyel denklem modelinin giriş tarafı türev içermediği için durum değişkenleri aşağıdaki gibi
seçilebilir.
d 2 x(t ) B dx(t ) K
1
x (t )
f (t )
2
dt
M dt
M
K
x1 x
x2 x
(diferansiyel denklem modeli)
x1 x2 x
x2 x
B
K
1
B
K
1
x
x f x2
x1 f
M
M
K
M
M
K
1 x 0
x1 0
1
f
x K
B 1
2
x2
M
M
K
x
(çıkış denklemi)
x 1 0 1
x2
(diferansiyel durum denklemi)
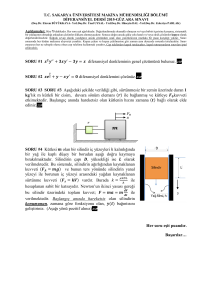
Örnek-3: Elektromekanik sistem örneği
(dc motor modeli)
Yandaki elektromekanik sistemin
a) diferansiyel denklem modelini,
b) transfer fonksiyonu modelini,
c) bir durum uzayı modelini bulunuz.
Çözüm:
a) Diferansiyel denklem modeli:
Kirchhoff yasasından : eg Rg ig Lg
Newton yasasından : M J
eg Rg ig Lg
dig
dt
Kb
2
K m ig J
d ç
dt 2
B
d ç
dt
dig
dt
d ç
d 2 ç
B
dt 2
dt
eb ,
,
eb K b
d ç
dt
(zıt elektro-motor-kuvvet gerilimi)
M K mig (motorun ürettiği döndürme momenti)
d ç
dt
2
J d ç
B d ç
ig
2
K m dt
K m dt
3
2
J d ç
B d ç
dt
K m dt 3 K m dt 2
dig
2
J d 2 ç
J d 3 ç
d
B d ç
B d ç
e g Rg
Lg
Kb ç
2
3
2
K m dt
K m dt
dt
K m dt
K m dt
17
d 2
d
d 3
d 2
d
K m eg Rg J 2ç Rg B ç Lg J 3ç Lg B 2ç K m K b ç
dt
dt
dt
dt
dt
d 3 ç Rg J Lg B d 2 ç Rg B K m K b d ç K m
2
eg
(diferansiyel denklem modeli)
dt
dt 3
Lg J
L
J
dt
L
J
g
g
b) Transfer fonksiyonu modeli:
Diferansiyel denklem modeline sıfır başlangıç koşulları altında Laplace dönüşümü uygulanarak
çıkış işaretinin Laplace dönüşümünün giriş işaretinin Laplace dönüşümüne oranı aşağıdaki gibi elde
edilir.
R J Lg B 2
R B K m Kb
s ç (s) g
s ç ( s) K m Eg ( s)
s 3 ç (s ) g
Lg J
Lg J
Lg J
Km
ç ( s)
Lg J
(çıkış açısal konum için transfer fonksiyonu)
E g ( s)
Rg J L g B 2 R g B K m K b
3
s
s
s
L
J
L
J
g
g
Km
ç ( s )
Lg J
(çıkış açısal hız için transfer fonksiyonu)
Eg ( s)
R
J
L
B
R
B
K
K
g
m b
s g
s2 g
L
J
L
J
g
g
Transfer fonksiyonunu elde etmek için Laplace dönüşümünü yukarıdaki dinamik denklemlere
doğrudan da uygulayabiliriz.
eg Rg ig Lg
dig
dt
Kb
d 2 ç
d
K mig J 2 B ç
dt
dt
d ç
dt
Eg ( s) ( Rg Lg s) I g ( s) K b s ç ( s)
K m I g ( s) ( Js 2 Bs)ç ( s)
Burada 2. denklemden I g (s ) bulunup önceki denklemde yerine yazıldığında, motora uygulanan
armatür geriliminden motorun açısal konumuna ve açısal hızına kadar olan transfer fonksiyonları
aşağıdaki gibi elde edilir.
K m E g ( s ) ( Rg Lg s )( Js 2 Bs) ç (s ) K m K b s ç ( s )
ç (s)
Eg ( s)
ç ( s )
Eg ( s)
Km
( Rg Lg s )( Js 2 Bs ) K m K b s
Km
( Rg Lg s )( Js B) K m K b
Km
Lg J
R J Lg B 2 Rg B K m K b
s
s
s3 g
L
J
L
J
g
g
Km
Lg J
R J Lg B Rg B K m K b
s
s2 g
L
J
L
J
g
g
18
c) Durum uzayı modeli:
durum değişkenleri: x1 ig , x2 ç için durum uzayı modelinin derecesi 2 olur.
eg Rg ig Lg
K m ig J
dç
dt
Rg
ig L
g
ç K m
J
dig
K bç
dt
Bç
dig
R
K
1
g ig b ç eg
dt
Lg
Lg
Lg
d ç
dt
Kb
1
Lg ig e
Lg g
B ç
0
J
Km
B
i g ç
J
J
ig
y 0 1
ç
(diferansiyel durum denklemi)
(çıkış denklemi)
durum değişkenleri: x1 ig , x2 ç , x3 ç için durum uzayı modelinin derecesi 3 olur.
e g R g ig L g
K m ig J
d ç
dt
dç
dt
dig
dt
K bç
Bç
dig
dt
d ç
dt
Rg
Lg
ig
Kb
1
ç eg
Lg
Lg
Km
B
i g ç
J
J
ç
Rg
ig Lg
Km
ç J
ç
0
Kb
Lg
B
J
1
ig
y 0 0 1 ç
ç
1
0
ig Lg
0 ç 0 eg
ç
0
0
(diferansiyel durum denklemi)
(çıkış denklemi)
19