AKARA ÜİVERSİTESİ
FEBİLİMLERİ ESTİTÜSÜ
DOKTORA TEZİ
L3 DE ALTMAİFOLDLARI DİFERESİYEL GEOMETRİSİ VE
KİEMATİĞİ ÜZERİE
Yılmaz TUÇER
MATEMATİK AABİLİM DALI
AKARA
2007
Her hakkı saklıdır.
ÖZET
Doktora Tezi
L3 DE ALTMANİFOLDLARIN DİFERENSİYEL GEOMETRİSİ VE KİNEMATİĞİ
ÜZERİNE
Yılmaz TUNÇER
Ankara Üniversitesi
Fen Bilimleri Enstitüsü
Matematik Anabilim Dalı
Danışman: Doç. Dr. Mustafa Kemal SAĞEL
诲诲诲瞎 瞐 瞐
Bu çalışma beş bölümden oluşmaktadır.
Birinci bölümde, 1-parametreli hareketler ve 1-parametreli homotetik hareketler üzerine
mevcut yayınlar tanıtılmıştır.
İkinci bölümde, n-boyutlu Öklid uzayında genel yüzey teorisi ile 1-parametreli
homotetik hareketler ve özelikleri verilmiştir.
Üçüncü bölümde, indeks=1 olan n-boyutlu yarı-Öklid uzayında genel yüzey teorisi ve
1-parametreli homotetik hareketler ve özelikleri verilmiştir.
Dördüncü ve beşinci bölümler çalışmanın orijinal kısmıdır.
Dördüncü bölümde, önce 3-boyutlu Öklid uzayında birim kürenin bir düzlem üzerinde
daha sonra herhangi bir alt manifoldun düzlem üzerinde ve son olarak da herhangi iki
alt manifoldun birbiri üzerinde pol eğrileri boyunca homotetik hareketi incelenmiş, bu
hareket için gerekli şartlar belirlenmiş ve birer örnek verilmiştir.
Beşinci bölümde, önce 3-boyutlu Lorentz uzayında hiperbolik kürenin bir timelike
düzlem üzerinde daha sonra L3 de herhangi bir alt manifoldun düzlem üzerinde ve son
olarak da L3 de herhangi iki alt manifoldun birbiri üzerinde pol eğrileri boyunca
homotetik hareketi incelenmiş, bu hareket için gerekli şartlar belirlenmiş ve birer örnek
verilmiştir.
2007, 152 sayfa
Anahtar Kelimeler: 1-parametreli homotetik hareket, Darboux matrisi, yarı Öklid
uzayı Lorentz manifoldu, rölatif hız.
i
ABSTRACT
Ph. D. Thesis
ON DIFFERENTIAL GEOMETRY AND KINEMATICS OF THE
SUBMANIFOLDS IN L3
Yılmaz TUNÇER
Ankara University
Graduate School of Natural and Applied Sciences
Department of Mathematic
Supervisor: Doç. Dr. Mustafa Kemal SAĞEL
This study contains five chapter.
In first chapter, present articles on 1-parameter motions and 1-parameter homothetic
motions are introduced.
In second chapter, in n-dimensional Euclid space, general surface theory and 1parameter homothetic motions and their properties are given.
In third chapter, in n-dimensional semi-Euclid space with index=1, general surface
theory and 1-parameter homothetic motions and their properties are given.
Fourth and fifth chapters are original part of this thesis
In fourth chapter, at first homothetic motion of unit sphere on tangent plane then
homothetic motion of any submanifold on its tangent plane and finally homothetic
motion of any two submanifolds, upon another, along the pole curves are examined in
3-dimensional Euclid space,
In fifth chapter, at first homothetic motion of hyperbolic sphere on its tangent plane then
homothetic motion of any submanifold on its tangent plane and finally homothetic
motion of any two submanifolds, upon another, along the pole curves are examined in
3-dimensional Lorentz space.
2007, 152 pages
Key Words : 1-parameter homothetic motion, Darboux matrix, Semi-Euclidean space
Lorentz manifold, relative velocity.
ii
TEŞEKKÜR
Çalışmalarım sırasında yakın ilgi ve önerileri ile bana destek olan sayın Prof. Dr. H.
Hilmi HACISALİHOĞLU (Ankara Üniversitesi Fen Fakültesi)’na, manevi desteğini
her zaman yanımda hissettiğim sayın Prof. Dr. Nuri KURUOĞLU (Bahçeşehir
Üniversitesi Fen Edebiyat Fakültesi)’na, çalışmalarım sırasında önemli katkılarda
bulunan ve yönlendiren danışman hocam sayın Doç. Dr. Mustafa Kemal SAĞEL
(Ankara Üniversitesi Fen Fakültesi)’e, çalışmalarımı yönlendiren, araştırmalarımın her
aşamasında bilgi, öneri ve yardımlarını esirgemeyen sayın Prof. Dr. Yusuf YAYLI
(Ankara Üniversitesi Fen Fakültesi)’ya, eleştirileriyle çalışmalarımı yönlendiren Prof.
Dr. Erdoğan ESİN (Gazi Üniversitesi Fen Edebiyat Fakültesi)’e, yapıcı eleştiri ve
katkılarından dolayı sayın Prof. Dr. H. Hüseyin UĞURLU (Gazi Üniversitesi Eğitim
Fakültesi)’a, çalışmalarım sırasında önemli katkılarda bulunan ve yönlendiren Doç. Dr.
Levent KULA (Ankara Üniversitesi Fen Fakültesi)’ya, bilimsel çalışmaların yanında
her aşamada bir hoca bir arkadaş olarak destek olan Yrd. Doç. Dr. Nejat EKMEKCİ
(Ankara Üniversitesi Fen Fakültesi)’ye teşekkürlerimi sunarım.
Yılmaz TUNÇER
Ankara, Ocak 2007
iii
İÇİ%DEKİLER
ÖZET......................................................................................................................
i
ABSTRACT...........................................................................................................
ii
TEŞEKKÜR..........................................................................................................
iii
SİMGELER DİZİ%İ.............................................................................................
v
1 GİRİŞ
1
2 En DE HOMOTETİK HAREKETLER
2.1 Diferensiyellenebilir Manifoldlar ……………….…………………………
5
2.2 En de 1-Parametreli Homotetik Hareketler ………………………………
9
3 E νn DE HOMOTETİK HAREKETLER
3.1 Simetrik Bilineer Formlar ………………….…………..….………………
13
3.2 Yarı-Öklid uzayları…………………..……………...………...……………
16
3.3 Yarı-Riemann Manifoldları ve Altmanifoldları ……...…..………….…...
19
3.4 Yarı-Riemann Manifoldlarında Bir Eğrinin Frenet Denklemleri ...……
21
3.5 E νn de 1-Parametreli Homotetik Hareketler ……………...………………
24
4. E3 DE ALT MA%İFOLDLARI% HOMOTETİK HAREKETİ
4.1 E3 de Kürenin Düzlem Üzerindeki Hareketi................................................
29
4.2 E3 de Bir Altmanifoldun Düzlem Üzerindeki Hareketi...............................
39
4.3 E3 de İki Altmanifoldun Birbiri Üzerindeki Hareketi……...……………..
49
5 E 13 DE ALT MA%İFOLDLARI% HOMOTETİK HAREKETİ
5.1 E 13 de Hiperbolik Kürenin Düzlem Üzerindeki Hareketi...........................
62
5.2 E 13 de Bir Altmanifoldun Düzlem Üzerindeki Hareketi..............................
76
5.3 E 13 de İki Altmanifoldun Birbiri Üzerindeki Hareketi…...…..…..……..... 105
KAY%AKLAR....................................................................................................... 150
ÖZGEÇMİŞ........................................................................................................... 152
iv
SİMGELER DİZİ%İ
F
Homotetik hareket
(X)
Hareketli pol eğrisi
(Y)
Sabit pol eğrisi
ki
(X) pol eğrisinin i-inci eğriliği
ki
(Y) pol eğrisinin i-inci eğriliği
∑
Düzlem
En
n-boyutlu Öklid uzayı
ν
İndeks
E νn
n-boyutlu yarı-Öklid uzayı
M
n-boyutlu hareketli Öklidyen (veya Lorentz) alt manifoldu
N
n-boyutlu sabit Öklidyen (veya Lorentz) alt manifoldu
ξ
M manifoldunun birim normal vektör alanı
η
N manifoldunun birim normal vektör alanı
D
Riemann manifoldu üzerindeki koneksiyon
D
M Öklidyen alt manifoldu üzerindeki koneksiyon
∇
Yarı-Riemann manifoldu üzerindeki koneksiyon
∇
Yarı-Riemann alt manifoldu üzerindeki koneksiyon
S
F homotetik hareketinin yuvarlanma kısmına ait matris
W
Darboux vektörü
SM
M alt manifoldunun şekil operatörü
S$
N alt manifoldunun şekil operatörü
SO (n)
Özel ortogonal grup
SO1 (n)
İndeksi=1 olan özel ortogonal grup
v
1. GİRİŞ
Hareket, fiziksel olarak bir katı cismin belli bir referans noktasına göre sürekli olarak
yer değiştirmesi olayıdır. 19. yüzyıl sonunda Newton’un hareket kanunlarını belirleyip
“Principia” adlı eserinde yayınladıktan sonra, özelikle fizikçilerin ilgisi cisimlerin
hareketleri üzerine yoğunlaşmıştır. 20. yüzyılda da bu çalışmalara matematikçiler de
katılmıştır. “The Rolling Of One Curve Or Surface Upon Another” başlıklı makalede,
iki eğrinin birbiri üzerinde 1-parametreli yuvarlanma hareketi ve n-boyutlu Öklid
uzayında hareket dönüşümü tanımlanmıştır (Clifford and McMahon 1961). Buna göre
A nxn tipinden ortogonal matris X 0 ve C nx1 matrisler olmak üzere 1-parametreli
hareket
X = AX 0 + C
(1)
şeklinde tanımlanmıştır. Burada A ve C matrisleri elemanları t zaman parametresine
bağlı sürekli ve diferensiyellenebilir fonksiyonlardır. X 0 hareket eden cismin üzerinde
t = t 0 başlangıç anındaki noktanın yervektörünü ve X de hareketin herhangi bir t anında
诲诲诲瞎 瞐 瞐
X 0 noktasının sabit uzaydaki karşılığı olan noktanın yervektörünü göstermektedir.
Dolayısıyla yukarıda verilen hareket denklemi, hareket esnasında, hareket eden ve
hareketsiz olan iki cisimden birinin diğerine göre hareketi olarak düşünülebilir. O halde
X 0 ve X noktaları, sırasıyla, hareketli ve sabit cisimler (veya hareketli ve sabit eğriler)
üzerindeki noktalardır. Hareketin sadece öteleme ve dönmeden ibaret olmasından
kaçınmak amacı ile
dA
dC
≠ 0 ve
≠0
dt
dt
alınmalıdır. Bir eğrinin bir diğer eğri üzerinde yuvarlanma hareketini temsil eden (1)
denkleminde eğrilerin değme noktaları yuvarlanan eğri için ani dönme merkezleridir.
Herhangi bir t anında bu noktaların geometrik yerini bulmak için
dX dA
dC
=
X0 +
=0
dt
dt
dt
denklemi çözülmelidir.
dA
matrisi regüler ise, çözüm tek olarak şu şekilde bellidir.
dt
1
(2)
dA
X 0 = −
dt
−1
dC
dt
(3)
dA
matrisi singüler ise, A ortogonal olduğundan, AT A = I yazılabilir. Eşitliğin her iki
dt
tarafının türevi alınırsa,
T
dAT
dA dAT
dAT
A + AT
=
A +
A=0
dt
dt dt
dt
elde edilir. Burada uzayın boyutu olan n sayısı tek ise,
dA
dt
AT
matrisi determinantı sıfır olan nxn tipinden antisimetrik matrisdir. n çift ise,
AT
dA
≠0
dt
olacaktır. O halde çift boyutlu Öklid uzayında AT
dA
matrisinin determinantı sıfır olan
dt
hareketlere singüler hareketler denir (Clifford and McMahon 1961). Hareketin
singüler olmadığı çift boyutlu Öklid uzayında, herhangi bir t anında ani dönme
merkezleri olan noktalar (3) denklemi ile verilir. Dolayısıyla bu noktaların Sabit
uzaydaki karşılıkları (1) denklemine göre
X = − AA −1C + C
(4)
ile verilir. Hareketin singüler olması durumunda ise; (2) denklemindeki A& matrisinin
[ ]
rankı r ve n=r+s olsun. Bu durumda rank A& , C& > r olup (2) denkleminin çözümü
yoktur. (2) denkleminin homojen kısmının çözüm uzayı s-boyutlu olup çözüm uzayının
ortonormal kabul edilen baz vektörleri (s-lineer bağımsız çözümleri) P1o , P2o ,..., Pso ise
{
PS = Sp P1o , P2o ,..., Pso
}
(5)
uzayı denklemin homojen kısmının çözüm uzayıdır. Bu uzaya s-boyutlu lineer uzay
veya eksen uzayı denir (Sabuncuoğlu 1982). Qo ; (2) denklemini sağlayan bir özel
çözüm ve homojen kısmın genel çözümü de
s
X 0 = ∑ λi Pi o
i =1
2
olmak üzere (2) denkleminin genel çözümü λi ler t nin fonksiyonları olan parametreler
olmak üzere,
s
X 0 = Qo + ∑ λi Pi o
(6)
i =1
şeklinde olacaktır (Clifford ve McMahon 1961). Böylece, sadece bir eğri için değil sboyutlu düzlemlerle oluşturulan yuvarlanma hareketi yapan (s+1)-boyutlu yüzey elde
edilmişdir. Burada her bir λi bu yüzey üzerinde striksiyon çizgilerini belirleyecektir.
Müller (1966)’da yayınladığı “Zur Bewegunss Geometrie In Räumen Höherer
Dimension” makalesinde bu hareketin regüler olması durumunda (3) ile elde edilen
noktaları ani pol noktaları olarak ve Clifford ve McMahon’un elde ettiği yüzeyi de
hareketli axoid yüzeyi olarak adlandırmış ve sabit uzayda oluşan sabit axoid yüzeyini
elde etmiştir. Yaylı (1985)’de hazırladığı “Cayley Formülü Üzerine Kinematik
Uygulama” başlıklı yüksek lisans tezinde, 3-boyutlu Öklid uzayında bu çözüme
alternatif olacak pratik bir metod vermiştir. Sabuncuoğlu (1982)’de hazırladığı
“Genelleştirilmiş Regle Yüzeyler” başlıklı doçentlik tezinde aksoid yüzeylerinin aslında
birer genelleştirilmiş regle yüzeyler olduğunu göstermiştir.
1977 de %omizu “Kinematics And Differential Geometry Of Submanifols” başlıklı
çalışmasında, 1-parametreli hareketleri öncelikle 3-boyutlu Öklid uzayındaki bazı özel
manifoldlar kullanarak incelemiş ve daha sonra n-boyutlu uzaydaki manifoldların pol
eğrileri boyunca hareketini incelemiştir. Nomizu K. Bu çalışmasında, pol eğrileri
boyunca paralel vektör alanları tanımlanmış ve yuvarlanmanın tanımını, hareketin açısal
hız vektörünün (Darboux vektörü) manifoldların (pol eğrilerinin) değme noktalarındaki
tanjant uzayda kalması ile tanımlamıştır.
Diğer taraftan, Olcaylar 1956 ve 1967 yıllarında, homotetik dönüşümler yardımıyla bir
düzlemin diğer düzlem üzerindeki homotetik hareketini tanımlamış ve 3-boyutlu
uzaydaki homotetik hareketleri incelemiştir. Hacısalihoğlu (1971)’de yayınladığı “On
The Rolling Of One Curve or Surface Upon Another” başlıklı makalesinde n- boyutlu
homotetik hareket denklemini, h homotetik sabit olmak üzere,
X = hAX 0 + C
3
(7)
şeklinde vermiş, (Clifford and McMahon 1961) ve (Müller 1966) makalelerinde
incelediği kavramları homotetik hareketler için ele almıştır. Bu çalışmada eğrilerin veya
yüzeylerin birbiri üzerindeki homotetik hareketinin her anında hem kayma hem de
yuvarlanma olduğu ve bunun yanında, n-boyutlu Öklid uzaylarında tanımlanan 1parametreli homotetik hareketlerin regüler hareketler olduğu ve hareketin her t anında
bir tek ani pol noktasına sahip olduğu gibi önemli sonuçlar elde edilmiştir. Ayrıca (7)
eşitliğinde h=1 olması durumunda (Clifford and McMahon 1961) ve (Müller 1966) in
çalışmalarında tanımladıkları 1-parametreli hareketler elde edilmektedir.
Karakaş
(1982)’de
hazırladığı
“Altmanifoldların
Diferensiyel
Geometrisi
ve
Kinematiğine Dair” başlıklı doktora tezinde, %omizu (1977)’deki çalışmasını, 3boyutlu Öklid uzayındaki homotetik hareketler için ele almıştır.
Çalışmamızın birinci bölümünü temel kavramlara ayırdık. İkinci bölümde, (%omizu
1977) ve (Karakaş 1982) çalışmalarını göz önüne alarak, 3-boyutlu Öklidyen uzaydaki
altmanifoldların homotetik hareketini, pol eğrilerinin Frenet elemanlarını, Darboux
çatısını ve pol eğrileri boyunca elde ettiğimiz ortonormal vektör alanlarını kullanarak,
homotetik hareket denklemlerini oluşturduk ve hareketin,
%omizu (1977)’de
tanımlanan anlamda yuvarlanma olması için gerekli ve yeterli şartları inceledik. Üçüncü
bölümde ise 3-boyutlu Lorentz uzayındaki altmanifoldların homotetik hareketlerini,
ikinci bölümde kullandığımız metotlarla inceledik. Ayrıca manifoldlar üzerindeki
eğrilerin karakterlerine göre hareketi homotetik hareket olacak şekilde ayrı ayrı
inceledik.
4
2. En DE HOMOTETİK HAREKETLER
Bu bölümde n-boyutlu Öklid uzayında yüzey teorisine ait temel kavramlar verilecek, 1parametreli homotetik hareketler ve buna ait temel teori işlenecektir.
2.1 En de Diferensiyellenebilir Manifoldlar
Tanım 2.1.1: Bir Hausdorff uzayı M olsun. M nin her bir noktası n-boytlu Öklid uzayı
E n in bir açık alt cümlesine homeomorf bir komşuluğa sahip ise M ye n-boyutlu
topolojik manifold denir (Matsushima 1972).
Tanım 2.1.2: Bir n-boyutlu topolojik manifold M olsun. M nin bir V açığı
Ψ :U → V
homeomorfizmi ile E n in bir U açığına homeomorf olarak verilsin. (U , Ψ ) ikilisine M
nin bir p noktasındaki koordinat komşuluğu denir.
E n deki bir {u1 ,..., u n } koordinat sistemi için
Ψ :U → V
olmak üzere
xi : u i o Ψ −1 : V → IR
1≤ i ≤ n
biçiminde tanımlı fonksiyonların {x1 ,..., x n } cümlesine V de bir lokal koordinat sistemi
denir (Matsushima 1972).
Tanım 2.1.3: Bir n-boyutlu topolojik manifold M ve Vi ⊂ M açık alt cümlelerinin {Vi }
ailesi M nin bir örtüsü olmak üzere; her bir Vi nin E n deki bir U i açık alt cümlesine
Ψi ile homeomorf olduğunu düşünelim. Bir indis cümlesi I olmak üzere, bu biçimde
elde edilen (U i , Ψi ) koordinat komşuluklarının
A = {(U i , Ψi )
i ∈ I}
ailesine M nin bir atlası denir. Eğer
Ψ (U i ) ∩ (U j ) ≠ φ
5
olacak şekildeki her (i, j ) ∈ I × I için
Ψi−1 o Ψ j ve Ψ j−1 o Ψi fonksiyonları r ≥ 1 için r defa diferensiyellenebilir ise A ya C r sınıfından atlas denir (Matsushima 1972).
Tanım 2.1.4: Bir n-boyutlu topolojik manifold M olsun. Eğer M nin C r -sınıfından
atlası varsa M ye C r -sınıfından diferensiyellenebilir manifold denir (Matsushima
1972).
Tanım 2.1.5: Bir diferensiyellenebilir manifold M, M den IR ye bütün
diferensiyellenebilir fonksiyonların cümlesi C ∞ ( M , IR ) ve p ∈ M olmak üzere
X p : C ∞ ( M , IR) → IR
fonksiyonu her f , g ∈ C ∞ ( M , IR ) ve her a, b ∈ IR için,
i. X p ( af + bg ) = a ( X p f ) + b( X p g )
ii. X p ( fg ) = ( X p f ) g ( p ) + f ( p )( X p g )
özeliklerini sağlıyor ise bu fonksiyona M nin p noktasındaki bir tanjant vektörü denir.
Bu biçimde tanımlı fonksiyonların cümlesi TM ( p) ile gösterilirse, her X p , Y p ∈ TM ( p ) ,
her f ∈ C ∞ ( M , IR) ve her a ∈ IR için
(X ⊕ Y )( f ) = X [ f ] + Y [ f ]
(a ⊗ X )( f ) = aX [ f ]
p
p
p
p
p
p
işlemleriyle birlikte TM ( p) , IR üzerinde bir vektör uzayı olup, M nin p noktasındaki
tanjant uzayı adını alır (Matsushima 1972).
Tanım 2.1.6: Bir diferensiyel manifold M olsun.
X : M 1
→ U TM ( p)
:1 örten
p∈M
p
→ X p ∈ TM ( p)
biçiminde tanımlı X dönüşümüne M manifoldu üzerinde bir vektör alanı denir
(Matsushima 1972).
6
Bir M manifoldu üzerindeki vektör alanlarının cümlesi χ (M ) ile gösterilir. Her
X , Y ∈ χ ( M ), a ∈ IR,
p ∈ M için
( X ⊕ Y )( p) = X p + Y p
(a ⊗ X )( p) = aX p
işlemleriyle birlikte χ (M ) cümlesi IR üzerinde bir vektör uzayıdır.
Tanım 2.1.7: Bir diferensiyel manifold M olsun.
, : χ ( M ) × χ ( M ) → C ∞ ( M , IR)
biçiminde, aşağıdaki özeliklere sahip bir iç çarpım tanımlı ise M ye bir Riemann
manifoldu ve
,
dönüşümüne de M üzerinde metrik tensör veya Riemann metriği
denir. X , Y ∈ χ ( M ), a ∈ IR için
i. X , Y = Y , X
ii. X + Y , Z = X , Z + Y , Z , Z ∈ χ ( M )
iii. aX , Y = a X , Y
iv. X , X = 0 ⇔ X ≠ 0
v. X,Y vektör alanları diferensiyellenebilir ise X , Y : M → IR fonksiyonu da
diferensiyellenebilirdir. Eğer (iii) özeliği yerine ∀X ∈ χ (M ) için, X , Y = 0 ⇒ Y = 0
özeliği alınırsa M manifolduna yarı-Riemann manifoldu denir (Hicks 1974).
Tanım 2.1.8: Bir yarı-Riemann manifoldu M olmak üzere
D : χ (M ) × χ (M ) → χ (M )
X ,Y
→ D( X , Y ) = D X Y
fonksiyonu ∀X , Y , Z ∈ χ ( M ) ve ∀f ∈ C ∞ ( M , IR ) için
i. D x (Y + Z ) = D X Y + D X Z
ii. D X +Y Z = D X Z + DY Z
iii. D fX Y = fD X Y
iv. D X ( fY ) = fD X Y + ( xf )Y
v. D X Y − DY X = [ X , Y ]
7
vi. X Y , Z = D X Y , Z + Y , D X Z
özeliklerini sağlarsa bu D fonksiyonuna M üzerinde bir Riemann koneksiyonu ve D X ’e
de X’e göre Riemann anlamında kovaryant türev operatörü denir ve Y vektör alanı
diferensiyellenebilir olmak üzere
D X Y = ( X [ y1 ],... X [ y n ])
biçiminde tanımlanır (Hicks 1974).
Örnek 2.1.1: n-boyutlu Öklid uzayı E n bir n-boyutlu diferensiyellenebilir manifold ve
ayrıca bir Riemann manifoldudur.
Tanım 2.1.9: Bir (n-1)-boyutlu diferensiyellenebilir manifold M olmak üzere
f : M → En
dönüşümü diferensiyellenebilir ve her p ∈ M için
( f ∗ ) p : TM ( p) → TE
n
( f ( p))
türev dönüşümü birebir ise f ( M ) = M manifolduna E n in bir (n-1)-altmanifoldu veya
bir hiperyüzeyi denir (Hicks 1974).
Tanım 2.1.10: E n in bir hiperyüzeyi M ve M nin birim normal vektör alanı N
olsun. ∀p ∈ M için
S : TM ( p ) → TM ( p )
X
→ S ( X p ) = D X P &
biçiminde tanımlı S dönüşümüne M nin şekil operatörü denir (Hicks 1974).
Tanım 2.1.11: E n nin bir hiperyüzeyi M olsun.
II : χ ( M ) × χ ( M ) → C ∞ ( M , IR)
X , Y
→ II ( X , Y ) = S ( X ), Y
biçiminde tanımlı II fonksiyonuna M üzerinde ikinci temel form denir (Hicks 1974).
8
2.2 En de 1-Parametreli Homotetik Hareketler
Tanım 2.2.1: I ⊂ IR sıfırı içeren bir aralık olsun. A∈SO(n), C∈IRn1
t’ ye göre
diferensiyellenebilen matrisler, h homotetik bir sabit ve Β = hA olmak üzere 1-1 ve
örten
F : En
→ E n
x
→ y = F ( x) = Βx + C
(2.2.1)
diferensiyellenebilir fonksiyonuna E n de 1-parametreli homotetik hareket denir
(Hacısalihoğlu 1971).
Her t için h(t ) ≠ sbt alınacaktır. Ayrıca sırf öteleme ve sırf dönmeden kaçınmak
için
dh
dA
dC
A+h
≠ 0 ve
≠0
dt
dt
dt
kabul edilecektir.
Bir x ∈ E n için F ( x) = Βx + C noktalarının geometrik yeri E n de bir eğri olup
bu eğriyi Y ile gösterelim. Bu durumda,
dY dΒ
dx dC
=
x+B +
dt
dt
dt dt
(2.2.2)
yazabiliriz.
Tanım 2.2.2: (2.2.2) eşitliğindeki,
ve B
dY
dΒ
dC
ye mutlak hız,
x+
ye sürüklenme hızı
dt
dt
dt
dx
ye de izafi hız denir (Hacısalihoğlu 1971).
dt
dΒ
Teorem 2.2.1: det
≠ 0 dır (Hacısalihoğlu 1971).
dt
Teorem 2.2.2: n-boyutlu Öklid uzayı E n nin homotetik hareketleri her n için regüler
hareketlerdir (Hacısalihoğlu 1971).
9
Teorem 2.2.3: n-boyutlu Öklid uzayı E n nin homotetik hareketi esnasında her t anında
bir tek ani pol noktası vardır (Hacısalihoğlu 1971).
Bir t anında sabit bir x ∈ E n noktasının F hareketi altındaki yörüngesi E n de bir eğri
olup bu eğriyi (Y(t)) (kısalığın hatırı için (Y) ile) gösterelim. (Y) eğrisinin her bir
noktası y ile gösterilirse y = F ( x ) dir. (Y) yörünge eğrisinin teğet vektör alanı
dY dF ( x)
=
dt
dt
olup, burada x = F −1 ( y ) yerine yazılırsa,
dY dF −1
=
F ( y)
dt
dt
(2.2.3)
olacaktır. Ayrıca x noktası t anında sabit olduğundan
dY dB
dC
=
x+
dt
dt
dt
(2.2.4)
ve (2.2.1) den de
x = B −1 ( y − C )
(2.2.5)
yazabiliriz. Bu x değeri (2.2.4) de yerine yazılırsa
dY dB −1
dC dB −1
dC
dB −1
=
B (y − C) +
=
B y + −
B C+
dt
dt
dt 1
dt23
dt44244dt
14
4
3
H (t )
V (t )
dY
= H (t ) y + V (t )
dt
(2.2.6)
Burada H(t) matrisi
H (t ) =
dh −1
dA T
h I+
A
dt23
dt23
1
1
ϕ (t )
(2.2.7)
S (t )
olur. Böylece (2.2.6) eşitliği
dF −1
F ( y ) = (ϕ (t ) I + S (t )) y + V (t )
dt
şeklinde ifade edilir.
10
(2.2.8)
Tanım 2.2.3: (2.2.8) eşitliğiyle verilen
dF −1
F dönüşümüne t anındaki ani hareket
dt
denir (%omizu 1977).
Teorem 2.2.4: B matrisi bir regüler matrisdir (Hacısalihoğlu 1971).
Tanım 2.2.4: Belli bir t 0 anında
dY (t )
=0
dt t
0
eşitliğini sağlayan y noktasına hareketin ani dönme merkezi
ve bu noktaların
geometrik yerine de ani dönme ekseni veya Darboux ekseni denir (%omizu 1977).
H(t) matrisi bir skalar ve bir anti-simetrik matrisin toplamı olarak yazılabildiğinden
H(t)=0 olması için gerek ve yeter şart ϕ (t ) = 0 ve S (t ) = 0 olmasıdır. Burada ϕ (t ) ve
S (t ) matrisleri, t anındaki ani hareketin, sırasıyla, kayma ve yuvarlanma kısmına ait
matrislerdir. Eğer ϕ (t ) = 0 ise ani hareket bir yuvarlanmadan, S (t ) = 0 ise hareket bir
kaymadan ibarettir. Her t anında hem kayma hem de yuvarlanma olsun istediğimiz için,
aksi söylenmedikçe ϕ (t ) ≠ 0 ve S (t ) ≠ 0 alınacaktır. Diğer taraftan (2.2.8) eşitliğinde
verilen ani harekette
dF −1
F ( y) = 0
dt
eşitliğini sağlayan bir y noktası varsa, bu noktaya sabit uzaydaki ani pol noktası denir.
Buna karşılık hareketli uzayda
dB −1
dB −1
dC
=0
B y−
B C+
dt
dt
dt
dB −1
dC
B (y − C) +
=0
1
4
2
4
3
dt
dt
x
dB
dC
x+
=0
dt
dt
eşitliğini sağlayan x noktası tek olarak bulunur ki, bu nokta da hareketli pol noktasıdır.
O halde ani dönme merkezleri ani pol noktalarıdırlar.
11
Tanım 2.2.5: U ∈ IR 3 olmak üzere,
S (U ) = W ΛU
(2.2.9)
eşitliğiyle tanımlı W vektörüne hareketin açısal hız vektörü veya Darboux vektörü
denir (%omizu 1977).
Tanım 2.2.6: M ve N, E 3 de iki yüzey olsun.
F :M
→ &
x
→ y = F ( x) = Βx + C
homotetik hareketi verilsin. Belli bir t anında W vektörü N ye teğet ise homotetik
harekete t anında bir kaymalı yuvarlanma hareketi denir. Her t için hareket kaymalı
yuvarlanma ise harekete M nin N üzerindeki kaymalı yuvarlanma hareketi denir
(%omizu 1977).
(2.2.7) eşitliğiyle verilen eşitliği göz önüne alırsak, S anti simetrik matrisiyle
belirli olan lineer dönüşümü yine S ile gösterelim. F : M
→ & bir kaymalı
yuvarlanma hareketi ise W Darboux vektörü, M ile N yüzeylerinin üzerinde seçilen (X)
ve (Y) eğrilerinin değme noktalarındaki ortak olan teğet düzlemde kalacağı aşikardır.
Bu sebeple S dönüşümü S : TY ( t ) &
→ Sp{η } şeklinde tanımlanır. Bu durumda şu
tanımı verebiliriz.
Tanım 2.2.7: M ve N, E n de iki (n-1)-hiper yüzey olsun.
F :M
→ &
x
→ y = F ( x) = Βx + C
homotetik hareketi verilsin. S : TY ( t ) &
→ Sp{η } ile belirli S dönüşümü TY ( t ) & uzayını
Sp{η } uzayının içine ve Sp{η } uzayını da TY (t ) & uzayının içine resmeden bir dönüşüm
ise F hareketine, M ve N üzerindeki (X) ve (Y) pol eğrileri boyunca M nin N üzerinde
bir kaymalı yuvarlanması denir (%omizu 1977).
12
3. Env DE HOMOTETİK HAREKETLER
Bu bölümde yarı-Öklid uzayları ve yarı-Riemann manifoldları genel olarak tanıtılacak
ve daha sonra yarı-Öklid uzayda 1-parametreli hareketler incelenecektir.
3.1 Simetrik Bilineer Formlar
Tanım 3.1.1: V bir reel vektör uzayı olsun. g : V × V → IR dönüşümü ∀a, b ∈ IR ve
∀u , v, w ∈ V için;
i. g (u , v) = g (v, u )
ii. g (au + bv, w) = ag (u , w) + bg (u , w)
iii. g (u , av + bw) = ag (u , v) + bg (u , w)
özeliklerine sahip ise, bu durumda g dönüşümüne V vektör uzayı üzerinde simetrik
bilineer form denir (O’%eill 1983).
Tanım 3.1.2: V reel vektör uzayı üzerinde bir simetrik bilineer form g olsun.
i. ∀u ∈ V ve v ≠ 0 için g (u , v) > 0 ise, bu durumda g simetrik bilineer formuna
pozitif tanımlı,
ii. ∀u ∈ V ve v ≠ 0 için g (u , v) < 0 ise, bu durumda g simetrik bilineer formuna
negatif tanımlı,
iii. ∀u ∈ V ve v ≠ 0 için g (u , v) ≥ 0 ise, bu durumda g simetrik bilineer
formuna yarı-pozitif tanımlı,
iv. ∀u ∈ V ve v ≠ 0 için g (u , v) ≤ 0 ise, bu durumda g simetrik bilineer formuna
yarı-negatif tanımlı denir (O’%eill 1983).
Tanım 3.1.3: V bir reel vektör uzayı ve g : V × V → IR ; V simetrik bilineer form
olsun.
i. g nin non-degenere olması için gerek ve yeter koşul g (u , v) = 0 ve ∀v ∈ V
için u = 0 olmasıdır.
13
ii. g nin degenere olması için gerek ve yeter koşul g ( w, v) = 0 ve ∀u ∈ V için
w ≠ 0 olmasıdır (O’%eill 1983, Duggal and Bejancu 1996).
V üzerindeki g non-degenere simetrik bilineer form V nin bir alt vektör uzayına
indirgenebilir. İndirgenen simetrik bilineer form degenere ve non-degeneredir.
Tanım 3.1.4: V bir reel vektör uzayı ve g : V × V → IR ; V simetrik bilineer form olsun.
V nin sıfır uzayı (radikal veya null uzayı);
RadV = {ξ ∈ V : g (ξ , v) = 0, v ∈ V }
şeklinde tanımlanır ve RadV ⊂ V dir. RadV alt uzayının boyutuna g nin sıfırlık
derecesi (nullity degree) denir ve nullV ile gösterilir (Duggal and Bejancu 1996).
Yukarıdaki tanıma göre; V üzerindeki g simetrik bilineer formunun dejenere (veya nondejenere) olması için gerek ve yeter koşul nullV > 0 ( veya nullV = 0 ) olmasıdır.
Örnek 3.1.1: 2-boyutlu reel vektör uzayı IR 2 ve g simetrik bilineer formu ∀x, y ∈ IR 2
için;
g : IR 2 × IR 2 → IR
( x, y ) → g ( x, y ) = − x1 y1 + x 2 y 2
şeklinde tanımlansın. Buna göre RadIR 2 = {(0,0 )} ve g nin sıfırlık derecesi null IR 2 = 0
olur. Tanım gereğince g non-dejeneredir.
Tanım 3.1.5: g simetrik bilineer formuna karşılık gelen kuadratik form; ∀v ∈ V için
h : V → IR
v → h (v ) = g ( v, v )
şeklinde tanımlı bir dönüşümdür. Bu durumda g, h yardımıyla ∀v, w ∈ V için;
g (v, w) =
1
{h(v + w) − h(v ) − h(w)}
2
şeklinde ifade edilebilir. V nin bir E = {e1 , e2 ,..., em } bazı için; λi ∈ IR ve vi ler de v
nin E bazına karşılık gelen koordinat bileşenleri olmak üzere
14
m
h (v ) = ∑ λ i (v i ) 2
i =1
formuna sahiptir. λi katsayılarının pozitif, negatif ve sıfır olanlarının sayıları,sırası ile,
p, q ve r ise, bu durumda h ye (p, q, r)-tipindendir denir ve ayrıca p + q + r = m dir
(Duggal and Bejancu 1996).
Önerme 3.1.1: V üzerinde g simetrik bilineer formuna ait (p,q,r)-tipinden bir kuadratik
form h olsun. Bu durumda
i. g nin dejenere (veya non-dejenere) olması için gerek ve yeter koşul r > 0(r = 0)
olmasıdır.
ii. g nin pozitif (vaya negatif) tanımlı olması için gerek ve yeter koşul
p=m
(q = m) olmasıdır.
iii. g nin pozitif (vaya negatif) yarı-tanımlı olması için gerek ve yeter koşul
q = 0, p > 0, r > 0
( p = 0, q > 0, r > 0) olmasıdır
(Duggal and Bejancu 1996).
Tanım 3.1.6: V nin bazı E = {e1 , e2 ,..., em } olsun. bij = g (ei , e j ) olarak tanımlanan
[ ]
B = bi , j
m× m
matrisine E bazına göre g nin matrisi denir. g simetrik olduğundan B
matrisi de simetriktir (O’%eill 1983, Duggal and Bejancu 1996).
Sonuç 3.1.1: V nin herhangi bir E bazına göre g nin matrisi B olsun. g nin non-dejenere
(veya dejenere) olması için gerek ve yeter koşul rank B = m, (rankB < m) olmasıdır
(O’%eill 1983, Duggal and Bejancu 1996).
Tanım 3.1.6: V bir reel vektör uzayı ve g : V × V → IR ; V üzerinde bir simetrik
bilineer form olsun.
g w : W × W → IR
negatif tanımlı olacak şekilde en büyük boyutlu W alt uzayının boyutuna g-simetrik
bilineer formun indeksi denir ve q ile gösterilir. Ayrıca, q ya V vektör uzayının da
indeksi denir ve ind V = q ile gösterilir (O’%eill 1983, Duggal and Bejancu 1996).
15
Buna göre 1 ≤ q ≤ boy V dir. q=0 olması için gerek ve yeter şart g nin pozitif yarıtanımlı olmasıdır.
Teorem 3.1.1: V nin bir {e1 , e2 ,..., en } ortonormal bazı için (∈1 ,∈2 ,...,∈n ) işaretindeki
negatif terimlerin sayısı V nin q indeksidir (O’%eill 1983).
3.2 Yarı-Öklid uzayları
Tanım 3.2.1: V reel vektör uzayı üzerinde bir g non-dejenere, simetrik bilineer formu
tanımlanırsa g ye bir skalar çarpım (yarı-Öklid metriği) ve V ye de yarı-Öklid uzayı
denir. p.q ≠ 0 ise g ye gerçek yarı-Öklid metriği denir.
Özel olarak g pozitif tanımlı ise, g ye Öklid metriği ve V ye de Öklid uzayı denir. q = 1
ise g ye Lorentz (Minkowski) metriği ve V ye de Lorentz uzayı veya Minkowski uzayı
denir. V de g dejenere ( null V > 0) ise, bu durumda V ye lightlike veya dejenere vektör
uzayı denir (O’%eill 1983, Duggal and Bejancu 1996).
Önerme 3.2.1: (W , g ) reel n-boyutlu dejenere vektör uzayı ve W nın sıfır uzayı
Rad W olsun. null W = r < n olmak üzere, Rad W nin V deki tümleyeni olan alt uzay
non-dejeneredir. Bu uzaya ekran uzayı (screen space) veya perde uzayı denir ve SW ile
gösterilir (Duggal and Bejancu 1996).
Tanım 3.2.2: Bir v ∈ V vektörü için;
i. g (v, v) > 0 veya v = 0 ise, bu durumda v vektörüne spacelike vektör,
ii. g (v, v) < 0 ise, bu durumda v vektörüne lightlike (null veya isotropik) vektör
denir (O’%eill 1983, Duggal and Bejancu 1996).
Tanım 3.2.3: V yarı-Öklid uzayı ve g de yarı-Öklid metriği olmak üzere;
i. Γ& = {v ∈ (V − {0}) : g (v, v) = 0} şeklinde tanımlı Γ& cümlesine V nin lightlike
konisi,
16
ii. ΓS = {v ∈ V : g (v, v) ≥ 0} şeklinde tanımlı ΓS cümlesine V nin spacelike
konisi,
iii. ΓT = {v ∈ (V − {0}) : g (v, v) < 0} tanımlı ΓT cümlesine V nin timelike konisi
denir (O’%eill 1983, Duggal and Bejancu 1996).
Tanım 3.2.4: V yarı-Öklid uzayı ve g de yarı-Öklid metriği olmak üzere;
. : V → IR
1
v → v = g (v , v ) 2
şeklinde tanımlı fonksiyona norm fonksiyonu denir. v ya da v nin normu veya v nin
boyu denir. Boyu 1 birim olan vektöre de birim vektör denir (O’%eill 1983, Duggal
and Bejancu 1996).
Tanım 3.2.5: u , v ∈ V için u ≠ 0 ve v ≠ 0 olmak üzere; g (u , v) = 0 ise, bu durumda u
ve v vektörlerine ortogonal vektörler denir ve u ⊥ v şeklinde gösterilir (O’%eill 1983,
Duggal and Bejancu 1996).
Uyarı: Unutulmamalıdır ki g nin indefinite olması durumunda; Öklid geometrisinde
olduğu gibi dik vektörler arasında dik açı olmak zorunda değildir. Örnek olarak lightlike
vektörler sıfırdan farklı vektörler olmalarına rağmen kendilerine dik vektörlerdir.
Teorem 3.2.1: Bir V ≠ {0} yarı-Öklid uzayı daima bir ortonormal baza sahiptir
(O’%eill 1983, Duggal and Bejancu 1996).
Örnek 3.2.1: m-boyutlu reel vektör uzayı IR m ve IR m nin bir ortonormal bazı
E = {e 1 = (1,0,...,0),..., e m = (0,0,...,1)} olsun. q indeksi 0 < q < m olmak üzere IR m
üzerinde bir yarı-Riemann metrik ∀x, y ∈ IR m için
q
g ( x, y ) = − ∑ xi y i +
i =1
m
∑x
j
yj
j = q +1
şeklindedir. Bu metrikle birlikte IR m bir yarı-Öklid uzayı olur ve IRqm ile gösterilir.
Özel olarak q=1 ise IR1m bir Lorentz (Minkowski) vektör uzayıdır.
17
Teorem 3.2.2: V vektör uzayı için ortonormal baz {e1 , e2 ,..., en } olsun. ∈i = g (ei , ei )
olmak üzere v ∈ V ;
n
v = ∑∈i g (v, ei )ei
(3.2.1)
i =1
olacak şekilde tek türlü yazılabilir (O’%eill 1983).
Tanım 3.2.6: (V , g ) m-boyutlu yarı-Öklid uzayı ve W da V nin bir alt uzayı olsun. g w
dejenere ise, bu durumda W ya V nin lightlike veya dejenere alt uzayı denir. Aksi halde
W ya V nin non-dejenere alt uzayı denir.
W ⊥ = {v ∈ V : g (v, w) = 0, ∀w ∈ W } cümlesine de W nın dik uzayı denir. Genellikle
W ∩ W ⊥ ≠ {0} dir (O’%eill 1983, Duggal and Bejancu 1996).
Önerme 3.2.2: (V , g ) m-boyutlu yarı-Öklid uzayı ve W da V nin bir alt uzayı olsun. Bu
durumda şu özelikler vardır:
i. boy W + boy W ⊥ = m
( )
ii. W ⊥
⊥
=W
iii. Rad W = Rad W ⊥ = W ∩ W ⊥
(O’%eill 1983, Duggal and Bejancu 1996).
Sonuç 3.2.1: V bir yarı-Öklid uzayı ve W da V nin bir alt uzayı olsun. Aşağıdaki
önermeler denktir:
i. W; V nin bir non-dejenere altuzayıdır,
ii. W ⊥ de V nin bir diğer non-dejenere altuzayıdır,
iii. W ve W ⊥ ; V nin tamamlayıcı (complementary) ortogonal altuzaylarıdır.
iv. V; W ve W ⊥ nin ortogonal direk toplamıdır, yani V = W ⊥ W ⊥ dir
(O’%eill 1983, Duggal and Bejancu 1996).
18
3.3 Yarı-Riemann Manifoldları ve Altmanifoldları
Tanım 3.3.1: M diferensiyellenebilir bir manifold olsun. M üzerinde non-dejenere ve
sabit indeksli (0,2)-tipinden g tensör alanına bir metrik tensör denir (O’%eill 1983,
Duggal and Bejancu 1996).
Başka bir ifadeyle M manifoldunun her p noktasındaki T p M tanjant uzayına g
çarpımı karşılık gelir ve g
p
p
skalar
nin indeksi her p ∈ M için aynıdır.
Tanım 3.3.2: M diferensiyellenebilir bir manifold ve g de M üzerinde sabit indeksli bir
metrik tensör olmak üzere; (M,g) ikilisine bir yarı-Riemann manifoldu denir (O’%eill
1983, Duggal and Bejancu 1996).
Tanım 3.3.3: (M,g) bir yarı-Riemann manifoldu olsun. g nin sabit indeksi q ya (M,g)
yarı-Riemann manifoldunun indeksi denir (O’%eill 1983, Duggal and Bejancu 1996).
q indeksli ve n-boyutlu bir yarı-Riemann manifoldu M qn ile gösterilir.
Tanım 3.3.4: M qn bir yarı-Riemann manifoldu olsun. Eğer
n ≥ 2 ve q = 1 ise, bu
durumda M 1n yarı-Riemann manifolduna Lorentz manifoldu denir (O’%eill 1983,
Duggal and Bejancu 1996).
Özel olarak q = 0 ise bu durumda M n bir Riemann manifoldu ve g de bir Riemann
metriğidir.
Tanım
3.3.5:
M qn
bir
yarı-Riemann
manifoldu
ve
α : I ⊂ IR → M qn
diferensiyellenebilir bir eğri olsun. α eğrisinin teğet vektör alanı T olmak üzere ;
i.
g (T , T ) > 0 ise, bu durumda α eğrisine spacelike eğri,
ii. g (T , T ) < 0 ise, bu durumda α eğrisine timelike eğri,
iii. g (T , T ) = 0 ise, bu durumda α eğrisine lightlike (veya null) eğri denir
(O’%eill 1983, Duggal and Bejancu 1996).
19
Eğrinin özel bir hali olan doğruyu göz önüne alalım. Doğrunun doğrultman
vektörü spacelike ise, doğru spacelike doğru, doğrultman vektörü timelike ise, doğru
timelike doğru ve doğrultman vektörü lightlike ise, doğru lightlike doğrudur.
Tanım 3.3.6: M vm ,m-boyutlu ve v indeksli bir yarı-Riemann manifoldu ve M qn , nboyutlu ve q indeksli bir diğer yarı-Riemann manifoldu olsun.
f : M vm → M qn
dönüşümü bir izometrik immersiyon ise ( rank f = m) M vm ya M qn nin bir yarıRiemann altmanifoldu denir (O %eill 1983, Ikawa 1985, %akanishi 1988).
Tanım 3.3.7: M vm , M qn nun yarı-Riemann altmanifoldu olsun. ξ , M vm nin bir normal
vektör alanı ve ∇ da, M vm üzerindeki koneksiyon olmak üzere;
Aξ : χ ( M vm ) → χ ( M vm )
X → Aξ ( X ) = −∇ X ξ
şeklinde tanımlı Aξ dönüşümüne M vm nin ξ ye göre şekil operatörü denir (O %eill
1983, Ikawa 1985, %akanishi 1988).
Tanım 3.3.8: M vm , M qn nin bir yarı-Riemann altmanifoldu olsun.O zaman
B : χ ( M vm ) × χ ( M vm ) → χ ( M vm ) ⊥
χ ( M vm ) ⊥ değerli , simetrik bilineer B fonksiyonuna M vm nin ikinci temel formu denir
(O %eill 1983, Ikawa 1985, %akanishi 1988).
Ayrıca , M qn üzerindeki koneksiyon ∇
olmak üzere , Gauss formülünden,
∀X , Y ∈ χ ( M vn ) için,
∇ X Y = ∇ X Y + B( X , Y )
dir. M vm nin bir normal vektör alanı ξ ve & ( M vm ) normal demeti üzerindeki
indirgenmiş koneksiyon ∇ ⊥ olmak üzere Weingarten formülünden,
∇ X ξ = − Aξ X + ∇ ⊥X ξ
20
yazılabilir (O %eill 1983, Ikawa 1985, %akanishi 1988).
Tanım 3.3.9: M vm nin bir ortonormal bazı {e1 , e2 ,..., em } olmak üzere;
H=
(ε
j
1 m
∑ ε j B(ei , e j )
m j =1
= ±1) şeklinde tanımlı H fonksiyonuna M vm in ortalama eğrilik fonksiyonu denir (O
%eill 1983, Ikawa 1985, %akanishi 1988).
Sonuç 3.3.1:
i. Aξ ( X ), ξ ve X e göre lineerdir.
ii. M vn üzerinde ξ normal vektör alanı için;
Aξ ( x), Y = B ( X , Y ), ξ
dir ( Ikawa 1985, %akanishi 1988).
3.4 Yarı-Riemann Manifoldlarda Bir Eğrinin Frenet Denklemleri
i. Spacelike ve Timelike Eğriler için Frenet Denklemleri
M qn (n ≥ 3) bir yarı-Riemann manifoldunda diferensiyellenebilir ve lightlike olmayan
bir eğri için Frenet denklemleri, aşağıdaki Teorem ile ifade edilmiştir (Ekmekci and
Ilarslan 1998).
Teorem 3.4.1:
M qn (n ≥ 3) bir yarı-Riemann manifold ve α : I ⊂ IR → M nq de
diferensiyellenebilir bir eğri olsun. Eğrinin herhangi bir noktasındaki Frenet vektörleri;
{V1 ,...,Vn } ve ε i −1 = g (Vi ,Vi )
olmak üzere, Frenet vektörleri ve türevleri arasındaki ilişki
aşağıdaki gibidir.
i. ∇ V1V1 = k1V2
ii. ∇ V1Vi = −ε i −2 ε i −1 k i −1Vi −1 + k iVi +1 ,
1< i < n
iii. ∇ V1Vn = −ε r −2 ε r −1 k r −1Vr −1
21
burada ∇, M qn yarı-Riemann manifoldu üzerindeki koneksiyondur.
İspat: Yukarıda ifade edilen Frenet denklemlerinin matris gösterimi ise şu
şekildedir.
∇ V1V1 0
∇ V
V1 2 − ε 0 ε 1 k1
∇ V1V3 0
... = ...
∇ V Vr −2 0
1
∇ V1 Vr −1 0
∇ V 0
V1 r
k1
0
− ε 1ε 2 k 2
...
0
0
0
0
k2
0
...
0
0
0
...
0
...
0
...
0
...
...
...
0
... − ε r −3ε r −2 k r − 2
...
0
0
0
0
...
k r −2
0
− ε r − 2ε r −1 k r −1
0 V1
0 V2
0 V3
... ...
0 Vr −2
k r −1 Vr −1
0 Vr
Özel olarak q=1 olsun. Bu durumda manifold Lorentz manifoldu olur. Buna göre
Lorentz manifoldunda bir eğrinin Frenet denklemlerini Teorem 3.4.1 yardımıyla n=3
için inceleyelim.
i. α , Lorentz manifoldunda timelike eğri olsun.
Bu durumda α nın Frenet vektör alanları, V1 timelike vektör alanı, V2 ve V3
spacelike vektör alanıdır.Buna göre, ε 0 = −1, ε 1 = 1, ε 2 = 1 olacaktır. Bu durumda
Teorem 3.4.1 den aşağıdaki Frenet denklemlerini yazabiliriz.
∇ V1 V1 0
∇ V1V2 = k1
∇ V V3 0
1
k1
0
− k2
0 V1
k 2 V2
0 V3
(3.4.1)
ii. α , Lorentz manifoldunda spacelike eğri olsun.
Bu durumda α eğrisi iki farklı Frenet denklem sistemine sahiptir.
1. α eğrisinin vektör alanları; V1 spacelike vektör alanı, V2 timelike vektör alanı ve V3
de spacelike vektör alanı olsun. Buna göre ε 0 = 1, ε 1 = −1, ε 2 = 1 olacaktır. Bu durumda
Teorem 3.4.1 den n=3 için aşağıdaki Frenet denklemlerini yazabiliriz.
22
∇ V1 V1 0
∇ V1V2 = k1
∇ V V3 0
1
k1
0
k2
0 V1
k 2 V2
0 V3
(3.4.2)
2. α eğrisinin vektör alanları; V1 spacelike vektör alanı, V2 uzay benzeri vektör alanı
ve V3 de timelike vektör alanı olsun. Buna göre ε 0 = 1, ε 1 = 1, ε 2 = −1 olacaktır. Bu
durumda Teorem 3.4.1 den n=3 için aşağıdaki Frenet denklemlerini yazabiliriz.
∇ V1 V1 0
∇ V1V2 = − k1
∇ V V3 0
1
k1
0
k2
0 V1
k 2 V2
0 V3
(3.4.3)
ii. Lorentz Manifoldlarında Lightlike Eğriler için Frenet Denklemleri
α , (m+2)-boyutlu (M,g) Lorentz manifoldunda bir lightlike eğri ve bu eğrinin
teğet vektör alanı λ , M nin Levi-Civita koneksiyonu ∇ ile gösterilsin. Eğrinin Frenet
vektörleri,
{λ , & ,W1 ,...,Wm }
olsun.
Burada
λ
ve
N
lightlike
vektörler,
Wi , (1 ≤ i ≤ m) ’ler de spacelike vektörlerdir. Buna göre α nın Frenet denklemleri
aşağıdaki gibidir:
∇ λ λ = hλ + k1W1
∇ & = − h& + k W + k W
2 1
3 2
λ
∇ λ W1 = −k 2 λ − k1 & + k 4W2 + k 5W3
∇ λ W2 = −k 3 λ − k 4W1 + k 6W3 + k 7W4
...
∇ λ Wm− 2 = −k 2 m −5Wm− 4 − k 2 m −4Wm −3 + k 2 m −2Wm −1 + k 2 m−1Wm
∇ λ Wm−1 = −k 2 m −3Wm−3 − k 2 m− 2Wm− 2 + k 2 mWm
∇ W = − k W − k W
2 m −1 m − 2
2 m m −1
λ m
burada h,
{k1 ,..., k 2m }
(3.4.4)
diferensiyellenebilir fonksiyonlardır (Duggal and Bejancu,
1996).
Özel olarak m=1 için (3.4.4) denklemleri aşağıdaki şekli alır;
∇ λ λ = hλ + k1W1 , ∇ λ & = −h& + k 2W1 , ∇ λW1 = − k 2 λ − k1 &
23
(3.4.5)
Bu denklemlerde uygun bir p parametre değişimiyle, h=0 alınabilir ve diğer denklemler
değişmeden kalır. Uygun p parametresine, eğrinin seçilmiş parametresi denir. Buna göre
(3.4.5) denklemleri aşağıdaki şekli alırlar:
∇d
dp
d
d
= k1W1 , ∇ d & = k 2W1 , ∇ d W1 = − k 2
− k1 &
dp
dp
dp
dp
(3.4.6) denklemlerinde özel olarak
(3.4.6)
d
= X , − & = Y , W1 = Z alınırsa
dp
∇ X X = k1 Z , ∇ X Y = k 2 Z , ∇ X Z = − k 2 X + k1Y
(3.4.7)
elde edilir. Elde edilen bu son denklemler, lightlike eğriler için Cartan denklemleri
olarak da bilinmektedir ( Duggal and Bejancu 1996).
3.5 E vn de 1-Parametreli Homotetik Hareketler
Tanım 3.5.1: I ⊂ IR sıfırı içeren bir aralık olsun. A ∈ SOv (n ) , C∈IRn1 t ye göre
diferensiyellenebilen matrisler, h homotetik bir sabit ve Β = hA olmak üzere 1-1 ve
örten
F : E vn
→ Evn
x
→ y = F ( x) = Βx + C
(3.5.1)
n
diferensiyellenebilir fonksiyonuna Ev de 1-parametreli homotetik hareket denir (Baştaş
1997).
Her t için h(t ) ≠ sbt alınacaktır. Ayrıca sırf öteleme ve sırf dönmeden kaçınmak için
dh
dA
dC
A+ h
≠ 0 ve
≠0
dt
dt
dt
kabul edilecektir.
n
Bir x ∈ E n için F ( x) = Βx + C noktalarının geometrik yeri Ev de bir eğri olup bu
eğriyi (Y) ile gösterelim. Bu durumda,
dY dΒ
dx dC
=
x+B +
dt
dt
dt dt
yazabiliriz.
24
(3.5.2)
Tanım 3.5.2: (3.5.2) eşitliğindeki,
ve B
dY
dΒ
dC
ye mutlak hız,
x+
ye sürüklenme hızı
dt
dt
dt
dx
ye de izafi hız denir (Hacısalihoğlu 1971).
dt
Sonuç 3.5.1: B& X + C& =0 denkleminin çözümü;
i)
Timelike ve spacelike bölgede det B& ≠ 0 dır.
ii)
Null bölgede det B& = 0 dir
(Baştaş 1997).
Teorem 3.5.1: Timelike ve spacelike bölgede hareket regülerdir ve her t anında bir tek
pol noktasına sahiptir (Baştaş 1997).
Teorem 3.5.2: Null bölgede hareket regüler değildir. Dolayısıyla pol noktası yoktur ve
null vektörleri tek değildir (Baştaş 1997).
Teorem (3.5.1)’e göre B& X + C& =0 denkleminin bir tek çözümü vardır ve X = −( B& ) −1 C&
dir. X ≡ q0
alırsak, q 0 ; Q
pole noktasının hareketli uzaydaki yer vektörünü
göstermektedir. Q ‘nun sabit uzaya göre yer vektörünü q ile gösterirsek;
Y = BX + C = B(−( B& ) −1 C& ) + C ⇒ q = Bq 0 + C
olacaktır. Burada X = − B& −1C& hareketli pol eğrisi, Y = − BB& −1C& + C sabit pol eğrisinin
denklemleridir.
q = Bq 0 + C
denkleminin
t
ye
göre
türevini
alırsak
q& = B& q 0 + C& + Bq& 0 bulunur. Burada B& q 0 + C& = 0 ise hareketli pol eğrisinin sürüklenme
hızı sıfırdır. O halde q& = Bq& 0 olacaktır. Bu denklem Q noktasının t anındaki kayma
hızını verir. Bunun anlamı pole eğrilerinin değme noktalarındaki teğet vektörleri g
dönmesi ve h ötelemesinden sonra çakışırlar. q& = Bq& 0 eşitliğinde Lorentz anlamında
norm alırsak;
q& = Bq&0
q& dt = Bq&0 dt = hgq& 0 dt = h gq&0 dt = h q& 0 dt
25
ds ve ds 0 yay elemanları olmak üzere; ds = q& dt ve ds 0 = q& dt ⇒ ds = h ds 0 olur.
Teorem 3.5.3: Eνn uzayında homotetik hareket boyunca null olmayan bölgelerde pole
eğrileri birbirleri üzerinde kayarak yuvarlanırlar. Bu kayma-yuvarlanma hareketinin
katsayısı ± h dır. Özel olarak h=1 alınırsa homotetik olmayan adi harekette ds = ds 0
olacağından pole eğrileri söz konusu bölgede birbiri üzerinde kaymaksızın yuvarlanırlar
(Baştaş 1997).
Bir t anında sabit bir x ∈ E n noktasının F hareketi altındaki yörüngesi E n de bir eğri
olup bu eğriyi (Y(t)) (kısalığın hatırı için (Y) ile) gösterelim. (Y) eğrisinin her bir
noktası y ile gösterilirse y = F (x) dir. (Y) yörünge eğrisinin teğet vektör alanı
dY dF ( x)
=
dt
dt
olup, burada x = F −1 ( y ) yerine yazılırsa,
dY dF −1
=
F ( y)
dt
dt
(3.5.3)
olacaktır. Ayrıca x noktası t anında sabit olduğundan
dY dB
dC
=
x+
dt
dt
dt
(3.5.4)
x = B −1 ( y − C )
(3.5.5)
ve (3.5.1) den
yazabiliriz. Bu x değeri (3.5.4) de yerine yazılırsa
dY dB −1
dC dB −1
dC
dB −1
=
B (y − C) +
=
B y + −
B C+
dt
dt
dt 1
dt23
dt44244dt
14
4
3
H (t )
V (t )
dY
= H (t ) y + V (t )
dt
(3.5.6)
Burada H(t) matrisi
H (t ) =
dh −1
dA T
h I+
A
dt
dt
123
123
ϕ (t )
S (t )
olur. Böylece (3.5.6) eşitliği
26
(3.5.7)
dF −1
F ( y ) = (ϕ (t ) I + S (t )) y + V (t )
dt
(3.5.8)
şeklinde ifade edilir. AεAt = ε olduğundan her iki tarafın türevi alınırsa,
( A& ε ) At + ( Aε ) A& t = 0
Ω = A& εAt alınırsa Ω t = AεA& t olup - Ω = Ω t elde edilir ki bu da Ω nın bir anti simetrik
matris olduğunu gösterir. AεAt = ε olduğundan,
Ω = A& ε (εA−1ε ) = A& A−1ε
Ωε = A& A−1
elde edilir. S = Ωε denirse,
S t = εΩ t = −Ωε = −εSε
bulunur. Bu ise S matrisinin Lorentz anlamında anti simetrik matris olduğu anlamına
gelir (Baştaş 1997).
H(t) matrisi bir skalar ve bir anti-simetrik matrisin toplamı olarak yazılabildiğinden
H(t)=0 olması için gerek ve yeter şart ϕ (t ) = 0 ve S (t ) = 0 olmasıdır. Burada ϕ (t ) ve
S (t ) matrisleri, t anındaki ani hareketin, sırasıyla kayma ve yuvarlanma kısmına ait
matrislerdir. Eğer ϕ (t ) = 0 ise ani hareket bir yuvarlanmadan, S (t ) = 0 ise hareket bir
kaymadan ibarettir. Her t anında hem kayma hem de yuvarlanma olsun istediğimiz için,
aksi söylenmedikçe ϕ (t ) ≠ 0 ve S (t ) ≠ 0 alınacaktır. Diğer taraftan (3.5.8) eşitliğinde
verilen ani harekette
dF −1
F ( y) = 0
dt
eşitliğini sağlayan bir y noktası varsa, bu noktaya sabit uzaydaki ani pol noktası denir.
Buna karşılık hareketli uzayda
dB −1
dB −1
dC
B y−
B C+
=0
dt
dt
dt
dB −1
dC
B (y − C) +
=0
1
4
2
4
3
dt
dt
x
dB
dC
x+
=0
dt
dt
27
eşitliğini sağlayan x noktası tek olarak bulunur ki, bu nokta da hareketli pol noktasıdır.
O halde ani dönme merkezleri ani pol noktalarıdırlar (Baştaş 1997).
28
4. E3 DE ALTMA%İFOLDLARI% HOMOTETİK
HAREKETİ
Bu bölümde önce birim kürenin düzlem üzerinde sonra bir altmanifoldun diğer bir
düzlem üzerinde daha sonra bir altmanifoldun başka bir altmanifold üzerindeki
homotetik hareketi incelenecektir.
4.1 E3 de Kürenin Düzlem Üzerindeki Hareketi
M=(0,0,0) merkezli birim küre S 2 ve xo = (0,0,1) ∈ S 2 noktasındaki tanjant düzlemi ∑
olsun. E 3 deki koordinat sistemi
{x1 , x2 , x3 }
olmak üzere S 2 küresinin ve ∑
düzleminin denklemleri, sırasıyla, x12 + x 2 2 + x3 2 = 1 ve x3 = 1 dir. Kürenin düzlemle
teğet olduğu noktadan başlayan birim hızlı diferensiyellenebilir küresel eğri X (t ) olsun.
S 2 küresinin ∑ düzlemi üzerindeki homotetik hareketi boyunca ∑ düzlemi, S 2 ile
değme noktalarında S 2 in teğet düzlemi olacağından
Bx = he3
alalım. Bu durumda F homotetik hareketini
F : S2
→ ∑
x
→ y = F ( x ) = Bx + C
şeklinde tanımlayabiliriz. Burada B = hA , A ∈ SO(3) ve C matrisleri, elemanları t ye
göre diferensiyellenebilir fonksiyonlar olan matrislerdir.
Diğer taraftan x noktasının yörüngesi de ∑ düzlemi üzerinde bir pol eğrisi olup, x
noktaları küre üzerinde bir X(t) (kısalığın hatırı için (X) ) eğrisi üzerindeki noktalar ise,
(Y) eğrisi, (X) eğrisinin homotetik hareketi sonucunda ∑ düzlemi üzerinde oluşturduğu
eğri olduğu düşünülürse
dY
dX
= B
dt
dt
olup eğer (X) birim hızlı eğri ise
29
(4.1.1)
dY
=h
dt
olacaktır. Yani hareketli ve sabit uzaydaki pol eğrileri farklı çizilme hızlarına sahiptir.
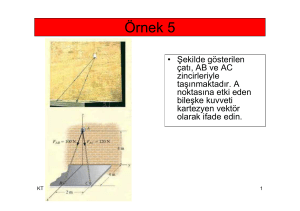
Şekil 4.1.1
S 2 üzerinde (X) hareketli pol eğrisi boyunca b1 , b2 ve (Y) sabit pol eğrisi boyunca
tanımlayacağımız a1 , a 2 vektör alanları için hareketi şekilde
b1 = hB −1 a1 ve b2 = hB −1 a 2
olacak şekilde tanımlayalım. Bu durumda (X) eğrisi boyunca {b1 ,b2 } sistemi S 2 nin
teğet düzlemleri için ortonormal baz olup {b1 , b2 , X } hareketli uzayın baz sistemi ve
buna karşılık sabit uzayda da (Y) sabit pol eğrisi boyunca {a1 , a 2 , e3 } sabit baz sistemi
olacaktır. Dolayısıyla sabit uzayda F ( x) = y değme noktalarının ve ani pol noktalarının
geometrik yeri olacak şekilde S 2 nin ∑ düzlemi üzerinde (X) eğrisi boyunca bir F
homotetik hareketi vardır ve tekdir. Gerçekten, F1 ve F2 homotetik hareketi için
Β1 ( X (t )) = he3 ve Β 2 ( X (t )) = he3 olmak üzere
Y (t ) = F1 ( X (t )) = B1 ( X (t )) + C1 ve Y (t ) = F2 ( X (t )) = B2 ( X (t )) + C 2
şeklinde tanımlı olacak şekilde var olsun. Β1 ( X (t )) = he3
ve Β 2 ( X (t )) = he3
olduğundan bu iki eşitliği taraf tarafa çıkarırsak
(Β 2 − B1 )( X (t )) = (−h + h)e3
⇒
B2 − B1 = 0 ⇒ B2 = B1
elde ederiz. O halde B matrisi tektir.
(F1 − F2 )( X (t )) = C1 − C 2 = 0
eşitliğinden de C matrisinin tek olacağını söyleriz. Böylece F homotetik hareketi tektir.
30
Sırasıyla (X) ve (Y) pol eğrileri boyunca {b1 , b2 , X } ve {a1 , a 2 , e3 } hareketli ve sabit baz
vektörlerini bulalım. X ∈ Sp{T , & , B} için,
X (t ) = λ0T + λ1 & + λ 2 B
X (t ), X (t ) = 1 ⇒
(4.1.2)
dX (t )
, X (t ) = 0 ⇒ T , X (t ) = 0 ⇒ λ0 = 0
dt
Bu durumda
X (t ) = cosψ & + sinψ B
(4.1.3)
elde edilir.
Önerme 4.1.1: S2 birim küresi üzerinde birim hızlı bir eğri (X) ve T, N, ve B Frenet
vektörleri olsun. S2 birim küresinin yarıçap vektörü X ve X ile N arasındaki açı
fonksiyonu ψ olmak üzere ψ açısı ile eğrinin k 2 eğriliği arasında ψ ′ + k 2 = 0 bağıntısı
vardır.
İspat: (4.1.3) eşitliğinden
X (t ) = cosψ & + sinψ B
dX
= −k1 cosψT − (ψ ′ + k 2 ) sin ψ & + (ψ ′ + k 2 ) cosψ B
dt
yazabiliriz.
dX
= T ve T , T = 1 , T , & = 0 , T , B = 0 eşitliklerinden,
dt
cosψ = −
1
, − (ψ ′ + k 2 ) sin ψ = 0 ,
k1
(ψ ′ + k 2 ) cosψ = 0
elde edilir. Buradan da
ψ ′ + k2 = 0
sonucu elde edilir.
(4.1.3) eşitliğinden
XΛT = cosψ &ΛT + sin ψ BΛT
⇒ XΛT = sin ψ & − cosψ B
0
0 T
T 1
XΛT = 0 sinψ − cosψ &
X 0 cosψ
sinψ B
144424443
Q
olup {T , X , XΛT } ortonormal vektör alanı sistemidir. Ayrıca
31
(4.1.4)
k1i = T , ei , k 2i = & , ei , k 3i = B, ei ,
i = 1,2,3
olmak üzere
T k11 k12 k13 e1
& = k
21 k 22 k 23 e2
B k 31 k 32 k 33 e3
1442443
(4.1.5)
P
Sp{b1 ,b2 } sistemi ile Sp{T , XΛT } arasındaki dönme açısı θ ise,
b1 cos θ sin θ 0 T
b = − sin θ cos θ 0 XΛT
2
X 0
0
1 X
14442444
3
(4.1.6)
R
şeklinde olsun. (4.1.4) , (4.1.5) ve (4.1.6) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] b2 = e2
4
4244
3
A1
X e3
T
T
T
(4.1.7)
elde edilir. Diğer taraftan (4.1.7) eşitliği kullanılarak
b1
e1
d dA1T
e2
b2 =
dt
dt
e3
X
ve W1 =
dA1T
A1 olmak üzere,
dt
db1
dt
0
k1 cos θ cosψ b1
θ ′ + k1 sinψ
db
2
= − (θ ′ + k1 sinψ )
0
− k1 sin θ cosψ b2
dt
− k1 cos θ cosψ k1 sin θ cosψ
X
0
dX 1
44444444424444444443
dt
W1
(4.1.8)
elde edilir.
Sonuç 4.1.1: θ ′ + k1 sinψ = 0 ise b1 ve b2 vektör alanları (X) eğrisi boyunca paralel
vektör alanlarıdır.
32
İspat : E 3 ’ün Riemann koneksiyonu D , S 2 üzerinde Gauss anlamında kovaryant türev
operatörü de D ve S 2 küresinin şekil operatörü S olsun. Hareketin her t anında b1 (t )
ve X(t) vektör alanları (4.1.5), (4.1.6) ve (4.1.7) eşitliklerinden
b1 = cos θ T + sin θ sinψ & − sin θ cosψ B ve X (t ) = cosψ & + sinψ B
olduğunu biliyoruz.
D T b1 = DT b1 + S (T ), b1 X
= DT (cos θ T + sin θ sinψ & − sin θ cosψ B)
+ T , cos θ T + sin θ sin ψ & − sin θ cos ψ B (cos ψ & + sin ψ B )
ψ ′ cosψ sin θ
& − k1 sinψ sin θ T
= −θ ′ sin θ T + k1 cos θ & +
+ θ ′ sinψ cos θ
− ψ ′ sinψ sin θ
B + k 2 cosψ sin θ &
+ k 2 sinψ sin θ B −
+ θ ′ cosψ cos θ
+ cosψ cos θ & + sinψ cos θ B
(ψ ′ + k 2 ) cosψ sin θ
(ψ ′ + k 2 )sinψ sin θ
= −{θ ′ + k1 sinψ }sin θ T + θ ′ sinψ +
& +
B
+ (sinψ − θ ′ cosψ ) cos θ
+ k + cosψ cos θ
1
′
= −{θ + k1 sinψ }sin θ T + {k1 cosψ + 1}cosψ cos θ & + {k1 cosψ + 1}sinψ cos θ B
θ ′ + k1 sinψ = 0 ve cosψ = −
1
eşitliğinden D T b1 = 0 bulunur. Benzer şekilde
k1 (t )
D T b2 = 0 olduğu da gösterilebilir.
{
}
Benzer şekilde (Y) eğrisi için Frenet çatısı T , & , B olmak üzere, (Y) eğrisi boyunca
{a1 , a 2 , e3 }
ortonormal vektörlerini bulalım. (Y) eğrisi boyunca Σ düzleminin birim
normal vektör alanı e3 olup e3 ile & arasındaki açı fonksiyonu ψ
ise ψ =
π
2
olup
e3 = B ve
T 1 0 0 T
e3 ΛT = 0 1 0 &
e 3 0 0 1 B
14243
Q
{
}
olup T , e3 , e3 ΛT ortonormal vektör alanı sistemidir. Ayrıca
33
(4.1.9)
k 1i = T , ei , k 2i = & , ei , k 3i = B, ei ,
i = 1,2,3
olmak üzere
T k 11 k 12 k 13 e1
& = k 21 k 22 k 23 e 2
B k 31 k 32 k 33 e3
1
442443
(4.1.10)
P
{
}
Sp{a1 , a 2 } sistemi ile Sp T , e3 ΛT arasındaki dönme açısı θ ise
a1 cos θ sin θ 0 T
a = − sin θ cos θ 0 e ΛT
3
2
e3
0
1 e3
404424
1
443
(4.1.11)
R
(4.1.9) , (4.1.10) ve (4.1.11) eşitlikleri kullanılarak,
a1 e1
P Q R a 2 = e 2
14
4244
3
A2
e3 e3
[][][]
T
T
T
(4.1.12)
elde edilir. b1 = hB −1 a1 , b2 = hB −1 a 2 ve X = hB −1e3 olduğundan (4.1.7) ve (4.1.12)
eşitliklerinden
A = A2 A1T
(4.1.13)
yazabiliriz. (4.1.12) eşitliğinden
a1
e1
d dA2T
e2
a2 =
dt
dt
e3
e3
ve W2 =
dA2T
A2 olmak üzere,
dt
da1
dt
0
θ ′ + k 1 0 a1
da
2 = − θ ′ + k 1
0
0 a 2
dt
0
0
0 e3
de3
44443
dt 144442
W2
(
)
elde edilir.
34
(4.1.14)
Sonuç 4.1.2: θ ′ + k 1 = 0 ise a1 (t ) ve a 2 (t ) vektör alanları (Y) eğrisi boyunca paralel
vektör alanlarıdır.
İspat : Σ ’nın şekil operatörü S Σ = 0 olduğundan E 3 ’ün Riemann koneksiyonu D ile
Σ üzerinde Gauss anlamında kovaryant türev operatörü aynı olur. (4.1.12), (4.1.13) ve
(4.1.14) eşitlikleri kullanılarak
a1 = cos θ T − sin θ &
yazabiliriz.
DT a1 =
(
)
(
)
da1
= − θ ′ + k 1 sin θ T − θ ′ + k 1 cos θ &
dt
θ ′ + k 1 = 0 eşitliğinden DT a1 = 0 bulunur. Benzer şekilde a 2 (t ) vektör alanının da (Y)
eğrisi boyunca sabit vektör alanları olacağını söyleyebiliriz.
dF −1
F ani
dt
Diğer taraftan (4.1.13) eşitliğini kullanarak, (2.2.7) eşitliği ile verilen
hareketinin yuvarlanma kısmı olan S : TY (t ) Σ
→ Sp{e3 } lineer dönüşümünü temsil
eden S =
dA T
A matrisini hesaplayalım.
dt
dA
dAT
S = 2 A1T + A2 1 A1 A2T
dt
dt
(
T
dA
dA
= 2 A2T + A2 1 A1 A2T
dt23
dt
1
W1
(
dA2
dAT
= − A2 2 A2
dt
dt
olduğundan)
dA2
= − A2 W2 olduğundan)
dt
= − A2W2 A2T + A2W1 A2T = A2 (− W2 + W1 )A2T
bulunur. (2.2.12) ve (2.2.14)
[ ]
eşitliklerinden, olmak üzere S = s ij
3x3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = − s 31 ve s 23 = − s 32 olmak üzere
{
= {k cosψ sin θ a , e
(
− (θ ′ + k
)
}
− θ ′ − k sinψ ) e , e }
s12 = k1 cosψ sin θ a1 , e3 + k1 cosψ cos θ a 2 , e3 − θ ′ + k 1 − θ ′ − k1 sinψ e3 , e3
s13
1
1
2
+ k1 cosψ cos θ a 2 , e2
35
1
1
3
2
{
(
)
s 23 = − k1 cosψ sin θ a1 , e1 + k1 cosψ cos θ a 2 , e1 − θ ′ + k 1 − θ ′ − k1 sinψ e3 , e1
}
(4.1.15)
matrisini elde ederiz. Buradan W ∈ Sp{a1 , a 2 , e3 } hareketin yuvarlanma kısmına ait
Darboux vektörü P=(0,0,1) olmak üzere,
(
)
W = k1 cosψ sin θ a1 + k1 cosψ cos θ a 2 − θ ′ + k 1 − θ ′ − k1 sinψ e3 (4.1.16)
olarak elde edilir.
Sonuç 4.1.3: Eğer b1 (t ) , b2 (t ) , a1 (t ) ve a 2 (t ) , sırasıyla, (X) ve (Y) eğrileri boyunca
paralel vektör alanları ve θ = θ = sabit, ψ = 0 için, S 2 nin Σ üzerindeki homotetik
hareketi, (Karakaş, 1982) bölüm 3.2’de tanımlanan hareket denklemleri ile aynı olur.
Ayrıca h=1 olması durumunda, (%omizu, 1977) bölüm 3 de elde edilen hareket
denklemleri elde edilmiş olur.
Teorem 4.1.1:
{b1 , b2 }
ve
{a1 , a 2 }
vektör alanları, sırasıyla, (X) ve (Y) eğrileri
boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir homotetik
hareket olması için gerekli ve yeterli şart θ ′ + k 1 − θ ′ − k1 sinψ = 0 olmasıdır.
Sonuç 4.1.4: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) eğrileri boyunca
birer paralel vektör alanı sistemi ise değme noktalarında b1 = hB −1 a1 , b2 = hB −1 a 2 ve
X = hB −1e3 olacak şekilde tanımlanan S 2 küresi ∑ düzlemi üzerinde F hareketi bir
homotetik harekettir.
Sonuç 4.1.5: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) geodezik eğrileri
boyunca paralel vektör alanları ise θ ve θ hareket boyunca sabit olup θ = θ ‘dir.
Sonuç 4.1.6: S 2 küresi ∑ düzlemi üzerinde, sırasıyla, θ ′ + k1 sinψ = 0 ve θ ′ + k 1 = 0
eşitliklerini sağlayan (X) ve (Y) geodezik olmayan eğrileri boyunca homotetik hareketi
yapar.
36
Sonuç 4.1.7: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) eğrileri boyunca
birer paralel vektör alanı sistemi ve ψ =
π
2
+ kπ , k ∈ Z ise F hareketi sadece kayma
hareketidir.
Diğer taraftan (X) birim hızlı eğri ise
dY
=h
dt
olup (4.1.13) den B = hA2 A1T olarak bulunmuş olur. Ayrıca
dB
dC
X+
=0
dt
dt
ve Y = BX + C eşitliklerinden C matrisi de bulunarak F : S 2
→ ∑ homotetik
hareketi elde edilmiş olur.
Örnek 4.1.1:
Denklemi x1 + x 2 + x3 = 1 olan S2 birim küresi üzerinde,
2
2
2
X (t ) = (sin t , 0 , cos t )
t ∈ [0, π ]
küresel eğrisini göz önüne alalım. (X) eğrisinin x3 = 1 düzlemi üzerinde denklemi,
t2 t2
Y (t ) = , ,1
2 2
olan eğrisi üzerinde bir homotetik hareketini bulalım. (X) eğrisi için,
T = (cos t , 0 , − sin t ) , & = (− sin t ,0 , − cos t ) , B = (0 ,1, 0) , k1 = 1 , k 2 = 0 , ψ = π
ve Y(t) eğrisi için,
T=
1
2
(1,1, 0 ) ,
&=
1
(1, − 1, 0) , B = (0 , 0 ,1) , k 1 = 0 , k 2 = 0 , ψ = π , dY = h = t 2
2 dt
2
bulunur.
dY
dX
=B
dt
dt
eşitliği de göz önüne alınarak θ (t ) = θ = π bulunur. O halde B matrisi,
37
cos t
2
cos t
B(t ) = t 2
2
sin t
bulunur.
−
sin t
2
sin t
−
2
cos t
1
−
2
1
2
0
dB
dC
X+
= 0 ve Y = BX + C eşitliklerini sağlayan C matrisi ve hareketin
dt
dt
denklemi de
cos t
2
cos t
Y (t ) = t 2
2
sin t
sin t
2
t2 2
sin t
−
X (t ) + t 2 2
2
1 − t 2
cos t
1
−
−
2
1
2
0
olarak bulunmuş olur. Bu hareketin yuvarlanma kısmına ait Darboux matrisi ve
Darboux vektörü de şu şekilde olacaktır.
S=
0
0
0
0
1
1
2
2
1
2
1
−
2
0
−
ve W
P
1
1
=
,−
, 0
2
2
(4.1.16) eşitliğinden, ψ = π , k1 = 1 , k 2 = 0 , k 1 = 0 , k 2 = 0 ve θ (t ) = θ = π değerleri
için W ∈ Sp{a1 , a 2 , e3 } vektörü,
W = (0 ,1, 0)
ve (4.1.9), (4.1.10) ve (4.1.11) eşitliklerinden,
a1 = −
2
2
2
2
e1 −
e2 ve a 2 =
e1 −
e2
2
2
2
2
olup
W =
1
2
e1 −
1
2
e2
elde edilir. Bu ise S ile elde ettiğimiz vektörle aynıdır ve θ ′ + k 1 − θ ′ − k1 sinψ = 0 şartı
sağlanır. Dolayısıyla birim küre yüzeyi ∑ düzlemi üzerinde, (X) ve (Y) pol eğrileri
boyunca homotetik olarak hareket eder
38
Şekil 4.1.2
4.2 E3 de Bir Altmanifoldun Düzlem Üzerindeki Hareketi
E 3 3-boyutlu Öklid uzayında herhangi bir altmanifold M ve xo ∈ M noktasındaki
tanjant düzlemi ∑ ve bu düzlemin denklemi x3 = 0 olsun. E 3 deki koordinat sistemi
{x1 , x2 , x3 }
olmak üzere M manifoldunun düzlemle teğet olduğu noktadan başlayan
birim hızlı diferensiyellenebilir eğri x(t ) olsun. x(t ) eğrisi boyunca M in birim normal
vektör alanı ξ olsun. Herhangi bir t 0 anında x0 noktası, M ile ∑ düzleminin değme
noktası olduğundan bu noktalarda ξ 0 = e3 olacaktır. Bundan dolayı değme noktalarında
Bξ = he3 yazılabilir. Bu durumda F homotetik hareketini
F :M
→ ∑
x
→ y = F ( x ) = Bx + C
şeklinde tanımlayabiliriz. Burada B = hA , A ∈ SO(3) ve C matrisleri, elemanları t ye
göre diferensiyellenebilir fonksiyonlar olan matrislerdir.
Diğer taraftan x noktasının yörüngesi de ∑ düzlemi üzerinde bir pol eğrisi olup, x
noktaları M üzerinde bir X(t) (kısalığın hatırı için (X) ) eğrisi üzerindeki noktalar ise,
39
(Y) eğrisi, (X) eğrisinin kaymalı yuvarlanma hareketi sonucunda ∑ düzlemi üzerinde
oluşturduğu eğri olduğu düşünülürse
dY
dX
= B
dt
dt
(4.2.1)
olup eğer (X) birim hızlı eğri ise
dY
=h
dt
olacaktır. Yani hareketli ve sabit uzaydaki pol eğrileri farklı çizilme hızlarına sahiptir.
F, 1-parametreli homotetik hareketi, hareketin her t anında x noktaları ∑ düzlemi ile
değme noktası olacak şekilde verilsin. Yani hareket süresince x ve y noktaları, sırasıyla,
hareketli ve sabit uzayda ani pol noktaları olsunlar. Hareket süresince
{a1 , a 2 }
ortonormal sistemini ∑ sabit uzayı için sabit baz sistemi olarak ele alalım. Hareketli
uzaydaki hareketli baz sistemi olarak {b1 , b2 , ξ } ortonormal vektör sistemini alalım ve
bu sistemi (X) eğrisinin Frenet vektörlerinden ve {T , ξ , ξΛT } ortonormal sisteminden
yararlanarak tanımlayalım. ξ ∈ Sp{T , & , B} için,
ξ = λ0T + λ1 & + λ 2 B
ξ ,ξ = 1 ⇒
(4.2.2)
dξ
, ξ = 0 ⇒ T , ξ = 0 ⇒ λ0 = 0
dt
Şekil 4.2.1
Bu durumda
ξ (t ) = cosψ & + sinψ B
40
(4.2.3)
elde edilir. (4.2.2) eşitliğinden
ξΛT = cosψ &ΛT + sinψ BΛT ⇒ ξΛT = sinψ & − cosψ B
T
ξΛT =
ξ
0
0 T
1
0 sinψ − cosψ &
0 cosψ
sinψ B
144424443
(4.2.4)
Q
olup {T , ξ , ξΛT } ortonormal vektör alanı sistemidir. Ayrıca
k1i = T , ei , k 2i = & , ei , k 3i = B, ei ,
i = 1,2,3
olmak üzere
T k11 k12 k13 e1
& = k
21 k 22 k 23 e2
B k 31 k 32 k 33 e3
1442443
(4.2.5)
P
ve Sp{b1 , b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı θ ise
b1 cos θ sin θ 0 T
b = − sin θ cos θ 0 ξΛT
2
ξ 0
0
1 ξ
144424443
(4.2.6)
R
yazılabilir. (4.2.4) , (4.2.5) ve (4.2.6) eşitlikleri kullanılırsa,
b1 e1
[1
P ] [Q] [R ] b2 = e 2
44244
3
A1
ξ e3
T
T
T
eşitliği elde edilir. Diğer taraftan (4.2.7)’dan
b1
e1
d dA1T
e2
b2 =
dt
dt
e3
ξ
dA1T
ve W1 =
A1 olmak üzere,
dt
41
(4.2.7)
k1 cos θ cosψ
db1
0
θ ′ + k1 sin ψ
dt
+ (k 2 + ψ ′) sin θ b
1
db
k sin θ cosψ
2 = − (θ ′ + k1 sinψ )
0
b
− 1
2
dt
− (k 2 + ψ ′) cos θ ξ
d (ξ ) k cos θ cosψ k sin θ cosψ
1
dt − 1
0
′
− (k 2 + ψ ′) cos θ
2 + ψ ) sin θ
+4(k4
14
444444444
424444444444444
3
W1
(4.2.8)
elde edilir.
Sonuç 4.2.1: θ ′ + k1 sinψ = 0 ise b1 ve b2 vektör alanları (X) eğrisi boyunca
paralel vektör alanlarıdır.
İspat : E 3 ’ün Riemann koneksiyonu D , M
üzerinde Gauss anlamında
kovaryant türev operatörü de D ve M ’ in şekil operatörü S M olsun. Hareketin her t
anında b1 (t ) ve ξ
vektör alanları, b1 = cos θ T + sin θ sinψ & − sin θ cosψ B ve
ξ = cosψ & + sinψ B olduğunu biliyoruz.
D T b1 = DT b1 + S M (T ), b1 ξ
= DT (cos θ T + sin θ sinψ & − sin θ cosψ B)
+ D T (cos ψ & + sin ψ B ), cos θ T + sin θ sin ψ & − sin θ cos ψ B (cos ψ & + sin ψ B )
ψ ′ cosψ sin θ
& − k1 sinψ sin θ T
= −θ ′ sin θ T + k1 cos θ & +
+ θ ′ sinψ cos θ
ψ ′ sinψ sin θ
B + k 2 cosψ sin θ &
+ k 2 sinψ sin θ B −
+ θ ′ cosψ cos θ
− k1 cosψ T − (ψ ′ + k 2 )sinψ & cos θ T + sin θ sinψ &
+
,
(cosψ & + sinψ B )
+ (ψ ′ + k 2 ) cosψ B
− sin θ cosψ B
(ψ ′ + k 2 ) cosψ sin θ
(ψ ′ + k 2 )sinψ sin θ
= −{θ ′ + k1 sinψ }sin θ T +
& +
B
− θ ′ cosψ cos θ
+ (θ ′ sinψ + k1 ) cos θ
+ {− k1 cosψ cos θ − (ψ ′ + k 2 ) sin θ }(cosψ & + sinψ B )
= −{θ ′ + k1 sinψ }sin θ T + {θ ′ + k1 sinψ }sinψ cos θ & − {θ ′ + k1 sinψ }cosψ cos θ B
42
θ ′ + k1 sinψ = 0 olduğundan D T b1 = 0 bulunur. Benzer şekilde D T b2 = 0 olduğu da
gösterilebilir.
{
}
Benzer şekilde (Y) eğrisi için Frenet çatısı T , & , B olmak üzere, (Y) eğrisi boyunca
{a1 , a 2 , e3 }
ortonormal vektörlerini bulalım. (Y) eğrisi boyunca Σ düzleminin birim
normal vektör alanı e3 olup e3 ile & arasındaki açı fonksiyonu ψ
e3 = B ‘dir.
ise ψ =
π
olup
2
(4.1.9), (4.1.10), (4.1.11), (4.1.12), (4.1.13) ve (4.1.14) matrislerini
kullanabiliriz.
Sonuç 4.2.2: θ ′ + k 1 = 0 ise a1 (t ) ve a 2 (t ) vektör alanları (Y) eğrisi boyunca paralel
vektör alanlarıdır.
İspat: Sonuç 4.1.2 nin ispatı ile aynıdır.
Diğer taraftan (4.1.14), (4.2.8) eşitliklerini kullanarak, (2.2.7) eşitliği ile verilen
dF −1
F
dt
→ Sp{e3 } lineer dönüşümünü temsil
ani hareketinin yuvarlanma kısmı olan S : TY (t ) Σ
eden S =
dA T
A matrisini hesaplayalım.
dt
S = A2 (− W2 + W1 )A2T
[ ]
olduğundan S = s ij
3x3
matrisi, s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = − s 31 ve s 23 = − s 32
olmak üzere
k1 cosψ sin θ
θ ′ + k 1 − θ ′
k1 cosψ cos θ
η , e3
s12 =
a1 , e3 +
a 2 , e3 −
′
′
(
)
(
)
−
+
k
cos
+
+
k
sin
ψ
θ
ψ
θ
−
k
sin
ψ
2
2
1
k1 cosψ sin θ
θ ′ + k 1 − θ ′
k1 cosψ cos θ
η , e2
s13 =
a1 , e2 +
a 2 , e2 −
− (ψ ′ + k 2 ) cos θ
+ (ψ ′ + k 2 ) sin θ
− k1 sinψ
k1 cosψ sin θ
θ ′ + k 1 − θ ′
k1 cosψ cos θ
η , e1
s 23 = −
a1 , e1 +
a 2 , e1 −
k
sin
−
ψ
− (ψ ′ + k 2 ) cos θ
+ (ψ ′ + k 2 ) sin θ
1
(4.2.9)
43
ve buradan W ∈ Sp{a1 , a 2 ,η } hareketin yuvarlanma kısmına ait Darboux vektörü,
θ ′ + k 1 − θ ′
k1 cosψ sin θ −
k1 cosψ cos θ +
η
W =
a1 +
a 2 −
′
′
(
)
(
)
+
k
cos
+
k
sin
ψ
θ
ψ
θ
−
sin
k
ψ
2
2
1
(4.2.10)
şeklinde olacaktır.
Sonuç 4.2.3: Eğer b1 (t ) , b2 (t ) , a1 (t ) ve a 2 (t ) , sırasıyla, (X) ve (Y) eğrileri boyunca
paralel vektör alanları ve θ = θ = sabit, ψ = 0 için, M nin Σ üzerindeki homotetik
hareketi, (Karakaş, 1982) bölüm 3.3 de tanımlanan hareket denklemleri ile aynı olur.
Ayrıca h=1 olması durumunda (%omizu, 1977) bölüm 4 de verilen hareket denklemleri
elde edilmiş olur.
Teorem 4.2.1:
{b1 , b2 }
ve
{a1 , a 2 }
vektör alanları, sırasıyla, (X) ve (Y) eğrileri
boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir homotetik
hareket olması için gerekli ve yeterli şart θ ′ + k 1 − θ ′ − k1 sin ψ = 0 olmasıdır.
Sonuç 4.2.4: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) eğrileri boyunca
birer paralel vektör alanı sistemi ise değme noktalarında b1 = hB −1 a1 , b2 = hB −1 a 2 ve
ξ = hB −1e3 olacak şekilde tanımlanan F hareketi bir homotetik harekettir.
Sonuç 4.2.5: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) geodezik eğrileri
boyunca paralel vektör alanları ise θ ve θ hareket boyunca sabittir. Bu durumda M
manifoldu düzlem üzerinde geodezikler boyunca homotetik hareket yapar.
Sonuç 4.2.6: M
manifoldu ∑ düzlemi üzerinde, sırasıyla, θ ′ + k1 sinψ = 0 ve
θ ′ + k 1 = 0 eşitliklerini sağlayan (X) ve (Y) geodezik olmayan eğrileri boyunca kaymalı
yuvarlanma hareketi yapar.
Teorem 4.2.2: F hareketi bir homotetik hareket ve (X)
eğrisi M nin bazı flat
noktalarından geçiyorsa bu noktalarda hareket sadece kaymadan ibarettir. Bu durumda
(4.2.10) ile verilen Darboux vektörü sıfır vektörü olacaktır.
44
İspat: (X) eğrisi boyunca M manifoldunun şekil operatörü S M olsun. Bu durumda
dX dξ
SM
=
dt dt
olup P noktası (X) eğrisi üzerinde olan ve M nin bir flat noktası olsun. P noktasında
dX
S M
dt
= 0
P
(4.2.11)
olacaktır. Diğer taraftan Bξ = he3 eşitliğinde türev alınırsa
dB
dξ dh
=
ξ+B
e3
dt
dt
dt
dA
dξ dh
dh
A + h B −1 Bξ + B
=
e3
dt
dt
dt
dt
dh
dA T
dξ dh
e3 + h
A e3 + hA
=
e3
dt
dt
dt
dt
P flat noktasında,
S (e3 ) = − A
dξ
dt
P
ve (4.2.8) eşitliğinden,
dξ
dt
P
θ cosψ
( )− k− (sin
A(b )
k + ψ ′) cos θ
k1 cos θ cosψ
=
+ (k 2 + ψ ′) sin θ
1
44
42444
3
λ1
A b1
1
p
2 p
2
144
42444
3
λ2
P
P
k1 cos θ cosψ
k1 sin θ cosψ
=
a1 p −
a2
+ (k 2 + ψ ′)sin θ
− (k 2 + ψ ′) cos θ
1
44
42444
3
144
42444
3
λ1
(4.2.11)’dan λ1
P
= 0 ve λ 2
P
λ2
P
p
P
= 0 ve dolayısıyla S=0 bulunur. (2.2.7) eşitliğinden
dX
H
dt
dX
= ϕ (t )
P
dt
dX
+ S
dt P
P
1424
3
=0
dX
H
dt
dX
= ϕ
P
dt
P
olur. O halde M üzerinde ki flat noktalarda hareket sadece kaymadan ibarettir.
45
Sonuç 4.2.7: Bir M manifoldunun düzlem üzerinde 1-parametreli homotetik hareket
yapması için M üzerindeki (X) eğrisinin M nin hiçbir flat noktasından geçmemesi
gerekir.
Sonuç 4.2.8: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) eğrileri boyunca
birer paralel vektör alanı sistemi k 2 = 0 ve ψ =
π
2
+ kπ , k ∈ Z ise F hareketi sadece
kayma hareketidir.
Sonuç 4.2.9: F bir homotetik hareket, (X) ve (Y), sırasıyla, M ve ∑ üzerinde birer
eğrilik çizgisi ise
k 2 = 0 veya ψ =
π
4
+ kπ , k ∈ Z
olur. Özel olarak ψ = 0 ise (X) M manifoldu üzerinde düzlemsel geodezik eğrilik
çizgisidir.
Sonuç 4.2.10: F homotetik hareketi sadece kaymadan ibaret ise (X) M manifoldu
üzerinde düzlemsel asimptotik çizgidir ve θ , θ sabit açıları için
k1
oranı hareket
k1
boyunca sabittir.
Sonuç 4.2.11: M manifoldu bir küre ise bu durumda bölüm 2.1’ de elde edilen tüm
sonuçlar elde edilir.
Diğer taraftan (X) birim hızlı eğri ise
dY
=h
dt
olup (2.1.13) den B = hA2 A1T olarak bulunmuş olur. Ayrıca
dB
dC
X+
=0
dt
dt
46
→ ∑ kaymalı
ve Y = BX + C eşitliklerinden C matrisi de bulunarak F : M
yuvarlanma hareketi elde edilmiş olur.
Örnek 4.2.1:
Denklemi x 2 + (1 − z ) = 1 ile verilen M silindiri üzerinde denklemi 0 ≤ t ≤ π için
2
t t
t
X (t ) = sin
,1 − cos
,
2
2
2
ile
verilen
helis
eğrisinin
denklemi
t2
Y (t ) = , 0 , 0 ile verilen eğri üzerindeki homotetik hareketini bulalım. X(t) eğrisi
2
için,
T=
t ,
t
t
1 t 1
cos
,
, sin
& = − sin
,0, cos
2 2 2
2
2
2
B=
t k = 1 ve k = − 1
1 t
cos
,
−
1
,
sin
1
2
2
2
2 2
2
olup, M silindir yüzeyinin (X) boyunca birim normal vektör alanı
t
t
, 0 , − cos
2
2
ξ (t ) = sin
’dir. ξ (t ) ile N arasındaki ψ açısı için ψ = π olup hareket boyunca sabittir. Y(t)
eğrisi için,
T = (1, 0 , 0) , & = (0,1,0 ) B = (0, 0 , 1) , k 1 = 0 , k 2 = 0 , ψ =
π
2
bulunur.
dY
dX
=B
dt
dt
eşitliği de göz önüne alınarak her θ (t ) = θ =
B(t ) =
π
4
için B matrisi,
t
t
cos
2
2
2
t
t
t
cos
−
2
2
2
t
t sin
0
2
t
47
sin
2
t
sin
2
− t cos
t
t
2
t
2
t
2
,
dY
=h=t
dt
bulunur.
dB
dC
X+
= 0 ve Y = BX + C eşitliklerini sağlayan C matrisi ve hareketin
dt
dt
denklemi ,
Y (t ) =
t
t
cos
2
2
2
t
t
t
cos
−
2
2
2
t
0
t sin
2
t
sin
2
t
sin
2
− t cos
t
t
t
t
sin
−
2
2 2 2
t
t
t
t
sin
X (t ) + −
2
2
2 2
t
t
− t + t cos
2
2
olarak bulunmuş olur. Bu hareketin yuvarlanma kısmına ait Darboux matrisi ve
Darboux vektörü de
0
S = 0
1
2
0
0
1
2
1
−
2
1 ve W
−
2
0
P
1
1
= , − , 0
2
2
olacaktır. (4.2.10) eşitliğinden, ψ = π , k1 = 1 , k 2 = 0 , k 1 = 0 , k 2 = 0 ve θ (t ) = θ = π
değerleri için W ∈ Sp{a1 , a 2 , e3 } vektörü,
2
W = 0, −
, 0
2
ve (4.1.9), (4.1.10) ve (4.1.11) eşitliklerinden,
a1 =
2
2
2
2
e1 +
e2 ve a 2 = −
e1 +
e2
2
2
2
2
olup
W =
1
1
e1 − e 2
2
2
elde edilir. Bu ise S ile elde ettiğimiz vektörle aynıdır ve θ ′ + k 1 − θ ′ − k1 sinψ = 0 şartı
sağlanır. Dolayısıyla silindir yüzeyi ∑ düzlemi üzerinde, (X) ve (Y) pol eğrileri
boyunca homotetik olarak hareket eder
48
Şekil 4.2.2
4.3 E3 de İki Altmanifoldun Birbiri Üzerindeki Hareketi
M ve N, 3-boyutlu Öklid uzayında herhangi 2-boyutlu altmanifold ve xo ∈ M noktası
iki manifoldun değme noktası olsun. M nin N manifoldu ile teğet olduğu noktadan
başlayan birim hızlı diferensiyellenebilir eğri x(t ) ve N üzerinde hareketin her t anında
x(t ) eğrisine değen eğri y (t ) olsun. x(t ) eğrisi boyunca M nin birim normal vektör
alanı ξ ve y (t ) eğrisi boyunca N nin birim normal vektör alanı η olsun. Herhangi bir
t 0 anında x0 noktası, M ile N manifoldunun değme noktası olduğundan bu noktalarda
ξ 0 = εη 0 olacaktır. Bundan dolayı değme noktalarında
Bξ = ε h η
yazılabilir. Burada ε manifoldların yönlendirmelerine bağlı bir işaret değeri olup, ε = 1
ise; M, N nin içinde, ε = −1 ise; M, N nin dışında hareket edecektir. Bu durumda F
homotetik hareketini
F :M
→ &
x
→ y = F ( x ) = Bx + C
şeklinde tanımlayabiliriz. Burada B = hA , A ∈ SO(3) ve C matrisleri, elemanları t ye
göre diferensiyellenebilir fonksiyonlar olan matrislerdir.
49
Diğer taraftan M manifoldu üzerindeki x(t ) eğrisi hareketli pole eğrisi olsun. Buna
karşılık N manifoldu üzerindeki y (t ) eğrisi de hareketli pol eğrisi olacaktır. x(t ) ve
y (t ) eğrilerini kısalığın hatırı için, sırasıyla, (X) ve (Y) ile göstereceğiz. (X) ve (Y)
eğrilerinin değme noktalarında tanjant uzayları çakışık olacağından
dY
dX
= B
dt
dt
(4.3.1)
olup eğer (X) birim hızlı eğri ise
dY
=h
dt
olacaktır. Yani hareketli ve sabit uzaydaki pol eğrileri farklı çizilme hızlarına sahiptir.
Hareket süresince {a1 , a 2 } ortonormal sistemini N üzerindeki (Y) eğrisi boyunca sabit
baz sistemi olarak ele alalım. Hareketli uzaydaki hareketli baz sistemi olarak {b1 , b2 , ξ }
ortonormal vektör sistemini alalım ve bu sistemi (X) eğrisinin Frenet vektörlerinden ve
{T , ξ , ξΛT } ortonormal sisteminden yararlanacak şekilde tanımlayalım. ξ ∈ Sp{T , & , B}
için,
ξ = λ0T + λ1 & + λ 2 B
ξ ,ξ = 1 ⇒
dξ
, ξ = 0 ⇒ T , ξ = 0 ⇒ λ0 = 0
dt
Şekil 4.3.1
50
(4.3.2)
Bu durumda
ξ = cosψ & + sinψ B ve η = cosψ & + sinψ B
(4.3.3)
elde edilir. (4.3.3) eşitliğinden,
ξΛT = cosψ &ΛT + sinψ BΛT ⇒ ξΛT = sinψ & − cosψ B
0
0 T
T 1
ξΛT = 0 sinψ − cosψ &
ξ 0 cosψ
sinψ B
144424443
(4.3.4)
Q
olup {T , ξ , ξΛT } ortonormal vektör alanı sistemidir. Ayrıca
k1i = T , ei , k 2i = & , ei , k 3i = B, ei ,
i = 1,2,3
olmak üzere
T k11 k12 k13 e1
& = k
21 k 22 k 23 e2
B k 31 k 32 k 33 e3
1442443
(4.3.5)
P
ve Sp{b1 , b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı θ ise,
b1 cos θ sin θ 0 T
b = − sin θ cos θ 0 ξΛT
2
εξ 0
0
ε ξ
144424443
(4.3.6)
R
şeklinde yazılabilir. (4.3.4) , (4.3.5) ve (4.3.6) eşitlikleri kullanılırsa,
b1 e1
[1
P ] [Q ] [R ] b2 = e2
44244
3
A1
εξ e3
T
T
T
eşitliği elde edilir. Diğer taraftan (4.3.7)’dan
b1
e1
d dA1T
e2
b2 =
dt
dt
e3
εξ
ve W1 =
dA1T
A1 olmak üzere,
dt
51
(4.3.7)
k cos θ cosψ
db1
θ ′ + k1 sin ψ
ε 1
0
dt
+ (k 2 + ψ ′) sin θ b
1
db
k1 sin θ cosψ
2
= − (θ ′ + k1 sin ψ )
b
0
−ε
2
dt
− (k 2 + ψ ′) cos θ εξ
d (εξ ) k cos θ cosψ k sin θ cosψ
1
dt − ε 1
ε
0
+ (k 2 + ψ ′) sin θ − (k 2 + ψ ′) cos θ
144
44444444444244444444444443
W1
(4.3.8)
elde edilir.
Sonuç 4.3.1: θ ′ + k1 sinψ = 0 ise b1 ve b2 vektör alanları (X) eğrisi boyunca paralel
vektör alanlarıdır
İspat : Teorem 2.2.1 de olduğu gibi gösterilebilir.
{
}
Benzer şekilde (Y) eğrisi için Frenet çatısı T , & , B olmak üzere, (Y) eğrisi boyunca
{a1 , a 2 ,η}
ortonormal vektörlerini bulalım. (Y) eğrisi boyunca N manifoldunun birim
normal vektör alanı η ise η ile & arasındaki açı fonksiyonu ψ için şekil (4.3.3) den
η (t ) = cosψ & + sinψ B yazabiliriz. Dolayısıyla,
T 1
0
0 T
ηΛT = 0 sin ψ − cosψ &
η 0 cosψ
ψ B
144424sin
443
(4.3.9)
Q
{
}
olup T ,η ,ηΛT ortonormal vektör alanı sistemidir. Ayrıca
k 1i = T , ei , k 2i = & , ei , k 3i = B, ei ,
i = 1,2,3
olmak üzere
T k 11 k 12 k 13 e1
& = k 21 k 22 k 23 e 2
B k 31 k 32 k 33 e3
1442443
P
{
}
ve Sp{a1 , a 2 } sistemi ile Sp T ,ηΛT arasındaki dönme açısı θ ise,
52
(4.3.10)
a1 cos θ sin θ 0 T
a = − sin θ cos θ 0 ηΛT
2
η
0
1
η
404424
1
44
3
(4.3.11)
R
şeklinde yazılabilir. (4.3.9) , (4.3.10) ve (4.3.11) eşitlikleri kullanılırsa,
a1 e1
P Q R a 2 = e 2
14
4244
3
A2
η e3
[][][]
T
T
T
(4.3.12)
elde edilir. (4.3.7) ve (4.3.12) eşitlikleri kullanılarak b1 = AT a1 , b2 = AT a 2 ve
ξ = εAT η olacak şekilde A matrisi,
A = A2 A1T
(4.3.13)
olacaktır. (4.3.12) eşitliğinden
a1
e1
d dA2T
e2
a2 =
dt
dt
e3
η
ve W2 =
dA2T
A2 olmak üzere,
dt
0
da
1
dt
da
2 = − θ ′ + k 1 sinψ
dt
dη
dt − k 1 cos θ cosψ
′
sin
+
k
+
ψ
θ
2
(
(
θ ′ + k 1 sinψ
)
)
0
k 1 sin θ cosψ
− k 2 + ψ ′ cos θ
(
)
k 1 cos θ cosψ
+ k 2 + ψ ′ sin θ
a
k 1 sin θ cosψ 1
−
a 2
− k 2 + ψ ′ cos θ
η
0
(
)
(
)
(4.3.14)
elde edilir.
Sonuç 4.3.2: θ ′ + k 1 sinψ = 0 ise a1 ve a 2 vektör alanları (Y) eğrisi boyunca paralel
vektör alanlarıdır.
İspat : Teorem 2.2.1 de olduğu gibi gösterilebilir.
53
S = A2 (− W2 + W1 )A2T , (2.2.7), (4.3.8) ve (4.3.14) eşitliklerini kullanarak,
Diğer taraftan
dF −1
F
dt
ani hareketinin yuvarlanma kısmı olan
[ ]
dönüşümünü temsil eden S = s ij
3x 3
S : TY ( t ) &
→ Sp{η } lineer
matrisi, s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = − s 31
ve s 23 = − s 32 olmak üzere
− k 1 cosψ sin θ
− k 1 cosψ cos θ
θ ′ + k 1 sinψ
+ ψ ′ + k 2 cos θ
− ψ ′ + k 2 sin θ
η , e3
s12 =
a1 , e3 +
a 2 , e3 −
′
−
−
k
sin
θ
ψ
+
k
cos
sin
+
k
cos
cos
ε
ψ
θ
ε
ψ
θ
1
1
1
− ε (ψ ′ + k ) cos θ
+ ε (ψ ′ + k )sin θ
2
2
− k 1 cosψ sin θ
− k 1 cosψ cos θ
θ ′ + k 1 sinψ
+ ψ ′ + k 2 cos θ
− ψ ′ + k 2 sin θ
η , e2
s13 =
a1 , e2 +
a 2 , e2 −
− θ ′ − k1 sinψ
+ ε k1 cosψ sin θ
+ ε k1 cosψ cos θ
− ε (ψ ′ + k ) cos θ
+ ε (ψ ′ + k )sin θ
2
2
(
)
(
s 23
(
)
)
(
)
− k 1 cosψ sin θ
− k 1 cosψ cos θ
θ ′ + k 1 sinψ
+ ψ ′ + k 2 cos θ
− ψ ′ + k 2 sin θ
η , e1
= −
a1 , e1 +
a 2 , e1 −
− θ ′ − k1 sinψ
+ ε k1 cosψ sin θ
+ ε k1 cosψ cos θ
− ε (ψ ′ + k ) cos θ
+ ε (ψ ′ + k ) sin θ
2
2
(4.3.15)
(
)
(
)
ve buradan hareketin yuvarlanma kısmına ait W ∈ Sp{a1 , a 2 ,η } Darboux vektörü,
− k 1 cosψ sin θ + − k 1 cosψ cos θ −
ψ ′ + k 2 cos θ + ψ ′ + k 2 sin θ + θ ′ + k 1 sinψ
W =
,
,−
ε k1 cosψ sin θ − ε k1 cosψ cos θ + − θ ′ − k1 sinψ
ε (ψ ′ + k ) cos θ ε (ψ ′ + k ) sin θ
2
2
(
)
(
)
(4.3.16)
olarak elde edilir.
Teorem 4.3.1:
{b1 , b2 }
ve
{a1 , a 2 }
vektör alanları, sırasıyla, (X) ve (Y) eğrileri
boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir homotetik
hareket olması için gerekli ve yeterli şart θ ′ + k 1 sin ψ − θ ′ − k1 sin ψ = 0 olmasıdır.
54
Sonuç 4.3.3: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) eğrileri boyunca
birer paralel vektör alanı sistemi ise değme noktalarında b1 = hB −1 a1 , b2 = hB −1 a 2 ve
εξ = hB −1η olacak şekilde tanımlanan
M ve N manifoldlarının F hareketi bir
homotetik harekettir.
Sonuç 4.3.4: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) geodezik eğrileri
boyunca paralel vektör alanları ise θ ve θ hareket boyunca sabit olup θ = θ ’dir.
Sonuç 4.3.5: M manifoldu N manifoldu üzerinde, sırasıyla, θ ′ + k1 sinψ = 0 ve
θ ′ + k 1 sinψ = 0 eşitliklerini sağlayan (X) ve (Y) geodezik olmayan eğrileri boyunca
homotetik hareket yapar.
Sonuç 4.3.6: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) düzlemsel
eğrileri boyunca birer paralel vektör alanı sistemi ve ψ = ψ =
π
2
+ kπ , k ∈ Z ise F
hareketi sadece kayma hareketidir.
Teorem 4.3.2: F, manifoldların (X) ve (Y) eğrileri boyunca homotetik hareketi
esnasında, (X) ve (Y) eğrileri boyunca M nin ve N nin şekil operatörleri, sırasıyla, S M
ve S & olsun. Eğer
dX
dY
h −1 BS M
= S&
dt
dt
ise F hareketi sadece bir kayma hareketidir. Bu durumda (4.3.16) ile verilen Darboux
vektörü sıfır vektörü olacaktır.
İspat : (X) ve (Y) eğrileri boyunca,
dX dξ
dY dη
ve S &
SM
=
=
dt dt
dt dt
olup (4.3.8)’dan
55
k1 cos θ cosψ
k1 sin θ cosψ
dεξ
= −ε
b1 + ε
b2
+ (k 2 + ψ ′)sin θ
− (k 2 + ψ ′) cos θ
dt
144424443
14442444
3
u1
u2
b1 = hB −1 a1 , b2 = hB −1 a 2 ve ξ = ε hB −1η olduğundan
dεξ
h −1 B
= u1 a1 + u 2 a 2
dt
(4.3.13) eşitliğinden de,
dη
k 1 cos θ cosψ
− k 1 sin θ cosψ
=−
a1 +
a 2
dt
+ k 2 + ψ ′ sin θ
+ k 2 + ψ ′ cos θ
144424443
144
42444
3
(
)
(
v1
)
v2
dξ dη
yazabiliriz. h −1 B =
ise, u1 = v1 ve u 2 = v 2 elde edilir. Bu eşitlikler (4.3.17)
dt dt
eşitliğinde yerine yazılırsa W = 0 bulunur. Dolayısıyla (2.2.7) eşitliğinden
(t ) ⇒ H (t ) = ϕ (t )
H (t ) = ϕ (t ) + S{
=0
O halde F hareket sadece bir kaymadan ibaret olur.
Sonuç 4.3.7: F bir homotetik hareket ise M ve N manifoldlarının şekil operatörleri
arasında
dX
dY
h −1 BS M
≠ S&
dt
dt
bağıntısı vardır.
Sonuç 4.3.8: Bir M ve N manifoldlarının birbiri üzerinde 1-parametreli homotetik
hareket yapması için M ve N üzerindeki (X) ve (Y) eğrilerinin hiçbiri M nin ve N nin
flat noktalarından geçmemesi gerekir.
Sonuç 4.3.9: Eğer b1 (t ) , b2 (t ) , a1 (t ) ve a 2 (t ) , sırasıyla, (X) ve (Y) eğrileri boyunca
paralel vektör alanları ve θ = θ = sabit, ψ = ψ = 0 için, M nin N üzerindeki homotetik
hareketi, (Karakaş, 1982) bölüm 3.4 de tanımlanan hareket denklemleri ile aynı olur.
Ayrıca h=1 olması durumunda (%omizu, 1977) bölüm 5 de elde edilen hareket
denklemleri elde edilmiş olur.
56
Sonuç 4.3.10:
a) M manifoldu küre ve N manifoldu de bir düzlem alınırsa, 2.1. bölümde
verilen sonuçlar elde edilebilir.
b) M herhangi bir manifold ve N manifoldu de bir düzlem alınırsa, 2.2. bölümde
verilen sonuçlar elde edilebilir.
Diğer taraftan (X) birim hızlı eğri ise
dY
=h
dt
olup (2.1.13) den B = hA2 A1T olarak bulunmuş olur. Ayrıca
dB
dC
X+
=0
dt
dt
→ &
ve Y = BX + C eşitliklerinden C matrisi de bulunarak F : M
kaymalı
yuvarlanma hareketi elde edilmiş olur.
Örnek 4.3.1:
Denklemi φ (u, v) = (sin v sin u, sin v cos u, cos v ) ile verilen M küresi üzerinde denklemi
0≤t ≤π
için
(− x )2 + (− z − 2 )2 = 1
X (t ) = (sin t , 0 , cos t )
olan
(X)
eğrisinin
denklemi
ile verilen N silindiri üzerinde yine denklemi 0 ≤ t ≤ π için
Y (t ) = (sin t , − t , cos t − 2 ) olan eğri üzerindeki F : M
→ & homotetik hareketini
bulalım. X(t) eğrisi için,
T = (cos t , 0 , − sin t ) , & = (− sin t , 0, − cos t ) , B = (0, 1 , 0 ) k1 = 1 ve k 2 = 0
olup, M küre yüzeyinin X (t ) boyunca birim normal vektör alanı ξ (t ) = (sin t , 0 , cos t )
dir. ξ (t ) ile N arasındaki ψ açısı için ψ = π olup hareket boyunca sabittir. Y(t) eğrisi
için,
2
2
2
2
2
2
T =
cos t , −
,−
sin t , & = (− sin t , 0 , − cos t ) , B =
cos t ,
,−
sin t
2
2
2
2
2
2
k1 =
2
2
, k2 = −
,
2
2
dY
=h= 2
dt
ve bulunur. N silindir yüzeyinin Y (t ) boyunca birim normal vektör alanı
η (t ) = (− sin t , 0 , − cos t )
57
η (t ) ile & arasındaki ψ açısı için
ve
ψ = π olup hareket boyunca sabittir.
dY
dX
=B
eşitliği de göz önüne alınarak θ (t ) = θ (t ) = 0 ve ε = −1 için B matrisi,
dt
dt
cos 2 t − 2 sin 2 t
B(t ) =
− cos t
− 1 + 2 cos t sin t
(
bulunur.
)
cos t
1
(1 + 2 )cos t sin t
sin t
− sin t sin t − 2 cos t
2
2
dB
dC
X+
= 0 ve Y = BX + C eşitliklerini sağlayan C matrisi ve hareketin
dt
dt
denklemi,
cos 2 t − 2 sin 2 t
Y (t ) =
− cos t
− 1 + 2 cos t sin t
(
)
(1 + 2 )cos t sin t
(
)
1 + 2 sin t
1
sin t
−t
X (t ) +
2
2
− sin t sin t − 2 cos t
1 + 2 cos t − 2
cos t
(
)
olarak bulunmuş olur. Bu hareketin yuvarlanma kısmına ait Darboux matrisi ve
Darboux vektörü
0
− 2
S=
sin t
2
2
−1−
2
2
sin t
2
0
2
cos t
2
2
2
− 2
cos t
2
0
1+
2
2
2
ve W =
cos t , 1 +
, −
sin t
2
2
2
bulunur. (4.3.16) eşitliğinden, ψ = ψ = π , k1 = 1 , k 2 = 0 , k 1 =
2
2
, k2 = −
,
2
2
ε = −1 ve θ (t ) = θ = 0 değerleri için W ∈ Sp{a1 , a 2 ,η } vektörü,
W =−
2
2
a2
a1 + 1 +
2
2
ve (4.3.9) , (4.3.10) ve (4.3.11) eşitliklerinden,
a1 =
2
2
2
2
2
2
cos t e1 −
e2 −
sin t e3 ve a 2 =
cos t e1 +
e2 −
sin t e3
2
2
2
2
2
2
olup
W=
2
2
2
e2 −
cos t e1 + 1 +
sin t e3
2
2
2
58
elde edilir. Bu ise S ile elde ettiğimiz vektörle aynıdır ve θ ′ + k 1 sin ψ − θ ′ − k1 sin ψ = 0
şartı sağlanır. Dolayısıyla küre yüzeyi silindir üzerinde, (X) ve (Y) pol eğrileri boyunca
homotetik olarak hareket eder.
Şekil 4.3.2
Örnek 4.3.2:
Denklemi φ (u , v) = (sin v sin u , sin v cos u , cos v − 1) ile verilen M küresi üzerinde
denklemi 0 ≤ t ≤ π
için X (t ) = (sin t , 0 , cos t − 1) olan (X) eğrisinin, denklemi
x 2 + ( z + 2 ) = 4 ile verilen N silindiri üzerinde yine denklemi 0 ≤ t ≤ π
2
için
Y (t ) = (2 sin t , − t , 2 cos t − 2 ) olan eğri üzerindeki F : M
→ & homotetik hareketini
bulalım. X(t) eğrisi için,
T = (cos t , 0 , − sin t ) , & = (− sin t , 0, − cos t ) , B = (0, 1 , 0 ) k1 = 1 ve k 2 = 0
olup, M kürenin X (t ) boyunca birim normal vektör alanı
ξ (t ) = (sin t , 0 , cos t )
’dir. ξ (t ) ile N arasındaki ψ açısı için ψ = π olup hareket boyunca sabittir. Y(t)
eğrisi için,
2 5
5
− 5 −2 5
2 5 − 5
T =
cos t ,
,
sin t , & = (− sin t , 0 , − cos t ) , B =
cos t ,
,
sin t
5
5
5
5
5
5
59
k1 =
2 5
5
, k2 = −
,
5
5
dY
=h= 5
dt
ve bulunur. N silindir manifoldunun Y (t ) boyunca birim normal vektör alanı
η (t ) = (sin t , 0 , cos t )
’dir. η (t ) ile & arasındaki ψ açısı için ψ = π olup hareket boyunca sabittir.
dY
dX
=B
dt
dt
eşitliği de göz önüne alınarak θ (t ) = θ (t ) = 0 ve ε = +1 için B matrisi,
(
)
2 cos 2 t + 5 sin 2 t cos t
5 − 2 cos t sin t
B(t ) =
− cos t
2
sin t
5 − 2 cos t sin t − sin t 2 sin 2 t + 5 cos 2 t
(
bulunur.
)
dB
dC
X+
= 0 ve Y = BX + C eşitliklerini sağlayan C matrisi ve hareketin
dt
dt
denklemi,
2 cos t + 5 sin t cos t
5 − 2 cos t sin t
Y (t ) =
− cos t
2
sin t
X
(
t
)
+
5 − 2 cos t sin t − sin t 2 sin 2 t + 5 cos 2 t
2
(
(
2
)
)
5 −2
sin 2t + 2 − 5 sin t
2
sin t − t
5 −2
(cos 2t + 1) + 2 − 5 cos t
2
(
)
(
)
olarak bulunmuş olur. Bu hareketin yuvarlanma kısmına ait Darboux matrisi ve
Darboux vektörü de, sırasıyla,
0
5
S=
sin t
5
2 5
− 1 +
5
−
5
sin t
5
0
− 5
cos t
5
2 5
5
5
cos t
5
0
1−
− 5
2 5
5
ve W =
cos t , 1 −
,
sin t
5
5
5
bulunur. (4.3.16) eşitliğinden, ψ = ψ = π , k1 = 1 , k 2 = 0 , k 1 =
ε = 1 ve θ (t ) = θ = 0 değerleri için W ∈ Sp{a1 , a 2 ,η } vektörü,
W =−
2 5
5
a1 +
− 1 a 2
5
5
ve (4.3.9) , (4.3.10) ve (4.3.11) eşitliklerinden,
60
2 5
5
, k2 = −
,
5
5
a1 =
2 5
5
2 5
2 5
5
2 5
cos t e1 −
e2 −
cos t e1 +
e2 −
sin t e3 ve a 2 =
sin t e3
5
5
5
5
5
5
olup
W =−
2 5
5
5
cos t e1 +
− 1 e2 +
sin t e3
5
5
5
elde edilir. Bu ise S ile elde ettiğimiz vektörle aynıdır ve θ ′ + k 1 sin ψ − θ ′ − k1 sin ψ = 0
şartı sağlanır. Dolayısıyla küre yüzeyi silindir içinde, (X) ve (Y) pol eğrileri boyunca
homotetik olarak hareket eder.
Şekil 4.3.3
61
5. E 13 DE ALTMA%İFOLDLARI% HOMOTETİK
HAREKETİ
Bu bölümde E 13 uzayında önce hiperbolik kürenin düzlem üzerinde, sonra bir
altmanifoldun diğer bir düzlem üzerinde, daha sonra bir altmanifoldun başka bir
altmanifold üzerindeki homotetik hareketi incelenecektir.
5.1. E31 de Hiperbolik Kürenin Düzlem Üzerindeki Hareketi
E13 uzayında M=(0,0,0) merkezli küre H 02 ve X o = (0,0,1) ∈ H 02 noktasındaki teğet
düzlemi ∑ olsun. E13 deki koordinat sistemi
{x1 , x2 , x3 }
olmak üzere H 02 ve ∑
düzleminin denklemleri, sırasıyla, x1 + x 2 − x3 = −1 ve x3 = 1 dir. Kürenin düzlemle
2
2
2
teğet olduğu noktadan başlayan diferensiyellenebilir küresel spacelike eğri üzerindeki
bir nokta x(t ) olsun. H 02 küresinin ∑ düzlemi üzerindeki homotetik hareketi boyunca
∑ düzlemi, değme noktalarında H 02 nin teğet düzlemi olacağından Bx = he3 alalım.
Bu durumda F homotetik hareketini
F : H 02
→ ∑
x
→ y = F ( x ) = Bx + C
şeklinde tanımlayabiliriz. Burada B = hA , A ∈ SO1 (3) ve C matrisleri, elemanları t ye
göre diferensiyellenebilir fonksiyonlar olan matrislerdir.
Diğer taraftan x(t) noktasının yörüngesi de ∑ düzlemi üzerinde bir pol eğrisi olup, x(t)
noktaları küre üzerinde bir X(t) (kısalığın hatırı için (X) eğrisi) üzerindeki noktalar ise,
(X) eğrisinin kaymalı yuvarlanma hareketi sonucunda ∑ düzlemi üzerinde oluşturduğu
eğri (Y) olduğu düşünülürse
dY
dX
= B
dt
dt
olup eğer (X) birim hızlı eğri ise
62
(5.1.1)
dY
=h
dt
olacaktır. Yani hareketli ve sabit uzaydaki pol eğrileri farklı çizilme hızlarına sahiptir.
Sonuç 5.1.1: H 02 nin ∑ düzlemi üzerinde (X) ve (Y) pol eğrileri boyunca kaymalı
yuvarlanma hareketinde (X) ve (Y) pol eğrilerinin karakterleri aynıdır.
İspat: (X) eğrisi H 02 üzerinde birim hızlı eğri ve (Y) pol eğrisinin teğet vektör alanı T
olsun. Bu durumda (5.1.1) den
dY
= hAT ⇒
dt
h −1
dY
= AT ⇒ T = AT
dt
ve
T , T = AT , AT = (εAT ) ( AT ) = T T AT εAT = T T T = T , T
T
elde edilir. O halde (X) ve (Y) pol eğrilerinin karakterleri aynıdır.
H 02 üzerinde (X) hareketli pol eğrisi üzerinde b1 , b2 ve (Y) sabit pol eğrisi üzerinde
tanımlayacağımız a1 , a 2 ortonormal vektör alanları için hareketi
b1 = hB −1 a1 ve b2 = hB −1 a 2
olacak şekilde tanımlayalım. Bu durumda (X) eğrisi boyunca {b1 ,b2 } sistemi H 02 nin
teğet düzlemleri için ortonormal baz olup {b1 , b2 , X } hareketli uzayın baz sistemi ve
buna karşılık, sabit uzayda da (Y) sabit pol eğrisi boyunca {a1 , a 2 , e3 } sabit baz sistemi
olacaktır. Dolayısıyla, sabit uzayda F ( x) = y
değme noktalarının ve ani pol
noktalarının geometrik yeri olacak şekilde, H 02 nin Σ düzlemi üzerinde (X) eğrisi
boyunca bir F homotetik hareketi vardır.
F
hareketinin tekliğini gösterelim. F1 ve F2 kaymalı yuvarlanmaları için
Β1 ( X (t )) = he3 ve Β 2 ( X (t )) = he3 olmak üzere,
Y (t ) = F1 ( X (t )) = B1 ( X (t )) + C1 ve Y (t ) = F2 ( X (t )) = B2 ( X (t )) + C 2
şeklinde tanımlı olacak şekilde var olsun. Bu iki eşitliği taraf tarafa çıkarırsak
(Β 2 − B1 )( X (t )) = (−h + h)e3
⇒ B2 − B1 = 0 ⇒ B2 = B1
63
elde ederiz. O halde B matrisi tektir.
(F1 − F2 )( X (t )) = C1 − C 2 = 0
eşitliğinden de C matrisinin tek olacağını söyleriz. Böylece F tektir.
Sırasıyla, (X) ve (Y) pol eğrileri boyunca {b1 , b2 , X } ve {a1 , a 2 , e3 } hareketli ve sabit
baz sistemlerini bulalım. (3.4.2) ve (3.4.3) eşitliklerinden,
T ,T = 1 ,
&, & = ε ,
B, B = −ε olmak üzere X ∈ Sp{& , B} ve λ , µ t ye göre diferensiyellenebilir
fonksiyonlar olmak üzere,
X (t ) = λ & + µ B
(5.1.2)
elde edilir. (X) spacelike eğrisinin Frenet vektörleri için,
T ,T = 1 ,
&, & = ε ,
B, B = −ε ve λ2 − µ 2 = −ε olmak üzere,
T ′ = k1 & , & ′ = − ε k1T + k 2 B , B ′ = k 2 &
(5.1.3)
eşitliklerini yazabiliriz (Yaylı, 2000).
Önerme 5.1.1: H 02 üzerindeki bir (X) spacelike eğrisi için, k1 ve k 2 eğrilikler olmak
üzere 1 + ε λ k1 = 0 , λ ′ + µ k 2 = 0 , µ ′ + λ k 2 = 0 , λλ ′ − µµ ′ = 0 ve µ ′λ − µλ ′ = ε k 2
bağıntıları vardır.
İspat: (5.1.3) eşitliklerinden
dX
= − ε λ k1 T + (λ ′ + µ k 2 ) & + ( µ ′ + λ k 2 ) B
dt
yazabiliriz. Buradan (X) yay parametreli bir eğri olduğundan 1 + ε λ k1 = 0 ,
λ′ + µ k2 = 0
ve
µ′ + λ k2 = 0
elde
edilir.
Diğer
taraftan
X , X = −1
ve
dX (t )
, X (t ) = 0 eşitliklerinden,
dt
λλ ′ − µµ ′ = 0
sonucu elde edilir. Ayrıca λ ′ = − µ k 2 ve µ ′ = −λ k 2 olduğundan µ ′λ − µλ ′ = ε k 2
bulunur.
64
i) (X) pol eğrisinin asli normal vektör alanı timelike olsun.
Bu durumda &ΛB = T , TΛB = & ve TΛ& = B olmak üzere (5.1.2) eşitliğinin her iki
tarafını T ile vektörel olarak çarparsak,
XΛ T = − µ & − λ B
(5.1.4)
yazılabilir. Böylece {T , X , XΛT } ortonormal vektör alanı sistemi elde edilmiş olur.
(5.1.2), ve (5.1.4) eşitliklerinden,
T 0 1 0 B
XΛ T = − λ 0 − µ T
X µ 0 λ &
1442443
(5.1.5)
Q
(3.2.1) eşitliğinden,
B k 31 k 32 k 33 e1
T = k
11 k12 k13 e2
& k 21 k 22 k 23 − e3
1442443
(5.1.6)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , XΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
b1 cos θ sin θ 0 T
b = − sin θ cos θ 0 XΛT
2
X 0
0
1 X
14442444
3
(5.1.7)
R
eşitliği vardır. (5.1.5) , (5.1.6) ve (5.1.7) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] b2 = e2
442443
A1
X − e3
−1
−1
−1
(5.1.8)
elde edilir. Diğer taraftan (5.1.8) eşitliği ve ε = −1 için Önerme 5.1.1 kullanılarak,
b1
e1
d dA −1
e2
b2 =
dt
dt
− e3
X
ve W1 =
dA1−1
A1 olmak üzere (5.1.8) eşitliği de kullanılırsa,
dt
65
db1
dt
µk1 + θ ′
λk1 cos θ b1
0
db
2
= − µk1 − θ ′
0
− λk1 sin θ b2
dt
λk1 cos θ − λk1 sin θ
X
0
dX 1
444444
424444444
3
dt
W1
{
(5.1.9)
}
elde edilir. Benzer şekilde (Y) spacelike eğrisi için Frenet çatısı T , & , B olmak üzere,
(Y) eğrisi boyunca
{a1 , a 2 , e3 }
ortonormal vektörlerini bulalım. (Y) eğrisi boyunca Σ
düzleminin birim normal vektör alanı e3 olup e3 timelike vektörü ile & dik
olacağından & spacelike ve bundan dolayı da B timelike vektör olacaktır. Böylece
düzlemsel (Y) spacelike eğrisi için T ′ = k 1 & , & ′ = − k 1 T olacaktır. O halde e3 = B ve
e3 ΛT = − & alınarak,
T 0 1 0 &
e3 ΛT = − 1 0 0 T
e3 0 0 1 B
14243
(5.1.10)
Q
{
olup T , e3 , e3 ΛT
} ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1)
eşitliğinden,
& k 21 k 22 k 23 e1
T = k 11 k 12 k 13 e2
B k 31 k 32 k 33 − e3
1442443
(5.1.11)
P
{
}
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , e3 ΛT arasındaki dönme açısı spacelike dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cos θ sin θ 0 T
a = − sin θ cos θ 0 e ΛT
3
2
e3
0
1 e3
1404424
44
3
(5.1.12)
R
ve (5.1.10), (5.1.11) ve (5.1.12) eşitlikleri kullanılırsa,
a1 e1
P Q R a 2 = e 2
144244
3
A2
e3 − e3
[] [] []
−1
−1
−1
66
(5.1.13)
elde edilir. b1 = hB −1 a1 , b2 = hB −1 a 2 ve X = hB −1e3 olduğundan (5.1.8) ve (5.1.13)
eşitliklerinden,
A = A2 A1−1
(5.1.14)
yazabiliriz. (5.1.10) ve (5.1.12) eşitliğinden
a1
e1
d dA2−1
e2
a 2 =
dt
dt
− e3
e3
ve W2 =
dA2−1
A2 olmak üzere,
dt
da1
dt
θ ′ − k 1 0 a1
da 0
2
= − θ ′ + k 1
0
0 a 2
dt
0
0 e3
de3 0
1
4
4
4
4
2
4
4
4
4
3
dt
W2
(5.1.15)
elde edilir.
Sonuç 5.1.2: a1 (t ) ve a 2 (t ) vektör alanlarının (Y) spacelike eğrisi boyunca Σ ’nın
koneksiyonuna göre paralel vektör alanları olması için gerek ve yeter şart θ ′ − k 1 = 0
olmasıdır.
İspat : Σ ’nın şekil operatörü S Σ = 0 olduğundan E 3 ’ün Riemann koneksiyonu ∇ ile
Σ üzerinde Gauss anlamında kovaryant türev operatörü aynı olur. (5.1.10) ve (5.1.12)
eşitlikleri kullanılarak
a1 = cos θ T − sin θ &
yazabiliriz.
∇ T a1 =
(
)
(
)
da1
= k ′1 − θ ′ sin θ T + k ′1 − θ ′ cos θ &
dt
eşitliğinden θ ′ − k 1 = 0 bulunur. O halde ∇ T a1 = 0 olacaktır. Benzer şekilde ∇ T a 2 = 0
olacağını göstebiliriz.
67
Diğer taraftan (5.1.14) eşitliğini kullanarak, (3.5.7) eşitliği ile verilen
dF −1
F ani
dt
hareketinin yuvarlanma kısmı olan S : TY (t ) Σ
→ Sp{e3 } lineer dönüşümünü temsil
eden S =
dA −1
A matrisini hesaplayalım.
dt
dA
dA −1
S = 2 A1−1 + A2 1 A1 A2−1
dt
dt
(
dA2
dA −1
= − A2 2 A2 olduğundan)
dt
dt
−1
dA
dA
= 2 A2−1 + A2 1 A1 A2−1
dt24
dt
1
4
3
W1
dA2
= − A2 W2 olduğundan)
dt
(
= − A2W2 A2−1 + A2W1 A2−1
ve buradan da
S = A2 (− W2 + W1 )A2−1
[ ]
bulunur. (5.1.9) ve (5.1.15) eşitlikleri yardımıyla S = s ij
3x 3
(5.1.16)
matrisi, s11 = s 22 = s 33 = 0 ,
s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
{
(
) }
= {λk sin θ a , e + λk cos θ a , e + (θ ′ + µk − θ ′ + k ) e , e }
= −{λk sin θ a , e + λk cos θ a , e + (θ ′ + µk − θ ′ + k ) e , e }
s12 = λk1 sin θ a1 , e3 + λk1 cos θ a 2 , e3 + θ ′ + µk1 − θ ′ + k 1 e3 , e3
s13
s 23
1
1
1
2
1
1
1
2
1
2
2
1
1
1
1
3
1
2
3
1
(5.1.17)
dolayısıyla P değme noktalarında W Darboux vektörü,
W
P
{
(
) }
= λk1 sin θ a1 + λk1 cos θ a 2 + θ ′ + µk1 − θ ′ + k 1 e3
P
(5.1.18)
şeklinde olacaktır.
ii) (X) pol eğrisinin asli normal vektör alanı spacelike olsun.
Bu durumda (5.1.2) ve (5.1.4) eşitliklerinden,
T 0 1 0 &
XΛ T = − µ 0 − λ T
X λ 0 µ B
1442443
Q
68
(5.1.19)
(3.2.1) eşitliğinden,
& k 21 k 22 k 23 e1
T = k
11 k12 k13 e2
B k 31 k 32 k 33 − e3
1442443
(5.1.20)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , XΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) olmak üzere, (5.1.7) ,
(5.1.19) ve (5.1.20) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] b2 = e2
442443
A1
X e3
−1
−1
−1
(5.1.21)
elde edilir. Diğer taraftan, (5.1.21) eşitliği ve ε = 1 için Önerme 5.1.1 kullanılarak,
b1
e1
d dA −1
e2
b2 =
dt
dt
e3
X
dA1−1
ve W1 =
A1 olmak üzere (5.1.21) eşitliği de kullanılırsa,
dt
db1
dt
θ ′ − µ k1 − λ k1 cos θ b1
0
db
2
= − θ ′ + µ k1
λ k1 sin θ b2
0
dt
X
0
− λ k1 cos θ λ k1 sin θ
dX 1
444444424444444
3
dt
W1
elde edilir.
(5.1.22)
& , & = − B, B = ε olmak üzere, (5.1.9) ve (5.1.22) eşitliklerini göz
önünde bulundurarak şu sonucu verebiliriz.
Sonuç 5.1.3: θ ′ − εµ k1 = 0 ise b1 ve b2 vektör alanları (X) spacelike eğrisi boyunca
paralel vektör alanları olacaktır.
İspat : E13 ’ün Riemann koneksiyonu ∇ , H 02 üzerinde Gauss anlamında kovaryant
türev operatörü de ∇ ve H 02 nin şekil operatörü S H 2 olsun. Hareketin her t anında
0
69
b1 (t ) ve X(t) vektör alanları (5.1.2), (5.1.5) , (5.1.7) ve (5.1.19)
eşitliklerinden
b1 = cos θ T − µ sin θ & − λ sin θ B ve X (t ) = λ & + µ B olduğunu biliyoruz.
∇ T b1 = ∇ T b1 + S H 2 (T ), b1 X
0
= ∇ T (cos θ T − µ sin θ & − λ sin θ B)
+ − T , cos θ T − µ sin θ & − λ sin θ B (λ & + µ B )
= −θ ′ sin θ T + k1 cos θ & − (µ ′ sin θ + θ ′µ cos θ ) & − µ k1 sin θ T
− µ k 2 sin θ B − (λ ′ sin θ + θ ′λ cos θ ) B − k 2 λ sin θ & − λ cos θ & − µ cos θ B
(k − θ ′µ ) cos θ
= −{ k1 µ + θ ′}sin θ T + 1
& − {θ ′λ cos θ + (λ ′ + µk 2 )sin θ }B
− (µ ′ + λk 2 ) sin θ
− λ cos θ & − µ cos θ B
= −{ k1 µ + θ ′}sin θ T + (k1 − θ ′µ − λ ) cos θ & − (θ ′λ + µ ) cos θ B
F homotetik hareket olduğundan θ ′ = − µ k1 ve Önerme 5.1.1 ‘den λ = 1 / k1 olup bu
eşitlikler yukarda yerlerine yazılırsa ∇ T b1 = 0 bulunur. Benzer şekilde, ∇ T b2 = 0
olduğu da gösterilebilir.
Benzer şekilde, (Y) spacelike eğrisi için (5.1.10), (5.1.11), (5.1.12), (5.1.13) ve (5.1.15)
eşitliklerini kullanabiliriz. Bu durumda (5.1.15), (5.1.16) ve (5.1.22) eşitliklerinden
[ ]
S = s ij
3x 3
matrisi, s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere,
{
(
)
}
= −{λk sin θ a , e + λk cos θ a , e − (θ ′ − µk − θ ′ + k ) e , e }
= {λk sin θ a , e + λk cos θ a , e − (θ ′ − µk − θ ′ + k ) e , e }
s12 = − λk1 sin θ a1 , e3 + λk1 cos θ a 2 , e3 − θ ′ − µk1 − θ ′ + k 1 e3 , e3
s13
s 23
1
1
1
1
2
1
1
1
2
2
2
1
1
1
1
1
3
3
2
1
(5.1.23)
dolayısıyla P değme noktalarında W Darboux vektörü
W
P
{
(
) }
= − λk1 sin θ a1 − λk1 cos θ a 2 + θ ′ − µk1 − θ ′ + k 1 e3
(5.1.24)
P
şeklinde olacaktır. (5.1.18) ve (5.1.24) eşitliklerini genelleştirecek olursak,
W
P
{
(
) }
= − ελ k1 sin θ a1 − ελ k1 cos θ a 2 + θ ′ − εµk1 − θ ′ + k 1 e3
olacaktır.
70
P
(5.1.25)
Teorem 5.1.1: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike
eğrileri boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir
homotetik hareket olması için gerekli ve yeterli şart θ ′ − εµk1 − θ ′ + k 1 = 0 olmasıdır.
Sonuç 5.1.4: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) spacelike eğrileri
boyunca paralel vektör alanları iseler, değme noktalarında b1 = hB −1 a1 , b2 = hB −1 a 2 ve
X = hB −1e3 olacak şekilde tanımlanan H 02 timelike kürenin Σ timelike normalli
düzlemi üzerinde F hareketi bir homotetik harekettir.
Sonuç 5.1.5: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) spacelike geodezik
eğrileri boyunca paralel vektör alanları ise θ
ve θ hareket boyunca sabit olup
θ = θ ’dir.
Sonuç 5.1.6: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) düzlemsel
spacelike eğrileri boyunca birer paralel vektör alanı sistemi ve λ = 0 ise F hareketi
sadece kayma hareketidir.
İspat: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike eğrileri
boyunca birer paralel vektör alanı ise
θ ′ − εµk1 − θ ′ + k 1 = 0
olur. (X) ve (Y) düzlemsel eğriler ve λ = 0 ise (5.1.25)’den P değme noktalarında,
W
P
= 0 olacaktır. Dolayısıyla S=0 ve (3.5.7) eşitliğinden hareket sadece kaymadan
ibaret olur.
Sonuç 5.1.7: F bir homotetik hareket, (X) ve (Y) spacelike eğrileri, sırasıyla, H 02 ve Σ
spacelike yüzeyleri üzerinde birer eğrilik çizgisi ve λ , k1 , k 1 ayrı ayrı sabit ise
θ ′ − θ ′ = k 1 − εµk1 = sabittir. Özel olarak µ = 0 ise, (X) spacelike geodezik eğrilik
çizgisidir.
71
Sonuç 5.1.8: F homotetik hareketi boyunca, W Darboux vektörü her zaman spacelike
olacaktır.
Sonuç 5.1.9: F bir homotetik hareket ve (X), H 02 üzerinde bir geodezik θ ′ − θ ′ = k 1 dir.
Özel olarak θ ve θ sabit ise (Y) bir doğrudur.
Sonuç 5.1.10: (X), H 02 üzerinde asimptotik çizgi θ ve θ sabit olsun. Bu durumda F
homotetik hareketi sadece kaymadan ibaret ise k 1 − εk1 = 0 olur.
iii) (X) pol eğrisinin asli normal vektör alanı lightlike olsun.
Sırasıyla, (X) ve (Y) pol eğrileri boyunca {b1 , b2 , X } ve {a1 , a 2 , e3 } hareketli ve sabit
baz sistemlerini bulalım. (3.4.7) eşitliklerinden,
T , & = T , B = 0 ve
T ,T = 1 ,
&, & = 0 ,
B, B = 0
& , B = 1 olmak üzere (X) eğrisi için Frenet formülleri şu
şekilde olacaktır.
T ′ = k1 & , & ′ = k 2 & , B ′ = −k1T − k 2 B
(5.1.26)
Bu durumda X ∈ Sp{& , B} ve λ , µ t ye göre diferensiyellenebilir fonksiyonlar olmak
üzere,
X (t ) = λ & + µ B , µ ≠ 0
(5.1.27)
elde edilir.
Önerme 5.1.2: E13 uzayındaki lightlike asli normale sahip (X) spacelike eğrisi için
k1 = 0 veya k1 = 1 dir. Eğer k1 = 0 ise eğri T (t ) doğrultusunda bir doğrudur. Bu
durumda (X) eğrisi için normal düzlem yoktur (Petrovič-Torgašev and Šučurovič
2000).
Önerme 5.1.3: H 02 birim küresi üzerindeki bir lightlike asli normale sahip (X)
spacelike eğrisi için k1 = 1 , k 2 = 0 eğrilikler ve λµ = sbt bağıntıları vardır.
İspat: (5.1.27) eşitliğinden,
72
dX
= − µ k1 T + (λ ′ + λ k 2 ) & + ( µ ′ − µ k 2 ) B
dt
yazabiliriz. Buradan (X)
λ′ + λ k2 = 0
ve
yay parametreli bir eğri olduğundan 1 + µ k1 = 0 ,
µ ′ − µk 2 = 0
elde
edilir.
Diğer
taraftan
X , X = −1
ve
dX (t )
, X (t ) = 0 eşitlikleri ve Önerme 5.1.2 den, k1 = 1 , k 2 = 0 ve λµ = − 1 2
dt
bulunur. Ayrıca λ = 1 2 ve µ = −1 dir.
BΛT = ε 1 & ve &ΛT = ε 2 B olmak üzere (5.1.27) eşitliğinin her iki tarafını T ile
vektörel olarak çarparsak, XΛT = −ε 1 & +
ε2
2
B ve buradan da, XΛT spacelike
olduğundan ε 1ε 2 = −1 olacaktır. O halde
X 1 2 0 − 1 &
T = 0 1
0 T
XΛT − ε 1 0 ε 2 2 B
1442443
(5.1.28)
Q
Burada Q matrisini Lorentz anlamında ortogonal yapan ε 1 ve ε 2 değerleri bulunamaz.
Dolayısıyla şu sonucu verebiliriz.
Sonuç 5.1.11: F homotetik hareket olacak şekilde H 02 üzerinde lightlike asli normale
sahip (X) spacelike pol eğrisi yoktur.
iv) (X) pol eğrisinin asli normal vektörü spacelike (veya timelike) ve (Y) pol
eğrisinin asli normal vektörü lightlike olsun.
Bu durumda (X) küresel eğrisi için (i) de verilen Önerme ve Teoremler geçerlidir. Fakat
(Y) eğrisi boyunca, Σ düzleminin birim normal vektör alanı e3 olup, e3 timelike
vektörü ile & lightlike vektörü dik olmayacağından, bu durum için de bir hareket
oluşturulamaz.
Sonuç 5.1.12: F homotetik hareket olacak şekilde Σ üzerinde lightlike asli normale
sahip (Y) spacelike pol eğrisi yoktur.
73
Diğer taraftan sadece (i) ve (ii) durumları için hareket denklemi oluşturabiliriz. (X)
birim hızlı eğri ise
dY
=h
dt
olup (5.1.14) den B = hA2 A1−1 olarak bulunmuş olur. Ayrıca
dB
dC
X+
=0
dt
dt
ve Y = BX + C eşitliklerinden C matrisi de bulunarak F homotetik hareketi elde edilmiş
olur.
Örnek 5.1.1:
Denklemi x1 + x 2 − x3 = −1 olan H 02 birim küresi üzerinde,
2
2
2
2
2
X (t ) =
sinh t ,
sinh t , cosh t
2
2
t ∈ [0, π ]
küresel eğrisini göz önüne alalım. (X) eğrisinin x3 = 1 düzlemi üzerinde denklemi,
t2 t2
Y (t ) = , ,1
2 2
olan eğrisi üzerinde bir kaymalı yuvarlanma hareketini bulalım. (X) eğrisi için,
2
2
T =
cosh t ,
cosh t , sinh t
2
2
2
2
,& =
2 sinh t , 2 sinh t , cosh t
,
2 2
B = −
,
, 0
2
2
k 1 = 1 , k 2 = 0 , λ = 1 , µ = 0 , ε = −1
ve Y(t) eğrisi için,
T=
1
2
(1,1, 0) ,
&=
1
2
(1, − 1, 0) ,
B = (0 , 0 ,1) , k 1 = 0 , k 2 = 0 ,
dY
=h=t 2
dt
ve bulunur. T = AT eşitliği de göz önüne alınarak θ (t ) = θ (t ) = 0 bulunur. O halde B
matrisi,
74
1
1
sinh t
2 (1 + cosh t ) 2 (− 1 + cosh t ) −
2
1
1
B(t ) = t 2 (− 1 + cosh t )
(1 + cosh t ) − sinh t
2
2
2
sinh t
sinh t
−
cosh t
−
2
2
bulunur.
dB
dC
X+
= 0 ve Y = BX + C
dt
dt
eşitliklerini sağlayan C matrisi de,
t2 2
C = t2 2
1 − t 2
olacaktır. Buradan hareketin denklemi
1
1
sinh t
2 (1 + cosh t ) 2 (− 1 + cosh t ) −
2
t2 2
1
1
Y (t ) = t 2 (− 1 + cosh t )
(1 + cosh t ) − sinh t X (t ) + t 2 2
2
2
2
− t 2
sinh t
sinh t
cosh t
−
−
2
2
olarak bulunmuş olur. Bu hareketin yuvarlanma kısmına ait Darboux matrisi ve
Darboux vektörü
0
S= 0
1
−
2
0
−
1
2
1
−
2
0
−
0
1
2
(
ve W = 1
2 , −1
2, 0
)
bulunur. (5.1.25) eşitliğinden k1 = 1 , k 2 = 0 , λ = 1 , µ = 0 , ε = −1 , k 1 = 0 , k 2 = 0 ve
θ (t ) = θ (t ) = 0 değerleri için W ∈ Sp{a1 , a 2 , e3 } vektörü,
W = (0,1,0)
olacaktır. (5.1.10), (5.1.11) ve (5.1.12) eşitliklerinden,
a1 =
2
2
2
2
e1 +
e2 ve a 2 =
e1 −
e2
2
2
2
2
olup
75
W =
2
2
e1 −
e2
2
2
elde edilir. Bu ise S ile elde ettiğimiz vektörle aynıdır ve θ ′ − εµk1 − θ ′ + k 1 = 0 şartı
sağlanır. Dolayısıyla birim timelike küre yüzeyi ∑ düzlemi üzerinde, (X) ve (Y) pol
spacelike eğrileri boyunca homotetik olarak hareket eder
Şekil 5.1.1
5.2 E 13 Bir Altmanifoldun Düzlem Üzerindeki Hareketi
E13 uzayında herhangi spacelike, timelike veya lightlike altmanifold M ve xo ∈ M
noktasındaki teğet düzlemi ∑ olsun. E13 deki koordinat sistemi {x1 , x 2 , x3 } olmak üzere
M
manifoldunun
düzlemle
teğet
olduğu
noktadan
başlayan
birim
hızlı
diferensiyellenebilir eğri x(t ) olsun. x(t ) eğrisi boyunca M nin birim normal vektör
alanı ξ olsun. Herhangi bir t 0 anında x0 noktası, M ile ∑ düzleminin değme noktası
olduğundan bu noktalarda, spacelike manifoldlar için ξ 0 = e3 timelike manifoldlar için,
ξ 0 = e2 olacaktır. Bundan dolayı değme noktalarında, sırasıyla, Bξ = he3 ve Bξ = he2
76
yazılabilir. Ayrıca ∑ düzleminin denklemini, timelike manifoldların homotetik
hareketini oluştururken x 2 = 0 ve spacelike manifoldların homotetik hareketini
oluştururken x3 = 0 alacağız. Bu durumda F homotetik hareketini
F :M
→ ∑
x
→ y = F ( x ) = Bx + C
şeklinde tanımlayabiliriz. Burada B = hA , A ∈ SO1 (3) ve C matrisleri, elemanları t ye
göre diferensiyellenebilir fonksiyonlar olan matrislerdir.
Diğer taraftan, x(t) noktasının yörüngesi de ∑ düzlemi üzerinde bir pol eğrisi olup, x(t)
noktaları, M üzerinde bir X(t) (kısalığın hatırı için (X) ) eğrisi üzerindeki noktalar ise,
(Y) eğrisi, (X) eğrisinin homotetik hareketi sonucunda ∑ düzlemi üzerinde oluşturduğu
eğri olduğu düşünülürse
dY
dX
= B
dt
dt
(5.2.1)
olup eğer (X) birim hızlı eğri ise
dY
=h
dt
olacaktır. Yani hareketli ve sabit uzaydaki pol eğrileri farklı çizilme hızlarına sahiptir.
F, 1-parametreli homotetik hareketini oluştururken (X) ve (Y) pol eğrileri boyunca
{b1 ,b2 } ve {a1 , a2 }
vektör alan sistemlerini belirleyeceğiz. Dolayısıyla pol eğrileri
boyunca hareketli ve sabit olmak üzere {b1 , b2 , ξ } ve {a1 , a 2 , e2 } (veya {a1 , a 2 , e3 })
ortonormal vektör alanlarını elde etmiş olacağız. {b1 , b2 , ξ } ortonormal vektör alanlarını
(X) eğrisinin karakterine göre Frenet vektörlerinden ve
{T , ξ , ξΛT }
ortonormal
sisteminden yararlanarak tanımlayalım. ξ ∈ Sp{& , B} için,
ξ (t ) = λ & + µ B
olacaktır.
77
(5.2.2)
i) M bir timelike manifold ve (X) eğrisi spacelike olsun.
Bu durumda (X) eğrisi için BΛ& = T , TΛB = & ve TΛ& = B olup (5.2.2) eşitliği T ile
vektörel olarak çarpılırsa ξ , ξ = 1 olmak üzere,
ξΛT = − µ & − λ B
(5.2.3)
vektörü λ = µ için lightlike diğer durumlarda timelike vektör olacaktır. O halde
{ξ , T , ξΛT }
ortonormal sistemindeki vektör alanları için, sırasıyla, spacelike,
spacelike, timelike veya spacelike, spacelike, lightlike karakterleri söz konusu olacaktır.
a) ξΛT timelike ise;
(X) eğrisi spacelike olduğundan {T , & , B} Frenet vektörleri ve &, & = ε , B, B = −ε
olmak üzere (3.4.2) ve (3.4.3) eşitliklerinden iki durum söz konusudur.
a1) (X) pol eğrisinin asli normal vektör alanı timelike olsun.
Bu durumda & , & = − B, B = −1 , µ 2 − λ2 = 1 ve µµ ′ − λλ ′ = 0 eşitliklerini
kullanabiliriz. (5.2.2) ve (5.2.3) eşitliklerinden,
T 0 1 0 B
ξ = µ 0 λ T
ξΛT − λ 0 − µ &
1442443
(5.2.4)
Q
(3.2.1) eşitliğinden,
B k 31 k 32 k 33 e1
T = k
11 k12 k13 e2
& k 21 k 22 k 23 − e3
1442443
(5.2.5)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile arasındaki dönme açısı hiperbolik dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
78
b1 cosh θ 0 sinh θ T
ξ = 0
1
0 ξ
b2 sinh θ 0 cosh θ ξΛT
144424443
(5.2.6)
R
eşitliği vardır. (5.2.4) , (5.2.5) ve (5.2.6) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] ξ = e2
442443
A1
b2 − e3
−1
−1
−1
(5.2.7)
elde edilir. Diğer taraftan (5.2.7) eşitliği kullanılarak,
b1
e1
d dA1−1
e2
ξ =
dt
dt
− e3
b2
dA1−1
W1 =
A1 olmak üzere (5.2.7) eşitliği de kullanılırsa,
dt
− λk1 coshθ +
db1
θ ′ − µk1
0
dt
(− k 2 + λµ ′ − λ ′µ ) sinhθ
b1
dξ − λk coshθ +
− λk1 sinhθ +
1
= −
0
ξ
dt (− k 2 + λµ ′ − λ ′µ ) sinhθ
(− k 2 + λµ ′ − λ ′µ ) coshθ b
db2
2
− λk1 sinhθ +
dt
0
θ ′ − µk1
− k 2 + λµ ′ − λ ′µ ) coshθ
(4
14444444444444
444
42444444444444444444
3
W1
(5.2.8)
{
}
elde edilir. (Y) spacelike eğrisi için Frenet çatısı T , & , B olmak üzere, (Y) eğrisi
boyunca
{a1 , a 2 , e2 } ortonormal vektörlerini bulalım. (Y) eğrisi boyunca Σ düzleminin
birim normal vektör alanı e2 olup e2 spacelike vektörü ile & dik olacağından &
timelike ve bundan dolayı da B spacelike vektör olacaktır. Böylece düzlemsel (Y)
spacelike eğrisi için T ′ = k 1 & , & ′ = k 1 T olacaktır. O halde e2 = B ve e2 ΛT = − &
alınarak,
T 0 1 0 B
e 2 = 1 0 0 T
e2 ΛT 0 0 − 1 &
14243
Q
79
(5.2.9)
{
olup T , e2 , e2 ΛT
} ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1)
den,
B k 31 k 32 k 33 e1
T = k 11 k 12 k 13 e2
& k 21 k 22 k 23 − e3
1442443
(5.2.10)
P
{
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , e2 ΛT
}
arasındaki dönme açısı hiperbolik
dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cosh θ 0 sinh θ T
e = 0
1
0 e2
2
a 2 sinh θ 0 cosh θ e2 ΛT
144424443
(5.2.11)
R
ve (5.2.9), (5.2.10) ve (5.2.11) eşitlikleri kullanılırsa,
a1 e1
P Q R e 2 = e 2
144244
3
A2
a 2 − e3
[] [] []
−1
−1
−1
(5.2.12)
elde edilir. b1 = hB −1 a1 , b2 = hB −1 a 2 ve ξ = hB −1e2 olduğundan (5.2.7) ve (5.2.12)
eşitliklerinden, A = A2 A1−1 yazabiliriz. (5.2.13) eşitliğinden
a1
e1
d dA2−1
e2
e2 =
dt
dt
− e3
a 2
dA2−1
ve W2 =
A2 olmak üzere,
dt
da1
dt 0
0 θ ′ − k 1 a1
dη
= 0
0
0 η
dt
0 a2
da2 θ ′ − k 1 0
1
4
4
4
2
4
4
43
dt
W2
(5.2.13)
elde edilir.
Sonuç 5.2.1: θ ′ − k 1 = 0 ise a1 (t ) ve a 2 (t ) vektör alanları (Y) spacelike eğrisi boyunca
paralel vektör alanlarıdır.
80
İspat : Σ nın şekil operatörü S Σ = 0 olduğundan E 3 ’ün Riemann koneksiyonu ∇ ile
Σ üzerinde Gauss anlamında kovaryant türev operatörü aynı olur. (5.2.10) ve (5.2.12)
eşitlikleri kullanılarak
a1 = cosh θ T − sinh θ &
yazabiliriz.
∇ T a1 =
(
)
(
)
da1
= − k ′1 − θ ′ sinh θ T + k ′1 − θ ′ cosh θ &
dt
θ ′ − k 1 = 0 olduğundan ∇ T a1 = 0 bulunur. Benzer şekilde ∇ T a 2 = 0
olduğu
gösterilebilir.
[ ]
Diğer taraftan (5.1.16) eşitliğini kullanarak, S = s ij
3x3
matrisi, s11 = s 22 = s 33 = 0 ,
s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
− λk1 sinh θ +
− λk1 cosh θ +
θ ′ − µk1
e2 , e3
s11 = − − k 2 + λµ ′
a1 , e3 + − k 2 + λµ ′
a 2 , e3 +
θ
θ
cosh
sinh
′
−
−
k
θ
1
− λ ′µ
− λ ′µ
− λk1 sinh θ +
− λk1 cosh θ +
θ ′ − µk1
e 2 , e2
s12 = − − k 2 + λµ ′
a1 , e2 + − k 2 + λµ ′
a 2 , e2 +
θ
θ
cosh
sinh
′
−
−
θ
k
1
− λ ′µ
− λ ′µ
− λk1 sinh θ +
− λk1 cosh θ +
θ ′ − µk1
e2 , e1
= − k 2 + λµ ′
a1 , e1 − − k 2 + λµ ′
a 2 , e1 −
θ
θ
cosh
sinh
′
−
θ
−
k
1
− λ ′µ
− λ ′µ
s 23
dolayısıyla W Darboux vektörü
W
P
− λk1 sinh θ +
− λk1 cosh θ +
= −
a1 +
a 2 + θ ′ − µk1 − θ ′ − k 1 e 2
(− k 2 + λµ ′ − λ ′µ ) sinh θ
(− k 2 + λµ ′ − λ ′µ ) cosh θ
P
(
)
(5.2.14)
şeklinde olacaktır.
81
a2) (X) pol eğrisinin asli normal vektör alanı spacelike olsun.
Bu durumda
− & , & = B , B = −1 ,
λ2 − µ 2 = 1 ve λλ ′ − µµ ′ = 0 eşitliklerini
kullanabiliriz. (5.2.2) ve (5.2.3) eşitliklerinden,
T 0 1 0 &
ξ = λ 0 µ T
ξΛT − µ 0 − λ B
1442443
(5.2.15)
Q
(3.2.1) eşitliğinden,
& k 21 k 22 k 23 e1
T = k
11 k12 k13 e2
k 31 k 32 k 33 − e3
B 1
442443
(5.2.16)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
hiperbolik dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
b1 cosh θ 0 sinh θ T
ξ = 0
1
0 ξ
b2 sinh θ 0 cosh θ ξΛT
144424443
(5.2.17)
R
eşitliği vardır. (5.2.15) , (5.2.16) ve (5.2.17) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] ξ = e2
442443
A1
b2 − e3
−1
−1
−1
elde edilir. Diğer taraftan (5.2.18) eşitliği kullanılarak,
b1
e1
d dA −1
e2
ξ =
dt
dt
− e3
b2
dA1−1
ve W1 =
A1 olmak üzere (5.2.18) eşitliği de kullanılırsa,
dt
82
(5.2.18)
λk1 cosh θ −
db1
θ ′ + µk1
0
dt
(k 2 + λµ ′ − λ ′µ ) sinh θ
b1
dξ λk cosh θ −
λk1 sinh θ −
1
= −
0
ξ
dt (k 2 + λµ ′ − λ ′µ ) sinh θ
(k 2 + λµ ′ − λ ′µ ) cosh θ b
db2
2
λk1 sinh θ −
dt
0
θ ′ + µk1
k 2 + λµ ′ − λ ′µ ) cosh θ
(4
1444444444444
444244444444444444443
W1
(5.2.19)
elde edilir. (5.2.8) ve (5.2.19) eşitlikleri göz önüne alınırsa şu sonucu verebiliriz.
Sonuç 5.2.2: θ ′ + εµk1 = 0 ise b1 ve b2 vektör alanları (X) spacelike eğrisi boyunca
paralel vektör alanlarıdır.
İspat : & , & = − B, B = ε olmak üzere (5.2.2), (5.2.4), (5.2.6), (5.2.8) ve (5.2.19)
eşitliklerinden
b1 = cosh θ T − µ sinh θ & − λ sinh θ B ve ξ = λ & + µ B
yazabiliriz. M üzerindeki koneksiyon ∇ olmak üzere,
∇ T b1 = ∇ T b1 + S M (T ), b1 ξ
= ∇ T (cosh θ T − µ sinh θ & − λ sinh θ B)
+ D T (λ & + µ B ), cosh θ T − µ sinh θ & − λ sinh θ B (λ & + µ B )
(k − θ ′µ ) cosh θ −
θ ′λ cosh θ +
= {θ ′ + εk1 µ }sinh θ T + 1
& −
B
(λ ′ + µk 2 )sinh θ
(λk 2 + µ ′) sinh θ
− ελk1 cosh θ +
− ελk1 cosh θ +
+ λ
& + µ
B
((λµ ′ − µλ ′)ε + k 2 ) sinh θ
((λµ ′ − µλ ′)ε + k 2 ) sinh θ
− (θ ′ + εµk1 ) cosh θ +
(θ ′ + εµk1 ) cosh θ
= {θ ′ + εk1 µ }sinh θ T +
µ & −
λ B
(µµ ′ − λλ ′)ε sinh θ
(λλ ′ − µµ ′)ε sinh θ
ξ , ξ = 1 eşitliğinden λλ ′ − µµ ′ = 0 ve θ ′ + εµk1 = 0 olduğundan ∇ T b1 = 0 olur.
Benzer şekilde ∇ T b2 = 0 olduğu da gösterilebilir. (Y) spacelike eğrisi için boyunca
{a1 , a 2 , e2 }
ortonormal vektör alanları için (5.2.9), (5.2.10), (5.2.11), (5.2.12)
eşitliklerindeki matrisler aynı olacaktır. Dolayısıyla (5.2.14) eşitliği kullanılacaktır.
83
[ ]
(5.1.16), (5.2.15) ve (5.2.19) eşitliklerinden S = s ij
3x3
matrisi, s11 = s 22 = s 33 = 0 ,
s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
λk1 sinh θ −
λk1 cosh θ −
θ ′ + µk1
e 2 , e3
s12 = − k 2 + λµ ′
a1 , e3 + k 2 + λµ ′
a 2 , e3 +
−θ ′ − k1
− λ ′µ cosh θ
− λ ′µ sinh θ
λk1 sinh θ −
λk1 cosh θ −
θ ′ + µk1
s13 = − k 2 + λµ ′
a1 , e2 + k 2 + λµ ′
a 2 , e2 +
−θ ′ − k1
− λ ′µ cosh θ
− λ ′µ sinh θ
e2 , e 2
λk1 sinh θ −
λk1 cosh θ −
θ ′ + µk1
e2 , e1
′
s 23 = k 2 + λµ ′
a
,
e
−
a
,
e
−
k
+
λ
µ
1 1 2
2 1
cosh
sinh
θ
θ
′
−
θ
−
k
1
− λ ′µ
− λ ′µ
dolayısıyla W Darboux vektörü
λk1 sinhθ −
λk1 coshθ −
W P = −
a1 +
a2 + θ ′ + µk1 −θ ′ − k 1 e2
(k2 + λµ′ − λ ′µ) coshθ (k2 + λµ′ − λ′µ) sinhθ
P
(
)
(5.2.20)
şeklinde olacaktır. (5.2.14) ve (5.2.20) eşitliklerinden
& , & = − B, B = ε olmak
üzere,
W
P
ελk1 sinh θ −
ελk1 cosh θ −
= −
a1 +
a 2 + θ ′ + εµk1 − θ ′ − k 1 e 2
ε (εk 2 + λµ ′ − λ ′µ ) sinh θ
ε (εk 2 + λµ ′ − λ ′µ ) cosh θ
P
(
)
(5.2.21)
eşitliğini yazabiliriz.
Teorem 5.2.1: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike
eğrileri boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir
homotetik hareket olması için gerekli ve yeterli şart θ ′ + εµk1 − θ ′ − k 1 = 0 olmasıdır.
Sonuç 5.2.3: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike eğrileri
boyunca birer paralel vektör alanı sistemi
ise değme noktalarında b1 = hB −1 a1 ,
b2 = hB −1 a 2 ve ξ = hB −1e2 olacak şekilde tanımlanan
harekettir.
84
F hareketi bir homotetik
Sonuç 5.2.4: Eğer b1 (t ), b2 (t ) ve a1 (t ), a 2 (t ) , sırasıyla, (X) ve (Y) spacelike geodezik
eğrileri boyunca paralel vektör alanları ise θ ve θ hareket boyunca sabittir. Bu
durumda M manifoldu düzlem üzerinde geodezikler boyunca homotetik hareket yapar.
Sonuç 5.2.5: M nin ∑ düzlemi üzerinde geodezikler boyunca homotetik hareket
{
}
yaparken {b1 , b2 } ve {a1 , a 2 } sistemleri, sırasıyla, {T , ξΛT } ve T , e2 ΛT sistemlerine
göre aynı açılar ile dönme hareketi yapar.
Teorem 5.2.2: F hareketi bir homotetik hareket ve (X) eğrisi M nin bazı flat
noktalarından geçiyorsa bu noktalarda hareket sadece kaymadan ibarettir. Bu durumda
(5.2.21) ile verilen Darboux vektörü sıfır vektörü olacaktır.
İspat: (X) eğrisi boyunca M manifoldunun şekil operatörü S M olsun. Bu durumda
dX dξ
SM
=
dt dt
olup P noktası (X) eğrisi üzerinde olan ve M nin bir flat noktası olsun. P noktasında
dX
S M
dt
= 0
P
olacaktır. Diğer taraftan Bξ = he2 eşitliğinde türev alınırsa
dB
dξ dh
ξ+B
=
e2
dt
dt
dt
dA
dξ dh
dh
A + h B −1 Bξ + B
=
e2
dt
dt
dt
dt
dh
dA T
dξ dh
=
e2
e2 + h
A e2 + hA
dt
dt
dt
dt
P flat noktasında,
S (e2 ) = − A
(5.2.8) ve (5.2.19)eşitliklerinden,
85
dξ
dt
P
(5.2.22)
dξ
dt
P
( )+ ελ(kεksinh+ λθµ−′ − λ ′µ )sinh θ A(b )
ελk1 cosh θ −
=
ε (εk 2 + λµ ′ − λ ′µ )sinh θ
1
4444244443
β1
= β 1 (P )a1 p + β 2 (P )a 2
A b1
1
p
2 p
144
2
44244443
β2
P
P
p
(5.2.22) den β1 (P ) = 0 ve β 2 (P ) = 0 ve dolayısıyla S=0 bulunur. (3.5.7) eşitliğinden
dX
H
dt
dX
= ϕ (t )
P
dt
dX
dX
+ S
ve H
dt P
P
2
dt
14
4
3
dX
= ϕ
P
dt
P
=0
olur. O halde M üzerindeki flat noktalarda hareket sadece kaymadan ibarettir.
Sonuç 5.2.6: Bir M timelike manifoldun, timelike düzlem üzerinde 1-parametreli
homotetik hareket yapması için M üzerindeki (X) spacelike eğrisinin M nin hiçbir flat
noktasından geçmemesi gerekir.
Sonuç 5.2.7: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) düzlemsel ve (Y)
eğrileri boyunca birer paralel vektör alanı sistemi ve λ = 0 ise F hareketi sadece kayma
hareketidir.
İspat: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) eğrileri boyunca birer
paralel vektör alanı ise
θ ′ + εµk1 − θ ′ − k 1 = 0
olur. (X) düzlemsel eğri ve λ = 0 ise (5.2.21) den P değme noktalarında, W
P
=0
olacaktır. Dolayısıyla S=0 ve (3.5.7) eşitliğinden hareket sadece kaymadan ibaret olur.
Sonuç 5.2.8: F bir homotetik hareket, (X) ve (Y), sırasıyla, M ve ∑ üzerinde birer
eğrilik çizgisi ve λ , k1 ayrı ayrı sabit ise θ ′ − θ ′ = −εµk1 = sabittir. Özel olarak µ = 0
ise, (X) eğrisi M timelike manifoldu üzerinde spacelike geodezik eğrilik çizgisidir.
86
Sonuç 5.2.9: F homotetik hareketi sadece kaymadan ibaret ise, (X) eğrisi M spacelike
normalli manifold üzerinde düzlemsel spacelike asimptotik çizgidir ve θ , θ sabit
açıları için
k1
oranı hareket boyunca sabittir.
k1
Sonuç 5.2.10: F homotetik hareketi boyunca,
1. W Darboux vektörü lightlike ise, λ ′µ − λµ ′ = ε k 2 m λk1
2. W Darboux vektörü timelike ise, λ ′µ − λµ ′ = εk 2 − λ2 k1 − 1
2
3. W Darboux vektörü spacelike ise, λ ′µ − λµ ′ = εk 2 − λ2 k1 + 1 eşitliği
2
sağlanır.
b) ξΛT lightlike ise;
Bu durumda λ = µ olacağından uygun bir Q, Q ∈ SO1 (3) matrisleri oluşturulamaz.
Dolayısıyla F : M
→ ∑ olacak şekilde bir homotetik hareket tanımlanamaz.
ii) M bir timelike manifold ve (X) eğrisi timelike olsun.
Bu durumda, (X) timelike eğrisinin Frenet vektörleri {T , & , B} olmak üzere T ′ = k1 & ,
& ′ = k1T + k 2 B ve B ′ = − k 2 & olacaktır. M manifoldunun birim normal vektör alanı
spacelike olduğundan ξΛT spacelike vektör alanı olacaktır. O halde BΛ& = T ,
TΛB = − & ve TΛ& = B olup (5.2.2) eşitliği T ile vektörel olarak çarpılırsa ξ , ξ = 1
olmak üzere,
ξΛT = µ & − λ B
(5.2.23)
ve buradan da Q matrisi,
ξΛT µ − λ 0 &
ξ = λ µ 0 B
T 0 0 1 T
14
4244
3
Q
(3.2.1) eşitliğinden,
87
(5.2.24)
& k 21 k 22 k 23 e1
B = k
31 k 32 k 33 e2
T k11 k12 k13 − e3
1442443
(5.2.25)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
hiperbolik dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
b2 cosh θ 0 sinh θ ξΛT
ξ = 0
1
0 ξ
b1 sinh θ 0 cosh θ T
144424443
(5.2.26)
R
eşitliği vardır. (5.2.24) , (5.2.25) ve (5.2.26) eşitlileri kullanılarak,
b2 e1
[1
P ] [Q ] [R ] ξ = e2
442443
A1
b1 − e3
−1
−1
−1
(5.2.27)
elde edilir. Diğer taraftan, (5.2.27) eşitliği kullanılarak,
b2
e1
d dA −1
e2
ξ =
dt
dt
− e3
b1
ve W1 =
dA1−1
A1 olmak üzere (5.2.27) eşitliği de kullanılırsa,
dt
λk1 sinh θ +
db2
θ ′ + µk1
0
dt
(k 2 + λµ ′ − λ ′µ ) cosh θ
b2
dξ λk sinh θ +
λk1 cosh θ +
1
= −
0
ξ
dt (k 2 + λµ ′ − λ ′µ ) cosh θ
(k 2 + λµ ′ − λ ′µ ) sinh θ b
db1
1
λk1 cosh θ +
′ + µk1
dt
0
θ
(k 2 + λµ ′ − λ ′µ ) sinh θ
14444444444444
444244444444444444443
W1
(5.2.28)
elde edilir. θ = 0 özel durumunda, ρ g , ρ n ve τ g (X) eğrisinin sırasıyla, geodezik
eğriliği, normal eğriliği ve geodezik burulması olmak üzere ρ g = µk1 , ρ n = λk1 ve
τ g = −(k 2 + λµ ′ − λ ′µ ) bulunur. Dolayısıyla (X) eğrisinin açısal hız vektörü vektörü
88
ω1 = −(k 2 + λµ ′ − λ ′µ )T + λk1ξΛT + µk1ξ
bulunur (Uğurlu 1996).
Sonuç 5.2.11: θ ′ + µk1 = 0 ise b1 ve b2 vektör alanları (X) spacelike eğrisi boyunca
paralel vektör alanlarıdır.
İspat : E13 ün Riemann koneksiyonu ∇ , M üzerinde Gauss anlamında kovaryant türev
operatörü de ∇ ve M küresinin şekil operatörü S olsun. Hareketin her t anında b1 (t )
ve X(t) vektör alanları (5.2.24) ve (5.2.26) eşitliklerinden
b1 = cosh θ T + µ sinh θ & − λ sinh θ B ve ξ = λ & + µ B
olduğunu biliyoruz.
∇ T b1 = ∇ T b1 + S M (T ), b1 ξ
= ∇ T (cosh θ T + µ sinh θ & − λ sinh θ B)
+ ∇ T (λ & + µ B ) , cosh θ T + µ sinh θ & − λ sinh θ B (λ & + µ B )
(k + θ ′µ ) cosh θ +
(µk 2 − λ ′)sinh θ
= {θ ′ + k1 µ }sinh θ T + 1
& +
B
− θ ′λ cosh θ
(λ + µ ′k 2 )sinh θ
− λk1 cosh θ +
− λk1 cosh θ +
+ λ
& + µ
B
(µλ ′ − λµ ′ − k 2 )sinh θ
(µλ ′ − λµ ′ − k 2 )sinh θ
(µk + θ ′)µ cosh θ
(µk1 + θ ′) cosh θ
= (θ ′ + k1 µ )sinh θ T + 1
& − λ
B
+ µ (λλ ′ + µµ ′) sinh θ
+ (λλ ′ + µµ ′)sinh θ
ξ , ξ = 1 eşitliğinden λλ ′ + µµ ′ = 0 bulunur. Bu eşitlik ve θ ′ + µk1 = 0 eşitliği
kullanılırsa ∇ T b1 = 0 bulunur. Benzer şekilde ∇ T b2 = 0 olduğu da gösterilebilir.
{
}
Benzer şekilde, (Y) timelike eğrisi için Frenet çatısı T , & , B olmak üzere, (Y) eğrisi
boyunca
{a1 , a 2 , e2 } ortonormal vektörlerini bulalım. (Y) eğrisi boyunca Σ düzleminin
birim normal vektör alanı e2 olup e2 spacelike vektörü ile & dik olacağından &
spacelike ve bundan dolayı da B spacelike vektör olacaktır. Böylece düzlemsel (Y)
timelike eğrisi için T ′ = k 1 & , & ′ = k 1 T olacaktır. O halde e2 = B ve e2 ΛT = &
alınarak,
89
e2 ΛT 1 0 0 &
e 2 = 0 1 0 B
T 0 0 1 T
14243
(5.2.29)
Q
{
}
olup T , e2 , e2 ΛT ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1)den,
& k 21 k 22 k 23 e1
B = k 31 k 32 k 33 e2
T k 11 k 12 k 13 − e3
1442443
(5.2.30)
P
{
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , e2 ΛT
}
arasındaki dönme açısı hiperbolik
dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a 2 cosh θ 0 sinh θ e2 ΛT
e = 0
1
0 e2
2
a1 sinh θ 0 cosh θ T
44424443
1
(5.2.31)
R
ve (5.2.29), (5.2.30) ve (5.2.31) eşitlikleri kullanılırsa,
a 2 e1
P Q R e 2 = e 2
144244
3
A2
a1 − e3
[] [] []
−1
−1
−1
(5.2.32)
elde edilir. b1 = hB −1 a1 , b2 = hB −1 a 2 ve ξ = hB −1e2 olduğundan (5.2.27) ve (5.2.32)
eşitliklerinden, A = A2 A1−1 yazabiliriz. (5.2.32) eşitliğinden
a 2
e1
d dA2−1
e2
e2 =
dt
dt
− e3
a1
dA2−1
ve W2 =
A2 olmak üzere,
dt
da 2
dt
0 θ ′ + k 1 a 2
de 0
2
= 0
0
0 e2
dt
0 a1
da1 θ ′ + k 1 0
1
4
4
4
2
4
4
43
dt
W2
90
(5.2.33)
elde edilir. θ = 0 özel durumunda, ρ g , ρ n ve τ g (Y) eğrisinin sırasıyla, geodezik
eğriliği, normal eğriliği ve geodezik burulması olmak üzere ρ g = k 1 , ρ n = 0 ve
τ g = 0 bulunur. Dolayısıyla (Y) eğrisinin açısal hız vektörü vektörü
ω 2 = k 1η
bulunur (Uğurlu 1996).
Sonuç 5.2.12: θ ′ + k 1 = 0 ise a1 (t ) ve a 2 (t ) vektör alanları (Y) timelike eğrisi boyunca
paralel vektör alanlarıdır.
İspat : Σ nın şekil operatörü S Σ = 0 olduğundan E 3 ün Riemann koneksiyonu ∇ ile
Σ üzerinde Gauss anlamında kovaryant türev operatörü aynı olur. (5.2.31) ve (5.2.33)
eşitlikleri kullanılarak
a1 = cosh θ T + sinh θ &
yazabiliriz.
∇ T a1 =
(
)
(
)
da1
= k ′1 + θ ′ sinh θ T + k ′1 + θ ′ cosh θ &
dt
θ ′ + k 1 = 0 olduğundan ∇ T a1 = 0 elde edilir. Benzer şekilde ∇ T a 2 = 0 olduğu da
gösterilebilir. Diğer taraftan (5.1.16), (5.2.28) ve (5.2.33) eşitlikleri kullanarak,
S : TY (t ) Σ
→ Sp{e2 }
lineer
dönüşümünü
temsil
eden
[ ]
S = s ij
3x3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
λk1 sinh θ +
− λk1 cosh θ −
θ ′ + µk1
e 2 , e3
s12 = k 2 + λµ ′
a1 , e3 − k 2 + λµ ′
a 2 , e3 +
θ
θ
cosh
sinh
′
−
θ
−
k
1
− λ ′µ
− λ ′µ
λk1 sinh θ +
− λk1 cosh θ −
θ ′ + µk1
e 2 , e2
s13 = k 2 + λµ ′
a1 , e2 − k 2 + λµ ′
a 2 , e2 +
−θ ′ − k1
− λ ′µ cosh θ
− λ ′µ sinh θ
λk1 sinh θ +
− λk1 cosh θ −
θ ′ + µk1
e2 , e1
s 23 = − k 2 + λµ ′
a1 , e1 + k 2 + λµ ′
a 2 , e1 −
−θ ′ − k1
− λ ′µ cosh θ
− λ ′µ sinh θ
91
dolayısıyla W ∈ Sp{a1 , a 2 , e2 } hareketin yuvarlanma kısmına ait Darboux vektörü
P=(0,0,0) olmak üzere,
W
P
λk1 sinh θ +
− λk1 cosh θ −
=
a1 −
a 2 + θ ′ + µk1 − θ ′ − k 1 e2
(k 2 + λµ ′ − λ ′µ )sinh θ
(k 2 + λµ ′ − λ ′µ ) cosh θ
P
(5.2.34)
(
)
şeklinde olacaktır.
Teorem 5.2.3: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) timelike eğrileri
boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir homotetik
hareket olması için gerekli ve yeterli şart θ ′ + µk1 − θ ′ − k 1 = 0 olmasıdır.
Sonuç 5.2.13: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) timelike eğrileri
boyunca birer paralel vektör alanı sistemi
ise değme noktalarında b1 = hB −1 a1 ,
b2 = hB −1 a 2 ve ξ = hB −1e2 olacak şekilde tanımlanan
F hareketi bir homotetik
harekettir.
Sonuç 5.2.14: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) timelike geodezik
eğrileri boyunca paralel vektör alanları ise θ
ve θ hareket boyunca sabittir. Bu
durumda M manifoldu düzlem üzerinde geodezikler boyunca homotetik hareket yapar.
Sonuç 5.2.15: M nin ∑ düzlemi üzerinde timelike geodezikler boyunca homotetik
{
hareket yaparken {b1 , b2 } ve {a1 , a 2 } sistemleri, sırasıyla, {T , ξΛT } ve T , e2 ΛT
}
sistemlerine göre aynı açılar ile dönme hareketi yapar.
Teorem 5.2.4: F hareketi bir homotetik hareket ve (X)
eğrisi M nin bazı flat
noktalarından geçiyorsa bu noktalarda hareket sadece kaymadan ibarettir. Bu durumda
(5.2.21) ile verilen Darboux vektörü sıfır vektörü olacaktır.
İspat: Teorem 5.2.2 nin ispatına benzer şekilde ispatlanabilir.
92
Sonuç 5.2.16: Bir M timelike manifoldun, timelike düzlem üzerinde 1-parametreli
homotetik hareket yapması için M üzerindeki (X) timelike eğrisinin M nin hiçbir flat
noktasından geçmemesi gerekir.
Sonuç 5.2.17: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) düzlemsel timelike ve
(Y) timelike eğrileri boyunca birer paralel vektör alanı sistemi ve λ = 0 ise, F hareketi
sadece kayma hareketidir.
İspat: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) eğrileri boyunca birer
paralel vektör alanı ise
θ ′ + µk1 − θ ′ − k 1 = 0
olur. (X) düzlemsel eğri ve λ = 0 ise (5.2.34) den P değme noktalarında, W
P
=0
olacaktır. Dolayısıyla S=0 ve (3.5.7) eşitliğinden hareket sadece kaymadan ibaret olur.
Sonuç 5.2.18: F bir homotetik hareket, (X) ve (Y), sırasıyla, M ve ∑ üzerinde birer
eğrilik çizgisi ve λ , k1 ayrı ayrı sabit ise θ ′ − θ ′ = −εµk1 = sabittir. Özel olarak µ = 0 ise
(X), M timelike manifold üzerinde timelike geodezik eğrilik çizgisidir.
Sonuç 5.2.19: F homotetik hareketi sadece kaymadan ibaret ise (X) eğrisi M timelike
manifoldu üzerinde düzlemsel timelike asimptotik çizgidir ve θ , θ sabit açıları için
oranı hareket boyunca sabittir.
Sonuç 5.2.20: F homotetik hareketi boyunca,
1. W Darboux vektörü lightlike ise, λ ′µ − λµ ′ = k 2 m λk1
2. W Darboux vektörü timelike ise, λ ′µ − λµ ′ = k 2 − λ2 k1 − 1
2
3. W Darboux vektörü spacelike ise, λ ′µ − λµ ′ = k 2 − λ2 k1 + 1 eşitliği
2
sağlanır.
93
k1
k1
iii) M bir timelike manifold ve (X) eğrisi lightlike olsun.
(X) lightlike eğrisinin Frenet vektörleri {T , & , B} ve T, N lightlike ve B timelike veya
spacelike olmak üzere iki durum söz konusudur. Fakat bunların hiçbirisi için {T , & , B}
sistemi bir ortonormal sistem oluşturmadığından P ∉ SO1 (3) olacaktır. Dolayısıyla bir
homotetik hareket denklemi oluşturulamaz.
Sonuç 5.2.21: Timelike manifoldlar, değme noktalarındaki timelike düzlem üzerinde
hareketli lightlike eğri ve sabit spacelike eğriler boyunca homotetik olarak hareket
etmez.
iv) M bir spacelike manifold ve (X) eğrisi spacelike olsun.
(X) eğrisi spacelike olduğundan, (3.4.2) ve (3.4.3) eşitiklerinden {T , & , B} Frenet
vektörleri için, &, & = ε , B, B = −ε olmak üzere iki durum söz konusudur.
a) (X) pol eğrisinin asli normal vektör alanı timelike olsun.
Bu durumda
& , & = − B , B = −1 ,
λ2 − µ 2 = 1 ve λλ ′ − µµ ′ = 0 eşitliklerini
kullanabiliriz.
T 0 1 0 B
ξΛT = − λ 0 − µ T
ξ µ 0 λ &
1442443
(5.2.35)
Q
(3.2.1) eşitliğinden,
B k 31 k 32 k 33 e1
T = k
11 k12 k13 e2
& k 21 k 22 k 23 − e3
1442443
(5.2.36)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
94
b1 cos θ sin θ 0 T
b = − sin θ cos θ 0 ξΛT
2
ξ 0
0
1 ξ
14442444
3
(5.2.37)
R
eşitliği vardır. (5.2.35) , (5.2.36) ve (5.2.37) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] b2 = e2
442443
A1
ξ − e3
−1
−1
−1
(5.2.38)
elde edilir. Diğer taraftan (5.2.38) eşitliği kullanılarak,
b1
e1
d dA −1
e2
b2 =
dt
dt
− e3
ξ
dA1−1
ve W1 =
A1 olmak üzere (5.2.38) eşitliği de kullanılırsa,
dt
λ k1 cos θ −
db1
0
θ ′ + µk 1
dt
(k 2 + λµ ′ − λ ′µ ) sin θ b
1
db
λk 1 sin θ +
2=
0
− θ ′ − µk 1
−
b
2
dt
(k 2 + λ µ ′ − λ ′µ ) cos θ ξ
dξ λ k cos θ −
λk 1 sin θ +
dt 1
0
−
k 2 + λ µ ′ − λ ′µ ) sin θ
(k 2 + λµ ′ − λ ′µ ) cos θ
(4
1
444444444444
44424444444444444444
3
W1
(5.2.39)
{
}
elde edilir. Benzer şekilde, (Y) spacelike eğrisi için Frenet çatısı T , & , B olmak üzere,
(Y) eğrisi boyunca
{a1 , a 2 , e3 }
ortonormal vektörlerini bulalım. (Y) eğrisi boyunca Σ
düzleminin birim normal vektör alanı e3 olup e3 timelike vektörü ile & dik
olacağından & spacelike ve bundan dolayı da B timelike vektör olacaktır. Böylece
düzlemsel (Y) spacelike eğrisi için T ′ = k 1 & , & ′ = − k 1 T olacaktır. O halde e3 = B ve
e3 ΛT = − & olup,
T 0 1 0 &
e3 ΛT = − 1 0 0 T
e3 0 0 1 B
14243
Q
(3.2.1) eşitliğinden,
95
(5.2.40)
& k 21 k 22 k 23 e1
T = k 11 k 12 k 13 e2
B k 31 k 32 k 33 − e3
1442443
(5.2.41)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cos θ sin θ 0 T
a = − sin θ cos θ 0 e ΛT
3
2
e3
e3 0
0
1
4442444
1
3
(5.2.42)
R
eşitliği vardır. (5.2.40) , (5.2.41) ve (5.2.42) eşitlileri kullanılarak,
a1 e1
P Q R a 2 = e2
144244
3
A2
e3 − e3
[][][]
−1
−1
−1
(5.2.43)
elde edilir. Diğer taraftan (5.2.43) eşitliği kullanılarak,
a1
e1
d dA2−1
e2
a 2 =
dt
dt
− e3
η
ve W1 =
dA1−1
A1 olmak üzere (5.2.43) eşitliği de kullanılırsa,
dt
da1
dt
θ ′ − k 1 0 a1
da 0
2 = − θ ′ + k 1
0
0 a 2
dt
0
0 e 3
de 3 0
1
4
4
4
4
2
4
4
4
4
3
dt
W2
(5.2.44)
Sonuç 5.2.22: θ ′ − k 1 = 0 ise a1 (t ) ve a 2 (t ) vektör alanları (Y) spacelike eğrisi
boyunca paralel vektör alanlarıdır.
İspat: Sonuç 5.2.1 in ispatına benzer şekilde ispatlanabilir.
96
(5.1.16),
(5.2.39)
ve
(5.2.44)
eşitlikleri
yardımıyla
[ ]
S = s ij
3x 3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
− λk1 sin θ −
λk1 cos θ −
θ ′ + µk1
e3 , e3
′
+
+
s12 = − k 2 + λµ ′
a
,
e
a
,
e
λ
µ
+
k
1 3 2
2 3
θ
θ
cos
sin
′
−
θ
+
k
1
− λ ′µ
− λ ′µ
− λk1 sin θ −
λk1 cos θ −
θ ′ + µk1
e3 , e 2
s13 = − k 2 + λµ ′
a1 , e2 + k 2 + λµ ′
a 2 , e2 +
−θ ′ + k1
− λ ′µ cos θ
− λ ′µ sin θ
− λk1 sin θ −
λk1 cos θ −
θ ′ + µk1
e3 , e1
s 23 = k 2 + λµ ′
a1 , e1 − k 2 + λµ ′
a 2 , e1 −
−θ ′ + k1
− λ ′µ cos θ
− λ ′µ sin θ
dolayısıyla W ∈ Sp{a1 , a 2 , e3 } hareketin yuvarlanma kısmına ait Darboux vektörü
P=(0,0,0) olmak üzere,
W
P
− λk1 sin θ −
λk1 cos θ −
= −
a1 +
a 2 + θ ′ + µk1 − θ ′ + k 1 e3
(k 2 + λµ ′ − λ ′µ )sin θ
(k 2 + λµ ′ − λ ′µ ) cos θ
P
(5.2.45)
(
)
şeklinde olacaktır.
b) (X) pol eğrisinin asli normal vektör alanı spacelike olsun.
Bu durumda
− & , & = B , B = −1 ,
µ 2 − λ2 = 1 ve
µµ ′ − λλ ′ = 0 eşitliklerini
kullanabiliriz. (5.2.2) ve (5.2.3) eşitliklerinden,
T 0 1 0 &
ξΛT = − µ 0 − λ T
ξ λ 0 µ B
1442443
Q
(3.2.1) eşitliğinden,
97
(5.2.46)
& k 21 k 22 k 23 e1
T = k
11 k12 k13 e2
B k 31 k 32 k 33 − e3
1442443
(5.2.47)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
b1 cos θ sin θ 0 T
b = − sin θ cos θ 0 ξΛT
2
ξ 0
0
1 ξ
14442444
3
(5.2.48)
R
eşitliği vardır. (5.2.46) , (5.2.47) ve (5.2.48) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] b2 = e2
442443
A1
ξ − e3
−1
−1
−1
(5.2.49)
elde edilir. Diğer taraftan (5.2.49) eşitliği kullanılarak,
b1
e1
d dA −1
e2
b2 =
dt
dt
− e3
ξ
ve W1 =
dA1−1
A1 olmak üzere (5.2.49) eşitliği de kullanılırsa,
dt
− λk1 cosθ +
db1
θ ′ − µk1
0
dt
(− k 2 + λµ ′ − λ ′µ ) sin θ b
1
db
λk1 sinθ +
2=
− θ ′ + µk1
0
b
2
dt
(− k 2 + λµ ′ − λ ′µ ) cosθ ξ
dξ − λk cosθ +
λk1 sin θ +
1
dt
0
− k 2 + λµ ′ − λ ′µ ) sin θ (− k 2 + λµ ′ − λ ′µ ) cosθ
(4
1
444444444444444244444444444444443
W1
(5.2.50)
elde edilir. & , & = − B, B = −ε olmak üzere (5.2.39) ve (5.2.50) eşitliklerinden şu
sonucu verebiliriz.
Sonuç 5.2.23: θ ′ − εµk1 = 0 ise b1 ve b2 vektör alanları (X) spacelike eğrisi boyunca
paralel vektör alanlarıdır.
98
İspat : Sonuç 5.2.2 in ispatına benzer şekilde ispatlanabilir.
{
}
(Y) spacelike eğrisi için Frenet çatısı T , & , B
{a1 , a 2 , e3 }
olmak üzere, (Y) eğrisi boyunca
ortonormal vektörlerini bulalım. (Y) eğrisi boyunca Σ düzleminin birim
normal vektör alanı e3 olup e3 timelike vektörü ile & dik olacağından & spacelike ve
bundan dolayı da B timelike vektör olacaktır. Böylece düzlemsel (Y) spacelike eğrisi
için T ′ = k 1 & , & ′ = − k 1 T olacaktır. O halde e3 = B ve e3 ΛT = − & olup (5.2.40),
(5.2.41), (5.2.42), (5.2.43) ve (5.2.44) eşitlikleri kullanılacaktır. (5.1.16), (5.2.44 ) ve
(5.2.50)eşitlikleri yardımıyla
[ ]
S = s ij
3x 3
matrisi,
s11 = s 22 = s 33 = 0 ,
s12 = − s 21 ,
s13 = s 31 ve s 23 = s32 olmak üzere
λk1 sin θ +
− λk1 cos θ +
θ ′ − µk1
e3 , e3
s12 = − − k 2 + λµ ′
a1 , e3 + − k 2 + λµ ′
a 2 , e3 +
θ
θ
cos
sin
′
−
θ
+
k
1
− λ ′µ
− λ ′µ
λk1 sin θ +
− λk1 cos θ +
θ ′ − µk1
e3 , e 2
s13 = − − k 2 + λµ ′
a1 , e2 + − k 2 + λµ ′
a 2 , e2 +
cos θ
sin θ
−θ ′ + k1
− λ ′µ
− λ ′µ
λk1 sin θ +
− λk1 cos θ +
θ ′ − µk1
e3 , e1
s32 = − k 2 + λµ ′
a1 , e1 − − k 2 + λµ ′
a 2 , e1 −
cos θ
sin θ
−θ ′ + k1
− λ ′µ
− λ ′µ
dolayısıyla W ∈ Sp{a1 , a 2 , e3 } hareketin yuvarlanma kısmına ait Darboux vektörü
P=(0,0,0) olmak üzere,
W
P
λk1 sin θ +
− λk1 cos θ +
= −
a1 +
a 2 + θ ′ − µk1 − θ ′ + k 1 e3
(− k 2 + λµ ′ − λ ′µ )sin θ
(− k 2 + λµ ′ − λ ′µ ) cos θ
P
(5.2.51)
(
)
şeklinde olacaktır. & , & = − B, B = −ε olmak üzere (5.2.45) ve (5.2.51) eşitliklerini
göz önüne alarak şu eşitliği verebiliriz.
W
P
ελ k 1 sin θ +
− ελ k 1 cos θ +
= −
a1 +
a 2 + θ ′ − εµ k 1 − θ ′ + k 1 e 3
ε (− εk 2 + λ µ ′ − λ ′µ ) sin θ
ε (− εk 2 + λ µ ′ − λ ′µ ) cos θ
P
(
)
(5.2.52)
99
Teorem 5.2.4: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike
eğrileri boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir
homotetik hareket olması için gerekli ve yeterli şart θ ′ − εµk1 − θ ′ + k 1 = 0 olmasıdır.
Sonuç 5.2.24: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike
eğrileri boyunca birer paralel vektör alanı sistemi ise değme noktalarında b1 = hB −1 a1 ,
b2 = hB −1 a 2 ve ξ = hB −1e3 olacak şekilde tanımlanan
F hareketi bir homotetik
harekettir.
Sonuç 5.2.25: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) spacelike geodezik
eğrileri boyunca paralel vektör alanları ise θ
ve θ hareket boyunca sabittir. Bu
durumda M spacelike manifoldu, spacelike düzlem üzerinde, spacelike geodezikler
boyunca homotetik hareket yapar.
Sonuç 5.2.26: M nin ∑ düzlemi üzerinde spacelike geodezikler boyunca homotetik
{
hareket yaparken {b1 , b2 } ve {a1 , a 2 } sistemleri, sırasıyla, {T , ξΛT } ve T , e3 ΛT
}
sistemlerine göre aynı açılar ile dönme hareketi yapar.
Teorem 5.2.6: F hareketi bir homotetik hareket ve (X) spacelike eğrisi M spacelike
manifoldun bazı flat noktalarından geçiyorsa bu noktalarda hareket sadece kaymadan
ibarettir. Bu durumda (5.2.52) ile verilen Darboux vektörü sıfır vektörü olacaktır.
İspat: Teorem 5.2.2 nin ispatına benzer şekilde ispatlanabilir.
Sonuç 5.2.27: Bir M spacelike manifoldun, spacelike düzlem üzerinde 1-parametreli
homotetik hareket yapması için, M üzerindeki (X) spacelike eğrisinin M nin hiçbir flat
noktasından geçmemesi gerekir.
100
Sonuç 5.2.28: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) düzlemsel ve (Y)
spacelike eğrileri boyunca birer paralel vektör alanı sistemi ve λ = 0 ise F hareketi
sadece kayma hareketidir.
İspat: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) eğrileri boyunca birer
paralel vektör alanı ise
θ ′ − εµk1 − θ ′ + k 1 = 0
olur. (X) düzlemsel eğri ve λ = 0 ise (5.2.52) den P değme noktalarında, W
P
=0
olacaktır. Dolayısıyla S=0 ve (3.5.7) eşitliğinden hareket sadece kaymadan ibaret olur.
Sonuç 5.2.29: F bir homotetik hareket, (X) ve (Y), sırasıyla, M ve ∑ üzerinde birer
eğrilik çizgisi ve λ , k1 ayrı ayrı sabit ise θ ′ − θ ′ = εµk1 = sabittir. Özel olarak µ = 0 ise
(X) M spacelike manifold üzerinde, spacelike geodezik eğrilik çizgisidir.
Sonuç 5.2.30: F homotetik hareketi sadece kaymadan ibaret ise (X), M spacelike
manifoldu üzerinde, düzlemsel spacelike asimptotik çizgidir ve θ , θ sabit açıları için
k1
oranı hareket boyunca sabittir.
k1
Sonuç 5.2.31: F homotetik hareketi boyunca,
1. W Darboux vektörü lightlike ise, λ = k 2 = 0 veya k1 = 0 , λ ′µ − λµ ′ = −εk 2
olur.
2. W Darboux vektörü timelike olamaz.
3. W Darboux vektörü spacelike ise, λµ ′ − λ ′µ = −εk 2 − 1 − λ2 k1
2
eşitliği
sağlanır.
Sonuç 5.2.32: M manifoldu hiperbolik küre ise, bölüm 5.1 de verilen sonuçlar elde
edilir.
101
v) M bir lightlike manifold ve (X) eğrisi spacelike olsun.
Q ∈ SO1 (3) matrisi vektörlerin karakterlerini koruyacağından ξ lightlike vektör alanını
yine başka bir lightlike vektör alanına dönüştürecektir. Dolayısıyla (X) eğrisi timelike
veya spacelike ise Frenet vektörlerinden hiçbiri lightlike olmadığı için bir hareket
denklemi oluşturulamaz. Ancak eğri eğer lightlike asli normalli spacelike eğri olsa bile
ortonormal çatıya sahip olmayacağından yine bir hareket denklemi oluşturulamaz.
Sonuç 5.2.23: Lightlike manifoldlar, spacelike düzlem üzerinde, hareketli ve sabit
spacelike pol eğrileri boyunca homotetik olarak hareket etmez.
vi) M bir lightlike manifold ve (X) eğrisi light -like olsun.
Yine (X) eğrisi lightlike ve lightlike eğrileri ortonormal bir çatıya sahip olmadığından
P, P ∈ SO1 (3) olacak şekilde bir matris bulunamaz. Dolayısıyla bu durum için de bir
hareket denklemi oluşturulamaz.
Sonuç 5.2.34 Lightlike manifoldlar spacelike düzlem üzerinde, hareketli lightlike eğri
ve sabit spacelike eğriler boyunca homotetik olarak hareket etmez.
Diğer taraftan, timelike yüzeylerin eğrilik çizgileri boyunca, Darboux çatısı ve Darboux
vektörü alınmış ve elde edilen sonuçlar belirtilmiştir (Uğurlu and Topal 1996).
Örnek 5.2.1:
Denklemi x 2 − (1 − z ) = −1 ile verilen M spacelike silindiri üzerinde, denklemi
2
0≤t ≤π
için,
t t
t
X (t ) = sinh
,1 − cosh
,
ile verilen timelike asli
2
2
2
t2
normalli spacelike helis eğrisinin, denklemi Y (t ) = , 0 , 0 ile verilen eğri üzerindeki
2
homotetik hareketini bulalım. X(t) eğrisi için,
102
T=
t
t ,
t
t
1
cosh
, 1 , − sinh
& = sinh
,0,− cosh
2
2
2
2
2
B=
t
t k = 1 ve k = − 1
1
− cosh
, 1 , sinh
1
2
2
2
2
2
2
olup, M silindirinin (X) boyunca birim normal vektör alanı
t
t
e1 + cosh
e3
2
2
ξ (t ) = sinh
t
2
ξ (t ), e3 = − cosh
t
t
e1 − cosh
(− e3 )
2
2
ξ (t ) = sinh
olur. Dolayısıyla, λ = 1 ve µ = 0 olup hareket boyunca sabittir. Y(t) eğrisi için,
T = (1, 0 , 0) , & = (0,1,0 ) B = (0, 0 , 1) , k 1 = 0 , k 2 = 0 , λ = 0 ve µ = 1 ,
dY
=h=t
dt
bulunur.
dY
dX
=B
dt
dt
eşitliği de göz önüne alınarak her θ (t ) = θ =
π
2
t
t
cosh
2
2
t
t
B(t ) = −
cosh
2
2
t
− t sinh 2
bulunur.
için B matrisi,
t
2
t
2
0
−
t
sinh
2
2
t
t
sinh
2
2
t
t cosh
2
t
dB
dC
X+
= 0 ve Y = BX + C eşitliklerini sağlayan C matrisi ve hareketin
dt
dt
denklemi ,
t
t
cosh
2
2
t
t
Y (t ) = −
cosh
2
2
t
− t sinh 2
t
2
t
2
0
−
t
t
t
sinh
sinh
−
2
2
2
2 2
t
t
t
t
t
sinh
sinh
X (t ) + − +
2
2
2
2
2
t
t
t cosh
− t + t cosh
2
2
t
103
olarak bulunmuş olur. Bu hareketin yuvarlanma kısmına ait Darboux matrisi ve
W ∈ Sp{e1 , e2 , − e3 } Darboux vektörü de
0
S = 0
− 1
2
0
0
1
2
1
−
2
1
2
0
ve W
P
olacaktır. (5.2.45) eşitliğinden, λ = 1 , µ = 0 , k1 =
θ (t ) = θ =
π
2
1
1
= − , − , 0
2
2
1
1
, k2 = − , k 1 = 0 , k 2 = 0 , λ = 0 ,
2
2
ve µ = 1 değerleri için W ∈ Sp{a1 , a 2 , − e3 } W vektörü,
W =
1
1
a1 + a 2
2
2
ve (5.2.40), (5.2.41) ve (5.2.42) eşitliklerinden,
a1 = −e2 ve a 2 = −e1
olup
1
1
W = − e2 − e1
2
2
elde edilir. Bu ise S ile elde ettiğimiz vektörle aynıdır. Dolayısıyla spacelike silindiri,
spacelike düzlem üzerinde, timelike asli normalli spacelike (X) ve spacelike asli
normalli spacelike (Y) pol eğrileri boyunca homotetik olarak hareket eder.
Şekil 5.2.1
104
5.3 E 13 de İki Altmanifoldun Birbiri Üzerindeki Hareketi
M ve N, E13 uzayında herhangi 2-boyutlu regüler altmanifold ve xo ∈ M noktası iki
manifoldun değme noktası olsun. M nin N ile teğet olduğu noktadan başlayan birim
hızlı diferensiyellenebilir eğri x(t ) ve N üzerinde hareketin her t anında x(t ) eğrisine
değen eğri y (t ) olsun. M nin N üzerindeki homotetik hareketi şöyle tanımlanabilir; I ⊂
IR sıfırı içeren bir aralık olsun. A∈SO1(3), C∈IR 13
t ye göre diferensiyellenebilen
matrisler, h homotetik bir katsayı ve Β = hA olmak üzere,
F :M
→ &
x
→ y = F ( x) = Βx + C
(5.3.1)
diferensiyellenebilir fonksiyonuna M nin N üzerindeki homotetik hareketi denir. x(t )
eğrisi boyunca M nin birim normal vektör alanı ξ ve y (t ) eğrisi boyunca N nin birim
normal vektör alanı η olsun. Herhangi bir t 0 anında x0 noktası, M
ile N
manifoldunun değme noktası olduğundan bu noktalarda ξ 0 = ε 1η 0 olacaktır. Bundan
dolayı değme noktalarında
Bξ = ε 1hη
yazılabilir. Burada ε 1 manifoldların yönlendirmelerine bağlı bir işaret değeri olup,
ε 1 = 1 ise; M, N manifoldunun içinde, ε 1 = −1 ise; M, N manifoldunun dışında hareket
edecektir.
Diğer taraftan M manifoldu üzerindeki x(t ) eğrisi (5.3.1) ile verilen hareket denklemine
göre hareketli pole eğrisi olsun. Buna karşılık N manifoldu üzerindeki y (t ) eğrisi de
hareketli pol eğrisi olacaktır. x(t ) ve y (t ) eğrilerini kısalığın hatırı için, sırasıyla, (X)
ve (Y) ile göstereceğiz. (X) ve (Y) eğrilerinin değme noktalarında tanjant uzayları
çakışık olacağından
dY
dX
= B
dt
dt
olup eğer (X) birim hızlı eğri ise
dY
=h
dt
105
(5.3.2)
olacaktır. Yani hareketli ve sabit uzaydaki pol eğrileri farklı çizilme hızlarına sahiptir.
F, 1-parametreli homotetik hareketini oluştururken (X) ve (Y) pol eğrileri boyunca
{b1 ,b2 } ve {a1 , a2 }
vektör alan sistemlerini belirleyeceğiz. Dolayısıyla pol eğrileri
boyunca hareketli ve sabit olmak üzere {b1 ,b2 , ε 1ξ } ve {a1 , a 2 ,η } ortonormal vektör
alanlarını elde etmiş olacağız. {b1 , b2 , ξ } ortonormal vektör alanlarını (X) eğrisinin
karakterine göre Frenet vektörlerinden ve
{T , ξ , ξΛT }
{
ortonormal sisteminden
}
yararlanarak tanımlayalım. ξ ∈ Sp{T , & , B} ve η ∈ Sp T , & , B için,
ξ (t ) = λ & + µ B ve η (t ) = λ & + µ B
(5.3.3)
yazabiliriz.
vii) M bir timelike manifold ve (X) eğrisi timelike ise;
Bu durumda, (X) timelike eğrisinin Frenet vektörleri {T , & , B} olmak üzere (3.4.1)
eşitliğinden T ′ = k1 & , & ′ = k1T + k 2 B ve B ′ = − k 2 &
olacaktır. M nin birim normal
vektör alanı spacelike olduğundan, ξΛT spacelike vektör alanı olacaktır. O halde
BΛ& = T , TΛB = − & ve TΛ& = B olup (5.3.3) eşitliği T ile vektörel olarak çarpılırsa
ξ , ξ = 1 olmak üzere,
ξΛT = µ & − λ B
(5.3.4)
ε 1ξΛT ε 1 µ − ε 1λ 0 &
ε ξ = ε λ ε µ 0 B
1
1 1
T 0
0
1 T
1442443
(5.3.5)
ve buradan da Q matrisi,
Q
(3.2.1) eşitliğinden,
& k 21 k 22 k 23 e1
B = k
31 k 32 k 33 e2
T k11 k12 k13 − e3
1442443
(5.3.6)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
hiperbolik dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
106
b2 ε 1 cosh θ 0 ε 1 sinh θ ε 1ξΛT
ε ξ =
ε ξ
0
1
0
1
1
b1 ε 1 sinh θ 0 ε 1 cosh θ T
14444244443
(5.3.7)
R
eşitliği vardır. (5.3.5) , (5.3.6) ve (5.3.7) eşitlikleri kullanılarak,
b2 e1
[1
P ] [Q ] [R ] ε 1ξ = e2
442443
A1
b1 − e3
−1
−1
−1
(5.3.8)
elde edilir. Diğer taraftan (5.3.8) eşitliği kullanılarak,
b2
e1
d dA −1
e2
ξ =
dt
dt
− e3
b1
dA1−1
ve W1 =
A1 olmak üzere (5.3.8) eşitliği de kullanılırsa,
dt
λk1 sinh θ +
db2
θ ′ + ε 1 µk1
0
dt
ε 1 (k 2 + λµ ′ − λ ′µ ) cosh θ
b2
dε ξ λk sinh θ +
λk1 cosh θ +
1
1
= −
0
ε 1ξ
dt ε 1 (k 2 + λµ ′ − λ ′µ ) cosh θ
ε 1 (k 2 + λµ ′ − λ ′µ ) sinh θ b
db1
1
λk1 cosh θ +
dt
′ + ε 1 µk1
0
θ
′ ′
ε4
1 (k 2 + λµ − λ µ ) sinh θ
4444444444444
1
4442444444444444444443
W1
(5.3.9)
elde edilir. θ = 0 ve ε 1 = 1 özel durumunda, ρ g , ρ n ve τ g (X) eğrisinin sırasıyla,
geodezik eğriliği, normal eğriliği ve geodezik burulması olmak üzere ρ g = µk1 ,
ρ n = λk1 ve τ g = −(k 2 + λµ ′ − λ ′µ ) bulunur. Dolayısıyla (X) eğrisinin açısal hız
vektörü vektörü
ω1 = −(k 2 + λµ ′ − λ ′µ )T + λk1ξΛT + µk1ξ
bulunur (Uğurlu 1996).
Sonuç 5.3.1: θ ′ + ε 1 µk1 = 0 ise b1 ve b2 vektör alanları (X) spacelike eğrisi boyunca
paralel vektör alanlarıdır.
107
İspat : E13 ’ün Riemann koneksiyonu ∇ , M üzerinde Gauss anlamında kovaryant türev
operatörü de ∇ ve M nin şekil operatörü S M olsun. Hareketin her t anında b1 (t ) ve
ξ (t ) vektör alanları (5.3.5) ve (5.3.7) eşitliklerinden
b1 = ε 1 cosh θ T + µ sinh θ & − λ sinh θ B ve ξ = λ & + µ B
olduğunu biliyoruz.
∇ T b1 = ∇ T b1 + S M (T ), b1 ξ
= ∇ T (ε 1 cosh θ T + µ sinh θ & − λ sinh θ B)
+ ∇T (λ & + µ B) , ε 1 coshθ T + µ sinhθ & − λ sinhθ B (λ & + µ B)
(ε k + θ ′µ ) cosh θ +
(µk1 − λ ′)sinh θ
= {ε 1θ ′ + k1 µ }sinh θ T + 1 1
& +
B
′
′
(
k
+
)
sinh
λ
µ
θ
−
θ
λ
cosh
θ
2
− ε λk cosh θ +
− ε 1λk1 cosh θ +
+ λ 1 1
& + µ
B
(µλ ′ − λµ ′ − k 2 ) sinh θ
(µλ ′ − λµ ′ − k 2 ) sinh θ
ε 1 k1 + θ ′µ
µk1 − λ ′
cosh θ +
2
2
sinh θ
− ε 1λ k1
+ µ λ ′
= {ε 1θ ′ + k1 µ }sinh θ T +
& +
B
′
−
−
k
λµ
µ
µ
′
′
k
+
+
λ
µ
µλ
λ
2
2
sinh θ
− λ2 µ ′ − λk
− (θ ′ + ε µk )λ cosh θ
2
1
1
(θ ′ + ε 1 µk1 )µ cosh θ +
− λ (λλ ′ + µµ ′) sinh θ
= {ε 1θ ′ + k1 µ }sinh θ T +
& +
B
µ (λλ ′ + µµ ′)sinh θ
− (θ ′ + ε 1 µk1 )λ cosh θ
ξ , ξ = 1 eşitliğinden λλ ′ + µµ ′ = 0 bulunur. θ ′ + ε 1 µk1 = 0 olduğu da kullanılırsa
∇ T b1 = 0 bulunur. Benzer şekilde ∇ T b2 = 0 olduğu da gösterilebilir.
(Y) timelike eğrisinin Frenet vektörleri
{T , & , B}
ve
T , T = −1
& , & = 1,
B, B = 1 olmak üzere (Y) eğrisinin Frenet formülleri T ′ = k 1 & , & ′ = k 1 T + k 2 B ve
B ′ = −k 2 & olacaktır. N manifoldunun birim normal vektör alanı spacelike olduğundan
ηΛT
spacelike vektör alanı olacaktır. O halde
T Λ & = B olup olacaktır. O halde
108
BΛ & = T , T Λ B = − &
ve
ηΛT µ − λ 0 &
η = λ µ 0 B
T 0 0 1 T
1
4
4244
3
(5.3.10)
Q
{
}
olup T , η , ηΛT ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1) den,
& k 21 k 22 k 23 e1
B = k 31 k 32 k 33 e2
T k 11 k 12 k 13 − e3
1
442443
(5.3.11)
P
{
}
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , ηΛT arasındaki dönme açısı hiperbolik dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a 2 cosh θ 0 sinh θ ηΛT
η = 0
1
0
η
a1 sinh θ 0 cosh θ T
44424443
1
(5.3.12)
R
ve (5.3.10), (5.3.11) ve (5.3.12) eşitlikleri kullanılırsa,
a 2 e1
P Q R η = e 2
144244
3
A2
a1 − e3
[] [] []
−1
−1
−1
elde edilir. (5.3.8) ve (5.3.13) eşitliklerinden,
A = A2 A1−1 yazabiliriz. (5.3.13)
eşitliğinden
a 2
e1
d dA2−1
e2
η =
dt
dt
− e3
a1
ve W2 =
dA2−1
A2 olmak üzere,
dt
109
(5.3.13)
λ k 1 sinhθ +
0
θ ′ + µk1
da2
k 2 + λ µ ′ − λ ′µ coshθ
dt
a
dη
λ k 1 sinhθ +
λ k 1 coshθ +
2
= −
0
η
dt k 2 + λ µ ′ − λ ′µ coshθ
k 2 + λ µ ′ − λ ′µ sinhθ
a1
da1
λ k 1 coshθ +
dt
0
θ ′ + µk1
2 + λ µ ′ − λ ′µ sinhθ
4444444444444k4
1
44
4244444444444444444
3
(
(
)
)
(
(
)
)
W2
(5.3.14)
elde edilir. θ = 0 özel durumunda, ρ g , ρ n ve τ g (Y) eğrisinin sırasıyla, geodezik
eğriliği, normal eğriliği ve geodezik burulması olmak üzere ρ g = µ k 1 , ρ n = λ k 1 ve
(
)
τ g = − k 2 + λ µ ′ − λ ′µ bulunur. Dolayısıyla (Y) eğrisinin açısal hız vektörü vektörü
(
)
ω 2 = − k 2 + λ µ ′ − λ ′µ T + λ k 1ηΛT + µ k 1η
bulunur (Uğurlu 1996).
Sonuç 5.3.2: θ ′ + µ k 1 = 0 ise a1 (t ) ve a 2 (t ) vektör alanlarının (Y) spacelike eğrisi
boyunca paralel vektör alanlarıdır.
İspat : E13 ün Riemann koneksiyonu ∇ , N üzerinde Gauss anlamında kovaryant türev
operatörü de ∇ ve N manifoldunun şekil operatörü S & olsun. Hareketin her t anında
a1 (t ) ve η (t ) vektör alanları (5.3.10) ve (5.3.12) eşitliklerinden
a1 = cosh θ T + µ sinh θ & − λ sinh θ B ve η (t ) = λ & + µ B
olduğunu biliyoruz.
∇ T a1 = ∇ T a1 + S & (T ), a1 η
= ∇ T (cosh θ T + µ sinh θ & − λ sinh θ B)
(
)
(
+ ∇ T λ & + µ B , cosh θ T + µ sinh θ & − λ sinh θ B λ & + µ B
(
)
(
)
)
k 1 + θ ′µ cosh θ
µ k 2 − λ ′ sinh θ
= θ ′ + k 1 µ sinh θ T +
& +
B
+ λ k 2 + µ ′ sinh θ
− θ ′λ cosh θ
{
}
(
)
− λ k 1 cosh θ +
− λ k 1 cosh θ +
+ λ
& + µ
B
µ λ ′ − λ µ ′ − k 2 sinh θ
µ λ ′ − λ µ ′ − k 2 sinh θ
(
)
(
110
)
k 1 + θ ′µ
cosh θ +
2
− λ k 1
µ 2 λ ′ − λ µ µ ′ − λ ′ sinh θ
= θ ′ + k 1 µ sinh θ T +
& +
B
− θ ′λ + µ λ k 1 cosh θ
µ λ λ ′ + λ µ ′
sinh θ
2
− λ µ ′ + µ ′
{
(
}
(
)
(
(
)
)
)
)
λ λ ′ + µ µ ′ λ sinh θ
θ ′ + µ k 1 µ cosh θ
= θ ′ + k 1 µ sinh θ T +
& −
B
+ θ ′ + µ k 1 λ cosh θ
+ λ λ ′ + µ µ ′ µ sinh θ
{
}
(
)
(
η ,η = 1 eşitliğinden λ λ ′ + µ µ ′ = 0 bulunur. θ ′ + µ k 1 = 0 olduğu da kullanılırsa
∇ T a1 = 0 bulunur. Benzer şekilde ∇ T a 2 = 0 olduğu da gösterilebilir.
→ Sp{η }
Diğer taraftan (5.1.16), (5.3.9) ve (5.3.14) eşitlikleri kullanılarak, S : TY ( t ) &
[ ]
lineer dönüşümünü temsil eden S = s ij
3x 3
matrisi, s11 = s 22 = s 33 = 0 , s12 = − s 21 ,
s13 = s 31 ve s 23 = s32 olmak üzere
λk1 sinh θ +
λk1 cosh θ +
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
s12 =
a
,
e
a
,
e
+
−
2 3
1 3
−θ ′ − µk1
− λ k 1 sinh θ −
− λ k 1 cosh θ −
k 2 + λ µ ′
k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
λk1 sinh θ +
λk1 cosh θ +
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
s13 =
a
,
e
−
a 2 , e3 +
1 3
k
k
−
−
λ
λ
1 sinh θ −
1 cosh θ −
′
−
−
k
θ
µ
1
k 2 + λ µ ′
k 2 + λ µ ′
sinh θ
cosh θ
− λ ′µ
− λ ′µ
111
s 23
λk1 sinh θ +
λk1 cosh θ +
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
= −
a1 , e3 −
a 2 , e3 +
λ
λ
−
k
−
k
1 sinh θ −
1 cosh θ −
′
θ
µ
−
−
k
1
k 2 + λ µ ′
k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
(5.3.15)
olacaktır. Dolayısıyla W ∈ Sp{a1 , a 2 , η } hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
λk1 sinhθ +
λk1 coshθ +
ε1 (k2 + λµ′ − λ ′µ) coshθ ε1 (k2 + λµ′ − λ ′µ) sinhθ
W P =
a1 −
a2 + θ ′ + ε1µk1 −θ ′ − µk 1 η
− λk 1 sinhθ −
− λk 1 coshθ −
k 2 + λµ′ − λ′µ coshθ k 2 + λµ′ − λ′µ sinhθ
P
(
(
)
(
)
)
(5.3.16)
şeklinde olacaktır.
Teorem 5.3.1: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) timelike eğrileri
boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir homotetik
hareket olması için gerekli ve yeterli şart θ ′ + ε 1 µk1 − θ ′ − µ k 1 = 0 olmasıdır.
Sonuç 5.3.3: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) timelike eğrileri
boyunca birer paralel vektör alanı sistemi
b2 = hB −1 a 2
ve ε 1ξ = hB −1η
ise değme noktalarında b1 = hB −1 a1 ,
olacak şekilde tanımlanan
M ve N timelike
manifoldlarının, F hareketi bir homotetik harekettir.
Sonuç 5.3.4: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) timelike geodezik
eğrileri boyunca paralel vektör alanları ise θ
θ = θ ’dir.
112
ve θ hareket boyunca sabit olup
Sonuç 5.3.5: {b1 , b2 } ve {a1 , a 2 } vektör alanları sırasıyla (X) ve (Y) düzlemsel timelike
eğrileri boyunca birer paralel vektör alanı sistemi ve λ = λ = 0 ise F hareketi sadece
kayma hareketidir.
İspat: {b1 , b2 } ve
{a1 , a2 }
vektör alanları, sırasıyla, (X) ve (Y) timelike eğrileri
boyunca birer paralel vektör alanı ise
θ ′ + ε 1 µk1 − θ ′ − µ k 1 = 0
olur. (X) ve (Y) düzlemsel eğriler ve λ = λ = 0 ise (5.3.16)’dan P değme noktalarında,
W
P
= 0 olacaktır. Dolayısıyla S=0 ve (3.5.7) eşitliğinden hareket sadece kaymadan
ibaret olur.
Teorem 5.3.2: F, timelike manifoldların, timelike eğriler boyunca homotetik hareketi
esnasında, (X) ve (Y) timelike eğrileri boyunca M nin ve N nin şekil operatörleri,
sırasıyla, S M ve S & olsun. Eğer
dX
dY
BS M
= S&
dt
dt
ise F hareketi sadece bir kayma hareketidir. Bu durumda (5.3.16) ile verilen Darboux
vektörü sıfır vektörü olacaktır.
İspat : (X) ve (Y) eğrileri boyunca,
dX dε 1ξ
dY dη
ve h −1 S &
SM
=
=
dt
dt
dt dt
olup (5.3.9) eşitliğinden
ελk1 cosh θ −
ελk1 sinh θ −
dε 1ξ
= −
b1 +
b
εε 1 (εk 2 + λµ ′ − λ ′µ )sinh θ
εε 1 (εk 2 + λµ ′ − λ ′µ ) cosh θ 2
dt
1444442444443
144444244444
3
u1
u2
b1 = hB −1 a1 , b2 = hB −1 a 2 ve ξ = ε 1 hB −1η olduğundan
dε ξ
h −1 B 1 = u1 a1 + u 2 a 2
dt
(5.3.14) eşitliğinden,
113
ε λ k 1 cosh θ −
ε λ k 1 sinh θ −
dη
=−
a1 +
a 2
dt
ε ε k 2 + λ µ ′ − λ ′µ sinh θ
ε ε k 2 + λ µ ′ − λ ′µ cosh θ
1444442444443
14444
4244444
3
(
)
(
v1
)
v2
dε ξ dη
yazabiliriz. h −1 B 1 =
olduğundan ve hipotezden,
dt dt
u1 = v1 ve u 2 = v 2 elde
eşitliklerinde yerlerine yazılırsa S = 0 ve
edilir. Bu eşitlikler (5.3.15) ve (5.3.16)
dolayısıyla W = 0 bulunur. Dolayısıyla (3.5.7) eşitliğinden
(t ) ⇒ H (t ) = ϕ (t ) .
H (t ) = ϕ (t ) + S{
=0
O halde F hareketi sadece bir kaymadan ibaret olur.
Sonuç 5.3.6: F, timelike manifoldların, timelike eğriler boyunca bir homotetik hareketi
ise, M ve N nin şekil operatörleri arasında,
dX
dY
BS M
≠ S&
dt
dt
bağıntısı vardır.
Sonuç 5.3.7: M ve N timelike manifoldların birbiri üzerinde 1-parametreli homotetik
hareket yapması için, M ve N üzerindeki (X) ve (Y) timelike eğrilerinin hiçbiri M nin ve
N nin flat noktalarından geçmemesi gerekir.
Sonuç 5.3.8: F bir homotetik hareket, (X) ve (Y) timelike eğrileri, sırasıyla, M ve N
timelike manifoldları üzerinde birer eğrilik çizgisi ve λ , k1 , λ , k 1 ayrı ayrı sabit ise
θ ′ − θ ′ = εµk1 − µ k 1 = sabit ’dir. Özel olarak µ = µ = 0 ise (X) ve (Y) timelike
geodezik eğrilik çizgisidir.
Sonuç 5.3.9: M herhangi bir timelike manifold ve N timelike düzlem ise, bölüm 5.2–(ii)
de verilen sonuçlar elde edilir.
114
viii)
M bir timelike manifold ve (X) eğrisi spacelike olsun.
Bu durumda η birim normal vektör alanı ve (Y) eğrisi de spacelike olacaktır. (X) eğrisi
için (3.4.2), (3.4.3) eşitlikleri ve BΛ& = T , TΛB = & , TΛ& = B eşitlikleri kullanılır ve
(5.3.3) eşitliği T ile vektörel olarak çarpılırsa ξ , ξ = 1 olmak üzere,
ξΛT = − µ & − λ B
(5.3.17)
vektörü λ = µ için lightlike diğer durularda timelike vektör olacaktır. O halde
{ξ , T , ξΛT }
ortonormal sistemindeki vektör alanları için, sırasıyla, spacelike,
spacelike, timelike veya spacelike, spacelike, lightlike karakterleri söz konusu olacaktır.
a) ξΛT timelike ise;
(X) eğrisi spacelike olduğundan {T , & , B} Frenet vektörleri ve &, & = ε , B, B = −ε
olmak üzere (3.4.2) ve (3.4.3) eşitliklerinden iki durum söz konusudur.
a1) (X) pol eğrisinin asli normal vektör alanı timelike olsun.
Bu durumda & , & = − B, B = −1 , µ 2 − λ2 = 1 ve µµ ′ − λλ ′ = 0 eşitliklerini
kullanabiliriz. Ayrıca (5.3.3) ve (5.3.17) eşitliklerinden,
1
0 B
T 0
ε ξ = ε µ 0 ε λ T
1
1 1
ε 1ξΛT − ε 1λ 0 − ε 1 µ &
14442444
3
(5.3.18)
Q
(3.2.1) eşitliğinden,
B k 31 k 32 k 33 e1
T = k
11 k12 k13 e2
k 21 k 22 k 23 − e3
& 1
442443
(5.3.19)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
hiperbolik dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
115
b1 ε 1 cosh θ 0 ε 1 sinh θ T
ε ξ =
ε ξ
0
1
0
1
1
b2 ε 1 sinh θ 0 ε 1 cosh θ ε 1ξΛT
14444244443
(5.3.20)
R
eşitliği vardır. (5.3.18) , (5.3.19) ve (5.3.20) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] ε 1ξ = e2
442443
A1
b2 − e3
−1
−1
−1
(5.3.21)
elde edilir. Diğer taraftan (5.3.21) eşitliği kullanılarak,
b1
e1
d dA1−1
e2
ε 1ξ =
dt
dt
− e3
b2
dA1−1
W1 =
A1 olmak üzere (5.3.21) eşitliği de kullanılırsa,
dt
− λk1 coshθ +
db1
θ ′ − ε 1 µk1
0
dt
ε1 (− k 2 + λµ ′ − λ ′µ ) sinhθ
b1
d (ε ξ ) − λk coshθ +
λ
θ
−
sinh
+
k
1
1
1 = −
0
ε 1ξ
dt ε 1 (− k 2 + λµ ′ − λ ′µ ) sinhθ
ε 1 (− k 2 + λµ ′ − λ ′µ ) coshθ b
db2
λ
θ
−
k
sinh
+
2
1
dt
′ − ε 1µk1
θ
0
ε 1 (− k 2 + λµ ′ − λ ′µ ) coshθ
44444444444444
1
4444
424444444444444444444
3
W1
(5.3.22)
elde edilir. Diğer taraftan (Y) eğrisi için de iki durum söz konusudur. Bunlara göre, A2
ve W2 matrislerini oluşturalım.
1. (Y) pol eğrisinin asli normal vektör alanı timelike olsun.
Bu durumda
& , & = − B, B = −1 ,
2
2
µ − λ = 1 ve µ µ ′ − λ λ ′ = 0 eşitliklerini
kullanabiliriz. Ayrıca (5.3.3) eşitliklerinden,
T 0 1 0 B
η = µ 0 λ T
ηΛT − λ 0 − µ &
442443
1
(5.3.23)
Q
{
}
olup T , η , ηΛT ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1) den,
116
B k 31 k 32 k 33 e1
T = k 11 k 12 k 13 e2
& k 21 k 22 k 23 − e3
1
442443
(5.3.24)
P
{
}
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , ηΛT arasındaki dönme açısı hiperbolik dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cosh θ 0 sinh θ T
η = 0
1
0 η
a 2 sinh θ 0 cosh θ ηΛT
144424443
(5.3.25)
R
ve (5.3.23), (5.3.24) ve (5.3.25) eşitlikleri kullanılırsa,
a1 e1
P Q R η = e 2
144244
3
A2
a 2 − e3
[] [] []
−1
−1
−1
(5.3.26)
A = A2 A1−1
elde edilir. (5.3.21) ve (5.3.26) eşitliklerinden,
yazabiliriz. (5.3.26)
eşitliğinden
a1
e1
d dA2−1
e2
η =
dt
dt
− e3
a 2
ve W2 =
dA2−1
A2 olmak üzere,
dt
− λk 1 coshθ +
θ ′ − µk 1
0
da1
− k 2 + λ µ ′ − λ ′µ sinhθ
dt
a
dη
− λk 1 coshθ +
− λk 1 sinhθ +
1
= −
0
η
dt − k 2 + λ µ ′ − λ ′µ sinhθ
− k 2 + λ µ ′ − λ ′µ coshθ
a2
da2
λ
θ
−
+
k
sinh
1
dt
θ ′ − µk 1
0
− k 2 + λ µ ′ − λ ′µ coshθ
144444444444444444
42444444444444444444
3
(
(
)
)
(
(
)
)
W2
(5.3.27)
elde edilir. Diğer taraftan (5.1.16),
S : TY ( t ) &
→ Sp{η }
lineer
(5.3.22) ve (5.3.27) eşitlikleri kullanılarak,
dönüşümünü
temsil
eden
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
117
[ ]
S = s ij
3x 3
matrisi,
− λk1 sinh θ +
− λk1 cosh θ +
ε − k 2 + λµ ′ cosh θ
ε − k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ − ε 1 µk1
η , e3
s12 = −
a1 , e3 +
a 2 , e3 +
λ
λ
k
k
+
+
1 sinh θ −
1 cosh θ −
′
θ
µ
k
−
+
1
− k 2 + λ µ ′
− k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
− λk1 sinh θ +
− λk1 cosh θ +
ε − k 2 + λµ ′ cosh θ
ε − k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ − ε 1 µk1
η , e3
s13 = −
a1 , e3 +
a 2 , e3 +
+
k
k
+
λ
λ
1 sinh θ −
1 cosh θ −
′
k
−
+
θ
µ
1
− k 2 + λ µ ′
− k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
− λk1 sinh θ +
− λk1 cosh θ +
ε − k 2 + λµ ′ cosh θ
ε − k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
s 23 =
a1 , e3 −
+ λ k 1 sinh θ −
+ λ k 1 cosh θ −
− k 2 + λ µ ′
− k 2 + λ µ ′
sinh θ
cosh θ
− λ ′µ
− λ ′µ
olacaktır. Dolayısıyla W ∈ Sp{a1 , a 2 , η }
θ ′ − ε 1 µk1
a 2 , e3 −
η , e3
−θ ′ + µk1
(5.3.28)
hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
− λk1 sinhθ +
− λk1 coshθ +
ε1 (− k2 + λµ′ − λ′µ) coshθ ε1 (− k2 + λµ′ − λ ′µ) sinhθ
W P = −
a1 +
a2 + θ ′ − ε1µk1 −θ ′ + µk 1 η
+ λk 1 sinhθ −
+ λk 1 coshθ −
− k 2 + λµ′ − λ′µ coshθ − k 2 + λµ′ − λ′µ sinhθ
P
(
(
)
(
)
)
(5.3.29)
şeklinde olacaktır.
2. (Y) pol eğrisinin asli normal vektör alanı spacelike olsun.
2
2
Bu durumda − & , & = B, B = −1 , λ − µ = 1 ve µ µ ′ − λ λ ′ = 0 eşitliklerini
kullanabiliriz. Ayrıca (5.3.3) eşitliklerinden,
118
T
η =
ηΛT
0 1 0 &
λ 0 µ T
− µ 0 − λ B
1
442443
(5.3.30)
Q
{
}
olup T , η , ηΛT ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1) den,
& k 21 k 22 k 23 e1
T = k 11 k 12 k 13 e2
B k 31 k 32 k 33 − e3
1
442443
(5.3.31)
P
{
}
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , ηΛT arasındaki dönme açısı hiperbolik dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cosh θ 0 sinh θ T
η = 0
1
0 η
a 2 sinh θ 0 cosh θ ηΛT
144424443
(5.3.32)
R
ve (5.3.30), (5.3.31) ve (5.3.32) eşitlikleri kullanılırsa,
a1 e1
P Q R η = e 2
144244
3
A2
a 2 − e3
[] [] []
−1
−1
−1
(5.3.33)
A = A2 A1−1
elde edilir. (5.3.21) ve (5.3.33) eşitliklerinden,
yazabiliriz. (5.3.33)
eşitliğinden
a1
∈1 e1
d dA2−1
∈2 e2
η =
dt
dt
∈3 e3
a 2
dA2−1
ve W2 =
A2 olmak üzere,
dt
λ k 1 cosh θ −
0
θ ′ + µk1
da 1
k 2 + λ µ ′ − λ ′µ sinh θ
dt
a
dη λ k 1 cosh θ −
λ k 1 sinh θ −
1
= −
0
η
dt k 2 + λ µ ′ − λ ′µ sinh θ
k 2 + λ µ ′ − λ ′ µ cosh θ
a 2
da 2
λ k 1 sinh θ −
dt
0
θ ′ + µk1
k 2 + λ µ ′ − λ ′µ cosh θ
14444444444444444
4244444444444444444
3
(
(
)
)
(
(
)
)
W2
(5.3.34)
119
Diğer
taraftan
(5.1.16),
S : TY ( t ) &
→ Sp{η }
lineer
(5.3.22)
ve
dönüşümünü
(5.3.34)
temsil
eşitlikleri
eden
kullanılarak,
[ ]
S = s ij
3x 3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
− λk1 sinh θ +
− λk1 cosh θ +
ε − k 2 + λµ ′ cosh θ
ε − k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ − ε 1 µk1
η , e3
s12 = −
a
,
e
+
1 3
a 2 , e3 +
−θ ′ − µk1
− λ k 1 sinh θ +
− λ k 1 cosh θ +
k 2 + λ µ ′
k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
− λk1 sinh θ +
− λk1 cosh θ +
ε − k 2 + λµ ′ cosh θ
ε − k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ − ε 1 µk1
η , e3
s13 = −
a
,
e
+
1 3
a 2 , e3 +
−θ ′ − µk1
− λ k 1 sinh θ +
− λ k 1 cosh θ +
k 2 + λ µ ′
k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
s 23
− λk1 sinh θ +
− λk1 cosh θ +
ε − k 2 + λµ ′ cosh θ
ε − k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
=
a1 , e3 −
− λ k 1 sinh θ +
− λ k 1 cosh θ +
k 2 + λ µ ′
k 2 + λ µ ′
sinh θ
cosh θ
− λ ′µ
− λ ′µ
θ ′ − ε 1 µk1
a 2 , e3 −
η , e3
−θ ′ − µk1
(5.3.35)
olacaktır. Dolayısıyla W ∈ Sp{a1 , a 2 , η } hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
− λk1 sinhθ +
− λk1 coshθ +
ε1 (− k2 + λµ′ − λ′µ) coshθ ε1 (− k2 + λµ′ − λ ′µ) sinhθ
W P = −
a2 + θ ′ − ε1µk1 −θ ′ − µk 1 η
a1 +
− λk 1 sinhθ +
− λk 1 coshθ +
k 2 + λµ′ − λ ′µ coshθ k 2 + λµ′ − λ′µ sinhθ
P
(
(
)
(
)
)
(5.3.36)
olarak elde edilir.
120
a2) (X) pol eğrisinin asli normal vektör alanı spacelike olsun.
Bu durumda − & , & = B, B = −1 , λ2 − µ 2 = 1 ve λλ ′ − µµ ′ = 0 eşitliklerini
kullanabiliriz. (5.3.3) ve (5.3.4) eşitliklerinden,
1
0 &
T 0
ε ξ = ε λ 0 ε µ T
1
1 1
ε 1ξΛT − ε 1 µ 0 − ε 1λ B
14442444
3
(5.3.37)
Q
(3.2.1) eşitliğinden,
& k 21 k 22 k 23 e1
T = k
11 k12 k13 e2
k 31 k 32 k 33 − e3
B 1
442443
(5.3.38)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
hiperbolik dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
b1 ε 1 cosh θ 0 ε 1 sinh θ T
ε ξ =
ε ξ
0
1
0
1
1
b2 ε 1 sinh θ 0 ε 1 cosh θ ε 1ξΛT
14444244443
(5.3.39)
R
eşitliği vardır. (5.3.37) , (5.3.38) ve (5.3.39) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] ε 1ξ = e2
442443
A1
b2 − e3
−1
−1
−1
elde edilir. Diğer taraftan (5.3.40) kullanılarak,
b1
e1
d dA −1
e2
ε 1ξ =
dt
dt
− e3
b2
dA1−1
ve W1 =
A1 olmak üzere (5.3.40) eşitliği de kullanılırsa,
dt
121
(5.3.40)
λk1 cosh θ −
db1
θ ′ + ε 1 µk1
0
′
′
ε
λ
µ
λ
µ
θ
(
)
k
+
−
sinh
dt
1 2
b1
dε ξ λk cosh θ −
λ
θ
k
sinh
−
1
1
1 = −
0
ε 1ξ
′
′
′
′
dt ε 1 (k 2 + λµ − λ µ ) sinh θ
ε 1 (k 2 + λµ − λ µ ) cosh θ b
db2
2
λk1 sinh θ −
dt
′ + ε 1 µk1
θ
0
′
′
1 (k 2 + λµ − λ µ ) cosh θ
ε4
14444444444444
444
42444444444444444444
3
W1
(5.3.41)
elde edilir. & , & = − B, B = ε olmak üzere (5.3.22) ve (5.3.41) eşitlikleri göz önüne
alınırsa şu sonucu verebiliriz.
Sonuç 5.3.10: θ ′ + εε 1 µk1 = 0 ise b1 ve b2 vektör alanları (X) spacelike eğrisi boyunca
paralel vektör alanlarıdır.
İspat : Sonuç 5.3.1 in ispatına benzer şekilde gösterilebilir.
1. (Y) pol eğrisinin asli normal vektör alanı timelike olsun.
2
2
Bu durumda & , & = − B, B = −1 , µ − λ = 1 ve µ µ ′ − λ λ ′ = 0 eşitliklerini
kullanabiliriz. Ayrıca (5.3.3) eşitliklerinden,
T 0 1 0 B
η = µ 0 λ T
ηΛT − λ 0 − µ &
442443
1
(5.3.42)
Q
{
}
olup T , η , ηΛT ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1) den,
B k 31 k 32 k 33 e1
T = k 11 k 12 k 13 e2
& k 21 k 22 k 23 − e3
1
442443
(5.3.43)
P
{
}
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , ηΛT arasındaki dönme açısı hiperbolik dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
122
a1 cosh θ 0 sinh θ T
η = 0
1
0 η
a 2 sinh θ 0 cosh θ ηΛT
144424443
(5.3.44)
R
ve (5.3.42), (5.3.43) ve (5.3.44) eşitlikleri kullanılırsa,
a1 e1
P Q R η = e 2
144244
3
A2
a 2 − e3
[] [] []
−1
−1
−1
(5.3.45)
A = A2 A1−1
elde edilir. (5.3.40) ve (5.3.45) eşitliklerinden,
yazabiliriz. (5.3.45)
eşitliğinden
a1
e1
d dA2−1
e2
η =
dt
dt
− e3
a 2
dA2−1
A2 olmak üzere,
ve W2 =
dt
− λ k 1 coshθ +
0
θ ′ − µk 1
da1
′
′
−
+
−
sinh
k
λ
µ
λ
µ
θ
2
dt
a
dη − λ k 1 coshθ +
− λ k 1 sinhθ +
1
= −
0
η
dt − k 2 + λ µ ′ − λ ′µ sinhθ
− k 2 + λ µ ′ − λ ′µ coshθ
a2
da2
−
+
k
sinh
λ
θ
1
dt
0
θ ′ − µk 1
− k 2 + λ µ ′ − λ ′µ coshθ
1
444444444444444442444444444444444443
(
(
)
)
(
(
)
)
W2
(5.3.46)
elde edilir.
Diğer taraftan (5.1.16),
S : TY ( t ) &
→ Sp{η }
lineer
(5.3.41) ve (5.3.46) eşitlikleri kullanılarak,
dönüşümünü
temsil
eden
[ ]
S = s ij
3x 3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
λk1 sinh θ −
λk1 cosh θ −
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
s12 = −
a 2 , e3 +
a1 , e3 +
k
+
k
+
λ
λ
1 sinh θ −
1 cosh θ −
′
k
−
+
θ
µ
1
− k 2 + λ µ ′
− k 2 + λ µ ′
sinh θ
cosh θ
− λ ′µ
− λ ′µ
123
λk1 sinh θ −
λk1 cosh θ −
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
s13 = −
a
,
e
+
a 2 , e3 +
1 3
k
k
+
+
λ
λ
1 sinh θ −
1 cosh θ −
′
−
+
k
θ
µ
1
− k 2 + λ µ ′
− k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
λk1 sinh θ −
λk1 cosh θ −
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
a
,
e
−
a
,
e
−
=
2 3
1 3
−θ ′ + µk1
+ λ k 1 sinh θ −
+ λ k 1 cosh θ −
− k 2 + λ µ ′
− k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
(5.3.47)
s 23
olacaktır. Dolayısıyla W ∈ Sp{a1 , a 2 , η } hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
λk1 sinhθ −
λk1 coshθ −
ε1 (k2 + λµ′ − λ′µ) coshθ
ε1 (k2 + λµ′ − λ′µ) sinhθ
W P = −
a1 +
a2 + θ ′ + ε1µk1 −θ ′ + µk 1 η
+ λk 1 sinhθ −
+ λk 1 coshθ −
− k 2 + λµ′ − λ′µ coshθ
− k 2 + λµ′ − λ′µ sinhθ
P
(
(
)
(
)
)
(5.3.48)
olarak elde edilir.
2. (Y) pol eğrisinin asli normal vektör alanı spacelike olsun.
2
2
Bu durumda − & , & = B, B = −1 , λ − µ = 1 ve µ µ ′ − λ λ ′ = 0 eşitliklerini
kullanabiliriz. Ayrıca (5.3.3) eşitliklerinden,
T
η =
ηΛT
0 1 0 &
λ 0 µ T
− µ 0 − λ B
1
442443
Q
124
(5.3.49)
{
}
olup T , η , ηΛT ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1) den,
& k 21 k 22 k 23 e1
T = k 11 k 12 k 13 e2
B k 31 k 32 k 33 − e3
1
442443
(5.3.50)
P
{
}
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , ηΛT arasındaki dönme açısı hiperbolik dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cosh θ 0 sinh θ T
η = 0
1
0 η
a 2 sinh θ 0 cosh θ ηΛT
144424443
(5.3.51)
R
ve (5.3.49), (5.3.50) ve (5.3.51) eşitlikleri kullanılırsa,
a1 e1
P Q R η = e 2
144244
3
A2
a 2 − e3
[] [] []
−1
−1
−1
(5.3.52)
elde edilir. b1 = hB −1 a1 , b2 = hB −1 a 2 ve η = hB −1e2 olduğundan (5.3.40) ve (5.3.52)
eşitliklerinden, A = A2 A1−1 yazabiliriz. (5.3.50) eşitliğinden
a1
e1
d dA2−1
e2
η =
dt
dt
− e3
a 2
dA2−1
ve W2 =
A2 olmak üzere,
dt
λ k 1 cosh θ −
′
θ
µ
0
+
k
1
da
1
k 2 + λ µ ′ − λ ′µ sinh θ
dt
a
dη λ k 1 cosh θ −
λ k 1 sinh θ −
1
= −
0
η
dt k 2 + λ µ ′ − λ ′µ sinh θ
k 2 + λ µ ′ − λ ′µ cosh θ
a 2
da 2
λ k 1 sinh θ −
dt
θ ′ + µk1
0
k 2 + λ µ ′ − λ ′µ cosh θ
14444444444444
444
4244444444444444444
3
(
(
)
)
(
(
)
)
W2
(5.3.53)
elde edilir.
& , & = − B, B = ε olmak üzere (5.3.27), (5.3.34), (5.3.46) ve (5.3.53)
eşitlikleri göz önüne alınırsa şu sonucu verelebiliriz.
125
Sonuç 5.3.11: θ ′ + ε µ k 1 = 0 ise a1 (t ) ve a 2 (t ) vektör alanlarının (Y) spacelike eğrisi
boyunca paralel vektör alanlarıdır.
İspat : Sonuç 5.3.2 in ispatına benzer şekilde gösterilebilir.
Diğer
taraftan
(5.1.16),
S : TY ( t ) &
→ Sp{η }
lineer
(5.3.41)
ve
dönüşümünü
(5.3.53)
temsil
eşitlikleri
eden
kullanılarak,
[ ]
S = s ij
3x3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
λk1 sinh θ −
λk1 cosh θ −
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
s12 = −
a1 , e3 +
a 2 , e3 +
−θ ′ − µk1
− λ k 1 sinh θ +
− λ k 1 cosh θ +
k 2 + λ µ ′
k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
λk1 sinh θ −
λk1 cosh θ −
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
s13 = −
a1 , e3 +
a 2 , e3 +
k
−
k
−
λ
λ
1 sinh θ +
1 cosh θ +
′
−
−
k
θ
µ
1
k 2 + λ µ ′
k 2 + λ µ ′
cosh θ
sinh θ
− λ ′µ
− λ ′µ
λk1 sinh θ −
λk1 cosh θ −
ε k 2 + λµ ′ cosh θ
ε k 2 + λµ ′ sinh θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
a
,
e
=
−
a 2 , e3 −
1 3
−θ ′ − µk1
− λ k 1 sinh θ +
− λ k 1 cosh θ +
k 2 + λ µ ′
k 2 + λ µ ′
sinh θ
cosh θ
− λ ′µ
− λ ′µ
s 23
(5.3.54)
olacaktır. Dolayısıyla, W ∈ Sp{a1 , a 2 , η } hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
126
λk1 sinhθ −
λk1 coshθ −
ε1 (k2 + λµ′ − λ′µ) coshθ
ε1 (k2 + λµ′ − λ′µ) sinhθ
W P = −
a1 +
a2 + θ ′ + ε1µk1 −θ ′ − µk 1 η
− λk 1 sinhθ +
− λk 1 coshθ +
k 2 + λµ′ − λ ′µ coshθ
k 2 + λµ′ − λ ′µ sinhθ
P
(
(
)
(
)
)
(5.3.55)
olarak elde edilir. (5.3.29), (5.3.36), (5.3.48) ve (5.3.55) eşitliklerini genelleştirmek
gerekirse,
ελ k1 sinhθ −
ελ k1 coshθ −
εε (εk + λµ ′ − λ′µ) sinhθ
εε1 (εk2 + λµ ′ − λ ′µ) coshθ
1 2
W P = −
a1 +
a2 + θ ′ + εε1µk1 −θ ′ − ε µk 1 η
− ε λk 1 sinhθ +
− ε λk 1 coshθ +
ε ε k 2 + λµ′ − λ ′µ coshθ
ε ε k 2 + λµ′ − λ ′µ sinhθ
P
(
(
)
(
)
)
(5.3.56)
olacaktır.
Sonuç 5.3.12: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) spacelike eğrileri
boyunca paralel vektör alanları iseler, değme noktalarında b1 = hB −1 a1 , b2 = hB −1 a 2 ve
ε 1ξ = hB −1η olacak şekilde tanımlanan M ve N timelike manifoldların F hareketi bir
homotetik harekettir.
Teorem 5.3.3: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike
eğrileri boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir
homotetik hareket olması için gerekli ve yeterli şart θ ′ + εε 1 µk1 − θ ′ − ε µ k 1 = 0
olmasıdır.
Sonuç 5.3.13: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike
eğrileri boyunca birer paralel vektör alanı sistemi ise değme noktalarında b1 = hB −1 a1 ,
b2 = hB −1 a 2 ve ε 1ξ = hB −1η olacak şekilde tanımlanan
harekettir.
127
F hareketi bir homotetik
Sonuç 5.3.14: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) spacelike geodezik
eğrileri boyunca paralel vektör alanları ise θ
ve θ hareket boyunca sabit olup
θ = θ ’dir.
Sonuç 5.3.15: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) düzlemsel
spacelike eğrileri boyunca birer paralel vektör alanı sistemi ve λ = λ = 0 ise, F hareketi
sadece kayma hareketidir.
İspat: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike eğrileri
boyunca birer paralel vektör alanı ise,
θ ′ + εε 1 µk1 − θ ′ − ε µ k 1 = 0
olur. (X) ve (Y) düzlemsel eğriler ve λ = λ = 0 ise (5.3.56)’dan P değme noktalarında,
W
P
= 0 olacaktır. Dolayısıyla S=0 ve (3.5.7) eşitliğinden hareket sadece kaymadan
ibaret olur.
Teorem 5.3.4: F, timelike manifoldların spacelike eğriler boyunca homotetik hareketi
esnasında, (X) ve (Y) spacelike eğrileri boyunca M ve N nin şekil operatörleri,
sırasıyla, S M ve S & olsun. Eğer
dX
dY
BS M
= S&
dt
dt
ise F hareketi sadece bir kayma hareketidir. Bu durumda (5.3.56) ile verilen Darboux
vektörü sıfır vektörü olacaktır.
İspat : Teorem 5.3.2 nin ispatına benzer şekilde ispatlanabilir.
Sonuç 5.3.16: F, timelike manifoldların, spacelike eğriler boyunca bir homotetik
hareketi ise, M ve N manifoldlarının şekil operatörleri arasında
dX
dY
BS M
≠ S&
dt
dt
bağıntısı vardır.
128
Sonuç 5.3.17: M ve N timelike manifoldlarının birbiri üzerinde 1-parametreli homotetik
hareket yapması için, M ve N üzerindeki (X) ve (Y) spacelike eğrilerinin hiçbiri M nin
ve N nin flat noktalarından geçmemesi gerekir.
Sonuç 5.3.18: F bir homotetik hareket, (X) ve (Y) timelike eğrileri, sırasıyla, M ve N
timelike manifoldları üzerinde birer eğrilik çizgisi ve λ , k1 , λ , k 1 ayrı ayrı sabit ise
θ ′ − θ ′ = εε 1 µk1 − ε µ k 1 = sabitir. Özel olarak µ = µ = 0 ise (X) ve (Y) spacelike
geodezik eğrilik çizgisidir.
Sonuç 5.3.19: M herhangi bir timelike manifold ve N timelike düzlem ise, bölüm 5.2 –
(i) de verilen sonuçlar elde edilir.
b) ξΛT lightlike ise;
Bu durumda λ = µ
olacağından uygun bir Q ∈ SO1 (3) matrisi oluşturulamaz.
Dolayısıyla F : M
→ & olacak şekilde bir homotetik hareket tanımlanamaz.
ix) M bir timelike manifold ve (X) eğrisi lightlike olsun.
(X) lightlike eğrisinin Frenet vektörleri {T , & , B} ve T, N lightlike ve B timelike veya
spacelike olmak üzere iki durum söz konusudur. Fakat bunların hiçbirisi için {T , & , B}
sistemi bir ortonormal sistem oluşturmadığından P ∉ SO1 (3) olacaktır. Dolayısıyla bir
homotetik hareket denklemi oluşturulamaz.
x) M bir spacelike manifold ve (X) eğrisi spacelike olsun.
(X) eğrisi spacelike olduğundan {T , & , B} Frenet vektörleri ve &, & = ε , B, B = −ε
olmak üzere (3.4.2) ve (3.4.3) eşitliklerinden iki durum söz konusudur.
129
a) (X) pol eğrisinin asli normal vektör alanı timelike olsun.
Bu durumda
λ2 − µ 2 = 1 ve λλ ′ − µµ ′ = 0 eşitliklerini
& , & = − B , B = −1 ,
kullanabiliriz.
1
0 B
T 0
ε ξΛT = − ε λ 0 − ε µ T
1
1
1
ε 1ξ ε 1 µ 0 ε 1λ &
14442444
3
(5.3.57)
Q
(3.2.1) eşitliğinden,
B k 31 k 32 k 33 e1
T = k
11 k12 k13 e2
k 22 k 23 − e3
& 1
k 21
442
443
(5.3.58)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
b1 ε 1 cos θ ε 1 sin θ 0 T
b = − ε sin θ ε cos θ 0 ε ξΛT
1
2 1
1
ε 1ξ
0
0
1 ε 1ξ
1444424444
3
(5.3.59)
R
eşitliği vardır. (5.3.57) , (5.3.58) ve (5.3.59) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] b2 = e2
442443
A1
ε 1ξ − e3
−1
−1
−1
elde edilir. Diğer taraftan (5.3.60) eşitliği kullanılarak,
b1
e1
d dA −1
e2
b2 =
dt
dt
− e3
ε 1ξ
dA1−1
ve W1 =
A1 olmak üzere (5.3.60) eşitliği de kullanılırsa,
dt
130
(5.3.60)
λk1 cos θ −
db1
θ ′ + ε 1 µk1
0
dt
ε 1 (k 2 + λµ ′ − λ ′µ ) sin θ b
1
db
λk sin θ +
2 =
0
b
− θ ′ − ε 1 µk1
− 1
2
dt
ε 1 (k 2 + λµ ′ − λ ′µ ) cos θ ε ξ
dε 1ξ λk cos θ −
1
λk1 sin θ +
dt 1
0
−
′
′
ε (k + λµ ′ − λ ′µ ) cos θ
1 (k 2 + λµ − λ µ ) sin θ
ε4
1
4444444444441 42444244444
4444444444443
W1
(5.3.61)
elde edilir.
a1) (Y) pol eğrisinin asli normal vektör alanı timelike olsun.
{
}
(Y) spacelike eğrisi için Frenet çatısı T , & , B
{a1 , a 2 ,η}
olmak üzere, (Y) eğrisi boyunca
ortonormal vektörlerini bulalım. (Y) eğrisi boyunca N manifoldunun birim
normal vektör alanı η spacelike vektörü ile & dik olacağından & timelike ve bundan
dolayı da B spacelike vektör olacaktır. Böylece düzlemsel (Y) spacelike eğrisi için
T ′ = k 1 & , & ′ = k 1 T olacaktır. O halde e2 = B ve e2 ΛT = & alınarak,
T
ηΛT =
η
0 1 0 B
− λ
T
−
µ
µ 0 λ &
1442443
(5.3.62)
Q
{
}
olup T , η , ηΛT ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1) den,
B k 31 k 32 k 33 e1
T = k 11 k 12 k 13 e2
& k 21 k 22 k 23 − e3
1
442443
(5.3.63)
P
{
}
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , ηΛT arasındaki dönme açısı spacelike dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cos θ sin θ 0 T
a = − sin θ cos θ 0 ηΛT
2
η
η 0
0
1
44424443
1
R
ve (5.3.62), (5.3.63) ve (5.3.64) eşitlikleri kullanılırsa,
131
(5.3.64)
a1 e1
P Q R a 2 = e 2
144244
3
A2
η − e3
[] [] []
−1
−1
−1
(5.3.65)
A = A2 A1−1
elde edilir. (5.3.60) ve (5.3.65) eşitliklerinden,
yazabiliriz. (5.3.65)
eşitliğinden
a1
e1
d dA2−1
e2
a2 =
dt
dt
− e3
η
ve W2 =
dA2−1
A2 olmak üzere,
dt
λ k 1 cos θ −
θ ′ + µk1
0
da1
k 2 + λ µ ′ − λ ′µ sin θ
dt
a
da
λ k 1 sin θ +
1
2
=
− θ ′ + µk1
−
0
a 2
dt
k 2 + λ µ ′ − λ ′µ cos θ
η
η
λ
θ
λ
θ
−
k
cos
k
sin
+
1
1
0
−
k 2 + λ µ ′ − λ ′µ cos θ
k 2 + λ µ ′ − λ ′µ sin θ
14444444444444444244444444444444443
(
)
(
(
)
(
)
)
W2
(5.3.66)
elde edilir. Diğer taraftan (5.1.16),
S : TY ( t ) &
→ Sp{η }
lineer
(5.3.61) ve (5.3.66) eşitlikleri kullanılarak,
dönüşümünü
temsil
eden
[ ]
S = s ij
3x3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
− λk1 sin θ −
+ λk1 cos θ −
ε k 2 + λµ ′ cos θ
ε k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk
η , e3
s12 = −
a1 , e3 +
a 2 , e3 +
+
−
k
k
λ
λ
1 sin θ +
1 cos θ +
′
θ
µ
−
−
−
k
1
1
k 2 + λ µ ′
k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
− λk1 sin θ −
+ λk1 cos θ −
ε k 2 + λµ ′ cos θ
ε k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
s13 = −
a
,
e
+
1 2
a 2 , e2
λ
+
k
−
k
λ
1 sin θ +
1 cos θ +
k 2 + λ µ ′
k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
132
θ ′ + ε 1 µk1
η , e2
+
− θ ′ − µk1
s 23
− λk1 sin θ −
+ λk1 cos θ −
ε k 2 + λµ ′ cos θ
ε k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e1
=
a 2 , e1 −
a1 , e1 −
−θ ′ − µk1
+ λ k 1 sin θ +
− λ k 1 cos θ +
k 2 + λ µ ′
k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
(5.3.67)
olacaktır. Dolayısıyla, W ∈ Sp{a1 , a 2 , η } hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
− λk1 sinθ −
λk1 cosθ −
ε1 (k2 + λµ′ − λ′µ) cosθ ε1 (k2 + λµ′ − λ ′µ) sinθ
W P = −
a1 +
a2 + θ ′ + ε1µk1 −θ ′ − µk 1 η
+ λk 1 sinθ +
− λk 1 cosθ +
k 2 + λµ′ − λ ′µ cosθ k 2 + λµ′ − λ′µ sinθ
P
(
(
)
(
)
)
(5.3.68)
olarak elde edilir.
a2) (Y) pol eğrisinin asli normal vektör alanı spacelike olsun.
2
2
Bu durumda − & , & = B, B = −1 , µ − λ = 1 ve µ µ ′ − λ λ ′ = 0 eşitliklerini
kullanabiliriz. (5.3.3) eşitliklerinden,
T 0 1 0 &
ηΛT = − µ 0 − λ T
η λ 0 µ B
1442443
(5.3.69)
Q
(3.2.1) eşitliğinden,
& k 21 k 22 k 23 e1
T = k 11 k 12 k 13 e2
B k 31 k 32 k 33 − e3
1442443
(5.3.70)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
133
a1 cos θ sin θ 0 T
a = − sin θ cos θ 0 ηΛT
2
η 0
0
1 η
44424
1
44
3
(5.3.71)
R
eşitliği vardır. (5.3.69) , (5.3.70) ve (5.3.71) eşitlileri kullanılarak,
a1 e1
P Q R a 2 = e2
144244
3
A2
η − e3
[][][]
−1
−1
−1
(5.3.72)
elde edilir. Diğer taraftan (5.3.72) eşitliği kullanılarak,
a1
e1
d dA2−1
e2
a 2 =
dt
dt
− e3
η
ve W2 =
dA2−1
A2 olmak üzere (5.3.72) eşitliği de kullanılırsa,
dt
− λ k 1 cosθ +
θ ′ − µk1
0
da1
− k 2 + λ µ ′ − λ ′µ sinθ
dt
a
da
λ k 1 sinθ +
1
2=
0
− θ ′ + µk1
a2
dt
− k 2 + λ µ ′ − λ ′µ cosθ
η
dη
λ
θ
λ
θ
−
k
cos
+
k
sin
+
1
1
dt
0
− k 2 + λ µ ′ − λ ′µ sinθ − k 2 + λ µ ′ − λ ′µ cosθ
14444444444444444
4244444444444444444
3
(
)
(
(
)
(
)
)
W2
(5.3.73)
Diğer
taraftan
(5.1.16),
S : TY ( t ) &
→ Sp{η }
lineer
(5.3.61)
ve
dönüşümünü
(5.3.73)
temsil
eşitlikleri
eden
kullanılarak,
[ ]
S = s ij
3x3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
− λk1 sin θ −
λk1 cos θ −
ε k 2 + λµ ′ cos θ
ε k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e3
s12 = −
a
,
e
+
1 3
a 2 , e3 +
λ
λ
−
k
+
k
1 sin θ −
1 cosh θ −
′
θ
µ
−
+
k
1
− k 2 + λ µ ′
− k 2 + λ µ ′
sin θ
cos θ
− λ ′µ
− λ ′µ
134
− λk1 sin θ −
λk1 cos θ −
ε k 2 + λµ ′ cos θ
ε k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e2
s13 = −
a 2 , e2 +
a1 , e2 +
λ
λ
k
+
k
−
1 sin θ −
1 cosh θ −
′
θ
µ
−
+
k
1
− k 2 + λ µ ′
− k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
s 23
− λk1 sin θ −
λk1 cos θ −
ε k 2 + λµ ′ cos θ
ε k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ + ε 1 µk1
η , e1
=
a 2 , e1 −
a1 , e1 −
−θ ′ + µk1
− λ k 1 sin θ −
+ λ k 1 cosh θ −
− k 2 + λ µ ′
− k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
(5.3.74)
olacaktır. Dolayısıyla, W ∈ Sp{a1 , a 2 , η } hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
− λk1 sinθ −
λk1 cosθ −
ε1 (k2 + λµ′ − λ′µ) cosθ ε1 (k2 + λµ′ − λ ′µ) sinθ
W P = −
a1 +
a2 + θ ′ + ε1µk1 −θ ′ + µk 1 η
− λk 1 sinθ −
+ λk 1 coshθ −
− k 2 + λµ′ − λ′µ cosθ − k 2 + λµ′ − λ ′µ sinθ
P
(
(
)
(
)
)
(5.3.75)
olarak elde edilir.
b) (X) pol eğrisinin asli normal vektör alanı spacelike olsun.
Bu durumda − & , & = B, B = −1 , λ2 − µ 2 = 1 ve λλ ′ − µµ ′ = 0 eşitliklerini
kullanabiliriz. (5.3.3) ve (5.3.4) eşitliklerinden,
1
0 &
T 0
ε ξΛT = − ε µ 0 − ε λ T
1
1
1
0 ε µ B
1λ
ε 1ξ 1
ε4
442441 4
3
Q
135
(5.3.76)
(3.2.1) eşitliğinden,
& k 21 k 22 k 23 e1
T = k
11 k12 k13 e2
B k 31 k 32 k 33 − e3
1442443
(5.3.77)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
b1 ε 1 cos θ ε 1 sin θ 0 T
b = − ε sin θ ε cos θ 0 ε ξΛT
1
2 1
1
ε 1ξ
0
0
1 ε 1ξ
1444424444
3
(5.3.78)
R
eşitliği vardır. (5.3.76) , (5.3.77) ve (5.3.78) eşitlileri kullanılarak,
b1 e1
[1
P ] [Q ] [R ] b2 = e2
442443
A1
ε 1ξ − e3
−1
−1
−1
(5.3.79)
elde edilir. Diğer taraftan (5.3.79) eşitliği kullanılarak,
b1
e1
d dA −1
e2
b2 =
dt
dt
− e3
ε 1ξ
ve W1 =
dA1−1
A1 olmak üzere (5.3.79) eşitliği de kullanılırsa,
dt
− λk1 cos θ +
db1
θ ′ − ε 1 µk1
0
dt
ε 1 (− k 2 + λµ ′ − λ ′µ ) sin θ b
1
db
λk1 sin θ +
2 =
0
b
− θ ′ + ε 1 µk1
2
dt
ε 1 (− k 2 + λµ ′ − λ ′µ ) cos θ ε ξ
ε
ξ
d
1 − λk cos θ +
1
λk1 sin θ +
1
dt
0
′
′
ε (− k + λµ ′ − λ ′µ ) cos θ
1 (− k 2 + λµ − λ µ ) sin θ
ε4
1
4444444444441 442442444444444444444443
W1
(5.3.80)
elde edilir.
& , & = − B, B = ε olmak üzere (5.3.61) ve (5.3.80) eşitliklerinden şu
sonucu verebiliriz.
Sonuç 5.3.20: θ ′ − εε 1 µk1 = 0 ise b1 ve b2 vektör alanları (X) spacelike eğrisi boyunca
paralel vektör alanlarıdır.
136
İspat : Sonuç 5.3.1 in ispatına benzer şekilde gösterilebilir.
b1) (Y) pol eğrisinin asli normal vektör alanı timelike olsun.
2
2
Bu durumda & , & = − B, B = −1 , λ − µ = 1 ve µ µ ′ − λ λ ′ = 0 eşitliklerini
kullanabiliriz. (5.3.3) eşitliklerinden,
T 0 1 0 B
− µ T
ηΛT = − λ
η µ 0 λ &
442443
1
(5.3.81)
Q
{
}
olup T , η , ηΛT ortonormal vektör alanı sistemini oluşturabiliriz. Ayrıca (3.2.1) den,
B k 31 k 32 k 33 e1
T = k 11 k 12 k 13 e2
& k 21 k 22 k 23 − e3
1
442443
(5.3.82)
P
{
}
yazabiliriz. Sp{a1 , a 2 } sistemi ile Sp T , ηΛT arasındaki dönme açısı spacelike dönme
açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cos θ sin θ 0 T
a = − sin θ cos θ 0 ηΛT
2
0
1
η
η 0
144424443
(5.3.83)
R
ve (5.3.81), (5.3.82) ve (5.3.83) eşitlikleri kullanılırsa,
a1 e1
P Q R a 2 = e 2
144244
3
A2
η − e3
[] [] []
−1
−1
−1
elde edilir. (5.3.60) ve (5.3.84) eşitliklerinden,
A = A2 A1−1
eşitliğinden
a1
e1
d dA2−1
e2
a 2 =
dt
dt
− e3
η
dA2−1
ve W2 =
A2 olmak üzere,
dt
137
(5.3.84)
yazabiliriz. (5.3.84)
λ k 1 cos θ −
θ ′ + µk1
0
da1
′
′
λ
µ
λ
µ
θ
+
−
k
sin
2
dt
a
da
λ k 1 sin θ +
1
2
=
− θ ′ − µk1
−
0
a2
dt
k 2 + λ µ ′ − λ ′µ cos θ
η
dη
λ
θ
λ
θ
−
+
k
cos
k
sin
1
1
dt
0
−
k 2 + λ µ ′ − λ ′µ cos θ
k 2 + λ µ ′ − λ ′µ sin θ
14444444444444444244444444444444443
(
)
(
(
)
(
)
)
W2
(5.3.85)
elde edilir. Diğer taraftan (5.1.16),
S : TY ( t ) &
→ Sp{η }
lineer
(5.3.80) ve (5.3.85) eşitlikleri kullanılarak,
dönüşümünü
temsil
eden
[ ]
S = s ij
3x3
matrisi,
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
λk1 sin θ +
− λk1 cos θ +
ε − k 2 + λµ ′ cos θ
ε − k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ − ε 1 µk1
η , e3
s12 = −
a 2 , e3 +
a1 , e3 +
−θ ′ − µk1
+ λ k 1 sin θ +
− λ k 1 cosh θ +
k 2 + λ µ ′
k 2 + λ µ ′
sin θ
cos θ
− λ ′µ
− λ ′µ
λk1 sin θ +
− λk1 cos θ +
ε − k 2 + λµ ′ cos θ
ε − k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ − ε 1 µk1
η , e2
s13 = −
a
,
e
+
1 2
a 2 , e2 +
−θ ′ − µk1
+ λ k 1 sin θ +
− λ k 1 cosh θ +
k 2 + λ µ ′
k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
λk1 sin θ +
− λk1 cos θ +
ε − k 2 + λµ ′ cos θ
ε − k 2 + λµ ′ sin θ
1
1 − λ ′µ
− λ ′µ
θ ′ − ε 1 µk1
η , e1
s 23 =
a1 , e1 −
a 2 , e1 −
−θ ′ − µk1
+ λ k 1 sin θ +
− λ k 1 cosh θ +
k 2 + λ µ ′
k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
(5.3.86)
138
olacaktır. Dolayısıyla W ∈ Sp{a1 , a 2 , η } hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
λk1 sinθ +
− λk1 cosθ +
ε1 (− k2 + λµ′ − λ ′µ) cosθ ε1 (− k2 + λµ′ − λ′µ) sinθ
W P = −
a1 +
a2 + θ ′ − ε1µk1 −θ ′ − µk 1 η
+ λk 1 sinθ +
− λk 1 cosθ +
k 2 + λµ′ − λ ′µ cosθ k 2 + λµ′ − λ′µ sinθ
(
(
)
(
)
)
P
(5.3.87)
olarak elde edilir.
b2) (Y) pol eğrisinin asli normal vektör alanı spacelike olsun.
2
2
Bu durumda − & , & = B, B = −1 , µ − λ = 1 ve µ µ ′ − λ λ ′ = 0 eşitliklerini
kullanabiliriz. (5.3.3) eşitliklerinden,
T 0 1 0 &
ηΛT = − µ 0 − λ T
η λ 0 µ B
1442443
(5.3.88)
Q
(3.2.1) eşitliğinden,
& k 21 k 22 k 23 e1
T = k 11 k 12 k 13 e2
B k 31 k 32 k 33 − e3
1442443
(5.3.89)
P
eşitliklerini yazabiliriz. Sp{b1 ,b2 } sistemi ile Sp{T , ξΛT } arasındaki dönme açısı
spacelike dönme açısı olup (Ratcliffe 1994), bu açı θ = θ (t ) ise,
a1 cos θ sin θ 0 T
a = − sin θ cos θ 0 ηΛT
2
η
0
0
1 η
4
1
442444
3
R
eşitliği vardır. (5.3.88) , (5.3.89) ve (5.3.90) eşitlileri kullanılarak,
139
(5.3.90)
a1 e1
P Q R a 2 = e2
144244
3
A2
η − e3
[][][]
−1
−1
−1
(5.3.91)
elde edilir. Diğer taraftan (5.3.90) eşitliği kullanılarak,
a1
e1
d dA2−1
e2
a 2 =
dt
dt
− e3
η
dA2−1
ve W2 =
A2 olmak üzere, (5.3.91) eşitliği de kullanılırsa,
dt
− λ k 1 cos θ +
′
0
−
k
θ
µ
1
da
1
− k 2 + λ µ ′ − λ ′µ sin θ
dt
a
da
λ k 1 sin θ +
1
2=
−θ ′ + µk 1
0
a2
dt
− k 2 + λ µ ′ − λ ′µ cosθ
η
dη
λ k 1 sin θ +
dt − λ k 1 cosθ +
0
− k 2 + λ µ ′ − λ ′µ sin θ − k 2 + λ µ ′ − λ ′µ cos θ
1
4444444444444444244444444444444443
(
)
(
(
)
(
)
)
W2
(5.3.92)
elde edilir.
& , & = − B, B = ε olmak üzere (5.3.66), (5.3.73), (5.3.85) ve (5.3.92)
eşitliklerinden şu sonucu verebiliriz.
Sonuç 5.3.21: θ ′ − ε µ k 1 = 0 ise a1 (t ) ve a 2 (t ) vektör alanlarının (Y) spacelike eğrisi
boyunca göre paralel vektör alanlarıdır.
İspat: Sonuç 5.3.2 in ispatına benzer şekilde gösterilebilir.
Diğer
taraftan
(5.1.16),
S : TY ( t ) &
→ Sp{η }
lineer
(5.3.80)
ve
dönüşümünü
(5.3.92)
temsil
eşitlikleri
eden
s11 = s 22 = s 33 = 0 , s12 = − s 21 , s13 = s 31 ve s 23 = s32 olmak üzere
140
kullanılarak,
[ ]
S = s ij
3x3
matrisi,
λk1 sin θ +
− λk1 cos θ +
ε − k 2 + λµ ′ cos θ
ε − k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ − ε 1 µk1
η , e3
s12 = −
a1 , e3 +
a 2 , e3 +
−θ ′ + µk1 −
− λ k 1 sin θ −
+ λ k 1 cos θ −
− k 2 + λ µ ′
− k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
λk1 sin θ +
− λk1 cos θ +
ε − k 2 + λµ ′ cos θ
ε − k 2 + λµ ′ sin θ
1 − λ ′µ
1 − λ ′µ
θ ′ − ε 1 µk1
η , e2
s13 = −
a
,
e
+
1 2
a 2 , e2 +
k
k
−
+
λ
λ
1 sin θ −
1 cos θ −
′
−
+
k
−
θ
µ
1
− k 2 + λ µ ′
− k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
s 23
λk1 sin θ +
− λk1 cos θ +
ε − k 2 + λµ ′ cos θ
ε − k 2 + λµ ′ sin θ
1
1 − λ ′µ
− λ ′µ
θ ′ − ε 1 µk1
η , e1
=
a1 , e1 −
a 2 , e1 −
−θ ′ + µk1 −
− λ k 1 sin θ −
+ λ k 1 cos θ −
− k 2 + λ µ ′
− k 2 + λ µ ′
cos θ
sin θ
− λ ′µ
− λ ′µ
(5.3.93)
olacaktır. Dolayısıyla, W ∈ Sp{a1 , a 2 , η } hareketin yuvarlanma kısmına ait Darboux
vektörü P=(0,0,0) olmak üzere,
λk1 sinθ +
− λk1 cosθ +
ε1 (− k2 + λµ′ − λ ′µ) cosθ ε1 (− k2 + λµ′ − λ′µ) sinθ
W P = −
a1 +
a2 + θ ′ − ε1µk1 −θ ′ + µk 1 η
− λk 1 sinθ −
+ λk 1 cosθ −
− k 2 + λµ′ − λ′µ cosθ − k 2 + λµ′ − λ′µ sinθ
P
(
(
)
(
)
)
(5.3.94)
olarak elde edilir. (5.3.68), (5.3.75), (5.3.87) ve (5.3.94) eşitliklerini genelleştirecek
olursak,
141
ελ k1 sinθ +
− ελ k1 cosθ +
εε1 (− εk2 + λµ ′ − λ ′µ) cosθ
εε1 (− εk2 + λµ ′ − λ ′µ) sinθ
W P = −
a1 +
a2 + θ ′ − εε1µk1 −θ ′ + ε µk 1 η
+ ε λk 1 cosθ −
− ε λk 1 sinθ −
ε − ε k 2 + λµ ′ − λ ′µ cosθ
ε − ε k 2 + λµ′ − λ ′µ sinθ
P
(
(
)
(
)
)
(5.3.95)
olacaktır.
Teorem 5.3.5: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike
eğrileri boyunca birer ortonormal vektör alanı sistemi olmak üzere, F hareketinin bir
homotetik hareket olması için gerekli ve yeterli şart θ ′ − εε 1 µk1 − θ ′ + ε µ k 1 = 0
olmasıdır.
Sonuç 5.3.23: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) spacelike eğrileri
boyunca paralel vektör alanları iseler, değme noktalarında b1 = hB −1 a1 , b2 = hB −1 a 2 ve
ε 1ξ = hB −1η olacak şekilde tanımlanan M ve N spacelike manifoldların F hareketi bir
homotetik harekettir.
Sonuç 5.3.24: Eğer b1 (t ), b2 (t ) ve a1 (t ), a2 (t ) , sırasıyla, (X) ve (Y) spacelike geodezik
eğrileri boyunca paralel vektör alanları ise θ
ve θ hareket boyunca sabit olup
θ = θ ’dir.
Sonuç 5.3.25: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) düzlemsel
spacelike eğrileri boyunca birer paralel vektör alanı sistemi ve λ = λ = 0 ise, F hareketi
sadece kayma hareketidir.
İspat: {b1 , b2 } ve {a1 , a 2 } vektör alanları, sırasıyla, (X) ve (Y) spacelike eğrileri
boyunca birer paralel vektör alanı ise
θ ′ − εε 1 µk1 − θ ′ + ε µ k 1 = 0
142
olur. (X) ve (Y) düzlemsel eğriler ve λ = λ = 0 ise (5.3.95) den P değme noktalarında,
W
P
= 0 olacaktır. Dolayısıyla S=0 ve (3.5.7) eşitliğinden hareket sadece kaymadan
ibaret olur.
Teorem 5.3.6: F, spacelike manifoldların, spacelike eğriler boyunca homotetik hareketi
esnasında, (X) ve (Y) spacelike eğrileri boyunca M ve N nin şekil operatörleri, sırasıyla,
S M ve S & olsun. Eğer
dX
dY
BS M
= S&
dt
dt
ise, F hareketi sadece bir kayma hareketidir. Bu durumda, (5.3.95) ile verilen Darboux
vektörü sıfır vektörü olacaktır.
İspat : Teorem 5.3.2 nin ispatına benzer şekilde ispatlanabilir.
Sonuç 5.3.26: F spacelike manifoldların, spacelike eğriler boyunca bir homotetik
hareketi ise, M ve N manifoldlarının şekil operatörleri arasında
dX
dY
BS M
≠ S&
dt
dt
bağıntısı vardır.
Sonuç 5.3.27: M ve N spacelike manifoldların birbiri üzerinde 1-parametreli homotetik
hareket yapması için, M ve N üzerindeki (X) ve (Y) spacelike eğrilerinin hiçbiri M nin
ve N nin flat noktalarından geçmemesi gerekir.
Sonuç 5.3.28: F bir homotetik hareket, (X) ve (Y) spacelike eğrileri, sırasıyla, M ve N
spacelike manifoldlar üzerinde birer eğrilik çizgisi ve λ , k1 , λ , k 1 ayrı ayrı sabit ise,
θ ′ − θ ′ = ε µ k 1 − εε 1 µk1 = sabit ’dir. Özel olarak µ = µ = 0 ise (X) ve (Y) spacelike
geodezik eğrilik çizgisidir.
Sonuç 5.3.29: M herhangi bir spacelike manifold ve N spacelike düzlem ise, Bölüm
5.2–(iv) de verilen sonuçlar elde edilir.
143
Sonuç 5.3.30: M bir hiperbolik küre ve N spacelike düzlem ise, Bölüm 5.1 de verilen
sonuçlar elde edilir.
xi) M bir lightlike manifold ve (X) eğrisi spacelike olsun.
Q ∈ SO1 (3) matrisi vektörlerin karakterlerini koruyacağından, ξ lightlike vektör alanını
yine başka bir lightlike vektör alanına dönüştürecektir. Dolayısıyla (X) eğrisi timelike
veya spacelike ise Frenet vektörlerinden hiçbiri lightlike olmadığı için bir hareket
denklemi oluşturulamaz. Ancak, eğri eğer lightlike asli normalli spacelike eğri olsa bile,
ortonormal çatıya sahip olmayacağından yine bir hareket denklemi oluşturulamaz.
xii) M bir lightlike manifold ve (X) eğrisi light -like olsun.
Yine, (X) eğrisi lightlike ve lightlike eğriler ortonormal bir çatıya sahip olmadığından,
P ∈ SO1 (3) olacak şekilde bir matris bulunamaz. Dolayısıyla, bu durum için de bir
hareket denklemi oluşturulamaz.
Örnek 5.3.1:
Denklemi x1 + x 2 − ( x3 + 1) = −1 olan H 02 üzerinde,
2
2
2
X (t ) = (sinh t , 0 , cosh t − 1)
t ∈ [0, π ]
küresel spacelike eğrisini göz önüne alalım. (X) eğrisi için,
T = ( cosh t , 0 , sinh t ) , & = (sinh t , 0 , cosh t ) B = (0 ,−1, 0)
ξ (t ) = (sinh (t ) , 0 , − cosh (t ))
ξ (t ) = sinh (t ) e1 + cosh (t )(− e3 )
k1 = 1 , k 2 = 0 , λ = 1 , µ = 0 , ε = −1 bulunur. Denklemi x1 − ( x3 + 1) = −1 ile verilen
2
2
N spacelike silindir üzerinde denklemi 0 ≤ t ≤ π için Y (t ) = (sinh (t ) , t , cosh (t ) − 1) ile,
verilen timelike asli normalli spacelike helis eğrisi için,
T=
1
2
(cosh (t ), 1 , sinh (t )) ,
B=
1
2
(cosh (t ), − 1 , sinh (t )) ,
144
& = (sinh (t ), 0, cosh (t )) ,
k1 = k 2 =
1
2
ve ε = −1
olup, M silindirinin (Y) boyunca birim normal vektör alanı
η (t ) = (sinh (t ) , 0 , − cosh (t ))
η (t ) = sinh (t ) e1 + cosh (t )(− e3 )
dir. Dolayısıyla, λ = 1 ve µ = 0 olup hareket boyunca sabittir. Ayrıca
dY
=h= 2
dt
bulunur. (iv-a-a1) den,
dY
dX
=B
dt
dt
eşitliği de göz önüne alınarak her θ (t ) = θ = 0 için B matrisi,
1
cosh 2 (t ) − sinh 2 (t )
2
1
B (t ) = 2
cosh (t )
2
1 − 1 sinh (t ) cosh (t )
2
bulunur.
1
cosh (t )
− 1 sinh (t ) cosh (t )
2
2
1
1
sinh (t )
2
2
1
−1
2
2
sinh (t )
sinh (t ) + cosh (t )
2
2
−1
dB
dC
X+
= 0 ve Y = BX + C eşitliklerini sağlayan C matrisi ve hareketin
dt
dt
denklemi ,
Y (t ) =
1− 2
cosh2 (t ) + 1
2
1
2
cosh(t )
2
2 − 1 sinh(t ) cosh(t )
2
2 −1
sinh(2t ) +
−1
1− 2
cosh(t )
sinh(t ) cosh(t )
2
2
2
1 − 2 sinh(t )
1
1
X (t ) +
sinh(t )
{t − sinh(t )}
2
2
1 − 2
1
2 −1
(cosh(2t ) + 1) +
sinh(t )
sinh2 (t ) + 1
2
2
2
2 − 1 cosh(t )
(
(
)
)
olarak bulunmuş olur. Bu hareketin yuvarlanma kısmına ait Darboux matrisi ve
Darboux vektörü de
0
2
S =
sinh(t )
2
2 −2
2
− 2
sinh(t )
2
0
2
cosh(t )
2
2 −2
2
2
cosh(t ) ve W
2
0
145
P
− 2
=
cosh(t ),
2
2−2
2
,
sinh(t )
2
2
olacaktır.
ε = ε = −1 , ε 1 = 1 , k 1 = k 2 =
1
2
, k1 = 1 , k 2 = 0 , λ = 1 , µ = 0 , λ = 1 ,
µ = 0 ve θ (t ) = θ = 0 için (5.3.95) eşitliğinden W ∈ Sp{a1 , a 2 ,η } vektörü,
W=
−1
2
a1 +
2 −1
2
a2
diğer taraftan (5.3.62), (5.3.63) ve (5.3.64) eşitliklerinden,
a1 =
a2 =
2
2
2
cosh(t ) e1 +
e2 +
sinh(t ) (−e3 )
2
2
2
− 2
2
− 2
cosh(t ) e1 +
e2 +
sinh(t ) (−e3 )
2
2
2
olmak üzere W ∈ Sp{e1 , e2 ,−e3 }vektörü,
W=
− 2
cosh(t ) e1 +
2
2 −2
2
e2 +
sinh(t ) (− e3 )
2
2
olup yukarıda elde ettiğimizle aynı vektördür. Dolayısıyla hiperbolik küre, spacelike
silindir üzerinde, timelike asli normalli spacelike (X) ve spacelike asli normalli
spacelike (Y) pol eğrileri boyunca homotetik olarak hareket eder.
Şekil 5.3.1
146
Örnek 5.3.2:
Denklemi x1 + x 2 − ( x3 − 1) = −1 olan H 02 üzerinde,
2
2
2
X (t ) = (− sinh t , 0 ,1 − cosh t )
t ∈ [0, π ]
küresel spacelike eğrisini göz önüne alalım. (X) eğrisi için,
T = ( − cosh t , 0 , − sinh t ) , & = (− sinh t , 0 , − cosh t ) , B = (0 ,−1, 0)
ξ (t ) = (− sinh (t ) , 0 , cosh(t ))
ξ (t ) = − sinh (t ) e1 − cosh (t )(− e3 )
k1 = 1 , k 2 = 0 , λ = 1 , µ = 0 , ε = −1 bulunur. Denklemi x1 − ( x3 + 1) = −1 ile verilen
2
2
M spacelike silindiri üzerinde denklemi 0 ≤ t ≤ π için, Y (t ) = (sinh(t ) , t , cosh(t ) − 1)
ile verilen timelike asli normalli spacelike helis eğrisi için,
T=
1
2
(cosh (t ), 1 , sinh (t )) ,
B=
1
2
(cosh (t ), − 1 , sinh (t )) ,
k1 = k 2 =
1
2
ve ε = −1
olup, M silindirinin (Y) boyunca birim normal vektör alanı
η (t ) = (sinh (t ) , 0 , − cosh(t ))
η (t ) = sinh (t ) e1 − cosh (t )e3
η (t ), e3 = cosh(t )
η (t ) = sinh (t ) e1 + cosh (t )(− e3 )
147
& = (sinh (t ), 0, cosh (t ))
yazılabilir.
Dolayısıyla, λ = 1
ve µ = 0 olup hareket boyunca sabittir. Ayrıca
dY
= h = 2 bulunur. (iv-a-a1) den
dt
dY
dX
=B
dt
dt
eşitliği de göz önüne alınarak her θ (t ) = π , θ = 0 için B matrisi,
(
(
)
)
2 − 1 + 2 cosh 2 (t )
B (t ) =
− cosh(t )
1 + 2 sinh (t ) cosh(t )
(
)
cosh(t )
−1
− sinh (t )
(
)
((
)
− 1 + 2 sinh (t ) cosh(t )
− sinh (t )
2
1 + 2 sinh (t ) + 2
)
dB
dC
X+
= 0 ve Y = BX + C eşitliklerini sağlayan C matrisi ve hareketin
dt
dt
bulunur.
denklemi ,
(
(
)
)
2 − 1 + 2 cosh2 (t ) cosh(t )
Y (t ) =
− cosh(t )
−1
1 + 2 sinh(t ) cosh(t ) − sinh(t )
(
)
(
)
(
)
1 + 2 sinh(t ) −
2 +1
(
)
sinh
2
t
− 1 + 2 sinh(t ) cosh(t )
2
{t − sinh(t )}
− sinh(t )
X (t ) +
1 + 2
1 + 2 sinh2 (t ) + 2
2 (cosh(2t ) + 1)
− 2 + 1 cosh(t )
(
)
((
)
)
olarak bulunmuş olur. Bu hareketin yuvarlanma kısmına ait Darboux matrisi ve
Darboux vektörü de
0
− 2
S =
sinh(t )
2
− 2+2
2
(
)
0
− 2
cosh(t )
2
(
)
2+2
2
− 2
cosh(t )
2
0
−
2
sinh(t )
2
ve
W
P
2
−
=
cosh(t ),
2
(
)
2+2 − 2
,
sinh(t )
2
2
148
olacaktır.
ε = ε = −1 , ε 1 = −1 , k 1 = k 2 =
1
2
, k1 = 1 , k 2 = 0 , λ = 1 , µ = 0 , λ = 1 ,
µ = 0 , ve θ (t ) = π , θ = 0 için (5.3.95) eşitliğinden W ∈ Sp{a1 , a 2 ,η } vektörü,
1
W=
2
2 +1
a1 +
2
a2
diğer taraftan (5.3.62), (5.3.63) ve (5.3.64) eşitliklerinden,
a1 =
2
2
− 2
cosh(t ) e1 −
e2 −
sinh(t ) (−e3 )
2
2
2
a2 =
2
2
2
e2 +
sinh(t ) ( −e3 )
cosh(t ) e1 −
2
2
2
olmak üzere W ∈ Sp{e1 , e 2 ,−e3 }vektörü,
W=
2
cosh(t ) e1 −
2
(
)
2+2
2
e2 +
sinh(t ) (− e3 )
2
2
olup yukarıda elde ettiğimizle aynı vektördür. Dolayısıyla hiperbolik küre, spacelike
silindir içinde, timelike asli normalli spacelike (X) ve spacelike asli normalli spacelike
(Y) pol eğrileri boyunca homotetik olarak hareket eder.
Şekil 5.3.2
149
KAY%AKLAR
Baştaş, H. E. 1997. Minkowski Uzayında Hareketler, Doktora Tezi, Ankara Üniversitesi
Fen Bilimleri Enstitüsü.
Clifford, W. and McMahon, J.J. 1961. The Rolling Of One Curve or Surface Upon
Another, Am. Math. Mon. 68, 338-341,23A 2134.
Duggal, K. L. and Bejancu, A. 1996. Lightlike Submanifolds of Semi-Riemannian
Manifolds and Applications. Kluwer Academic Publisher.
Ergin, A. A. 1991. Lorentz Düzleminde Kinematik Geometri, Doktora Tezi , Ankara
Üniversitesi Fen Bilimleri Enstitüsü.
Ekmekci, N. and İlarslan, K. 1998. Higher Curvatures in Lorentzian Space. Jour. Of Ins.
Of Math. And Comp. Sci. (Math. Ser.) Vol.11;97-102.
Hacısalihoğlu, H.H. 1971. On The Rolling Of One Curve or Surface Upon Another,
Proceedings Of The Royal Irish Academy, Vol. 71, Sec. A, Number 2, Dublin.
Hacısalihoğlu, H.H. 1971. On Closed Spherical Motions, Quaterly Of
Applied
Mathematics, pp: 269-275.
Hacısalihoğlu, H.H. 1974. On The Geometry Of In The Euclidean n-Space, Faculté des
Science de I’Université d’Ankara, Ankara, Turquie.
Hacısalihoğlu, H.H. 1980. Yüksek Boyutlu Uzaylarda Dönüşümler Ve Geometriler,
İnönü Üniversitesi Temel Bilimler Fakültesi Yayınları No:1, Malatya.
Hicks, N. J. 1974. Notes On Differential Geometry, Von. Nost. Rein. Com., London ,
Ikawa, T.1985. On curves and submanifolds in an indefinite-Riemannian manifold.
Tsukuba J. Math. Vol.9; 353-371.
Karakaş, B. 1980. Lie Grup Etkileri, Lie Cebiri Ve Kinematik Geometri, Yüksek Lisans
Tezi, Atatürk Üniversitesi Temel Bilimler ve Yabancı Diller Yüksek Okulu.
Karakaş, B. 1982. Altmanifoldların Diferensiyel Geometrisi Ve Kinematiğine Dair,
Doktora Tezi Atatürk Üniversitesi Temel Bilimler ve Yabancı Diller Yüksek
Okulu.
Kılıç, O. 1996. IR13 Minkowski 3-Uzayında Spacelike Eğrilerin Frenet ve Darboux
Vektörleri, Yüksek Lisans Tezi, Celal Bayar Üniversitesi Fen Bilimleri
Enstitüsü .
150
Matsushima, Y. 1972. Differential Geometry, Marcel Deccer, INC., New York.
Müller, H. R. 1966. Zur Bewegunssgeometrie In Räumen Höherer Dimension.
Monotshefte für Math. 70 Band, 1 Heft. pp. 47-57.
Nakanishi, Y. 1988. On curves in pseudo-Riemannian submanifolds. Yokohama
Mathematical Journal. Vol.36;137-146.
Nomizu, K. 1966. Fundamentals Of Linear Algebra, McGraw-Hill Book Company,
pp.269, New York.
Nomizu, K. 1977. Kinematics and Differential Geometry Of Submanifolds, Tohoku
Math. Journ. 30(1978), 623-637.
Olcaylar, İ. 1956. On Planar Homothetic Motions, Phd dissertation. Faculty of Science
University of Ankara.
Olcaylar, İ. 1967. Homothetic Motions in Three Dimensional Space, Thesis of
Docentship, Faculty of Science Midle East Technical University, Ankara.
O’Neill, B. 1983. Semi-Reimann Geometry, Academic Press, New York.
Petrovič-Torgašev Miroslava and Šučurovič Emilija 2000. Some Characterizations of
The Spacelike, The Timelike and The Null Curves On The Pseudohyperbolic
Space H 02 in E13 , Kragujevac J. Math. 22, 71-82.
Ratcliffe, John G. 1994. Foundation of Hyperbolic Manifolds, Springer Verlag, Cilt I-II.
Sabuncuoğlu, A. 1982. Genelleştirilmiş Regle Yüzeyler, Doçentlik Tezi, Ankara
Üniversitesi Fen Fakültesi.
Uğurlu, H. H. and Topal, A. 1996. Relation Between Darboux Instantaneous Rotation
Vectors of Curves On A Timelike Surface, Mathematical & Computational
Applications, Vol 1, No: 2, pp 149-157.
Uğurlu, H. H. 1998. Spacelike Doğrultmanlı Bir Timelike Regle Yüzeye Bağlı
Üçyüzlülerin Ani Dönme Vektörleri, Celal Bayar Üniversitesi, Fen Edebiyat
Fakültesi Dergisi.
Yaylı, Y. 1985. Cayley Formülü Üzerine Kinematik Uygulama, Yüksek Lisans Tezi,
Gazi Üniversitesi Fen Bilimleri Enstitüsü.
Yaylı, Y. 1988. Hamilton Hareketleri Ve Lie Grupları, Doktora Tezi, Gazi Üniversitesi
Fen Bilimleri Enstitüsü.
151
ÖZGEÇMİŞ
Adı Soyadı
:Yılmaz TUNÇER
Doğum Yeri
: Bolvadin-Afyon
Doğum Tarihi : 01.03.1973
Medeni Hali
: Evli
Yabancı Dili : İngilizce
Eğitim Durumu (Kurum ve Yıl)
Lise
:Bursa Demirtaşpaşa Endüstri Meslek Lisesi, 1990.
Lisans
:Ondokuz Mayıs Üniversitesi Eğitim Fakültesi Matematik
Bölümü, 1996.
Yüksek Lisans : Afyon Kocatepe Üniversitesi Fen Bilimleri Enstitüsü, 2000.
Çalıştığı Kurum / Kurumlar ve Yıl :
Samat İlköğretim Okulu Gerede-Bolu /1996Yayınları (SCI ve diğer)
152