Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
7.1.4 Paket Şalter İle
Bu devredeki DG düşük gerilim rölesi düşük
gerilime karşı koruma yapar. Yani şebeke gerilimi
kesilir ve tekrar gelirse motorun çalışmasına
engel olur.
7.2 SIRALI KONTROL
Sıralı kontrol, bir yol verici enerjilenmediği sürece diğerinin çalışmayacak şekilde bağlanmasıyla
oluşturulan yöntemdir. Bir makinanın kendisi güvenle çalışmaya başlamadan önce yüksek basınçlı
yağlama ve hidrolik pompalar gibi bir makine ile kullanılan yardımcı donanımın çalışması ger4ekirse,
bu tip bir kontrole ihtiyaç duyulur.
7.3 OTOMATİK SIRALI KONTROL
Çok sayıda motor şekilde gibi sadece bir durumunda başlatma kontrol merkezi ile otomatik olarak
çalıştırılabilir.
Yandaki devrede yağ pompası (M1)
başlatma butonuna basıldığında, ana
sürücü motor (M2) çalışmaya başlamadan
önce basınç anahtarını kapatmak için
yeterli değere yükselmelidir. Basınç
anahtarı aynı zamanda zaman rölesini (Tr)
de
enerjiler.
Belirli
bir
zaman
gecikmesinden sonra Tr kontağı kapanır ve
besleme
(talaş
kaldırma
tezgahı)
motorunun yol verici bobini (M3) enerjilenir.
50
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
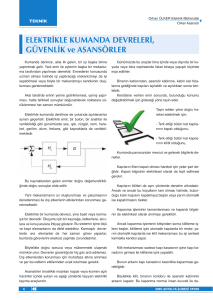
7.4 MANTIK KAVRAMA VE KONTROL İŞLEVİ
İşlev
Giriş (bilgi)
Mantık (karar)
Çıkış (etki)
Eleman
İtmeli
butonlar,
sınır,
basınç,
yaklaşma anahtarları, fotoseller vb.
Röleler,elektron lambaları, manyetik
yükselteçler, hidrolik ve havalı
valflar, transistörler, vs.
Kontaktörler,
yol
vericiler,
selenoidler,
manyetik
güç
yükselteçleri, elektronik ve yarı
iletken kontaktörler.
Kullanımı
Algılama ya da bilgi kaynağı
Giriş elemanlarından alınan bilgi üzerinde
işlem yapar, karar verir ve arz edilen çıkış
sinyallerini sağlar.
Mantık çıkış sinyallerini arz edilen seviyeye
yükseltir.
7.4.1 Mantık Elemanlarının Karşılıkları
8. MOTORLARA YOL VERME
Motorlara düşük gerilimle yol vermenin iki nedeni vardır.
1. Motor tarafından çekilen yüksek yol alma akımını azaltmak
2. Motorun yol alma torkunu azaltmak.
Sincap kafesli endüksiyon motorların basitliği, dayanıklılığı ve güvenirliliği çok çeşitli amaçlar için
alternatif akım, sabit hızlı motor uygulamalarında bu motorların standart tercih nedeni yapmıştır.
Birkaç motor çeşidi dolayısıyla da çeşitli yol verme yöntemleri ve kontrol donanımı bulunmaktadır.
8.1. DÜŞÜK GERİLİM, DÜŞÜK AKIM, DÜŞÜK TORK
Düşük gerilim yöntemleri grubu genellikle standart şebeke gerili ile yol verme
yönteminin dışındaki bütün yol verme yöntemlerini içine alır. Düşük gerilim yol
vericileri sadece hat akımını yada yol almış torkunu azaltmak için gerilimi düşürür.
Hat akımının azaltılması paralel olarak en çok arzu edilen sonuçtur.
Bir motora yol vermek için gerilim düşürüldüğünde akım da ve makinaya verilen
tork da azalır. Tam gerilimde bir yükü çalıştıramayan bir motor, düşük gerilim
yada düşük akımla aynı yükü çalıştıramayacaktır. Bu yüzden düşük gerilimle yol
vermede genellikle motor boştayken yapılır.
51
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
8.2. TEMEL YOL VERME YÖNTEMLERİ
Çok fazlı sincap kafesli motorlar için en çok kullanılan yolverme yöntemleri şunlardır.
1. Tam gerilimle yol verme : Elle çalıştırılan yada otomatik yol verme anahtarı motoru doğrudan
besleme kaynağına bağlayan sistemdir.
2. Primer dirençli yol verme : Statora seri bir direnç bağlanarak yol alma akımı azaltılır.
3. Sekonder dirençle yol verme : Rotor sargılarına fırça yardımıyla seri dirençler sokularak yol alma
akımı azaltılabilir ve hız kontrolü de gerçekleştirilebilir.
4. Oto transformatörlere yol verme : Oto transformatörü çeşitli kademeler elle yada otomatik
olarak seçilerek düşük gerilimle yol verme sağlanabilir.
5. Empedanslı ( Reaktansla ) yol verme : Motora seri bağlı reaktörler kullanılır.
6. Yıldız üçgen yolverme : Motor yolverme anında yıldız, normal çalışma sürecinde üçgen bağlanır.
7. Parçalı sargılı yol verme : Motor stator sargıları iki yada üç devreden oluşturulur. Bu devreler yol
alma anında besleme kaynağına seri, normal çalışma anında paralel
bağlanır.
8. Yarı iletken elektronik kontrol : Akımın yada yol alma zamanının kontrolü alternatif akımın yarım
çevirimlerinde silikon kontrollü doğrultucuları tetikleyerek yapılır.
52
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
8.3. BİR FAZLI ASENKRON MOTORLARDA ÇALIŞTIRILMASI VE YOL VERME
53
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Şekil: Bir fazlı motorun devir yönünü değiştirme kumanda ve güç devresi
Şekil: Üç fazlı yıldız bağlı asenkron motorun bir fazlı çalıştırılması
8.4. PRİMER DİRENÇLİ YOL VERİCİLER
Bu yöntemle bir direnç motora seri bağlanır. Böylece direnç üzerinde bir gerilim düşümü meydana
gelir ve motorun bağlantı uçlarındaki gerilim düşürülür. Sonuçta motorun yol alma hızı ve akımı düşer.
Motor yol aldıkça dirençten geçen akım azaldıkça direnç üzerine düşen gerilim azalır ve motorun
bağlantı uçları üstündeki gerilim artar. Torku ve gerilimi kademeli olarak arttırmakla düzgün bir
hızlanma elde edilir. Motor belirli bir hıza ulaştığında direnç kısadevre edilir. Bu durumda motor tam
gerilimle çalışmasını sürdürür.
Şekildeki boşta ve yüklü bir motora dirençle yol verme anında akımdaki değişmeler gösterilmiştir. 1
eğrisi boştaki çalışmadır. 2 eğrisi yüklü çalışmadır. Her iki motora da dirençle yol verilmektedir. Ve 3.
Saniyede direnç kısa devre edilmektedir. Burada da görüldüğü gibi yüklü motorda ani bir akım
sıçraması görülmektedir. Bu da zararlıdır.
54
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
8.4.1 Dört Kademeli Dirençle Yol Verme
Primer dirençli yol vericiler aşağıdaki özelliklere sahip olmalıdır.
a)
b)
c)
d)
e)
f)
Yapısı basittir.
Maliyeti düşüktür.
Bakımı azdır.
Çalışma sırasında büyük bir hızlanma sağlar.
Yol verme boyunca motorun sürekli şebekeye bağlı kalmasını sağlar.
Güç katsayısı yüksektir.
Bu yol vericiler düşük yol alma torkundan dolayı çok ağır yüklere yol vermekte kullanılırlar. Yol verme
dirençleri güç harcadığı için bu yol vericilerin yol verme ekonomileri düşüktür.
Üç fazlı ASM motorlara bir
kademe dirençle yol veren ve
motorun dönüş yönünü değiştiren
kumanda ve güç devresi
55
Elektromekanik Kumanda Sistemleri / Ders Notları
Şekil: Bir kademeli yol verme kumanda şeması
Yz: Hakan ATABEK
Şekil: İki kademeli yol verme kumanda şeması
Şekil: Üç kademeli yol verme kumanda şeması
Şekil: Bir, İki ve Üç kademeli
yol verilen asenkron motorların
güç devreleri
56
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
8.5. SEKONDER DİRENÇLE YOL VERME (ROTORU SARGILI ASENKRON MOTORLARA)
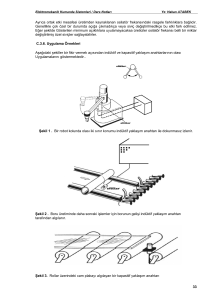
Şekil: Rotoru sargılı asenkron motora, bir kademeli dirençle yol verme, otomatik kumanda ve
güç devresi
Şekil: Rotoru sargılı asenkron motoru iki yönde çalıştırma, iki kademe dirençle yol verme ve dinamik
frenleme ile durdurma kumanda ve güç devresi
8.6. REAKTANSLA YOL VERME
Reaktans: XL = W.L = 2π.f.L bağıntısı ile hesapedilir. Alternatif akıma karşı gösterilen zorluktur.
Reaktansla yol verme işlemleri sadece alternatif akım motorlarına yol verme işleminde kullanılır.
Çünkü doğru akımda reaktans sıfır olduğu için XL = 2π.f.L = 0 olur.
57
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Üç kademe reaktansla yol verme :
Bobin aniden kısa devre edildiği zaman bobindeki self EMK’ti sebebi ile kontaktörlar kısa zamanda
hasar görür. Bu nedenle kontaklara seri direnç bağlanarak sargıdaki enerji sönümüne kavuşturulur.
Reaktanslara, reaktör ismi verilir. Standart reaktörler %65-%80hat gerilimi veren iki kademeli ve %50 %65 - %80 hat gerilimi veren üç kademeli olarak imal edilirler.
Yol verme anındada, tek kademeli olarak devreye bağlanırlar ve belirli zaman sonundada, otomatik
olarak devreden çıkarılırlar. Motorun özelliğine göre sadece bir kademesi kullanılır. Tamamı devreye
sokulursa şebeke geriliminin %50’sini motor sargısına verir. %65 kademede iken kullanılırsa şebeke
geriliminin %65’ini motor sargılarına verir. %80’lik kademede ise şebeke geriliminin %80’înini motora
aktarır.
8.7. OTO TRANSFORMATÖRLERLE YOL VERİCİLER
Oto transformatörlü düşük gerilim yol vericileri, primer dirençli yol vericilere benzer. Ve özellikle sincap
kafesli AA motorlarında darbe akımı sınırlamak yada çalıştırılan makine üzerindeki yol verme gerilimini
azaltmak için kullanılır. Bu tip yol vericilerde motorun yol verme gerilimini düşürmek için motorlarla
besleme hattı arasında oto transformatörleri kullanılır. Motoru hat geriliminin yaklaşık %50–%65 i ve
%80 i ile çalıştırabilmek için oto transformatörlerinde kademe uçları bulunur.
Motorların çoğu hat geriliminin %65 inde yol almaya başlar. Bu değerde yeterli yol alma torkunun elde
edilmediği durumlarda %80’lik kademe kullanılabilir. Yol verme transformatörleri indüktif yükledir ve bu
nedenle güç katsayısını etkiler. Bu yol vericiler yol alma süreci uzun makinalar için uygundur.
58
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Hızlanma süresince motor bağlantı uçlarındaki gerilimi düşürmek için kullanılan oto transformatörlü
yol vericiler de genellikler açı üçgen bağlı iki adet oto transformatörü bulunur.
Şekil : İki kademeli oto transformatörlerinde üç fazlı Asm’a yol vermeye ait kumanda ve güç devresi
Asenkron motorlara omik dirençlerle ve reaktans bobinleri ile yol vermek yüksek kalkınma akımı
nedeni ile kısa bir süre içerisinde de olsa direnç veya reaktans bobini üzerinde çok yüksek bir güç
kaybı meydana gelir. Bu kaybı önlemek için asenkron motorlara oto transformatörü ile yol verilir.
Oto transformatörü kullanılmasının diğer bir nedeni ise; motor akımının büyük olmasına rağmen,
şebekeden çekilen akımın küçük olmasıdır. Yani bunun faydası; yol verme anında yüksek kalkınma
akımı nedeni ile şebekede meydana gelecek şok tesirini ve hatlardaki gerilim düşümünü kısmen
önlemektir. Oto transformatörleri % 65-% 80 şebeke gerilimi veren iki kademeli veya % 50-% 65-%
80 şebeke gerilimi veren üç kademeli olarak imal edilir.
59
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
8.8.PARÇALI SARGILI MOTORLARA YOL VERME
Parçalı sargılı motorlar yapı olarak sincap kafesli motorlara benzerler. Ancak parçalı sargılı motorlarda
düşük yol alma torku elde etmek üzere besleme kaynağına sıra ile bağlanabilen iki adet özdeş sargı
bulunur. Bu sargılar paralele çalışacak şekilde tasarlanmıştır. Yol alma sürecinde sargıların sadece
yarısı besleme gerilimine bağlandığı için bu yöntem, parçalı sargılı olarak tanımlanır. Her bir sargının
bağlantı uçlarını dışarı çıkararak motor üreticileri, sargıları paralel bağlanabilme olanağı vermiştir.
Motorun tasarımına bağlı olarak parçalı sargılı motorların sargıları yıldız ya da üçgen bağlanabilir.
8.8.1 İki Kademeli Yol Verme
60
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
İki kademeli yol verici de iki kontaktör bulunur. Bir kontaktör sargılı motor sargısının bir sargısını
kontrol eder. Kontaktörler sıra ile enerjilendiğinde motor sargısının biri enerjilenir ve kısa bir süre sonra
birinci sargı ikinci sargıya paralel bağlanır. Motor bir sargısı ile yol aldığı zaman normal akımın
yaklaşık üçte birini çeker.
8.8.2 Üç Kademeli Yol Verme
8.9. YILDIZ ÜÇGEN OTOMATİK YOL VERİCİLER
Hiçbir dış elemana gerek duymadan darbe akımını azaltmanın en çok kullanılan şekli yıldız-üçgen yol
vermedir. Yıldız üçgen motorlarda iç sargının her birinin her iki bağlantı ucu da dışarı çıkarılır. Motor
önce yıldız olarak yol alır ve üçgen bağlanarak normal çalışmasını sürdürür. Motor yıldız bağlantı faz
bobinleri √3 kat daha az bir gerilimle çalışır. Yol alma akımı da yaklaşık olarak üç kat azalır. Yıldız
bağlı olan motor düşük gerilimle yol almaya başlar. Uygun bir anda üçgen bağlantıya ve normal
gerilime geçilir.
Şekil: Bir kumanda merkezli yıldız/üçgen yol verme devre şeması
61
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Şekil: İki kumanda merkezli yıldız/üçgen yol verme devre şeması
Şekil: İki kumanda merkezli ( Uzaktan Kumanda )yıldız/üçgen yol verme ve devir yönü değiştirme
devre şeması
62
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Şekil: Yıldız üçgen yol verilen üç fazlı asenkron motorlarda kompanzasyon uygulaması
Sonuç :
¾
¾
¾
Yıldız bağlantıda bir bobinin gerilimi faz geriliminin √3’le biri, bobin akımı faz akımıdır.
Üçgen bağlantıda bir bobinin gerilimi faz gerilimine eşit, faz akımı ise bobin akımının √3 katı
fazladır.
Bu sonuçlara göre yıldız bağlantıda bobinde √3 kat az bir gerilim kullanılırken, çekilen akım
da üçgende devre den çekilecek akımdan 3 kat az olur.
Asenkron motorlarda hız frekans ve kutup sayısına bağlı olduğundan, hem yıldız hemde üçgen
bağlantıda hızlar sabittir. Yıldız ve üçgen bağlantıda çekilecek akımlar farklı olacağından aşırı akım
röleleri hatta değil bobinlere seri bağlanmalıdır ve sargı akımına göre değeri seçilmelidir.
Şekil: 3 fazlı ASM’a otomatik yıldız-üçgen yol veren ve motorun dönüş yönünü değiştiren devre.
8.9.1 Kapalı Geçişli Yol Verme
R dirençleri motorun yol alma durumundan normal çalışma durumuna geçişi sırasındaki açık devre
durumunu önler. Kapalı geçişli yol verme de, yıldızdan üçgen bağlantıya geçerken motor besleme
hattından ayrılma. Açık geçişli yol vermede yol verici motoru ani olarak dereden çıkarır ve hemen
63
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
sonra üçgen olarak yeniden bağlar. Bir çok uygulamada açık geçiş uygulanırken bazı tesislerde
besleme hatlarında arızalara neden olmamak için kapalı geçiş kullanılır. Kapalı geçiş yol verici
devresine üç kutuplu bir kontaktör ve 3 direnç ekleyerek yapılır.
8.10. FREKANS DENETLEYİCİLERLE YOL VERME VE HIZ KONTROLÜ
9.HIZ DENETLEYİCİLERİ
9.1. ÇOK DEVİRLİ ASENKRON MOTORLAR
Bir motordan iki ayrı devir sayısı elde etmek için iki yol vardır. Bunların birincisinde; motorun
statorunda hem düşük hız için ve hem de yüksek hız için iki (2) ayrı sargı bulunur. Düşük hız devresi
devreye bağlandığında motor düşük hızda ; yüksek hız sargısı şebekeye bağlandığında motor yüksek
hızda çalışır.
Sargılardan birisi şebekeye bağlandığında diğer sargı trafo özelliği gösterir. Bu sebepten boşta kalan
sargının uçları katiyen kısa devre olmamalıdır ve izole edilmelidir.
64