Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Ayrıca ortak etki mesafesi üretimden kaynaklanan osilatör frekansındaki rasgele farklılıklara bağlıdır.
Genellikle çok özel bir durumda açığa çıkmadıkça veya siviç değiştirilmedikçe bu etki fark edilmez.
Eğer şekilde Gösterilen minimum açıklıklara uyulamayacaksa üreticiler osilatör frekansı belli bir miktar
değiştirilmiş özel siviçler sağlayabilirler.
C.3.6. Uygulama Örnekleri
Aşağıdaki şekiller bir fikir vermek açısından indüktif ve kapasitif yaklaşım anahtarlarının olası
Uygulamalarını göstermektedir..
Şekil 1 . Bir robot kolunda olası iki sınır konumu indüktif yaklaşım anahtarı ile dokunmasız izlenir.
Şekil 2 . Boru üretiminde daha sonraki işlemler için borunun gelişi indüktif yaklaşım anahtarı
tarafından algılanır.
Şekil 3. Rollar üzerindeki cam plakayı algılayan bir kapasitif yaklaşım anahtarı
33
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Şekil 4. İki kapasitif yaklaşım anahtarı PVC cidarların arkasından tank seviyesini algılar ve kontrol
eder.
Şekil 5. İndüktif yaklaşım anahtarı ile makine hızı izleme. Diskteki her diş dokunmadan ve doğrudan
algılanır ve böylece ayrıca ek mekanik bağlantıya gerek kalmaz.
Şekil 6. İki kapasitif yaklaşım anahtarı ile silo seviye kontrolü.
34
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Şekil 7. Otomobil Montaj hattında kullanılan indüktif yaklaşım anahtarı
Şekil 8. İndüktif yaklaşım anahtarı ile devir ölçümü
Şekil 9. Otomobil montaj hattında kullanılan indüktif yaklaşım anahtarı
35
Elektromekanik Kumanda Sistemleri / Ders Notları
Şekil 10. İndüktif yaklaşım anahtarının
limit siviç olarak kullanılması
Yz: Hakan ATABEK
Şekil 11. İndüktif yaklaşım anahtarı ile metal kapak
kontrolü
Şekil 12. Kapasitif yaklaşım anahtarı ile siloda dolum kontrolü
36
Elektromekanik Kumanda Sistemleri / Ders Notları
Şekil 13. kapasitif yaklaşım anahtarı ile seviye
kontrolü
Yz: Hakan ATABEK
Şekil 14. indüktif yaklaşım anahtarı ile
elevatörde kayma ve dönme hızı tespiti
Şekil 15. manyetik yaklaşım anahtarı ile pnömatik silindirin pozisyon kontrolü
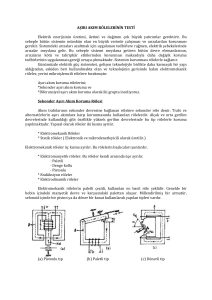
5. KORUYUCU VE KONTROL AYGITLARI
Şebekede ve kumanda devrelerinde meydana gelen değişmeler ve arızalar, motorlara, motorların
çalıştırdığı aygıtlara ve devrelerine zarar verir. Örneğin üç fazlı dağıtımda bir fazın kesilmesi veya faz
sırasının değişmesi, kumanda devrelerinde , güç devrelerinde ve hareket eden aygıtlarda birçok
sakıncalar yaratır. Bu sakıncaları önlemek, önceden fark edebilmek ve kontrol altına almak için,
çeşitli koruyucu ve kontrol elemanları kullanılmaktadır. Bu aygıtlar genelde birer küçük elektronik
rölelerdir. Bu röleler genelde akım, gerilim, seviye ,basınç, ısı, devir v.b. sistemin temel bilgilerini
alarak bunlardaki değişimleri kontrol ederek , herhangi bir değişim anında sistemi açmakta, ikaz
37
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
vermekte veya arıza sonrası sitemi tekrar devreye alma gibi görevleri yerine getirmektedirler.
Genelde Kontrol sistemlerinde kullanılan koruyucu ve kontrol elemanları aşağıdaki gibidir .
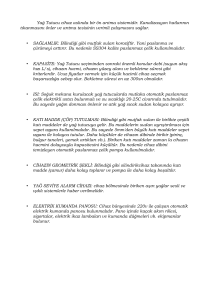
5.1 Düşük Gerilim - Aşırı Gerilim Rölesi
Şebekede tek faz üzerinden düşük gerilim kontrolü yapar. 160 V – 220 V arası bir değere set edilebilir.
Gerilim set edilen değerin üzerinde ise röle çıkış kontağı çekilir. Gerilim ayar değerinin altına düşünce
3 sn lik bir gecikme ile çıkış kontağını bırakır. Röle üzerindeki U ; kırmızı ledi işletme geriliminin
varlığını, R; yeşil ledi ise, kontağın konumunu gösterir.
Tek fazlı aşırı gerilim rölesi ise 220V -270 V arası bir
değere set edilir. Gerilim set edilen değerin altında ise röle
çıkış kontağı çekilidir. Gerilim olan edilen değerin üzerine
çıkınca 3 sn’lik bir gecikme ile çıkış kontağını bırakır. Gerilim
tekrar ayar edilen değere düşerse çıkış kontağı tekrar çekili
duruma gelir.
5.2. İmpuls Kumandalı Zaman Rölesi
Bu röleye işletme gerilimi uygulandığı zaman röle hiçbir işlem yapmaz. Çıkış kontağı çekili değildir.
Röleye impuls girişinden bir impuls gerilimi uygulandığı anda röle kontağı çeker ve zaman sayma
işlemi başlar. Ayarlanan T1 süresi dolunca röle kontağı bırakır. Zaman sayma işlemi uygulanan impuls
zamanından bağımsızdır. Bu işlemin iki tipi vardır.
38
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
5.3. Sıvı Seviye Rölesi
Endüstriyel tanklarda, su depolarında, artezyen kuyularında ve pompa motorlarının kumanda edilmesi
için kullanılır. Röle 3 adet elektrot kullanılarak tankların depolarının veya kuyuların pompa motorları ile
doldurulmasını veya boşaltılmasını sağlar. Röle üzerinde 5 kΩ, 50 kΩ arası ayarlanabilen bir
hassasiyet skalası vardır. İletkenliği fazla olan sıvılarda bu ayar düşük değerlere, iletkenliği az olan
sıvılarda ise yüksek değerlere ayarlanır. Böylece elektrot ve onları bağlayan kablolardaki rutubet ve
ıslaklıktan dolayı yanlış kumanda verilmesi önlenir. Elektrot gerilimleri A.C. olduğu için, elektrot
korozyonları ve kimyasal aşınmalar önlenmiştir.
39
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
5.4. Zaman Gecikmeli Düşük Gerilim Bırakma Rölesi
Uzun süreli bir enerji kesintisinden sonra ani olarak enerji
geri gelirse makinanın zarar görme ve çalışanların kazaya
uğrama ihtimalleri vardır. Bu nedenle, bu durumlarda
motorların hemen çalışmaya başlamasını önleyen elemanlar
kullanmak gereklidir. Bu elemanlar düşük gerilim röleleridir.
Zaman gecikmeli DG bırakma rölesinde R2 ve R1 direnci
birlikte kullanılırsa 2 sn sadece R2 kullanılırsa 4 sn gibi bir
gecikme olur. R2 direncinin değeri öyle ayarlanmıştır ki röle
bobininden geçen akım rölenin platini çekmesine yetmeyecek
kadar düşüktür. Başlatma butonuna basıldığında R2 devre
dışı bırakılır ve röle bobinine tam gerilim uygulandığından
röle enerjilenir.
Başlatma butonu bırakıldığında R2 direnci tekrar röle bobini ile seri duruma geçer. Ancak röle
enerjilendikten ve platini çektikten sonra düşük bir gerilimle platini çekili tutabildiğinden röle enerjili
konumda kalır. Başlama kaynağının gerilimi düşer yada kesilirse diyot üzerinden dolan C1 elektronik
kondansatörü, bobini enerjili tutmak üzere kontrol rölesinin bobini üzerine boşalmaya başlar.
Kondansatör boşalmaya başlamadan önce kaynak gerilimi normal değerin %85’ine geri çıkarsa
manyetik yol verici otomatik olarak tekrar kapanır. Eğer gerilim tekrar normale dönmezse kontrol rölesi
açılır.
5.5. Faz Sırası Rölesi
3~ alternatif akım metoduyla çalışan makine ve aygıtlarda faz sırasının önemi çok büyüktür.
Asansörlerde, hava kompresörlerinde, pompa sistemlerinde motorların istenilen yönde dönmesi
istenir. Herhangi bir nedenle giriş fazları yer değişirse motor yönü değişir ve bu durum önemli
sakıncalar oluşturur. Uygulamada gerilim düşümü ilkesine göre çalışan ve elektronik faz sırası röleleri
vardır.
5.5.1.Kondansatörlü ve Omik Dirençli Faz Sırası Röleleri
Şekildeki gibi gerilim düşümü ilkesine göre çalışan faz sırası rölesinde uygun değerde bir kondansatör,
bir omik direnç ve bir röle kullanılır. Bu üç direnç kendi aralarında yıldız bağlanır. Diğer uçlara da 3 ~
uygulanır. Eğer fazların sırası uygunsa FSR rölesinde normal gerilim düşümü olur.
FSR rölesi enerjilenir ve kumanda devresinin girişinde bulunan normalde açık kontağı kapanır. Kontak
kapanınca sistem çalışmaya hazırdır. Yıldız noktasına nötr hattı bağlanmadığından fazların sırası
değiştiğinde, elemanlarda düşen gerilimde değişir. Direnç kondansatör ve rölelerin değerleri uygun
olarak alındığından, bu durumda FSR faz sırası rölesinde düşen gerilim küçülür. Faz sırası rölesi
enerjilenemez. Kumanda devresinin girişinde bulunan FSR kontağı açık kalır ve kumanda devresi
çalışmaz.
40
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
5.5.2. Elektronik Faz Sırası Rölesi
1 – 2 Normanlde kapalı
3 – 4 Normalde Açık
Röle girişine gelen R S T fazları sırasına
göre sıralanınca R ledi yeşil yanar ve
fazların doğru sıralandığı bildirir. Bu
durumda
çıkış
rölesi
sükunet
durumundadır. Herhangi bir nedenle
sistem girişinde fazların değişirse röle
kontağı çeker, bu kontak üzerinden
devrede olan motor kontaktör birbiri
devre dışı kalmış olur.
5.6. Faz Kesilme Röleleri
1–2NC
2–3ND
Faz koruma röleleri motorun herhangi bir
nedenle iki faza kalması durumunda, motor
kontaktörü
devreden
çıkarak
motoru
yanmaktan korur. Röle aynı zamanda fazlar
arası değişikliğe karşıda duyarlıdır. Fazlar
arası gerilim değişikliği %10 ‘a ulaşırsa motor
yine devre dışı bırakılır. Geçici şebeke
dalgalanmalarında etkilenmemek için, röle
takriben 3 saniyelik gecikme ile çalışır.
Böylece çok kısa süreli faz kesilmeleri veya
şebeke dalgalanmalarında gereksiz açmalar
önlenir. Her üç faz mevcut ve gerilimler
dengeli ise röle kontağı çekilidir ve 2 – 3
kontakları kapalıdır.
Motor kontaktör bobini bu kontaklar üzerinden devresini tamamlar. Cihaz üzerindeki U kırmızı ledi
işletme geriliminin varlığını R yeşil ledi ise yandığı zaman her üç fazın varlığını, dolaysıyla çıkış
rölesinin çekili olduğunu gösterir.
41
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
5.7. Termistör Girişli Faz Koruma Rölesi
Bu röleler aynen faz koruma
rölelerinin fonksiyonlarına sahiptir.
Ayrıca motor sargıları arasına
yerleştirilen PTC tipi termistörler için
P1 – P2 termistör girişleri vardır. PTC
türü
termistörler,
tanımlanmış
sıcaklık aralığında direnci sabit olan
kritik sıcaklığa ulaştığında direnci
aniden yükselen elemanlardır. Motor
sargıları
arasına
yerleştirilen
termistörlerde motor sargı sıcaklıkları
doğrudan kontrol edilip röle ile
motora açma kumandası verilir.
5.8. Uyartım Devresi Rölesi
DA motorlarına devir sayısı uyartım akımıyla ters orantılı olarak değişir. Örneğin uyartım akımı
azaldığında DA motorun devir sayısı artar. Herhangi bir nedenle uyartım sargısının bir ucu açılırsa,
uyartım akımı sıfıra düşer. Bu durumda motorun devir sayısı çok fazla yükselir. Sonunda sigortalar
atar veya motor parçalanır. Sakıncayı önlemek için uyartım devresi röleleri kullanılır.
UDR ’ler şönt sargıya seri bağlanır. Başlatma butonuna
basıldığında M kontaktörü enerjilenir. Endüvi ve şönt
sargı şebekeye bağlanır. Şönt sargıdan geçen akım UDR
‘yi enerjiler, dolayısıyla başlatma butonu mühürlenmiş
olur. Motor çalışırken uyartım devresi açılacak olursa
uyartım akımı sıfır olur, devir sayısı yükselmeye başlar,
bu durumda UDR ‘nin enerjisi kesilir ve M kontaktörü
devreden çıkarak sistemi durdur.
n=
42
U − I A xRU
Kxϕ
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
5.9. Yıldız Üçgen Rölesi
Klasik yıldız-üçgen yol verme uygulamalarında
bir adet zaman rölesi kullanılır. Kontaktörlerin
emniyetli çalışması için oldukça karmaşık
bağlantıların yapılması gerekir. Yıldız-Üçgen
rölesi, karmaşık bağlantıları ortadan kaldırır. Yol
verme süresi röle üzerinden ayarlanır. Yıldızdan
üçgene geçişte 200 mili saniyelik bir geçikme
konulmuş ve kontaktörler emniyete alınmıştır.
Röle üzerinde Yıldız çalışma konumunu gösteren
λ kırmızı ledi üçgen çalışma konumunu gösteren
Δ yeşil ledi vardır.
5.10. Dozaj lama Röleleri (Çift Zaman Ayarlı)
Bu rölelerin çalışma ve durdurma zamanları
birbirinden
tamamen
bağımsız
olarak
ayarlanabilir. Belli zaman aralıklarında belli
sürelerde devamlı çalışması istenen sistemlerde
kullanılır. (Yağlama pompaları, Havalandırma,
Bahçe sulaması vs.) işletme gerilimi uygulanınca
çıkış kontağı çeker. Ayarlanan T1 süresi boyunca
çekili kalır, sonra bırakır. Ayarlanan T2 süresi
boyunca bırakık kalır ve teker çeker. İşletme
gerilimi mevcut olduğu sürece bir çalışma şekli
devam eder.
5.1. Kompanzasyon Rölesi (Asenkron Motorlarda Kompanzasyon )
Şekil : Yıldız üçgen yol verilen bir asenkron motora kompanzasyon uygulması
43
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Şekil: Otomatik kompanzasyon rölesi devre bağlantı şeması
Şekil : Değişik kompanzasyon röleleri
Grafik : Motorların güç ve devir sayılarına göre kondansatör gücü seçimi için hazır abak
44
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
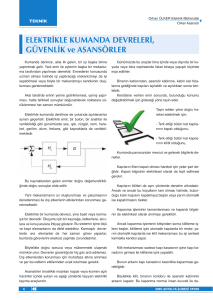
6. PAKET ŞALTER
Bir eksen etrafında döndürülebilen arka arkaya dizilmiş birçok dilimden oluşan ve çok konumlu olan
şalterlere paket şalter denir. Ufak güçlü ve basit aygıtların çalıştırılmaları ekonomik olması dolayısıyla
paket şalterlele yapılır. Paket şalterlerde her dilimde 1,2,3 veya 4 kontak kullanır. Arzulanan kontak
sayısını elde etmek için uygun sayıda dilim arka arkaya dizilir. Böylece paket şalterlere istenildiği
kadar kontak konabilir. Paket şalterlerin kumandası üzerlerinde bulunan kolu çevirmekle yapılır. Kol
azar azar dönecek şekilde yapılırsa, paket şalter çok konumlu olabilir.
Şekilde üç konumlu paket şalterin yapısı
görülmektedir. Paket şalterin her dilimi sabit
ve hareketli parçalar olmak üzere iki
kısımdan oluşur. Sabit parça üzerine
kontaklar yerleştirilir. Hareketli eksantrik
girintili ve çıkıntılı parça sayesinde kontaklar
açılır kapanır.
45
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Paket şalterler için çizilen diyagramlarda
konumun
yazıldığı
satırla
kontağın
gösterildiği sütunu kesiştiği kare ya boş
bırakılır veya içine bir çarpı işareti konur. Boş
kare şalteri o konumla ilgili kontağın açık
olduğunu, çarpı kapalı olduğunu ifade eder.
Kontaklar arasındaki çizgi kontağın birinci
konumdan ikinci kontağa geçerken hiç
açılmadan seçtiğini belirtir. Çizgi olmazsa
birinci konumdan ikinci konuma geçerken
önce kapalı kontak açılır sonra tekrar
kapanır.
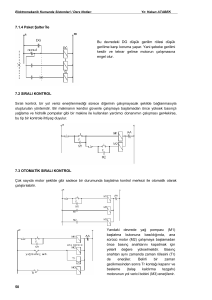
Paket şalterlerin elektrik devresinde bağlantısı şekildeki gibi gösterilir. Her iki şekilde de 3 konumlu 3
kontaklı yaylı paket şalter kullanılmıştır. Bu paket şalter ile üç sinyal lambasının kumandası
yapılacaktır. Paket şalterin “O” konumunda 3 – 4 kontakları kapalı olduğundan yalnız L2 lambası
yanar. “1” konumunda ise, L2 söner L1 ve L3 yanar. “2” konumunda ise yine L1 veL3 yanar fakat L1
sürekli yanar. L3 önce söner sonra tekrar yanar. Paket şalter 2 konumuna çevrildikten sonra serbest
bırakılırsa, tekrar 1 konumuna geri döner.
Bazı durumlarda çok konumlu paket
şalterin bağlantı şemasını çizmek
oldukça zor olur. Bu gibi durumlarda,
kontakların açılıp kapanmaları ayrı bir
diyagramla gösterilir.
46
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
7. UZAKTAN KUMANDA
Bir sistemi bir veya birden fazla başlatma butonuyla
başlatılıp, birden fazla durdurma butonuyla durduruluyorsa
böyle bir çalışmaya uzaktan kumanda adı verilir. Örneğin
uzaktan kumanda sistemleri, bir yerden başka yere yük
almaya veya yüklenmeye yarayan taşıyıcı bant motorlarını
kontrol etmede kullanılır.
Şekil : 3 ayrı noktadan Uzaktan kumandalı
R
MP
6/25 A
O.L
STOP1
STOP1
R
İLERİ
JOG-1
İLERİ
JOG-2
İLERİ
START-1
JF
İLERİ
START-2
JF
F
JF
F
İLERİ
JOG-1
İLERİ
JOG-2
GERİ
START-1
JR
GERİ
START-2
JR
R
JR
Şekil : Uzaktan kumandalı kesik-kesik çalıştırmalı (yardımcı kontaklı) elektriksel kilitlemeli devir yönü
kumandası için gerekli kontrol devresi
R
MP
6/25 A
O.L
STOP1
STOP1
İLERİ
JOG-1
İLERİ
JOG-2
GERİ
JOG-1
GERİ
JOG-2
İLERİ
START-1
İLERİ
GERİ
START-2 START-1
JF
GERİ
START-2
JR
JF
JR
Şekil : Uzaktan kumandalı , kesik-kesik çalıştırmalı (yardımcı röleli) buton kilitlemeli devir yönü
kumandası için gerekli kontrol devresi
47
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
7.1 DÖNÜŞ YÖNÜ DEĞİŞTİRME
3 fazlı asenkron motorların dönüş yönü herhangi iki fazın yeri
değiştirilerek gerçekleştirilebilir. Bu işlemi gerçekleştirebilmek için, biri
düz yön diğeri ters yön olmak üzere iki adet kontaktör kullanılır.
Kontaktörlerin aynı anda enerjilenmeleri ve kontakların kapatarak
kısadevre ye neden olmamaları için kilitleme denilen teknik kullanılır.
Temel olarak 4 kilitleme tekniği vardır.
1 fazlı asenkron motorlarda ise, rotorun dönmesini sağlayan yardımcı
sargının veya ana sargının manyetik alan yönü değiştirmek ile
gerçekleştirebiliriz.
Yandaki şekilde, ani devir yönü değiştirebilmek için santrifüj anahtarın
uçlarını kısa devre edebilecek özel düzenlemeler yapılır.
7.1.1. Mekaniksel Kilitleme
İleri yön ile geri yön kontaktörleri arasındaki mekaniksel kilitleme üretim sırasında gerçekleştirilir. Bu
kilitleme her iki kontaktöründe aynı anda enerjilenmesi durumunda bir kontaktörü kilitleyerek kısadevre
oluşmasını önler. Enerjilenme ilk bobin mekaniksel olarak bir kol hareket ettirerek diğer bobinin
enerjilenmesini ve kontaklarını kapatmasını önler. Böyle bir sistemde motor ters yöne dönmeden
motor durdurulabilir.
7.1.2 İtmeli Buton Kilitlemesi
Buton kilitleme, iki yol verici bobinin aynı anda enerjilenmesini önleyen elektriksel bir yöntemdir. Bu
sistemde motorun yönünü değiştirmek için durdurma butonuna basmaya gerek yoktur. Motorların sık
sık ani olarak yön değiştirmeleri istenmez. Ani yön değişmeleri aşırı akım röleleri ve sigortaların
ısınmasına neden olabilir bu da motorun devre dışı kalmasına neden olur. Bu nedenle motoru ters
yönde çalıştırmadan önce motor durdurulmalıdır.
48
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Şekil: Buton kitleme kumanda şeması
Şekil: Buton kitleme değişik bağlantı
Şekil: Uzaktan (iki ayrı noktadan) kumanda ve buton kitleme
7.1.3 Yardımcı Kontak Kilitlemesi (Elektriksel kitleme)
Böyle bir devrede yön değiştirme yol vericisinin ileri
yön ve geri yön kontaktörlerinin devrelerinde
normalde kapalı yardımcı kontaklar bulunur. Bir
fazlı motorların devir yönünü değiştirmek için
çalıştırma yada yardımcı sargılardan bir tanesinin
bağlantı uçları birbiriyle yer değiştirir. Her iki
sargının da uçlar aynı anda değişmez.
Şekil: Uzaktan kumandalı (iki noktadan)
Şekil: Bir fazlı motorun devir yönünü değişimi
49
Elektromekanik Kumanda Sistemleri / Ders Notları
50
Yz: Hakan ATABEK