Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
Elektrik motorlarında yol verme işlemi
Motorun rotor hızının sıfırdan anma hızına hızına ulaşması için yapılan işlemdir. Durmakta olan motorun stator
sargılarına gerilim uygulandığında endüklenen zıt emk sıfırdır. Çünkü rotor hareketsizdir. İlk anda çekilen akım kısa
devre akımıdır ve bu akım çok yüksektir. Bu akımın rotor sargılarında oluşturduğu kuvvet ile yol verme momenti
üretilir ve rotor bu momentin etkisiyle dönmeye başlar. Zamanla çekilen kısa devre akımı motor dönmeye
başladıkça küçülür. Motorun miline bağlı ve motor tarafından sürülmekte olan makinanın veya sistemin karşıt
momenti motor tarafından üretilen momente eşit olunca motor ve motorun sürdüğü bu sistem sabit hızda
dönmeye devam eder. Bu işleme yol verme işlemi denir.i
ASM Yolverme Yöntemleri
Motorlar yol alırken, anma akımlarından daha fazla akım
çekerler. Aşırı yol alma akımı şebekede, devrede ve motorda
birçok sakınca oluşturur.
Elektrik İç Tesisler Yönetmeliğinin 26, 27, 28 ve 52.
Maddelerinde motorlarla ilgili aşağıdaki hükümler yer
almaktadır.
Madde 26 - MOTORLAR
Değişik fıkra: RG 30/11/1995- 22479) Anma gücü 0.5 kW geçmeyen bir fazlı motorlar, elektrik priz
linyelerine bağlanabilir.
0.5 kilovattan, 3 kW’a kadar olanlar için ayrı bir hat çekilir ve bunlar 22. Maddedeki kurallara uygun olarak bir faz
üzerine bağlanabilir.
Madde 27 - ANMA GÜÇLERİ 3 KİLOWATTAN BÜYÜK OLAN MOTORLAR
Anma güçleri 3 kW’tan büyük olan motorların üç fazlı şebekelere bağlanabilmeleri için üç fazlı olmaları gerekir.
Madde 28 - İZİN VERİLEN GERİLİM DEĞİŞME ORANI
Elektrik şebekelerinde 0.5'den fazla gerilim dalgalanmalarına neden olan tesislerin elektriği kesilir.
Madde 52 – (Değişik ek: RG 30/11/1995- 22479) BAĞLAMA AYGITLARI
b) Yol vericiler ve ayar aygıtları
i) Bu aygıtlar yürürlükteki Türk Standartlarına yada tanınan yabancı standartlara uygun olmalıdır.
ii) Çalışırken ısı çıkaran yol verici ve ayar aygıtları, kullanıldıkları yer izin verilmeyecek derecede ısınmayacak
nitelikte seçilmeli ve yerleştirilmelidir.
iii) Yol verici ve ayar aygıtları, ait oldukları motor ve devrelere uygun boyut ve nitelikte seçilmelidir.
iv) Kendi transformatörü bulunan tüketicilerde doğrudan (direkt) yol verilebilecek en büyük kısa devre senkron
motor gücü tüm işletme yükleri devrede iken, en büyük güçlü motorun devreye girmesi durumunda transformatör
empedansları dahil, yol alan motorda, yol alma akımında bağıl gerilim %15'i aşmamak koşulu ile tüketici tarafında
belirlenir.
Kendi transformatörü bulunmayan tüketicilerde, doğrudan yol verilecek en büyük kısa devre asenkron motor gücü
köy ve benzeri yerlerde 7.5 kW, alçak gerilim şebekesi hava hattı olan kasaba ve şehirlerde 15 kW, alçak gerilim
şebekesi yeraltı kablosu olan kasaba ve şehirlerde 30 kW’tır. Ancak motorun gücü transformatörün gücünün
%10"nu aşamaz.
Yol verme yöntemleri bir başlangıç torku oluşturarak, motoru nominal yükteki hızına ulaştırmak amacıyla motora
yeterli akımı sağlamak için kullanılmaktadır. Her bir metodun kendine göre avantajları ve dezavantajları
bulunmaktadır. Bunların içerisinde en büyük enerji tasarrufunu frekans konvertörleri sağlamaktadır.ii
1. Direkt yolverme: Küçük güçlü motorlar ile tam yükle kalkınan
motorlarda uygulanır.iii En az sayıda
elemandan oluştuğundan maliyeti az ve
bağlantısı kolaydır.
1
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
2. Düşük Gerilimle Yolverme:
Yol alma akımının güvenli sınırlar içinde kalması, motora düşük gerilimle yol vermeyle sağlanır. Düşük
gerilimle başlatma, boşta kalkınan veya en fazla anma yükünün 1/3 yükünde kalkınan motorlara uygulanır.
Tam yükle yol verilen bir motora düşük gerilim uygulanırsa, belirli bir yükü veya gücü karşılamak
zorunluluğunda olan motor, şebekeden normalin üzerinde akım çeker. Düşük gerilimle başlatmanın amacı, yol
almada motorun az akım çekmesini sağlamak olduğundan, tam yükle kalkınan motorlara düşük gerilimle yol
verilmez.iv
Düşük gerilimle yol verme yöntemleri başlıca üç şekilde yapılır.
a) Stator sargılarına seri direnç veya reaktör bağlayarak yol
verme:
2
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
b) Oto transformatörü ile yolverme:
3
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
c) Yıldız-üçgen bağlayarak yolverme:
4
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
v
3. Rotoru sargılı ASM rotor deversine seri direnç bağlayarak yolverme:
5
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
4. Yumuşak Yolverici (Sofstarter) ile yolverme:
Motorlar ilk kalkış anında çektikleri yüksek demeraj akımları nedeniyle hem mekaniksel hem de şebeke
zorlanmalarına neden olurlar. Yumuşak yolverme
cihazları ile basit ayarlar yaparak en düşük kalkış
momentinde motorlara yumuşak yolverme
mümkün olabilmektedir. Yumuşak kalkışta
mekanik ve şebeke zorlanmalarını engeller.
Başlangıç gerilimi %40 - %100, kalkış
süresi 0 - 20 sn, duruş süresi 0 - 20 sn.
arasında ayarlanabilir.
Motor yol aldıktan sonra entegre by-pass
kontakları sayesinde minimum güç kaybı
Pano içinde %70 daha az yer kaplar.
(Yıldız-üçgen çözümlerine göre)
Kolay ve pratik bağlantısı sayesinde işçilik
masrafları azalır.
Termik koruma ( Class 10, 15, 20 ) ve
opsiyonel termistör motor koruma özelliği
ile ilave şalt cihazları kullanmanız gerekmez.
Cihaza entegre edilmiş cihaz koruma aşırı yüklenmeyi engeller.
Polarity Balancing ” özelliği sayesinde daha linear bir yumuşak kalkış yaptırır.
Opsiyonel fan aksesuarı sayesinde cihazın kapasitesi ve sürekliliği arttırılabilir.
3SRW40 serisi 2 fazdan kontrollüdür.
Potansiyometrelerle yolverme zamanı ve yolverme geriliminin kolay ayarlanabilir.
Vidalı ve Cage Clamp bağlantı tekniğine uygundur.
Sirius 3RW40 ve 3RW44 serisi yumuşak yolvericilerin termik olarak koruma özelliği mevcuttur. Diğer
yolvericiler de haricen termik röle ve sigorta ya da termik manyetik şalter (ya da motor koruma şalteri)
kullanmak gerekir.
6
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
7
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
8
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
5. Frekans değiştirici (Inverter) ile yolverme:
Bir indüksiyon motorunun hızı, doğrudan AC
şebekenin frekansı ile orantılıdır. Şebekenin
frekansını ayarlamak mümkün olabilseydi, motorun
hızını da kontrol etmek mümkün olabilecekti.
Frekans konvertörü, motorun hızını kontrol etmek
için kullanılan bir yol verme yöntemidir. Frekans
konvertörleri, sabit frekanslı AC gücün girişini,
değişken frekanslı çıkışa çeviren elektronik cihazlar
olup motora sağlanan elektrik gücün frekansını
kontrol ederek, alternatif akımın döner hızını,
böylece de motorun hızını kontrol edebilmek için
kullanılmaktadırlar.
Parametreler, cihaz üzerindeki Temel Operatör
Paneli (BOP) vasıtasıyla değiştirilebilirler. Makro
seçimleri, parametreler, sürücünün kalkış-duruşrampa süreleri, minimum ve maksimum frekansları
vb. gibi arzu edilen özellikler BOP vasıtasıyla
değiştirilip ayarlanabilirler. Seçilen parametre
numaraları ve bu parametrelerin değerleri seçilen
operatör panelinin ekranında gösterilir.
Notlar
♦ ▲ve ▼düğmelerine anlık olarak basarsanız, değerler kademeli olarak değişir. Düğmeleri basılı konumda
daha uzun bir süre tutarsanız, değerler hızlı bir şekilde düşey formata kayarlar.
♦ Parametre tablolarında: ‘C’ Parametreler, sadece hızlı devreye alma işlemi esnasında (örneğin, P0010 = 0 ise)
değiştirilebilirler. ‘U’ Parametrelerin, çalışma esnasında değiştirilebileceğini gösterir.
9
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
Kalan diğer parametrelerin tamamı yalnızca inverter durdurulduğunda değiştirilebilir.
♦ Sadece okunabilen özellikte olan parametreler, P yerine r ile gösterilirler.
♦ P0010 parametresi, “hızlı devreye alma” işlemini başlatır.
♦ P0010 parametresine erişildikten sonra P0010=0 ayarı yapılmadığı takdirde, inverter
çalışmayacaktır. P3900 > 0 ise, bu fonksiyon otomatik olarak uygulanır.
♦ P0004, fonksiyonlarına göre parametrelere erişimi sağlayan bir filtre görevi yapmaktadır.
Erişim Seviyeleri
P0003 parametresi vasıtasıyla seçilebilen
Standart, Genişletilmiş, Uzman ve Bakım olmak
üzere kullanıcı tarafından erişilmesi mümkün
olan dört seviye bulunmaktadır. Bir çok
uygulama alanı için Standart ve Genişletilmiş
parametreler yeterlidir.
Her fonksiyonel grup içerisinde bulunan
parametrelerin numarası, P0003 parametresinde
ayarlanmış olan erişim seviyesine bağlıdır.
P0003 = 3 yapılarak tüm parametreleri görmek
mümkündür.
10
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
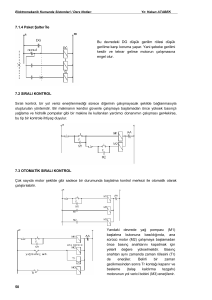
MOTORLARIN DÖNÜŞ YÖNÜNÜ DEĞİŞTİRME:
Üç fazlı asenkron motorun dönüş yönünü değiştirmek için, motora giden üç fazdan sadece iki fazı yer değiştirmek
gerekir. İki kontaktörün aynı anda devreye girip kısa devreye neden olmamak için kumanda devrelerinde bir
kilitleme yapmak gerekir.Kontak emniyetli kilitleme, buton
emniyetli kilitleme, buton+kontak emniyetli kilitleme ve
mekanik kilitlemeler kullanılır
Bir fazlı Kondansatör başlatmalı asenkron motorun dönüş yönünü değiştirmek için, ana sargı yada yardımcı
sargıdan sadece bir tanesinin uçlarını değiştirmek gerekir.
Doğru akım motorunun dönüş yönünü değiştirmek için, endüvi veya uyartım sargılarından sadece bir tanesinin
uçları yer değiştirilmelidir.
Beş kumanda merkezli bir kumanda devresi
tasarlayıp alman normuna göre çiziniz.
11
Elektro-Mekanik kumanda Sistemleri
Öğr.Gör.Hüseyin KÖSOĞLU
Üç fazlı bir asenkron motorun devir yönünü kontak emniyetli değiştiren devrenin güç ve kumanda şemalarını
alman normuna göre çiziniz (eksik çizgi ve simgeleri tamamlayınız)ç
L1 L2 L3
F1
A1
A1
A2
A2
M
Üç fazlı bir asenkron motora yıldız-üçgen yol veren devrenin güç ve
kumanda şemasını alman normuna göre çiziniz.
L1 L2 L3
M
M
3~
i
http://www.elektrikce.com/asenkron-motorlara-yol-verme-yontemleri/ , (son e.t.04.01.2016)
ii
http://www.elsanas.com.tr/downloads/AC%20%C4%B0nd%C3%BCksiyon%20Motorlar%C4%B1nda%20Frekans%20Konvert%C3%B6r%C3%BC%20Kullan%C4%B1m%C4%B1ELSAN%20Teknik%20B%C3%BClteni-FK01.pdf
iii
iv
v
https://library.e.abb.com/public/5e6a1c128ae4fab1c1257b490033f301/1SDC007106G0201.pdf ,(son e.t.04.01.2016)
Ö.BADUR, Elektik kumanda Devreleri, MEB 1978
http://www.siemens-pro.ru/doc/documentation/sirius_en.pdf ,(son e.t.04.01.2016)
12