ESKİŞEHİR-EYLÜL 2013
advertisement

BÖLÜM I
VEKTÖRLER
ESKİŞEHİR-EYLÜL 2013
1
BÖLÜM I
VEKTÖRLER
İÇİNDEKİLER
BÖLÜM
Sayfa
ÖNSÖZ...........................................................................................................................................................................................................
BÖLÜM 1. VEKTÖRLER........................................................................................................................................................
1.1
Giriş.....................................................................................................................................................................................................................
1.2.
Statikte Kullanılan Temel Birimler...............................................................................................................................
1.3.
Vektörel [Sinüs] ve Skaler Çarpım................................................................................................................................
BÖLÜM 2: MOMENT...................................................................................................................................................................
2.1.
Moment Tanımı.....................................................................................................................................................................................
2.2.
Varignon Teoremi [Varignon, 1654-1722] ..........................................................................................................
2.3.
Kuvvet Çifti.................................................................................................................................................................................................
2.4.
Bir Kuvvetin Başka Bir Noktaya Taşınması......................................................................................................
BÖLÜM 3: KAFES SİSTEMLER..................................................................................................................................
3.1.
Mesnetler
3.2.
Kafes Sistemlerin Genel Kriterleri........................................................................................................................
3.4.
Çubuk Kuvvetlerinin Düğüm Dengesi İle Bulunması............................................................................
3.5.
Çubuk Kuvvetlerinin Kesim Metodu [Ritter] İle Bulunması...........................................................
3.6.
Hiperstatik Kafes Sistenler.....................................................................................................................................................
3.7.
Uzay Kafes................................................................................................................................................................................................
....................................................................................................................................................................................................
BÖLÜM 4: İZOSTATİK SİSTEMLERDE V, M, N
4.1.
İzostatik Sistemler ve İşaret Kabulü..........................................................................................................................
4.2.
Kesme Kuvveti İle Moment Arasındaki İlişki....................................................................................................
4.3.
İzostatik Sistemlerin V, M ve N diyagramları...................................................................................................
4.4.
Gerber Kiriş...............................................................................................................................................................................................
BÖLÜM 5: AĞIRLIK MERKEZİ-ATALET MOMENTİ................................................................
5.1.
Ağırlık Merkezi Hesabı [Alanın Birinci Momenti] ........................................................................................
5.2.
Pappus-Guldınus Teoremleri..............................................................................................................................................
5.3.
Statik Moment [Alanın Birinci Momenti] ................................................................................................................
5.4.
Atalet Momenti [Alanın İkinci Momenti (I)] .........................................................................................................
5.5.
Paralel Eksen Teoremi...............................................................................................................................................................
5.6.
Çarpım Atalet Momenti...............................................................................................................................................................
5.7.
Asal Eksen Ve Atalet Momenti.........................................................................................................................................
BÖLÜM 6: KABLOLAR........................................................................................................................................................
6.1.
Kablolar..........................................................................................................................................................................................................
6.2.
Yayılı Yüklü Kablolar......................................................................................................................................................................
6.3.
Tekil Yüklü Kablolar........................................................................................................................................................................
6.4.
Sürtünme......................................................................................................................................................................................................
EKLER ..........................................................................................................................................................................................................
EK.1:Matrisler EK.2: Yaygın Olarak Kullanilan Trigonometrik Bağıntılar
Kaynaklar...................................................................................................................................................................................................
2
ı
BÖLÜM I
VEKTÖRLER
3
BÖLÜM I
VEKTÖRLER
ÖNSÖZ
Mekaniğin bir alt kolu olan statik tüm mühendislik bölümlerinin temel derslerinden birisidir. Statik,
mühendisliğin inceleme konusu sistemlerin hızının sıfır olması durumundaki davranışını inceler.
Bu ders notları dersin anlaşılmasını kolaylaştırmak ve bundan sonra alınacak derslere ve
karşılaşılacak mühendislik problemlerine statik çözüm getirmesi amaçlanmıştır. Kitapların veya yazılı
eserlerin günümüzde ve gelecekte ideal kaynak olması çok iyi bir yazarın kontrolünden çıkması kadar
bunu kullananlarında çok iyi kullanıcı olması ile mümkündür. Eksik konu, düzen, kaynak, veri
bulunabilir. Hatta çok sayıda alıntı olabilir. Çünkü bizim mesleğimizde Archimedes, Galileo Galilei,
Isaac Newton ve benzeri kişilerin eserleri dışında çoğu bu kişilerden alıntı olup sadece sunum farkı
vardır. Nasıl dünya güneş etrafında dönüyorsa yapılan çalışmaların pek çoğu bunların çevresinde
dönüyor. Siz ve sizden önceki öğrenci arkadaşlarımızın katkısı da büyük olmuş ve olmaya devam
edeceğine güvenim tamdır. Sizin bu dersi daha iyi anlamanız için bu notları hazırlamak nasıl bir
mesleki görevimiz ise karşılaştığınız eksiklikleri bildirmenizde sizin bilinçli öğrencilik davranışı
olduğunu unutmayınız. Bu ders notu, konuları örneklerle anlatılması üzerine düzenlenmiştir. Eksik ve
hataların olabileceğini hatırlatır, sizlere yardımcı olması dileklerimizle başarılar temenni ederiz.
4
BÖLÜM I
VEKTÖRLER
BÖLÜM 1: VEKTÖRLER
1.1. GİRİŞ
MEKANİK: Kuvvete maruz duran ve hareket halindeki cisimlerin hareket özelliklerini inceleyen fiziksel
bilimdir. Bu konunun insanlık tarihi kadar eski olduğu aşağıda yapılan çalışmalardan görülmektedir.
“Archimedes, MÖ 287–212, Yunanlı. Türkçe: Arşimed, Arşimet Matematik, Fizik, Astronomi,
Mühendislik. Suyun kaldırma kuvveti, Katı cismin hacmi taşırdığı suyun hacmi kadardır. Pi sayısının
3
2
yaklaşık değeri (π=22/7), Kürenin hacmi (4/3 πr ) ve yüzeyi (4πr ), Archimedes burgusu (Helezon su
pompası), Mancınık, Çukur ayna, Bileşik makaralar, Denge kavramı, Moment kavramı. Sonsuz
küçükler, Ağırlık merkezi kavramı ve hesabı. Çalışmaları Galile, Newton ve Kepler gibi bilim
insanlarına yön vermiştir. Ünlü sözü: Eureka Eureka (buldum buldum!) Bana bir mesnet gösterin
Dünya'yı yerinden oynatayım!”
b
a
P2
P1
P1 a = P2 b
Galileo Galilei, 1564-1642, İtalyan. Türkçe: Galile Astronomi, Fizik, Matematik, Astronomi. Teleskop
ve pusulanın geliştirilmesi, Serbest düşme, Güneş lekelerinin keşfi. Aristo fiziğinin sonunu getirdi.
Aristo’nun evrenin yapısı tanımına karşı çıktı. Dünyanın evrenin merkezi olmadığını, güneş etrafında
döndüğünü savundu. Dinin bilime baskısını reddetti. Engizisyonda yargılandı. Buna rağmen,
mahkemeden çıkarken söylediği “Yine de dünya dönüyor!” sözü ünlüdür.
.
2
Serbest düşme bağıntısı: S=1/2 g t
Modern fiziğin kurucusu kabul edilir. Kiriş eğilme problemini ele alan ilk kişi olmakla birlikte, çekme ve
basınç bölgesinin varlığını ortaya koyamamış, çekme gerilmesinin düzgün yayılı olduğunu
varsaymıştır. Çalışmaları Newton’a ilham verdi.
Her bir noktasal kütle diğer noktasal kütleyi, ikisini birleştiren bir çizgi doğrultusundaki bir kuvvet ile
çeker. Bu kuvvet bu iki kütlenin çarpımıyla doğru orantılı, aralarındaki mesafenin karesi ile ters
orantılıdır:
F=G
m1 m2
r2
5
BÖLÜM I
VEKTÖRLER
Burada:
•
•
•
•
•
F iki kütle arasındaki çekim kuvvetinin büyüklüğü,
G Yerçekimi sabiti,
m1 birinci kütlenin büyüklüğü,
m2 ikinci kütlenin büyüklüğü,
r ise iki kütle arasındaki mesafedir.
SI birimlerinde, F Newton (N), m1 and m2 kilogram(kg), r Metre (m) dir, ve G sabiti yaklaşık olarak 6.67
−12
2
−2
× 10
N m kg ’a eşittir. G ilk kez İngiliz bilim adamı Henry Cavendish tarafından, "Philosophiae
Naturalis Principia Mathematica"nın basımından 111 ve Newton’un ölümünden 71 yıl sonra
ölçülmüştür; bu yüzden Newton’un hesaplamalarının hiçbirinde “G” sabiti kullanılmamış, bunun yerine
bir kuvvete bağıl başka bir kuvvet hesaplamıştır.
Newton’un çekim kanunu Coulomb yasası’na benzer. Newton’un kanunu iki kütle arasındaki çekim
kuvvetini hesaplamak için kullanılırken, benzer şekilde, Coulomb kanunu yüklü iki iletkenin arasındaki
elektriksel kuvvetin büyüklüğünü hesaplamak için kullanılır. Coulomb kanununun denkleminde,
Newton’un denklemindeki kütlelerin yerine yüklerin çarpımını içerir. Böylece, Coulomb kanununa göre
elektriksel kuvvet yüklerin çarpımının aralarındaki mesafeye bölümüyle doğru orantılıdır.
Isaac Newton: 25 Aralık 1642 tarihinde Woolsthorpe kentinde dünyaya gelen Isaac Newton fiziğin en önemli isimleri arasında
yer alır. İlk aynalı teleskopu geliştirmiş, renk ve ışığın niteliğine açıklık getirmiş, evrensel kütle çekimi yasasını ortaya atarak
fizikte devrim gerçekleştirmiştir. Isaac Newton doğumundan 3 ay önce babasını kaybetmiştir. Bir çiftçi ailesinin çocuğu olan
Newton 12 yaşında Grantham'daki King's School'a başlamıştır. 1661'de buradan mezun olan Newton aynı yıl Trinity College'a
girdi. 1665'de buradan mezun olan Newton lisans üstü çalışmalarına başlayacağı sırada veba salgını baş gösterdi ve üniversite
kapatıldı. Bunun üzerine Newton 2 yıl annesinin çiftliğinde kaldı. Burada çalışmalarına devam etti. 1667'de Trinity College'a
öğretim görevlisi olarak geri döndüğünde sonsuz küçükler hesabının ( difransiyel ve integral ) temelini atmıştır. Daha sonra da
ışığın yapısını açıklamış ve evrensel kütle çekimi kanunu ortaya atmıştır. Ancak çekingen olan Newton fizikte devrim yaratacak
bu fikirlerini çok uzun yıllar sonra yayınlamıştır. Örneğin sonsuz küçükler hesabını 38 yıl sonra yayınlamıştır. Lisans üstü
çalışmalarını tamamlayan Newton 27 yaşındayken Cambrige Üniversitesinde matematik profesör olarak getirilmiştir. 1671'de
aynalı teleskopu geliştirerek Royal Society'e seçildi. Ama burada özellikle Robert Hooke tarafından şiddetle eleştirilmesi
Newton'u iyice içine kapanık hale getirdi. Bilim dünyasıyla ilişkisini kesen Newton 1678'de ruhsal bunalıma girdi. Yakın dostu
ünlü astronom Edmond Halley'in çabalarıyla 6 yıl sonra bilimsel çalışmalarına geri döndü. Ve 2 yıl içinde efsanevi yapıtı
Principia'yı yayınladı. Bu eser büyük ses getirdi. Kitabın yayınlandığı yıl kral II. James tarafından Katolik'liği yayma çalışmalarına
direniş gösteren Newton, kral düşürüldükten sonra 1689'da üniversite parlamentosuna girdi. 1693'de yeninden bunalıma giren
Newton'un yakın dostları John Locke ve Pepys ile arası bozuldu. 2 yıl sonra düzeldiyse de bilimsel çalışmalarda eski verimliliğini
gösteremedi. 1699'da darphane müdürlüğüne getirilerek Londra'ya yerleşti. 1701'de profesörlükten ayrıldı. 1703'de Royal
Society'nin başkanı oldu.1704'de sonsuz küçükler hesabını da içeren Optik adlı kitabını yayınlayınca Leibniz arasında tartışma
başladı. Leibniz sonsuz küçükler hesabını Newton'dan 20 yıl önce yayınlamıştı. Newton'un hayatının son 25 yılı bu tartışmalarla
geçti ve 20 Mart 1727'de Londra'da öldü.
Newton’ın en önemli keşifleri cisimlerin hareketlerini inceleyen bilim dalı olan mekanik alanıdır. Cisimlerin herhangi bir kuvvet
etkisi altında olmamaları halinde nasıl hareket ettiklerini tanımlayan “birinci hareket kanununu” Galileo bulmuştu. Gerçekte
elbette cisimler dış kuvvetlerin etkisi altındadır ve mekanik biliminin en büyük sorunu cisimlerin bu koşullarda nasıl hareket
ettiğidir. Bu problem Newton tarafından, klasik fiziğin en önemli temel kanunu olarak tanımlanabilecek ikinci hareket kanunu
ile çözülmüştür. Matematiksel olarak F=ma ifade edilen bu kanun, bir cismin ivmesinin, yani hızındaki değişimin, cisim üzerine
etki eden net kuvvetin cismin kütlesine bölünmesine eşit olduğunu söyler. Bu iki hareket kanununa Newton bir üçüncüsünü ( her
etkiye, yani fiziksel güce, kendisine eşit bir güçle karşı koyulur) , ardından dördüncü ve en ünlü buluşunu, evrensel
yerçekimi kanununu eklemiştir. Isaac Newton şöyle der: Yerçekimi gezegenlerin hareketlerini açıklar ama bu hareketleri kimin
meydana getirdiğini açıklamaz. Tanrı bütün herşeyi yönetir, bilir ve daha neler yapılabileceğini bilir. ”
1. M.Ö.287-212 Archimedes’nin kaldırma kuvveti çalışmaları
2. 1548-1620 Stevinus’nun vektörel toplam
3.
1564-1642 Galileo’nun serbest düşme ile ilgili
4. 1642-1727 Newton’nun yerçekimi
çalışmaları gibi bir çok çalışma bulunmaktadır. Mekanik üç ana kısma ayrılır.
1. Rijit cisimler mekaniği
2. Şekil değiştiren cisimler mekaniği
3. Akışkanlar mekaniği
6
BÖLÜM I
VEKTÖRLER
Derste sadece kendi içinde 2 kısma ayrılan rijit cisimler mekaniği incelenecektir.
1. STATİK (hareket hızı V=0 olan cisimleri)
2. DİNAMİK (ivme ile hareket halindeki cisimleri V≠0)
Mühendislikte özellikle inşaat mühendisliğinde cisimlerin büyük bir kısmı dengede oldukları kabul
edilerek boyutlandırıldıklarından dolayı statiğin çözümlemede payı büyüktür. Statik, hareketsiz haldeki
(dengedeki) bir cismin maruz kaldığı kuvvetleri, dinamik ise hareketten dolayı cisimde oluşan
kuvvetleri belirler. Örneğin bir binanın mühendislik olarak çözümü,
1. İlk önce yapının kendi ve içindeki ağırlıklardan dolayı oluşan eleman veya sistem kuvvetleri
[STATİK],
2. Sonra depremin veya rüzgarın yapıyı hareket ettirmesinden dolayı oluşan kuvvetleri
[DİNAMİK]
bulunarak çözüm yapılır.
1.2. STATİKTE KULLANILAN TEMEL BİRİMLER
1. Uzunluk: Bir noktanın uzaydaki konumunu veya bir cismin boyutlarını ifade eden birim. (m,
cm, mm, inch, km)
Uzunluk ve Zaman Birimleri; Hareketi iyi anlayabilmek için ilk olarak temel uzunluk ve zaman ölçülerini bilmek gerekir. Metre
uzunluğun temel ölçü birimidir. Bir metre, Paris'ten geçen, kuzey kutbu ve ekvator arasındaki boyuna çizgi boyunca ölçülen
uzaklığın on milyonda birisidir. Bu bir metreyi temsil eden metal çubuk Uluslararası Ağırlıklar ve Ölçüler Bürosu'nda
bulunmaktadır. Bir metrenin uzunluğunu belirlemenin bir başka yolu ise, bilimdeki hızlı gelişmelerden birisi olan ışık hızından
yararlanmaktır. Buna göre 1 metre=Işığın boşlukta 1/299,792,458 saniyede yol aldığı mesafedir. Saniye ise, Sezyum
atomunun yayınladığı belli bir dalga boyundaki ışığın, 9192631770 devir yapması için geçen zamandır.
2. Zaman: Statikteki birimler zamandan bağımsız olup, dinamikte önemli bir yer tutar ve cismin
incelemeye konu olan hareket süresi olarak açıklanabilir.
3. Kütle: Maddenin hız değişimine karşı gösterdiği direnç olarak tanımlanır.
Kütle ve ağırlık kavramları aynı şeyler değildir ve birbirlerine karıştırılmamalıdır. Ağırlık ve Kütle Arasındaki İlişki; Ağırlık, kütle
çekimi ile ilgili bir kuvvettir. Dünyanın bir cisme uygulamış olduğu kütle çekim kuvvetine cismin ağırlığı denir. Bu cismin Ay'da
veya Neptün'de olduğu düşünüldüğünde, bu gök cisimlerinin bu cisme uyguladığı çekim kuvvetleri de değişecektir. Bu
nedenle bir cismin madde miktarı (kütle) aynı kalmasına rağmen ağırlığı dünyada, Ay'da veya diğer gezegenlerde farklı
olacaktır. Ağırlığı ölçerken yaylı terazi kullanılırken, kütle ölçmek için eşit kollu teraziler kullanılmaktadır. Bir cisme etki eden
çekim kuvvetinde değişiklik meydana geldiğinde, yayın da uzamasında değişim olmaktadır. Ama çekim kuvveti ne kadar
artarsa artsın cismin madde miktarında değişiklik olmayacaktır. Örneğin kütlesi 10 kg olan bir cisim dünyada tartıldığında 98
N gelirken, bu cismi Ay'da tarttığımızda 17 N gelecektir. Bu da Ay'ın çekim kuvvetinin dünyadan düşük olduğunu
göstermektedir. Uzay mekiği ile Ay'a doğru yolculuk yapan bir astronot düşündüğümüzde, bu yolculuk esnasında astronotun
kütlesi değişmez. Yolculuğun her anında kütlesi eşittir. Astronot dünyadan uzaklaşıp Ay'a yaklaştıkça dünyanın uyguladığı
çekim kuvveti azalmaya Ay'ın uyguladığı çekim kuvveti ise artmaya başlar. Ay ve dünyanın çekim kuvvetlerinin eşit olduğu
noktada astronotun ağırlığı sıfır olur.
7
BÖLÜM I
VEKTÖRLER
Çok düzgün, cilalı, parlatılmış yatay bir yüzey üzerinde, sürtünme kuvvetini önemsemeyerek bir buz kalıbını ittiğinizi
düşünün. Buz kalıbı üzerinde yatay bir F kuvveti uygularsanız, kalıp "a" ivmesi ile hareket edecektir. Kuvveti iki katına
çıkarırsanız ivme de iki katına çıkacaktır. Bu tür gözlemlerden bir cismin ivmesinin, ona etkiyen bileşke kuvvet ile doğru
orantılı olduğu sonucuna varırız. Peki bileşke kuvveti aynı tutarken cismin kütlesini iki katına çıkarırsak ne olur? İvme
yarısına düşer; üç katına çıkarılırsa üçte birine düşer. Bu gözleme göre, bir cismin ivmesinin kütlesi ile ters orantılıdır. Buna
göre Newton'un ikinci yasası şöyle anlatılabilir: "Bir cismin ivmesi, ona etki eden kuvvetle doğru orantılı, kütle ile ters
orantılıdır."
Kütlesi m olan bir cisme dünyanın uyguladığı kütlesel çekim kuvveti cismin ağırlığı olarak adlandırılır ve Fg ile gösterilir. Bu
kuvvet, dünyanın merkezine doğru yönelmiştir ve kuvvetin büyüklüğü cismin ağırlığı olarak bilinir.
Kütle: m Ağırlık: mg=Fg
Newton’un 2. yasasından ΣF=ma, yeryüzü üzerinde ivmenin değeri a=-g olduğundan ağırlık kuvveti ΣF=mg şeklinde yazılır.
Ağırlık, g ye bağlı olduğundan coğrafik konuma göre değişir. Bunun yanında kütle (m) cismin değişmez bir özelliği olduğu için
her yerde aynıdır.
1887 yılında kabul edilen kütle standardı, "1 KİLOGRAM", platin-iridyum alaşımından yapılmış silindirin kütlesi olarak
tanımlanır. Standart metre çubuğu ile birlikte bu silindir Fransa'nın Sevres kentindeki Uluslar arası Ağırlık ve Ölçümler
Bürosu'nda saklanır. Bunların benzerleri her ülkenin kendi ulusal standartlar bürosunda bulunur. Zaman standardı saniyedir.
1960 yılına kadar saniye ortalama güneş günü cinsinden tanımlanmıştır. Bir güneş günü, güneşin gökyüzünde ulaştığı en
yüksek noktadan art arda iki geçişi arasındaki zaman aralığına denir, bir güneş gününün,
1 1 1 1
60 60 24 = 86400
üne saniye adı verilir. 1967 yılında yeni saniye standardı yok edilemez ve kolayca elde edilebilir niteliklerine sahip oldu. "1
SANİYE", sezyum atomunun 9.192.631.770 defa titreşim yapması için geçen zamandır.
4. Kuvvet: Bir cismi harekete zorlayan tepki olarak tanımlanır. Ayrıca bir itme veya çekme
kuvveti olarak da açıklanır. Çeşitleri ise yer çekim kuvveti, elektrik kuvvetleri ve manyetik
kuvvetler olarak sayılabilir.
KUVVET; Günlük yaşantımızda yapılan her işte kuvvet kullanırız. Öğrencinin kitaplarını taşıması, evin kapısının
kapatılması, deredeki suyun akması, bir uçağın havalanması kuvvet gerektiren bazı olaylardır. Bu nedenle yaşantımızda
kuvvet olmadan bir iş yapmamız mümkün değildir. Kainattaki bütün itme ve çekme olaylarının temelinde kuvvet vardır.
Kuvvet, bir cisme temas ederek olabileceği gibi temas etmeden de meydana gelebilir. Dünya ve güneşin birbirlerini,
mıknatısların diğer maddeleri çekmesi ve elektro manyetik çekim temas gerektirmeyen kuvvete örnek verilebilir. O halde
kuvvet; fiziksel, kimyasal ve biyolojik sistemlerin temel özelliğini oluşturan en önemli kavramlardan bir tanesidir. Duran bir
cismi harekete geçiren, hareket halindeki bir cismi durduran, cismin yön ve doğrultusunu değiştiren veya cisimlerin
biçimlerinde değişiklik yapan etkiye kuvvet denir.
Fizik biliminin bir dalı olan mekanik, cisimlerin denge durumlarını ve hareketlerini inceler. Mekaniğin önemli bir konusu
olan kuvvet, ne tür olursa olsun, yani ister cansız bir cisim, ister bir canlı tarafından meydana getirilsin, bir vektör ile gösterilir.
8
BÖLÜM I
VEKTÖRLER
Einstein’ın çalışmalarından bu yana bütün kuvvetlerin tek bir olaydan (elektromagnetik olay)kaynaklandığını düşünürlerse de,
kuvvetler üç kümede sınıflandırılırlar:
1. Uzaktan etkiyen kuvvetler yada alan kuvvetleri;
2. Temas kuvvetleri (ancak iki sistemin bağlantı kurması sonucu ortaya çıkar);
3. Kohezyon (iç tutunum) kuvvetleri (katı cisimlerin bükülmezliğini sağlarlar).
ALAN KUVVETLERİ: Bir cismin her bir öğesinin kütlesi üstüne etkirler; bu nedenle alan kuvvetlerine, bir yüzey üstüne etki
eden temas kuvvetlerinden ayırt etmek amacıyla, kütle kuvvetleri de denir. Alan kuvvetleri, havasız bir ortam içinde bile
birbirinden uzaktaki cisimlere etkirler. Bunlar yerçekimi kuvvetleri, cisimlerin ağırlığı ve elektrostatik, magnetik,
elektromagnetik kuvvetlerdir.
TEMAS KUVVETLERİ: Birbirleri ile ilişki halindeki katıların, içine girilmez ve bozulmaz olma özelliğinden kaynaklanırlar. Her
iki cisme de ortak, küçük bir yüzeyde (temas yüzeyi) gerçekleşen temas sonucu, bu bölgenin yakınlarında, katı hafifçe biçim
değiştirir. Temas kuvvetleri yüzeye dik olduklarında, sürtünmesiz temas söz konusudur. Oysa, bir katı, bir başkasına oranla
yer değiştiriyorsa, temas kuvvetleri, yüzeye oranla eğiktirler: Bu duruma da sürtünmeli temas denir.
KOHEZYON KUVVETLERİ: Katıyı oluşturan atomlar, moleküller yada iyonlar arasında etkirler. Makroskobik düzeyde, bu
kuvvetler temas kuvvetlerini andırırlar, ama atomik ölçekte, alan kuvvetleri niteliğindedirler. Katılar arasındaki temas
etkileşimlerinde temel nitelikte bir rol oynamakla birlikte, açıkça işe karışmazlar.
Newton, bir kuvvetin uygulanmasıyla durumunu değişmeye mecbur edilmediği takdirde, her cisim bulunduğu hareketsiz
halinde veya düzgün hareket halinde kalır. Hareketsiz halde duran ya da sabit bir hızla hareket etmekte olan bir cisme,
herhangi bir başka kuvvet uygulanmadığı sürece bu durağan halini ya da sabit hızlı halini korur. (Otobüs birden durduğunda
yolcuların birden öne doğru savrulduklarına dikkat etmişsinizdir. Savrulmanın nedeni, yolcuların durma anından önceki sabit
hızlı hareketlerini sürdürmeleridir.)
5. Maddesel nokta (partikül): Boyutları ihmal edilebilen ve kütlesi olan nokta.
6. Rijit cisim: Bir çok maddesel noktadan oluşmuş cisim veya bu cisimlerin oluşturduğu
parçacıklar.
Buna göre mekanikte kullanılan, kütle, enerji, zaman, hız, kuvvet ve sıcaklık gibi bir ölçme aracı ile ölçülebilen büyüklükler
fiziksel niceliklerdir. Bu tür büyüklükler genel olarak iki kısımda incelenir
Skaler Büyüklükler; Yalnızca sayılarla ifade edilebilen ve bir birimi olan büyüklüklere denir. Skaler büyüklükler, kütle,
sıcaklık, güç, zaman, iş vb. olarak incelenebilir. Örneğin; 3 metre, 5 kilogram, 35 oC, 600 Newton, 220 Volt gibi.
Vektörel Büyüklükler; Ölçülen büyüklüklerin bazılarındaki sayısal değer ve birim bazen bu veriyi anlamak için yeterli
değildir. Bu büyüklüğün yönü, şiddeti, başlangıç noktası ve doğrultusu da önem kazanır. Örneğin; "Araba Ankara'dan
İstanbul'a doğru saatte 90 km/sa hızla hareket ediyor" cümlesinde aracın yönü, doğrultusu ve hızı gibi kavramlar bilinmesi
gereken değerlerdir. Vektörel büyüklük; şiddeti, yönü, doğrultusu ve başlangıç noktası belirlenebilen büyüklüklerdir. Yani
yönlendirilmiş doğru parçalarına VEKTÖR denir. Vektörel büyüklükleri simgesi üzerine ok (→) işareti konularak skaler
büyüklüklerden ayırt edilmektedir.
9
BÖLÜM I
VEKTÖRLER
A
α
O
Uygulama noktası
Bir vektör A şeklinde gösterilir ve şiddeti her zaman pozitif bir büyüklüktür A .
3.1 Vektör Tipleri
(1). Bir noktaya baglı veya sınırlandırılmıs VEKTÖR
(2). Serbest VEKTÖR (Hareket edebilen vektör)
(3). Kayan VEKTÖR (Kuvvet dogrultusunda haraket edebilen vektör)
(4). Esit VEKTÖRLER (Şiddet ve yönleri aynı olan vektörler)
(5). Negatif VEKTÖRLER (Siddetleri aynı yönleri ters olan vektörler).
(6). Sıfır vektör (Başlangıç ve bitiş noktası aynı olan vektör daire, kare gibi)
1. TANSÖR: Özel bir noktada verilen fiziksel bir büyüklüğü tanımlayan özellikler grubuna denir.
Skaler sıfırıncı mertebeden bir tansördür. Gerilme tansörü gibi,
BİRİM ÇEVRİMLERİ
inch
foot=ayak
yard
mm
cm
dm
m
1 inch=parmak=pus
1
0.833
0.0278
25.40
2.54
0.254
0.0254
1foot=ayak=ft
12
1
0.333
304.80
30.48
3.048
3.3048
1 yard
36
3
1
914.14
91.44
9.144
0.9144
1 mm
0.03937
0.00328
-
1
0.1
0.01
0.001
1 cm
0.3937
0.0328
-
10
1
0.1
0.01
1 dm
3.937
0.328
0.1094
100
10
1
0.1
1m
39.37
3.281
1.094
1000
100
10
1
YÜK BİRİMLERİ
TEKİL YÜK
YAYILI YÜK
GERİLME
MOMENT
2
METRİK
0.1 t
9.1 t/m2
10 kg/cm2
10 t.cm
1 kN
1 kN/m2
1 N/m2
1 kN.m
2
2
1 MPa=1 N/mm =10 kg/cm 1 kN/m =10 kg/m
2
1 kPa = 1 kN/m
10
100 kg
100 kg/m2
100 kg.m
2
S.I
kN
kN/m
MPaN/mm2
kNm
BÖLÜM I
VEKTÖRLER
1.3. VEKTÖR İŞLEMLERİ [x,+,-]
Bir vektörün skaler ile ÇARPIMI,
Skaler =α
α
Vektör=
αA
A ise çarpım α A şeklinde elde edilir.
A
Bir vektörün skaler ile BÖLÜMÜ,
Çeşitli vektör örnekleri
A 1
= A
α α
şeklinde elde edilir.
−3 A
3A
−A
A
A
− A = [ −1]A
1.3.1. VEKTÖRİN TOPLAMI [+]
Bir kuvvet kendi doğrultusu boyunca kaydırılması halinde cisme olan etkisi değişmez. Bu duruma
kuvvetlerin kaydırılabilme özelliği denir. Vektör paralel kenar ilkesi kullanılarak;
R1 = A + B
A
R = R1 + C
A
R = A +B
A
C
B
şeklinde toplanır.
B
B
C
R = A +B
R = A +B + C
Üçgen kuralı ile vektörlerin toplamı.
A
A
R =B + A
A
B
B
B
R = A +B A
A
R = A +B
B
B
Vektörlerin doğrultularının aynı olması durumunda vektörler uç uca eklenerek toplamı (bileşkesi)
aşağıdaki şekilde bulunur.
R = A +B
A
R = A +B
B
A
R = A −B
B
B
B
B
A
B
Vektörlerde toplama
A
B
A
A
A
A
A
Vektörlerde toplama
B
R = A +B
Vektörlerde çıkarma
A
R = A +B
B
Vektörlerde çıkarma
B
1.3.2. VEKTÖRLERİN FARKI (ÇIKARILMA) [-]
Vektörlerin toplanmasındaki aynı ilkeler geçerli olup birbirinden çıkarılacak vektörlerin çıkarma işlemi
yapılır veya çıkarılacak olan vektörün yönü zıt olarak alınıp toplama işlemi yapılır. Yani iki vertörün
çıkarılması tablodaki gibi bir vektörün ile diğer vektörün zıt işaretlisinin toplamıdır.
11
BÖLÜM I
VEKTÖRLER
Verilen vektörlerin farkının bulunması
R = A −B
R = A −B
C
A
A
B
B
R = A −B −C
C
A
R = A +[ −B ]
C
R = A +[ − B ]+[ − C ]
A
B
A
−B
R = A [ −B ]
B
Örnek: şekilde verilen üçgeni oluşturan vektörleri toplayınız.
C
A
A
A
A
C
R = A +B
R = A +B
B
B
B
A
R = A +B + C = 0
Çözüm toplamanın birleşme özelliğini kullanarak önce 2 vektörün toplamı sonra 3. vektör toplanır.
Yapılan işlemlerden sonra bir kapalı şekil teşkil eden vektörlerin toplamı SIFIR vektör özelliğinden
dolayı sıfır olmaktadır.
Verilen bir vektörün birleşenlerine ayrılması aşağıdaki şekilde olur.
b
b
≡
R
ıı
R
Rb
≡
ıı
a
Kuvvetlerin Vektörel olarak toplanması
a
Ra
R = F1 + F2 + F3
F2
F1 + F2
F2
F2
F3
F1 + F2
F2
F2
F2
F3
Verilen üçgen üzerinde sinüs ve kosinüs teoremlerinin yazılması
Sinüs teoremi
A
B
C
=
=
sin α sin β sin γ
γ
A
A = B 2 + C 2 − 2BC cos α
B
β
Kosinüs teoremi
α
C
C = A 2 + B 2 − 2AB cos γ
12
BÖLÜM I
VEKTÖRLER
Şekilde verilen 4 kuvvetin birleşkesi aşağıdaki şekil üzerinde adım adım gösterilmiştir.
Şekilde verilen paralel 2 kuvvetin birleşkesi aşağıdaki şekil üzerinde adım adım gösterilmiştir.
F1
F1
F1
F2
m
FK
F2
Fc
6
Fc
F2
Fc
FR F2
FL
Fc
Fc
Fc
FK
FL
ÖRNEK 1.1. Şekilde vidaya uygulanan F1, F2 ve F3 kuvvetlerinin bileşke ve doğrultusunun bulunması.
y
y
R
o
20
F2=400 N
F1=200 N
140o
30o
α
20o
F3=180 N
Çözüm;
Cosinüs teoremi
F1=200 N
30o
β
x
F1 F2 için R1 = 200 2 + 4002 − 2x200x400cos140 = 567.94N
400 R ( 567.94 )
=
⇒ α = 28o
sinα
sin140
Sinüs teoremi
Buna göre bileşke kuvvetin [F1 ve F2] yatayla (x) yapmış olduğu açı β =30+28=58
o
y
Cosinüs teoremi (58+20=78o paralel kenar iç açı toplamı (360o-2x78)/2=102o)
R1 = F1 + F2
102o
R2 = R1 + F3
R2
78o
R1
R 2 = 180 + 567.94 − 2x180x567.94 cos102 = 630.45N
2
Sinüs teoremi
2
180 R2 (630.45)
=
⇒ α = 16o
sin α
sin102
Buna göre bileşke kuvvetin yatayla (x) yapmış olduğu açı β=58-16=42
13
58o
α
β
β
β
x
F3=180 N
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.2. Şekildeki halkaya uygulanan F1 ve F2 bulunmaktadır. Buna göre;
a. Bileşkenin 800 N ve tam düşey olması için F1=? , F2=?
b. F1 ve F2 yi öyle belirleyiniz ki F2 minimum olsun.
α=90-30=60o
F2
α
40o
F2
110o
30o
40o
F2
R=800 N
30
40o
F1
R=800 N
F1
F1
F1
40o
110o R=800 N
110
o
F2
F2
F1
30o
F2
y
Sinüs teoremi
F1
800
=
⇒ F1 = 547.23N
sin 40 sin110
F2
800
=
⇒ F2 = 425.67N
sin30 sin110
F2’nin minimum olması F2’nin F1’in doğrultusuna dik olmasıyla olur.
F1
F2
800
800
=
⇒ F1 = 692.82N
=
⇒ F2 = 400N
sin60 sin90
sin30 sin90min yapan
1.6. VEKTÖREL ÇARPIM [SİNÜS]
A x B vektörel çarpımı vektörlerin büyüklükleri çarpımının aralarındaki açının sinüsü ile çarpımına
[ A x B sin α ] eşittir. Bu çarpımın işareti sağ el kuralına göre belirlenir.
y
y
y
α
R = −B xA
R = AxB
x
x
B
A
B
z
A
z
z
A
B
VEKTÖREL ÇARPIM
y
y
ixi sin0 = jxj = kxk = 0
ixisin0=0
j
ixjsin90 = k
jxi = −k
jxk = i
kxj = −i
kxi = j
ixk = −j
R = A xB
[
90
i
x
i
k
] [
o
i
x
j
k
z
R = A B sin α
k
jxisin90=-k
j
-
z
A = A xi + A y j + A zk
A x B = A y Bz − A z By i + A z Bx − A x Bz
B = B x i + B y j + B zk
i
j k
j + A x B y − A y B x k = A x A y A z
B x B y B z
] [
14
]
+
i
x
BÖLÜM I
VEKTÖRLER
i
i
i
i
j k
j k
j k
j k
A x B = A x A y A z = [ j xk = i] i A x A y A z − [ i xk = − j ] j A x A y A z + [ i x j = k ]k A x A y A z
B x B y B z
B x B y B z
B x B y B z
B x B y B z
A y A z
= i
B y B z
ÖRNEK 1.16.
i
A x B = 2
4
A = 2i + 3 j − 4k
A x A z
− j
B x B z
A x A y
+k
B x B y
B = 4i + 2k verilen vektörlerin AxB değerinin bulunması.
j k
3 − 4 = jxk[3 x 2] + kxj[4x0] + ixk[2x2] + kxi[4 x4] + ixj[2x0] + jxi[3x4] =
0 2
= 6i − 0i − (4j + 16j) + 0k − 12k = 6i − 20j − 12k
EĞER, C.[ A x B] gibi bir skaler çarpımın vektörel çarpım ile çarpımı söz konusu ise;
A =Ax i +Ay j +Az k
B =B x i + B y j + Bz k C = C x i + C y j + Cz k
i j k
C.[ A xB = [ C x i + C y j + C z k ] A x A y A z = [ C x i + C y j + C z k ].[ A y B z − A z B y ]i + [ A z B x − A x B z ] j + [ A x B y − A y B x ]k
B x B y B z
C x C y C z
= C x [ A y B z − A z B y ]i + C y [ A z B x − A x B z ] j + C z [ A x B y − A y B x ]k
C.[ A xB ] = A x A y A z
B x B y B z
ÖZELLİK:
C . [ A x B = −B . [ A x C] mevcuttur.
ÖRNEK 1.17. A = 2i + 3 j − 4k
B = 4i + 2k
C = 4i + 2 j + 3k verilen vektörlerin
C.[AxB]= -B.[AxC] olduğunun gösterilmesi.
4 2 3
C.[ A xB ] = 2 3 − 4 = C x
4 0 2
=
A y A z
B y B z
− C y A x A z
B x B z
4.3 − 4
0 2
− 2.2 − 4
4 2
+ Ck A x A y
B x B y
+ 3.2 3 = 4.[ 6 ] − 2.[ 20 ] + 3.[ −12 ] = −52
4 0
−4 0 − 2
B.[ A xC ] = 2 3 − 4 =− 4. 3 − 4 − 0.2 − 4 − 2.2 3 = −4.[17 ] − 2.[ −8 ] = −52 C.[A.B]=-B.[A.C]sağladığı görülür.
2 3
4 3
4 2
4 2 3
15
BÖLÜM I
VEKTÖRLER
1.7. SKALER ÇARPIM [COSİNÜS]
A . B skaler çarpımı vektörlerin büyüklükleri çarpımının aralarındaki açının cosinüsü ile çarpımına
[ A . B cos α ] eşittir. Bu çarpımın işareti sağ el kuralına göre belirlenir.
y
i.icos0 = j. jcos0 = k .kcos0 =1
i. jcos90 = 0
j.icos90 = 0
y
j
j.k = 0 k . j = 0
90o
i
k .i = 0 i.k = 0
x
i
k
i
+
-
z
A.B = B.A
Değişme özelliği
Bir skaler ile çarpım
α[ A.B] = [ α A ].B = A.[ αB] = [ A.B]α
A.[B.C] = [A.B] + [A.C]
Dağılma özelliği
A = 2i + 3 j − 4k
j
k
z
ÖRNEK 1.18.
x
i
Skaler çarpımın bazı özellikleri:
k
j.icos90=0
i.icos0=1
j
B = 4i + 2k vektörlerin A.B değerinin bulunması.
A.B = i.i [2x 4] + j. j [3 x0] + k.k [ −4 x 2] = 8 + 0 − 8 = 0
1.4. DÜZLEM KUVVET ve KARTEZYEN VEKTÖR SİSTEMİ
y
F=Fx + Fy
y
j F = Fx i + Fy j
Fy’
F
Fy
y
F
Fyj
F=Fx’ + Fy’
F' = Fx' i + Fy' [ − j]
F' = Fx' i −Fy' [ − j]
Fy’j
y
’
−j
Fx’
x
F’
Fx
Fx’i
x
i
i
x
Fxi
x
F’
1.8. VERİLEN KUVVETLERİN BİLEŞKE VE DOĞRULTULARININ BULUNMASI
FRX = F1 cos α − F2 cos β+ F3 cos γ
y
y
FR
F
A: SKALER FRY = F1 sin α + F2 sin β− F3 sin γ
FRY
F
FR =
2
FRX
2
+ FRY
θ= tan −1
θ
α
β
x
x
FRY
FRX
FRX
γ
F
y
B: VEKTÖREL
F1 = F1x i + F1x j
::
::
::
F2 = F2x i + F2x j
F3 = F3 x i + F3 x j
F1
F1Y
Fn = Fnx i + Fnx j
F2
F2Y
F1X
F2X
x
F3X
16
F3Y
F3
BÖLÜM I
VEKTÖRLER
FR = F1 + F 2 + F 3
y
FR = [F1x i + F1x j ] + [F 2 x i + F 2 x j ] + [F 3 x i + F 3 x j ] + ::: [Fnx i + Fnx j ] =
FR = [F1x + F 2 x + F3 x + :: Fnx ] i[F1y + F 2 y + F3 y + :: Fny ] j
FR
FRY
θ
FR = FRx i + FRy j
::
::
::
x
FRX
θ = tan −1
2
2
FR = FRx
+ FRy
+ FRy
FRx
1.5. DÜZLEM KUVVET SİSTEMİ
Düzlem kuvvet sistemi, aynı düzlemde olan kuvvetlerin oluşturduğu kuvvet sistemidir. Verilen
kuvvetlerin dengede olması için;
∑F = ∑Fx + ∑Fy = 0 Denge için
y
y
∑Fx = 0 ve
∑Fy = 0
F
F
F
F
x
x
∑Fx i + ∑Fy
j= 0
Denge için
∑Fx i = 0
ve
∑Fy
j=0
F
F
F
şartları sağlanmalıdır.
ÖRNEK 1.10. Şekilde verilen kuvvet sisteminin dengede olması için F2=?
y
Serbest cisim diyagramı
y
F1=800 N
F1y=612.84 N
50o
x
F2xsin30
x
o
30
F1x=800cos50=514.23 N
F2ycos30
F2
∑ F = ∑ Fx + ∑ Fy = 0 olması için ∑ Fx = 0
ve ∑ Fy = 0 olmalı,
∑ Fx = F1x + F2x = 514.23 − F2x sin30 = 0 F2x = 1028.46N
∑ Fy = F1y + F2y = 612.84 − F2y cos 30 = 0 F2y
2
2
F = 1028.46 x + 707.65 y = 1248.40N
= 707.65N
17
F
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.12. 20 kg’lık bir bilgisayar şekildeki gibi asılabilmesi için AB kablo boyunun bulunması.
Yayın uzamamış boyu LBC " = 0.6m dir.
3
m
Serbest cisim
diyagramı
TAB
A
30
30
o
TBC
o
B
K=500 N/m
C
20x9.81=196.2 N
20 kg
∑F
Denge denklemleri
∑F
y
=0
x
=0
TBC − TBA cos 30 = 0
TBA sin 30 − 196.2 = 0
ise
TBA = 392.40 N TBC = 339.83 N
Yaydaki uzama
TBC = K BC . SBC
Yayın uzamış boyu
LBC = L BC" + sBC = 0.6 + 0.68 = 1.28 m
2 m = L AC cos 30 + 1.28
ise L AC = 1.99 m bulunur.
A-C=3 m olduğuna göre
339.83 = 500.SBC
SBC = 0.68 m
1.4.1. YER VEKTÖRÜ [r]
Uzayda bir noktanın yerini diğer noktaya göre belirleyen sabit bir vektördür. Örneğin uzaydaki bir P
noktasının koordinat eksen takımına göre yer vektörü aşağıdaki şekilde gösterilmektedir.
y
y
y
ryj
j
yj
90
P(x,y,z)
P(x,y,z)
r
o
x
i
k
r
xi
O
x
rxi
zk
z
z
x
rzk
z
Genel durum olarak uzayda bir yer vektörü iki nokta arasındaki yer vektörlerinin uç noktalarının
birleştirilmesi sonucu aşağıdaki şekilde elde edilir.
y
y
P(x,y,z)
r
Q(x,y,z)
P(x,y,z)
r
Q(x,y,z)
rP
rQ
[yP- yQ]j
x
[zP- zQ]k
O
x
[xP- xQ]i
z
O
z
r = r P − r Q = [xP i + yP j + zP k] − [x Q i + yQ j + zQ k ] = [xP − x Q ]i + [ yP − yQ ] j + [ zP − z Q ]k
18
BÖLÜM I
VEKTÖRLER
1.4.2. BİR DOĞRU BOYUNCA UZANAN KUVVET VEKTÖRÜ
Üç boyutlu sistemlerde bir kuvvetin doğrultusu genellikle kuvvetin doğrultusunun geçtiği iki nokta
tarafından belirlenir. Yani bir doğru için 2 nokta gerektiğinden.
r = r P − r Q = [xP i + yP j + zP k] − [ x Q i + yQ j + zQ k] = [xP − x Q ]i + [ yP − yQ ]j + [zP − zQ ]k
2
2
2
r = [[xP − x Q ]i + [yP − yQ ]j + [zP − zQ ]k ]
r
[x i + yB j + zB k] − [x A i + y A j + z A k]
F = Fu = F = [F] B
r
r
r
r
r
r
[xP − x Q ]i + [yP − yQ ]j + [zP − zQ ]k
= F x i + yj + zk
F = Fu = F = [F]
([[x − x ]i2 + [y − y ]j2 + [z − z ]k 2 ]1/2 )
r
r
r
r
P
Q
P
Q
P
Q
y
y
P(x,y,z)
r
r
Q(x,y,z)
F
rP
rQ
x
B
u
A
x
O
z
z
r
F = F u = F
r
r
[xP − xQ ]i
= Fcos α
F x i = Fu = F x i = [F]
2
2
2
r
[[xP − x Q ]i + [yP − yQ ]j + [zP − zQ ]k ]1/ 2
[x ekseni]
ryj
[yP − yQ ]j
F yj = Fu = F = [F]
= F cos β
2
2
2
[[xP − xQ ]i + [yP − yQ ]j + [zP − zQ ]k ]1/ 2
r
[y ekseni]
r
[zP − zQ ]k
Fzk = Fu = F zk = [F]
= Fcos γ
2
2
2
r
[[xP − xQ ]i + [yP − yQ ]j + [zP − zQ ]k ]1/ 2
[z ekseni]
19
BÖLÜM I
VEKTÖRLER
y
y
ry j
β=
ry j
r
α=
γ=
rz k
β=
ry j
rx i
r rx i
γ=
x
rzk
r
rz k
z
10
-z
Fzk = F
r
ry j
F(x,y,z)
r
r
r
α = xi
r
rzk
r
y
z
ry j
Fy j = F
F(x,y,z)
rx i
Fx i = F
rx i
rz k
x
r
r
r[6,3,-7]
-10
r
y
q[6,3,-7]
5
Orjin
O[0,0,0]
-5
q
x-y düzlemi
[z=0]
-x
y-z düzlemi
[x=0]
x
-10
-5
10
5
Orjin
x
5
x-z düzlemi
[y=0]
[6,-4,0]
-5
z
10
z
-10
-y
ÖRNEK 1.3. AB kirişinin boyunu ve doğrultusunu A’dan B’ye doğru bulunması.
y
y
B
4
2
B
y’
5j
5
β=58.7
o
O
x
3
2
z
O
x
3
z
2i
2
O
γ=146.1
o
3
-8k
α=77.9
x’
A
z’
A
A
r = r B − r A = [xB − x A ]i + [yB − yA ]j + [zB − z A ]k = [4 − 2 ]i + [2 − (−3)]j + [−5 − 3]k
r = (2i + 5j − 8k) m r = 22 + 5 2 + 82 = 9.64 m
α = cos−1[0.21] = 77.9o
β = cos−1[0.52] = 58.7o
u=
r
2
5
8
=
i+
j−
k = 0.21i + 0.52j − 0.83k
r 9.64 9.64
9.64
γ = cos −1[ −0.83] = 146.1o
20
o
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.4. Kuvvetlerin dengede olması için F kuvvetinin şiddeti ve doğrultusu nedir? [B(-2,-3,6)].
B(-2,-3,6)
z
z
F=??
F3=700 N
F3=700 N
F=??
y
F1=400 N
y
F1=400 N
F2=800 N
x
F2=800 N
x
{
}
F1 = 400j N
{
}
F2 = −800k N
F3 =
700
22 + 32 + 62
{−2i − 3j + 6k}
F3 = − 200i − 300 j + 600k N
∑F = 0
F = F x i + F y j + F zk
400j − 800k − 200i − 300j + 600k + Fxi + Fy j + Fzk = 0
∑F = 0
F1 + F2 + F3 + F = 0
F1 + F2 + F3 + F = 0
Birleşke
kuvvetin
değerleri
400j − 800k − 200i − 300j + 600k + Fxi + F y j + Fzk = 0
∑ Fx = 0
− 200 + Fx = 0
Fx = 200N
∑ Fy = 0
400 − 300 + Fy = 0
Fy = −100N
∑ Fz = 0
− 800 + 600 + Fz = 0
Fz = 200N
{
}
F = 200i − 100 j + 200k N
uF =
F = 200 2 − 100 2 + 200 2 = 300 N
z
F 200 100
200
i−
j+
k
=
F 300
300
300
200
o
x ekseni ile yapılan açı α = cos−1
= 48.2
300
γ=48.2
o
F
β=109
o
−100
o
y ekseni ile yapılan açı β = cos−1
= 109
300
α=48.2
200
o
z ekseni ile yapılan açı γ = cos −1
= 48.2
300
21
x
o
y
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.5. Şekilde gösterilen kabloyu bir adam 70 kN’luk bir kuvvetle çekmektedir. Bu kuvveti
z
KARTEZYEN vektör olarak tarif ederek doğrultusunun bulunuz.
A
A ve B noktalarının koordinatları(x,y,z) A(0,0,30) B(12,-8,6)
70 kN
r = (12 − 0)i + ( −8 − 0) j + (6 − 30)k = (12i − 8 j − 24k ) m
30
8
r = 12 + 8 + 24 = 28 m
2
2
2
m
6
m
y
r ve F vektörlerinin doğrultusunu
belirleyen u birim vektörü aşağıda yazılmaktadır.
B
[
F = F xi + F y j + F zk = F cos αi + cos β j + cos γk
12
]
m
z
x
γ=149
8
F = Fu = 70 12 i − j − 24 k = 30 i − 20 j − 60k kN
28 28 28
8
u = r = 12 i − j − 24 k
r 28 28 28
m
y
β=107
o
x
Kontrol F = 30 2 + 20 2 + 60 2 = 70kN
12
α = cos −1 = 64.6 o
28
α=64.6
8
β= cos −1 − =107o
28
B
24
γ = cos −1 =149o
28
ÖRNEK 1.6. Dairesel plak AB kablosu ile taşınmaktadır. Eğer A kablosunda oluşan kuvvet
F=500 N ise F kuvvetinin kartezyen vektör olarak ifade edilmesi.
z
z
A(0,0,2)
A
A
F=500N
2m
2m
F
1m
y
o
45
45
x
m
1
y
o
F
1m
x
B
1cos45
1sin45
o
o
B(1.707,0.707,0
)
Şekilde görüleceği üzere F kuvvetinin doğrultusu F yer vektörüyle aynıdır. Buna göre A ve B’nin
koordinatları şekil üzerinde bulunmuştur.
rAB = (1.707 − 0 )i + ( 0.707 − 0 ) j + ( 0 − 2 )k = (1.707 i + 0.707 j − 2k )m
r 1.707 0.707
2
u= =
i+
i−
k
r 2.72
2.72 2.72
KONTROL
r = 1.707 2 + 0.707 2 + 22 = 2.72m
1.707 0.707
2
FAB = Fu = 500
i+
i−
k = 314i +130 j − 368k N
2.72
2.72 2.72
FR = 314 2 + 130 2 + (−368 2 ) = 500 N
22
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.7. Şekilde gösterilen kuvvetlerin bileşkesinin şiddetini ve konumunu bulunuz.
z
F1=20 N
D
z’
C
γ=16.24
4m
5m
F3=100 N
B
8
β =73.76o
y
m
F2=200 N
α=89.906o
E
x
x’
12m
8m
F1 = F1
F2 = F2
F3 = F3
178.48
o
4m
A[4,8,-12]
rAC
rAC
( −5−4 ) ( −8−8 ) ( 4−( −12 ))
−9 i −16 j +16k
= −7.392 i −13.14 j +13.14k
= 20
9 2 +16 2 +16 2
rAB
rAB
( 0−4 ) ( 8−8 ) ( 0−( −12 ))
−4 i +0 j +12k
= 200
= −63.246 i +189.737k
4 2 +122
rAC
rAC
( 4−( −5 )) ( 8−0 ) ( 0−4 )
9 i +8 j −4k
= 70.93 i + 63.05 j − 31.52 k
=100
92 + 8 2 + 4 2
FR = F1 + F2 + F3
FR = [ −7.392 i − 13.14 j + 13.14k] + [ −63.246 i + 189.737k ] + [70.93 i + 63.05 j − 31.52k]
i , j ve k değerleri kendi içinde toplanır
j
i
k
FR = (−7.392 − 63.246 + 70.93) + (−13.14 + 63.05) + (13.14 + 189.737 − 31.52)
0.292
49.91
FR = 0.292 + 49.912 + 171.3572
FR = 0.292 i + 49.91 j + 171.357k
x ekseni
u=
y ekseni
171.357
2
z ekseni
FR
0.292 i
49.91j
171.357k
=
+
+
FR
178.48
178.48
178.48
0.0016
0.28
0.96
cos α=89.906o
cos β=73.76o
cos γ =16.24o
0.5
= 178.48 N
Fxi
cos89.906 = 0.292
Fy j
FR = FR .u = 178.48 cos73.76 = 49.91
Fzk
cos16.24 = 171.358
23
y’
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.8. Şekildeki kapak FAB=100 kN ve FAc=120 kN’luk kuvvetle A noktasına bağlanmıştır. Bu
kuvvetlerden oluşan bileşke kuvvetin A noktasındaki şiddetinin bulunması.
z
z
A(0,0,4)
A
FAC=120 kN
4m
4
FAB =100 kN
m
FAC=120 kN
FAB=100 kN
y
y
rAB
4m
rAC
2
C(4,2,0)
C
m
2
x
x
m
B
B
rAB = (4 − 0)i + (0 − 0) j + (0 − 4)k = (4i − 4k ) m
r = 4 2 + 4 2 = 5.66 m
[
]
4
4
FAB = F u = 100
i−
k = 70.7i − 70.70k N
5.66 5.66
r
4
4
i−
k
=
r 5.66 5.66
rAC = (4 − 0)i + (2 − 0) j + (0 − 4)k = ( 4i + 2 j − 4k ) m
u=
m
B(4,0,0)
B
u=
4
r = 4 2 + 2 2 + ( −4 2 ) = 6 m
[
]
2
4
4
FAC = F u = 120 i + j − k = 80i + 40 j − 80k N
6
6
6
r 4
2
4
= i+ j− k
r 6
6
6
FR = FAB + FAC = 80i + 40j − 80k + 70.7i − 70.70k = 150.7i + 40j − 150.7k
FR = 150.72 + 402 + (−150.72 ) = 217 kN
ÖRNEK 1.9. Şekildeki çerçeveye x yönünde F=500 N’luk bir kuvvet etkimektedir. Bu kuvvetin AB
doğrultusuna dik ve paralel birleşenlerinin belirlenmesi.
y
B
y
F=500i N
B
F=500i N
FAB
4m
A
x
2
z
4m
r AB
=
rAB
Skaler çarpım [i.i cos0=1]
x
Fdik
2
z
u AB =
u
m
6m
A[0,0,0] B[6, 4,2]
A
6i + 4j + 2k
62 + 42 + 22
m
6m
= 0.802i + 0.535j + 0.267k
FAB = F uAB = 500i[0.802i + 0.535j + 0.267k] = 401ii + 0 + 0 = 401N
F AB = FAB uAB = 401[0.802i + 0.535j + 0.267k] = [321.60i + 214.54j + 107.07k]N
24
BÖLÜM I
VEKTÖRLER
Fdik = F −FAB = 500i − [321.60i + 214.54j + 107.07k] = [178.4i − 214.54j − 107.07k]]N
Fdik = 178.42 + 214.542 + 107.072 = 298.86N
2
Fdik = F2 − FAB
= 5002 − 4012 = 298.66N
veya
ÖRNEK 1.11. Şekilde verilen sistemde
a. Kablo kuvvetlerinin
b. Yaydaki uzamanın hesabı [yay katsayısı k=500 N/m].
z
C
4
m
2
5
3
m
z
D
m
FAD
FAC
m
y
A
2
m
4
FAB
y
A
m
Sistemin serbest
cisim diyagramı
W=20 N
x
B
x
W=20 N
A[0,0,0] C[2,−4,5]
D[−2,4,3]
FB = FB i
r AC
= F 2i − 4j + 5k = F [0.27i − 0.55j + 0.67k]
F AC = FAC uAC = FAC
AC
AC
2
2
2
rAC
2 +4 +5
− 2i + 4 j + 3k
r AD
F AD = FAD u AD = FAD
= FAD
2 2 + 4 2 + 3 2
rAD
∑F = 0
∑ F = ∑ F x + ∑ F y + ∑ Fz = 0
∑ Fx = 0 [FAB + 0.27FAC − 0.32FAD ]i = 0
∑ Fy = 0 [−0.55FAC + 0.74FAD ] j = 0
∑ Fz = 0 [0.67FAC + 0.56FAD − 20]k = 0
= FAD [ −0.32i + 0.74 j + 0.56k ]
∑ Fx = 0
1
∑ Fy = 0
∑ Fz = 0
FAB = 41.60N
⇒
2
FAC = 81.23N
FAD = −61.47N
3
FAD nin eksi [-] çıkması kuvvetin ters yönde olduğunu gösterir.
Yaydaki uzama
FAB = k yaysabiti . xuzama
41.60 = 500. xuzama
25
xuzama = 0.0832m
BÖLÜM I
VEKTÖRLER
SORU 2: F=100 kN kuvvetinin s doğrultusundaki Fs bileşeninin bulunması
z
4m
m
5
A
y
m
6
8m
F=100 N
rCD = (−5j + 6k)m
2
C
2
r = 5 + 6 = 7.81m
s
B
O
F = FuCD
5
6
= 100 −
i+
k
7.81 7.81
O(0,0,0) C(0,5,0)
Yer vektörü
10m
= − 64.02j + 76.82k N
rOC = (5j)m
F = FuOC
j
k
i
= 0
5
0 = 384.1i
0 −64.02 76.82
x
s yönündeki Fs birleşenleri
rOB = (8i + 10j)m r = 82 + 102 = 12.81m
10
8
Fs = [FuOC ]uOBs = [384.1i] •
i+
j = 239.88i N
12.81
12.81
239.88
=1
cos−1 α = 0
239.88
ÖRNEK 1.13. F=400 N başlangıç noktasına uygulanmaktadır.
x ekseni açısı α =
a. Fx Fy ve Fz bileşenleri
b. F kuvvetinin x-y ve y-z düzlemlerindeki iz düşümlerini
c. F kuvvetinin s doğrultusundaki Fs bileşeninin bulunması
z
F=400 N
m
4
m
5
A
y
m
6
m
8
O
a. A ve O noktalarının koordinatları(x,y,z) O(0,0,0)
Yer vektörü rOA = ( 4i + 5 j + 6k ) m
m
10
A(4,5,6)
x
r = 4 2 + 5 2 + 6 2 = 8.77 m
r ve F vektörlerinin doğrultusunu belirleyen u birim vektörü aşağıda yazılmaktadır.
r
4
5
6
F = Fxi + F y j + Fzk = F cosαi + cosβj + cos γk u OA = OA =
i+
j+
k
rOA
8.77
8.77
8.77
4
5
6
F = FuOA = 400
i+
j+
k = 182.44i + 228.05j + 273.66k N
8.77
8.77
8.77
26
s
B
m
3
BÖLÜM I
VEKTÖRLER
b. F kuvvetinin x-y ve y-z düzlemlerindeki iz düşümlerini
Fxy = Fcos−1 β 52 + 42 / 8.77 = 400 x 0.73 = 292N
Fyz = 273.662 + 228.052 = 356.23N
Fyz = Fcos α 356.23 = 400cos α ⇒
veya Fxy = 182.442 + 228.052 = 292N
−1 356.23
= 27o
α = cos
400
z
Fyz
F=400 N
4m
5m
A
y
m
6
α
d. s yönündeki Fs birleşenleri
8m
Fy
Fz
β
rOB = (8i + 10 j + 3k ) m r = 8 2 + 10 2 + 3 2 = 13.15 m
s
B
3m
Fxy
O
10m
Fx
uOBs =
rOBs
8
10
3
=
i+
j+
k
rOBs 13.15
13.15
13.15
x
4
5
6 8
10
3
Fs = [FuOA ]uOBs = 400
i+
j+
k .
i+
j+
k
8.77
8.77
8.77 13.15
13.15
13.15
Fs = 110.99i + 173.42j + 62.43k N
VEYA
u OBs =
F = 182.44i + 228.05j + 273.66k N
[yukarıda bulunmuştu]
r OBS
8
10
3
i+
j+
k [doğrultu]
=
rOBs
13.15
13.15
13.15
8
10
3
Fs = F uOBS = 182.44i + 228.05j + 273.66k .
i+
j+
k
13.15 13.15
13.15
z
4m
5m
A
y
m
6
O
x açısı α = 110.99 = 0.516
215.15
173.42
= 215.15 Ny açısı β =
= 0.806
215.15
z açısı γ = 62.43 = 0.290
215.15
27
173.42j
s
B
8m
1/2
Fs = 110.992 + 173.422 + 62.432
62.43k
F=400 N
Fs = F uOBS = 110.99i + 173.42j + 62.43k N
3m
110.99i
10m
x
cos−1 α = 58.94o
cos−1 β = 36.29o
cos−1 γ = 73.13o
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.14. Şekildeki r=-8i-10j+20k vektörünün AB doğrultusundaki
izdüşümünün bulunması.
B
z
[herhangi
bir
vektör
üzerindeki]
rAB
B
r=-8i-10j+20k
r=-8i-10j+20k
8m
z
8m
8m
A
8m
4m
16m
3m
A
y
4m
4m
16m
m
3
y
7m
4m
8m
x
7
8m
a. A ve B noktaları(x,y,z) A(4,-8,4)
x
B(-16,8,8)
r AB = (−20i + 16j + 4k)m
Yer vektörü
m
r = 202 + 162 + 42 = 25.92 m
F = Fxi + Fy j + Fzk = F cosαi + cosβj + cos γk
uAB =
r AB
20
16
4
=−
i+
j+
k = −0.772i + 0.617j + 0.154k
rAB
25.92
25.92
25.92
rAB = uAB .r = [−0.772i + 0.617j + 0.154k]. [−8i − 10j + 20k ]
(çarpma işlemi skaler olarak yapılmıştır.)
= [(−0.772) . (−8) + (0.617) . (−10) + (0.154) . (20) ] = 3.086
Vektörel olarak aşağıdaki şekilde ifade edilebilir.
3.086
r AB = r AB .uAB =
2
8 + 102 + 202
[−0.772i + 0.617j + 0.154k] = [−0.100i + 0.080j + 0.020k]
o
ÖRNEK 1.15. Şekildeki çatı giriş kapağı AB kablosu ile 30 lik açık bulunmaktadır. Kablodaki çekme
kuvveti F=100 N olduğuna göre, bu kuvvetin kapağın CD diyagonal ekseni doğrultusundaki bileşeninin
şiddetinin bulunması.
z
B
900 mm
F=100 N
y
z
D
A
x
o
C
ηCD
A
C
y
30
x
Sin30 =
o
30
x
28
z
900
z
x1
⇒ z = 450 mm
BÖLÜM I
VEKTÖRLER
Cos30 =
x
900
⇒ x = 779 .4 mm
A, B ve D koordinatları
x 1 = 900 - 779.4 = 120.6 mm
A( 779.4, 0, 450)
(C noktasına göre)
B(0,1200,900)
D(779.4, 1200, 450)
r AB = (0 − 779 .4)i + (1200 − 0) j + (900 − 450 )k = ( −779 .4i + 1200 j + 450k ) mm
r = 779.4 2 + 1200 2 + 450 2 = 1500 mm
u=
450
779.4 1200
F = Fu = 100 −
i+
j+
k = − 51.96i + 80j + 30k N
1500 1500 1500
r
779.4 1200
450
=−
i+
j+
k
r
1500 1500 1500
Kontrol
AB kablosundaki çekme kuvveti F = 100
ηCD =
−779.4i + 1200j + 450k
1500
F = 51.962 + 802 + 302 = 100N
−779.4i + 1200j + 450k
779.4 + 1200 + 450
2
2
2
= 100
−779.4i + 1200j + 450k
15 00
−779.4i + 1200j + 450k
−779.4i + 1200j + 450k
FCD = F. ηCD =
.
= 46N
15
1500
skaler
{çarpım
ÖRNEK 1.19. Şekildeki üç küresel mafsallı (A,B,C) ayağa etkiyen kuvvetlerin
bulunması (her bir kare 1x1 m ve elemanlar basınç ve çekme kuvveti taşımaya elverişlidir).
z
D
F=1 kN
y
5
m
C
F kuvvetinin izi
1
E
0
A
B
A, B ve D koordinatları A(-1,-1, 0)
x
B(2,-1,0) C(0,2,0)
D(0,0,5)
rDA = (−1 − 0)i + (−1 − 0) j + (0 − 5)k = (−1i − 1j − 5k ) m
rDA = 12 + 12 + 5 2 = 5.2 m
r
1
1
5
uDA = DA = −
i−
j−
k
rDA
5.2 5.2
5.2
1
5
1
A = A uDA = A −
i−
j−
k
5.2
5.2 5.2
rBD = (0 − 2)i + (0 − (−1)) j + (5 − 0)k = (−2i + 1j + 5k ) m
uBD =
rBD = 2 2 + 12 + 5 2 = 5.48 m
2
1
5
B = B uBD = B−
i+
j+
k
5.48
5.48
5.48
rBD
2
1
5
=−
i+
j+
k
rBD
5.48
5.48
5.48
29
BÖLÜM I
VEKTÖRLER
rCD = 0 2 + 2 2 + 5 2 = 5.39 m
rCD = (0 − 0)i + (0 − 2) j + (5 − 0)k = (−2 j + 5k ) m
u CD =
2
5
C = C u CD = C−
j+
k
5.39
5.39
rCD
2
5
=−
j+
k
rCD
5.39
5.39
r0E = 22 + 22 = 2.83m
r0E = (2 − 0)i + (2 − 0)j = (2i + 2j)m
u 0E =
2
2
F = F u 0E = F
i+
2
.
83
2
.
83
r0E
2
2
i+
j
=
r0E
2.83
2.83
∑F = 0
Denge şartından
[
[
]
j = 1 0.707i + 0.707 j
F+ A+B+C = 0
]
1
5
2
1
5
2
5
1
1 0.707i + 0.707 j + A −
i−
j−
k + B−
i+
j+
k + C −
j+
k = 0
5.2
5.2
5.48
5.48
5.39
5.2
5.48
5.39
x EKSENİ
1
2
i + B −
i = 0
∑ Fxi = 0 ⇒ 10.707i + A −
5.2
5.48
0.707 − 0.192A − 0.365B = 0
y EKSENİ
∑ Fy j = 0 ⇒
−1
1
−2
10.707j + A
j + B
j + C
j = 0
5.2
5.48
5.39
0.707 − 0.192A + 0.183B − 0.371C = 0
z EKSENİ
−5
5
5
A
j + B
j + C
j = 0
5.2
5.48
5.39
Determinant kullanılarak A, B ve C değerleri hesaplanır.
∑ Fzk = 0 ⇒
− 0.962A + 0.912B + 0.928C = 0
SABİT
−0.707 − 0.365
0
det −0.707
0.183 − 0.371
0
0.912
0.928
0 A −0.707
−0.192 − 0.365
−0.5988
−0.192
0.183 − 0.371 B = −0.707 ⇒ A =
=
= 2.044 kN
0 −0.2929
−0.192 − 0.365
0.912
0.928 C 0
−0.962
det −0.192
0.183 − 0.371
0.912
0.928
−0.962
Benzer şekilde
B = 0.861kN
C = 1.273kN
Ters matris işlemi kullanılarak da A, B ve C değerleri hesaplanabilir. A X = b
0 A −0.707
−0.192 − 0.365
−
0
.
192
0
.
183
−
0
.
371
B = − 0.707 ⇒
− 0.962 0.912 0.928 C
0
ise
X = A −1 b
A −1.735 − 1.156 − 0.462 −0.707 A = 2.044
B = − 1.827 0.608 0.243 − 0.707 = B = 0.862 kN
C − 0.003 − 1.797 0.359
0 C = 1.273
Tersi
30
sabitler
BÖLÜM I
VEKTÖRLER
BÖLÜM 2: MOMENT
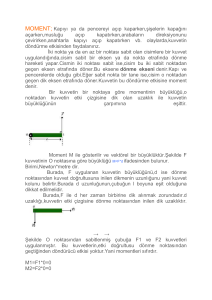
2.1. MOMENT [BİR KUVVETİN DİK BİR EKSENE GÖRE]
Moment; bir kuvvetin bir noktaya dik mesafesi ile çarpımından oluşan kuvvet çiftine denir. Düzlem
kuvvetlerin momenti aşağıda kısaca örnek üzerinde açıklanmıştır.
P=4 kN
L1=3
m
L2= 5
y
m
P=100N
o
60
A
B
x
L= 6m
B
P=100N
M A = P x L = 4 x 5 = 20 kNm
A
Py=100sin60=86.6 N
o
60
Px=100cos60=50 N
MB = 4 x 3 = 12 kNm
A
L= 6m
B
MA = P xL = 86.6 x 6 + 50 x0 = 519.6Nm
Üç boyutlu sistemlerde moment şekil üzerinde açıklanmaktadır.
F
Fy
rx
y
My
F
y
Fyj
Fx
ry
r
Fzk
yj
Mxi
Mz=rx Fy- ry Fx
xi
Myj
x
zk
x
x’e paralel y’ye dik olanlar Mz oluşturur
F=Fxi +Fyj +Fzk
z
Fxi
Mo
r = xi+ yj+ zk
x
Mzk
z
y’ye paralel x’e dik olanlar Mz oluşturur
Mo =rDİK KUVVET KOLU xFKUVVET
Mo =Mxi +Myj +Mzk
Momentin İşaret: Vektörel çarpım işaret kuralından çıkar. Veya M=rxF olmasından dolayı F kuvveti
indis (x,y,z) eksenine bitiştirilir ve saat dönüşü + tersi – alınarak vektörel çarpım işaret kuralı ile aynı
olduğu görülür.
MOMENT,
1. Verilen kuvvet-kuvvetlerin eksenlerindeki birleşenleri
2. Kuvvet-kuvvetlerin uygulandığı nokta ile moment alınacak nokta arasındaki noktaların yer
vektörleri
31
BÖLÜM I
VEKTÖRLER
i
3. 1. ve 2. deki değerler kullanılarak M = x
F
x
j
y
Fy
k
z ile MOMENT-MOMENTLER hesaplanır.
Fz
4. Moment hesabı için gerekli olan matris tablodaki gibi oluşturulu..
M
i
x
Fx
=
j
y
Fy
k
z
Fz
→Eksenlerin doğrultman kosinüsleri
→F kuvvetinin uygulama noktası koordinatları
→F kuvvetinin bileşenleri
i
j k
M = x y z = Fz y − Fy z i − [ Fz x − Fx z ] j + Fy x − Fx y k
F F F
x y z
Mx = Fz y − Fy z
My = − [ Fz x − Fx z ]
y
Myj
M y = −[ Fz x − Fx z ]
[
Mxi M x = Fz y − Fy z
Mz = Fy x − Fx y
z
]
x
Mzk
[
M z = Fy x − Fx y
]
Mx, My ve Mz değerleri skaler olup F kuvvetinin O merkezinden geçen eksenlere göre momentleridir.
Bu momentler; F kuvvetinin rijit cisme eksenleri etrafında uyguladığı döndürme uygulamalarıdır.
A-
i
Moment hesabı için M = x
F
x
j
y
Fy
k
z matrisi incelendiğinde;
Fz
y
5m
0
x
3m
-B
F=40 N
8m
z
j k
j k
j k
i
i
i
Mo = 3 0 0 =0 MA = 3 5 0 =5x40 = 200Nm MB = 3 0 8 =−8x40 =−320Nm
40 0 0
40 0 0
40 0 0
y
F=30 N
2m
m
0
3
m
2
Mx =[2x50−2x30]i=40i
j
k
i
Mo = 3
2 2 Nm=My =−[3x50−2x40]j=−70 j
40 30 50
Mz =[3x30−2x40]k =10k
8m z B
x
F=40 N
F=50 N
B noktasında oluşan momentleri herbir kuvvet için ayrı ayrı hesaplanmıştır.
j k
j k
i
i
MB = 3 0 8 =My =−[ −8x40]j=320 j+ 0 2 8 =Mx =−[8x30]i=−240i+
40 0 0
0 30 0
x eksenindeki 40 kN dan oluşanM
y eksenindeki 30 kN danM
Mx =−240i
k
i j
0 0 6 =0 =M =320 j
8
−
2
y
0 0 50
Mz =0
x eksenindeki 50 kN denM
Özellik 1: M momentinin Mx skaler birleşeni M ile x ekseni üzerindeki birim vektör i’nin skaler (cos)
çarpımından;
M.i=[Mx i+My j+Mz k].i=[Mx i.i +My j.i+Mz k.i]=Mx [1]+0+0=Mx
32
BÖLÜM I
VEKTÖRLER
olarak elde edilir. Buna göre M momentinin herhangi bir n eksenine göre Mn momenti n ekseni
üzerindeki un birim vektörü ile [Mn =M un] çarpımıdır.
Yukarıda klasik olarak momentler vektörel olarak aşağıdaki şekilde aynısının bulunduğu görülür.
P=4 kN
L1=3
m
y
L2= 5
m
P=100N
60o
A
B
x
L= 6m
B
P=100N
M A = P x L = 4 x 5 = 20 kNm
C
Py=100sin60=86.6 N
o
60
Px=100cos60=50 N
MB = 4 x 3 = 12 kNm
C
L= 6m
B
MC = P x L = 86.6 x 6 + 50 x 0 = 519.6Nm
M = r xF
MA
MB
MC
i
= x
F
x
i
= x
F
x
i
= x
F
x
r = xi + yj + zk
j
y
Fy
j
y
Fy
j
y
Fy
k i
j
z = − 5 0
Fz 0 − 4
k i
j
z = 3 0
Fz 0 − 4
F = Fxi + Fyj + Fzk
M = M xi + M yj + M zk
k
0 = [0]i + [0] j + [[ −4 ] x [ −5 ] − 0]k = 20 kNm
0
k
0 = [0]i + [0] j + [− 4 x3 − 0]k = −12 kNm
0
k i
j
k
z = −6
0
0 = [0]i + [0] j + [[ −86.6 ] x [ −6 ] − 0]k = 519 .6 Nm
Fz 50 − 86.6 0
ÖRNEK 2.1. Şekilde verilen sistemde,
y
y
P
a. Mo=?
b. Mx=?
c. MoA=?
8
A
m
8
A
m
j
x
F=100 N
momentlerinin hesaplanması.
z
10
6
k
m
m
z
y
0
x
i
F=100 N
10
6
m
m
a. Mo: momentinin hesabı
k
F=
100
10 2 + 8 2 + 6 2
[ −10 i − 8 j + 6 k ] = [ −70.72 i − 56.58 j + 42.43 k ]
Yer vektörü r = 10 i + 8 j
i
MO = x
Fx
8
A
m
j
j
y
Fy
0
z
10
m
k
i
j
k
z =
10
8
0 = 339.44i − 424.30 j − 0.04k Nm
Fz −70.72 − 56.58 42.43
b. Mx: x eksenine paralel Mx momentinin şiddeti, Mo’ın x doğrultusundaki birleşenidir.
M x = Mo i = [339.44 i − 424.30 j − 0.04 k ] i = 339.44 Nm
33
x
i
F=100 N
6
m
BÖLÜM I
VEKTÖRLER
10 i + 8 j + 6 k
10 2 + 8 2 + 6 2
c. MOA’nın hesaplanması: M oA = M o η oA = [339.44 i − 424.30 j − 0.04 k ]
10 i + 8 j + 6 k
M oA = [339.44 i − 424.30 j − 0.04 k ]
14.142
VEYA
M oA = −0.016 ≅ 0 Nm
MOA’yı A noktasından O noktasına giderek hesaplamak için,
y
1. Yukarıda yapıldığı gibi önce F kuvveti analiz edilir. F = [ −70.72 i − 56.58 j + 42.43 k ]
P
2. P noktasından A noktasına olan yer vektörü yazılarak moment değeri bulunur.
8
A
m
j
i
j
k
MPA =
0
0
6 = 339.48i − 424.32 j − 0k Nm
−70.72 − 56.58 42.43
k
z
0
x
i
F=100 N
10
6
m
m
3. MOA momentinin AO doğrultusundaki değeri rAO yer vektörü ile çarpılarak bulunur.
10 i + 8 j + 6 k
M oA = M o η oA = [339.48 i − 424.32 j − 0 k ]
=0
2
2
2
10 + 8 + 6
Uygulama: TAB=200 kN ve TAC=500 kN ise MO=?
3.6m y
A
9.2m
B
x
6m
zD
9m
C
Çözüm: Kablo kuvvetlerinin eksen birleşenleri bulunur.
rAC = −9 i + 6j − 9.2k
F = FAC .
rAC
−9 i + 6j − 9.2k
= 500
= −316.90 i + 211.27 j − 323.94k
rAC
92 + 62 + 9.22
rAB = −9 i + 6j + 3.6k
F = FAB .
rAB
−9 i + 6j + 3.6k
= 200
= −157.89 i + 105.26 j + 63.16k
rAB
92 + 62 + 3.62
i
j
k
i
j
k
MC =
9
0
12.8 +
9
0
0 = −2704.26 i − 1709.3 j + 2848.77k
−316.90 211.27 −323.94 −157.89 105.26 63.16
[−(12.8⋅211.27)]i=−2704.26i
−[9⋅(−323.94)+12.8⋅316.9]k =−1140.86 j
[9⋅211.27)]k =1901.43k
0i
−[9⋅63.16] j=−568.44 j
[9⋅105.26]k =947.34k
34
BÖLÜM I
VEKTÖRLER
Örnek 2.2. F kuvvetinin DC doğrultusunda oluşturduğu momenti MDC=100 Nm ise F=?
a. AC yönünde giderek
b. AD yönünde giderek
Temel şekil
0.4
B
m
0.4
F
D
0.2
F
D
0.2
z
m
D
z
Çözüm: Noktaların koordinatları A[0.2,0,0.2] B[0.4,0.4,0] C[0,0,0]
F = F.
0.2
m
A
Önce C’ye sonra D’ye
rCA = 0.2 i + 0.2k
0.2
m
z
Önce D’ye sonra C’ye
D[0,0.4,0.2]
rAB
F
0.2 i + 0.4 j − 0.2k
=F
=
0.2 i + 0.4 j − 0.2k
2
2
2
rAB
0.49
0.2 + 0.4 + 0.2
i
j
k
F
F
MC = 0.2 0
0.2
=
(0.2)(0.4)k − (0.2)(0.4) i − (0.2)(−0.2) j + (0.2)(0.2) j
0.49
0.49
0.2 0.4 − 0.2
F
(−0.08) i + (0.08) j + (0.08)k
0.49
r
1
−0.4 j − 0.2k
= DC =
=
[ −0.4 j − 0.2k]
2
2
rDC
0.447
0.2 + 0.4
MC =
uDC
−100 =
MDC = MC .uDC
F
1
( −0.08 ) i + ( 0.08 ) j + ( 0.08 )k
[ −0.4 j − 0.2k ]
0.447
0.49
1 [( 0.08 )( −0.4 ) + ( 0.08 )( −0.2 )]
−100 = F
0.49 0.447
F = 456N
VEYA AD noktasına göre moment alınarak
rAB
0.2 i + 0.4 j − 0.2k
MD = rDB xF rDB = 0.4 i −0.2k
F = F.
=F
= F [ 0.2 i + 0.4 j − 0.2k ]
rAB
0.22 + 0.4 2 + 0.22 0.49
j
k
i
MD = 0.4 0 −0.2 F = F ( −0.2 )( 0.2 ) j + ( 0.4 )( 0.4 )k − ( 0.4 )( −0.2 ) j − ( 0.4 )( −0.2 ) i
0.49 0.49
0.2 0.4 −0.2
MD = F ( 0.08 ) i + ( 0.04 ) j + ( 0.16 )k
0.49
uDC =
y
m
C
m
A
A
MC = rCA x F
0.2
C
C
m
B
m
x
y
y 0.2m
m
0.2
B
m
x
F
x
0.2
0.4
rDC −0.4 j − 0.2k
=
= 1 [ −0.4 j − 0.2k ]
2
2
rDC
0.2 + 0.4 0.447
−100 = F ( 0.08 ) i + ( 0.04 ) j + ( 0.16 )k 1 [ −0.4 j − 0.2k ]
0.447
0.49
C noktasına alınan momentle aynı olduğu görülmektedir.
MDC = MD .uDC
35
F = 456 N
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.3. Şekilde verilen iki kuvvetin Oa eksenine göre birleşke momentini [MOa=?] bulunuz.
Sonucu kartezyen vektör olarak yazınız.[2006 1.ara]
u 0 a = cos 30 i − cos 60 j = 0.866 i − 0.5 j
OC = 5 cos 60 = 2.5
m
OD = 4 cos 30 = 3.464
m
z
z
45
OE = 4 cos 60 = 2
C[0, −2.5,0]
rOC = −2.5 j
5
4
H
x
j
3.464
40
i
+ 0
56.56 0
k
6
j
− 2.5
0
m
30
m
o
o
a
o
D
m
30
i
M O = [rO B x F1 ] + [rO C x F2 ] = 2
− 40
6
0
C
o
y
120
rOB = 2 i + 3.464 j + 6k F =50 N
2
F1 = 80[cos120 i + cos60 j + cos 45 k ] = [ −40 i + 40 j + 56.56k ] = 50k
F1=80 N
60
B
m
x
B [2,3.464,6]
o
G
E
k
0
50
M O = (3.464 )(56.56 ) i + ( − 40 )(6 ) j + (2)(40 )k − ( − 40 )(3.464 )k − (2)(56.56 ) j − (6 )(40 ) i + (2.5 )(50 ) i
M O = − 169 i − 353 j + 218. 5 6k
MOa = MO .uoa = [ −169 i − 353 j + 218.56k].[0.866 i − 0.50 j] = 30.15Nm
MOa = MOa .uoa = 30.15[0.866 i − 0.50 j] = 26.10 i − 15.10 j
ÖRNEK 2.4. Verilen kuvvetin “O” noktasındaki momentinin hesabı
MOa = 26.102 + 15.102 = 30.15Nm
[2006 1.ara]
F = [−30 i + 60 j + 80k]
z
F = [−30 i + 60 j + 80k]
z
A
12
m
12
0
3
4
rOA = 3 i − 4 j + 12k
j
i
MO = rOA xF = 3 − 4
−30 60
m
rOA
y
0
m
3
m
4
x
y
m
m
x
k
12 = [ −4x80 − 12x60] i + [3x80 + 12 x 30] j + [3 x 60 − 4 x 30]k = −1040 i − 600 j + 60k Nm
80
1040
−1
x ekseni açısı α = −
= −0.865 cos α = 30 MO = 10402 + 6002 + 602 = 1202.16Nm
1202.2
600
y ekseni açısı β = −
= −0.499 cos−1 β = 60
1202.2
MO = 1202.16[0.865 i − 0.499 j + 0.05k]
60
= 0.05
x ekseni açısı γ =
cos−1 γ = 87.14
1202.2
M = [10402 + 6002 + 602 ]1/2 = 1202.2 Nm
36
y
BÖLÜM I
VEKTÖRLER
2.2. VARİGNON TEOREMİ [Varignon, 1654-1722]
Düzlem çokgenin kenarlarının ortası birleştirildiğinde bir paralelkenar oluşur ve: Alan(EFGH)=Alan(ABCD)/2
Alan(EFGH): Paralelkenar
Pierre Varignon, 1654-1722, Fransız Matematik, Mekanik
Varignon paralelkenarı, Varignon teoremi: Kuvvetlerin bir noktaya göre momentlerinin toplamı bileşke
kuvvetin momentine eşittir. (Not: Simon Stevin Varignon’dan 100 yıl önce aynı teoremi sunmuş,
Varignon farkına varmamıştı).
Bileşke bir kuvvetin [R] bir noktaya [a] göre momenti, aynı bileşke kuvvetin her üç eksendeki [Rx, Ry,
Rz] izdüşümlerinin aynı noktaya [a] göre momentlerinin toplamına eşit olmasına varignon teoremi
denir. Yani bir noktada birden çok kuvvetin kesişmesi durumunda bu kuvvetlerin her birinin bir başka
noktada oluşturduğu moment, bu kuvvetlerin bileşkesinin aynı noktada oluşturduğu momente eşittir.
y
y
≡
ıı
R
x
≡
R
Ry
y
a
=
β
Ry
R
R
x
≡
α
γ Rx
ıı
rb
a
Ma =R . r
ra
a
Ma =Ry . ra +Rx . rb
R sinα
α =A sinβ
β + B sinγγ
Ma =R . r =Ry . ra + Rx . rb
y
y
y
Mo
F
r
Mo
F
n
F
α
r
37
x
ıı
≡
y
r
ıı
Rx
r
x
BÖLÜM I
VEKTÖRLER
Bir F kuvveti ve bu kuvvetin doğrultusunda olmayan bir O noktası bulunmaktadır. O noktasından
geçen ve F kuvvet doğrultusuna dik olan eksendeki momenti M=F.d dir. M’nin doğrultu ve
büyüklüğünü bulmak için F kuvvet doğrultusundaki herhangi bir noktanın o noktasına göre yer vektörü
olan r ve F’nin vektörel çarpımı yapılır. Momentin yönü ise sağ el kuralı ile bulunur.
M = r xF
M = F.d
[r sin α ] F = F . d
Moment için vektörel çarpım determinant şeklinde aşağıdaki şekilde yazılır.
j k
i
M = r x r y r z
F x F y F z
F kuvvetinin O merkezinden geçen herhangi bir n eksenine göre momenti My yazılabilir. Eğer n, y
doğrultusunun birim vektörü ise bu doğrultudaki moment birleşeni M.n dir ve My nin skaler
büyüklüğünü verir. Buna göre;
My = [r x F . n ] n
olur.
M1
F2
M2
O
M1 + M2 = r x F1 + r x F2
M1
F2
F1
F1
r
O
M = r x [ F1 + F2 ]
R
r
M = r x[R ]
Bu bağıntı üç boyutlu bir sistemde Varignon teoreminin yazılışıdır. Yani “bir noktada kesişen
kuvvetlerin O noktasına göre momentleri bu kuvvetlerin toplamının O noktasına göre momentine
eşittir”.
38
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.7. Şekilde gösterilen kuvvetlerin bileşkesinin şiddetini (R) ve konumunu (x,y,z) bulunuz.
F1=20 N
F1=20 N
z
z
D
D
C
C
4m
4m
5m
F3=100 N
B
8m
6.739m
y
1359.336
8
F2=200 N
E
4693.87m
z’
m
12
x
178.48
12m
γ=16.24o
8m
4m
A[4,8,-12]
8m
β =73.76o
y’
α=89.906o
x’
F1 = F1
F2 = F2
F3 = F3
F3=100 N
B
m
F2=200 N
E
x
m
5m
rAC
rAC
( −5−4 ) ( −8−8 ) ( 4−( −12 ))
−9 i −16 j +16k
= −7.392 i −13.14 j +13.14k
= 20
9 2 +16 2 +16 2
rAB
rAB
( 0−4 ) ( 8−8 ) ( 0−( −12 ))
−4 i +0 j +12k
= 200
= −63.246 i +189.737k
4 2 +122
rAC
rAC
( 4−( −5 )) ( 8−0 ) ( 0−4 )
9 i +8 j −4k
= 70.93 i + 63.05 j − 31.52 k
=100
92 + 8 2 + 4 2
FR = F1 + F2 + F3
FR = [ −7.392 i − 13.14 j + 13.14k] + [ −63.246 i + 189.737k ] + [70.93 i + 63.05 j − 31.52k]
i , j ve k değerleri kendi içinde toplanır
i
j
k
FR = (−7.392 − 63.246 + 70.93) + (−13.14 + 63.05) + (13.14 + 189.737 − 31.52)
0.292
FR = 0.292 i + 49.91 j + 171.357k
49.91
171.357
FR = 0.2922 + 49.912 + 171.3572
39
0.5
= 178.48 N
4m
A[4,8,-12]
y
BÖLÜM I
VEKTÖRLER
x ekseni
u=
y ekseni
z ekseni
FR
0.292 i
49.91j
171.357k
=
+
+
FR
178.48
178.48
178.48
0.0016
0.28
0.96
cos α=89.906o
cos β=73.76o
cos γ =16.24o
rOA = 4 i + 8j − 12k
M0 =
rOB = 0 i + 8j + 0k
i
j
k
4
8
−
12
−7.39 −13.14 13.14
Fxi
cos89.906 = 0.292
Fy j
FR = FR .u = 178.48 cos73.76 = 49.91
Fzk
cos16.2
4
= 171.358
rOB = 8 i + 4j + 0k
i
i
j
k
j
k
+
0
8
0
+
8
4
0
−63.246 0 189.737 70.93 63.05 −31.52
[(8⋅13.14)−(−12⋅(−13.14)]i=−52.56i
−[4⋅13.14)−(−12⋅(−7.39))]j=−36.12j
[4⋅(−13.14)−(8⋅(−7.39))]k =6.56k
[(8⋅189.737)]i=1517.90i
0j
[8⋅63.246]k =505.97k
[4⋅(−31.52)]i=−126.08i
−[8⋅(−31.52)]j=252.16 j
[8⋅63.05−4⋅70.93]k=220.68k
M0 = 1339.26 i + 216.04 j + 733.21k
Bileşke vektörün uygulama noktasının bulunması için bileşke kuvvetin orijine göre momenti diğer üç
kuvvetin orijine göre momentlerine eşit olması şartından aşağıdaki şekilde bulunur.
R birleşke kuvvetin " O" momenti
M0 = 1339.26 i + 216.04 j + 733.21k =
i
j
k
x
y
z
0.292 49.91 171.357
Üç denklemin çözümünden
x=6.739
x
z
= −[171.357x − 0.292z]
Mx j = 216.04 j =
0.292 171.357
y=-1359.336
x
y
Mxk = 733.21k =
= 49.91x − 0.292y
z = −4693.870
0.292 49.91
y
z
= 171.357y − 49.91z
Mxi = 1339.26 i =
49.91 171.357
Bulunan bileşen kuvvetin orijine göre momenti alınarak diğer üç kuvvetin orijine göre momentlerine
eşit olması durumu kontrol edilmiştir.
j
k
i
rOR = 6.739 i − 1359.336 j − 4693.870k M0 = 6.739 −1359.336 −4693.870 = 1339.31i − 215.84 j + 735.96k
0.292
49.91
171.357
Bileşen kuvvetin konumu doğru bulunduğu yukarıdaki çözümden görülmektedir.
40
BÖLÜM I
VEKTÖRLER
2.3. KUVVET ÇİFTİ
Kuvvet çifti,
c. Şiddetleri eşit
F
d. Yönleri zıt
e. Birbirine paralel
f.
-F
Bir doğrultudaki bileşenleri sıfır
g. Bir noktaya göre momentleri sıfır olmayan ve her noktaya göre momentleri
Fxdikmesafe olan
h. Etkidikleri cismi sadece dönmeye zorlayan
özellikleri bulunan kuvvet sistemine denir. Birbirine paralel ve zıt yönlü yani kuvvet çiftinin bir noktaya
göre momenti aşağıdaki şeklin incelenmesinden de görülebileceği gibi;
y
F
.
O
.
O
d
d
A
θ
r1
A
F
.
A
.
F
O
-F
M
r2
O
3’üde
x
F
MA=F d
eşit
z
∑ M o = r F sin θ = F d
∑ M o = r1 x F + r2 x ( −F) = [r1 − r2 ] x F = r x F
olarak hesaplanır. Buna göre bir kuvvet çiftinin her noktaya göre momenti aynı ve kuvvetler
arası dik mesafe [d] ile kuvvetin şiddetinin çarpımına eşittir. Kuvvet çiftini temsil eden F ve yönü
değişmediği müddetçe kuvvet çifti değişmez. Bu kuvvet çiftlerini başlangıçtaki düzlemlerine paralel
herhangi bir düzleme taşımak kuvvet çiftini değiştirmez. Bir otomobil lastiğinin bulonlarını açmakapama, dişli olan bir kapağı açma-kapama gibi.
ÖRNEK 2.5. Şekilde verilen kuvvet çiftinin momentini R ve P noktalarında bulunması.
y
y
-F=4i-9j [N]
4i+8j
r2
r
-F=4i-9j [N]
4i+8j
r2
R=9i+6j
r1
O=6i+4j
F
F
O
y
-F=4i-9j [N]
4i+8j
x
F
6i+4j
x
O
6i+4j r1
O
O noktasına göre MO = r x [−F] = [[4i − 6i ] + [8 j − 4 j ]]x [−4i + 9 j ] = −18k + 16k = −2.00 [N]
41
x
P=12i
BÖLÜM I
VEKTÖRLER
R noktasına göre MR
j i
i
= r1 x [F ] + r2 x [ −F ] = − 3 − 2 + − 5
4 − 9 − 4
j
2 = −2.00 [N]
9
j i
j
i
P noktasına göre MP = r1 x [F] + r2 x [ −F] = −6 4 + −8 8 = −2.00[N]
4 − 9 −4 9
Görüldüğü gibi bir kuvvet çiftinin momenti her noktada aynı olmaktadır.
2.4. BİR KUVVETİN BAŞKA BİR NOKTAYA TAŞINMASI
Başlangıç noktası ile verilen bir kuvvetin [Şekil 4.a] başka bir noktaya taşınması,
a. Verilen kuvvet paralel olarak istenen noktaya taşınır [Şekil 4.b].
b. Taşınan kuvvetin şiddetinde ve ters yönde bir kuvvet ilave edilerek cismin dengesi
bozulmadan korunur [Şekil 4.b].
c. Böylece “0” noktasında bir kuvvet çifti [F, -F] ve bir [F] kuvveti elde edilmiş olur [Şekil 4.b].
[a]
-F
[c]
[b]
Mo’
0’
r
0
F
r
Mo
F
0
r
r’
0
0
F
F
[d]
r
F
Şekil 4.
d. Bilindiği üzere bir kuvvet çitinin momenti Mo = r x F olduğu için ilk başta verilen [Şekil
4.a] sistem bir kuvvet ve kuvvet düzlemine dik momentten oluşan bir sistem olarak
alınması uygundur [Şekil 4.a]. Buna göre “Rijit cisme etkiyen herhangi bir kuvvet
taşınmak istenen noktaya moment [ Mo = r x F ] eklenmek suretiyle istenilen
noktaya taşınabilir.”
e. Aynı F kuvveti “0’” noktasına taşınmak istenirse moment Mo' = Mo + r ' x F olur [Şekil
4.d]. Burada bir momentin bir noktaya taşınması [momenti] kendisine eşit olduğu
görülmektedir.
ÖRNEK 2: Şekilde verilen 200 N’luk kuvvetin A noktasına taşınması.
y
200 N
45o
B
4m
Sinüs teoremi
A
A
B
C
=
=
sin α sin β sin γ
8m
42
x
BÖLÜM I
VEKTÖRLER
Çözüm: 200 N A noktasına aşağıdaki gibi dik mesafe ile çarpımıyla taşınır [Varignon, 1654-1722].
y
200 N
y
y
B
B
200 N
o
45
45o
B
m
4
4m
4m
45o
Sinüs teoreminden
d=4xsin45=2.828 m
or
d=(22+22)0.5=2.828 m
A
4
A
x
d
200 N
m
A
x
MA=200x2.828=565.6 kNm
x
565.6 kNm
VEYA 200 N birleşenlerine ayrılarak matris formatıyla moment ifadesi yazılarak taşınır.
y
y
200 N
200 N
45o
45o 141.4 N
j
k
i
MA =rxF= −8
4
0 =−565.6k
−141.4 141.4 0
B
B
141.4 N
4m
r
4m
A
A
x
m
x
8
565.6 kNm
2.5. KUVVETLER SİSTEMİNİN KUVVET [R] VE KUVVET ÇİFTİNE [M] İNDİRGENMESİ
Birden çok kuvvetin bulunduğu bir sistemde,
f.
Rijit cismin “0” noktasına başlangıç noktalarının uzaklıkları r1, r2 …..rn olan F1, F2 …..Fn
kuvvetleri bulunsun [Şekil 5.a].
g. “Bir kuvvetin bir noktaya [0] taşınması için bu noktaya Mi=rixFi gibi bir kuvvet çifti eklenir”
özelliği kullanılarak tüm kuvvetler “0” noktasına taşınır [Şekil 5.b].
h. Taşınan kuvvet [Fi] ile bu kuvvete karşı konan [Mi] momenti bir birine dik olur [Şekil 5.b].
i.
“0” noktasına taşınan kuvvetler ve kuvvet çifti momentler kesiştikleri için toplanarak
bileşke kuvvet [R=Σ
ΣFi] ve bileşke moment M R
O=
[a]
F1
r1
rn
0
Fn
R
M1
0
=
Fn =
F2
M2
Mn
j.
[c]
F1
[b]
r2
∑ [ri x Fi ] bulunur [Şekil 5.c].
MRo
0
F2
5.
Bulunan bileşke kuvvet [R=Σ
ΣFi] Şekil
ile bileşke
moment [ M R
O=
değildir [Şekil 5.c].
k. Bileşke kuvvet [R] ve moment M R
O indirgenmesi;
1. Yer vektörü r = xi + y j + zk
2. Kuvvetler F = Fxi + Fyj + Fzk
43
∑ [ri x Fi ] ] birbirine dik
BÖLÜM I
VEKTÖRLER
3. Bileşke kuvvet R = R xi + R yj + R zk ve şiddeti R =
R 2xi + R 2yj + R 2zk
R
R
R
R
R2
R2
R2
4. Bileşke moment M R
0 = M xi + M yj + M zk ve şiddeti M 0 = M xi + M yj + M zk
bağıntılarıyla hesaplanır.
l.
Şekil 5.a’ daki gibi bileşke kuvvet ile bileşke moment “0” noktasına toplandıktan sonra “ 0’
” noktasına taşınması istenirse;
[b]
MRo
R
0
r’
[a]
=
MRo
R
0’
’
0
Şekil 6:
1.
R bileşke kuvveti aynı kalır [Şekil 6.a]
2.
R
MR
O' = M O + r ' x R
3. R ve M R
O' birbirine dik değildir. [Şekil 6.b]
Verilen hangi kuvvetler bir kuvvet çiftine indirgenebilir? Bulunan bileşke kuvvet [R=ΣFi] ile bileşke
moment [ M R
O = ∑ [ri x Fi ] ] bir birine dik olan kuvvetler bir kuvvet çiftine indirgenir. Bu kuvvetler,
1. Aynı noktada kesişen kuvvetler. [Bu kuvvetler toplanarak R bileşke bulunur.]
2. Aynı düzleme etkiyen kuvvetler.
a. Verilen kuvvetlerin toplanması ile bileşkesi R bulunur[Şekil 7.b].
b. Kuvvetlerden oluşan M R
O=
∑ [ri x Fi ] bulunur [Şekil 7.b].
c. R “0” noktasından M R
O oluncaya kadar [d] kaydırılır [Şekil 7.b].
y
y
y
[a]
[c]
[b]
R
F1
MRo
MRo
0
x
F2
=
0
x
=
d
R
d=
Fn
x
0
R
o
M
R
Şekil 7.
3. Paralel kuvvetler
a. Kuvvetler y eksenine ve birbirine paralel [Şekil 8a].
b. Kuvvetlerin bileşkesi [R] y eksenine paralel.
c. Bileşke R=0 olabilir. Böyle ise bu kuvvetler tek kuvvet çiftine indirgenmiş olur.
d. R=0 ve M R
o = 0 ise uygulanan kuvvetler rijit cisme hiçbir etki yapmazlar. Bu duruma cisim
“DENGEDE” denir.
e. Kuvvetler herhangi bir eksene paralel ise diğer eksenlerde moment oluşturur.
f.
“0” noktasındaki kuvvet R ve kuvvet çifti M R
o dir [Şekil 8b].
44
BÖLÜM I
VEKTÖRLER
y
y
y
R
F2
F3
R=Σ
ΣF
F4
x
0
x
0
[a]
z
i
x
r
0
z
[b]
Şekil 8.
Ry=0 ise sistem tek bir kuvvet
z
x
MR
o
M Rx k
F1
z
M Rx
[c]
çiftine M R
o indirgenir. Ry≠ 0 olması durumunda ise tek
bir kuvvet çiftine indirgemek için bileşke kuvvet aynı M R
o momentini sağlayacak şekilde bir notaya
taşınır [Şekil 8c]. Buna göre moment değerleri;
R
R
MR
o = r x R = [ xi + zk ] x Rj = M x i + M z k
M Rx = − z R y
MR
k = x Ry
elde edilir. Burada y eksenine paralel Ry kuvvetinin diğer eksenlerde oluşturduğu moment değerlerini
göstermektedir.
Uygulama: Sistemde verilen kuvvet ve momenti D noktasına taşıyınız (D noktasındaki kuvvet çiftini bulunuz).
y
y
C
C
200 kNm
200 kNm
14
D
z
A
14
300 kN
D
z
45
15
18
Kuvvetin birleşenleri FAB = 300
10
rAB
rAB
A
300 kN
45
x
B
15
18
10
B
( 63−45 ) ( 0−14 ) ( 15−25 ))
18 i −14 j −10k
= [ 216.87 i −168.68 j −120.48k ]kN
= 300
18 2 +14 2 +10 2
( 0−45 ) ( 14−14 ) ( 0−25 ))
−45 i −0 j −25k
r
= −174.83 i − 97.13 k
Momentin birleşenleri M = 200 AC = 200
rAC
45 2 + 25 2
j
k
i
MD = MAC + r AD xF AB = −174.83 i − 97.13 k + 45
14
0
216.87 −168.68 −120.48
MD = [ −1861.55 i + 5421.60 j −10723.91k ]kNm (Momentten ve kuvvetten oluşan)
D noktası
FD = [ 216.87 i −168.68 j −120.48k ]kN (Kendisi)
45
x
BÖLÜM I
VEKTÖRLER
Uygulama 1: Şekilde verilen kuvvet (315 N) ve momenti (70 Nm) D noktasına taşıyınız.
y
y
240 mm
70 Nm
B
240 mm
A
B
60 mm
120 mm
D
A
180 mm
D
360 mm
x
z
x
z
60 mm
120 mm
180 mm
360 mm
180 mm
315 N
ÇÖZÜM: Kuvvet ve momentin ayrı ayrı eksenlerdeki bileşenleri bulunur:
360i − 120j + 180k
FAC = 315.
2
2
2
360 + 120 + 180
MDA = MAB + rDA x FAC
C
240i − 180k
= (270i − 90j + 135k )N MAB = 70
2402 + 1802
= ( 56i − 42k ) Nm
rDA = ( −360i + 120j + 180k ) mm
j
k
i
56i
−
42
k
=
+
=
−
M
M
r
x
F
0.36
0.12
0.18
)
DA
AB
DA
AC
(
= (88.40i − 97.20j − 42k ) Nmm
270 −90 135
Uygulama: Şekilde verilen sistemde A noktasındaki bileşke kuvveti ve momenti bulunuz.
Çözüm: Verilen kuvvetler işaret ve eksenlerine göre toplanarak bileşke kuvvet bulunur.
46
BÖLÜM I
VEKTÖRLER
Birleşke Kuvvet R = [( −300 −120 ) i + ( −50 ) j + ( −250 )k ]N = [( −420 ) i + ( −50 ) j + ( −250 )k ]
R = ( 420 2 + 50 2 + 250 2 )0.5 = 491.325 N
A noktasındaki moment :
r B x ( ( −300 ) i +( −50 ) j )
MRA = r B x ( ( −300 ) i + ( −50 ) j ) + r D x ( ( −250 )k ) + r E x ( ( −120 ) i )
r D x ( ( −250 ) k )
r E x ( ( −120 ) i )
k i
j
k
j
i
M A = 0.2
0 0 + 0.2 0 0.16 +
−300 −50 0 0 0 −250
j
k
i
0.2 −0.1 0.16
−120
0
0
R
0.2 x ( −50 )=−10 k
−0.2 x ( −250 ) j =50 j
= ( 30.8 ) j + ( −22 )k ]Nm
0.16 x ( −120 ) j −0.1 x 120 k =−19.2 j −12 k
R=491.325 N’luk kuvvet acaba nereye etkiyor?
j
k
i
ry
rz = [50rz − 250ry]i −[420rz − 250rx] j + [420ry − 50rx]k
MRA = ( 30.8 ) j + ( −22 )k ]Nm = Rx r R = rx
−420 −50 −250
0 = [50rz − 250ry]i
( 30.8 ) j = [420 rz − 250rx] j 3 denklem çözülecek
( −22 )k ] = [420ry − 50 rx]k
ÖRNEK 3: Şekilde verilen kuvvetleri ve momenti (500 Nm) A noktasına taşıyınız.
y
3m
İlk önce 300 N’luk kuvvet birleşenlerine ayrılır;
300 N
3m
−4i+3 j+3k
F=300
=−205.80i+154.35 j+154.35k
42 +32 +32
C
B
4m
200 N
Kuvvetlerin A noktasına taşınması;
100 N
6m
500 Nm
A
4m
∑Fx =200−205.8=−5.80 N
{
2
2
2
FBileşke = 5.8 + 454.35 +354.35 =576.22N
∑Fy =200+154.35+100=454.35 N
cos−1αx = 5.8 =89o βy =38o γ z =52o
576.22
∑Fz =200+154.35=354.35 N
E
m
6
200 N
z
D
200 N
6 j−6k
MDB momentinin A noktasına taşınması; MDB =500
=353.55 j−353.55k
62 +62
Bir kuvvetin başka bir noktaya taşınması, kuvvetin taşınmak istenen noktaya aynı şiddet ve doğrultuda
etkimesi ve kuvvetin şiddeti ile taşıma mesafesinin dik birleşeni ile çarpımından elde edilen momentin
istenen noktaya etkimesiyle olur. Kuvvetin bu şekilde taşınmasına karşın momentin taşınması
momentin istenilen o noktaya aynı şiddet ve yönde etkimesiyle olur. Buna göre verilen kuvvetlerin ve
MDB momentinin A noktasındaki momentleri aşağıdaki şekilde elde edilir.
47
x
BÖLÜM I
VEKTÖRLER
j
k
j
k i
j
k
i
i
MA =[353.55 j−353.55k]MDB +
0
6
0
+ 0
0 6 +4 0
0
−205.8 154.35 154.35BC 200 200 0D 0 100 200E
[6x154.35−6x200]i
=[353.55 j−353.55k]MDB + −[ −6x200+200x4]j =−273.9i+[353.55+ 400]j+[2034.8−353.55]k
[6x205.8+ 4x200]k
MA = 273.92 +753.552 +1681.252 =1862.65 Nm
cos−1αx =− 273.9 =98.46o
1862.65
βy =66.14o
γ z =25.50o
A noktasında kuvvetlerin kendileri ve kendileri ile mesafelerin çarpımı kadar momentleri bulunur. Kuvvetlerin ve momentlerin A
noktasında birleşenleri ve eksenlerle yaptıkları açılar yukarıda bulunmuştur.
ÖRNEK 1: Şekilde verilen sistemde;
a: x, y ve z eksenlerindeki momentleri,
z
E
b: AD doğrultusundaki momenti hesaplayınız.
10
200 kN
A
B
20
400 kN
a: Verilen kuvvetin eksenlerdeki birleşenleri,
rDE =[ −12i−18 j+ 40k] F =
20
200
[ −12i−18 j+ 40k]=[ −52.77i−79.16 j+175.90k ]
2
12 +182 + 402
C
20
O
y
12
8
400
rCO =[12i+8j+20k] 24.66F=
[12i+8 j+20k ]=[194.65i+129.77j+324.41k]
122 +82 +202
D
x
Orjindeki (O noktasındaki) x, y ve z eksenlerine göre moment, DO=12i+8 j CO=12i+8 j+20k yer
vektörleri bulunarak aşağıdaki şekilde hesaplanır.
j
k i
j
k [1407.2 −0.12]i−[2110.8 −0.08] j+[ −527.76 + 0.04]k
i
M0 = 12
8
0 + 12
8
20 =
−52.77 −79.16 175.90 194.65 129.77 324.41 [1407.08i− 2110.72j−527.72k]kNm
Eğer her eksenin momenti ayrı hesaplanırsa matristeki aranan eksen numarasına 1 diğerlerine 0
yazılarak ayrı ayrı aşağıdaki şekilde hesaplanabilir.
1x'momenti
Mx =
12
−52.77
1x'momenti
0
0
8
0 +
12
8
20 = 1[1407.2 −0.12]=1407.08kNm
129.77 324.41
−79.16 175.90 194.65
0
0
0
1y'momenti
0 0
1y'momenti
0
My = − 12
8
0 + 12
8
20 = − 1[2110.80 −0.08] = −2110.72kNm
−52.77
−79.16 175.90 194.65
129.77
324.41
0
0
1z'momenti 0
0
1z'momenti
Mz = 12
8
0
8
20
+ 12
= 1[ −527.76 + 0.04]= −527.72kNm
−52.77 −79.16
175.90
194.65 129.77
324.41
48
BÖLÜM I
VEKTÖRLER
b: AD doğrultusundaki momenti bulmak için tüm kuvvetler A noktasına taşınır ve sonra AD doğrultman
değerleri ile çarpılarak AD doğrultusundaki moment aşağıdaki şekilde hesaplanır.
A
E
rAD=(0-12)i+(0-8)j+(40-0)k=-12i-8j+40k
z
20
10
200 kN
B
j
k
j
k
i
i
M = 12
0
8
40
0
40
−
+
−
=
A
−57.77 −79.16 175.9200N 194.65 129.77 324.41400N
A moment
=[ −1759.2i+200 j−487.76k ] +5190.8i−7786 j= 3431.6i −7586 j −487.76k
200
MAD =MA irAD = 3431.6i −7586 j −487.76k i 12i+8 j−40k =00
42.52
20
400 kN
C
20
O
y
12
8 D
x
VEYA; AD doğrultusundaki momenti bulmak için tüm kuvvetler D noktasına taşınır ve sonra DA doğrultman değerleri ile
çarpılarak DA doğrultusundaki moment aşağıdaki şekilde yukarıda hesaplanan AD doğrultusuyla aynı olarak hesaplanır.
j
k
j
k
i
i
M = 0
−12
0
0
+
−
8
0
=
D
−57.77 −79.16 175.9200N 194.65 129.77 324.41400N
D moment
=[0i+0j+0k ] −2595.28i+3892.92j−0.04k = −2595.28i +3692.92j −0.04k
200
MAD =MA irAD = −2595.28i 3692.92 j +0.04k i −12i−8j+ 40k =000
42.52
ÖRNEK 4: Şekilde verilen kuvvet (100 N, 200 N ve 400 N) ve momentin (600 Nm),
a) AB doğrultusunda oluşturacağı momenti (MAB)
b) Orjinden 14 m uzaktati S-S doğrultusundaki momenti (Mss) hesaplayınız.
Çözüm a: Eksenler üzerinde olmayan kuvvetlerin ve momentlerin birleşenleri bulunur.
y
y
600 Nm
−6 j+ 4k
FAC =200
=−166.41j+110.94k
62 + 42
2m
B
−2i+2j−2k
MP =600
=−346.42i+346.42j−346.42k
22 +22 +22
C
400 N
z
100N
6m
2m
S
O
m
m
z
x
2m
P
6
14m
4
200
N
A
B noktasındaki momenti bulunarak AB doğrutusundaki birim vektörle çarpılarak MBA aşağıdaki şekilde bulunur.
j k
j
k
j
k
i
i
i
M =[ −346.42i+ 346.42j−346.42k] + 0 0 4
6
6
+
0
4
+
0
0
P
B
100 0 0100N 0 −400 0400N 0 −166.41 110.94200N
B
=[ −346.42i+ 346.42j −346.42k ]P +− − 4x100 j+ 4x400i− 6x400k − 6x110.94 j− 6x166.41k
= 1253.58i +80.78 j −3744.88k
49
x
BÖLÜM I
VEKTÖRLER
B noktasında bulunan MB = 1253.58i +80.78 j −3744.88k momenti hangi doğrultuya taşınacak ise o
yöndeki birim vektörle (dogrultman cosinüsleri) çarpılarak taşınır.
Örnekte AB doğrultusunda taşınması isteniğine göre bu yöndeki birim vektör;
uAB =
−6i+ 6 j− 4k
62 + 62 + 42
=−0.64i+ 0.64 j−0.426k
ise
MAB =MB iuAB =[ 1253.58i +80.78 j −3744.88k ]iskaler [−0.64i+ 0.64 j−0.426k ]
MAB =(1253.58x( −0.64))i.i+(80.98x0.64)j.j+( −3744.88x( −0.426))k.k =−802.29 + 51.83 +1596.79 = 846.20Nm
VEYA A noktasındaki moment bulunarak da M AB aşağıdaki gibi aynısı bulunur.
j k
j
k
j
k
i
i
i
M =[ −346.42i+346.42j−346.42k] + −6 6 0
6
0
6
+0
+0
−4
P
A
100 0 0100N 0 −400 0400N 0 −166.41 110.94200N
A moment
[ −346.42i+346.42j−346.42k ]P −600k +00+00= −346.42i +346.42j −946.42k
M AB =M A i uAB = −346.42i +346.42j −946.42k i[ −0.64i+0.64 j−0.426k ]=846.59 Nm
Çözüm b: Kuvvetlerin eksenlere göre analizleri yukarıda yapılmıştı. Burada S noktasında tüm kuvvetlerden oluşan moment
hesaplanır ve S doğrusu boyunca hesaplanan doğrultman değerleri ile çarpılarak S doğrultusundaki moment aşağıdaki şekilde
hesaplanır.
j k
j
k
j
k
i
i
i
M =[ −346.42i+346.42j−346.42k] + −14 6 4
6
4
6
4
+ −8
+ −8
P
S
100 0 0100N 0 −400 0 400N 0 −166.41 110.94200N
S moment
[ −346.42i + 346.42j −346.42k]P +[ 00i + 400j +600k]100 +[1600i + 00 j +3200k]400
+[1331.28i + 877.52j +1331.28k]400 += 2584.86i +1623.94 j +4784.86k
M =M i u = 2584.86i +1623.94 j +4784.86k i[ j]=1623.94 Nm (y ekseninde)
S A ss
Soru 3: Verilen sistemde A-B doğrultusundaki momenti (MA-B=?) bulunuz.
y
Çözüm: F=800 N ve F=200 N’luk kuvvetin
C
eksenlerindeki bileşenleri bulunur.
800 N
6
A
B
4
8
x
4
z
16
16i−8 j+ 8k
0.8165 −0.4082 0.4082
F =800
= 653.2i−326.6 j+326.65k
2
2
2
16 + 8 +8
0
−8
MAB = 0
653.2 −326.6 326.6
rAC =−8k
16i−8 j+8k
0.8165⋅( −(8⋅326.6))=−2133.35i
ηAB =
=0.8165i−0.4082j+0.4082k −−0.4082⋅(8⋅653.2)= 2133.09 j
162 + 82 + 82
50
D
BÖLÜM I
VEKTÖRLER
ÖRNEK 1: Şekilde verilen sistemin A noktasında tutulduğu zaman dengede olması için A noktasına
uygulanması gereken kuvvet ve moment ne olmalıdır.
Çözüm: Verilen kuvvetlerin bileşenleri bulunur.
1. F=800 N ve F=200 N’luk kuvvetin eksenlerindeki bileşenleri bulunur.
10i−8 j+ 8k
F =800
=529.81i− 423.85 j+ 423.85k
2
2
2
10 + 8 +8
529.81i− 423.85 j+ 423.85k −y200 j= 529.81i− 623.85 j+ 423.85k
−8 j
B
F200 = 200 =−200 j
2
8
800 N
A
rAB =6i−8k
2.
-1000 Nm
6
200 Nm
D
4
8
3. F=800 N’luk kuvveten A’da oluşan M=rxF
E
200 N
4
x
z
3000 Nm
C
16
j
k
i
MA = 6
0.0
−8 Nm =[ −8⋅423.85]i −[8⋅529.81+ 6⋅423.85]j + [ −6⋅423.85]k =[ −3390.8i − 6781.58 j − 2543.1k ]Nm
529.81 −423.85 423.85
j
k
i
4. F=200 N’luk kuvveten A’da oluşan rAE = 6i
MA = 6
0
0 =−1200k
0 −200 0
∑MA =MAB +MAE =[[ −3390.8i−6781.58 j−2543.1k] −1200k ]=[ −3390.8i− 6781.58j−3743.1k]Nm
5.
D noktasındaki momentten dolayı A’da oluşan moment;
NOT: BİR MOMENTİN BİR NOKTAYA GÖRE MOMENTİ KENDİSİNE EŞİTTİR.
Buna göre D noktasındaki momentten dolayı A noktasında oluşan moment;
MA =[ 2000i−1000 j+3000k]Nm
6. Buna göre A noktasındaki toplam moment;
∑MA =MAB +MAE +MDmoment =[[ −3390.8i−6781.58j−3743.1k]]+ [2000i−1000j+3000k ]=
Kuvvetlerden
Momentten
[[ −1390.8i−7781.58j−743.1k ]]Nm
Kuvvetlerden+Momentten
∑F =F800 +F200 = 529.81i−623.85 j+423.85k
y
y
B
B
800 N
800 N
E
200 N
A
D
8
x
z
16
2000 Nm
4
D
423.85
C
z
16
7781.58 Nm
623.85
51
x
200 N
4
3000 Nm
4
-1000 Nm
529.8
E
743.1Nm
2000 Nm
4
8
1390.8 Nm
A
1000 Nm
3000 Nm
C
BÖLÜM I
VEKTÖRLER
Uygulama: Verilen kuvvetlerden dolayı A noktasında oluşan momentin hesaplanması.
45o
y
75
50
A
2000 kN
45o
C
50
B
30o
100
1200 kN
60o
100
x
D
2000 kN
z
E(150,-50,100)
Çözüm: Sistemde verilen kuvvetlerin eksenlerdeki birleşenleri bulunur.
75i−150 j+50k
FB =2000 2
=858i−1714 j+578k
2
2
75 +150 +50
Kuvvetlerin analizi FC =2000(cos45i−cos45 j)=1414i−1414 j
R=∑F=2872i−2089 j+578k
F =1200(cos60i+cos30 j)=600i+1039 j
D
{
A noktasında oluşan moment her bir kuvvetin eksenlerdeki birleşenlerinin başlangıç noktasının A
noktasına olan yer vektörü ile çarpımıyla aşağıdaki şekilde bulunur.
FB
R
MA
=
i
j
k
0.075
0
0.050 +
858 −1714 578
i[1714⋅0.05]=85.7i
− j[0.075⋅578−0.05⋅858]=−0.45 j
k[−1714⋅0.075]=−128.55k
FC
FD
i
j
k
0.075 0 −0.050
1414 0 1414
i
j
k
0.10 −0.10 0
600 1039 0
i=0
− j[0.075⋅1414+0.05⋅1414]=−176.75 j
k=0
+
∑ 85.7i
∑ −177.2 j
∑ 35.35k
i=0
− j=0
k[1039⋅0.1+600⋅0.1]=163.90k
Bileşke vektörün uygulama noktasının bulunması için bileşke kuvvetin orijine göre momenti diğer üç
kuvvetin orijine göre momentlerine eşit olması şartından aşağıdaki şekilde bulunur.
R birleşke kuvvetin "O" momenti
i
j
k
x
y
z
2872 −2089 578
Üç denklemin çözümünden
y
z
= 578y + 2089z
Mxi = 85.70 i =
−2089 578
x=0.0429
x
z
= −[578x − 2872z]
Mx j = −177.20 j =
2872 578
y=0.0435
x
y
= −2089x − 2872y
Mxk = 35.351k =
2872 −2089
z = −0.0531
M0 = 85.70 i − 177.20 j + 35.35k =
52
BÖLÜM I
VEKTÖRLER
R birleşke kuvvetin "O " momenti
i
j
k
M0 = 85.70 i − 177.20 j + 35.35k = 0.0429 0.0435 −0.0531
2872 −2089
578
M0 = 85.70 i − 177.20 j + 35.35k = 85.78 i − 177.29 j + 35.31k
Bulunan bileşen kuvvetin orijine göre momenti alınarak diğer üç kuvvetin orijine göre momentlerine
eşit olması durumu kontrol edilmiştir. Bileşke kuvvet orijine yakın bir nokta bulunmaktadır.
ÖRNEK 1.7. Şekilde gösterilen kuvvetlerin bileşkesinin şiddetini (R) ve konumunu (x,y,z) bulunuz.
z
F1=20 N
F1=20 N
z
D
D
C
4m
C
4m
5m
F3=100 N
B
8m
6.739m
m
5m
F3=100 N
B
m
1359.336
8
F2=200 N
y
F2=200 N
E
m
4693.87
E
x
z’
x
178.48
12m
γ=16.24o
12m
8m
4m
A[4,8,-12]
β =73.76o
8m
y’
α=89.906o
x’
F1 = F1
F2 = F2
F3 = F3
rAC
rAC
( −5− 4 ) ( −8− 8 ) ( 4 −( −12 ))
−9 i −16 j +16k
= −7.392 i −13.14 j +13.14k
= 20
9 2 +16 2 +16 2
rAB
rAB
( 0 − 4 ) ( 8 −8 ) ( 0−( −12 ))
−4 i +0 j +12k
= 200
= −63.246 i +189.737k
4 2 +122
rAC
rAC
( 4 −( −5 )) ( 8 −0 ) ( 0 − 4 )
9 i +8 j −4k
= 70.93 i + 63.05 j − 31.52 k
= 100
92 + 82 + 42
FR = F1 + F2 + F3
FR = [ −7.392 i − 13.14 j + 13.14k] + [ −63.246 i + 189.737k ] + [70.93 i + 63.05 j − 31.52k ]
53
4m
A[4,8,-12]
y
BÖLÜM I
VEKTÖRLER
j
i
k
F
(
−
7.392
−
6
3.246
+
70.93)
−
+
+
(13.14
189.737
+
(
13.14
63.05)
+
− 31.52)
=
R
değerleri kendi
0.292
49.91
171.357
0.5
içinde toplanır
F = 0.292 i + 49.91 j + 171.357k FR = 0.2922 + 49.912 + 171.3572 = 178.48 N
R
i , j ve k
x ekseni
u=
y ekseni
z ekseni
FR
0.292 i
49.91j
171.357k
=
+
+
FR
178.48
178.48
178.48
0.0016
0.28
0.96
cos α=89.906o
cos β=73.76o
cos γ =16.24o
rOA = 4 i + 8j − 12k
M0 =
rOB = 0 i + 8j + 0k
i
j
k
4
8
−
12
−7.39 −13.14 13.14
Fxi
cos89.906 = 0.292
Fy j
FR = FR .u = 178.48 cos73.76 = 49.91
Fzk
cos16.24 = 171.358
rOB = 8 i + 4j + 0k
i
i
j
k
j
k
+ 8
+
0
8
0
4
0
−63.246 0 189.737 70.93 63.05 −31.52
[(8⋅13.14)−(−12⋅(−13.14)]i=−52.56i
−[4⋅13.14)−(−12⋅(−7.39))]j=−36.12j
[4⋅(−13.14)−(8⋅(−7.39))]k=6.56k
[(8⋅189.737)]i=1517.90i
0j
[8⋅63.246]k =505.97k
[4⋅(−31.52)]i=−126.08i
−[8⋅(−31.52)]j=252.16 j
[8⋅63.05−4⋅70.93]k=220.68k
M0 = 1339.26 i + 216.04 j + 733.21k
Bileşke vektörün uygulama noktasının bulunması için bileşke kuvvetin orijine göre momenti diğer üç
kuvvetin orijine göre momentlerine eşit olması şartından aşağıdaki şekilde bulunur.
R birleşke kuvvetin "O" momenti
i
j
k
x
y
z
0.292 49.91 171.357
y
z
= 171.357y − 49.91z Üç denkle min çözümünden
Mxi = 1339.26 i =
49.91 171.357
x=6.739
x
z
Mx j = 216.04 j =
= −[171.357x − 0.292z]
0.292 171.357
y=-1359.336
x
y
z = −4693.870
= 49.91x − 0.292y
Mxk = 733.21k =
0.292 49.91
M0 = 1339.26 i + 216.04 j + 733.21k =
Bulunan bileşen kuvvetin orijine göre momenti alınarak diğer üç kuvvetin orijine göre momentlerine
eşit olması durumu kontrol edilmiştir.
rOR
j
k
i
= 6.739 i − 1359.336 j − 4693.870k M0 = 6.739 −1359.336 −4693.870 = 1339.31i − 215.84 j + 735.96k
0.292
49.91
171.357
Bileşen kuvvetin konumu doğru bulunduğu yukarıdaki çözümden görülmektedir.
54
BÖLÜM I
VEKTÖRLER
ÖRNEK 1.7. MOE=?
F1=20 N
F1=20 N
z
5m
C
5m
5m
F3=100 N
B
8m
5
4m
m
5
8m
F3=100 N
B
8m
y
F2 = F2
F3 = F3
rOE
y
E
x
m
12
F1 = F1
8m
F2=200 N
F2=200 N
8m
E
4m
m
E
x
D
5m
E
4m
C
4m
z
D
12m
4m
A[4,8,-12]
8m
rAC
rAC
( −5−4 ) ( −8−8 ) ( 4−( −12 ))
−9 i −16 j +16k
= −7.392 i −13.14 j +13.14k
= 20
9 2 +16 2 +16 2
rAB
rAB
( 0−4 ) ( 8−8 )( 0−( −12 ))
−4 i +0 j +12k
= 200
= −63.246 i +189.737 k
4 2 +122
rAC
rAC
( 4−( −5 )) ( 8−0 ) ( 0−4 )
9 i +8 j −4 k
= 70.93 i + 63.05 j − 31.52 k
=100
92 + 82 + 42
−15i
152 +82 +42
−0.859
= −15 i + 8 j − 4k M0 = 4
−7.39
8j
15 2 +8 2 +4 2
0.458
8
−13.14
4m
A[4,8,-12]
FR = F1 + F2 + F3
8j
−15i
−4i
8j
−4i
−15i
17.46
17.46
17.46
17.46
17.46
17.46
−0.229 −0.859 0.458 −0.229 −0.859 0.458 −0.229
8
0 + 8
4
0
−12 + 0
13.14 −63.246
0
189.737 70.93 63.05 −31.52
−4i
152 +8 2 +4 2
= −1150.42 i −132.03 j −167.91k
rEO =15 i − 8 j + 4 k
15 i
152 +82 +42
0.859
M0 = 4
−7.39
−8 j
15 2 +8 2 +4 2
−0.458
8
−13.14
−8 j
15i
4i
−8 j
4i
15i
17.46
17.46
17.46
17.46
17.46
17.46
0.229 0.859
−0.458 0.229 0.859 −0.458 0.229
−12 + 0
8
0 + 8
4
0
13.14 −63.246
0
189.737 70.93 63.05 −31.52
4i
152 +8 2 +4 2
=1150.42 i +132.03 j +167.91k
55
BÖLÜM I
VEKTÖRLER
Uygulama: Şekilde verilen sistemde AE kablo kuvveti 500N ise “O” noktasında oluşan momenti AO
ve EO yönlerinde olmak üzere bulunuz.
9 cm
9 cm
12 cm
12 cm
16 cm
16 cm
12 cm
12 cm
Çözüm: Önce kuvvetin eksenlerdeki birleşenleri bulunur ve sonra AO doğrultusundaki moment
yazılır.
FEA = 500
rEA
rEA
( 12−( −9 ) ( 0−16 ) ( 12−0 ))
21 i −16 j +12k
= 362.07 i − 275.86 j + 206.90k
= 500
212 +16 2 +122
rAO = −9 i +16 j
Mo = rAO xFAE
j
k
i
= −9
16
0 = 3310.4 i +1862.1j − 3310.38k
362.07 −275.86 206.90
EO doğrultusundaki moment aşağıdaki şekilde yazılır.
FAE = − FEA = −362.07 i + 275.86 j − 206.90k
rEO =12 i +12k
Mo = rEO x −FEA
i
j
k
= 12
0
12 = −3310.12 i −1862.04 j + 3310.32k
−362.07 +275.86 −206.90
AO ve EO yönlerinde oluşan moment mutlak değerce aynı sadece işaretleri ters olmaktadır. Bu durum
momentlerde dönüş yönünün etkili olduğunu göstermektedir.
56
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.6. Verilen sistemde 800 N’luk kuvvetin O noktasına göre momentinin hesaplanması
[kuvvetin bazı
özelliklerini kullanarak 4 değişik yoldan]
Moment kolu olan “O” noktasına dik d mesafesinin hesaplanması aşağıdaki şekilde olur.
x
8
⇒ x = 6.71m
=
sin 40 sin 50
x 1 = 6.712 + 8 2 = 10.44 m
veya
tan 40 =
x
8
x = 6.71m x ' = 6.71 − 4 = 2.71m
x2
x'
⇒ x 2 = 2.71 x sin 40 = 1.74
=
sin 40 sin 90
d = x 1 − x 2 = 10.44 − 1.74 = 8.70 m
M =Fd
d = 8 cos 40 + 4 sin 40 = 8.70 m
M = 800 . 8.70 = 6960 Nm
Varignon teoremi M=F .d=Fx.y+ Fy.x
M=612.84 x 8 +514.23 x4=6959.64 Nm
Kuvvetlerin kaydırılabilme özelliği ile B noktasına kaydırılmış ve çarpanlarına ayrılmıştır. Buna göre;
M=F .d=Fx.[8+d1]+ Fy.x
d1=4sin40/sin450=3.36 veya d1=4tan40=3.36
M=612.84 [8+3.36]+514.23x0=6961.86 Nm
C noktasına kaydırılmış ve çarpanlarına ayrılmıştır. Buna göre
M=F.d=Fx.x+ Fy. [4+d2]
veya
d2=8sin50/sin40=9.53 m
d2=8/tan40=9.53 m
M=514.23 [4+9.53]+612.84x0=6959.60 Nm
57
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.8. x eksenine paralel olan 5x8 m lik plak şekildeki gibi asılı durmaktadır. Buna göre
M0 A = ?
M0B = ?
M0D = ?
momentlerinin hesaplanması istenmektedir.
y
y
E
E
F=800 N
F=800 N
8m
8m
4m
4m
z
A
5
x
m
z
m
3
4
m
4
D
3m
m
ηoD
D[-3,4]
C
A
ηoB
r
4m
x
4m
C
B[8,-3,4]
B
rCE = [ 4i + 11j − 4k ]
F=
800
4 2 + 112 + 4 2
[ 4i + 11j − 4k ] = [258.71i + 711.44 j − 258 .71k ]
r oc = [ 4i − 3 j + 4k ]
Mo
i
= 4
258 .71
j
−3
= [ −2069 .63i − 2069 .630 j + 3621 .89k ]
− 258.71
k
4
711.44
x eksenine paralel MoA ekseni boyunca olan momentin hesabı
MoA = Mo i = [ −2069 .63 i − 2069 .68 j + 3621 .89 k ] i = −2069 .63 Nm
8i − 3j + 4k
MoB = Mo ηoB = [ −2069.63i − 2069.68j + 3621.89k]
82 + 32 + 42
−2069.63 x8 − 2069.68x( −3) + 3621.89 x 4
= 438.80 Nm
82 + 32 + 42
Bir kuvvetin bir noktaya göre momentini momenti orijine taşımadan da istenilen noktaya moment
olarak taşınabilir. Bunun için aşağıdaki matriste görüldüğü gibi ilk satıra i, j ve k yerine kuvvetin
taşınacağı doğrultunun cosinüs doğrultman değerleri yazılır.
uay
uax
Mo = r x F rx
ry
Fy
Fx
8i
= 0.848
82 + 32 + 4 2
0.848
Mo =
4
258.71
uaz
rz = uax Fz ry − Fyrz i − ua y [ Fz rx − Fxrz
Mx
My
Fz
−3 j
4i
=−0.318
= 0.424
82 + 32 + 4 2
82 + 32 + 4 2
−0.318
0.424
=
−3
4
711.44
−258.71
] j + ua
z
Fy rx − Fxry k
Mz
Mo = [ 0.848( −2069.63i )] + [ −0.318 ( − 2069.630j)] + [ 0.424(3621.89k)]
VEYA
8 i − 3j + 4 k
MoB = [ −2069.63 i − 2069.68 j + 3621.89 k ]
= −1755.04 + 658.16 + 1535.68
9.433
MoB = 438.80 Nm
58
BÖLÜM I
VEKTÖRLER
− 3j + 4k
M oD = M o η oD = [ −2069 .63 i − 2069 .68 j + 3621 .89 k ]
32 + 4 2
− 3j + 4k
= [ −2069 .63 i − 2069 .68 j + 3621 .89 k ]
= 1241 .81 + 2897 .51 = 4139 .32 Nm
5
Uygulama: Şekilde verilen sistemin dengede olması için F=?
B
y
C
5
F=?
4
4
x
6
A
100 Nm
400 N
4
200 Nm
G
z
4
E
D
300 Nm
Çözüm: Verilen kuvvetlerin eksenlerdeki birleşenleri bulunur.
400
F=
[8i − 5j + 10k] = [232.77 i − 145.48j + 290.96 k]
rBD = [8i − 5j + 10k]
2
8 + 102 + 52
Kuvvetlerin analizi
F
rCE = [4j − 4k]
F=
[4j − 4k] = F[0.707j − 0.707 k]
2
4 + 42
G noktasına göre moment alınması için kuvvetlerin uygulama noktaları (B ve E) ile G arasındaki yer
vektörleri aşağıdaki şekilde bulunur.
rGB = [ −5j + 10k]
Kuvvetlerin G noktasına olan doğrultmanları
r = [8i − 10k]
GE
ηGB =
ηGE =
[ −5j + 10k]
52 + 102
[8i − 10k]
82 + 102
= [ −0.447j + 0.8944 k]
= [0.625i − 0.781k]
−0.447 0.8944 0.625
0
−0.781
0
MG = 0
−5
10 + 8
0
−10 F =
232.77 −145.48 290.96 0
0.707 −0.707
[( −0.447)( −10x232.77)]j + [(0.8944)(5x232.77)]k
=
= 1040.48j + 1040.95k + [4.42i − 4.42k]F
[[(0.625)(10x0.707)]i + [( −0.781)(8x0.707)]k ]F
MG = −200i + 100j + 300k = 1040.48j + 1040.95k + [4.42i − 4.42k]F
F = ( −200 / 4.42) = −45.25i + [(300 − 1040.95) / 4.42] = 167.64k
F = (45.422 + 167.642 )0.5 = 173.64
59
BÖLÜM I
VEKTÖRLER
400
F=
[8i − 5j + 10k] = [232.77 i − 145.48j + 290.96 k]
rBD = [8i − 5j + 10k]
2
8 + 102 + 52
Kuvvetlerin analizi
173.64
rCE = [4j − 4k]
F=
[4j − 4k] = [122.76j − 122.76 k]
42 + 4 2
j
k i
j
k
i
MG = 0
−5
10 + 8
0
−10 = −2327.7 j + 1163.85k + 1227.6i − 982.08j + 982.08k
232.77 −145.48 290.96 0 122.76 −122.76
ÖRNEK 2.9. Şekildeki Sistemde B noktasına 500 N uygulanmıştır. Buna göre v eksenine göre
momentin değerinin hesaplanması [M0v=?] ve vektörel gösterimi.
50
F
B
B
6
4
50
o
F=500 N
60
o
y
100
x
o
m
B
rCB
-vycos40
C
v
z
z
z
y
m
2
m
v
o
C
50
o
x
x
m
4
m
3.46
6
m
2
m
y
vxcos50
Önce F kuvvetinin her eksendeki iz düşümü bulunur.
F = 500[cos 100i + cos 60 j + cos 50k ] = [ −87.00i + 250.00 j + 321.39k ]
r CB = [2i + 3.46j + 6k]
Mo = r CB
i
xF = 2
−87
j
k
3.46
6
250 321.39
Mo = [ −387.99i + 1164.78j + 801.02k
v yönündeki moment için v yönündeki ucv bulunur ve bu değer Mo değeri ile skalar olarak çarpılır.
ucv = [cos50i − cos 40j]
M = Mo .ucv = [ −387.99i + 1164.78j + 801.02k].[cos50i − cos 40j]
[i.i = 1] ov
= [[ −387.99i].[cos50i] + [1164.78j].[ − cos 40j] = 1141.67Nm
Bu Mov vektörel olarak ifadesi M ov = M ov . u cv = 1141 .67 . [cos 50i − cos 40 j] = 733.85i − 874.57 j
60
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.10. Şekilde verilen sistem iki kuvvet çiftine maruz kalmış bulunmaktadır.
c. Bu kuvvet çiftleri yerine sisteme aynı dış etkiyi verecek momentin [M] şiddeti ve
yönünün
d. Verilen dört kuvvetin yerini tutacak y-z düzlemlerine paralel iki +F ve –F kuvvetlerinin
hesaplanması.
30 kN
60o
30 kN
30 kN
60 mm
60o
60o
40 mm
100 mm
y
M2=2.5 Nm
y
x
θ
M=2.23 Nm
25 kN
50 mm
y
60
25 kN
M1=1.8 Nm
z
z
ÇÖZÜM:
o
30 kN’luk kuvvetlerin momentleri M1=30 (0.06)=1.80 Nm
25 kN’luk kuvvetlerin momentleri M2=25 (0.10)=2.50 Nm
Kosinüs teoremi M = M12 + M 22 − 2M1M 2 cos α M = 1.802 + 2.502 − 2(1.80)(2.50)cos60o = 2.23Nm
y−z
VEYA
30N → Mz = [ 30cos60 ]0.06 = 0.90Nm
30N → My = [ 30sin60 ]x0.06 =1.559Nm
25N →
Mz =−25x0.10 =−2.50Nm
Myz = M2z + M2y = 0.9 2z +1.559 2z =1.80Nm
∑Mz = 0.90 − 2.50 = −1.60Nm
Birleşke moment M = 1.60 2 + 1.559 2 = 2.23 Nm
y
-F
x
M2=2.5 Nm
θ
θ
+F
M=2.23 Nm
y
My=1.600 Nm
o
My=30 sin60 [0.06]=1.559 Nm
M = 1.5592 + 1.600 2 = 2.23Nm
z
60
z
o
My=1.559 Nm
M1=1.8 Nm
o
Mz= - 2.5+30 cos60 [0.06]=-1.600 Nm
M = F.d
F=
M 2.23
=
= 22.30N
d 0.10
61
θ = tan−1
1.559
= 44.15o
1.600
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.11. Şekilde kuvvet çiftlerine maruz plakada oluşan bileşke momentin hesaplanması.
20 kN’luk kuvvetlerin çifti momentleri M1=[20j N] x [3i m]
=-60k Nm
40 kN’luk kuvvetlerin çifti momentleri M2=[40i N] x [8k m]
=-320j Nm
80 kN’luk kuvvetlerin çifti momentleri M3=[80k cos60 N].[6i m] =240j Nm
80 kN’luk kuvvetlerin çifti momentleri M3=[80 sin60 N].[0m]
Birleşke moment
M = [240 j − 320 j ] + 60 k = −80 j − 60 k
=0
M = 80 2 + 60 2 = 100 Nm
ÖRNEK 2.12. Şekildeki gibi kuvvet çiftlerine maruz sistemde F kuvvetleri arasındaki dik mesafenin [d]
momentten yararlanarak bulunması.[ F=-20i+20j+10k [N]]
y
y
F
F
B
r
B[4,1,1]
B[4,1,1]
x
A
r
A
z
z
F=-20i+20j+10k [N]
Yer vektörü r=4i+1j+1k
M = F.d
x
d
[
[
F
j k
i
M = r xF = 4
1 1 = −10 i − 60 j + 100 k [N]
− 20 20 10
Moment
]
]
0. 5
M M
10 2 + 60 2 + 100 2
d=
= 3.90 m
=
=
0. 5
F
F
20 2 + 20 2 + 10 2
62
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.13. A, B ve D noktalarına uygulanan kuvvetlerden dolayı oluşan momentin hesabı [Mov=?]
z
z
z
v
F3=400 N
50
o
F1=600 N
D
A
60
B
B
100
C
4
o
6
50
2
F2=200 N
m
50
A
o
C
y
120
x
x
rCB
rCA
o
y
m
B
o
z
m
rCD
A
y
x
50
o
6
m
4
m
3.46
m
y
2
m
o
x
F1 = 600[cos 100i + cos 60 j + cos 50k ] = [ −104 .19i + 300 .00 j + 385 .69k ]
Çözüm:
F2 = 200[cos 120i + cos 50 j + cos 50k ] = [ −100 .00i + 128 .56 j + 128 .56k ]
F3 = 400 j
r CB = [2i + 3.46j + 6k]
r AC = [2i + 6k]
F1 x r CB
r CD = [6k]
F2 x r AC
F3 x r CD
k i
j
k i j
k
Mo = 2
3.46
6 + 2
0
6
6
+0 0
−104.19 300 385.67 −100 128.56 128.56 0 400 0
i
j
Mo = −3636.94i − 2253.60j + 1217.62k
uCV = cos 50j + cos 40k
MOV = Mo .uCV = [−3636.94i − 2253.60j + 1217.62k]. [cos 50 j + cos 40k ] = −515.83Nm
Vektörel olarak
−515.83[cos50j + cos 40k] = −[331.56i + 395.14j]
ÖRNEK 2.14. Şekildeki rijit direğin A ucuna T=200 kN’luk bir kuvvet taşıyan kablo B ucuna
mesnetleşmiştir. Buna göre T kuvvetinin direğin O noktasından geçen z eksenindeki momentin [Mz]
hesabı. [3 değişik yöntem ile]
y
A
10
m
O
T
[1. yöntem]
x
z
8
6
m
B
63
m
BÖLÜM I
VEKTÖRLER
AC = 10 2 + 8 2 = 12.81m
OB = 6 2 + 8 2 = 10 m
AB = 10 2 + 10 2 = 14.14 m
y
−1 12.81
A
α = cos
= 25
14.14
o
cos α = 0.906
Tx
Tz
Ty
Txy = T x 0.906 = 200 x 0.906 = 181.20 kN
β
Txy
α
8
d = 10 cos β
= 6.245m
AC
T
O
Mz = 181.20 x 6.25 = 1131.60kNm
C
x
z
8
VEYA [2. yöntem]
6
m
m
B
T kuvveti bileşenlerine ayrılır ve z eksenine dik gelen bileşimin momenti alınır.
A ve B noktalarının koordinatları(x,y,z) A(0,10,0) B(8,0,6)
Yer vektörü rAB = (8i + 10 j + 6k ) m
u AB =
r = 8 2 + 10 2 + 6 2 = 14.14 m
rAB
8
10
6
i+
j+
k
=
rAB 14.14 14.14
14.14
[
]
10
6
8
T = T u AB = 200
i+
j+
k = 113.15i + 141.44 j + 84.86k kN
14.14
14.14 14.14
Buna göre Mz momenti Tx bileşeninin y mesafesi ile çarpımına eşittir.
Tx = 113.15 kN
M z = 113.15 x 10 = 1131 .50 kNm
y
[3. yöntem]
A
Mo = r xF = r x 113.15i +141.44 j + 84.86k kN
Mo =10 jx 113.15i +141.44 j + 84.86k kN
vektörel
Mo = 1131.5k + 0 + 848.6i kNm
10
MZ
r
Mo
O
Yukarıda özellik 1’kullanılarak
M z = Mo . k =
m
T
[ [1131.5k + 0 + 848.6i ]. k ] kNm
x
z
M z = 1131 .5 kNm
8
m
6
m
B
ÖRNEK 2.15. Şekildeki 6x8 m lik ve ağırlığı 800 N olan plaka kablolarla ve E noktasındaki mesnetle
dengede bulunmaktadır. Buna göre kablo kuvvetlerinin ve E mesnedinin tepki kuvvetlerinin
bulunması.
64
BÖLÜM I
VEKTÖRLER
Çözüm: Serbest cisim diyagramı çizilir ve kablo kuvvetlerinin eksenler üzerindeki izleri yazılır.
r BA = (−8i + 4 j − 5k ) m
rBA = 8 2 + 4 2 + 5 2 = 10.25 m
Yer vektörü
r DC = (−8i + 9 j + 5k ) m rDC = 8 2 + 9 2 + 5 2 = 13.045 m
uBA =
rBA
−8
4
5
=
i+
j−
k
rBA
10.25
10.25
10.25
−8
4
5
T = TBA uBA = TBA
i+
j−
k = TBA −0.78i + 0.39j − 0.49k kN
10.25
10.25
10.25
uDC =
rDC
−8
9
5
=
i+
j+
k
rDC 13.04
13.04
13.04
−8
9
5
TDC = TDC uDC = TDC
i+
j+
k = TDC −0.61i + 0.69j + 0.38k kN
13.04
13.04
13.04
Şimdi sistemin dengede olması için kuvvetlerin toplamı eksenler üzerinde yazılır.
∑ Fx = 0
[E x − 0.78TBA − 0.61TDC ]i = 0
∑ Fy = 0
[E y + 0.39TBA + 0.69TDC − 800 ] j = 0
∑ Fz = 0
[E z − 0.49TBA + 0.38TDC + 800 ]k = 0
…..............................................................…….1
Denge için momentinde sıfır olması gereğinden E noktasında toplam moment yazılır.
∑ ME = ∑ [r x F] = 0
∑
E
xi
+E
yj
+E
zk
+ TBA + TDC − 800 j + 800k = 0
i
j
k
i
j
k
j
k
i
MB =
8
0
0
8
−6
0
0 =0
+
+ 4 − 3
− 0.78TBA 0.39TBA − 0.49TBA − 0.61TDC 0.69TDC 0.38TDC 0 − 800 800
65
BÖLÜM I
VEKTÖRLER
[ −2.28 TDC − 2400 ] i = 0
TDC = 1052 .63 N
[ −3.04 TDC + 3.92TBA − 3200 ] j = 0
TBA = 1632 .65 N
Bulunan kablo kuvvetleri 1 nolu denklemde yerine yazılarak E mesnet tepki kuvvetleri hesaplanır.
∑ Fx = 0
E x = 0.78TBA + 0.61TDC ]i = 1915 .57 N
∑ Fy = 0
E y = −0.39TBA − 0.69TDC + 800 ] j = 563 .05 N
∑ Fz = 0
E z = 0.49TBA − 0.38TDC − 800 ]k = −400 N
ÖRNEK 2.16. Şekilde verilen sistem A ve B noktalarında mafsallı olarak bağlanmıştır. Mesnet
kuvvetlerinin [AX AY BX BY BZ] ve kablo kuvvetinin [TCE] bulunması.
y
BY
BX
BZ
1
m
TCE
E
B
0.8
AY
6
AX
A
2
m
C
B
z
2
2
C
Serbest cisim
diyagramı B
m
6
m
m
2
m
x
D
400 N
m
m
TCE=[-2,0.8,1]
için
TCE nin bileşenleri
D
400 N
2
TCEX = TCE cos ϕ = TCE −
= −0.842TCE
2
2
2
2 + 1 + 0.8 +
0.8
TCEY = TCE cos ϕ = TCE
= 0.337TCE
2
2
2
2 + 1 + 0.8 +
1
TCEZ = TCE cos ϕ = TCE
= 0.421TCE
2
2
2
2 + 1 + 0.8 +
Serbest cisim diyagramında denge denklemleri aşağıdaki şekilde yazılır.
∑ Fx = 0
[ A x + B X − 0.842TCE ] = 0
∑ Fy = 0
[ A Y + B Y + 0.337TCE − 400 ] = 0
∑ Fz = 0
[ A Z + B Z + 0.421TCE ] = 0
1
66
BÖLÜM I
VEKTÖRLER
∑ MB = 0 = rCE xT + rA x A + rD xD = 0
rA = [2k] rCE = [2i] rD = [2i + 2k]
i
i
j
k
j
k i
j k
j
k i
2
0
0
+ 0 0 2 + 0 0 0 + 2 0 2=0
∑ MB =
−0.824T 0.337T 0.421T A A A B B B 0 − 400 0
X Y Z X Y Z
∑ M X = 0 = [ −2A Y + 800 ] i ⇒⇒ A Y = 400 N
∑ M Z = 0 = [2x0.337T − 800 ] k ⇒⇒ T = 1187 N
∑ M Y = 0 = [2 A X − 0.842T ] j ⇒⇒ A X = 500 N
1 nolu denklemden BX, BY ve BZ aşağıdaki şekilde bulunur.
∑ Fx = 0
[ A x + B X − 0.842TCE ] = 0
⇒⇒ B X = 500 N
∑ Fy = 0
[ A Y + B Y + 0.337TCE − 400 ] = 0
∑ Fz = 0
[ A Z + B Z + 0.421TCE ] = 0
⇒⇒ B Y = −400 N
1
⇒⇒ B Z = −500 N
rB = [ −2k ]
rCE = [2i − 2k ]
rD = [2i]
VEYA [A] noktasına göre moment alınırsa
∑ MB = 0 = rCE xT + rA x A + rD xD = 0
i
j
k i
j
k i
j k
− 2 + 0 0 − 2 + 2 0 0 = 0
2
0
∑ MB =
− 0.824T 0.337T 0.421T B X B Y 0 0 − 400 0
∑ M X = 0 = [2x0.337T + 2B y ] i
⇒⇒ B Y = −400 N
∑ M Z = 0 = [2x0.337T − 800 ] k
⇒⇒ T = 1187 N
aynı sonuçlar
∑ M Y = 0 = [2x[0.421 − 0.842 ]T + 2B X ] j ⇒⇒ B X = 500 N
1 nolu denklemden AX ve AY bulunur.
ÖRNEK 2.17. Şekildeki rijit AB çubuğu A noktasında mafsallı ve C noktasına kablo ile bağlanmış
bulunmaktadır. Buna göre kablo kuvvetinin [T] bulunması.
C
1000 N
kablo
B
A
Rijit çubuk
2m
2m
200 N
m
3
400 N
67
4
4
BÖLÜM I
VEKTÖRLER
Sistemin serbest cisim diyagramı aşağıda gösterilmiştir.
T
Serbest cisim diyagramı
707 N
707 N
Rijit çubuk
AX
m
m
2
2
AY
200 N
B
m
3
400 N
Serbest cisim diyagramı üzerinde ΣFX=0, ΣFY=0 ve ΣM=0 yazılır.
∑ Fx
Buna göre
=0
∑ FY = 0
A x + 707 = 0
A x = −707N ⇐
A Y + T − 200 − 400 + 707 = 0
A Y + T = −107N
∑ MA = 0
1
707 x 7 + T x 4 − 200 x 2 − 400 x 4 = 0
T = −737.25 N ⇓
1 bağıntısında T yerine yazılarak Ay mesnet tepkisi bulunur.
A Y + T = −107N
T = −737.25N ise A Y = 630.25N
ÖRNEK 2.18. Şekilde yükleri ile verilen rijit çubuk A ve B kabloları ile dengede durmaktadır.
Buna göre kablo kuvvetlerinin [ TA=? TB=? ] bulunması.
B
kablo
4
A
4
kablo
2
C
4
1000 N
Rijit çubuk
m
m
m
3
6
3
800 N
300 N
68
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.19. Şekilde verilen sistemde kablo kuvvetlerinin hesaplanması
B
A
o
o
TAC
60
38
TACcos38
TBC
TBCsin60
TACsin38
TBCcos60
60o
38o
C
C
200 kN
∑ Fx = 0
∑ Fy = 0
TBC cos 60 − TAC cos 38 = 0
TBC sin 60 + TAC sin 38 = 200
200 kN
Bu iki denklemin ortak çözümü sonucu
∑Fx = 0
C
−1.732[ TBC cos60 − TAC cos38 ] = 0
[ − TBC sin60 +1.732 TAC cos38] = 0
TBC sin60 + TAC sin38 = 200
∑Fy = 0
TAC=101 kN
TBC
TBC=159.15 kN olarak bulunur.
30o
98o
52o
Diğer bir çözüm yöntemi olarak da sinüs teoremi kullanılarak aşağıda hesaplanmıştır.
200 kN
TAC
sin 30 sin 52 sin 98
=
=
TAC
TBC
200
TBC = 159.15 kN
TAC = 100.98 kN olarak bulunur.
ÖRNEK 2.20. Kaynakla yapılmış boru çerçeve A noktasında x-y düzlemine küresel mafsalla bağlanmıştır. B noktasında da
eksenel serbestliği olan bir halka ile desteklenmektedir. 3 kN’luk kuvvetin etkisiyle çerçevenin AB ekseni etrafında dönme
yapmaması için CD kablosu kullanılmıştır. Bu haliyle çerçeve dengededir ve çerçevenin kendi ağırlığı ihmal edilmiştir. Buna
göre T kablo ve A ve B mesnet tepki kuvvetlerinin hesabı yapılacaktır.
z
3m
C
z
z
3m
C
3m
C
T
3m
m
3
m
3
5m
m
6
B
B
3kN
6
r2
B
Bz
3kN
3kN
η1
m
Bx
5m
5m
m
6
Ax
3m
A
A
D
1m
22 + 3 2 + 62
D
D
1
CD = 2 2 + 3 2 + 6 2 = 7 m
x
η1 =
[5j + 6k]
52 + 6 2
r2 = 3i + 6k m
1
F = 3 j kN
= 0.64j + 0.77k
vektörel
∑ MAB = 0
Ay
Az
m
y
y
r1 = −i + 3 j m
3m
A
x
y
T[2i + 3j − 6k]
3m
m
x
T=
r1
T[2i + 3j − 6k]
[ −i + 3j] x
.[0.64j + 0.77k] + 3i + 6k] x [3 j] .[0.64j + 0.77k] = 0
7
vektörel
69
BÖLÜM I
VEKTÖRLER
MAB
i
= [r 1 x T] + [r 2 x F] = T − 1
2 / 7
3kNnun A noktasına
j
k
3
0 .[0.64j + 0.77k] + [3i + 6k] x [3j] .[0.64j + 0.77k] = 0
3 / 7 − 6 / 7
(
)
TkablokuvvetininDnoktasına
Veya MAB = T [ −2.57i + 0.857j − 1.286k] .[0.64j + 0.77k] + ([9k − 18i] ) .[0.64j + 0.77k]
Fden
MAB = T [ −1.539] + ( [6.93] ) = 0
→→ T = 6.93 /1.539 = 4.5
T den
Tx=1.286 kN Ty=1.928 kN Tz=-3.857 kN
∑ Mz = 0 = 3.[3] − 5B x − 1.928[3] = 0
B x = 0.643 kN
∑ Mx = 0 = −3.[6] + 5Bz − 1.928[6] = 0
Bz = 5.914 kN
∑ Fx = 0 = [A X + 0.643 + 1.286] = 0
A X = −1.929 kN
∑ Fy = 0 = [A y + 3 + 1.928] = 0
A y = −4.928 kN
∑ Fz = 0 = [A z + 5.914 − 3.857] = 0
A z = −2.057kN
ÖRNEK 2.21. 6 m’lik AC kolonuna CF yönünde 455 kN’luk bir kuvvet şekildeki gibi etkimektedir. Kolon
A noktasına küresel mafsal [Ax Ay Az] D [TBD] ve E noktalarına [TBE] kablo ile mesnetlenmiş
bulunmaktadır. Buna göre A noktasındaki mesnet tepki kuvvetleri ile [TBD] ve [TBE] kablo kuvvetlerinin
bulunması.
y
y
C
455 kN
A
z
1.5m
455 kN
B
TBE
1.5m
D
2m
TBD
Az A
z
x
Uygulanan ve
mesnet tepki
kuvvetlerini
gösteren serbest
cisim diyagramı
3m
2m
F
3m
3m
3m
m
3
3m
B
F
3m
C
3m
1.5m
D
ηAD m
3
Ay A
x
ηAE
E
E
FCF = FCF
rCF
−3 i − 6 j + 2k
= 455
= 65[−3 i − 6 j + 2k] = −195 i − 390 j + 130k
rCF
32 + 62 + 22
TBE = TBE
rBE
1.5 i − 3 j + 3k
= TBE
= [0.33 i − 0.67 j + 0.67k]TBE
rBE
1.52 + 32 + 32
rBD
1.5 i − 3 j − 3k
= TBD
= [0.33 i − 0.67 j − 0.67k] TBD
rBD
1.52 + 32 + 32
Moment alınarak kablo kuvvetleri aşağıdaki şekilde hesaplanır.
TBD = TBD
rAC = 6 j
η AE =
rAE
1.5 i + 3k
=
= 0.448 i + 0.896k
rAE
1.5 2 + 3 2
η AD =
rDE
1.5 i − 3k
=
= 0.448 i − 0.896k
rAD
1.5 2 + 3 2
rAB = 3 j
70
BÖLÜM I
VEKTÖRLER
{[
] [
]}
M AE = rAC x FCF + rAB x TBD η AE = 0
M AE
i
j
k i
j
k
=
0
6
0 + 0
3
0 TBD 0.448 i + 0.896k = 0
− 195 − 390 130 0.33 − 0.67 − 0.67
[
]
{[780 i + 1170k ] + [− 2.01i − 0.99k ]T } [0.448 i + 0.896k ] = 0
BD
{[780 − 2.01T
BD
{[
]i + [1170 − 0.99TBD ]k } [0.448 i + 0.896k ] = 0
] [
TBD = 782 N
]}
M AD = rAC x FCF + rAB x TBE η AD = 0
i
j
k i
j
k
M AD =
0
6
0 + 0
3
0 TBE 0.448 i − 0.896k = 0
− 135 − 390 130 0.33 − 0.67 0.67
[
]
{[780 i + 1170k ] + [− 2.01i − 0.99k ]T } [ 0.448 i − 0.896k ] = 0
BE
{[780 − 2.01T
BE
]i + [1170 − 0.99TBE ] k }[0.448 i − 0.896k ] = 0
TBE = 391 N
TBD = 782 [0.33 i − 0.67 j − 0.67k ] = 257.40 i − 522.60 j − 522.60k ]
Vektörel olarak [ TBD ve TBE]
TBE = 391[0.33 i − 0.67 j + 0.67k ] = 128.70 i − 261.30 j + 261.30k ]
∑F
=0
∑F
=0
∑F
=0
x
y
z
A = A x + A y + A z
A y − 390 − 522.60 − 261.30 = 0 →→ A y = 1173 .90 NN
A = 188 i + 1173 .30 j − 131 .30k
− A z − 522.60 + 130 + 261.30 = 0 →→ A z = −131.30
− A x − 195 + 257.40 + 125.70 = 0 →→ A x = 188.00 N
Uygulama: A küresel mesnet kuvvetlerini (Ax, Ay ve Az)), TC ve TD kablo kuvvetlerini hesaplayınız.
z
z
6m
6m
Az
A
6m
B
F=30 kN
B
F=30 kN
6m
Ax
D
Ay
3m
Serbest cisim diyagramı
C
y
x
x
71
y
BÖLÜM I
VEKTÖRLER
KUVVETLERİN VEKTÖREL ANALİZİ
F = −30j
T C = TC
rBC
6i − 6k
= TC
= 0.707TC i − 0.707TC k
rBC
62 + 6 2
TD = TD
rBD
−3i + 6j − 6k
= TD
= −0.333TD i + 0.667TD j − 0.667TD k
rBD
3 2 + 62 + 62
X eksenine göre moment alındığı için TC kablosu herhangi bir moment oluşturmaz.
i
j
k
i
i
M
=
0
M
=
M
i
i
=
[
(r
xF)
+
(r
xT
)]
i
=
0
0
6
+
0
AB
AB
A
∑ X
D
X
0 −30 0 −0.333TD
∑ MAD = MA iuAD = [(r AB xF) + (r AC xTC )]uAD
i
j
k i
= 0 0 6 + 6
0 −30 0 0.707TC
uAD =
−3i + 6j
32 + 62
j
0
0.667TD
k
[[180 − 6i0.667TD ]i + [6i0.333TD ]j]ii = 0
6
i =
−0.667TD TD = 44.98 kN
= −0.447i + 0.895j
[ [180i( −0.447)i] + [( −6i0.707T )i0.895]j = 0
j
k
C
7i
+
0.895j]
i
[
−
0.447i
+
0.895j]
[180i
−
6
i
0.707
T
j
]
i
[
−
0.4
4
80.46
−
3.80T
=
0
0
0
=
C
C
0 −0.707TC
T
21.
=
17
kN
C
Bulunan kablo kuvvetlerinin eksenlerdeki bileşenleri,
TD = TD
rBD
−3i + 6j − 6k
= 44.98
= −15i + 30j − 30k
rBD
32 + 62 + 62
T C = TC
rBC
6i − 6k
= 21.17
= 15i − 15k
rBC
62 + 62
F = −30j
A x = 15 − 15 = 0
FA = A x i + A y j + A z k A y = 30 − 30 = 0
A z = −15 − 30 = −45 kN
ÖRNEK 2.22. Şekildeki sistem A ve E noktalarında küresel mafsal ve F noktasında kablo ile
mesnetleşmiştir. Buna göre kablo kuvvetinin [T=?] hesaplanması.
F = −60 j
rEC = 16 i − 14k
MEA = ME . ηEA = {[rEC x 60 ] + [rED x T ]}ηEA = 0
rED = 16 i
T=T
−16 i + 11j − 8k
rDF
= T.
= −0.762 i + 0.527 j − 0.381k T
rDF
162 + 112 + 82
72
BÖLÜM I
VEKTÖRLER
ηEA =
7 i − 24 k
rEA
=
= 0.28 i − 0.96 k
rEA
7 2 + 24 2
[
]
MEA = ME . ηEA = {[ rEC x 60 ] + [rED x T ]}ηEA = 0
i
j
k
i
j
k
MAE = 16
0 − 14 +
16
0
0 0.28 i − 0.96k = 0
0 − 60 0 −0.762T 0.542T − 0.381T
{ −840 − 960 + 8.672T + 6.096T } 0.28 − 0.96 = 0
i
k
k
j
i
k
T = 82.50N
ÖRNEK 2.23. Şekilde verilen sistemde O noktasına bir kuvvetle bir kuvvet çifti uygulanabiliyor. Bu
kuvvet çiftini moment [M] olarak belirlenmesi.
F1 = 600[cos 100i + cos 60 j + cos 50k ] = [ −104 .19i + 300 .00 j + 385 .69k ]
r OA = [250 j + 200k ]
r = 200 2 + 250 2 = 320 .16 mm
M = F. r = 104.19 2 + 300 2 + 385 .69 2 0.200 2 + 0.250 2 = 159 .88 Nm
i
Mo = 0
− 104.19
j
0.25
300
k
0.20 = [156 .42i + 20.84 j + 26.05k ] N m
385 .69
M = F. r = 156.42 2 + 26.05 2 + 20.84 2 = 159.94 Nm
73
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.24. Şekilde verilen kuvvetler sisteminde bileşke kuvveti ve yönünün bulunması.
y
[3,2,0]
F2=400 N
[0,2,2]
x
[0,2,4]
[5,2,4]
F3=800 N
[2,0,2]
F1=600 N
[2,0,4]
z
cosα
αx
F
600
400
800
[0 − 2]
22 + 22 + 22
[3 − 0]
32 + 0 2 + 42
[5 − 2]
32 + 22 + 22
cosα
αy
= −0.58
[2 − 0]
12
= 0.6
= 0.73
cosα
αz
= 0.58
0
[2 − 0]
17
= 0.49
[2 − 4 ]
12
[0 − 4 ]
Fx [N]
25
[ 4 − 2]
17
= − 0 .8
Fx2=0.6x400=240
= 0.49
Fx3=0.73x800=584
BİRLEŞKE KUVVET
477.49
o
α x = cos −1
= 58.8
921.17
Fz [N]
= −0.58 Fx1=-0.58x600=-346.4 Fy1=346.41 Fz1=-346.41
TOPLAM
AÇI
Fy [N]
Fx=477.49
R=
Fy2=0
Fz2=-320
Fy3=392 Fz3=392
Fy=738.41
Fz=-274.41
477.492 + 738.412 + 274.412 = 921.17 N
738 .41
o
α y = cos −1
= 36.7
921.17
274.41
o
α z = cos −1 −
= 107.3
921 .17
Kuvvetlerin merkeze taşınması kuvvet çiftleri ile değil bileşkeleri ile taşınmıştır. Kuvvet çiftlerinin yerini
ve büyüklüğünü bulmak için her üç kuvvetin momenti bulunur. Örnek olarak F1 kuvvetinin momenti
hesaplanmıştır. Bir kuvvetin Fx bileşeni Mx momenti oluşturmaz bu durum diğer eksenler içinde
geçerlidir.
R=921.17
Fy=738.41
y
M x1 = Fy1 x 4 = −346.41x 4 = −1385.64 tm
αy=36.7o
αz=107.3o
M z1 = Fy1 x 2 = 346.41x 2 = 692.82 tm
Fy=738.41
x
Fx=477.49 N
z
M y1 = −Fx1 x 4 + Fz1 x 2 = −346.41x 4 + 346.41x 2 = −692.82 tm
74
αx=58.8o
BÖLÜM I
VEKTÖRLER
y
C=3051.52
∑My=651.18
αy=36.7o
αx=23o
x
∑Mx=-2809.64
αz=71o
∑Mz=996.82
z
F
Fx [N]
Fy [N]
600 Fx1=-346.4
400 Fx2=240
800 Fx3=584
Fy1=346.41
Fy2=0
Fy3=392
Fz [N]
Fz1=-346.41
Fz2=-320
Fz3=392
TOPLAM
Mx [N]
My [N]
-1385.64
-640
-784
-2809.64
-692.82
960
384
651.18
Mz [N]
692.82
-480
784
996.82
C = [ ∑ Mx ]2 +[ ∑ Mxy ]2 +[ ∑ Mz ]2 = 2809.642 + 651.182 + 996.822 = 3051.52Nm
− 2809 .64
o
α x = cos − 1
= 157
3051
.
52
651.18
o
α y = cos −1
= 78
3051
.
52
996 .82
o
α z = cos −1
= 71
3051
.
52
Vektörel çarpım ile momentlerin hesaplanması aşağıda yapılmıştır.
i
j
k
F1 = 600 N ⇒ M1 =
2
0
4 = −1385 .64i − 692 .82 j + 692 .82k
− 346 .41
346.41
− 346 .41
j
k
j
k
i
i
M2 = 0 2
4
= −640i + 940 j − 480k M 2 = 2
0
2
= −784i + 384 j + 784k
240 0 − 320
584 392 392
F = 400
F = 800
ÖRNEK 2.25. Kendi ağırlığı 9 N/m olan EF kirişi F ucunda 150 N yük taşımaktadır.
1. FAB=?
2. Ex=? Ey=? Ez=? [E noktası mafsallı mesnet]
B
rBA = (−4 − 0)i + (4 − 0) j + (0 − 7)k = (−4i + 4 j − 7k ) m
y
G
m
4
4m
rBA = 4 + 4 + 7 = 9 m
2
A = AuBA = A
2
2
E
x
4m
rBA
= A − 4 i + 4 j − 7 k = −0.444 A i + 0.444 A j − 0.778 A k
9 9 9
rBA
A
F
ÖZET:
m
3
2m
z
F noktasında − 150 j
150 N
EF ortasında − 9x9 = −81j
E noktasında bu kuvvetlerin oluşturduğu
momentlerin toplamı sıfır olmalıdır.
E noktasında E x i + E y j + E z k
A noktasında − 0.444 Ai + 0.444 A j − 0.778 Ak
75
BÖLÜM I
VEKTÖRLER
i
j
k
j k i
j
k i j k
i
0
=0
0 9 + 0 0 4.5 + 0 0 0 +
0
0
7
0 − 150 0 0 − 81 0 E x E y E z − 0.444 A 0.444 A − 0.778 A
9.[150 ]i + 4.5[81]i + 7[ −0.444 A ]i = 0
∑i = 0
9.[150]i + 4.5[81]i + 7[ −0.444 A ]i = 0 ⇒⇒ A = 551.64 N
A = −0.444[551.64]i + 0.444[551.64]j − 0.778[551.64]k = −244.93i + 244.93j − 429.18k
E mesnet reaksiyonlarını bulmak için kabloların x, y ve z bileşenleri veya,
∑ Fx = 0
E x − 244.93 = 0
⇒ E x = 244.93 kN
∑ Fy = 0
E y − 81 − 150 + 244.93 = 0
⇒ E y = 13.93 kN
∑ Fz = 0
E z − 429.18 = 0
⇒ E z = 429.18 kN
ÖRNEK 2.26. Kendi ağırlığı 9 N/m olan EF kirişi F ucunda 150 N yük taşımaktadır. CD kablo kuvveti
FCD=200 N olduğuna göre; [E noktası küresel mafsallı mesnet]
1. FAB=? FGF=?
2. Ex=?
Ey=? Ez=?
y
A
G
4m
4m
4m
C
m
E
3
x
m
4
3m
F
2m
z
150 N
rBA = (−4 − 0)i + (4 − 0) j + (0 − 7)k = (−4i + 4 j − 7k ) m
rBA = 4 2 + 4 2 + 7 2 = 9 m
A = AuBA = A
rBA
= A − 4 i + 4 j − 7 k = −0.444 A i + 0.444 A j − 0.778 A k
9 9 9
rBA
rFG = (0 − 0)i + (4 − 0) j + (0 − 9)k = (4 j − 9k ) m
G = G uFG = A
rBA = 4 2 + 9 2 = 97 m
rFG
4
9
= G
j−
k = 0.406G j − 0.914Gk
rFG
97
97
rDC = (4 − 0)i + (3 − 0) j + (0 − 4)k = (4i + 3 j − 4k ) m
76
rDC = 4 2 + 3 2 + 4 2 = 6.403 m
BÖLÜM I
C = CuCD = C
VEKTÖRLER
rCD
3
4
4
= 200
i+
j−
k = −124.94i + 93.70j − 124.94k
rCD
6.403
6.403
6.403
ÖZET:
F noktasında − 150 j
EF ortasında − 9 x 9 = −81j
E noktasında E x i + E y j + E z k
E noktasında bu kuvvetlerin oluşturduğu
momentlerin toplamı sıfır olması
gereğinden dolayı aşağıda tüm kuvvetlerin
momenti alınarak sıfıra eşitlenir.
A noktasında − 0.444 Ai + 0.444 A j − 0.778 Ak
G noktasında 0.406G j − 0.914 Gk
C noktasında − 124 .94i + 93.70 j − 124 .94k
k
i
j
k
0 +
0
0
7
E x E x −0.444 A 0.444 A −0.778 A j değerlerinin toplamı = 0
( i ler toplanmadı çünkü orada 2 bilinmeyen var)
+ 4.5 [ 81] i
+0
+ 7 [ −0.444 A ]i − 7 [ 0.444 A ] j
9.[150 ]i
∑ j = 0
j
k
j
k
i
i
7[ −0.444 A ] j + 4[124.94 ] j = 0
+ 0
0
9
0
4 =0
+ 0
⇒⇒ A =160.80N
0 0.406 G −0.914 G 124.94 93.70 −124.94
−9[ 0.406 G ]i
− 4[ 93.7 ]i + 4 [124.94 ] j = 0
j
k i
j
k i
i
0
+ 0 0 4.5 + 0
0
9
0 −150 0 0 −81 0 E x
j
0
A bulunduktan sonra aşağıdaki şekilde i’ler toplamından G değeri bulunur.
i = 0 9.[150]i + 4.5[81]i − 7[0.444A]i − 9[0.406G]i − 4[93.7]i = 0 ve A = 160.80N ise
∑
G = 229.87N
A ve G değerleri bulunduktan sonara birleşenleri aşağıdaki şekilde hesaplanır.
A = −0.444[160.8]i + 0.444[160.8] j − 0.778[160.8 ]k = −71.40i + 71i40 j − 125.10k
G = 0.406[229.87] j − 0.914[229.87]k = 93.33 j − 210.10k
E mesnet reaksiyonlarını bulmak için kabloların x, y ve z eksenlerinde denge yazılır.
∑ Fx = 0
E x − 71.40 + 124.94 = 0
⇒ E x = −53.54 kN
∑ Fy = 0
E y − 81 − 150 + 71.40 + 93.33 + 93.70 = 0 ⇒ E y = −27.43 kN
∑ Fz = 0
E z − 125.10 − 210.10 − 124.94 = 0
77
⇒ E z = 460.14 kN
BÖLÜM I
VEKTÖRLER
ÖRNEK 2.27. Şekilde verilen sistemin dengede olması için bileşke kuvvetin [R] şiddetinin ve
uygulama noktasının [x,y,z] hesaplanması.
y
y
400N
3.78
R=370 N
m
D
D
1.23
150N
m
120N
280N
E
4
200N
m
z
A
6
6
m
C
C
orta
B
80N
5
E
x
m
x
z
m
4.5
m
B
Yer vektörü [r] adı
Yer vektörü [r] değeri
F [N]
rE
rD
rC
rB
rA
rorta
9.5k
0
10i
10i+5k
4i+9.5k
5i+4.75k
150j
-400j
-120j
-80j
-200j
280j
R =-370j
MRD = r x F
i
-1425
0
0
400
1900
-1330
-455
j
0
0
0
0
0
0
0
k
0
0
-1200
-800
-800
1400
-1400
M RD = r xF = [ −455i −1400k ] = [ rxi + ryj + rzk ]xR = [ rxi + ryj + rzk ]x[ −370 j ]
[ −455i −1400k ] = −370 xk ( ixj ) + 0 jxj=0 + 370 zi ( kxj=− i )
x=
1400k
= 3.78m
370 xk
z=−
455i
= −1.23m
370 zi
Uygulama: Duvarı dik tutmak için şekilde görülen BC desteği kullanılmaktadır. Duvara uygulanan
kuvvet çifti sistemi şekilde görüldüğü gibidir. Bu kuvvet çifti sistemini A noktasına uygulanacak eşdeğer
bir kuvvet çifti sistemiyle değiştiriniz. MA=?
( R = 21.2 kN ve
M = 13.25 kNm )
Çözüm: Kuvvetin ve momentin eksenlerdeki bileşenleri bulunarak A noktasına göre momenti alınır.
78
BÖLÜM I
VEKTÖRLER
Kuvvet analizi R = R ⋅ rBC = 21.2
Moment analizi M = −rBCM =
( 42cm ) i − ( 96 cm ) j − (16 cm ) k
[422 + 962 + 162 ]0.5
−42i + 96j + 16k
(13.25 kNm ) = − ( 5.25kNm ) i + (12kNm) j + ( 2 kNm ) k
106
Yer vektörü rCA = ( 42 cm ) i + ( 48 cm ) k =
i
MA = rCA × R + M = 0.42
8.40
= ( 8.40kN) i − (19.20kN) j − ( 3.20kN) k
j
0
−19.20
1
( 42i + 48k ) m = ( 0.42m ) i + ( 0.48m ) k
100
k
moment
0.48 + ( −5.25i + 12j + 2k ) kNm = ( 3.97i + 6.62j − 6.06k ) kNm
−3.20
Uygulama: Soru: 3 kişi 5x5m ‘lik bir salın üzerinde durmaktadır. A, B ve C noktasında duran
çocukların ağırlıkları sırasıyla 500 N, 600N ve 700N ise üç ağırlığın bileşkesinin büyüklüğünü ve
uygulama noktasını bulunuz.
∑F :
∑M
x
FA + FB + FC = R
:
R = −500j − 600j − 700j = −1800j (N)
FA ( z A ) + FB ( zB ) + FC ( zC ) = R ( zD )
( 500N)( 3m ) + ( 600N)( 0.5m ) + ( 700N)( 4.75m ) = (1800N)( zD )
zD = 2.847 m
∑M
z
:
FA ( x A ) + FB ( xB ) + FC ( x C ) = R ( xD )
( 500N)(1m ) + ( 600N)(1.5m ) + ( 700N)( 4.75m ) = (1800N)( xD )
xD = 2.625 m
VEYA
j
k i
j
k i
j
k i
i
Mo = 1
0
3 + 1.5
0
0.5 + 4.75
0
4.75 = xD
0 −500 0 0 −600 0 0
−700
0 0
3 ⋅ 500 i
0.5 ⋅ 600 i
4.75 ⋅ 700 i
−1⋅ 500 k
−1.5 ⋅ 600 k
−4.75 ⋅ 700 k =
79
=
j
k
yD
zD
∑ −1800 0
zD ⋅ 1800 i
− xD ⋅ 1800 k
ise zD = 2.847 m
ise
xD = 2.625 m
BÖLÜM I
VEKTÖRLER
Uygulama: A noktasındaki kuvvet ve momentlerin bulunması
800 N
500 N
ÇÖZÜM: Kuvvet ve momentin ayrı ayrı eksenlerdeki bileşenleri bulunur:
FD = 500 ⋅ ( − cos35j − sin35k) = ( −409.58j − 286.79k )N
j
k
j
k
i
i
−0.12
MA = rDA x FD + rCA x FC = 0.18
0.10 + 0.20 −0.12 0 = (75.37i + 51.62j − 233.72k ) Nm
0
−409.58 −286.79 0
−800 0
Kuvvetlerin kendileri
F = ( −409.58j − 1086.79k )N
A noktasındaki kuvvetler A
MA = (75.37i + 51.62j − 233.72k) Nm Kuvvetlerden oluşan momentler
Uygulama 3: Verilen kuvvetler ve momentlerden oluşan sistemde R=? ve Mo=?
y
0,1 m
30 Nm
0,6 m
84 N
B
A
80 N
0,3 m
32 Nm
x
z
0,4 m
ÇÖZÜM: Verilen kuvvetlerin bileşkesi bulunur.
∑ F : R = −84j − 80k
R = (842 + 802 )0.5 = 116 N
Kuvvet ve momentlerin orijine göre momentleri aşağıdaki şekilde hesaplanır.
MR0
j
k
j
k
i
i
momentler
= (r0 xF) + MC = 0.6 0 0.1
+ 0.6 0 0.1
+ ( −30j − 32k) = ( −15,6i − 2j − 82,4k ) Nm
0 84 0
0 84 0
84 N
80 N
80
BÖLÜM I
VEKTÖRLER
Uygulama: Şekilde verilen kuvvetler ve momentlerden oluşan sistemde bileşke (denk) kuvvet R’yi
bulunuz. Bileşke kuvvet yz düzlemini hangi noktada kesmektedir hesap ediniz.
14 Nm
y
60 mm
C
A
40 mm
50 N
120 mm
10 Nm
60 mm
70 N
D
120 mm
160 mm
z
B
x
40 mm
Çözüm: Öncelikle, verilen kuvvet sistemi orijinde kuvvet çiftine dönüştürülür.
∑ F : FA + FD = R
Kuvvet
R = (20i + 30j − 10k)N
40i + 600j − 120k
R = 50k + 70
402 + 602 + 1202
N
R = (202 + 302 + 102 )0.5 = 37,42 N
∑ M0 : ∑ (r0 xF) + ∑ MC = M0R
160i − 120j
Moment ∑ M0R = 0,12j × 50k + 0,16i × (20i + 30j − 60k) + 10.
1602 + 1202
R
M0 = (18i − 8,4j + 10,8k ) Nm
40i − 120j + 60k
+ 14.
402 + 1202 + 602
Orijindeki kuvvetleri ve kuvvet çiftlerini tek bir bileşke kuvvete dönüştürebilmek için, R ve M birbirine
dik olmalıdır. Yani,
R ⋅ M = 0 (skaler çarpım)
(20i + 30j − 10k) • (18i − 8,4j + 10,8k) =? 0
(20).(18) + (30) • ( −8,4) + ( −10).(10,8) =? 0
0 =? 0
R ve M birbirlerine dik olduğuna göre bu sistem tek bir eşlenik kuvvete dönüştürülebilir.
y
R
y
R
z
P
=
y
x
z
x
z
M0
R
Eşitlik için: M0R = rp × R rp = yj + zk olmalıdır. Bilinenleri yerine yazarsak:
R
j
k i : 18 = −10y − 30z = −10 ⋅ 0.54 − 30 ⋅ 0.42 = 18
i
x = 0
18i − 8,4j + 10,8k = 0
y
z j : −8.4 = 20z
z = −0.42m
KESER
y = −0.54
20 30 −10 k : 10.8 = −20y
y = −0.54m
z = −0.42
81