KÜRESEL HĐPERBOLĐK VE de-SITTER DÜZLEMĐNDE
ÜÇGENLER
Ümit TOKEŞER
DOKTORA TEZĐ
MATEMATĐK
GAZĐ ÜNĐVERSĐTESĐ
FEN BĐLĐMLERĐ ENSTĐTÜSÜ
MAYIS 2013
ANKARA
Ümit TOKEŞER tarafından hazırlanan “KÜRESEL HĐPERBOLĐK VE de-SITTER
DÜZLEMĐNDE ÜÇGENLER” adlı bu tezin Doktora tezi olarak uygun olduğunu
onaylarım.
Prof. Dr. Baki KARLIĞA
…….…………………….
Tez Danışmanı, Matematik Anabilim Dalı
Bu çalışma, jürimiz tarafından oy birliği ile Matematik Anabilim Dalında Doktora
tezi olarak kabul edilmiştir.
Prof. Dr. Mustafa ÇALIŞKAN
…….…………………….
Matematik Anabilim Dalı, G.Ü.
Prof. Dr. Baki KARLIĞA
…….…………………….
Matematik Anabilim Dalı, G.Ü.
Prof. Dr. H. Hüseyin UĞURLU
…….…………………….
Matematik Eğitimi Anabilim Dalı, G.Ü.
Prof. Dr. Yusuf YAYLI
…….…………………….
Matematik Anabilim Dalı, A.Ü.
Doç. Dr. Nejat EKMEKCĐ
…….…………………….
Matematik Anabilim Dalı, A.Ü.
Tez Savunma Tarihi: 08/05/2013
Bu tez ile G.Ü. Fen Bilimleri Enstitüsü Yönetim Kurulu Doktora derecesini
onamıştır.
Prof. Dr. Şeref SAĞIROĞLU
Fen Bilimleri Enstitüsü Müdürü
…….…………………….
TEZ BĐLDĐRĐMĐ
Tez içindeki bütün bilgilerin etik davranış ve akademik kurallar çerçevesinde elde
edilerek sunulduğunu, ayrıca tez yazım kurallarına uygun olarak hazırlanan bu
çalışmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf
yapıldığını bildiririm.
Ümit TOKEŞER
iv
KÜRESEL HĐPERBOLĐK VE de-SITTER DÜZLEMĐNDE ÜÇGENLER
(Doktora Tezi)
Ümit TOKEŞER
GAZĐ ÜNĐVERSĐTESĐ
FEN BĐLĐMLERĐ ENSTĐTÜSÜ
Mayıs 2013
ÖZET
Bu tez altı bölümden oluşmaktadır. Birinci ve ikinci bölümde sırası ile Öklidyen
ve hiperbolik uzaydaki çalışmalar hakkında tarihi bilgiler ve temel kavramlar
verilmiştir. Üçüncü bölümde Öklid uzayındaki konformal üçgenler ve bu
üçgenlerin alanları, dördüncü ve beşinci bölümlerde de sırası ile küresel ve
hiperbolik düzlemde [4] deki tekniği küresel üçgenlere ve hiperbolik üçgenlere
uygulayarak yeni sonuçlar elde edilmiştir. Bu tezin sırası ile dördüncü ve
beşinci bölümlerinde ilk defa küresel ve hiperbolik konformal üçgenlerin varlığı
gösterilmiştir. Ayrıca bu bölümlerde özel küresel ve hiperbolik üçgenler
incelenmiştir. Altıncı bölümde ise de-Sitter düzlemindeki üçgen çeşitleri
incelenip, bu üçgenlerin dejenere olmayanlarının alan formülleri ilk defa bu
tezde elde edilmiştir.
Bilim Kodu
Anahtar Kelimeler
Sayfa Adedi
Tez Yöneticisi
: 204.1.049
: Hiperbolik uzay, Küresel uzay, de-Sitter uzayı, simpleks
: 122
: Prof. Dr. Baki KARLIĞA
v
TRIANGLES IN SPHERICAL HYPERBOLIC AND de-SITTER PLANES
(Ph. D. Thesis)
Ümit TOKEŞER
GAZĐ UNIVERSITY
INSTITUTE OF SCIENCE AND TECHNOLOGY
May 2013
ABSTRACT
This thesis consists of six chapters. In first and second chapter, historical
information and fundamental concepts are given in Euclidian and hyperbolical
spaces, respectively. The conformal triangles and their areas are obtained in
chapter three, whereas new results are acquired through applying the technique
of [4] to spherical and hyperbolical triangles in spherical and hyperbolical
planes in fourth and fifth chapters, respectively. The existence of the spherical
and hyperbolical conformal triangles is first shown in this study, respectively in
fourth and fifth chapters. Furthermore, special spherical and hyperbolical
triangles are issued in these chapters. In chapter six, triangle kinds in de-Sitter
plane are examined and the area formulas are firstly obtained in this thesis for
non-degenerate ones.
Science Code : 204.1.049
Key Words : Hyperbolic space, Spherical space, de-Sitter space, simplex
Page Number : 122
Adviser
: Prof. Dr. Baki KARLIĞA
vi
TEŞEKKÜR
Tez çalışmalarım boyunca yakın ilgi ve önerilerini benden esirgemeden destekleyen,
tanımaktan ve birlikte çalışmaktan onur duyduğum değerli hocam, Sayın Prof. Dr.
Baki KARLIĞA’ya ve tez izleme komitesi üyeleri değerli hocalarım, Sayın Prof. Dr.
Yusuf YAYLI ve Sayın Prof. Dr. H. Hüseyin UĞURLU’ya teşekkürlerimi bildirmeyi
bir borç bilirim. Ayrıca benden maddi ve manevi desteklerini hiçbir zaman
esirgemeyen sevgili eşim Demet TOKEŞER’e, babam Sami TOKEŞER’e ve annem
Meral TOKEŞER’e en içten sevgi ve saygılarımı sunarım.
vii
ĐÇĐNDEKĐLER
Sayfa
ÖZET........................................................................................................................... iv
ABSTRACT ................................................................................................................. v
TEŞEKKÜR ................................................................................................................ vi
ĐÇĐNDEKĐLER .......................................................................................................... vii
ŞEKĐLLERĐN LĐSTESĐ ............................................................................................... x
SĐMGELER VE KISALTMALAR ............................................................................ xii
1. GĐRĐŞ ....................................................................................................................... 1
2.TEMEL KAVRAMLAR........................................................................................... 3
2.1. Öklidyen Uzay ................................................................................................... 3
2.2. Küresel Uzay ...................................................................................................... 6
2.3. Lorentz Uzayı ..................................................................................................... 8
2.4. Hiperbolik ve de Sitter Uzayı ........................................................................... 12
2.5. Öklidyen, Küresel ve Hiperbolik Uzayda Tanımlar ........................................ 14
3. ÖKLĐD DÜZLEMĐNDE KONFORMAL ÜÇGENLER........................................ 18
3.1. Öklidyen Konformal Üçgenler ........................................................................ 18
3.2. Öklid Uzayında Konformal Üçgenin Alanı .................................................... 26
4. KÜRESEL DÜZLEMDE ÜÇGENLER................................................................. 27
4.1. Küresel Üçgenlerin Alanları ........................................................................... 35
4.2. Özel Küresel Üçgenler .................................................................................... 36
4.3. Özel Küresel Üçgenlerin Kenar Uzunluklarına Bağlı Alan Formülleri .......... 37
4.3.1. Küresel eşkenar üçgenin alanı ............................................................... 37
viii
Sayfa
4.3.2. Küresel ikizkenar üçgenin alanı ............................................................ 37
4.3.3. Küresel dik üçgenin alanı ...................................................................... 38
4.4. Küresel Uzayda Konformal Üçgenler ............................................................. 38
4.5. Küresel Uzayda Özel Konformal Üçgenlerin Varlığı ..................................... 46
4.5.1. Konformal küresel eşkenar üçgen ......................................................... 46
4.5.2. Konformal küresel ikizkenar üçgen ...................................................... 47
4.5.3. Konformal küresel dik üçgen ................................................................ 48
4.6. Konformal Küresel Üçgende Đç Açıların Yarıçaplar Cinsinden Đfadesi ......... 49
4.7. Konformal Küresel Eşkenar Üçgende Đç Açıların Yarıçaplar
Cinsinden Đfadesi ............................................................................................. 50
4.8. Konformal Küresel Đkizkenar Üçgende Đç Açıların Yarıçaplar
Cinsinden Đfadesi ............................................................................................. 51
4.9. Konformal Küresel Dik Üçgende Đç Açıların Yarıçaplar Cinsinden
Đfadesi .............................................................................................................. 52
5. HĐPERBOLĐK DÜZLEMDE ÜÇGENLER .......................................................... 53
5.1. Hiperbolik Üçgenlerin Alanları ....................................................................... 62
5.2. Özel Hiperbolik Üçgenler ............................................................................... 67
5.3. Özel Hiperbolik Üçgenlerin Kenar Uzunluklarına Bağlı Alan Formülleri ..... 68
5.3.1. Hiperbolik eşkenar üçgenin alanı .......................................................... 68
5.3.2. Hiperbolik ikizkenar üçgenin alanı ....................................................... 68
5.3.3. Hiperbolik dik üçgenin alanı ................................................................. 68
5.4. Hiperbolik Uzayda Konformal Üçgenler ........................................................ 69
5.5. Hiperbolik Uzayda Özel Konformal Üçgenlerin Varlığı ................................ 73
5.5.1. Konformal hiperbolik eşkenar üçgen .................................................... 73
ix
Sayfa
5.5.2. Konformal hiperbolik ikizkenar üçgen ................................................. 75
5.5.3. Konformal hiperbolik dik üçgen ........................................................... 77
5.6. Konformal Hiperbolik Üçgende Đç Açıların Yarıçaplar Cinsinden Đfadesi .... 79
5.7. Konformal Hiperbolik Eşkenar Üçgende Đç Açıların Yarıçaplar
Cinsinden Đfadesi ............................................................................................. 80
5.8. Konformal Hiperbolik Đkizkenar Üçgende Đç Açıların Yarıçaplar
Cinsinden Đfadesi ............................................................................................. 80
6. de-SITTER DÜZLEMĐNDE ÜÇGENLER ........................................................... 82
6.1. de-Sitter Uzayında Doğru ve Doğru Parçaları ................................................ 82
6.2. de-Sitter Uzayında Üçgen Çeşitleri ................................................................. 86
6.3. de-Sitter Düzlemindeki Üçgenlerin Ayrıt Matrisi .......................................... 91
6.3.1. de-Sitter Uzayındaki Đki Noktadan Geçen Doğruların Bazı
Özellikleri.............................................................................................. 92
6.4. de-Sitter Uzayında Ayrıt Matrisi Verilen Üçgenin Gramm Matrisi ............. 100
6.5. de-Sitter Uzayında Non-dejenere Ayrıtlı Üçgenlerin Alanları ..................... 109
6.5.1. 2 ∆10 tipinden üçgenin alanı ................................................................. 110
6.5.2. 1 ∆ 02 tipinden üçgenin alanı .................................................................. 114
KAYNAKLAR ........................................................................................................ 119
ÖZGEÇMĐŞ ............................................................................................................. 122
x
ŞEKĐLLERĐN LĐSTESĐ
Şekil
Sayfa
Şekil 3.1. Öklidyen uzayda konformal üçgen ............................................................ 19
Şekil 4.1. Küresel üçgenin iç açısı ............................................................................. 29
Şekil 4.2. Küresel üçgenin alanı ................................................................................. 36
Şekil 4.3. Küresel uzayda konformal üçgen............................................................... 39
Şekil 5.1. Hiperbolik üçgenin iç açısı ........................................................................ 55
Şekil 5.2. Projektif disk modeli .................................................................................. 62
Şekil 5.3. T (α ) iki ideal tepeli genelleştirilmiş üçgen ............................................. 62
Şekil 5.4. Üç tane sonsuz üçgene bölünmüş ideal üçgen ........................................... 65
Şekil 6.1. Işığımsı kenarlı üçgen ................................................................................ 86
Şekil 6.2. Spacelike tabanlı null ayaklı üçgen............................................................ 86
Şekil 6.3. Null tabanlı timelike ayaklı üçgen ............................................................. 87
Şekil 6.4. Timelike tabanlı null ayaklı üçgen ............................................................. 87
Şekil 6.5. Null tabanlı spacelike ayaklı üçgen ........................................................... 88
Şekil 6.6. Causal çeşit kenar üçgen ............................................................................ 88
Şekil 6.7. Uzayımsı kenarlı üçgen ............................................................................. 89
Şekil 6.8. Zamanımsı kenarlı üçgen ........................................................................... 89
Şekil 6.9. Timelike tabanlı spacelike ayaklı üçgen .................................................... 90
Şekil 6.10.Timelike ayaklı spacelike tabanlı üçgen ................................................... 90
Şekil 6.11. 0 ∆ 30 üçgeni ............................................................................................... 94
xi
Şekil
Sayfa
Şekil 6.12. 1 ∆ 02 üçgeni................................................................................................ 94
Şekil 6.13. 0 ∆12 üçgeni ............................................................................................... 95
Şekil 6.14. 0 ∆12 üçgeni ............................................................................................... 96
Şekil 6.15. 2 ∆10 üçgeni ............................................................................................... 96
Şekil 6.16. 1 ∆11 üçgeni ................................................................................................ 97
Şekil 6.17. 3 ∆ 00 üçgeni ............................................................................................... 98
Şekil 6.18. 0 ∆ 30 üçgeni ............................................................................................... 98
Şekil 6.19. 2 ∆10 üçgeni ............................................................................................... 99
Şekil 6.20. 1 ∆ 02 üçgeni.............................................................................................. 100
Şekil 6.21. 2 ∆10 tipinden üçgen ................................................................................ 110
Şekil 6.22. D bölgesi ................................................................................................ 111
Şekil 6.23. 1 ∆ 02 tipinden üçgen................................................................................. 114
Şekil 6.24. D bölgesi ............................................................................................... 115
xii
SĐMGELER VE KISALTMALAR
Bu çalışmada kullanılmış bazı simgeler ve kısaltmalar, açıklamaları ile birlikte
aşağıda sunulmuştur.
Simgeler
Açıklama
IR n +1
( n + 1)
dE
Öklidyen uzaklık fonksiyonu
dS
Küresel uzaklık fonksiyonu
dH
Hiperbolik uzaklık fonksiyonu
En
n-boyutlu Öklidyen uzay
Sn
n-boyutlu Küresel uzay
Hn
Hiperbolik uzay
S1n
de-Sitter uzay
⟨ ,⟩L
Lorentzien iç çarpım
M
Ayrıt matris
G
Gramm matris
ϕij
Ayrıt uzunluğu
θij
Dihedral (Đç) açı
-boyutlu vektör uzayı
1
1. GĐRĐŞ
Đki nokta arasındaki en kısa uzaklığın bu noktalar arasındaki doğru parçası olduğu
hipotezi Archimedes tarafından [1] de kullanılmıştır. Dokuzuncu yüzyıl sonunda bir
yüzey üzerindeki herhangi iki noktayı birleştiren en kısa yolu bulma probleminden
geodezik kavramı ortaya çıkmıştır. 1732 yılında Euler [2] de bir yüzey üzerindeki
geodeziklerin diferensiyel denklemini yayınlamıştır. Böylece iki noktaya bağlı olarak
verilen
geodeziklerin
sadece
yüzeyin
cinsine
bağlı
olarak
verilebileceği
gösterilmiştir.Archimedes ve Apollonius’un ortaçağdaki çalışmalarının Latin
tercümeleri ve 1637 de Fermat ve Dekart’ın analitik geometriye girişleri 19. yüzyılın
ilk yarısında düzlem eğrilerinin teğetlerini bulmak için kullanılan geometrik
tekniklerin gelişmesini sağlamıştır. Bir lineer olmayan eğrinin uzunluğunu veren ve
analitik geometri kullanılarak elde edilen cebirsel formül y 2 = x3 , 1658 civarında
Neil van Heuraet ve Fermat tarafından ayrı ayrı bulunmuştur. 19. yüzyılın dördüncü
çeyreğinde Öklidyen yay uzunluğu elementi Newton ve Leibnitz tarafından bağımsız
olarak bulunmuş ve bu iki geometrici düzlem eğrisinin yay uzunluğunu integral
kullanarak hesaplamışlardır. Metrik uzaylarda yay uzunluğu kavramına 1930 yılında
[3] de Menger tarafından girilmiştir.
Yukarıda tarihsel gelişimine değindiğimiz bugünkü modern geometri bir metriğe
göre en kısa yol (geodezik eğri) kavramlarına dayanmaktadır. Öklid metriğinin
model olamayacağı (rölativite gibi) soyut kavramları somut hale getirebilmek için
kullanılan
başka
metrik
uzayların
da
kullanılmasının
kaçınılmaz
olacağı
muhakkaktır. Bu gün bu uzayları Lorentzien, küresel, hiperbolik ve de-Sitter olarak
görüyoruz. “Bu uzaylarda eğri ile doğruyu birbirinden nasıl ayırt ederiz?”
problemine cevap aradığımızda karşımıza eğrilik kavramı çıkar. Bu uzaylarda bir
eğrinin bir noktasındaki eğriliği bu noktadaki teğette sapma miktarını ölçtüğünden ve
geodeziklerin eğriliği de sıfır olduğundan, geodeziği uzayın verilen iki noktasından
geçen doğru olarak düşünebiliriz. Göz önüne alınan uzaydaki
geodeziklerin
2
diferensiyel denklemini, verilen iki noktaya bağlı çözersek bu çözümün tek olduğunu
görürüz. Bu Öklid uzayındaki iki noktadan bir tek doğru geçer hipotezi ile çakışır. O
halde Öklid uzayında iki nokta ile sınırlı doğru parçası bu halde de iki nokta ile
sınırlı geodezik parçası olur. Öklid uzayındaki üçgensel bölge doğruların dış birim
normallerinin belirlediği yarı uzayların arakesiti olduğundan bu halde de
geodeziklerin belirlediği yarı uzayların arakesiti olmaktadır.
Bu tezde Öklidyen olmayan uzaylarda yeni gelişen teknikler ile üçgenlere yeniden
bakmak istenilmiştir. Bu amaçla üçüncü bölümde Öklid uzayındaki konformal
üçgenler ve bu üçgenlerin alanlarını, dördüncü ve beşinci bölümlerde de sırası ile
küresel ve hiperbolik düzlemde [4] deki tekniği küresel üçgenlere ve hiperbolik
üçgenlere uygulayarak yeni sonuçlar elde edilmiştir. Bu tezin sırası ile dördüncü ve
beşinci bölümlerinde ilk defa küresel ve hiperbolik konformal üçgenlerin varlığı
gösterilmiştir. Ayrıca bu bölümlerde özel küresel ve hiperbolik üçgenler
incelenmiştir. Altıncı bölümde ise de-Sitter düzlemindeki üçgen çeşitleri incelenip,
bu üçgenlerin dejenere olmayanlarının alan formülleri ilk defa elde edilmiştir.
3
2. TEMEL KAVRAMLAR
2.1. Öklidyen Uzay
n- boyutlu Öklid uzayı için standart analitik model, n- boyutlu IR n reel vektör uzayı
ile eşleşen IR n afin uzayıdır. IR n üzerindeki Öklidyen iç çarpım non-dejenere,
simetrik, bilineer ve pozitif tanımlıdır.
⟨ , ⟩ , V vektör uzayı üzerinde non-dejenere, simetrik, bilineer ve pozitif tanımlı bir iç
çarpım olmak üzere v ∈ V nin bu iç çarpıma göre normu
v = ⟨ v, v⟩
1
2
şeklinde tanımlı reel sayıdır [5].
2.1. Tanım
x, y ∈ IR n olmak üzere iki vektör arasındaki Öklidyen uzaklık
d E ( x, y ) = x − y
şeklinde tanımlanır [5,6].
2.2. Tanım
IR n üzerinde tanımlanan d E metriğine Öklid metriği denir [6].
4
2.3. Tanım
φ : IR n → IR n dönüşümünün bir ortogonal dönüşüm olması için gerek ve yeter şart
∀x, y ∈ IR n için
⟨φ ( x ) , φ ( y )⟩ = ⟨ x, y⟩
olmasıdır [5].
2.4. Tanım
[ a, b] , IR
de kapalı bir aralık ve a < b olmak üzere γ : [ a, b] → X
sürekli
fonksiyonuna X metrik uzayında bir eğri denir. Eğer X = E n ise γ eğrisinin lineer
olması için gerek ve yeter şart ∀t ∈ [ a, b] için
γ ( a + t (b − a )) = γ ( a ) + t (γ ( b ) − γ ( a ))
olmasıdır [5].
2.5. Tanım
E n nin x, y, z gibi üç noktası için y = x + t ( z − x ) olacak şekilde bir t ∈ [ 0,1] reel
sayısı varsa bu üç noktaya doğrusaldır denir [5].
5
2.6. Tanım
[ a, b] , IR
de kapalı bir aralık ve a < b olmak üzere α : [ a, b ] → X dönüşümü
uzunluk koruyan sürekli fonksiyon ise α ya X metrik uzayında bir jeodezik yay
denir [5].
2.7. Tanım
Bir X metrik uzayında x, y ∈ X için α : [ a, b ] → X jeodezik yayının görüntüsüne
başlangıç noktası x , bitiş noktası y olan jeodezik yay denir [5].
2.8. Tanım
E n nin jeodezik parçaları kendisinin doğru parçalarıdır [5].
2.9. Tanım
X bir metrik uzay olsun. x, y ∈ X ayrık çifti için x ve y yi içeren bir tek jeodezik
parça varsa X metrik uzayına jeodezik olarak konvekstir denir [5].
2.10. Tanım
Bir X metrik uzayında bir jeodezik λ : IR → X şeklinde bir jeodezik doğrunun
görüntüsüdür [5].
2.1. Sonuç
E n nin jeodezikleri kendisinin doğrularıdır [5].
6
2.11. Tanım
E n Öklidyen uzayda bir koordinat sistemi { x1 , x2 ,..., xn } olmak üzere
n
∑a x +b = 0
i i
i =1
ile tanımlanan hiperdüzlem B olsun. E n de
n
B1 = P : ∑ ai xi ( P ) + b > 0 ( < 0 ) , P ∈ E n
i =1
şeklinde tanımlanan kümeye yarı uzay denir [6]. B ∪ B1 kümesine kapalı yarı uzay
denir [5].
2.2. Küresel Uzay
n -boyutlu küresel geometri için standart model
S n = { x ∈ IR n +1 : x = 1}
ile tanımlanan IR n +1 in S n birim küresidir. S n üzerindeki Öklidyen metrik
d E ( x, y ) = x − y
ile verilir. Fakat bu metrik IR n +1 in vektör yapısına dayanılarak verildiğinden S n ye
özgü bir metrik değildir [5].
7
2.12. Tanım
x, y ∈ S n iki vektör ve bu iki vektör arasındaki Öklidyen açı θ ( x, y ) olsun. x ve y
arasındaki küresel uzunluk
d S ( x , y ) = θ ( x, y )
şeklinde bir reel sayıdır. Burada 0 ≤ d S ( x, y ) ≤ π ve d S ( x, y ) = π olması için gerek
ve yeter şart y = − x olmasıdır. Eğer y = − x ise x ve y vektörlerine antipodaldir
denir [5,7].
2.1. Teorem
d S küresel uzunluk fonksiyonu S n üzerinde bir metriktir [5].
Đspat
[2] den görülebilir.
2.13. Tanım
d S metriği ile birlikte S n uzayı küresel n-uzay olarak adlandırılır [5,7].
2.14. Tanım
S n nin büyük çemberi IR n +1 in iki boyutlu alt vektör uzayı ile S n nin arakesitidir.
x, y ∈ S n iki farklı nokta olsun. x, y lineer bağımsız ise, IR n +1 in V ( x, y ) ile
8
gösterilen iki boyutlu bir alt uzayını gererler. Böylece S ( x, y ) = S n ∩ V ( x, y )
kümesi, x ve y yi içeren S n nin bir büyük çemberidir. S n nin jeodezikleri onun
büyük çemberleridir [5].
2.3. Lorentz Uzayı
x, y ∈ IR n iki vektör ve n > 1 olsun. x ile y nin Lorentzian iç çarpımı
⟨ x, y⟩ L = − x1 y1 + ... + xn −1 yn −1 + xn yn
ile tanımlanan indefinit bir iç çarpımdır. Bu çarpım ile birlikte IR n uzayına Lorentz
uzayı denir ve IR1n ile gösterilir [2]. IR1n uzayında bir x vektörünün Lorentz normu
x = ⟨ x, y ⟩ L
1
2
ile, x ve y vektörünün Lorentz uzunluğu ise
d L ( x, y ) = x − y
ile tanımlanır [5].
2.15. Tanım
IR1n Lorentz uzayında
{x ∈ IR
n
1
: xn2 = x12 + ... + xn2−1}
9
şeklindeki C n −1 kümesine ışık konisi (light koni) denir. ⟨ x, x⟩ L = 0 ise x vektörüne
ışık benzeri (lightlike veya null) vektör denir [5].
2.16. Tanım
x ∈ IR1n için, ⟨ x, x⟩ L > 0 ise x vektörüne uzay benzeri (spacelike) vektör denir. C n −1
hiperkonisinin dışı, IR1n nin uzay benzeri vektörlerinden oluşan açık alt kümesidir
[5,8,9].
2.17. Tanım
x ∈ IR1n için, ⟨ x, x⟩ L < 0 oluyorsa x vektörüne zaman benzeri (timelike) vektör
denir. C n −1 hiperkonisinin içi, IR1n nin zaman benzeri vektörlerinden oluşan açık alt
kümesidir. Eğer x1 > 0 ( x1 < 0 ) ise x vektörüne pozitif (negatif) zaman benzeri denir
[5,8,9].
2.18. Tanım
Sıfırdan farklı x, y ∈ IR1n için ⟨ x, y⟩ L = 0 oluyorsa x, y vektörlerine Lorentz
ortogonaldir denir [2].
2.2. Teorem
x, y vektörleri, IR1n de sıfırdan farklı Lorentz ortogonal iki vektör olsun. Eğer x
vektörü zaman benzeri ise y vektörü uzay benzeridir [5].
10
Đspat
[5] de sayfa 60-61 den görülebilir.
2.1. Önerme
IR1n nin bir V alt vektör uzayının;
1) Zaman benzeri olması için gerek ve yeter şart V nin en az bir zaman benzeri
vektöre sahip olmasıdır.
2) Uzay benzeri olması için gerek ve yeter şart V deki sıfırdan farklı her vektörün
uzay benzeri olmasıdır.
3) Işık benzeri olması için gerek ve yeter şart V deki sıfırdan farklı her vektör için
⟨ x, x⟩ L = 0 olmasıdır [5,9].
Đspat
[5] de sayfa 61 den görülebilir.
2.19. Tanım
x ve y , IR1n de pozitif (negatif) zaman benzeri iki vektör olsun.
⟨ x, y⟩ L = − x y cosh η ( x, y )
olacak şekilde negatif olmayan bir tek η ( x, y ) reel sayısı vardır. x ve y arasındaki
Lorentz zaman benzeri (timelike) açı, η ( x, y ) olarak tanımlanır [5,8].
11
2.20. Tanım (Timelike vektörler arasındaki timelike açı)
x ve y R n nin pozitif (negatif) timelike vektörleri olsun. η ( x, y ) negatif olmayan
bir reel sayı olmak üzere
⟨ x, y⟩ L = x y cosh η ( x, y )
dir. Buna göre x ve y arasındaki Lorentzian timelike açı η ( x, y ) dir. Eğer
η ( x, y ) = 0 ise x ve y nin birbirlerinin pozitif skalar çarpımıdır [5].
2.21. Tanım (Spacelike vektörler arasındaki spacelike açı)
x ve y , R n +1 in spacelike vektörleri olsun. Böylece 0 ve π arasında bir tek η ( x, y )
reel sayısı vardır ki
⟨ x, y⟩ L = x y cosη ( x, y )
dır. x ve y arasındaki Lorentzian spacelike açı η ( x, y ) ile tanımlanır [5].
2.22. Tanım (Spacelike vektörler arasındaki timelike açı)
x ve y , timelike alt vektör uzayı tarafından gerilen R n +1 in spacelike vektörleri
olsunlar. Bir tek η ( x, y ) reel sayısı vardır ki
⟨ x, y⟩ L = x y cosh η ( x, y )
12
dir. x ve y arasındaki Lorentzian timelike açı η ( x, y ) ile tanımlanır [5].
2.23. Tanım (Timelike ve spacelike vektörler arasındaki açı)
R n +1 de x spacelike vektör ve y pozitif timelike vektör olsun. Böylece bir tek negatif
olmayan η ( x, y ) reel sayısı vardır ki
⟨ x, y⟩ L = x y sinh η ( x, y )
dir. x ve y arasındaki Lorentzian timelike açı η ( x, y ) ile tanımlanır [5].
2.4. Hiperbolik ve de-Sitter Uzayı
S1n ⊂ R1n +1 ve S1n = { x ∈ R1n +1 : < x, x >= 1} kümesine n-boyutlu birim pseudo-küresel
uzay (de-Sitter uzayı), H 0n = { x ∈ R1n +1 : < x, x >= −1} kümesine de n- boyutlu birim
pseudo-hiperbolik uzay denir. H 0n uzayının iki bağlantılı bileşeni H 0,n + ve H 0,n −
olmak üzere, bu bileşenlerin her biri n-boyutlu hiperbolik uzayın modeli olarak
alınabilir. Biz literatüre bağlı kalarak hiperbolik uzayın modeli olarak pozitif bileşeni
göz önüne alacağız, yani; H 0,n + = H n ⊂ R1n +1 olarak alacağız [5].
2.24. Tanım
x, y ∈ H n ⊂ IR1n +1 ve x ile y arasındaki Lorentzien zaman benzeri açı η ( x, y ) olsun.
x ve y arasındaki hiperbolik uzunluk
d H ( x, y ) = η ( x, y )
13
şeklinde tanımlı bir reel sayıdır.
⟨ x, y⟩ L = − x y cosh η ( x, y ) olduğundan
cosh d H ( x, y ) = −⟨ x, y⟩ L
olur [5,9].
2.3. Teorem
d H hiperbolik uzunluk fonksiyonu H n üzerinde bir metriktir [5].
Đspat
[5] den görülebilir.
2.25. Tanım
d H metriği ile birlikte H n uzayı hiperbolik n-uzay olarak adlandırılır [5].
2.26. Tanım
H n nin bir doğrusu IR1n +1 in iki boyutlu zaman benzeri alt vektör uzayı ile H n nin
arakesitidir. x, y ∈ H n
vektörleri IR n +1 in V ( x, y ) ile gösterilen iki boyutlu bir
zaman benzeri alt uzayını gererler. Böylece L ( x, y ) = H n ∩ V ( x, y ) , x den geçen
y yi içeren H n nin bir doğrusudur [5].
14
Buna göre H n nin jeodezikleri onun doğrularıdır.
2.27. Tanım
H n nin bir m-düzlemi, IR1n +1 in ( m + 1) -boyutlu zaman benzeri alt vektör uzayı ile
H n nin arakesitidir [5].
2.28. Tanım
H n nin bir hiperbolik 1-düzlemi onun hiperbolik doğruları, hiperbolik
( n − 1)
-
düzlemi onun hiperdüzlemi olarak adlandırılır [5].
2.5. Öklidyen, Küresel ve Hiperbolik Uzayda Tanımlar
Aşağıda vereceğimiz tanımlarda X = E n , H n , S n , S1n olarak alınacaktır.
2.29. Tanım
X in bir alt kümesi C olsun. Her x, y ∈ C ayrık çifti için x ve y yi içeren doğru
parçası C de kalıyorsa ( X = S n ve X = S1n için y ≠ − x ), C kümesine konveks küme
denir [5].
2.30. Tanım
X de bir konveks alt küme C olsun. ∂C nin boştan farklı en büyük konveks alt
kümesine C nin bir kenarı denir [5].
15
2.31. Tanım
X de bir konveks polihedron, boştan farklı sonlu sayıda H i kapalı yarı uzaylarının
arakesitinden oluşur ve
k
P = I Hi
i =1
şeklinde ifade edilir [9].
2.32. Tanım
X de n-boyutlu bir konveks polihedron P olsun. k=1,2,…,n+1 için P nin bir kyüzü(face), P nin (k+1) yüzünün bir kenarı olarak tanımlanır [5].
2.33. Tanım
X de n-boyutlu bir konveks polihedron P olsun. P nin 0-yüzüne, P nin tepesi
denir[5].
2.34. Tanım
X in her bir A alt kümesi için, A yı içeren X in bütün konveks alt kümelerinin
arakesitine A nın konvekslik bölgesi denir [5].
16
2.35. Tanım
X de n-boyutlu bir polihedron P olsun. Eğer P nin sonlu sayıda tepe noktası varsave
P bu tepelerin konvekslik bölgesi ise ( P ∈ S n , S1n için antipodal noktaları içermezse),
P ye bir çok tepeli(politop) denir [5].
2.36. Tanım
X de (n+1) tepe noktalı, n-boyutlu bir politop’a bir n-simpleks denir [5].
2.37. Tanım
Đki boyutlu simplekse üçgen, üç boyutlu simplekse dörtyüzlü denir [10].
2.38. Tanım
S n de Ω , P1 , P2 ,..., Pn +1 tepe noktalı bir n-simpleks olsun. Bu simpleksin Pi ve Pj
tepelerine zıt i,j yinci yüzleri arasındaki açıya dihedral açı denir [10].
Bu açıyı θij olarak belirleyebiliriz.
2.39. Tanım
S n de Ω , P1 , P2 ,..., Pn +1 tepe noktalı bir n-simpleks olsun. Bu simpleksin Pi ve Pj
tepe noktaları arasındaki uzaklığa ayrıt uzunluğu denir [10].
(
φij = arccos Pi , Pj
) şeklinde belirlenir.
17
2.40. Tanım
Ω bir küresel dörtyüzlü olsun. Bu dörtyüzlünün Pi ve Pj tepe noktaları arasındaki
uzaklık φij = arccos ( < Pi , Pj > ) dir [10].
Buna göre cos φij =< Pi , Pj > olur.
2.41. Tanım
M = [< Pi , Pj >] = [cos φij ] matrisine Ω küresel dörtyüzlünün ayrıt matrisi denir [10].
2.4. Teorem (Schlafli Diferensiyel Formülü)
Sqn ( ε ) , IRqn +1 uzayında ε
işaretli merkezcil hiperquadriği irtibatlı bileşeni, Sqn ( ε )
daki 1 ve 2 eş boyutlu yüzleri üzerinde non dejenere olan Vn ( Ω ) hacminin
diferensiyeli
dVn ( Ω ) =
ε
n −1
∑ V ( F ) dα
n −2
F
F
şeklindedir. Burada Vn − 2 ( F ) , Ω nın n-2 yüzünün hacmi ve α F
de F yüzündeki
dihedral açıdır [11].
n = 2 özel halinde {i, j , k} kümesi {1, 2,3} kümesinin bir permütasyonu ve θij , Pk
köşesindeki açı olmak üzere;
dV2 ( Ω ) = ε ( dθ12 + dθ13 + dθ 23 )
olur.
(2.1)
18
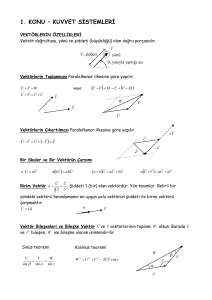
3. ÖKLĐD DÜZLEMĐNDE KONFORMAL ÜÇGENLER
3.1. Öklidyen Konformal Üçgenler
Cooper ve Rivin [12] de Öklid uzayında konformal simpleks tanımı verip, bu tip
simplekslerin tepe açılarının değişimini incelemişlerdir. Bu bölümde [12] deki
tanımın konformal üçgenler için tanıtımını yapacağız.
3.1. Tanım (Öklidyen uzayda konformal dörtyüzlü)
∆, E 3 de bir simpleks olsun. P1 , P2 , P3 , P4 ile ∆ nin köşelerini, ϕij ile Pi , Pj köşeleri
arasındaki uzunluğu, Pi , Pj köşelerinin üzerinde bulunduğu ayrıttaki dihedral açıyı
da θij ile gösterelim. Bu durumda ∆ konformal ise ϕij = ri + rj , i ≠ j ve r1 ,..., r4 > 0
dır [12].
Bu tanımı P1 , P2 , P3 köşeli ∆ üçgeni için düşünürsek aşağıdaki şekli elde ederiz.
19
Şekil 3.1. Öklidyen uzayda konformal üçgen
Bu modellemenin doğruluğunu gösterelim. Đki çember düzlemde bir noktada teğet
→
→
ise Pi X = λ Pj X veya X =
→
→
⟨ Pi X , Pi X ⟩ = ri 2
ifadesinden
Pi − λ Pj
1− λ
.
20
a = ⟨ Pi , Pi ⟩ + ⟨ Pj , Pj ⟩ − 2⟨ Pi , Pj ⟩ − ri 2
b = 2ri 2
c = − ri 2
olmak üzere
aλ 2 + bλ + c = 0
ifadesinden
λ1 =
− ri
ve
→
PP
i j − ri
λ2 =
ri
→
PP
i j − ri
bulunur.
− ri
Bunları kullanarak, λ =
→
olur. Buradan
PP
i j − ri
→
X ij =
PP
i j Pi + ri ( Pj − Pi )
→
i ≠ j ve i, j = 1, 2,3
PP
i j
olur. Buradan X ij = X ji
i ≠ j ve i, j = 1, 2, 3 olmak üzere;
→
→
PP
r
P
r
P
−
+
=
i i
i j
i j − rj Pj + rj Pi
i j
PP
denkleminde i ≠ j ve i = 1, j = 2 değerini yerine yazarak,
21
→
→
PP
−
r
P
+
r
P
=
1 1
1 2
1 2 − r2 P2 + r2 P1
1 2
PP
→
→
P1 P2 − ( r1 + r2 ) P1 P2 = 0
→
P2 P1 ≠ 0 olmak üzere;
→
P1 P2 = r1 + r2
→
elde edilir. Benzer şekilde
P1 P3 = r1 + r3 ve
→
P2 P3 = r2 + r3 olarak bulunur. Bu
modellemenin doğruluğunu gösterir. Buna göre 3 çemberin birbirine göre
durumlarını inceleyelim:
X ij = X ik
i ≠ j ≠ k ve i, j , k = 1, 2,3 olmak üzere
→
→
PP
−
r
P
+
r
P
i i
i j
i k − ri Pi + ri Pk
i j
PP
=
→
→
PP
PP
i j
i k
→
olur. PP
i j = ri + rj olduğunu kullanarak
ri Pj + rj Pi
ri + rj
=
ri Pk + rk Pi
ri + rk
eşitliğinden ve
22
→
→
Pk Pi ≠ 0 ve Pk Pj ≠ 0 olduğundan
rj − rk = 0 , ri + rk = 0
veya
rj = rk ve rk = −ri .
Bu, yarıçap negatif değer alamayacağından üç çemberin birbirine aynı anda teğet
olamayacağı anlamına gelir.
Şimdi çemberlerin merkezlerini köşe kabul eden üçgenin kenarlarını çemberlerin
yarıçapları cinsinden ifade edelim.
→
→
PP
⟨ Pi , Pi ⟩ + ⟨ Pj , Pj ⟩ − 2⟨ Pi , Pj ⟩
i j = ri + rj ve PP
i j =
olduğundan
ri + rj = ⟨ Pi , Pi ⟩ + ⟨ Pj , Pj ⟩ − 2⟨ Pi , Pj ⟩
ve
2
⟨ Pi , Pj ⟩ =
Pi + Pj
2
− ( ri + rj )
2
2
olarak elde edilir. Aynı zamanda bu çemberlerin teğet noktası
(3.1)
23
X=
ri Pj + rj Pi
ri + rj
olduğundan
⟨ X , P1 ⟩ = ⟨ X , P2 ⟩
ve
2
r P − r2 P1
⟨ P1 , P2 ⟩ = 1 2
r1 − r2
2
.
Bu ifade Eş. 3.1 de i = 1 ve j = 2 değerlerine göre yerine yazıldığında
2
P1 − P2
2
= r12 − r22 .
Buradan i ≠ j için
Pi
2
= Pj
2
+ ri 2 − rj2
(3.2)
elde edilir. Eş. 3.2 yi Eş.3.1 de yerine yazarak
⟨ Pi , Pj ⟩ = Pi
2
− ri 2 − ri rj
ifadesi bulunur. Şimdi P1 , P2 , P3 tepe noktalı üçgenin
(3.3)
24
⟨ P1 , P1 ⟩ ⟨ P1 , P2 ⟩ ⟨ P1 , P3 ⟩
M = ⟨ P1 , P2 ⟩ ⟨ P2 , P2 ⟩ ⟨ P2 , P3 ⟩
⟨ P1 , P3 ⟩ ⟨ P2 , P3 ⟩ ⟨ P3 , P3 ⟩
ayrıt matrisini ve
2
⟨ P1 , P1 ⟩ = P1 ,
2
⟨ P1 , P2 ⟩ = P1 − r12 − r1r2 ,
2
⟨ P1 , P3 ⟩ = P1 − r12 − r1r3 ,
2
⟨ P2 , P2 ⟩ = P1 + r22 − r12 ,
2
⟨ P2 , P3 ⟩ = P1 − r12 − r2 r3 ,
2
⟨ P3 , P3 ⟩ = P1 + r32 − r12 ,
eşitlikleri kullanılarak da M ayrıt matrisini
2
P1
2
M = P1 − r12 − r1r2
2 2
P1 − r1 − r1r3
2
P1 − r12 − r1r2
2
P1 + r22 − r12
2
P1 − r12 − r2 r3
P1 − r12 − r1r3
2
P1 − r12 − r2 r3
2
P1 + r32 − r12
2
şeklinde yazabiliriz. Öklidyen üçgen için M = 0 olduğundan
(
2
2
2
)
4r1r2 r3 P1 r1 + P1 r2 + P1 r3 − r13 − r12 r2 − r12 r3 − r1r2 r3 = 0
bulunur. r1r2 r3 ≠ 0 olmak üzere;
25
P1
2
r +r
= r1 ( r1 + r2 ) 1 3
r1 + r2 + r3
elde edilir.
Benzer işlemler yapılarak
r +r
⟨ P1 , P2 ⟩ = − r1r2 1 2 ,
r1 + r2 + r3
r +r
⟨ P1 , P3 ⟩ = − r1r3 1 3 ,
r1 + r2 + r3
r +r
⟨ P2 , P3 ⟩ = − r2 r3 2 3 ,
r1 + r2 + r3
P2
P3
2
2
r +r
= r2 ( r1 + r2 ) 2 3 ,
r1 + r2 + r3
r +r
= r3 ( r1 + r3 ) 2 3 ,
r1 + r2 + r3
elde edilir. Bunları kullanarak
→
P1 P2 = r1 + r2 ,
→
P1 P3 = r1 + r3 ,
→
P2 P3 = r2 + r3
bulunur.
(3.4)
26
3.2. Öklid Uzayında Konformal Üçgenin Alanı
3.1. Teorem
Ökidyen konformal üçgenin çevrel çemberinin yarıçapı
R=
( r1 + r2 )( r1 + r3 )( r2 + r3 )
4 r1r2 r3 ( r1 + r2 + r3 )
olmak üzere alanı
A = r1r2 r3 ( r1 + r2 + r3 )
şeklindedir.
Đspat
Eş. 3.4 ve [13] den görülür.
27
4. KÜRESEL DÜZLEMDE ÜÇGENLER
4.1. Tanım
α : IR → S n ve x, y ∈ S n için
α ( t ) = cos t x + sin t
( y − ⟨ x, y ⟩ x )
y − ⟨ x, y ⟩ x
eğrisine S n nin x, y den geçen doğrusu denir.
4.2. Tanım
α : IR → S n ve x, y ∈ S n için
α ( t ) = cos t x + sin t
( y − cos t1 x ) ,
sin t1
t ∈ [ 0, t1 ]
eğri parçasına S n nin x, y ile sınırlı doğru parçası denir.
4.3. Tanım
x, y, z üçü aynı küresel doğru üzerinde bulunmayan üç nokta olmak üzere;
α ( t ) = cos t x + sin t
( y − cos t1 x ) ,
β ( s ) = cos s y + sin s
sin t1
( z − cos s1 y ) ,
sin s1
t ∈ [ 0, t1 ]
s ∈ [ 0, s1 ]
28
γ ( u ) = cos u z + sin u
( x − cos u1 z ) ,
sin u1
u ∈ [ 0, u1 ]
ve α ( t1 ) = β ( 0 ) , β ( s1 ) = γ ( 0 ) , γ ( u1 ) = α ( 0 ) olacak şekildeki doğru parçalarının
birleşimine küresel üçgen, üçgenin sınırladığı küresel bölgeye de küresel üçgensel
bölge denir.
4.4. Tanım
Pi , Pj ∆ nın iki köşe noktası ise
cos ϕij = ⟨ Pi , Pj ⟩
özelliğindeki ϕij küresel açısına ∆ nın Pi , Pj ile sınırlı ayrıt uzunluğu denir [4].
4.5. Tanım
P1 , P2 , P3 köşe noktalı küresel üçgen ∆ olmak üzere
1
M = cos ϕ12
cos ϕ13
cos ϕ12
1
cos ϕ23
cos ϕ13
cos ϕ23
1
matrisine ∆ nın ayrıt matrisi denir [4].
29
4.6. Tanım
∆ Pi , Pj , Pk köşeli küresel üçgen ve Pk noktasından geçen kenarları üzerinde
bulunduğu doğrular da
α : IR → S n ,
β : IR → S n
ise
⟨α ı ( t ) , ⟨ β ı ( s ) ⟩ = cos θij
Pk
Pk
olacak şekildeki θij açısına ∆ nın Pk noktasındaki iç açısı denir.
Şekil 4.1. Küresel üçgenin iç açısı
30
4.7. Tanım
P1 , P2 , P3 köşe noktalı küresel üçgen ∆ olsun. θ12 , θ13 , θ 23 ∆ nın iç açıları olmak üzere
1
G = − cos θ12
− cos θ13
− cos θ12
− cos θ13
− cos θ 23
1
1
− cos θ 23
matrisine ∆ nın Gramm matrisi denir [4].
4.8. Tanım
x, y IR3 ün vektörleri olsun. x ve y nin vektörel çarpımı
x × y = ( x2 y3 − x3 y2 , x3 y2 − x2 y3 , x1 y2 − x2 y1 )
şeklindedir [5].
4.1. Teorem
w, x, y, z IR3 ün vektörleri olmak üzere
(1) x × y = − y × x ,
x1
(2) ( x × y ) .z = y1
z1
x2
x
y2
z2
y3 ,
z3
(3) ( x × y ) × z = ( x.z ) y − ( y.z ) x ,
31
(4) ( x × y ) . ( z × w ) =
x.z
y.z
x.w
y.w
dir [5].
4.2. Teorem
n ( n + 1)
π
tane ϕij = ϕ ji ∈ 0, , i ≠ j , i, j = 1, 2,..., n + 1 pozitif reel sayıların bir ∆
2
2
küresel simpleksin ayrıtları olması için gerek ve yeter şart ∆ nın M = cos ϕij ayrıt
matrisinin, köşegen üzerindeki elemanları 1 e eşit olan pozitif tanımlı simetrik matris
olmasıdır [4].
4.1. Lemma
θij ,θ jk ,θ ki küresel üçgenin sırası ile Pi , Pj , Pk noktalarındaki iç açıları ve ϕ ki , ϕij , ϕ jk
da ∆ nın ayrıtları olmak üzere
1. ϕ ki ( Pk × Pi , Pi × Pj ) = π − θ ij
2. ϕij ( Pi × Pj , Pj × Pk ) = π − θ jk
3. ϕ jk ( Pj × Pk , Pk × Pi ) = π − θ ki [5].
4.3. Teorem
θij ,θ jk ve θ ki küresel üçgenin iç açıları olmak üzere
θij + θ jk + θ ki > π .
32
Đspat
θij ,θ jk ve θ ki ∆ küresel üçgenin iç açıları olsun. O zaman
(( P × P ) × ( P × P )) .( P × P ) = ( P .( P × P )) P − ( P .( P × P ) ) P .( P × P )
i
j
k
j
k
i
i
(
k
j
j
)(
j
k
= Pi . ( Pk × Pj ) Pj . ( Pk × Pj )
(
= − Pj . ( Pk × Pj )
)
j
i
k
i
)
2
<0 .
Teorem 4.1 in (2) şıkkından x × y, z × y, z × x lineer bağımsızdırlar ve bunların ilişkili
olduğu birim vektörler küresel doğrudaş değillerdir. O zaman
ϕ ki ( Pk × Pi , Pi × Pj ) < ϕij ( Pi × Pj , Pj × Pk ) + ϕ jk ( Pj × Pk , Pk × Pi ) .
Lemma 4.1 den
π − θij < θ jk + θ ki
olup
θij + θ jk + θ ki > π
elde edilir.
33
4.4. Teorem (Küresel üçgen için sinüs kuralı)
θij ,θ jk ve θ ki ∆ küresel üçgenin açıları ve ϕij , ϕ jk , ϕ ki de sırası ile Pk , Pi ve Pj
köşelerinin karşısındaki kenarların uzunlukları olmak üzere;
sin ϕij
sin θij
=
sin ϕ jk
=
sin θ jk
sin ϕki
[5].
sin θ ki
4.5. Teorem
∆ P1 , P2 , P3 köşe noktalı küresel üçgen, M ve G de ∆ nın sırası ile ayrıt ve gramm
matrisleri olsun. M ii ( i = 1, 2,3) , M nin asli minörleri olmak üzere
M ij
G=
M ii M jj
dir [4].
4.1. Sonuç (Küresel üçgen için cosinüslerin birinci kuralı)
θij ,θ jk ve θ ki ∆ küresel üçgenin açıları ve ϕij , ϕ jk , ϕ ki de sırası ile Pk , Pi ve Pj
köşelerinin karşısındaki kenarların uzunlukları olmak üzere;
cos θij =
cos ϕ ki − cos ϕij cos ϕ jk
sin ϕij sin ϕ jk
dir (Burada {i, j , k} , {1, 2,3} kümesinin bir permütasyonudur).
34
Đspat
Teorem 4.5 den görülür.
4.6. Teorem
∆ P1 , P2 , P3 köşe noktalı küresel üçgen, M ve G de ∆ nın sırası ile ayrıt ve gramm
matrisleri olsun. Gii ( i = 1, 2,3) , G nin asli minörleri olmak üzere
Gij
M =
Gii G jj
dir [4].
4.2. Sonuç (Üçgen için cosinüslerin ikinci kuralı)
θij ,θ jk ve θ ki Ω küresel üçgenin iç açıları ve ϕij , ϕ jk , ϕ ki de sırası ile Pk , Pi ve Pj
köşelerinin karşısındaki kenarların uzunlukları olmak üzere;
cos ϕki =
cos ϕij cos ϕ jk + cos ϕki
sin ϕij sin ϕ jk
dir.
Đspat
Teorem 4.6 dan görülür.
35
4.1. Küresel Üçgenlerin Alanları
4.7. Teorem
θ12 ,θ13 ve θ 23 genelleştirilmiş ∆ küresel üçgenin iç açıları olmak üzere
V2 ( ∆ ) = (θ12 + θ13 + θ 23 ) − π
dır.
Đspat
Eş. 2.1 de ε = 1 alarak
dV2 ( ∆ ) = dθ12 + dθ13 + dθ 23
olur ve V2 = Alan ( ∆ ) olmak üzere her iki tarafın integrali alındığında
V2 ( ∆ ) = θ12 + θ13 + θ 23 + c
(4.1)
elde edilir.
Özel olarak P1 = (1, 0, 0 ) , P2 = ( 0,1,0 ) , P = ( 0, 0,1) köşe noktalı ∆ 0 küresel üçgenin iç
açıların toplamı
π
2
ve
=
3π
+c
2
3π
π
ve alan
dir. Bu değerleri Eş. 4.1 de yerine yazarsak
2
2
36
c = −π
bulunur. Bunu da Eş. 4.1 de yerine yazdığımızda sonuç elde edilir.
Şekil 4.2. Küresel üçgenin alanı
4.2. Özel Küresel Üçgenler
4.9. Tanım
∆ ; P1 , P2 , P3 tepeli, θ12 , θ13 , θ 23 dihedral açılı ve ϕ12 , ϕ13 , ϕ23 ayrıt uzunluklu bir küresel
üçgen olsun. ∆ ∈ S 2 olmak üzere θ12 = θ13 = θ 23 , ϕ12 = ϕ13 = ϕ23 ve θ12 >
eşkenar küresel üçgen denir [14].
π
3
ise ∆ ya
37
4.10. Tanım
∆ ∈ S 2 olmak üzere θ12 = θ13 ve 2θ12 > π − θ 23 ise ∆ ya ikizkenar küresel üçgen
denir [14].
4.11. Tanım
∆ ∈ S 2 olmak üzere cos ϕ12 = cos ϕ13 cos ϕ 23 ise ∆ ya küresel dik üçgen denir [14].
4.3. Özel Küresel Üçgenlerin Kenar Uzunluklarına Bağlı Alan Formülleri
4.3.1. Küresel eşkenar üçgenin alanı
∆ ∈ S 2 ve cos ϕ12 = cos ϕ13 = cos ϕ23 = a olmak üzere küresel eşkenar üçgenin alanı
( a − 1)( 3a + 1) 2a + 1
−π
Alan ( ∆ ) = arctan
− a ( −a 2 + 6a + 3)
şeklindedir [14].
4.3.2. Küresel ikizkenar üçgenin alanı
∆ ∈ S 2 , cos ϕ12 = cos ϕ13 = a ve cos ϕ23 = c olmak üzere küresel ikizkenar üçgenin
alanı
( 2a + c + 1) ( c − 1) ( −c + 2a 2 − 1)
−π
Alan ( ∆ ) = arctan
−a 2 c + 3a 2 + 2ac + 2a + c 2 + c
şeklindedir [14].
38
4.3.3. Küresel dik üçgenin alanı
a = cos ϕ12 , b = cos ϕ13 , c = cos ϕ23 ve a = bc özelliğindeki ∆ ∈ S 2 küresel dik üçgenin
alanı
( b + c + bc + 1) ( b 2 − 1)( c 2 − 1)
−π
Alan ( ∆ ) = arctan
+
+
+
c
1
b
1
b
c
( )( )(
)
şeklindedir [14].
4.4. Küresel Uzayda Konformal Üçgenler
4.11. Tanım
∆, P1 , P2 , P3 köşe noktalı küresel üçgen için PP
i j ile sınırlı ayrıt uzunluğu ϕ ij olsun.
0 < ϕij = ri + rj ≤
üçgen denir [4].
π
2
olacak şekilde ri , rj ∈ IR + sayıları varsa ∆ ’ya konformal küresel
39
Şekil 4.3. Küresel uzayda konformal üçgen
4.8. Teorem
P1 , P2 , P3 köşe noktalı küresel üçgen ∆ olsun. ∆ ’nın konformal olması için gerek ve
yeter şart
1
cos ( r1 + r2 ) cos ( r1 + r3 )
1
cos ( r2 + r3 )
M = cos ( r1 + r2 )
cos ( r1 + r3 ) cos ( r2 + r3 )
1
olmasıdır.
40
Đspat
∆ konformal olsun.
ri = arccos Pi , P = PP
, i = 1, 2,3
i
rj = arccos Pj , P = Pj P , j = 1, 2,3
ri + rj = PP
i j i ≠ j , j = 1, 2,3
(
ri + rj = arccos Pi , Pj
)
veya
cos ( ri + rj ) = Pi , Pj
i≠ j
i, j = 1, 2,3
bulunur. Bu eşitlikler kullanılarak
1
cos ( r1 + r2 ) cos ( r1 + r3 )
M = cos ( r1 + r2 )
1
cos ( r2 + r3 )
cos ( r1 + r3 ) cos ( r2 + r3 )
1
bulunur.
Tersine
1
cos ( r1 + r2 ) cos ( r1 + r3 )
M = cos ( r1 + r2 )
1
cos ( r2 + r3 )
cos ( r1 + r3 ) cos ( r2 + r3 )
1
şeklinde ise
(4.2)
41
M = 4sin r1 sin r2 sin r3 sin ( r1 + r2 + r3 ) > 0 , M 11 = sin 2 ( r2 + r3 ) > 0 ,
M 22 = sin 2 ( r1 + r3 ) > 0 , M 33 = sin 2 ( r1 + r2 ) > 0
olduğundan M pozitif tanımlı ve bir küresel üçgenin ayrıt matrisidir. Ayrıca
cos ϕ12 = cos ( r1 + r2 ) , cos ϕ13 = cos ( r1 + r3 ) ve cos ϕ23 = cos ( r2 + r3 ) eşitliklerinden
ve 0 < ϕij <
π
2
olduğundan da 0 < ϕij = ri + rj ≤
π
2
. O zaman
ϕij = d ( Pi , Pj ) = d ( Pi , P ) + d ( P, Pj )
bulunur. Bu ise ∆ nın konformal olduğunu gösterir.
4.9. Teorem
∆ P1 , P2 , P3 köşe noktalı küresel üçgenin konformal olması için gerek ve yeter şart
π − 2r1
π
r1 ∈ 0, ise r2 ∈ ( 0, r1 ) ve r3 ∈ 0,
2
4
veya
π − 2r1
π π
r1 ∈ , ise r2 , r3 ∈ 0,
2
4 2
olmasıdır.
42
Đspat
∆ konformal küresel üçgen olsun. O zaman 0 < ϕij = ri + rj ≤
π
2
, i ≠ j = 1, 2,3 olmak
zorundadır.
1
cos ( r1 + r2 ) cos ( r1 + r3 )
M = cos ( r1 + r2 )
1
cos ( r2 + r3 )
cos ( r1 + r3 ) cos ( r2 + r3 )
1
pozitif
tanımlı
olduğundan
M ii = sin 2 ( rj + rk ) > 0, ( i, j , k ) ∈ S3
(4.3)
M = 4sin r1 sin r2 sin r3 sin ( r1 + r2 + r3 ) > 0
ve
,
sin ( r1 + r2 + r3 ) > 0 ⇔ 0 < r1 + r2 + r3 < π
olur. Böylece
π
0 < r1 + r2 ≤ 2
0 < r + r ≤ π
1
3
2
π
0 < r2 + r3 ≤
2
0 < r1 + r2 + r3 < π
eşitsizlik sistemi elde edilir. Bu sistemin çözümünden
π − 2r1
π
r1 ∈ 0, ise r2 ∈ ( 0, r1 ) ve r3 ∈ 0,
2
4
veya
(4.4)
43
π − 2r1
π π
r1 ∈ , ise r2 , r3 ∈ 0,
2
4 2
bulunur.
Tersine
π − 2r1
π
r1 ∈ 0, olmak üzere r2 ∈ ( 0, r1 ) ve r3 ∈ 0,
2
4
veya
π π
π − 2r1
r1 ∈ , olmak üzere r2 , r3 ∈ 0,
2
4 2
olsun. O zaman 0 < r1 + r2 + r3 < π ve 0 < r1 + r2 ≤
eşitsizliklerini
elde
ederiz.
Böylece
π
2
, 0 < r1 + r3 ≤
π
2
, 0 < r2 + r3 ≤
π
2
sin ( r1 + r2 + r3 ) > 0, 0 < cos ( r1 + r2 ) < 1,
0 < cos ( r1 + r3 ) < 1 ve 0 < cos ( r2 + r3 ) < 1 olur. O zaman
1
cos ( r1 + r2 ) cos ( r1 + r3 )
A = cos ( r1 + r2 )
1
cos ( r2 + r3 )
cos ( r1 + r3 ) cos ( r2 + r3 )
1
matrisi vardır. A = 4sin r1 sin r2 sin r3 sin ( r1 + r2 + r3 ) > 0 , A11 = sin 2 ( r2 + r3 ) > 0 ,
A22 = sin 2 ( r1 + r3 ) > 0 , A33 = sin 2 ( r1 + r2 ) > 0 olduğundan A matrisi pozitif tanımlı ve
köşegen üzerindeki elemanları 1 olduğundan Teorem 4.2 den A bir ∆ küresel
üçgeninin ayrıt matrisidir. O halde
44
ϕij = ri + rj
de ∆ nın ayrıt uzunluklarıdır. Bu ise ∆ nın konformal küresel üçgen olması
demektir.
4.12. Tanım
C ( M , r ) = { X ∈ S 2 : M , X = cos r} kümesine S 2 de M
merkezli r
yarıçaplı
çember denir.
P1 , P2 , P3 köşeli küresel üçgen ∆ ise ∆ ’nın konformal olması d S nin metrik
olmasından Pi , Pj ve P noktalarının aynı geodezik üzerinde ise
d S ( Pi , Pj ) = d S ( Pi , P ) + d S ( Pj , P )
i≠ j
olacak şekilde bir tek P noktasının var olmasıyla mümkündür. Bu ise Pi merkezli ri
yarıçaplı küresel çember ile Pj merkezli rj yarıçaplı küresel çemberin P noktasında
teğet olması anlamına gelir.
4.3. Sonuç
Konformal küresel üçgenin köşelerini merkez kabul eden r1 , r2 , r3 yarıçaplı çemberler
ikişer ikişer birbirine teğettir.
4.10. Teorem
∆ konformal küresel üçgenin iç açıları ile çemberlerin yarıçapları arasındaki
bağıntılar
45
cos θ12 =
cos ( r1 + r2 ) − cos ( r1 + r3 ) cos ( r2 + r3 )
sin ( r1 + r3 ) sin ( r2 + r3 )
cos θ13 =
cos ( r1 + r3 ) − cos ( r1 + r2 ) cos ( r2 + r3 )
sin ( r1 + r2 ) sin ( r2 + r3 )
cos θ 23 =
cos ( r2 + r3 ) − cos ( r1 + r2 ) cos ( r1 + r3 )
sin ( r1 + r2 ) sin ( r1 + r3 )
şeklindedir.
Đspat
Teorem 4.5 den
cos θij =
− M ij
M ii M jj
i, j = 1, 2,3 .
Bu eşitliğin sağ tarafını Eş. 4.2 den ve ayrıt uzunluğu ile yarıçaplar arasındaki
cos ϕ23 = cos ( r2 + r3 )
cos ϕ12 = cos ( r1 + r2 )
cos ϕ13 = cos ( r1 + r3 )
sin ϕ23 = sin ( r2 + r3 )
sin ϕ12 = sin ( r1 + r2 )
sin ϕ13 = sin ( r1 + r3 )
bağıntıları kullanılarak bulunur.
46
4.5. Küresel Uzayda Özel Konformal Üçgenlerin Varlığı
4.5.1. Konformal küresel eşkenar üçgen
4.11. Teorem
∆ , P1 , P2 , P3 köşe noktalı ve Pi , Pj ile sınırlı ayrıt uzunluğu ϕij olan konformal
küresel eşkenar üçgen vardır.
Đspat
∆ konformal küresel eşkenar üçgen olsun. Bu durumda ϕ12 = ϕ13 = ϕ23 olup
cos ϕ12 = cos ϕ13 = cos ϕ23 = cos ( r1 + r2 )
olacağından
1
cos ( r1 + r2 ) cos ( r1 + r2 )
1
cos ( r1 + r2 )
M = cos ( r1 + r2 )
cos ( r1 + r2 ) cos ( r1 + r2 )
1
(4.5)
olur.
Teorem 4.2 den M = ( −1 + cos ( r1 + r2 ) ) (1 + cos ( r1 + r2 ) ) > 0 , M 11 = sin 2 ( r1 + r2 ) > 0 ,
2
M 22 = sin 2 ( r1 + r2 ) > 0 ,
M 33 = sin 2 ( r1 + r2 ) > 0
ve
0 < ri + rj ≤
π
2
, i ≠ j = 1, 2,3
olduğundan 0 < cos ( r1 + r2 ) < 1 olur. Böylece M ayrıt matrisi pozitif tanımlıdır. O
halde ∆ konformal küresel eşkenar üçgen vardır.
47
4.4. Sonuç
∆ konformal küresel eşkenar üçgen iken
0 < ri <
π
4
veya
π
4
≤ ri <
π
2
, i = 1, 2, 3 .
4.5.2. Konformal küresel ikizkenar üçgen
4.12. Teorem
∆ , P1 , P2 , P3 köşe noktalı ve Pi , Pj ile sınırlı ayrıt uzunluğu ϕij olan konformal
küresel ikizkenar üçgen vardır.
Đspat
∆ konformal küresel ikizkenar üçgen olsun. Bu durumda ϕ12 = ϕ13 olup
cos ϕ12 = cos ϕ13 = cos ( r1 + r2 )
ve
cos ϕ23 = cos ( r2 + r3 )
olacağından
1
cos ( r1 + r2 ) cos ( r1 + r2 )
M = cos ( r1 + r2 )
1
cos ( r2 + r3 )
cos ( r1 + r2 ) cos ( r2 + r3 )
1
(4.6)
48
olur. Teorem 4.2 den
M = 4sin r1 sin 2 r2 sin ( r1 + r2 ) > 0 , M 11 = sin 2 ( r2 + r3 ) > 0 ,
M 22 = sin 2 ( r1 + r2 ) > 0 ,
M 33 = sin 2 ( r1 + r2 ) > 0
ve
0 < ri + rj ≤
π
2
, i ≠ j = 1, 2,3
olduğundan 0 < cos ( r1 + r2 ) < 1 , 0 < cos ( r2 + r3 ) < 1 olur. Böylece M ayrıt matrisi
pozitif tanımlıdır. O halde ∆ konformal küresel ikizkenar üçgen vardır.
4.5. Sonuç
∆ konformal küresel ikizkenar üçgen iken
π
π
r1 ∈ 0, olmak üzere r2 , r3 ∈ 0,
4
2
veya
π π
π
r1 ∈ , olmak üzere r2 , r3 ∈ 0, .
4 2
4
4.5.3. Konformal küresel dik üçgen
4.13. Teorem
∆ , P1 , P2 , P3 köşe noktalı ve Pi , Pj ile sınırlı ayrıt uzunluğu ϕij olan konformal
küresel dik üçgen vardır.
Đspat
∆ konformal küresel dik üçgen olsun. Bu durumda cos ϕ12 = cos ϕ13 cos ϕ 23 olup
cos ( r1 + r2 ) = cos ( r1 + r3 ) cos ( r2 + r3 )
49
olacağından
1
cos ( r1 + r3 ) cos ( r2 + r3 ) cos ( r1 + r3 )
1
cos ( r2 + r3 )
M = cos ( r1 + r3 ) cos ( r2 + r3 )
cos ( r1 + r3 )
cos ( r2 + r3 )
1
(4.7)
olur. Teorem 4.2 den M = sin 2 ( r1 + r3 ) sin 2 ( r2 + r3 ) > 0 , M 11 = sin 2 ( r2 + r3 ) > 0 ,
M 22 = sin 2 ( r1 + r3 ) > 0 ,
0 < ri + rj ≤
π
2
, i ≠ j = 1, 2,3
M 33 = 1 − cos 2 ( r1 + r3 ) cos 2 ( r2 + r3 ) > 0
ve
olduğundan 0 < cos ( r1 + r2 ) < 1 , 0 < cos ( r1 + r3 ) < 1 ,
0 < cos ( r2 + r3 ) < 1 olur. Böylece M ayrıt matrisi pozitif tanımlıdır. O halde ∆
konformal küresel dik üçgen vardır.
4.6. Sonuç
∆ konformal küresel dik üçgen iken
π − 2r1
π
r1 ∈ 0, ise r2 ∈ ( 0, r1 ) ve r3 ∈ 0,
2
4
veya
π − 2r1
π π
r1 ∈ , ise r2 , r3 ∈ 0,
2 .
4 2
[4] deki (27) eşitliğinden
cos θij =
− M ij
M ii M jj
, i ≠ j ; i, j = 1, 2,3
(4.8)
50
ve [15] deki Sonuç 14 den
sin θij =
M
M ii M jj
, i ≠ j ; i, j = 1, 2,3 .
(4.9)
4.6. Konformal Küresel Üçgende Đç Açıların Yarıçaplar Cinsinden Đfadesi
Eş. 4.8 ve Eş. 4.9 taraf tarafa oranlanır ve M ij , M ii , M jj ve M ifadeleri yerine
yazılırsa
4 sin r1 sin r2 sin r3 sin ( r1 + r2 + r3 )
,
cos ( r1 + r2 ) − cos ( r1 + r3 ) cos ( r2 + r3 )
θ12 = arctan
4sin r1 sin r2 sin r3 sin ( r1 + r2 + r3 )
cos ( r1 + r3 ) − cos ( r1 + r2 ) cos ( r2 + r3 )
θ13 = arctan
ve
4 sin r1 sin r2 sin r3 sin ( r1 + r2 + r3 )
cos ( r2 + r3 ) − cos ( r1 + r2 ) cos ( r1 + r3 )
θ 23 = arctan
elde edilir.
4.7. Konformal Küresel Eşkenar Üçgende Đç Açıların Yarıçaplar Cinsinden
Đfadesi
Eş. 4.8 ve Eş. 4.9 taraf tarafa oranlanır ve M ij , M ii , M jj ve M ifadeleri yerine
yazılırsa
51
θ12 = arctan
θ13 = arctan
(1 + cos ( r + r ) )
1
2
cos ( r1 + r2 )
,
(1 + cos ( r + r ) )
1
2
cos ( r1 + r2 )
ve
θ 23 = arctan
(1 + cos ( r + r ) )
1
cos ( r1 + r2 )
2
elde edilir.
4.8. Konformal Küresel Đkizkenar Üçgende Đç Açıların Yarıçaplar Cinsinden
Đfadesi
Eş. 4.8 ve Eş. 4.9 taraf tarafa oranlanır ve M ij , M ii , M jj ve M ifadeleri yerine
yazılırsa
4sin r sin 2 r sin ( r + r )
1
2
1
2
,
θ12 = arctan
2
cos ( r1 + r2 ) sin ( r2 + r3 )
4sin r sin 2 r sin ( r + r )
1
2
1
2
θ13 = arctan
cos ( r1 + r2 ) sin 2 ( r2 + r3 )
ve
52
4sin r sin 2 r sin ( r + r )
1
2
1
2
θ 23 = arctan
2
cos ( r2 + r3 ) − cos ( r1 + r2 )
elde edilir.
4.9. Konformal Küresel Dik Üçgende Đç Açıların Yarıçaplar Cinsinden Đfadesi
Eş. 4.8 ve Eş. 4.9 taraf tarafa oranlanır ve M ij , M ii , M jj ve M ifadeleri yerine
yazılırsa
θ12 =
π
2
,
sin ( r1 + r3 )
cos ( r1 + r3 ) sin ( r2 + r3 )
θ13 = arctan
ve
sin ( r2 + r3 )
cos ( r2 + r3 ) sin ( r1 + r3 )
θ 23 = arctan
elde edilir.
53
5. HĐPERBOLĐK DÜZLEMDE ÜÇGENLER
5.1. Tanım
α : IR → H n ve x, y ∈ H n için
α ( t ) = cosh t x + sinh t
( y + ⟨ x, y ⟩ x )
y + ⟨ x, y ⟩ x
eğrisine H n nin x, y den geçen doğrusu denir.
5.2. Tanım
α : IR → H n ve x, y ∈ H n için
α ( t ) = cosh t x + sinh t
( y − cosh t1 x ) ,
sinh t1
t ∈ [ 0, t1 ]
eğri parçasına H n nin x, y ile sınırlı doğru parçası denir.
5.3. Tanım
x, y, z üçü aynı hiperbolik doğru üzerinde bulunmayan üç nokta olmak üzere;
α ( t ) = cosh t x + sinh t
( y − cosh t1 x ) ,
β ( s ) = cosh s y + sinh s
sinh t1
( z − cosh s1 y ) ,
sinh s1
t ∈ [ 0, t1 ]
s ∈ [ 0, s1 ]
54
γ ( u ) = cosh u z + sinh u
( x − cosh u1 z ) ,
sinh u1
u ∈ [ 0, u1 ]
α ( t1 ) = β ( 0 ) , β ( s1 ) = γ ( 0 ) ve γ ( u1 ) = α ( 0 )
özelliğindeki
doğru
parçalarının
birleşimine hiperbolik üçgen, üçgenin sınırladığı hiperbolik bölgeye de hiperbolik
üçgensel bölge denir.
5.4. Tanım
Pi , Pj Ω nın iki köşe noktası olmak üzere;
cosh ϕij = −⟨ Pi , Pj ⟩
özelliğindeki ϕij reel sayısına Ω nın Pi , Pj ile sınırlı ayrıt uzunluğu denir [4].
5.5. Tanım
P1 , P2 , P3 köşe noktalı hiperbolik üçgen Ω olmak üzere
−1
M = − cosh ϕ12
− cosh ϕ13
− cosh ϕ12
−1
− cosh ϕ23
− cosh ϕ13
− cosh ϕ23
−1
matrisine Ω nın ayrıt matrisi denir [4].
55
5.6. Tanım
Pi , Pj , Pk köşeli Ω hiperbolik üçgeninin Pk noktasından geçen kenarları da
α : IR → H n ,
β : IR → H n
ise
⟨α ı ( t ) , ⟨ β ı ( s ) ⟩ = cos θij
Pk
Pk
olacak şekildeki θ ij açısına Ω nın Pk noktasındaki iç açısı denir.
Şekil 5.1. Hiperbolik üçgenin iç açısı
5.7. Tanım
P1 , P2 , P3 köşe noktalı hiperbolik üçgen Ω olmak üzere ve θ12 , θ13 , θ 23 de Ω nın iç
açıları olmak üzere;
56
1
G = − cos θ12
− cos θ13
− cos θ12
1
− cos θ 23
− cos θ13
− cos θ 23
1
matrisine Ω nın Gramm matrisi denir [4].
5.1. Teorem
n ( n + 1)
2
tane ϕij = ϕ ji , i ≠ j , i, j = 1, 2,..., n + 1 pozitif reel sayıların bir Ω
hiperbolik simpleksin ayrıtları olması için gerek ve yeter şart
Ω
nın
M = − cosh ϕij ayrıt matrisinin
i) M < 0
ii) M −1 in tüm asli altmatrisleri pozitif tanımlı
iii) M ij > 0, i ≠ j ; i, j = 1, 2,3
özelliklerini sağlamasıdır[4].
5.1. Lemma
θij , θ jk , θ ki hiperbolik üçgenin sırası ile Pi , Pj , Pk noktalarındaki iç açıları ve
ϕ ki , ϕij , ϕ jk da Ω nın ayrıtları olmak üzere;
1. ϕ ki ( Pk ⊗ Pi , Pi ⊗ Pj ) = π − θij
2. ϕij ( Pi ⊗ Pj , Pj ⊗ Pk ) = π − θ jk
3. ϕ jk ( Pj ⊗ Pk , Pk ⊗ Pi ) = π − θ ki [5].
57
5.2. Lemma
Pi ve Pj , IR 3 de space-like vektörler olsun. Pi ⊗ Pj time-like vektör olmak üzere
Pi ⊗ Pj = Pi Pj sinh ϕij
dir [5].
5.2. Teorem
θ ij , θ jk ve θ ki hiperbolik üçgenin iç açıları olmak üzere;
θij + θ jk + θ ki < π .
Đspat
θ ij , θ jk ve θ ki Ω hiperbolik üçgenin iç açıları olsun. Pi ⊗ Pj , Pk ⊗ Pj ve Pk ⊗ Pi
vektörleri lineer bağımsız iseler
u=
Pi ⊗ Pj
Pi ⊗ Pj
,v=
Pk ⊗ Pj
, w=
Pk ⊗ Pj
Pk ⊗ Pi
Pk ⊗ Pi
şeklinde yazılabilir. O zaman
( P ⊗ P ) ⊗ ( P ⊗ P ) = (( P ⊗ P ) o P ) P
i
ve
j
k
j
i
j
k
j
58
( P ⊗ P ) ⊗ ( P ⊗ P ) = (( P ⊗ P ) o P ) P
k
j
k
i
i
j
k
k
olduğunda u ⊗ v ve v ⊗ w timelike vektörlerdir. Lemma 5.2 den
cos (η ( u , v ) + η ( v, w) ) = cosη ( u, v ) cosη ( v, w) − sin η ( u, v ) sin η ( v, w )
= ( u o v )( v o w) + u ⊗ v v ⊗ w
> ( u o v )( v o w) + ( ( u ⊗ v ) o ( v ⊗ w ) )
= ( u o v )( v o w ) + ( ( u o w)( v o v ) − ( v o w )( u o v ) )
=u o w
= cosη ( u , w)
olur. Buna göre
η ( u , w ) > η ( u, v ) + η ( v, w )
veya
2π − η ( u, w ) < η ( u, v ) + η ( v, w )
olur. Lemma 5.1 den η ( u , w ) = π − θij , η ( u , v ) = π − θ jk ve η ( v, w ) = π − θ ki elde
edilir. Böylece π > θ ij + θ jk + θ ki veya π + θ ij < θ jk + θ ki dır. θ ij açısını en büyük açı
olarak kabul etmek genelliği bozmaz. π + θ ij < θ jk + θ ki ise π + θ ij < θ jk + θ ki < π + θ ij
çelişkisi elde edilir. O halde yalnızca θij + θ jk + θ ki < π olur.
59
5.3. Teorem (Hiperbolik üçgen için sinüs kuralı)
θ ij , θ jk ve θ ki Ω hiperbolik üçgenin iç açıları ve ϕij , ϕ jk , ϕ ki de sırası ile Pk , Pi ve Pj
köşelerinin karşısındaki kenarların uzunlukları olmak üzere;
sinh ϕij
sin θij
=
sinh ϕ jk
sin θ jk
=
sinh ϕ ki
[5].
sin θ ki
5.4. Teorem
Ω P1 , P2 , P3 köşe noktalı hiperbolik üçgen, M ve G de Ω nın sırası ile ayrıt ve
Gramm matrisleri olsun. M ii ( i = 1, 2,3) , M nin asli minörleri olmak üzere;
M ij
G = −
M ii M jj
dir [4].
5.1. Sonuç (Hiperbolik üçgen için cosinüslerin birinci kuralı)
θ ij , θ jk ve θ ki Ω hiperbolik üçgenin açıları ve ϕij , ϕ jk , ϕ ki de sırası ile Pk , Pi ve Pj
köşelerinin karşısındaki kenarların uzunlukları olmak üzere;
cos θ ij =
cosh ϕ ki cosh ϕij − cosh ϕ jk
sinh ϕ ki sinh ϕij
dir (Burada {i, j, k} , {1, 2,3} kümesinin bir permütasyonudur).
60
Đspat
Teorem 5.4 den açıktır.
5.5. Teorem
Ω P1 , P2 , P3 köşe noktalı hiperbolik üçgen, M ve G de Ω nın sırası ile ayrıt ve
gramm matrisleri olsun. Gii ( i = 1, 2,3) , G nin asli minörleri olmak üzere;
Gij
M = −
Gii G jj
dir [4].
5.2. Sonuç (Hiperbolik üçgen için cosinüslerin ikinci kuralı)
θ ij , θ jk ve θ ki Ω hiperbolik üçgenin açıları ve ϕij , ϕ jk , ϕ ki de sırası ile Pk , Pi ve Pj
köşelerinin karşısındaki kenarların uzunlukları olmak üzere;
cosh ϕ ki =
cos ϕij cos ϕ jk + cos ϕ ki
sin ϕij sin ϕ jk
dir.
Đspat
Teorem 5.5 den açıktır.
61
5.1. Hiperbolik Üçgenlerin Alanları
H 2 de bir bölge birbirinden farklı zıt olmayan iki yarı düzlemin kesişimi şeklinde
tanımlanır. H 2 nin herhangi bölgesi (η ,θ ) hiperbolik koordinatları altında tanımlı
α
α
S (α ) bölgesiyle uyumludur − ≤ θ ≤ .
2
2
e1 , I 2 den geçen doğrunun parametrik denklemi
α
γ ( t ) = ( cosh t ,sinh t cos β ,sinh t sin β ) β = ,
2
e1 , I1 den geçen doğrunun parametrik denklemi
σ ( t ) = ( cosh t ,sinh t cos β , − sinh t sin β )
dır. Đdeal tepelerdeki açılar sıfır olarak ölçülür.
V ∩ H 2 = L ve L nin belirlediği sınırlı yarı düzlem H L− ile S (α ) daire kesmesinin
arakesiti T (α ) olsun.
62
Şekil 5.2. Projektif disk modeli
Şekil 5.3. T (α ) iki ideal tepeli genelleştirilmiş üçgen
63
5.8. Tanım
En az bir tane ideal tepeli genelleştirilmiş hiperbolik üçgene sonsuz hiperbolik üçgen
denir [5].
5.9. Tanım
Üç ideal tepeli sonsuz hiperbolik üçgene ideal hiperbolik üçgen denir [5].
Tam olarak iki ideal tepeli her sonsuz hiperbolik üçgenin bir α açısı için T (α ) ya
kongruent olduğu açıktır. Şimdi T (α ) nın L kenarının
(η ,θ )
hiperbolik
koordinatlardaki parametrik ifadesini elde edelim.
(1, cos β ,sin β ) × (1, cos β , − sin β ) = ( −2 cos β sin β , 2sin β , 0 )
vektörü, H 2 ile kesişimi L olan iki boyutlu V alt vektör uzayının normalidir. Bu
nedenle V deki vektörler aşağıdaki denklemi sağlar;
( cos β ) x1 − x2 = 0
denklemini sağlarlar.
Diğer taraftan H 2 nin tüm noktaları
x1
x2
x
3
=
cosh η
= sinh η cos θ
= sinh η sin θ
denklemini sağladığından L nin tüm noktaları
64
x1 = sec β cos θ x12 − 1
denklemini sağlar. Buradan
x1 =
cos θ
cos θ − cos β
2
2
, x2 =
cos θ cos β
cos θ − cos β
2
2
, x3 =
sin θ cos β
cos 2 θ − cos 2 β
olur.
5.3. Lemma
Alan T (α ) = π − α dır.
Đspat
X (θ ) = ( x1 (θ ) , x2 (θ ) , x3 (θ ) ) L nin polar açı parametrizasyonu olsun. O zaman
Hacim ( X ) =
∫
sinh n −1 η1 sinh n − 2 η 2 ...sinh ηn −1dη1...dη n
h −1 ( x )
formülünden,
Alan T (α ) =
β η ( e1 , x (θ ) )
∫ ∫
−β
sinh η dη dθ
0
β
=
∫ ( cosh η ( e , x (θ ) ) − 1) dθ
1
−β
β
=
∫ x (θ ) dθ − α
1
−β
65
ve
β
∫β
x1 (θ ) dθ =
−
∫β
∫β
−
olup u =
β
β
cos θ − cos β
2
2
=
∫β
−
cos θ dθ
sin 2 β − sin 2 θ
sin θ
dönüşümü kullanılarak
sin β
x1 (θ ) dθ =
−
β
cos θ dθ
1
∫
−1
du
1− u
1
2
= arcsin u −1 = π
elde edilir. Böylece
Alan T (α ) = π − α
bulunur.
Şekil 5.4. Üç tane sonsuz üçgene bölünmüş ideal üçgen
66
5.4. Lemma
Ω 0 ideal hiperbolik üçgeninin alanı π dir.
Đspat
Ω 0 herhangi ideal üçgen ve X de Ω 0 nin içinde herhangi bir nokta olsun. Ω 0 yi üç
tane sonsuz hiperbolik üçgen şeklinde gösterebiliriz ki bunların her biri X gibi sadece
sonlu tepelere sahiptir (Şekil 5.4).
X tepesine sahip üçgenlerin açıları θ ij , θ jk ve θ ki olmak üzere
Alan ( Ω ) = (π − θ ij ) + (π − θ jk ) + (π − θ ki ) = π
olarak bulunur.
5.6. Teorem
θ12 ,θ13 ve θ 23 genelleştirilmiş Ω hiperbolik üçgenin açıları olmak üzere
Alan ( Ω ) = π − (θ12 + θ13 + θ 23 )
dır.
Đspat
Teorem 2.4 de n = 2 iken V0 ( F ) = 1 ve ε = −1 alınırsa
dV2 ( Ω ) = − ( dθ12 + dθ13 + dθ 23 )
67
olur ve her iki tarafın integrali alındığında
V2 ( Ω ) = − (θ12 + θ13 + θ 23 ) + c
(5.1)
elde edilir. Ω 0 hiperbolik üçgenin köşeleri sonsuzda birleştiği için her bir iç açısı
sıfırdır ve V2 ( Ω0 ) = π dir. Bu değerleri Eş. 5.1 de yerine yazarsak
c =π
ve Alan ( Ω ) = π − (θ12 + θ13 + θ 23 ) elde edilir.
5.2. Özel Hiperbolik Üçgenler
5.10. Tanım
Ω ; P1 , P2 , P3 tepeli, θ12 , θ13 , θ 23 dihedral açılı ve ϕ12 , ϕ13 , ϕ23 ayrıt uzunluklu bir
hiperbolik üçgen olsun. Ω ∈ H 2 olmak üzere θ12 = θ13 = θ 23 , ϕ12 = ϕ13 = ϕ23 ve
θ12 <
π
3
ise Ω ya eşkenar hiperbolik üçgen denir [14].
5.11. Tanım
Ω ∈ H 2 olmak üzere θ12 = θ13 ve 2θ12 < π − θ 23 ise Ω ya ikizkenar hiperbolik üçgen
denir [14].
5.12. Tanım
Ω ∈ H 2 olmak üzere cosh ϕ12 = cosh ϕ13 cosh ϕ23 ise Ω ya hiperbolik dik üçgen
denir[14].
68
5.3. Özel Hiperbolik Üçgenlerin Kenar Uzunluklarına Bağlı Alan Formülleri
5.3.1. Hiperbolik eşkenar üçgenin alanı
Ω ∈ H 2 ve cosh ϕ12 = cosh ϕ13 = cosh ϕ 23 = a olmak üzere hiperbolik eşkenar üçgenin
alanı
( a − 1)( 3a + 1) 2a + 1
Alan ( Ω ) = π − arctan
2
a
a
−
6
a
−
3
(
)
şeklindedir [14].
5.3.2. Hiperbolik ikizkenar üçgenin alanı
Ω ∈ H 2 , cosh ϕ12 = cosh ϕ13 = a ve cosh ϕ23 = c olmak üzere hiperbolik ikizkenar
üçgenin alanı
− ( c − 1) ( 2a 2 − c − 1) ( 2a + c + 1)
Alan ( Ω ) = π − arctan
3a 2 − a 2 c + 2ac + 2a + c 2 + c
şeklindedir [14].
5.3.3. Hiperbolik dik üçgenin alanı
a = cosh ϕ12 , b = cosh ϕ13 , c = cosh ϕ23 ve a = bc özelliğindeki Ω ∈ H 2 hiperbolik dik
üçgenin alanı
69
−
Alan ( Ω ) = π − arctan
(b
2
− 1)( c 2 − 1) ( b + c + bc + 1)
( c + 1)( b + 1)( b + c )
şeklindedir [14].
5.4. Hiperbolik Uzayda Konformal Üçgenler
5.13. Tanım
m ∈ H 2 ve r ∈ IR + olmak üzere
{P ∈ H
2
: ⟨ m, P⟩ = − cosh r} kümesine H 2 de m
merkezli r hiperbolik yarıçaplı çember denir.
5.14. Tanım
Ω , P1 , P2 , P3 köşe noktalı hiperbolik üçgen olsun. Pi , Pj ile sınırlı ayrıt uzunluğu ϕij
olmak üzere
ϕij = ri + rj
olacak şekilde r1 , r2 , r3 ∈ IR + reel sayıları varsa Ω ’ya konformal hiperbolik üçgen
denir.
5.7. Teorem
Ω , P1 , P2 , P3 köşe noktalı hiperbolik üçgen olsun. Ω ’nın konformal olması için gerek
ve yeter şart
ri > ln 2 , i = 1, 2,3
70
olacak şekilde r1 , r2 , r3 ∈ IR + sayılarının bulunmasıdır.
Đspat
Ω konformal hiperbolik üçgen olsun. ϕij = ri + rj olacak şekilde ri , rj ∈ IR + vardır.
Tanım 5.5 den
−1
− cosh ( r1 + r2 ) − cosh ( r1 + r3 )
M = − cosh ( r1 + r2 )
−1
− cosh ( r2 + r3 )
− cosh ( r1 + r3 ) − cosh ( r2 + r3 )
−1
(5.2)
Teorem 5.1 den
i) M = −4sinh r1 sinh r2 sinh r3 sinh ( r1 + r2 + r3 ) < 0
1
ii) M −1 in asli alt matrisleri csc hr1 csc hr2 csc hr3 csc h ( r1 + r2 + r3 ) = k olmak üzere
4
1
1
ksinh2 ( r1 +r3)
cosh( r2 −r3) −2cosh( r2 +r3 ) +cosh( 2r1 +r2 +r3 ) ) k
(
4
8
( M−1)11 =1
1
2
( cosh( r −r ) −2cosh( r +r ) +cosh( 2r +r +r ) ) k
ksinh ( r1 +r2 )
2 3
2 3
1 2 3
8
4
1
1
ksinh2 ( r2 +r3)
cosh( r1 −r3) −2cosh( r1 +r3 ) +cosh( r1 +2r2 +r3 ) ) k
(
4
8
( M−1)22 =1
1
2
( cosh( r −r ) −2cosh( r +r ) +cosh( r +2r +r ) ) k
ksinh ( r1 +r2 )
1 3
1 3
1
2 3
4
8
71
1
1
ksinh2 ( r2 +r3)
cosh( r1 −r2 ) −2cosh( r1 +r2 ) +cosh( r1 +r2 +2r3) ) k
(
4
8
( M−1)33 =1
1
2
( cosh( r −r ) −2cosh( r +r ) +cosh( r +r +2r ) ) k
ksinh ( r1 +r3 )
1 2
1 2
1 2
3
8
4
(M )
1
= sinh 2 ( r1 + r2 )
4
(M )
1
= sinh 2 ( r1 + r3 )
4
(M )
1
= sinh2 ( r2 + r3 )
4
−1
11,22
−1
11,33
−1
22,33
olup, bu matrisler pozitif tanımlıdır.
iii) M12 = cosh ( r1 + r3 ) cosh ( r2 + r3 ) − cosh ( r1 + r2 ) > 0
(5.3)
M13 = cosh ( r1 + r2 ) cosh ( r2 + r3 ) − cosh ( r1 + r3 ) > 0
(5.4)
M 23 = cosh ( r1 + r2 ) cosh ( r1 + r3 ) − cosh ( r2 + r3 ) > 0
(5.5)
M11 = − sinh 2 ( r2 + r3 ) , M 22 = − sinh 2 ( r1 + r3 ) , M 33 = − sinh 2 ( r1 + r2 )
(5.6)
eşitsizlik sisteminden
(
(
))
(5.7)
(
(
))
(5.8)
(
(
))
(5.9)
1 −( r1 + r2 + r3 )
e
1 + e 2 r3 −2 + e2 r1 + e 2 r2 1 + e 2 r1 ( −2 + e2 r3 ) > 0
4
1 −( r1 + r2 + r3 )
e
1 + e 2 r2 −2 + e 2 r1 + e 2 r3 1 + e 2 r1 ( −2 + e 2 r2 ) > 0
4
1 −( r1 + r2 + r3 )
e
1 + e 2 r1 −2 + e 2 r2 + e 2 r3 1 + e 2 r2 ( −2 + e 2 r1 ) > 0
4
eşitlik sistemi elde edilir. Bu sistemi çözerek
72
ri > ln 2 , i = 1, 2,3
bulunur.
Tersine, ri > ln 2 , i = 1, 2, 3 ise Eş. 5.7- Eş. 5.9 eşitsizlikleri sağlanır. Bu nedenle
de Eş. 5.3-Eş. 5.6 eşitsizlikleri de sağlanmış olur. Buradan
M 11
M% = M 12
M 13
M 12
M 22
M 23
M 13
M 23
M 33
ve Teorem 5.4 kullanılarak
−1
− cosh ( r1 + r2 ) − cosh ( r1 + r3 )
M = − cosh ( r1 + r2 )
−1
− cosh ( r2 + r3 )
− cosh ( r1 + r3 ) − cosh ( r2 + r3 )
−1
bulunur. Bu ise ayrıt uzunlukları ϕ12 = r1 + r2 , ϕ13 = r1 + r3 , ϕ23 = r2 + r3 olan Ω
hiperbolik üçgeninin konformal olduğunu gösterir.
5.8. Teorem
Ω konformal hiperbolik üçgenin iç açıları ile çemberlerin yarıçapları arasındaki
bağıntılar
cos θij =
cosh ( ri + rk ) − cosh ( ri + rj ) cosh ( rj + rk )
şeklindedir.
sinh ( ri + rk ) sinh ( ri + rj )
73
Đspat
Sonuç 5.1 den açıktır.
5.5. Hiperbolik Uzayda Özel Konformal Üçgenlerin Varlığı
5.5.1. Konformal hiperbolik eşkenar üçgen
5.9. Teorem
Ω , P1 , P2 , P3 köşe noktalı ve Pi , Pj ile sınırlı ayrıt uzunluğu ϕij olan konformal
hiperbolik eşkenar üçgen vardır.
Đspat
Ω konformal hiperbolik eşkenar üçgen olsun. Bu durumda ϕ12 = ϕ13 = ϕ23 olup
cosh ϕ12 = cosh ϕ13 = cosh ϕ23 = cosh ( r1 + r2 )
olacağından
−1
− cosh ( r1 + r2 ) − cosh ( r1 + r2 )
M = − cosh ( r1 + r2 )
−1
− cosh ( r1 + r2 )
− cosh ( r1 + r2 ) − cosh ( r1 + r2 )
−1
(5.10)
olur. M, Ω nın ayrıt matrisi olduğundan
i) M = − ( −1 + cosh ( r1 + r2 ) ) (1 + cosh ( r1 + r2 ) ) < 0
2
ii) M −1 in asli alt matrisleri ( −1 + 3cosh 2 ( r1 + r2 ) − 2 cosh 3 ( r1 + r2 ) = m olmak üzere )
74
1−cosh2 ( r1 + r2 )
−cosh( r1 + r2 ) +cosh2 ( r1 + r2 )
m
( M−1)11 = −cosh r +r m+cosh2 r +r
1−cosh2 ( r1 + r2 )
( 1 2)
( 1 2)
m
m
1−cosh2 ( r1 + r2 )
−cosh( r1 + r2 ) +cosh2 ( r1 + r2 )
m
( M−1)22 = −cosh r + r m+cosh2 r +r
1−cosh2 ( r1 + r2 )
( 1 2)
( 1 2)
m
m
1−cosh2 ( r1 + r2 )
−cosh( r1 + r2 ) +cosh2 ( r1 + r2 )
m
( M−1)33 = −cosh r + r m+cosh2 r +r
1−cosh2 ( r1 + r2 )
( 1 2)
( 1 2)
m
m
( M −1 )
11,22
− sinh 2 ( r1 + r2 )
=
M
− sinh 2 ( r1 + r2 )
=
11,33
M
(M )
−1
− sinh 2 ( r1 + r2 )
( M )22,33 = M
−1
olup, bu matrisler pozitif tanımlıdır.
iii) M12 = cosh ( r1 + r2 ) ( cosh ( r1 + r2 ) − 1) > 0
(5.11)
M13 = cosh ( r1 + r2 ) ( cosh ( r1 + r2 ) − 1) > 0
(5.12)
M 23 = cosh ( r1 + r2 ) ( cosh ( r1 + r2 ) − 1) > 0
(5.13)
eşitsizlik sistemi de bütün ri ∈ IR + için geçerlidir.
75
5.5.2. Konformal hiperbolik ikizkenar üçgen
5.10. Teorem
Ω , P1 , P2 , P3 köşe noktalı ve Pi , Pj ile sınırlı ayrıt uzunluğu ϕij olan konformal
hiperbolik ikizkenar üçgen vardır.
Đspat
Ω konformal hiperbolik ikizkenar üçgen olsun. Bu durumda ϕ12 = ϕ13 olup
cosh ϕ12 = cosh ϕ13 = cosh ( r1 + r2 )
ve
cosh ϕ23 = cosh ( r2 + r3 )
olacağından
−1
− cosh ( r1 + r2 ) − cosh ( r1 + r2 )
M = − cosh ( r1 + r2 )
−1
− cosh ( r2 + r3 )
− cosh ( r1 + r2 ) − cosh ( r2 + r3 )
−1
olur. M, Ω nın ayrıt matrisi olduğundan
i) M = −4sinh r1 sinh 2 r2 sinh ( r1 + r2 ) < 0
ii) M −1 in asli alt matrisleri ( −4sinh r1 sinh 2 r2 sinh ( r1 + r2 ) = k olmak üzere )
(5.14)
76
1−cosh2 ( r1 + r2 )
−cosh( r2 + r3 ) +cosh2 ( r1 + r2 )
k
( M−1)11 = −cosh r + r k+cosh2 r + r
1−cosh2 ( r1 + r2 )
( 2 3)
( 1 2)
k
k
−cosh( r1 + r2 ) (1−cosh( r2 + r3 ) )
1−cosh2 ( r2 + r3 )
k
k
−1
M
=
( )22
−cosh( r1 + r2 ) (1−cosh( r2 + r3 ) )
1−cosh2 ( r1 + r2 )
k
k
−cosh( r1 + r2 ) (1−cosh( r2 + r3 ) )
1−cosh2 ( r2 + r3 )
k
k
−1
( M )33 =
2
−cosh( r1 + r2 ) (1−cosh( r2 + r3 ) )
1−cosh ( r1 + r2 )
k
k
(M )
−1
11,22
− sinh 2 ( r1 + r2 )
=
M
− sinh 2 ( r1 + r2 )
=
11,33
M
( M −1 )
(M )
−1
− sinh 2 ( r2 + r3 )
=
22,33
M
olup, bu matrisler pozitif tanımlıdır.
iii) M12 = cosh ( r1 + r2 ) ( cosh ( r2 + r3 ) − 1) > 0
(5.15)
M13 = cosh ( r1 + r2 ) ( cosh ( r2 + r3 ) − 1) > 0
(5.16)
ve r2 = r3 >
(
ln 2 + 3
2
) , r > ln
1
2 olmak üzere
M 23 = cosh 2 ( r1 + r2 ) − cosh ( r2 + r3 ) > 0
(5.17)
77
olduğundan konformal hiperbolik ikizkenar üçgen vardır.
5.5.3. Konformal hiperbolik dik üçgen
5.11. Teorem
Ω , P1 , P2 , P3 köşe noktalı ve Pi , Pj ile sınırlı ayrıt uzunluğu ϕij olan konformal
hiperbolik dik üçgen yoktur.
Đspat
Ω konformal hiperbolik dik üçgen olsun. Bu durumda cosh ϕ12 = cosh ϕ13 cosh ϕ23
olup
cosh ( r1 + r2 ) = cosh ( r1 + r3 ) cosh ( r2 + r3 )
olacağından
−1
− cosh ( r1 + r3 ) cosh ( r2 + r3 ) − cosh ( r1 + r3 )
M = − cosh ( r1 + r3 ) cosh ( r2 + r3 )
−1
− cosh ( r2 + r3 )
− cosh ( r1 + r3 )
− cosh ( r2 + r3 )
−1
olur. M, Ω nın ayrıt matrisi olduğundan
i) M = − sinh 2 ( r1 + r3 ) sinh 2 ( r2 + r3 ) < 0
ii) M −1 in asli alt matrisleri ( − sinh 2 ( r1 + r3 ) sinh 2 ( r2 + r3 ) = n olmak üzere )
(5.18)
78
−cosh( r2 + r3 ) (1−cosh2 ( r1 + r3 ) )
1−cosh2 ( r1 + r3 )
n
n
−1
( M )11 =
2
2
2
−cosh( r2 + r3 ) (1−cosh ( r1 + r3 ) ) 1−cosh ( r1 + r3 ) cosh ( r2 + r3 )
n
n
−cosh( r1 + r3 ) (1−cosh2 ( r2 + r3 ) )
1−cosh2 ( r2 + r3 )
n
n
−1
( M )22 =
2
2
2
−cosh( r1 + r3 ) (1−cosh ( r2 + r3 ) ) 1−cosh ( r1 + r3 ) cosh ( r2 + r3 )
n
n
1−cosh2 ( r2 + r3 )
0
n
( M−1)33 =
1−cosh2 ( r1 + r3 )
0
n
(M )
−1
11,22
1 − cosh 2 ( r1 + r3 ) cosh 2 ( r2 + r3 )
=
M
− sinh 2 ( r1 + r3 )
=
11,33
M
( M −1 )
− sinh 2 ( r2 + r3 )
( M )22,33 =
M
−1
olup, bu matrisler pozitif tanımlıdır. Fakat
iii) M 12 = 0
olduğundan konformal hiperbolik dik üçgen yoktur.
(5.19)
79
[4] den
M ij
cos θij =
M ii M jj
, i ≠ j ; i, j = 1, 2,3
(5.20)
ve [15] deki (8) eşitliğinden
sin θij =
−M
M ii M jj
, i ≠ j ; i, j = 1, 2,3 .
(5.21)
5.6. Konformal Hiperbolik Üçgende Đç Açıların Yarıçaplar Cinsinden Đfadesi
Eş. 5.20 ve Eş. 5.21 taraf tarafa oranlanır ve M ij , M ii , M jj ve M ifadeleri yerine
yazılırsa
4 sinh r1 sinh r2 sinh r3 sinh ( r1 + r2 + r3 )
,
cosh ( r1 + r3 ) cosh ( r2 + r3 ) − cosh ( r1 + r2 )
θ12 = arctan
4sinh r1 sinh r2 sinh r3 sinh ( r1 + r2 + r3 )
cosh ( r1 + r2 ) cosh ( r2 + r3 ) − cosh ( r1 + r3 )
θ13 = arctan
ve
4 sinh r1 sinh r2 sinh r3 sinh ( r1 + r2 + r3 )
cosh ( r1 + r2 ) cosh ( r1 + r3 ) − cosh ( r2 + r3 )
θ 23 = arctan
elde edilir.
80
5.7. Konformal Hiperbolik Eşkenar Üçgende Đç Açıların Yarıçaplar Cinsinden
Đfadesi
Eş. 5.20 ve Eş. 5.21 taraf tarafa oranlanır ve M ij , M ii , M jj ve M ifadeleri yerine
yazılırsa
cosh ( r1 + r2 ) + 1
,
cosh ( r1 + r2 )
θ12 = arctan
cosh ( r1 + r2 ) + 1
cosh ( r1 + r2 )
θ13 = arctan
ve
cosh ( r1 + r2 ) + 1
cosh ( r1 + r2 )
θ 23 = arctan
elde edilir.
5.8. Konformal Hiperbolik Đkizkenar Üçgende Đç Açıların Yarıçaplar Cinsinden
Đfadesi
Eş. 5.20 ve Eş. 5.21 taraf tarafa oranlanır ve M ij , M ii , M jj ve M ifadeleri yerine
yazılırsa
4sinh r sinh 2 r sinh ( r + r )
1
2
1
2
,
θ12 = arctan
cosh ( r1 + r2 ) ( cosh ( r2 + r3 ) − 1)
4 sinh r sinh 2 r sinh ( r + r )
1
2
1
2
θ13 = arctan
cosh ( r1 + r2 ) ( cosh ( r2 + r3 ) − 1)
81
ve
4sinh r sinh 2 r sinh ( r + r )
1
2
1
2
2
cosh ( r1 + r2 ) − cosh ( r2 + r3 )
θ 23 = arctan
elde edilir.
82
6. de-SITTER DÜZLEMĐNDE ÜÇGENLER
6.1. de-Sitter Uzayında Doğru ve Doğru Parçaları
6.1. Teorem
p, q ∈ S1n ve w = q − ⟨ p, q⟩ p olmak üzere
(i)
p, q < 1 ⇔ w spacelike,
(ii)
p, q > 1 ⇔ w timelike,
(iii)
p, q = 1 ⇔ w null.
Đspat
⟨ w, w⟩ = 1 − ⟨ p, q⟩ 2 eşitliği kullanılarak görülür.
6.2. Teorem
p, q ∈ S1n ve V = Sp { p, q} için
(i)
p, q < 1 ⇔ V spacelike,
(ii)
p, q > 1 ⇔ V timelike,
(iii)
p, q = 1 ⇔ V null.
83
Đspat
(i) [5] deki Teorem 3.2.6 dan,
(ii) [5] deki Teorem 3.2.7 den,
(iii) [5] deki Teorem 3.2.9 dan açıktır.
6.3. Teorem
p, q ∈ S1n ve V = Sp { p, q} olsun.
(i) V spacelike ise p, q dan geçen doğrunun parametrik denklemi
q − ⟨ p, q⟩ p
q − ⟨ p, q⟩ p
α ( t ) = ( cos t ) p + ( sin t )
, t ∈ IR
dir.
(ii) V timelike ise p, q dan geçen doğrunun parametrik denklemi
q − ⟨ p, q⟩ p
q − ⟨ p, q⟩ p
β ( s ) = ( cosh s ) p + ( sinh s )
, s ∈ IR
dir.
(iii) V null ise p, q dan geçen doğrunun parametrik denklemi
γ ( λ ) = p + λ ( q − p ) , λ ∈ IR
dir.
84
Đspat
[8] deki Önerme 28 den görülebilir.
6.4. Teorem
p, q ∈ S1n ve V = Sp { p, q} olsun.
(i) V
spacelike ise ⟨ p, q⟩ = cos t0 olmak üzere p, q ile sınırlı doğru parçasının
uzunluğu t0 ve parametrik denklemi de
q − cos t0 p
, 0 ≤ t ≤ t0 .
sin t0
α ( t ) = ( cos t ) p + ( sin t )
(ii) V
timelike ise ⟨ p, q⟩ = cosh s0 olmak üzere p, q ile sınırlı doğru parçasının
uzunluğu s0 ve parametrik denklemi de
q − cosh s0 p
, 0 ≤ s ≤ s0 .
sinh s0
β ( s ) = ( cosh s ) p + ( sinh s )
(iii) V null ise
γ (λ ) = p + λ (q − p) , 0 ≤ λ ≤ 1 .
85
Đspat
Teorem 6.3 (i) den α ( 0 ) = p , α ( t0 ) = q
ve α
sürekli olduğundan da
q − cos t0 p
, 0 ≤ t ≤ t0 noktası p, q
sin t0
α ( t ) = ( cos t ) p + ( sin t )
ile sınırlı doğru
parçası üzerindedir.
Teorem 6.3 (ii) den β ( 0 ) = p , β ( s0 ) = q
ve β
sürekli olduğundan da
q − cosh s0 p
, 0 ≤ s ≤ s0 noktası p, q ile sınırlı doğru
sinh
s
0
β ( s ) = ( cosh s ) p + ( sinh s )
parçası üzerindedir.
Teorem 6.3 (iii) den γ ( 0 ) = p
γ (λ ) = p + λ (q − p) , 0 ≤ λ ≤ 1
denklemidir.
ve γ (1) = q
p, q
ve γ
sürekli olduğundan
ile sınırlı doğru parçasının parametrik
86
6.2. de-Sitter Uzayında Üçgen Çeşitleri
1. 0 ∆ 30 Işığımsı kenarlı üçgen
Şekil 6.1. Işığımsı kenarlı üçgen
2. 1 ∆ 02 Uzayımsı tabanlı ışığımsı ayaklı üçgen
Şekil 6.2. Spacelike tabanlı null ayaklı üçgen
87
3. 0 ∆12 Işığımsı tabanlı zamanımsı ayaklı üçgen
Şekil 6.3. Null tabanlı timelike ayaklı üçgen
4. 0 ∆12 Zamanımsı tabanlı ışığımsı ayaklı üçgen
Şekil 6.4. Timelike tabanlı null ayaklı üçgen
88
5. 2 ∆10 Işığımsı tabanlı uzayımsı ayaklı üçgen
Şekil 6.5. Null tabanlı spacelike ayaklı üçgen
6. 1 ∆11 Causal çeşit kenar üçgen
Şekil 6.6. Causal çeşit kenar üçgen
89
7. 3 ∆ 00 Uzayımsı kenarlı üçgen
Şekil 6.7. Uzayımsı kenarlı üçgen
8. 0 ∆ 30 Zamanımsı kenarlı üçgen
Şekil 6.8. Zamanımsı kenarlı üçgen
90
9. 2 ∆10 Zamanımsı tabanlı uzayımsı ayaklı üçgen
Şekil 6.9. Timelike tabanlı spacelike ayaklı üçgen
10. 1 ∆ 02 Uzayımsı tabanlı zamanımsı ayaklı üçgen
Şekil 6.10. Timelike ayaklı spacelike tabanlı üçgen
91
6.3. de-Sitter Düzlemindeki Üçgenlerin Ayrıt Matrisleri
6.5. Teorem
→ →
→ →
u , v null vektörlerinin lineer bağımlı olması için gerek ve yeter şart ⟨ u , v ⟩ = 0
olmasıdır.
Đspat
[29] daki Önerme 1.1.5 den görülebilir.
6.6. Teorem
→
p, q ∈ S12 için pq vektörünün null olması için gerek ve yeter şart ⟨ p, q⟩ = 1
olmasıdır.
Đspat
→
→
⟨ pq, pq⟩ = 0 ⇒ 2(1 − ⟨ p, q⟩ ) = 0
⇒ ⟨ p, q⟩ = 1
→
→
Tersine ⟨ p, q⟩ = 1 ⇒ ⟨ pq, pq⟩ = 2(1 − ⟨ p, q⟩ ) = 0
→
olup pq nulldur.
6.7. Teorem
p, q, r 0 ∆ 30 tipinden üçgenin sıralı köşeleri ise r noktası p ve q nun belirlediği doğru
üzerindedir.
92
Đspat
→
0
→
→
∆ 30 tipinden ise pq, pr ve qr kenar doğrultuları nulldur. O zaman Teorem 6.6 dan
⟨ p, q⟩ = ⟨ p, r ⟩ = ⟨ q, r ⟩ = 1
ve
→
→
⟨ pq, pr ⟩ = 0 .
Teorem 6.5 den
{
→
→
pq, pr
}
→
→
→
lineer bağımlıdır. pr = λ pq ⇒ r = p + λ pq bu ise r
noktasının p,q ile belli doğru üzerinde olmasıdır.
6.3.1. de-Sitter Uzayındaki Đki Noktadan Geçen Doğruların Bazı Özellikleri
1. V = Sp {Pi , Pj } timelike ve ⟨ Pi , Pj ⟩ > 1 olması için gerek ve yeter şart Pi , Pj
noktaları V ∩ S1n hiperbolünün aynı parçası üzerinde olmasıdır ([8] deki Önerme 38
durum 2 den).
2. V = Sp {Pi , Pj } timelike ve ⟨ Pi , Pj ⟩ < −1 olması için gerek ve yeter şart Pi , Pj
noktaları V ∩ S1n hiperbolünün farklı parçaları üzerinde olmasıdır ([8] deki Önerme
38 durum 2 den).
3. V = Sp {Pi , Pj } nin spacelike olması için gerek ve yeter şart ⟨ Pi , Pj ⟩ < 1 olmasıdır
([8] deki Önerme 38 durum 1 den).
93
4. V = Sp {Pi , Pj } nin null olması için gerek ve yeter şart ⟨ Pi , Pj ⟩ = 1 olmasıdır ([8]
deki Önerme 38 durum 3 den).
Pi , Pj ile sınırlı geodezik parçası lij olmak üzere,
5. lij nin hiperbol parçası olması için gerek ve yeter şart ⟨ Pi , Pj ⟩ > 1 olmasıdır [8].
6. lij nin elips parçası olması için gerek ve yeter şart ⟨ Pi , Pj ⟩ < 1 olmasıdır [8].
7. lij nin null doğru parçası olması için gerek ve yeter şart ⟨ Pi , Pj ⟩ = 1 olmasıdır [8].
Bu özellikleri kullanarak aşağıdaki sonuçları verebiliriz.
6.1. Sonuç
0
∆ 30 tipinden üçgen dejeneredir.
1. 0 ∆ 30 üçgeninin ayrıt matrisi
1 1 1
M = 1 1 1 .
1 1 1
94
Şekil 6.11. 0 ∆ 30 üçgeni
2. 1 ∆ 02 üçgeninin ayrıt matrisi
1 cos ϕ13
1
M = 1
1
1 .
cos ϕ13 1
1
Şekil 6.12. 1 ∆ 02 üçgeni
95
3. 0 ∆12 üçgeninin ayrıt matrisi
1
M = 1
cosh ϕ13
1
1
cosh ϕ23
cosh ϕ13
cosh ϕ 23 .
1
Şekil 6.13. 0 ∆12 üçgeni
4. 0 ∆12 üçgeninin ayrıt matrisi
1 cosh ϕ13
1
M = 1
1
1 .
cosh ϕ13 1
1
96
Şekil 6.14. 0 ∆12 üçgeni
5. 2 ∆10 üçgeninin ayrıt matrisi
1
M = 1
cos ϕ13
1
1
cos ϕ23
Şekil 6.15. 2 ∆10 üçgeni
cos ϕ13
cos ϕ 23 .
1
97
6. 1 ∆11 üçgeninin ayrıt matrisi
1
M = 1
cosh ϕ13
1
1
cos ϕ23
cosh ϕ13
cos ϕ23 .
1
Şekil 6.16. 1 ∆11 üçgeni
7. 3 ∆ 00 üçgeninin ayrıt matrisi
1
M = cos ϕ12
cos ϕ13
cos ϕ12
1
cos ϕ23
cos ϕ13
cos ϕ23
1
98
Şekil 6.17. 3 ∆ 00 üçgeni
8. 0 ∆ 30 üçgeninin ayrıt matrisi
1
M = cosh ϕ12
cosh ϕ13
cosh ϕ12
1
cosh ϕ23
Şekil 6.18. 0 ∆ 30 üçgeni
cosh ϕ13
cosh ϕ 23 .
1
99
9. 2 ∆10 üçgeninin ayrıt matrisi
1
M = cos ϕ12
cosh ϕ13
cos ϕ12
1
cos ϕ23
cosh ϕ13
cos ϕ23 .
1
Şekil 6.19. 2 ∆10 üçgeni
10. 1 ∆ 02 üçgeninin ayrıt matrisi
1
M = cos ϕ12
cosh ϕ13
cos ϕ12
1
cosh ϕ23
cosh ϕ13
cosh ϕ 23 .
1
100
Şekil 6.20. 1 ∆ 02 üçgeni
6.4. de-Sitter Uzayında Ayrıt Matrisi Verilen Üçgenin Gramm Matrisi
6.8. Teorem
M , ∆ üçgeninin ayrıt matrisi, ε i , M nin M ii ≠ 0 minörünün işareti ve
ui =
∑M
ij
Pj
−ε i M M ii
olsun.
(i) ∆ nın Pi
köşesinin karşısındaki kenarın ui normalinin spacelike olması için
gerek ve yeter şart M ii < 0 ,
(ii) ∆ nın Pi
köşesinin karşı kenarının normalinin timelike olması için gerek ve
yeter şart M ii > 0 olmasıdır.
101
Đspat
∑M
⟨ui , Pk ⟩ =
ij
⟨ Pi , Pk ⟩
−ε i M M ii
M δ ik
=
−ε i M M ii
(6.1)
ve
⟨ui , Pk ⟩ ≤ 0 , k = 1, 2,3 .
Yani ⟨ui , Pi ⟩ = M < 0 ve ⟨ui , Pk ⟩ = 0 , k ≠ i , k = 1, 2,3 . O halde ui , ∆ nın bir dış
normalidir.
∑M
⟨ui , uk ⟩ =
ij
⟨uk , Pj ⟩
−ε i M M ii
Eş. 6.1 kullanılarak
∑M
⟨ui , uk ⟩ =
−ε i M M ii
−ε k M M kk
M M ik
=
2
ε iε k M M ii M kk
=
− M ik
ε iε k M ii M kk
ve k = i iken
⟨ui , ui ⟩ =
M δ jk
ij
− M ii
M ii
, k = 1, 2,3
(6.2)
102
(i) ui nin spacelike olması için gerek ve yeter şart M ii < 0 olmasıdır.
(ii) ui nin timelike olması için gerek ve yeter şart M ii > 0 olmasıdır.
6.9. Teorem
M , ∆ nın ayrıt matrisi M ii , M nin i-yinci minörü ve
ui = ∑ M ij Pj
olmak üzere ui , ∆ nın i-yinci ayrıtının null normal vektörü olması için gerek ve yeter
şart M ii = 0 olmasıdır.
Đspat
⟨ui , Pk ⟩ = ∑ M ij ⟨ Pj , Pk ⟩ , k = 1, 2,3
= ∑ M ij mkj
= M δ ik , k = 1, 2,3
(6.3)
Eş. 6.3 den ⟨ui , Pi ⟩ = M < 0
ve
⟨ui , Pk ⟩ = 0 , k ≠ i , k = 1, 2,3 olduğundan ui ∆ nın Pi köşesinin karşısındaki ayrıtın
normalidir.
⟨ui , uk ⟩ = ∑ M ij ⟨ Pj , uk ⟩ (Eş. 6.1 den)
= ∑ M ij M δ kj
103
= M M ik
ve
⟨ui , ui ⟩ = M M ii
(6.4)
Eş. 6.4 den
ui null olması için gerek ve yeter şart M ii = 0 .
6.2. Sonuç
M , P1 , P2 , P3 köşeli ∆ nın ayrıt matrisi ve ui , ul de, sırası ile, Pi ve Pl köşelerinin
karşısındaki kenarların null ve spacelike dış birim normalleri olmak üzere;
⟨ui , ul ⟩ = −
M
M ll
M il , i ≠ l .
Đspat
Teorem 6.8 ve Teorem 6.9 dan
ul =
∑M
lj
Pj
j
M M ll
ve
ui = ∑ M ij Pj .
j
104
⟨ui , ul ⟩ = ∑ M ij ⟨ Pj , ul ⟩
(6.5)
j
Eş. 6.1 den
M δ jl
⟨ui , ul ⟩ = ∑ M ij
M M ll
j
=
M il M
M M ll
⟨ui , ul ⟩ = −
M
M ll
M il , i ≠ l
( ui null ul spacelike)
bulunur.
6.3. Sonuç
M , P1 , P2 , P3 köşeli ∆ nın ayrıt matrisi ve ui , ul de sırası ile Pi ve Pl köşelerinin
karşısındaki kenarların null ve timelike dış birim normalleri olsun.
⟨ui , ul ⟩ = −
−M
M ll
M il , i ≠ l .
Đspat
Teorem 6.8 ve Teorem 6.9 dan açıktır.
6.4. Sonuç
M , ∆ nın ayrıt matrisi ve ui , ul de ∆ nın sırası ile Pi ve Pl köşelerinin karşısındaki
spacelike ve timelike kenarların dış birim normalleri olsun. Bu durumda
105
⟨ui , ul ⟩ =
− M il
M ll ( − M ii )
, i≠l.
Đspat
Teorem 6.8 in (i) ve (ii) şıkları kullanılarak yapılır.
6.5. Sonuç
M , ∆ nın ayrıt matrisi ve ui , ul de ∆ nın Pi ve Pl köşelerinin karşısındaki
kenarların spacelike dış birim normalleri ise
⟨ui , ul ⟩ =
− M il
, i≠l.
M ii M ll
Đspat
Teorem 6.8 in (i) şıkkından açıktır.
6.6. Sonuç
M , ∆ nın ayrıt matrisi ve ui , ul de ∆ nın Pi ve Pl köşelerinin karşısındaki
kenarların timelike dış birim normalleri ise
⟨ui , ul ⟩ =
− M il
, i≠l.
M ii M ll
Đspat
Teorem 6.8 in (ii) şıkkından açıktır.
106
6.7. Sonuç
M , ∆ nın ayrıt matrisi ve ui , ul de ∆ nın Pi ve Pl köşelerinin karşısındaki
kenarların null dış birim normalleri ise
⟨ui , ul ⟩ = M M il , i ≠ l .
Đspat
Teorem 6.9 kullanılarak gösterilir.
6.8. Sonuç
M,
0
∆30 tipinden de-Sitter üçgeni ise
δ
L = ij
− M ii
olmak üzere
− M il
%
G=
= − LML
M
M
ii
ll
dir.
Đspat
Sonuç 6.6 dan açıktır.
107
6.9. Sonuç
M , 3 ∆ 00 tipinden de-Sitter üçgeni ise
δ
L = ij olmak üzere
M ii
%
G = − LML
dir.
Đspat
Sonuç 6.5 den açıktır.
1
M
11
L120 = 0
0
1
M
11
L111 = 0
0
0
1
M 22
0
0
1
− M 22
0
1
−M
11
0 , L102 = 0
−M
0
0
0 , L300 = − M I 3 ,
−M
0
0
1
− M 22
0
0 ,
−M
0
108
−M
2
L10
= 0
0
0
1
M 22
0
1
M 11
L021 = 0
0
0
1
− M 22
0
−M
0 , L201 = 0
− M
0
0
1
− M 11
0
0 , L12
= 0
1
0
M 33
0
1
− M 22
0
0
0
1
− M 22
0
0 ,
− M
0
0
1
M 33
0
null ayrıt sayısı k, spacelike ayrıt sayısı i ve timelike ayrıt sayısı j olan de-Sitter
üçgeni i ∆ kj
( i + j + k = 3)
olmak üzere yukarıdaki Lkij matrisleri i ∆ kj üçgeni esas
alınarak oluşturulmuş matrislerdir.
6.10. Teorem
M ve Lkij matrisleri i ∆ kj ( i + j + k = 3) üçgeninin sırası ile ayrıt matrisi ve yukarıdaki
matrisi olmak üzere, i ∆ kj üçgenin Gramm matrisi için
% k.
G = − Lkij ML
ij
Đspat
Sonuç 6.2 – Sonuç 6.9 kullanılıp gerekli hesaplamalar yapılarak görülür.
109
6.5. de-Sitter Uzayında Non-dejenere Ayrıtlı Üçgenlerin Alanları
6.1. Tanım
IR12 de null olmayan iki vektör olmak üzere bu vektörler arasındaki
N1 , N 2
θ ( N1 , N 2 ) açısı
(i) ⟨ N1 , N1 ⟩⟨ N 2 , N 2 ⟩ > 0 ve ⟨ N1 , N 2 ⟩ < 0 ise θ ( N1 , N 2 ) = arccos h ( −⟨ N1 , N 2 ⟩ ) ,
(ii) ⟨ N1 , N1 ⟩⟨ N 2 , N 2 ⟩ > 0 ve ⟨ N1 , N 2 ⟩ > 0 ise θ ( N1 , N 2 ) = − arccos h ( ⟨ N1 , N 2 ⟩ ) ,
(iii) ⟨ N1 , N1 ⟩⟨ N 2 , N 2 ⟩ < 0 ise θ ( N1 , N 2 ) = − arcsin h ( ⟨ N1 , N 2 ⟩ )
şeklinde tanımlanır [11].
6.2. Tanım
N1 , N 2 IR1n +1 de null olmayan ve Lorentz düzlemini geren iki vektör olmak üzere
{v ∈ IR
n +1
1
: ⟨ v, N1 ⟩ ≥ 0, ⟨ v, N 2 ⟩ ≥ 0}
dihedronunun ayrıtındaki θ12 dihedral açısı
θ12 = −θ ( N1 , N 2 )
olarak tanımlanır [11].
S12 (1)
halinde S12
üzerindeki üçgenin 2- eş boyutlu yüzü tepe noktaları olup
⟨ Pi , Pi ⟩ = 1 olduğundan non dejeneredir. 1- eş boyutlu yüzleri de ayrıtlarıdır. O halde
110
ayrıtları null olmayan üçgenlere Schlafli diferensiyel formülü uygulanabilirdir. S12 de
ayrıtları null olmayan 3 ∆ 00 , 2 ∆10 , 1 ∆ 02 , 0 ∆30 şeklinde dört farklı üçgen vardır.
6.5.1. 2 ∆10 tipinden üçgenin alanı
Şekil 6.21. 2 ∆10 tipinden üçgen
1
5
1 1
0
=
=
P1 = 0,
,
,
P
0,
0,1
,
P
,
0,
(
)
köşe noktalı 2 ∆1 tipinden de-Sitter
2
3
2
2 2
2
üçgenin kenarları
α ( t ) = 0,
cos t − sin t cos t + sin t
,
,
2
2
β ( s ) = ( sinh s, 0, cosh s ) ,
π
t ∈ 0,
4
1
s ∈ 0, arctan h
5
3 cos u − 5 sin u 2sin u 5
sin u
,
,
cos u −
,
2
2 3
3
2 3
γ ( u ) =
5
u ∈ 0, arccos
2 2
111
dir. Bunların z = 0 düzlemine izdüşümü
Şekil 6.22. D bölgesi
şeklindedir.
V2 ( ∆ ) = ∫∫ 1 + z x2 + z y2 dydx
D
ve
z = 1 + x2 − y 2
olduğundan
112
1 + 2 x2
dydx
1 + x2 − y2
V2 ( ∆ ) = ∫∫
D
−
= ∫
0
1
2
5 x + 2 −3 x 2
∫
1 + 2 x2
dy dx
2
2
1+ x − y
2
0
(6.6)
olur. Diğer taraftan bu üçgenin iç açıları
−e1
e2
1
2
0
P1 ⊗ P2 = 0
0
−e1 e2
e3
1
e
= − 1 timelike olup N 3 = −e1 ,
2
2
1
e3
P2 ⊗ P3 = 0
0
1 =
1
2
0
5
2
−e1
e2
e3
1
2
0
0
1
2
P3 ⊗ P1 =
1
<0
3
⟨ N1 , N 2 ⟩ = −
⟨ N1 , N 3 ⟩ = 0 ≤ 0
⟨ N 2 , N3 ⟩ =
5
> 0,
3
N1 = e2
N2 =
5e1 − e2 + e3
N 3 = −e1
3
e2
spacelike olup N1 = e2 ,
2
5 −1 1
5
5
1
1
=
e1 −
e2 +
e3 olup N 2 =
,
,
,
2
2 2
2 2
2 2
3
3
3
1
2
113
olur ve
N1 spacelike N 2 timelike olduğundan Tanım 6.2 den
−1
− arcsin h ( ⟨ N1 , N 2 ⟩ ) = θ12 ⇒ θ12 = − arcsin h
,
3
N1 spacelike N 3 timelike olduğundan Tanım 6.2 den
− arcsin h ( ⟨ N1 , N 3 ⟩ ) = θ13 ⇒ θ13 = arcsin h ( 0 ) = 0 ,
N 2 , N 3 timelike olduğundan Tanım 6.2 den
5
− arccos h ( ⟨ N 2 , N 3 ⟩ ) = θ 23 ⇒ θ 23 = − arccos h
3
bulunur. Teorem 2.4 den
V2 ( ∆ ) = θ12 + θ13 + θ 23 + c .
(6.7)
Eş. 6.6 daki V2 ( ∆ ) ve bu θ12 ,θ13 ,θ 23 değerlerini Eş. 6.7 de yerine yazarak
5
−1
c = V2 ( ∆ ) + arcsin h
+
arccos
h
3
3
elde edilir.
(6.8)
114
6.11. Teorem
θ12 , θ13 , θ 23 açıları 2 ∆10 üçgeninin iç açıları olmak üzere
5
1
V2 ( 2 ∆10 ) = θ12 + θ13 + θ 23 + V2 ( ∆ ) + arcsin h −
.
+ arccos h
3
3
Đspat
Eş. 6.8 i, ε = 1 halinde Eş. 2.1 de yerine yazarak görülür.
6.5.2. 1 ∆ 02 tipinden üçgenin alanı
Şekil 6.23. 1 ∆ 02 tipinden üçgen
115
Kenarları
α ( t ) = 0,
π
t ∈ 0,
4
cos t − sin t cos t + sin t
,
,
2
2
(
sinh s 2 2 cosh s − 3sinh s
β ( s ) = 3 cosh s − 2 sinh s ,
,
2
2
γ ( u ) = ( sinh u, 0, cosh u ) , u ∈ 0, log 2 + 3
(
)
(
1 1
olan P1 = 0,
,
, P2 = ( 0, 0,1) , P3 =
2 2
)
(
3, 0, 2
)
) ,
(
)
s ∈ 0, log 1 + 2
köşe noktalı
1
∆ 02 tipinden
de-Sitter üçgeni ∆ olsun. ∆ nın kenarlarının z = 0 düzlemine izdüşümünden elde
edilen Şekil 6.12 deki basit kapalı bölgeyi D ile gösterelim.
Y
1
2
- 2 x + 12 + 2 x 2
y=
2 3
D
3
Şekil 6.24. D bölgesi
X
116
V2 ( ∆ ) = ∫∫ 1 + z x2 + z y2 dydx
D
ve
z = 1 + x2 − y 2
olduğundan
1 + 2 x2
dydx
1 + x2 − y 2
V2 ( ∆ ) = ∫∫
D
−2 x +
=∫
0
3
12 + 2 x 2
∫
2 3
0
1 + 2 x2
dy dx
2
2
1+ x − y
olur. Diğer taraftan bu üçgenin iç açıları
−e1
P1 ⊗ P2 = 0
0
e2
e3
1
2
0
1
e
= − 1 timelike olup N 3 = −e1 ,
2
2
1
−e1 e2
P2 ⊗ P3 = 0
P3 ⊗ P1 =
e3
0
1 = 3e2 timelike olup N1 = e2 ,
3
0
2
−e1
e2
e3
3
0
2 = 2e1 −
1
2
1
2
0
3
3
− 3 3
e2 +
e3 olup N 2 = 2,
,
,
2
2
2
2
(6.9)
117
⟨ N1 , N 2 ⟩ = −
3
<0
2
⟨ N1 , N 3 ⟩ = 0 ≤ 0
⟨ N2 , N3 ⟩ = 2 > 0 ,
N1 = e2
N2 =
2e1 − 3e2 + 3e3
2
N 3 = −e1
olur ve
N1 , N 2 spacelike olduğundan Tanım 6.2 den
3
arccos h ( ⟨ N1 , N 2 ⟩ ) = θ12′ ⇒ θ12′ = arccos h
,
2
N1 spacelike N 3 timelike olduğundan Tanım 6.2 den
− arcsin h ( ⟨ N1 , N 3 ⟩ ) = θ13′ ⇒ θ13′ = arcsin h ( 0 ) = 0 ,
N 2 spacelike ve N 3 timelike olduğundan Tanım 6.2 den
− arcsin h ( ⟨ N 2 , N 3 ⟩ ) = θ 23′ ⇒ θ 23′ = − arcsin h
( 2)
bulunur. Teorem 2.4 den
V2 ( ∆ ) = θ12′ + θ13′ + θ 23′ + c .
(6.10)
118
Eş. 6.9 daki V2 ( ∆ ) ve bu θ12′ , θ13′ , θ 23′ değerlerini Eş. 6.10 da yerine yazarsak
3
c = V2 ( ∆ ) − arccos h
+ arcsin h
2
( 2)
(6.11)
olur.
6.12. Teorem
θ12 , θ13 , θ 23 açıları 1 ∆ 02 üçgeninin iç açıları olmak üzere
3
V2 ( 1 ∆ 02 ) = θ12 + θ13 + θ 23 + V2 ( ∆ ) − arccos h
+ arcsin h
2
( 2).
Đspat
Eş. 6.11 i, ε = 1 halinde Eş. 2.1 de yerine yazarak görülür.
119
KAYNAKLAR
1. Archimedes, “The Works of Archimedes”, edited by T.L. Heath, Cambridge Univ.
Press, Cambridge, 14-42 (1897).
2. Euler, L., “De linea brevissima in superficie quacunque duo quaelibet puncta
iungente”, Comment. Acad. Sci. Petrop, 3:110-124 (1732).
3. Menger, K., “Untersuchungen über allgemeine Metrik. Vierte Untersuchung. Zur
Metrik der Kurven”, Math. Ann., 103:466-501 (1930).
4. Karlığa, B., “Edge matrix of hyperbolic simplices”, Geom. Dedicata, 109:1–6
(2004).
5. Ratcliffe, J.G., “Foundations of Hyperbolic Manifolds”, Springer-Verlag, Berlin,
36 (1994).
6. Hacısalihoğlu, H.H., “Đki ve Üç Boyutlu Uzaylarda Dönüşümler ve Geometriler”,
A.Ü.Fen Fakültesi, Ankara, 18-43 (1998).
7. Bluemental, L., “Theory and Applications of Distance Geometry”, Chelsea
Publishing Company, New York, 97-101 (1970).
8. O’neil, B., “Semi-Riemannian Geometry”, Academic Press., London, 46-49, 5457, 108-114, 143-144 (1983).
9. Vinberg, E.B., “Geometry II, Encyclopaedia of Mathematical Sciences”,
Springer-Verlag, 4-79 (1993).
10. Yakut, A.T., “Hiperbolik Uzayda Simplekslerin Tepe Açıları”, Doktora Tezi,
Gazi Üni., 53-113 (2004).
11. Suarez-Peiro, E., “A Schlafli Differential Formula for Implices in SemiRiemannian Hyperquadrics, Gauss-Bonnet Formulas for Simplices in the de
Sitter Sphere and the Dual Volume of a Hyperbolic Simplex”, Pasicif Journal
of Mathematics, 194(1): 229 (2000).
12. Rivin, I. and Cooper, D., “Combinatorial scalar curvature and rigidity of ball
packings”, Math. Res. Lett., 3(1):51-60 (1996).
13. Berger, M., “Geometry-I”, Springer-Verlag, Berlin Heidelberg, 240-241 (1987).
120
14. Karlığa, B. And Savaş, M., “Hiperbolik ve Küresel Üçgenlerin Kenar
Uzunluklarına Bağlı Alan Formülleri”, Bölüm Semineri, Gazi Üniversitesi,
Ankara, 1-6 (2006).
15. Karlığa, B. and Yakut, A.T., “Vertex angles of a simplex in hyperbolic space
H n ”, Geom. Dedicata, 120:49-58 (2006).
16. d’Ovidio, E., “Le funzioni metriche fondamentali negli spazi di quante si
vogliano dimensioni e di curvature constante”, Mem. R. Acc. Lincei, 3(1):929986 (1877).
17. Gram, J. P. “Undersøgelser angaaende Maengden af Primtal under en given
Graeense”, Det K. Videnskabernes Selskab, 2: 183–308(1884).
18. Erikson, F., “The law of sines for tedrahedra and n-simplices”, Geometriae
Dedicata, 7: 71-80 (1978).
19. Coxeter, H. S. M., “The polytopes with regular-prismatic vertex figures II”, Proc.
London Math. Soc., 34:126-189 (1932).
20. Witt, E., “Spiegelungsgruppen und Aufz¨ahlung halbeinfacher Liescher Ringe”,
Abh. Math. Sem. Univ. , Hamburg, 14:289-322(1941).
21. Aleksandrov, A. D., “On the filling of space by polyhedra (Russian)”, Vestnik
Leningrad Univ. Ser. Mat. Fiz. Khim., 9:33-43(1954).
22. Dyck,W., “Vorlaufige Mittheilungen uber die durch Gruppen linearer
Transformationen gegebenen regularen Gebietseintheilungen des Raumes”,
Ber.Verh. Sach. Akad. Wiss. Leipzig. Math.-Phys. Kl., 61-75(1883).
23. Goursat, E., “Sur les substitutions orthogonales et les divisions regulieres de
l’espace”, Ann. Sci. Ecole Norm. Sup., 6:9-102(1889).
24. Coxeter, H. S. M., “Groups whose fundamental regions are simplexes”, J.
London Math. Soc., 6:133-136(1931).
25. Vinberg, E. B., “Discrete groups generated by reflections in Lobacevskii spaces”,
Math. USSR-Sbornik, 1:429-444(1967).
26. Hsiang, W.Y., “On the volume ormula of Spherical Simplices, revisited”,
Proceedings of GARC Workshop on Geometry and Topology '93 (Seoul, 1993),
Lecture Notes Ser., Seoul Nat. Univ. Seoul , 18: 117-127 (1993).
27. Feng, L., “On a Problem of Fenchel”, Geom. Dedicata, 64:277 (1997).
121
28. Asmus, I., “Duality Between Hyperbolic and de-Sitter Geometry”, Cornell
University, New York, 1-32 (2008).
29. Lopez, R., “Differential Geometry of Curves and Surfaces in Lorentz-Minkowski
Space”, Instituto de Matematica e Estatıstica (IME-USP) University of Sao
Paulo, Brasil, 1-4 (2008).
122
ÖZGEÇMĐŞ
Kişisel Bilgiler
Soyadı, adı
: TOKEŞER, Ümit
Uyruğu
: T.C.
Doğum tarihi ve yeri : 06.05.1978, ĐSTANBUL
Medeni hali
: Evli
Telefon
: 0 (312) 202 10 84
e-mail
: tokeser@gazi.edu.tr
Eğitim
Derece
Eğitim Birimi
Mezuniyet tarihi
Yüksek lisans
Niğde Üniversitesi /Matematik Bölümü
2005
Lisans
Ankara Üniversitesi/Matematik Bölümü 2002
Lise
Kocatepe Mimar Kemal Lisesi
Đş Deneyimi
Yıl
Yer
Görev
2002-2006
Niğde Üniversitesi
Araştırma Görevlisi
2006-
Gazi Üniversitesi
Araştırma Görevlisi
Yabancı Dil
Đngilizce
Hobiler
Tenis, Bilgisayar teknolojileri, Basketbol
1996