U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
DOĞRU AKIM MOTOR KONTROL MODLARI [8]
Şekil 1. DA Motor Çalışma Modları [8]
Doğru akım motorlarının hızı aşağıdaki üç yaklaşımdan bir tanesi ile yapılabilir:
a) Endüvi gerilim değerini kontrol ederek
b) Uyarma akım değerini kontrol ederek
c) Momentle orantılı olan endüvi akımını kontrol ederek
Nominal hızın altında "a" yöntemi ile, nominal hızın üstünde "b" yöntemi ile motor hız kontrolü
gerçekleştirilir.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
DOĞRU AKIM MOTORU "ÇALIŞMA MODLARI" [8]
DA motor çalışma modları aşağıda anlatılmıştır. Bir DA motoru bir ya da daha fazla modda çalışabilir.
1) Motor çalışma modu
Şekil 1(a)'da motor çalışma modu gösterilmiştir. Bu modda, zıt EMK değeri (Eg), kaynak gerilimi (Va)
değerinden düşüktür. Endüvi ve uyarma akımları pozitif değerdedir. Bu modda, motor yükü tahrik
etmek için moment üretecektir.
2) Geri kazanımlı frenleme
Şekil 1(b)'de bu moda ilişkin devre şeması gösterilmiştir. Motor, bu modda, generatör gibi davranır.
Endüklenen gerilim (Eg), kaynak gerilimi (Va) değerinden büyük olmalıdır. Endüvi akımı negatif, uyarma
akımı ise pozitiftir. Bu modda, motorun kinetik enerjisi kaynağa geri yollanır. Eğer DA motoru olarak
seri motor kullanılmış ise, seri motorlar genellikle kendinden uyartımlı generatör gibi kullanılır.
Kendinden uyartım için uyarma akımının kalıcı akıyı destekleyici yönde uyarma devresinden akması
gerekir. Bunun için ise endüvi ya da uyartım uçlarının terslenmesi gerekir.
3) Dinamik frenleme
Şekil 1(c)'de bu moda ilişkin devre şeması gösterilmiştir. Motor, bu mod, geri kazanımlı frenleme
moduna benzer. Farklı olan yönü ise, kaynak gerilimi (Va) değerinin, frenleme direnç değeri (Rb) yardımı
ile değiştirilmesidir. Motorun sahip olduğu kinetik enerji, kaynağa geri verilmek yerine Rb direnci
üzerinde harcanır.
4) Ters akımla frenleme
Şekil 1(d)'de bu moda ilişkin devre şeması gösterilmiştir. Bu mod, diğer bir frenleme yöntemidir. Bu
modda, endüklenen gerilim (Eg) ve kaynak gerilimi (Va) aynı yönde etkili olurlar, endüvi akım yönü ters
döner ve bu nedenle bir frenleme momenti üretilir. Uyarma akımı pozitiftir. DA motoru olarak seri
motor kullanılıyor ise ya endüvi ya da uyarma sargı uçları ters çevrilir, ama iki sargı ucu, aynı anda ters
çevrilmez.
DÖRT BÖLGELİ ÇALIŞMA
Şekil 2'de, serbest uyartımlı DA motor için kaynak geriliminin, zıt EMK değerinin ve endüvi akımının
çeşitli çalışma durumlarındaki polariteleri gösterilmiştir. 1. bölgede (ileri yönde motor çalışma), Va,Eg
ve Ia pozitif yöndedir. Moment ve hız da pozitif yöndedir.
2. bölgede (ileri yönde frenleme bölgesinde ise) motor hızı ve Eg pozitif yönde kalmaya devam ederken,
momentin negatif olması ve enerji akış yönünün ters dönmesi için endüvi akımının negatif olması
gerekmektedir. Bu hedefe ulaşmak için ise Va
değeri düşürülür.
< Eg şartının sağlanması gerekir. Diğer bir ifade ile Va
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 2. DA motorda dört bölgeli çalışma modları [8]
3. bölgede (ters yönde motor çalışma), Va, Eg ve Ia negatif yöndedir. Moment ve hız da negatif
yöndedir. Momentin negatif kalması ve enerji akışının motordan kaynağa doğru gerçekleşmesi için
|Va|> |Eg| şartının sağlanması gerekir. Eg 'nin polaritesini değiştirmek için uyarma akımının yönünü
yada endüvi uçlarının bağlantısını ters çevirmek gerekir.
4. bölgede (frenleme bölgesi), motor ters yönde döner. Va ve Eg negatif yöndedir. Momentin pozitif
olması ve enerji akışının motordan kaynağa doğru gerçekleşmesi için, endüvi akımı pozitif olmalıdır.
Bunun için ise, |Va| < |Eg| şartının sağlanması gerekir.
BİR FAZLI AA KAYNAĞINDAN BESLENEN DA MOTOR SÜRÜCÜLERİ [8]
Şekil 3'de serbest uyartımlı DA motorunun endüvi ve uyarma devresi gösterilmiştir. Endüvi gerilimi,
endüvi devresini besleyen doğrultucunun αa tetikleme açısı değiştirilerek ayarlanabilir. Düşük
tetikleme açısında endüvi akımı kesikli olabilir ve bu durum motor kayıplarını arttırabilir. Genellikle,
endüvi devresine seri olarak bağlanan Lm endüktansı yardımı ile akımdaki dalgalanma kabul edilebilir
değerlere indirilebilir. Uyarma devresindeki doğrultucunun αf tetikleme açısı değiştirilerek uyarma
devresi akım değeri kontrol edilir. DA motorunu belirli bir modda çalıştırmak için, genellikle, endüvi
yada uyarma sargı uçlarını (kontaktör kullanarak) ters çevirmek için Şekil 4(a) ve Şekil 4(b)'deki bağlantı
şekilleri kullanılabilir. Endüktif gerilim atlamalarını önlemek için, sargı ucu değiştirme işlemi endüvi
akımının sıfır olduğu anda yapılır. Sıfır endüvi akım değerini garanti etmek için akımın sıfır olduğu an ile
tetikleme anı arasında 2 ms ile 10 msn arasında ölü bir zaman dilimi bırakılır. Aynı işlem uyarma
devresinde yapılmak istendiğinde ise, uyarma devresi endüktans değeri çok daha yüksek olduğundan,
ölü zaman dilimi çok daha fazla olmalıdır. Uyarma devresinde kullanılan doğrultucu yarı kontrollü köprü
doğrultucu olması teorik olarak mümkün olsa da, pratikte, tam kontrollü köprü doğrultucu kullanılır.
Bunun temel nedeni ise, bu devrede gerilim yönü ters çevrilebildiğinden, uyarma akımının yönünün
çok daha hızlı bir şekilde ters döndürülebilmesidir.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Yarım kontrollü köprü dönüştürücülerde (Şekil 5) akımları genellikle kesintili olduğundan piyasada
tercih edilmezler. Kullanıldığında, sadece 1. bölgede (ileri yönde motor çalışma) ve 15 kW'a kadar olan
uygulamalarda tercih edilir. Tam denetimli ve çift dönüştürücülü çeviriciler ise daha yaygın kullanılır.
Hem endüvi devresi hem de uyarma devresinin aynı AA şebekeden beslendiği kabulü ile ortalama
endüvi gerilimi;
Va
Vm
(1 cos a )
; 0 a
olurken, uyarma sargısının ortalama gerilim değeri;
Vf
Vm
(1 cos f )
; 0 f
olacaktır. Yukarıdaki ifadelerde Vm; Bir fazlı AA şebeke geriliminin tepe (max) değeridir.
Bir fazlı tam kontrollü köprü doğrultucular (Şekil 6), DA motor sürme devresinde 15 kW'a kadar olan
güçlerde kullanılırlar. Şekil 2'de gösterilen 4 bölge içinde, üstte yar alan 2 bölgede (ileri yönde motor
ve ileri yönde frenleme) çalıştırılırlar. Hem endüvi devresi hem de uyarma devresinin aynı AA
şebekeden beslendiği kabulü ile ortalama endüvi gerilimi;
U.Arifoğlu
Va
Güç Elektroniği Devreleri Ders Notu
2Vm
cos a
; 0 a
olurken, uyarma sargısının ortalama gerilim değeri;
Vf
2Vm
cos f
; 0 f
olacaktır. Endüvideki doğrultucu çıkışında Va ve - Va gerilim değerleri üretilebildiğinden dolayı, DA
motorun, 1. ve 4. bölgede çalıştırılması mümkündür. Motordaki kinetik enerjiyi şebekeye geri
döndürebilmek için, uyarma akımının yönü değiştirilerek, motorun zıt EMK değerinin ( Ea ) yönü ters
çevrilir. Endüvi akımının ters çevrilebilmesi, DA motorun, 2. ve 3. bölgelerde çalıştırılmasına olanak
verir.
Şekil 5. Bir fazlı yarı kontrollü doğrultucu ile DA motor hız kontrol devresi [8]
Şekil 6. Bir fazlı tam kontrollü doğrultucu ile DA motor hız kontrol devresi [8]
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 7. Bir fazlı AA şebekesinden beslenen çift dönüştürücülü sürücü [8]
İki adet tek fazlı tam dalga doğrultucudan beslenen DA motor sürücü devresi Şekil 7'de gösterilmiştir.
Sol taraftaki doğrultucu pozitif bir endüvi gerilimi ( Va ) üretmek, sağ taraftaki doğrultucu ise negatif
endüvi (- Va ) gerilimi üretmek için kullanılır. Sol taraftaki çevirici 1. ve 2. bölgelerde, sağ taraftaki
çevirici ise 3. ve 4. bölgelerde görev alır. Şekil 7'de verilen devre DA motorun 4 bölgeli hız kontrolü için
kullanılabilir. 15 kW'a kadar güçlerde kullanılabilir. Uyarma devresi ise, yarım kontrollü köprü, tam
kontrollü köprü ya da çift dönüştürücülü devre olabilir.
Şekil 7'de sol taraftaki dönüştürücü a1 tetikleme açısı ile çalışır. Bu doğrultucu için ortalama endüvi
gerilimi;
Va
2Vm
cos a1 ; 0 a1
olur. Şekil 7'de sağ taraftaki dönüştürücü a2 tetikleme açısı ile çalışır. Bu doğrultucu için ortalama
endüvi gerilimi;
Va
2Vm
cos a2 ; 0 a2
olur. a1 ve a2 tetikleme açıları arasında;
a2 π- a1
ilişkisi geçerlidir. Eğer uyarma devresi tam kontrollü köprü doğrultucu ile kontrol ediliyor ise uyarma
devresinin ortalama gerilim değeri;
Vf
2Vm
cos f ; 0 f
olacaktır. Motorun viskoz sürtünme ve boşta çalışma kayıpları ihmal edilebilir. Endüvi ve uyarma
devrelerinin endüktansları, endüvi ve uyarma akımlarını sürekli ve düzgün yapacak kadar büyük olduğu
kabulü ile hesaplamalar yapılabilir.
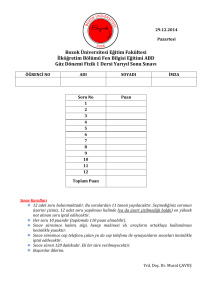
Problem 1
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Serbest uyarmalı bir DA motorunun endüvisi, bir fazlı yarım kontrollü köprü doğrultucu tarafından
kontrol edilmektedir. Uyarma akımı nominal değerindedir. Doğrultucu mevcut alçak gerilim
şebekemize bağlanmış durumdadır. Endüvi direnç değeri; Ra 0.3 , uyarma sargı direnç değeri;
Rf 150 , motor gerilim sabiti; K v 0.7(V / A rad / sn) değerindedir. Yük moment değeri 1500 rpm
için TL= 45N.m değerindedir. Motorun viskoz sürtünme ve boşta çalışma kayıpları ihmal edilmektedir.
Endüvi ve uyarma devrelerinin endüktanslarının, endüvi ve uyarma akımlarını sürekli ve düzgün
yapacak kadar büyük olduğu kabulü yapılarak; a) Uyarma akımı ortalama değerini, b) a değerini, c)
Hem endüvi devresindeki (tam kontrollü köprü) doğrultucu hem de uyarma devresindeki (tam
kontrollü köprü) doğrultucu mevcut şebekeden beslendiğine göre, her iki doğrultucunun şebekeden
çektiği aktif güce ilişkin güç faktörünü hesaplayınız.
Çözüm
Vs 220V , Vm 220
Vm
(1 cos f )
a) Vf
Vf
2 311V ,w=1500*π/30=157.08 rad/sn
ifadesinde, nominal uyarma akımında
f 0o alınmalıdır. Buna göre;
Vf 198
2Vm 2 * 311
1.32A
198V ; If
R f 150
b) I a
Td
.A
K v I f . *.
Eg Kv wIf 0.7 * 157.08 * 1.32 145.14V
Va Eg IaRa 145.14 48.7 * 0.3 159.75 V
Va
Vm
311
(1 cos a )
(1 cos a ) 159.75V a 52.14o
c) Endüvi akımının düzgün olduğu kabulü ile, doğrultucu çıkış güç değeri;
Pa VaIa 159.75 * 48.7 7779.82 W
olarak bulunur. Endüviyi besleyen doğrultucudaki kayıplar ihmal edilirse, şebekeden çekilen aktif güç
değeri; Ps Pa 7779.82 W
olacaktır. Şekil 5(c)'den; endüviyi besleyen doğrultucunun şebekeden çektiği akımın etkin değeri;
Is (
2 2
2 2
a 0.5
0.91 0.5
0.5
0.5
) Ia (
) 41.035A
is (wt)dwt ) (
ia (wt)dwt ) Ia (
2 a
2 a
olarak bulunur. Doğrultucunun şebekeden çektiği akımın harmonikleri ihmal edilirse;
Ps Pa 7779.82 W VsIs cos s 220 * 41.035* cos s s 30.48o ;
Problem 2
cos s 0.86 olur.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Serbest uyarmalı bir DA motorunun hem endüvisi hem de uyarma devresi, bir fazlı tam kontrollü köprü
doğrultucu tarafından kontrol edilmektedir. Uyarma akımı nominal değerindedir. Doğrultucu mevcut
alçak gerilim şebekemize bağlanmış durumdadır. Endüvi direnç değeri; Ra 0.3 , uyarma sargı direnç
değeri; Rf 150 , motor gerilim sabiti; K v 0.7(V / A rad / sn) değerindedir. Yük momentine karşı
gelen endüvi akımı ortalama değeri Ia 50A olarak verilmiştir. Motorun viskoz sürtünme ve boşta
çalışma kayıpları ihmal edilmektedir. Endüvi ve uyarma devrelerinin endüktanslarının, endüvi ve
uyarma akımlarını sürekli ve düzgün yapacak kadar büyük olduğu kabulü yapılmaktadır. Endüvi
devresini besleyen doğrultucunun tetikleme açısı
a 55o olduğuna göre; a) DA motoru tarafından
üretilen moment değerini (Td), b) motora ilişkin açısal hız (w) değerini, c) Endüviyi besleyen
doğrultucunun giriş güç katsayısını bulunuz.
Çözüm
a) Vf
2Vm
cos f
ifadesinde, nominal uyarma akımında
f 0o alınmalıdır. Buna göre;
Vf 198
1.32A
Vf 198V ; If
Rf
150
bulunur. DA motor tarafından üretilen moment değeri;
Td TL KVIfIa 0.7 * 1.32 * 50 46.2 N.m
olur. DA motorun endüvi gerilimi ortalama değeri ise;
Va
2Vm
2 * 311
cos a1
cos 55o 113.56 V
olacaktır. DA motorun zıt EMK değeri;
Eg Va IaRa 113.56 50 * 0.3 98.56V
olarak bulunur.
b) w
Eg
K v If
.
106.66 * 30
. rad/sn ; w
1018.52 dev/dak (rpm)
. *.
c) Doğrultucu devrelerdeki kayıplar ihmal edilirse, her iki doğrultucunun mevcut şebekeden çektiği aktif
güç değeri toplamı;
Ptop VaIa VfIf 113.56 * 50 198 * 1.32 5939.36 W
olacaktır. Şekil 6(c )'de, oldukça endüktif bir doğrultucu için şebekeden çekilen ani akıma ilişkin etkin
akım değeri;
Isa Ia 50A
olurken, uyarma devresini besleyen tam kontrollü doğrultucu için ise şebekeden çekilen akımın etkin
değeri;
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Isf Isf 1.32A
olacaktır. Her iki doğrultucunun mevcut şebekeden çektiği etkin akım değeri ise;
2
Is ( i2s (wt)dwt i2f (wt)dwt )
2 55o
0o
1/2
I2a I2f 50.017 A
olacaktır. Dalgalanmalar ihmal edildiğinde, devrenin güç faktörü aşağıdaki gibi hesaplanır:
Ps Pa Pf VsIs cos s 5939.36 W 220 * 50.017 * cos s cos s 0.54
Problem 3
Problem 2'de verilen çalışma şartlarında, uyarma akımının yönü değiştirilerek, motorun zıt EMK
polaritesi değiştirildiğinde, a) Endüvi akımının Ia 45A değerinde sabit tutacak olan endüvi devresi
doğrultucusunun tetikleme açısı a değeri ne olmalıdır? b) DA motorunun geri kazanımlı
frenlenmesinden dolayı kaynağa geri döndürülen aktif güç değerini bulunuz.
Çözüm
a) Problem 2'de Eg 98.56V bulunduğuna göre, yeni çalışma koşulunda;
Eg 98.56V
olacaktır. Bu durumda endüvi gerilimi ortalama değeri;
Va Eg IaRa 98.56 45 * 0.3 85.06 V
olacaktır. Tam kontrollü köprü doğrultucu için daha önce verilen eşitlikten;
Va
2Vm
2 * 311
cos a 85.06
cos a a 115.44o
elde edilir.
b) Kaynağa geri yollanan aktif güç değeri (doğrultucu kayıpsız kabul edilmektedir):
Pa Va I a . * . W
Not: Motor, şebekeye güç bastıkça, motorun hızı ( gerçek çalışma şartlarında ) azalacaktır.
Bunun sonunda, (zıt EMK) E g değerinin de azalması kaçınılmazdır. Eğer şebekeye güç basılması
sırasında, sürekli olarak Ia 45A değerinin sabit tutulması arzu edilirse, endüvi akımının
sabit, fakat tetikleme açısının sürekli olarak değiştirildiği bir kapalı çevrim kontrolüne ihtiyaç
duyulacaktır.
ÜÇ FAZLI AA KAYNAĞINDAN BESLENEN DA MOTOR SÜRÜCÜLERİ
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 8. Yarım kontrollü köprü doğrultucu
Eğer, DA motorunun endüvi devresi, 3 fazlı bir şebekeye, yarım kontrollü bir köprü doğrultucu
üzerinden bağlanırsa (Şekil 8), uyarma akım yönü değiştirilmediği takdirde, bir bölgede çalışır ve 115
kW'a kadar DA motorlarının hız kontrolünde çalıştırılır. Uyarma devresi ise üç fazlı şebekeye, üç fazlı
yarım kontrollü bir başka doğrultucu üzerinden bağlanırsa, DA motor endüvi geriliminin ortalama
değeri ( Vm ; faz-nötr geriliminin tepe değeri olmak üzere);
Va
3 3Vm
(1 cos a ) ; 0 a
2
olarak hesaplanırken, uyarma devresi ortalama gerilim değeri ise;
Vf
3 3Vm
(1 cos f ) ; 0 f
2
olacaktır.
Şekil 9. Tam kontrollü köprü doğrultucu
Eğer, DA motorunun endüvi devresi, 3 fazlı bir şebekeye, tam kontrollü bir köprü doğrultucu üzerinden
bağlanırsa (Şekil 9), uyarma akım yönü değiştirilmediği takdirde, iki bölgede çalışır ve 1500 kW'a kadar
DA motorlarının hız kontrolünde kullanılır. Uyarma devresi ise üç fazlı şebekeye, üç fazlı tam kontrollü
bir başka doğrultucu üzerinden bağlanırsa, DA motor endüvi geriliminin ortalama değeri;
Va
3 3Vm
cos a ; 0 a
olarak hesaplanırken, uyarma devresi ortalama gerilim değeri ise;
Vf
3 3Vm
cos f ; 0 f
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
olacaktır.
Eğer, iki adet üç fazlı tam kontrolü köprü doğrultucu, bir DA motorunun endüvi devresine, Şekil 10'da
gösterildiği gibi (üç fazlı çift köprülü doğrultucu üzerinden) bağlanırsa, uyarma akım yönü
değiştirilmediği takdirde, sol taraftaki çevirici pozitif endüvi gerilimini ( Va ) üretmek için, sağ taraftaki
çevirici ise negatif endüvi gerilimini (- Va ) üretmek için kullanılır. Bu hali ile devre, 4 bölgeli ve 1500
kW'a kadar DA motorlarının hız kontrolünde kullanılabilir. Sol taraftaki (Şekil 10) doğrultucudan
beslenildiğinde, DA motor endüvi geriliminin ortalama değeri;
Va
3 3Vm
cos a1 ; 0 a1
olarak hesaplanırken, sağ taraftaki
geriliminin ortalama değeri;
Va
(Şekil 10) doğrultucudan beslenildiğinde, DA motor endüvi
3 3Vm
cos a2 ; 0 a2
olur. Uyarma devresi de üç fazlı şebekeye, üç fazlı tam kontrollü bir başka doğrultucu üzerinden
bağlanırsa, uyarma devresi ortalama gerilim değeri ise aşağıdaki gibi olacaktır:
Vf
3 3Vm
cos f ; 0 f
Şekil 10.Üç fazlı çift köprülü doğrultucu [8]
Problem 4
Serbest uyarmalı bir DA motorunun endüvisi ve uyarma devresi, ayrı ayrı, üç fazlı yarım kontrollü köprü
doğrultucular tarafından kontrol edilmektedir. Doğrultucu, mevcut 3 fazlı (yıldız bağlı) alçak gerilim
şebekemize bağlanmış durumdadır. Uyarma akımı nominal değere ayarlanmış durumdadır. DA
motorun nominal gücü 25 HP, endüvi nominal gerilimi 250 V, motorun nominal hızı ise 1500 rpm dir.
(1HP=746 W)
Endüvi direnç değeri; Ra 0.3 , uyarma sargı direnç değeri; R f 250 , motor gerilim sabiti;
K v 1.4(V / A. rad / sn) değerindedir. Yük momentine karşı gelen endüvi akımı ortalama değeri
Ia 50A olarak verilmiştir. Motorun viskoz sürtünme ve boşta çalışma kayıpları ihmal edilmektedir.
Endüvi ve uyarma devrelerinin endüktanslarının, endüvi ve uyarma akımlarını sürekli ve düzgün
yapacak kadar büyük olduğu kabulü yapılmaktadır. a) DA motorun nominal hızında, nominal güç
üretirken, endüvi devresini besleyen doğrultucunun tetikleme açısı a değerini hesaplayınız. b) a
şıkkında bulunan tetikleme açı değerinin geçerli olduğu durumda, motor yüksüz durumda çalışırken,
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
endüvi akımı nominal akım değerinin %15' i kadar olduğuna göre, yüksüz durumda motor hızını
bulunuz. c) Motorun,
wo wn
formülü ile verilen hız regülasyonunu bulunuz.
wn
Çözüm
a) Vf 3 3Vm cos f 3 3 * 220 * 2 cos 0 514.6V
If
Vf 514.6
2.06A
Rf
250
Ia In
Pn 25 * 746
74.6A
Vn
250
Eg K vIf w 1.4 * 2.06 *
(n indisi, nominal değeri göstermektedir)
1500 *
453.017 V
30
Va Eg IaRa 453.017 74.6 * 0.3 475.397 V
Va 475.397
3 3 * 220 * 2
cos a a 22.5o
b) Ia 0.15*In 0.15* 74.6 11.2A
Ego Va IaRa 475.017 11.2 * 0.3 471.657 V
Boşta çalışma hızı;
wo
Ego
KvIf
471.657
163.54 rad/sn = 163.54*30/π= 1561.71 dev/dak (rpm)
1.4 * 2.06
c) Hız regülasyonu =
w o w n . * /
. %.
wn
* /
Problem 5
Serbest uyarmalı bir DA motorunun endüvisi ve uyarma devresi, ayrı ayrı, üç fazlı yarım kontrollü köprü
doğrultucular tarafından kontrol edilmektedir. Doğrultucu, mevcut 3 fazlı (yıldız bağlı) alçak gerilim
şebekemize bağlanmış durumdadır. Uyarma akımı nominal değere ayarlanmış durumdadır. DA
motorun nominal gücü 25 HP, endüvi nominal gerilimi 250 V, motorun nominal hızı ise 1000 rpm dir
(1HP=746 W).
Endüvi direnç değeri; Ra 0.3 , uyarma sargı direnç değeri; R f 250 , motor gerilim sabiti;
K v 1.4(V / A. rad / sn) değerindedir. Yük momentine karşı gelen endüvi akımı ortalama değeri
Ia 50A olarak verilmiştir. Motorun viskoz sürtünme ve boşta çalışma kayıpları ihmal edilmektedir.
Endüvi ve uyarma devrelerinin endüktanslarının, endüvi ve uyarma akımları sürekli ve düzgündür.
a) DA motorun nominal uyarma akımında çalıştırıldığı durumda hızı 1000 rpm ise, motorun 100 N.m
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
tork ürettiği kabulü ile, endüviyi besleyen tam kontrollü doğrultucunun a tetikleme açısını bulunuz.
b) DA motorun nominal uyarma akımında çalıştırıldığı durumda hızı 1000 rpm ise, motorun 100 N.m
tork ürettiği ve endüviyi besleyen tam kontrollü doğrultucunun tetikleme açısını a 0 için, motorun
w hızını bulunuz. c) b şıkkındaki tüm değerler geçerli iken, motorun hızı 2000 rpm olursa, uyarma
devresi akımını kontrol eden tam kontrollü doğrultucunun f tetikleme açı değerini bulunuz.
Çözüm
Vf 514.6
2.06A
a) Vf 3 3Vm cos f 3 3 * 220 * 2 cos 0 514.6V ; If
Rf
250
w
1000 *
104.72 rad/sn ;
30
Ia
Td
100
34.67A
K vIf 1.4 * 2.06
Eg KvIf w 1.4 * 2.06 * 104.72 302 V
Va Eg IaRa 302 34.67 * 0.3 312.41 V
Va 312.41
3 3 * 220 * 2
cos a a 52.62o
b) a 0 için, Va 3 3Vm cos a 3 3 * 220 * 2 cos 0 514.6V
Eg Va IaRa 514.6 34.67 * 0.3 504.2 V
w
c) w
Eg
KvIf
504.2
174.82 rad/sn veya w= 1669.4 rpm
1.4 * 2.06
2000 *
209.43 rad/sn
30
Eg 504.2 Kv wIf 1.4 * 209.43 * If If 1.719 A
If
Vf Vf
1.719A Vf 429.75 V
Rf 250
Vf 429.75
3 3Vm
3 3 * 220 * 2
cos f
cos f f 33.37o
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 11.Tek fazlı çift köprülü doğrultucu [8]
Problem 6
Şekil 11'de verilen tek fazlı çift köprülü doğrultucu mevcut bir fazlı AA şebekemizden beslenmektedir.
Yük direnci R=10 ohm, sirkülasyon endüktansı Lr=40 mH, tetikleme açıları α1=60o, α2=120o dir.
Sirkülasyon akımı tepe değerini ve "1" numaralı (sol) doğrultucunun tepe akımını hesaplayınız.
Çözüm
w=2π50=314 rad/s. ; Vm=220
V;
için sirkülasyon akımı tepe değeri;
I max
r
Vm
.
( cos )
( .) . A
wL r
* .
olur. Yük akımının tepe değeri ise;
Ip
Vm
. A
R
olur. Buna göre 1 numaralı doğrultucunun tepe akımı;
I max
I p =24.77+31.11=55.88 A olacaktır.
r
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
BİR FAZLI KONTROLSÜZ KÖPRÜ DOĞRULTUCUDA KAYNAK SELF ETKİSİ (KOMUTASYON OLAYI)
(a)
Şekil 1
(b)
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 2
A-B zaman aralığında komutasyon olayının incelenmesi ( 0≤wt≤ϒ )
İnceleme sürekli hal koşulları altında yapılacaktır. Şekil 1(a)'da, bir fazlı (kaynak selfli) kontrolsüz köprü
doğrultucu devresi, Şekil 1(b)'de ise bu devrenin, bir başka biçimde gösterimi verilmiştir. wt=0 anından
az önce, D3 ve D4 diyodları üzerinden i L (wt ) I L sabit yük akımı akmaktadır. wt>0 anında, VAK 0
olduğu için, D1 ve D2 diyotları da devreye girecektir. Kaynak selfinden akan akım wt=0 anında ani olarak
yön değiştiremeyeceği için (lenz yasası), D3 ve D4 diyotlarının anot-katot gerilim değerleri VAK 0
olsa bile, 0≤wt≤ϒ aralığında akım akıtmaya devam edeceğinden, A-B zaman aralığında (komutasyon
aralığı), devredeki tüm diyodlar iletimde kalmaya devam edecektir. Bu zaman diliminde, 4 adet diyod
iletimde olduğundan, yük uçlarındaki gerilim değeri sıfır değerini alacaktır ( Vyük(wt) 0 ). Şekil 2'de,
[0 ; 2π] aralığında, alt alta ve sırası ile; yük gerilimi değişimi, kaynak selfinin uçları arasındaki gerilim
değişimi ve kaynak akımının değişimi verilmiştir.
0≤wt≤ϒ aralığında, kaynak,kaynak selfi ve yükü içeren çevre boyunca kirchhoff gerilim yasası uygulanır
ise, Şekil 2'de, ikinci satırda yer alan kaynak selfinin gerilim değişimi elde edilir.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 3
0≤wt≤ϒ aralığında, devredeki tüm diyot akımlarının ve kaynak akımının değişimini bulmak için, Şekil
3'de verilen devreden yararlanılacaktır. Şekil 3'de verilen devrede, üç adet çevre yardımı ile arzu edilen
akım değişimleri elde edilebilir. Şekil 3'de D1 ve D3 diyotların içeren birinci çevre akım yönü (i k (t )) saat
dönüş yönünde alınmıştır. D2 ve D4 diyodlarını içeren ikinci çevre akım yönü (i k (t )) ise saat dönüş
yönünün tersi alınmıştır. Üçüncü çevre ise D4, kaynak selfi, D3 diyodu, kaynak ve yükü içeren çevre
olup, çevre akımı saat dönüş yönünde ve değeri i L (wt ) I L sabit olacaktır. Bu üç adet çevreden (4
adet diyodunda iletimde olduğu hatırlanarak ve (diyotlara ilişkin dal akımları, çevre akımları cinsinden
yazılarak);
i D1 (wt ) i D2 (wt ) i k ( wt )
i D3 (wt ) i D4 (wt ) I L i k (wt )
elde edilir. A-B aralığında, kaynak akımı (dal akımı) ise her üç çevre akımı kullanılarak;
i s (wt ) 2i k (wt ) I L
yazılabilir.
Her 4 diyodunda iletimde olduğu ilk wt=0 anında, i k (wt 0)) 0 olacağından;
i D1(wt 0) i D2 (wt 0) i k (wt 0) 0
i D3 (wt 0) i D4 (wt 0) I L i k (wt 0) I L
0
i s ( wt 0) 2i k ( wt 0) I L I L
olacaktır.
Her 4 diyodunda iletimde olduğu son an olan wt=ϒ anında, ( i D1 i D2 I L i k olduğu için)
i k (wt )) I L olacağından;
i D1(wt ) i D2 (wt ) i k (wt ) I L
i D3 (wt ) i D4 (wt ) I L i k (wt ) 0
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
I
L
i s ( wt ) 2i k ( wt ) I L I L
yazılabilir.
i s ( wt ) kaynak akımının, komutasyon başlangıç ve bitimindeki değerleri belli olduğuna göre, birinci
çevreye kirchhoff gerilim yasası uygulanırsa;
wL s
d(i s ( wt ))
Vs ( wt ) 2Vsm sin wt
dwt
i s ( wt )
2Vsm cos wt
C
wL s
wt=0 için is (wt 0) I L olduğu bilindiğine göre, kaynak akım değeri ise;
i s ( wt )
2Vsm cos 0
2Vsm
C I L C I L
wL s
wL s
i s ( wt )
2Vsm cos wt
2Vsm
IL
wL s
wL s
i s ( wt )
değeri kullanılarak;
2Vsm
(1 cos wt ) I L
wL s
wt=ϒ için, i s (wt ) I L değerini alacağından, is () 2Vsm (1 cos ) I L I L , komutasyon açısı;
wL s
cos 1
2wL s
2 Vsm
IL
olarak elde edilir. Kaynak akım değişimi belli olduğuna göre, i k (wt ) çevre akımı;
i s (wt ) 2i k (wt ) I L
eşitliği yardımı ile;
i k ( wt ) 0.5i s ( wt ) 0.5I L
2Vsm
(1 cos wt )
2wL s
olacaktır. Buna göre diyod akım değişimleri ise;
i D1 ( wt ) i D2 ( wt )
2Vsm
(1 cos wt )
2wL s
i D3 ( wt ) i D4 (wt ) I L
2Vsm
(1 cos wt )
2wL s
olacaktır.
C-D zaman aralığında komutasyon olayının incelenmesi ( π ≤ wt ≤ π+ϒ )
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 4
Şekil 4'de görülen devrede, wt=π+ϒ anından az önce, D1 ve D2 diyodları üzerinden i L (wt ) I L sabit
yük akımı akmaktadır. wt>π anında, VAK 0 olduğu için, D3 ve D4 diyotları da devreye girecektir.
Kaynak selfinden akan akım wt=π anında ani olarak yön değiştiremeyeceği için (lenz yasası), D1 ve D2
diyodlarının anot-katot gerilim değerleri VAK 0 olsa bile, π≤wt≤π+ϒ aralığında akım akıtmaya devam
edeceğinden, C-D zaman aralığında (komutasyon aralığı), devredeki tüm diyodlar iletimde kalmaya
devam edecektir. Bu zaman diliminde, 4 adet diyod iletimde olduğundan, yük uçlarındaki gerilim değeri
sıfır değerini alacaktır ( Vyük(wt) 0 ). π≤wt≤π+ϒ aralığında, kaynak,kaynak selfi ve yükü içeren çevre
boyunca kirchhoff gerilim yasası uygulanır ise, Şekil 2'de, ikinci satırda yer alan kaynak selfinin gerilim
değişimi elde edilir.
π≤wt≤π+ϒ aralığında, devredeki tüm diyot akımlarının ve kaynak akımının değişimini bulmak için, Şekil
4'deki devreden yararlanılacaktır. Bu devrede, üç adet çevre yardımı ile arzu edilen akım değişimleri
elde edilebilir. Şekil 4'de D2 ve D4 diyotların içeren birinci çevre akım yönü (i k (t )) saat dönüş yönünde
alınmıştır. D1 ve D3 diyodlarını içeren ikinci çevre akım yönü (i k (t )) ise saat dönüş yönünün tersi
alınmıştır. Üçüncü çevre ise D1, kaynak selfi, kaynak ve yükü içeren çevre olup, çevre akımı saat dönüş
yönünde ve değeri i L (wt ) I L sabit olacaktır. Bu üç adet çevreden (4 adet diyodunda iletimde olduğu
hatırlanarak ve (diyotlara ilişkin dal akımları, çevre akımları cinsinden yazılarak);
i D1(wt ) i D2 (wt ) I L i k (wt )
i D3 (wt ) i D4 (wt ) i k (wt )
elde edilir. C-D aralığında, kaynak akımı (dal akımı) ise her üç çevre akımı kullanılarak;
i s (wt ) 2i k (wt ) I L
yazılabilir.
Her 4 diyodunda iletimde olduğu ilk wt=π anında, i k (wt )) 0 olacağından;
i D1(wt ) i D2 (wt ) I L i k (wt ) I L
i D3 (wt ) i D4 (wt ) i k (wt ) 0
0
i s ( wt ) 2i k ( wt ) I L I L i s ( wt ) I L olacaktır.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Her 4 diyodunda iletimde olduğu son an olan wt=π+ϒ anında, ( i D3 i D4 I L i k olduğu için)
i k (wt )) I L olacağından;
i D1(wt ) i D2 (wt ) I L i k (wt ) 0
i D3 (wt ) i D4 (wt ) i k (wt ) I L
I
L
i s ( wt ) 2i k ( wt ) I L I L
i s ( wt ) I L
yazılabilir.
i s ( wt ) kaynak akımının, komutasyon başlangıç ve bitimindeki değerleri belli olduğuna göre, birinci
çevreye kirchhoff gerilim yasası uygulanırsa;
wL s
d(i s ( wt ))
Vs ( wt ) 2Vsm sin wt
dwt
i s ( wt )
2Vsm cos wt
C
wL s
wt=π için is (wt ) I L olduğu bilindiğine göre, kaynak akım değeri ise;
i s (wt )
2Vsm cos
2Vsm
C IL C IL
wL s
wL s
i s ( wt )
2Vsm cos wt
2Vsm
IL
wL s
wL s
i s ( wt )
2Vsm
(1 cos wt ) I L
wL s
değeri kullanılarak;
olarak elde edilir. Kaynak akım değişimi belli olduğuna göre, i k (wt ) çevre akımı;
i s (wt ) 2i k (wt ) I L
i k ( wt ) 0.5i s ( wt ) 0.5I L
2Vsm
(1 cos wt )
2wL s
olacaktır. Buna göre diyod akım değişimleri ise;
i D1 ( wt ) i D2 ( wt ) I L
i D3 ( wt ) i D4 ( wt )
2Vsm
(1 cos wt )
2wL s
2Vsm
(1 cos wt )
2wL s
olacaktır.
Şekil 2'den yüke ilişkin ortalama gerilim değeri ise aşağıdaki gibi hesaplanabilir:
Vyük _ ort
2Vsm
1
(cos 1)
2 sin(wt )d(wt )
BİR FAZLI TAM KONTROLLÜ KÖPRÜ DOĞRULTUCUDA KAYNAK SELF ETKİSİ (KOMUTASYON OLAYI)
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
a)
Şekil 5
b)
Şekil 6
İnceleme sürekli hal koşulları altında ve yalnızca A-B zaman aralığında yapılacaktır. Şekil 5(a)'da, bir fazlı
(kaynak selfli) tam kontrollü köprü doğrultucu devresi, Şekil 5(b)'de ise bu devrenin, bir başka biçimde
gösterimi verilmiştir. wt=α anından az önce, T3 ve T4 tristörleri üzerinden i L (wt ) I L sabit yük akımı
akmaktadır. wt>α anında, tetikleme verildiği için, T1 ve T2 tristörleri de devreye girecektir. Kaynak
selfinden akan akım wt=α anında ani olarak yön değiştiremeyeceği için (lenz yasası), T3 ve T4
tristörlerinin anot-katot gerilim değerleri VAK 0 olsa bile, α≤wt≤α+ϒ aralığında akım akıtmaya devam
edeceğinden, A-B zaman aralığında (komutasyon aralığı), devredeki tüm tristörler iletimde kalmaya
devam edecektir. Bu zaman diliminde, 4 adet tristör iletimde olduğundan, yük uçlarındaki gerilim
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
değeri sıfır değerini alacaktır ( Vyük(wt) 0 ). Şekil 6'da, [0 ; 2π] aralığında, alt alta ve sırası ile; yük
gerilimi ve kaynak akımının değişimi verilmiştir.
Daha önce, bir fazlı tam dalga kontrolsüz köprü doğrultucuda anlatıldığı biçimde, Şekil 3'de görülen 3
adet çevre akımı yardımı ile, Şekil 6'da görülen değişimleri kullanarak, tristör akımları;
i T1(wt ) i T2 (wt ) i k (wt )
i T3 ( wt ) i T4 ( wt ) I L i k ( wt )
olarak elde edilir. A-B aralığında, kaynak akımı (dal akımı) ise her üç çevre akımı kullanılarak;
i s (wt ) 2i k (wt ) I L
yazılabilir.
Her 4 tristöründe iletimde olduğu ilk wt=α anında, i k (wt )) 0 olacağından;
i T1(wt ) i T2 (wt ) i k (wt ) 0
i T3 (wt ) i T4 (wt ) I L i k (wt ) I L
0
i s ( wt ) 2i k ( wt ) I L I L
olacaktır.
Her 4 tristöründe iletimde olduğu son an olan wt=α+ϒ anında, ( i T1 i T2 I L i k olduğu için)
i k (wt )) I L olacağından;
i T1(wt ) i T2 (wt ) i k (wt ) I L
i T3 (wt ) i T4 (wt ) I L i k (wt ) 0
I
L
i s ( wt ) 2i k ( wt ) I L I L
yazılabilir.
i s ( wt ) kaynak akımının, komutasyon başlangıç ve bitimindeki değerleri belli olduğuna göre, birinci
çevreye kirchhoff gerilim yasası uygulanırsa;
wL s
d(i s ( wt ))
Vs ( wt ) 2Vsm sin wt
dwt
i s ( wt )
2Vsm cos wt
C
wL s
wt=α için i s (wt ) I L olduğu bilindiğine göre, kaynak akım değeri ise;
i s ( wt )
2Vsm cos
C I L C I L
wL s
i s ( wt )
2Vsm cos wt
IL
wL s
2Vsm cos
wL s
2Vsm cos
wL s
değeri kullanılarak;
U.Arifoğlu
i s ( wt )
Güç Elektroniği Devreleri Ders Notu
2Vsm
(cos cos wt ) I L
wL s
wt=α+ϒ için, is (wt ) I L
değerini alacağından, i s () 2Vsm (cos cos( )) I L I L ,
wL s
komutasyon açısı;
cos( ) cos
2wL s
2 Vsm
IL
olarak elde edilir. Kaynak akım değişimi belli olduğuna göre, i k (wt ) çevre akımı;
i s (wt ) 2i k (wt ) I L
eşitliği yardımı ile;
i k ( wt ) 0.5i s ( wt ) 0.5I L
2Vsm
(cos cos wt )
2wL s
olacaktır. Buna göre tristör akım değişimleri ise;
i T1( wt ) i T2 ( wt )
2Vsm
(cos cos wt )
2wL s
i T3 ( wt ) i T4 ( wt ) I L
2Vsm
(cos cos wt )
2wL s
olacaktır.
Şekil 6'dan yüke ilişkin ortalama gerilim değeri ise aşağıdaki gibi hesaplanabilir:
Vyük _ ort
2Vsm
1
(cos cos( ))
2 sin(wt )d(wt )
ÜÇ FAZLI YARIM DALGA KONTROLSÜZ DOĞRULTUCUDA KAYNAK SELF ETKİSİ (KOMUTASYON
OLAYI)
Şekil 7
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 8
Şekil 7'de üç fazlı kontrolsüz yarım dalga doğrultucu devresi verilmiştir. Yük akımının düzgün ve
kesintisiz olduğu kabul edilmektedir ( i L (wt ) I L ). Şekil 7 devresine ilişkin yük gerilim değişimi, faz
akımları ve yük akım değişimi Şekil 8'de verilmiştir. Devrede A ile gösterilen anda (wt=π/6), yalnızca D3
diyodu iletimdedir. wt=π/6 anı, aynı zamanda komutasyon başlangıç anıdır. wt≥π/6 anından itibaren
D1 diyoduna ilişkin VAK 0 olduğundan, D1 diyodu iletime geçecektir. wt≥π/6 anında, v c ( wt ) fazına
ilişkin kaynak selfi ( L s ) üzerindeki enerji tümüyle boşalamadığından, D3 diyoduna ilişkin VAK 0
olmasına rağmen, D3 diyodun akımı, holding akımının altına düşmediği için, D3 diyodu iletimde
kalmaya devam edecektir. Bu nedenle [π/6; π/6+ϒ] zaman diliminde D1 ve D3 diyodları iletimdedir.
Şekil 9
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 9'da verilen devrede, komutasyon boyunca, D1 ve D3 diyodlarının akımlarının bulunabilmesi için,
iki adet çevre oluşturulmuştur. Birinci çevre; a ve c fazlarına ilişkin kaynakları ve hem D1 hem de D3
diyodlarını içermekte ve çevre akım yönü ise saat ibresinin dönüş yönü alınmıştır. İkinci çevre ise; c
fazına ilişkin kaynağı, D3 diyodunu ve yükü içerip, nötr hattını kullanmaktadır. İkinci çevreye ilişkin akım
yönü, saat ibresi dönüş yönü alınmıştır. Şekil 9'da, diyod akımları her iki çevre akımı cinsinden yazılırsa;
i a (wt ) i D1(wt ) i k (wt )
i c (wt ) i D3 (wt ) i L (wt ) i k (wt )
elde edilir.
Birinci çevrede, i k (t ) komutasyon akımı, wt=π/6 anında (Şekil 8'de A anı);
0
i a ( wt / 6) i D1 ( wt / 6) i k ( wt / 6) 0
değerini almaktadır. c fazına ilişkin ise;
0
i c ( wt / 6) i D3 ( wt / 6) I L i k ( wt / 6) I L
yazılabilir. Komutasyonun bitiş anı olan wt=π/6+ϒ anında (Şekil 8'de B anı);
i a (wt / 6 ) i D1(wt / 6 ) i k (wt / 6 ) I L
I
L
i c ( wt / 6 ) i D3 ( wt / 6 ) I L i k ( wt / 6 ) 0
olacaktır.
Eğer, A-B aralığında, birinci çevreye kirchoff gerilim yasası uygulanır ve Şekil 8'de verilen eğriler
ifadeleri basitleştirmek için π/6 değeri kadar sola ötelenir ise (eksen kaydırma);
V3 (wt ) V1 (wt ) 3Vm sin(wt ) 2wL s
di k (wt )
d(wt )
elde edilir. Yukarıdaki diferansiyel denklem çözülürse;
i k ( wt )
3Vm
cos(wt ) C
2wL s
elde edilir. Eğrilerde π/6 kadar öteleme yapıldığı için i k (wt 0) 0 olacağından;
i k ( wt 0)
i k ( wt )
3Vm
3Vm
cos(wt 0) C 0 C
2wL s
2wL s
3Vm
(1 cos(wt ))
2wL s
elde edilir. A-B aralığındaki komutasyon boyunca;
i c ( wt ) i D3 ( wt ) I L i k ( wt ) I L
3Vm
(1 cos(wt ))
2wL s
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
i a ( wt ) i D1 ( wt ) i k ( wt )
3Vm
(1 cos(wt ))
2wL s
yazılabilir. Ötelemenin geçerli olduğu eksen takımında;
i c (wt ) i D3 (wt ) I L i k (wt ) 0 I L
cos( ) 1 I L
2 wL s
3Vm
3Vm
(1 cos( ))
2wL s
(komutasyon açısı)
elde edilir.
Şekil 9'da, yük gerilim değişiminin iki farklı parçadan meydana geldiği görülmektedir. A-B ya da C-D
(komutasyon) aralığındaki yük gerilim değişimi şöyle hesaplanabilir:
Şekil 7'de, A-B aralığı boyunca, devrede yalnız iki kaynak akımı mevcut olduğundan;
i a (wt ) i b (wt ) I L
yazılabilir. Şekil 7'de, Va ( t ) , L s ,D1, yük ve nötr hattının oluşturduğu kapalı çevreye kirchoff gerilim
yasası uygulanırsa;
Vyük ( wt ) Va ( wt ) Ls
dia ( wt )
dt
elde edilir. Aynı şekilde Şekil 7'de, Vc ( t ) , L s ,D3, yük ve nötr hattının oluşturduğu kapalı çevreye
kirchoff gerilim yasası uygulanırsa;
Vyük ( wt ) Vc ( wt ) Ls
dic ( wt )
dt
elde edilir. Son iki eşitlik taraf tarafa toplanır ve elde edilen eşitlikte i a (wt ) i b (wt ) I L eşitliği türev
ifadelerinde kullanılırsa;
Vyük(wt) 0.5(Va (wt) Vc (wt))
elde edilir. Benzer çalışma C-D zaman aralığı için yapılırsa;
Vyük (wt) 0.5(Va (wt) Vb (wt))
elde edilir. Buna göre komutasyon boyunca, yük uçları arasındaki gerilim değişimi, iletimde olan
diyodların gerisindeki faz gerilimlerinin toplamlarının yarısına eşit değer almaktadır.
Yüke ilişkin ortalama gerilim değeri iki farklı yöntem ile hesaplanabilir:
5 / 6
1) Vyük _ ort 1 Vm sin()d 0.5Vm cos d 3 3Vm (1 cos( ))
2 / 3 / 6
0
4
( Vm : Yükün uçları arasına uygulanan gerilimin max. değeri)
2)
Vyük _ ort Vkaynak _ ort Vself _ ort
U.Arifoğlu
Vyük _ ort
Güç Elektroniği Devreleri Ders Notu
3 3Vm 3wL s
1 5 / 6w
IL
Vm sin(wt )dwt I L Ls
2 / 3w t / 6w
2
2
Not: "p" darbeli kontrolsüz doğrultucularda (p=3 veya p=6 olmak koşulu altında);
i a ( wt )
Vm
sin( )(1 cos(wt ))
wL s
p
i c ( wt ) I L
Vyük _ ort
Vm
sin( )(1 cos())
wL s
p
pVm
pwL s
sin( )
IL
p
2
ifadeleri geçerlidir.
ÜÇ FAZLI YARIM DALGA KONTROLLÜ DOĞRULTUCUDA KAYNAK SELF ETKİSİ (KOMUTASYON OLAYI)
Şekil 10
Şekil 11
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 10'da üç fazlı kontrollü yarım dalga doğrultucu devresi verilmiştir. Yük akımının düzgün ve
kesintisiz olduğu kabul edilmektedir ( i L (wt ) I L ). Şekil 10 devresine ilişkin yük gerilim değişimi, faz
akımları ve yük akım değişimi Şekil 11'de verilmiştir. Devrede A ile gösterilen anda (wt=π/6+α), yalnızca
T3 tristörü iletimdedir. wt=π/6+α anı, aynı zamanda komutasyon başlangıç anıdır. wt≥π/6+α anından
itibaren T1 tristörü iletime sokulmaktadır. wt≥π/6+α anında, v c ( wt ) fazına ilişkin kaynak selfi ( L s )
üzerindeki enerji tümüyle boşalamadığından, T3 tristörüne ilişkin VAK 0 olmasına rağmen, T3 tristör
akımı, holding akımının altına düşmediği için, T3 tristörü iletimde kalmaya devam edecektir. Bu nedenle
[π/6+α; π/6+α+ϒ] zaman diliminde T1 ve T3 tristörleri iletimdedir.
Şekil 9'da verilen çevreler, Şekil 10'da kullanılırsa;
i a (wt ) i T1(wt ) i k (wt )
i c (wt ) i T3 (wt ) i L (wt ) i k (wt )
elde edilir.
Birinci çevrede, i k (t ) komutasyon akımı, wt=π/6+α anında (Şekil 11'de A anı);
0
i a ( wt / 6 ) i T1 ( wt / 6 ) i k ( wt / 6 ) 0
değerini almaktadır. c fazına ilişkin ise;
0
i c ( wt / 6 ) i D3 ( wt / 6 ) I L i k ( wt / 6 ) I L
yazılabilir. Komutasyonun bitiş anı olan wt=π/6+α+ϒ anında (Şekil 11'de B anı);
i a (wt / 6 ) i D1(wt / 6 ) i k (wt / 6 ) I L
I
L
i c ( wt / 6 ) i D3 ( wt / 6 ) I L i k ( wt / 6 ) 0
olacaktır.
Eğer, A-B aralığında, birinci çevreye kirchoff gerilim yasası uygulanır ve Şekil 11'de verilen eğriler
ifadeleri basitleştirmek için π/6 değeri kadar sola ötelenir ise (eksen kaydırma);
V3 (wt ) V1 (wt ) 3Vm sin(wt ) 2wL s
di k (wt )
d(wt )
elde edilir. Yukarıdaki diferansiyel denklem çözülürse;
i k ( wt )
3Vm
cos(wt ) C
2wL s
elde edilir. Eğrilerde π/6 kadar öteleme yapıldığı için i k (wt ) 0 olacağından;
i k ( wt )
i k ( wt )
3Vm
3Vm
cos(wt ) C 0 C
cos
2wL s
2wL s
3Vm
(cos cos(wt ))
2wL s
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
elde edilir. A-B aralığındaki komutasyon boyunca;
i c ( wt ) i T3 ( wt ) I L i k ( wt ) I L
i a ( wt ) i T1 ( wt ) i k ( wt )
3Vm
(cos cos(wt ))
2wL s
3Vm
(cos cos(wt ))
2wL s
yazılabilir. Ötelemenin geçerli olduğu eksen takımında;
i c (wt ) i T3 (wt ) I L i k (wt ) 0 I L
cos( ) cos I L
2wL s
3Vm
3Vm
(cos cos( ))
2wL s
(komutasyon açısı)
elde edilir.
Şekil 11'de, yük gerilim değişiminin iki farklı parçadan meydana geldiği görülmektedir. A-B ya da C-D
(komutasyon) aralığındaki yük gerilim değişimi şöyle hesaplanabilir:
Şekil 10'da, A-B aralığı boyunca, devrede yalnız iki kaynak akımı mevcut olduğundan;
i a (wt ) i b (wt ) I L
yazılabilir. Şekil 10'da, Va ( t ) , L s ,T1, yük ve nötr hattının oluşturduğu kapalı çevreye kirchoff gerilim
yasası uygulanırsa;
Vyük ( wt ) Va ( wt ) Ls
dia ( wt )
dt
elde edilir. Aynı şekilde Şekil 10'da, Vc ( t ) , L s ,T3, yük ve nötr hattının oluşturduğu kapalı çevreye
kirchoff gerilim yasası uygulanırsa;
Vyük ( wt ) Vc ( wt ) Ls
dic ( wt )
dt
elde edilir. Son iki eşitlik taraf tarafa toplanır ve elde edilen eşitlikte i a (wt ) i b (wt ) I L eşitliği türev
ifadelerinde kullanılırsa;
Vyük(wt) 0.5(Va (wt) Vc (wt))
elde edilir. Benzer çalışma C-D zaman aralığı için yapılırsa;
Vyük (wt) 0.5(Va (wt) Vb (wt))
elde edilir. Buna göre komutasyon boyunca, yük uçları arasındaki gerilim değişimi, iletimde olan
diyodların gerisindeki faz gerilimlerinin toplamlarının yarısına eşit değer almaktadır.
Yüke ilişkin ortalama gerilim değeri iki farklı yöntem ile hesaplanabilir:
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
5 / 6
3 3V
m (cos cos( ))
1) Vyük _ ort 1
Vm sin()d 0.5Vm cos d
2 / 3 / 6
4
( Vm : Yükün uçları arasına uygulanan gerilimin max. değeri)
2)
Vyük _ ort Vkaynak _ ort Vself _ ort
Vyük _ ort
3 3V
5 / 6 w / w
1
m cos 3wL s I
Vm sin(wt )dwt I L Ls
L
2 / 3w t / 6w / w / w
2
2
Not: "p" darbeli kontrollü doğrultucularda (p=3 veya p=6 olmak koşulu altında);
i a ( wt )
Vm
sin( )(cos cos(wt ))
wL s
p
i c ( wt ) I L
Vyük _ ort
Vm
sin( )(cos cos(wt ))
wL s
p
pwLs
pVm
sin( ) cos
IL
p
2
ifadeleri geçerlidir.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
BİR FAZLI PWM DOĞRULTUCU ÇALIŞMASI
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
BİR FAZLI BRIDGELESS DOĞRULTUCU
Bridgeless doğrultucuların temel gayesi; hem DC barada (Şekil A(a)'da, P-N müşteri barası) arzu edilen
seviyede doğru gerilimi üretmek, hem de doğrultucunun şebekeden çektiği is(t) kaynak akımının
sinüzoidal formda olmasını sağlamaktır.
GÜÇ DEVRESİ ve ÇALIŞMA PRENSİBİ
Şekil A (a)'da görüldüğü gibi, 4 adet transistöre 4 adet ters yönde diyot bağlanmıştır. Amaç, doğru
gerilim olan Vyük gerilimini arzu edilen değere çekmektir. Bu devrenin amacına uygun çalışabilmesi için
Vyük >VSmax şartının sağlanmasıdır. Bu devre iki (bipolar PWM) veya üç seviyeli (unipolar PWM) olarak
da kullanılabilir.
Devrede mümkün olan anahtarlama seçenekleri şunlardır:
1) T1 ve T4 ON ve T2 ve T3 OFF. Bu durumda Vab = Vyük olacaktır. (Şekil b)
2) T1 ve T4 OFF ve T2 ve T3 ON. Bu durumda Vab = -Vyük olacaktır. (Şekil c)
3) T1 ve T3 ON ve T2 ve T4 OFF
veya T1 ve T3 OFF ve T2 ve T4 ON. Bu durumda Vab = 0 (Şekil d)
Kaynak self (Ls) geriliminin ani değeri;
di (t )
vL (t ) L L vS (t ) kVyük
dt
(1)
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
olacaktır. (1) eşitliğinde, k değeri 1,-1 veya 0 değerlerinden birini alacaktır.
Eğer k=1 ise, kaynak self gerilimi ani değeri negatif olacak ve dolayısı ile is kaynak akımı ani değeri
azalacaktır.
Eğer k=-1 ise, kaynak self gerilimi ani değeri pozitif olacak ve dolayısı ile is kaynak akımı ani değeri
artacaktır.
Eğer k=0 ise, vs (t) değerine bağlı olarak is kaynak akımı ani değeri azalacak ya da artacaktır.
BRIDGELESS DOĞRULTUCU KONTROL ŞEMASI
Devrenin kontrol şeması Şekil B'de gösterilmiştir. Devrenin gerilim kontrolörü PI tipidir. Kontrolör, DC
çıkış gerilimini sürdürebilecek gerekli gücü kontrol etmeye çalışacaktır. Gerilim kontrolörü, giriş akım
genliğini kontrol eder. Bunun sonucu olarak, gerilim kontrolör çıkışı, kaynak geriliminin (vs) ani değeri
ile çarpılır. Bu çarpımın sonunda ise giriş akımı referans değeri (isref) elde edilir. Akım kontrolörü ya da
histerisiz akım kontrol yöntemi ile mevcut akım (is) olması gereken akım değeri (isref)'e benzetilmeye
çalışılır.
is(t) şebeke akımının değişimi (THD değeri: % 0.96)
Yük gerilimi ( Vyük ) değişimi
Şekil A(a) devresinde aşağıda verilen bridgeless devre parametreleri için, şebeke akımı ve yük gerilimi
dalga şekilleri yukarıda verilmiştir.
Devre parametreleri: R yük 53.3 ohm, Arzu edilen DC bara gerilim değeri:
Vyük 500 V,C=4000
μF, L=
135 μH, PI kontrolörde; P=4e-5; I=9e-3, Şebeke gerilim etkin değeri: V=220 V, şebeke frekansı: f=50
Hz.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
ALTERNATİF AKIM KIYICILARI
1) Bir fazlı alternatif akım kıyıcıları
2) Üç fazlı alternatif akım kıyıcıları
Alternatif akım kıyıcılarında iki farklı yöntem kullanılır: 1) Faz Denetimi yöntemi, 2) Açık-Kapalı Denetim
BİR FAZLI ALTERNATİF AKIM KIYICILARI (Faz Denetimli)
A) Tam kontrollü AA kıyıcılar
Şekil 1. a) Omik yüklü AA kıyıcı devresi
Vyüketkin
b) Devre eğrileri
Vm
sin
(Vm sin wt ) * dwt
Şekil 2. R,L yüklü AA kıyıcı devresi ve bu devreye ilişkin eğriler
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 3. R,L yüklü AA kıyıcıda akım ve gerilim değişimleri
Tristör akımı i1 olmak üzere;
di ( t )
Vs
Vm sin wt L Ri( t ) i( t )
sin( wt ) Ae (R / L) t ; Z R ( wL )
dt
Z
tan ( wL / R ) ; i(wt ) ilk koşulu yukarıdaki akım denkleminde kullanılırsa;
A
i( t )
Vs
sin( )e(R / L)( / w ) elde edilir. Bu durumda tristör akımı;
Z
Vs
sin( wt ) sin( )e(R / L)( / w t ) olacaktır.
Z
T1 tristörünün sıfıra gittiği açı β ise, aşağıdaki denklem yardımı ile bulunabilir:
sin( ) sin( )e(R / L)() / w )
T1 tristörünün iletimde kaldığı açı değeri ise; olacaktır.
Vyüketkin
sin sin
(
)
( Vs sin wt ) * dwt Vs
Eğer, i1 (tristör) akımının etkin değeri IT ise, yük akımının etkin değeri;
I I
I yüketkin IT
T
T olacaktır.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Şekil 3. L yüklü AA kıyıcıda akım ve gerilim değişimleri
AA kıyıcıda, yük saf endüktif olduğu durumda, tetikleme açısı α=90 derece olduğunda, yük akımı
kesintisiz ve tam bir sinüzoidal akım formunda olacaktır. Tetikleme açısı α>90 olduğunda ise, yük
akımında kesinti başlayacaktır. Yük akımı kesintili olduğunda (α>90), kaynak akımı ile kaynak gerilimi
arasında 90 derece faz farkı olmayacaktır. 90 derece faz farkı, kaynak gerilimi ile kaynak akımının ana
harmoniği arasında olacaktır (yük akımı ile kaynak akımının aynı şey olduğu yukarıdaki devreden
anlaşılır).
Tristör akımının (i1) ani akım denklemi için i(wt ) ilk koşulu kullanılarak;
Vs
di ( t )
Vm sin wt L i ( t )
( cos wt cos )
dt
wL
elde edilir.
w .
IT =((0.16* Vm *(π*cos(2*α)-2.0*α+1.5*sin(2*α)-α*cos(2*α)+ 6.28))/( L
))
I I
I yüketkin IT
T
T olacaktır.
Vyüketkin
sin sin( )
(
)
( Vs sin wt ) * dwt Vs
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Saf endüktif yüklü AA kıyıcının bir uygulama alanı olarak STATİK VAr SİSTEMLERİ
α=90 derece için yük akımı saf sinüs formunda bulunmaktadır. α=90 derece için yük akımı etkin değeri;
I L I L
V
wL
;
( IL : iL (t ) akımının ana harmonik etkin akım değeri
(1)
Eğer tetikleme açısı 90 dereceden daha büyük yapılırsa, yük akımının etkin akım değeri de azalmaya
başlayacaktır. Bu durumda, L endüktans değerinin alfa açısı ile değiştiği kabulü de yapılabilir (alfa açısı
büyüdükçe akım küçüleceğinden, sanki alfadaki artışın sonucu olarak akım değerindeki bu azalmanın,
alfa artışı ile L değerinin artması sonunda gerçekleştiği gibi bir kabul yapılıyor). Gerçekte L değeri alfa
açısı ile değişmese de, bu kabul bize hesaplamalarda kolaylık sağlayacaktır. L() Le ifadesi bize,
alfanın değişimi ile ortaya çıkan self değerini (etkin) göstermektedir. Buna göre α=120 derece için elde
edilen L e değeri ile α=150 derece için elde L e değeri farklıdır.
α>90 derece için yük akımının Fourier analizinden elde edilen ana harmonik etkin değeri (ispatı
yapılmayacaktır);
I L
V
( sin ) ;
wL
(2) eşitliğinden;
o o
(2)
U.Arifoğlu
I L
Güç Elektroniği Devreleri Ders Notu
V
L L e f ( ) L
wL e
( sin )
(3)
yazılarak, L endüktans değerinin, alfa açısına bağlı olarak değiştiği düşünülebilir.
AA kıyıcısına yük olarak saf endüktif yük bağlandığında kaynaktan çekilen ana harmonik akımına ilişkin
reaktif güç değeri;
V
Q V * I L
wL e
(4)
( burada "1" indisi, reaktif gücün ana harmoniğe ait olduğunu göstermektedir)
ÖNEMLİ NOT: Burada yapılan hesaplamalarda, alfa açısı ile yüke ilişkin tüm reaktif güç değerinin
kontrol edildiği düşünülemez. Burada alfa ile reaktif gücün ana harmoniğinin değiştirildiği
unutulmamalıdır. Eğer reaktif güç sayacının yalnızca ana harmoniği ölçtüğü düşünülürse ancak o
zaman tam kompanzasyondan bahsedilebilir. Zira gerçekte, reaktif gücün içinde ana harmonik
dışında diğer harmoniklerin de reaktif güç değerleri bulunmaktadır.
UYARI: Yukarıdaki devrede, STATİK VAr SİSTEMİ içinde, neden AA kıyıcıya paralel olarak C kapasitesi
bağlandığını düşününüz.
Statik VAr sistemlerinin temel mantığı, fabrika içindeki ani ve rasgele ortaya çıkacak reaktif yük
değişimlerinde, şebekeden ihtiyaç duyulacak reaktif gücün tespit edilerek, mikroişlemciye gömülecek
yazılımı kullanarak, (2-4) eşitlikleri ile, alfa açısının hesaplanması ve bu açıya göre tristörlerin
tetiklenerek L ve C yardımı ile yükün ek reaktif güç talebinin şebeke yerine "statik VAr sisteminden"
karşılamasıdır. Böylece reaktif güç sayacı dönmeyecek ve cezaya girilmeyecektir.
(Not:Cari olan uygulamaya göre aktif güç bedelinin %20 sinden fazla değerde şebekeden reaktif güç
çekildiğinde tüketiciden reaktif güç ücreti tahsil edilmektedir. Bu oranın daha da aşağıya çekilmesi için
çalışmalar yapılmaktadır.)
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
B) Yarım kontrollü AA kıyıcılar
Vyüketkin
(Vm sin wt ) * dwt (Vm sin wt ) * dwt
(5)
* ((sin ) .) . * V
Vyüketkin (. * Vm
m
AÇIK_KAPALI DENETİM (ON-OFF CONTROL)
Yukarıda verilen yöntem kullanılarak, yük gerilimi etkin değeri değiştirilebilir. Bu durumda yük
geriliminin frekans değeri daima, şebeke gerilimi frekans değerinden küçük olacaktır.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Yukarıda verilen yük gerilim değişiminin etkin değeri;
Vyüketkin
V
n
* (Vm sin wt ) * dwt m
(n m)
V
n
m D
( n m)
(6) eşitliğinde;
n: Yük geriliminin bir periyodu içinde tekrar eden şebeke periyod sayısıdır.
m: Yük geriliminin bir periyodu içinde tekrar etmeyen şebeke periyod sayısıdır.
D=Doluluk oranı (duty cycle)
D=n/m
BİR FAZLI TRANSFORMATÖR UÇ DEĞİŞTİRİCİ
(6)
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Yukarıda verilen tristör tetiklemelerine göre yük uçları arasındaki gerilimin etkin değeri;
Vyüketkin
Vyüketkin
( V sin wt ) * dwt ( (V V ) sin wt ) * dwt
V
sin (V V )
sin
(
)
(
)
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
BİR FAZLI TAM KONTROLLÜ AA KIYICIDA YÜK OLARAK KAPASİTE OLMASI DURUMU
Pratikte, bir kapasiteyi AA kıyıcı çıkışına direkt olarak bağlamak mümkün değildir. Zira, anahtarlama
anında, kaynaktan yüksek değerde bir akım çekilir. Burada, öyle bir direnç değerinden bahsedeceğiz
ki, akımdaki bu sıçramayı engellemekle beraber, bu direnç değerinin devrenin zaman sabiti üzerinde
bir etkisi olmasın. Bu durumun bizim için anlamı, akım değişiminin sinüzoidal olmasıdır.
Kapasite akım ve gerilim değişimi (genel)
/
/
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
/
1) / tetikleme aralığı için yük geriliminin yarı periyoddaki ortalama değeri;
V /
Vyükort m sin wt * dwt sin wt * dwt sin wt * dwt
/
V
Vyükort m ( cos )
2) / tetikleme aralığı için yük geriliminin yarı periyoddaki ortalama değeri;
V
V /
Vyükort m sin wt * dwt sin wt * dwt m ( cos )
/
3) / tetikleme aralığı için yük geriliminin yarı periyoddaki ortalama değeri;
V
V
Vyükort m sin dwt m sin
STATİK REAKTİF GÜÇ KOMPANZASYONU
1. Alternatif akımlı enerji sistemlerinde reaktif güç kompanzasyonunun önemi bilinmektedir. Bu
yüzden güç faktörünü (cosϕ) düzeltmek için çeşitli yöntemler geliştirilmiştir. Kompanzasyon
sisteminde yükün özellikleri oldukça önemlidir. Güç ve güç katsayısı yaklaşık olarak sabit kalan bir
yükün varlığı halinde uygun olarak seçilmiş bir kondansatör grubu reaktif güç problemini çözer.
Fakat yük, zaman içinde farklı reaktif güç talebinde bulunuyor ise, yukarıda önerilen çözüm burada
yeterli olmaz. Bu durumda problem 4 farklı yaklaşım ile çözülür:
a) Besleme sisteminin kısa devre gücünü arttırıp sabit kondansatör bataryası kullanmak.
b) Mekanik olarak anahtarlanan şönt kondansatör grupları kullanmak
c) Senkron makinaları kapasitif bölgede çalıştırmak ya da ayrıca senkron kapasitör kullanmak.
d) Tristörlü reaktif güç sistemleri (statik VAr sistemleri) kullanmak.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
2. Gerek ark fırınlarında, gerek fazlarında farklı akfif ve reaktif güçler çeken dengesiz yüklerde,
gerekse güç faktörünün anlık olarak değişim gösterdiği tüketicilerin var olduğu yerlerde, ani reaktif
güç talebi sistemin gerilim değerinde ani gerilim dalgalanmalarına yol açarak enerji kalitesine ciddi
zarar verebilir. Arzu edilmeyen bu gerilim dalgalanmalarından kurtulmak için, ani raktif güç
talebinin ani olarak şebekeden değil, hızlı bir şekilde çalışan kompanzasyon sistemlerinden (statik
VAr sistemleri) temin edilmesi gerekir.
3. Değişken reaktif güç temininde senkron reaktör kullanımı bir çözüm yoludur. Enterkonnekte
sisteme bağlı olarak çalışan bir senkron makinanın uyarma akımı değiştirilerek reaktif güç denetimi
yapılabilir. Yükün aktif ve reaktif güç değerleri ani olarak ölçülüp senkron makinanın uyarma akımı
geri beslemeli olarak ayarlanırsa (kapalı çevrim), yükün bağlı olduğu barada güç katsayısı sabit
olarak ayarlanmış olur. DİNAMİK KOMPANZASYON olarak adlandırılan bu yöntemin aşağıda
belirtilen sakıncaları bulunmaktadır:
a) Döner makine kullanma zarureti ve makinanın eylemsizlik momenti nedeni ile ani olarak kontrol
etme imkanının olmayışı.
b) Tepkime hızının yeterince büyük olmaması
c) Üç fazın birbirinden bağımsız olarak kontrol edilme imkanının olmaması
Yukarıda belirtilen nedenlerden dolayı dinamik kompanzasyon yaygın olarak kullanılmamaktadır.
Yukarıda sayılan sakıncalar tristörlü devrelerle ortadan kaldırılmıştır. Tristörlü devreler, "statik VAr
kompanzasyonu" adı altında endüstride "dinamik kompanzasyona" tercih edilmektedirler. Çok değişik
türlerde statik VAr sistemleri tasarlanabilir. Aşağıda adı geçen 3 ayrı kompanzasyon türü diğerlerine
göre daha yaygın olarak kullanılmaktadır:
1) Tristör anahtarlamalı tristörler
2) Tristör anahtarlamalı endüktörler
3) Sabit kapasitör ve tristör denetimli endüktörler
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Yukarıda verilen şekilde tristörler "anahtarlama elemanı" olarak kullanılmakta ve kademeli denetim
yapılmaktadır. Bu tür kullanımda geçici olaylardan kaynaklanan problemler minimize edilmesi,
harmonik oluşmaması, kayıpların azaltılması, denetim esnekliğinin sağlanması, yedekleme olanağı
dolayısı ile sistem güvenirliğinin yüksek olmasıdır. Bu sistemin olumsuz yönleri ise reaktif güç
değişimlerine en erken çeyrek periyot içinde cevap verebilmeleri, daha duyarlı bir reaktif güç kontrolü
için daha çok kapasite ve/veya bobin kullanılmasının gerekmesi, dolayısı ile sistem maliyetinin
artmasıdır.
Yukarıda verilen sistemde ise sabit bir kapasitör grubu ve tristör denetimli bir bobin yardımı ile reaktif
güç kontrolü yapılmaktadır. Sistemin güç katsayısını iyileştirmeye dönük olarak tristörler tetiklenerek
reaktif güç kontrolü yapılmaktadır. Bu tür kontrolde, sinüzoidal gerilim AA kıyıcı tarafından bozulduğu
için, şebekeye doğru harmonik basılmaktadır. Bunu engellemek için ise harmonik filtrelerine ihtiyaç
duyulur. Bu sistem sürekli ve kesintisiz reaktif güç denetimi yapar. Bu yapı, sisteme hem endüktif hem
de kapasitif reaktif güç üretebildiği için geniş bir aralıkta reaktif güç kontrolü yapabilir. Eğer maliyetten
kaçınılmıyor ise bir önceki şekilde a ve b devreleri yukarıdaki devre ile birlikte kullanılarak harmonik
filtre ihtiyacı azaltılabilir.
TRİSTÖR ANAHTARLAMALI KONDANSATÖRLER (TSC)
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Yukarıda verilen şekilde görülen tristör anahtarlamalı kondansatör reaktif güç kontrol sistemi, N adet
paralel bağlı koldan oluşmaktadır. Bir kol üzerinde bir adet AA kıyıcı bir adet kondansatör ve bir adet
bobinden oluşan bir devre bulunmaktadır. Bu tür bir sistemde TCI'dan farklı olmak üzere, bobin
akımının etkin olarak sürekli ayarlanması söz konusu değildir. Bu yapıda, kondansatör ya devreye
alınmakta ya da devreden çıkartılarak bir anahtarlama yapılmaktadır.
Bu sistemde kondansatörü besleyen çift yönlü tristörlerin akımları doğal olarak sıfır noktasından
geçerken tristör kendiliğinden devre dışına çıkar. Kondansatör akımı ile kondansatör gerilimi arasında
90 derece faz farkı olduğundan, akım sıfır noktasından geçerken gerilim (pozitif ya da negatif) tepe
noktasında olacağından, şebeke ile bağlantısı kesilen bir kondansatörün uçları arasındaki gerilim
(pozitif ya da negatif) tepe noktasında kalacaktır. Tristörler tekrar tetiklendiklerinde eğer tetiklendikleri
an, "şebeke gerilimi" kondansatörün dolu olarak kaldığı (–Vmax ya da +Vmax) gerilim değerinden farklı
bir değerde ise, bu gerilim farkının büyüklüğüne bağlı olarak kondansatör üzerinden bir akım akacaktır.
Bu nedenle tristörlerin tetiklendiği an, şebekenin (kondansatörün dolu olduğu değere bağlı olarak)
(–Vmax ya da +Vmax olduğu anlardır. Yine de, olası bir olumsuz duruma karşı tristörlerin tetiklendiği
anda büyük değer alabilecek bu akımı engellemek için, kondansatöre seri olarak bir bobin bağlanarak
başlangıçta bu akımın büyük değer alması engellenir. Bu yöntemin hassas reaktif güç kontrolü
yapabilmesi, kondansatör sayısının çoğaltılmasına (bu da sistem maliyetine) bağlıdır.
ÜÇ FAZLI YILDIZ BAĞLI OMİK YÜKLÜ AA KIYICILAR [8]
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
a) Şebeke faz arası gerilimleri b) Şebeke faz-nötr gerilimleri c) Tristör kapı darbeleri
d) Yük faz-nötr gerilimleri
Not: Yukarıda verilen dalga şekilleri, α tetikleme açısı 60 derece ve 120 derece için ayrı ayrı çizilmiştir.
Üç fazlı yıldız yük durumunda, yükün her bir fazına faz-nötr gerilimi gelirken, yük üçgen bağlı olduğunda
ise, yükün her bir koluna faz arası gerilimler uygulanır. Pratik hayatta, ters bağlı iki tristör yerine bir
adet triyak tercih edilir. Hem şebekenin hem de yükün dengeli olduğu durumlarda, yıldız bağlı yük için
dikkat edilmesi gereken kurallar aşağıda maddeler halinde açıklanmıştır:
1) Herhangi bir fazdaki yükün üzerinden akım akabilmesi için iki farklı faza bağlı iki tristör kesinlikle
iletimde olmalıdır.
2) Aynı faza bağlı (ters yönde) olan iki tristör kesinlikle aynı anda tetiklenmemelidir.
3) Aynı anda (iki farklı faza bağlı) iki farklı tristör iletimde olduğunda, bu tristörlerden bir tanesi pozitif
alternansı iletiyor iken diğer tristör ise negatif alternansı iletmelidir.
4) Herhangi bir t anında üç adet tristör aynı anda iletimdeyse, yükün her bir kolundaki gerilim değeri,
o kolun bağlı olduğu şebekeye ilişkin faz-nötr gerilim değerine eşit olur ( Van VAN ; Vbn VBN ;
Vcn VCN ).
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
5) Eğer, herhangi bir t anında üç adet değil, 2 adet (her bir tristör farklı faza bağlı olan) tristör iletimde
ve diğer (üçüncü) faza ilişkin tristör açık devre ise, devrede olan iki tristöre bağlı yük dirençlerinin
gerilimleri, devrede olan fazlara ilişkin faz arası gerilim değerlerinin yarısına eşit olacaktır. Örneğin,
Van 0; Vbn 0 ve Vcn 0 ise, Van 0.5 * VAB ; Vbn 0.5 * VAB ; Vcn 0 olacaktır.
6) Herhangi iki tristör devredeyken, (uygun şartlar sağlandığında) iletim sırası gelen 3. tristör devreye
alındığında, 4. maddede anlatılan durum ortaya çıkar.
7) İçinden akım akan tristörlerin kesime gidebilmesi için her birinin içinden geçen akım değerinin,
holding akım değerinin altına düşmesi gerekir.
Not 1: 0 60 o için; T1 tristör tetiklenmeden önce iki adet tristör iletimdedir. T1 tristörü iletime
geçtiğinde üç tristör aynı anda iletimdedir. 2 ve 3 tristörün iletimde olduğu anlar birbirini takip ederler.
Bu tetikleme aralığında, yıldız bağlı yük için, çıkış geriliminin etkin değeri aşağıdaki gibi hesaplanabilir:
/
Van(etkin )
( v an ( wt )) d ( wt )
sin wt
/ sin wt
VAN
d( wt )
d ( wt )
/
/ sin wt
/
d( wt )
/ sin wt
sin wt
d
(
wt
)
/
Van(etkin )
/
.
sin
VAN (
)
d( wt )
.
Not 2: 60 o 90 o için; her an sadece 2 adet tristör iletimdedir. Bu tetikleme aralığında, yıldız bağlı
yük için, çıkış geriliminin etkin değeri aşağıdaki gibi hesaplanabilir:
/
Van(etkin )
( v an ( wt )) d( wt )
/ / sin wt
/ sin wt
VAN
d
(
wt
)
d
(
wt
)
/ /
/ /
sin
cos
Van(etkin )
VAN (
)
.
.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
Not 3: 90 o 150 o için; her hangi bir t anında 2 adet tristör iletimde olsa da, hiçbir tristörün
iletimde olmadığı süreler de mevcuttur. Bu tetikleme aralığında, yıldız bağlı yük için, çıkış geriliminin
etkin değeri aşağıdaki gibi hesaplanabilir:
/
Van(etkin )
( v an ( wt )) d( wt )
sin wt
sin wt
VAN
d( wt )
d( wt )
/ /
/ /
sin
cos
Van(etkin )
VAN (
)
.
.
o
o
Not 4: 150 için iki tristörün iletimde kaldığı bir zaman dilimi olmadığından dolayı, 150 için
çıkış gerilim etkin değeri sıfır olur ( 90 o 150 o ).
3 fazlı, üçgen bağlı omik yük için AA kıyıcı devre şeması
ÜÇ FAZLI ÜÇGEN BAĞLI OMİK YÜKLÜ AA KIYICILAR [8]
Yukarıda üç fazlı üçgen bağlı omik yüklü bir yükün şebekeye bağlandığı durum ve aşağıda ise üçgen
o
bağlı devreye ilişkin 120 için, akım ve gerilim dalga şekilleri verilmiştir.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
120 o için; a) Şebeke faz arası gerilimleri, b) Tristör tetikleme darbeleri, c) Şebeke faz
akımları, d) Yük akımları
Üçgen bağlı devredeki tristör akımları, yıldız bağlı devredeki tristör akımlarının göre 1/ 3 katıdır
(ekonomik). Omik yük durumu için tetikleme açı aralığı 0 o 180 o olacaktır. R yük uçları arasındaki
gerilimin etkin değeri;
1 2
2
VR (etkin )
( v ab ( wt )) d( wt )
2 0
sin 2
1
VAN (
)
2
olarak hesaplanır .
1/ 2
0.5
2
2
2 sin wt
2
V
d( wt )
AB
2
4
0.5
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu
BİR FAZLI PWM DENETİMLİ AA GERİLİM KIYICILARI [8]
Yukarıda verilen devrede, dört adet (IGBT veya MOSFET) kullanarak, işaretlerin uygulandığı zaman
aralığının değeri değiştirilmek sureti ile yüke ilişkin akım ve gerilimin etkin değeri kontrol edilebilir.
U.Arifoğlu
Güç Elektroniği Devreleri Ders Notu