Durum denklemlerini çözmede fazör kavramı
Diferansiyel Denklem
Fazör
Kavramı
x (t ) Ax(t ) Bu (t )
Cebrik Denklem
jX AX BU
Cebrik Denklem
çözümü
X [ j A]1 BU
Özel Çözümün
bulunması
Zaman Bölgesine
geçiş
Çözüme ilişkin
fazörlerin elde
edilmesi
Sürekli Sinüsoidal Hal’de devre denklemleri
Lineer zamanla değişmeyen elemanlardan oluşmuş hepsi w frekanslı
kaynaklarla sürülen devre
1. Düğüm i (t ) i (t ) i (t ) 0, t
2
3
için KAY 1
Ai(t ) 0, t
Re{I1e jt } Re{I 2e jt } Re{I 3e jt } 0, t
Teklik ve lineerlik özelliğinden
Tüm düğümler için genelleştirirsek
I1 I 2 I 3 0
AI 0
Reel katsayılı
matris
Kompleks elemanlı
sütun vektör
L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York
1-2-3-1 Kapalı düğüm dizisi için KGY:
v1 (t ) v2 (t ) v4 (t ) 0, t
AT vd (t ) v(t ), t
Re{V1e jt } Re{V2e jt } Re{V4e jt } 0, t
Teklik ve lineerlik özelliğinden
V1 V2 V4 0
Genelleştirirsek
ATVd V
L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York
Lineer zamanla değişmeyen devre elemanları
Direnç
Endüktans
Kapasite
Gerilim kontrollü gerilim kaynağı
Gerilim kontrollü akım kaynağı
Akım kontrollü gerilim kaynağı
Akım kontrollü akım kaynağı
Jiratör
İdeal Transformatör
L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York
Empedans-Admitans Kavramı
Amaç: Lineer zamanla değişmeyen elemanlardan oluşmuş N devresinin
iki uçlu olarak tanımlanması
is
+
v
_
N
1-kapılısı
Z ( w) R( w) jX ( w)
resistans reaktans
is (t ) Re[ I se jwt ] I s coswt s
v(t ) Re[Ve jwt ] V coswt v
N 1-kapılısına ilişkin giriş empedansı
V ( w)
Z ( w) ˆ
I s ( w)
V (w) Z (w) I s (w)
V ( w) V ( w) e jv
V (w) Z (w) I S
v Z S
v(t ) Z (w) I S coswt Z S
i
+
+
v
_
vS (t ) Re[VS e jwt ] VS coswt S
N
1-kapılısı
Y ( w) G ( w) jB( w)
kondüktans suseptans
i(t ) Re[ Ie jwt ] I coswt I
N 1-kapılısına ilişkin giriş admitansı
I ( w)
Y ( w) ˆ
Vs ( w)
I ( w) Y ( w)Vs ( w)
I ( w) I ( w) e j I
I (w) Y (w) VS
I Y S
i(t ) Y (w) VS coswt Y S
vC (t ) cos 2t ve devre SSH’de çalışmaktadır. a) Devrede gösterilen akım
ve gerilimlerin fazör diyagramını çiziniz. b) e1 (t )‘ ye ait fazörü ve e1 (t ) ‘yi
belirleyiniz.
Empedans-Admitans Kavramını kullanarak neler yapabiliriz?
V ( w)
Z ( w)
I ( w)
V1 ( w) V2 ( w)
I ( w)
Z1(w) Z2 (w)
I ( w)
Y ( w)
V ( w)
I1 ( w) I 2 ( w)
V ( w)
Y1(w) Y2 (w)
L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York
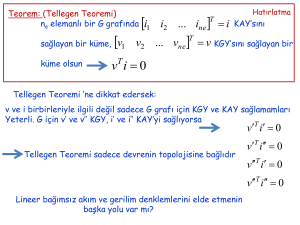
KAY: Ai (t ) 0
s- Tanım Bölgesinde Devre Denklemleri
Hatırlatma
AI 0
KGY: AT vd (t ) v(t ) 0
ATVd V 0
ETB: (M 0 D M1 )v(t ) ( N0 D N1 )i(t ) us (t )
d
D ̂
dt
(M 0 s M1 )V (s) ( N0 s N1 ) I (s) U s (s) U i
0
AT
0
0
I
M 0 D M1
vd (t ) 0
v(t ) 0
0
N 0 D N1 i(t ) us (t )
A
T (D)
w(t )
0
AT
0
0
0
Vd ( s)
V ( s)
0
0
i
N 0 s N1 I ( s) U s ( s) U
A
I
M 0 s M1
T (s)
W (s)
Devre Denklemleri
0
AT
0
KAY:
AI 0
KGY:
ATVd V
ETB:
M (w)V N ( w) I U s
A Vd 0
I
0 V 0
M ( w) N ( w) I U s
0
T (w)
T ( w) ˆ T 0 jwT1
Direnç Devreleri
0
AT
0
0
I
M
A vd (t ) 0
0 v(t ) 0
N i(t ) us (t )
T
vd (t ), v(t ), i (t )
Sürekli Sinüsoidal Hal
0
AT
0
A Vd 0
I
0 V 0
M ( w) N ( w) I U s
0
T (w)
Vd ,V , I
Zamanın fonksiyonu olan vektörler Elemanları fazör olan vektörler
T’nin elemanları reel sayılar
T(w)’nın son ne satırı kompleks sayılar
Devre reel katsayılı, lineer,
cebrik denklem takımı ile
tanımlanmıştır.
Devre kampleks katsayılı, lineer,
cebrik denklem takımı ile
tanımlanmıştır.
v
0
0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1 0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1 0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
G1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
G2
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
jC1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
jC 2
0
0
0
0
0
0
0
1 0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
1 0
0
0
0
0
0
0
0 Vd 1 0
0 Vd 2 0
0 Vd 3 0
1 Vd 4 0
0 V1 0
0 VR1 0
0 VR 2 0
0 VC1 0
0 VC 2 0
0 V p 0
0 Vn 0
0 Vo 0
0 I1 1
0 I R1 0
0 I R 2 0
0 I C 1 0
0 I C 2 0
0 I p 0
0 I n 0
0 I o 0
Devre Denklemleri: Genelleştirilmiş Düğüm Gerilimleri Yöntemi
KAY:
AI 0
KAY:
AI 0
KGY:
ATVd V
KGY:
ATVd V
ETB:
M (w)V N ( w) I U s
ETB:
M (w)V N ( w) I U s
Yöntem:
I Y (w)V I s
1. Adım: nd 1 düğüm için KAY’nı yaz
AI 0
I1
[ A1 A2 ] 0
I2
2. Adım: 1. grup elemanların eleman tanım bağıntılarını yerleştir,
2. grup elemanların eleman tanım bağıntılarını yaz.
V1
[ A1Y1 (w) A2 ] A1I S
I2
V2
[ M (w) N ( w)] U S
I2
3. Adım: eleman gerilimlerini düğüm gerilimleri cinsinden yaz
V1 A1TVd
V2 A2TVd
A1Y1 ( w) A1T
T
M
(
w
)
A
2
A2 Vd A1I S
U
I
N ( w) 2 s
4. Adım: düğüm gerilimlerini ve ikinci grup elemanların akımlarını bul
Örnek: Genelleştirilmiş düğüm gerilim yöntemine ilişkin denklemleri
yazınız.
v
Devre Denklemleri: Genelleştirilmiş Çevre Akımları Yöntemi
KAY:
KGY:
ETB:
Yöntem:
I BT IÇ
BV 0
M (w)V N ( w) I U s
KAY:
KGY:
ETB:
I BT IÇ
BV 0
M (w)V N ( w) I U s
V Z ( w) I Vs
1. Adım: ne nd 1 göz için KGYı’nı yaz Bv 0
V1
[ B1 B2 ] 0
V2
2. Adım: 1. grup elemanların eleman tanım bağıntılarını yerleştir,
2. grup elemanların eleman tanım bağıntılarını yaz.
I1
[ B1Z1 (w) B2 ] B1Vk
V2
V2
[ M (w) N ( w)] U S
I2
4. Adım: çevre akımlarını ve ikinci grup elemanların gerilimlerini bul
3. Adım: eleman akımlarını çevre akımları cinsinden yaz
I1 B1T I ç
I 2 B2T I ç
B1Z1 ( w) B1T
T
N
(
w
)
B
2
B2 I ç B1Vs
U
V
M ( w) 2 S
4. Adım: çevre akımlarını ve ikinci grup elemanların gerilimlerini bul
Hatırlatma
Toplamsallık ve Çarpımsallık Özelliği
Teorem: (Toplamsallık)
Lineer direnç, kapasite, endüktans elemanları
1. Grup bağımsız kaynaklar
+Bağımsız kaynaklar
2. Grup bağımsız kaynaklar
1. Grup bağımsız kaynaklar devrede, 2. grup bağımsız kaynaklar
devre dışı iken devre çözülsün
i1 (t ), v1 (t )
I1,V1
2. Grup bağımsız kaynaklar devrede, 1. grup bağımsız kaynaklar
devre dışı iken devre çözülsün
i2 (t ), v2 (t )
I 2 ,V2
Devrede tüm bağımsız kaynaklar varken ki çözüm
iT (t ) i1 (t ) i2 (t ),
vT (t ) v1 (t ) v2 (t )