MĐNKOWSKĐ 4-UZAYINDA
EĞRĐLER
ve
HAREKETLERĐN GEOMETRĐSĐ
Pamukkale Üniversitesi
Fen Bilimleri Enstitüsü
Yüksek Lisans Tezi
Matematik Anabilim Dalı
Hatice TOZAK
081441006
Yrd. Doç. Dr. CANSEL AYCAN
Temmuz 2010
DENĐZLĐ
i
ii
iii
TEŞEKKÜR
Yükseklisans danışmanlığımı üstlenip, bilgi ve tecrübesiyle destek veren,
çalışmamın her safhasında yardımını esirgemeyen sayın hocam Yrd. Doç. Dr. Cansel
AYCAN’a şükran ve saygılarımı sunarım.
Tez çalışmam sırasında bana yardımcı olan sayın hocam Yrd. Doç. Dr. Şevket
CĐVELEK’e de teşekkürü borç bilirim.
Desteğini her zaman yanımda hissettiğim sevgili ailem Ayşe TOZAK ve Süleyman
TOZAK’a çok teşekkür ederim.
Hatice TOZAK
iv
ÖZET
MĐNKOWSKĐ 4-UZAYINDA EĞRĐLER
ve
HAREKETLERĐN GEOMETRĐSĐ
TOZAK Hatice
Yüksek Lisans Tezi, Matematik Anabilim Dalı
Tez yöneticisi:Yrd. Doç. Dr. CANSEL AYCAN
Bu çalışma beş bölümden oluşmaktadır.
1.Bölümde Yarı Riemann uzayı, Lorentz Uzayı , E14 Minkowki uzayında iç
çarpım ve özellikleri, vektörel çarpım, vektör yapıları, vektörler arasındaki açı kavramı
ve hiperdüzlemler gibi Minkowski uzay zaman eğrileri ve hareketlerin geometrisi için
temel tanım ve teoremlere yer verilmiştir.
2 . Bölümde ise eğrisel yapılardaki Riemann manifoldları üzerindeki uzunluk ve
uzaklık, jeodezikler ve bunları da admissible aileler, minimalize eğrilerin durumu ve
lokal minimalize durumları incelendi.
3. Bölümde konneksiyonlar, Üstel dönüşümler ve Normal komşuluklar ve
normal koordinatlardan bahsedildi.
4. Bölümde E14 Minkowski uzayında eğriler için Serret-Frenet formüllerinden
yararlanarak yapı denklemleri oluşturuldu. Đnvolüt ve Bertrand eğrileri incelendi.
En son bölümde ise; yaptığımız çalışmalar için uygulamalara yer verildi.
Çalışmalarımızın bazı geometrik uygulamalarına da değinildi.
Anahtar Kelimeler: metrik fonksiyonu, Lorentz-Minkowski uzayı, Hiperbolik uzay,
koordinat ve konneksiyonlar, jeodezik, üstel dönüşüm, Frenet çatısı
v
ABSTRACT
CURVES ON THE MĐNKOWSKĐ 4-SPACE
and
GEOMETRY OF MOTIONS
TOZAK Hatice
M. Sc. Thesis in Mathematic
Supervisor: Yrd. Doç. Dr. CANSEL AYCAN
This work consist of five chapters.
The first chapter is about the basic definitions and theorems related to Semi-Riemann
space, inner product and properties, metric function, angle between two given vectors,
vector product, hyperplanes curves on the 4-dimensional Minkowski space and
geometry of motion.
The
second chapter includes length and distance on the Riemann manifolds,
Riemann geodesics, admissible families, case of minimizing curves and
locally
minimizing.
In the third chapter, exponential map definition and basic properties,Normal
Neighbourhoods and Normal Coordinates are introduced.
The fourth chapter is composed of the involute curves in the E14 Minkowski space,
the geodesics of the Model space, the formulas of Serret-Frenet, Bertrand curve couple
in the E14 Minkowski space.
In the final chapter, the applications for the study we have done were given, besides,
some geometric applications of the study are mentioned.
Key words: metric function, Lorentz-Minkowski space, Hyperbolic space,
neighbourhoods and connections ,geodesics , exponential map, Frenet frame
vi
ĐÇĐNDEKĐLER
Sayfa
ONAY SAYFASI .............................................................................................................i
TEŞEKKÜR.....................................................................................................................ii
BĐLĐMSEL ETĐK SAYFASI ........................................................................................ iii
ÖZET ...............................................................................................................................iv
ABSTRACT .....................................................................................................................v
ĐÇĐNDEKĐLER...............................................................................................................vi
SĐMGELER VE KISALTMALAR DĐZĐNĐ.............................................................. viii
ŞEKĐLLER DĐZĐNĐ .......................................................................................................ix
GĐRĐŞ................................................................................................................................x
-BÖLÜM 1 LORENTZ-MĐNKOWSKĐ UZAYI
1.1 Temel Yapılar.............................................................................................................1
1.2 E14 Minkowski Uzayında Açı ve Hareket Kavramı ..................................................7
1.3 E14 Minkowski Uzayında Yay Uzunluğu ................................................................29
-BÖLÜM 2 EĞRĐSEL YAPILAR
2.1 Riemann Manifoldları Üzerinde Uzunluklar ve Uzaklıklar......................................34
2.2 Jeodezik .....................................................................................................................39
2.2.1 Admissible Aileler....................................................................................39
2.2.2 Minimalize Eğriler ...................................................................................41
2.2.3 Lokal Minimalize Eğriler .........................................................................46
-BÖLÜM 3KONNEKSĐYON ve KOORDĐNATLAR
3.1 Riemann Konneksiyonu ...........................................................................................52
3.2 Üstel Dönüşüm ..........................................................................................................58
3.3 Normal Komşuluklar ve Normal Koordinatlar .........................................................62
vii
-BÖLÜM 4EĞRĐSEL YAPI FORMÜLLERĐ
4.1 Model Uzayların Jeodeziği .......................................................................................67
4.2 Serret-Frenet Formüller .............................................................................................70
4.3 E14 Minkowski Uzayındaki Eğrinin Đnvolüt .............................................................72
4.4 E14 Minkowski Uzayında Bertrand Eğri Çifti...........................................................78
-BÖLÜM 5BAZI EĞRĐSEL UYGULAMALAR
5.1 Problem 1 ..................................................................................................................82
5.1 Problem 2 ..................................................................................................................86
KAYNAKLAR ..........................................................................................................88
ÖZGEÇMĐŞ ...............................................................................................................89
viii
SĐMGELER ve KISALTMALAR DĐZĐNĐ
E1n
:
n-boyutlu Minkowski uzayı
E14
:
4-boyutlu Minkowski uzayı
IR n
:
n-boyutlu Öklid uzayı
Hn
:
Hiperbolik uzay
S12 (m, r ) :
Yarı-Riemann küresi
H 02 (m, r ) :
Yarı-Riemann hiperbolik uzayı
C (u )
:
Yarı-Riemann timelike konisi
α
:
Diferansiyellenebilir eğri
λ
:
Diferansiyellenebilir fonksiyon
µ
:
Diferansiyellenebilir fonksiyon
T
:
Eğrinin teğet vektör alanı
N
:
Eğrinin normal vektör alanı
B
:
Eğrinin binormal vektör alanı
E
:
Eğrinin trinormal vektör alanı
g
:
Lorentz metriği
dH
:
Hiperbolik metrik
u
:
u nun normu
k1
:
Eğrinin birinci eğriliği
k2
:
Eğrinin ikinci eğriliği
k3
:
Eğrinin üçüncü eğriliği
ix
ŞEKĐLLER DĐZĐNĐ
Şekil 2.1 Admissible aileler
Şekil 2.2 Ivme vektörünün γ deforme edilmesi
Şekil 2.3. Köşenin yuvarlanması
Şekil 2.4. Gauss Lemmanın ispatı
Şekil 3.1. Riemann normal koordinatları
Şekil 3.2. Düzgün normal komşuluğu
Şekil 4.1. Simetrik S 2 üzerinde jeodeziklerin özdeşlemesi
Sekil 4.2 Yuvarın jeodeziği
Şekil 4.3 Yarı uzayın jeodeziği
Şekil 5.1.a Yarım küre
Şekil 5.1.b Đki meridyenin şekli
x
GĐRĐŞ
Çalıştığım konu olan Lorentz uzayını inceleyerek, Minkowski 4-uzayındaki temel
yapılar kuruldu. Öklid uzayı ve hiperbolik uzayla karşılaştırmalarda bulunuldu.
Öncelikle, kurulmasında önemli olan metrik yapıları irdelendi. Daha sonra vektör
yapılarını kurarak açı kavramı belirtildi. Yay uzunluklarının hiperbolik uzayı ile Lorentz
arasındaki yay uzunluklarını ele aldım. Uzunluk ve uzaklık kavramlarını belirleyerek
jeodeziklerimi kurmuş oldum. Dönüşümlerle minimalize ve lokalliğini gördüm.
Koordinat yapılarını hem cebirsel ifade olarak hem de topolojik boyutunu inceledim.
Kaynak taraması
Lorentz geometrisi, 1873 ‘Uber die soganannte Nicht-Euklidische Geometrie’
makalesinde ortaya çıkmıştır. 1885 ‘Nicht-Euklidischen Rumformen’ teziyle Killing
tarafından geliştirildi. Lorentz 4-boyutlu uzayını Poincaré 1906 da ‘Sur la Dynamique
de l’electron’ makalesinde spacetime için bir model olarak tanıtıldı. Lorentz 4- uzayına
Minkowski’ nin 1907 deki ‘Das Relativitätsprinzip’ konusunda Özel Rölativite
teorisindeki space time için model olarak alındı. Yorumunu 1977 de yayınlanan
Hermann Minkowski ve Einstein’ ın Özel Rölativite teorisinde görülür. 1908 yılında
Minkowski tarafından çıkarılan makalelerle geliştirildi. Lorentz 4-uzayına, Minkowski
uzay-zaman
da denir. Lorentz dönüşümlerini ilk olarak Killing tarafından
değerlendirilip ortaya kondu. Fakat dönüşümler, Lorentz
tarafından 1904 yılında
‘Electromagnetic phenomena in a system moving with any velocity lrss than that of
light’ makalesinde tanımlandı. Rölativite teorisinde Lorentz geometrisinin yer almasıyla
ilgili tartışmalar sonucunda 1978 yılında Penrose’ nin ‘The geometry of universe’
konusunda ve G. Naber’ in ‘The geometry of Minkowski spacetime’ tek konulu
çalışmasında ele alındı.
Hiperbolik uzayda hiperboloid model 1878 de Killing’ in ‘Ueber zwei Raumformen
mit constanter psitiver Krümmung’ adlı makalesinde ortaya çıkmıştır. Timelike ve
spacelike
xi
açıları Klein’ ın 1871 yılındaki ‘Uber die sogenannte Nicht-Eucklidische geometrie’
makalesinde tanımlandı. Hiperbolik yay uzunluğu elemanları Killing’ in 1880 yılındaki
‘Die rechnung in den
Nicht-Eucklidische Raumformen’ makalesinde görüldü.
Hiperbolik doğru parçasının Lorentz uzunluğu, Yaglom tarafından ‘A simple NonEuclidean geometry and physical basis’ çalışmasıyla tanımlandı.
2- boyutlu hiperbolik koordinatlar Labachevski’ nin ‘On the principles of
geometry’ makalesinde ortaya çıktı. Cox ise koordinatları, ‘Homogeneous coordinates
in imaginary geometry’ makalesinde tanımladı.
Saccheri 1733 yılında hiperbolik üçgenin açılarının toplamının iki dik açıdan
daha fazla olduğunu ispatladı. Kosinüs ve sinüs ile ilgili kurallarına benzer formüller,
Lobachevski tarafından çıkarıldı. Hiperbolik ve Küresel trigonometriler arasındaki
dualliği olarak Lambert tarafından geliştirildi. Daha sonraki yıllarda iki komşu açılı
dörtgenler,küresel trigonometrik formüller, dik açılı hiperbolik altıgenler için formüller
çalışılmıştır.
1.2. Materyal Yöntem
RATCLIFFE, J. G., ‘Foundations of Hyperbolic Manifolds’, Department
Of Mathematics, Vanderbilt University, 1994 ve LEE, J. M. , ‘Riemann Manifolds An
Introduction to Curvature’, Department of Mathematics, University of Washington
Seattle, 1991 kitaplarını temel alarak diğer makale ve tezlerden yararlanarak
oluşturuldu.
1
BÖLÜM 1
LORENTZ-MINKOWSKI UZAYI
1.1. Temel Yapılar
Bu bölümde, öncelikle Lorentz-Minkowski uzayının metrik yapısı tanımlanarak,
üzerindeki vektörel yapılardan bahsedilecektir.
Tanım 1.1.1. (simetrik bi-lineer form)
V sonlu boyutlu reel vektör uzayı olsun.
, :V × V → IR
bi-lineer fonksiyonu ∀ v,w ∈ V için
→ →
→ →
v, w =
w, v
özelliğini saglayan
,
ye V
üzerinde bir simetrik bi-lineer form denir.[17]
Tanım 1.1.2. V,vektör uzayı üzerinde bir simetrik bi-lineer form , olsun. Bu takdirde
→
→
→ →
i) ∀ v ∈ V, v ≠ 0 için v , v > 0 ise , bi-lineer formu pozitif tanımlı,
→
→
→ →
ii) ∀ v ∈ V, v ≠ 0 için v , v < 0 ise , bi-lineer formu negatif tanımlı,
→
→
→ →
→
→
→ →
iii) ∀ v ∈ V, v ≠ 0 için v , v ≥ 0 ise , bi-lineer formu yarı-pozitif tanımlı,
iv) ∀ v ∈ V, v ≠ 0 için v , v ≤ 0 ise , bi-lineer formu yarı-negatif tanımlı,
→
→ →
→
→
v) ∀ v ∈ V, v , v = 0 için v = 0 oluyorsa , bi-lineer formuna non-dejenere,aksi
halde dejenere denir. [17]
2
Tanım 1.1.3. (bi-lineer formun indeksi)
, , V üzerinde simetrik bi-lineer form ve W da V nin bir altuzayı olsun. , nin W
üzerinde kısıtlanışı ,
,
W
W
olmak üzere
: W × W → IR
,
negatif tanımlı olacak şekilde en büyük boyutlu W altuzayının boyutuna
simetrik bi-lineer formun indeksi denir. Eger , nin indeksi v ise 0 ≤ v ≤ boy V dir.
[17]
Tanım 1.1.4.(metrik tensör)
M, türevlenebilir ( C ∞ sınıfından) manifold ve
, : χ (M) × χ (M) → C ∞ (M,IR)
→
→
→ →
( x , y ) ֏ x, y
şeklinde tanımlanan simetrik, bi-lineer ve non-dejenere metrik fonksiyonuna M
üzerinde bir metrik tensör denir. Bu metrik tensörün indeksi M manifoldunun indeksi
olarak ifade edilir.
M bir C ∞ sınıfından manifold olmak üzere, χ (M) de tanımlı
,
iç çarpım
→
→
fonksiyonu, M nin her bir tanjant uzayına bir iç çarpım indirger, öyleki X , Y ∈ χ (M)
→
→
ve p ∈ M için X p , Yp ∈ TM (p) dir. Böylece
,
p
: TM (p) × TM (p) → IR
simetrik bi-lineer, non-dejenere dönüşüm tanımlayan
,
p
fonksiyonuna TM (p)
üzerinde bir metrik tensör denir.
Tanım 1.1.5. M bir C ∞ sınıfından manifold ve
,
de M üzerinde sabit indeksli bir
metrik tensör olmak üzere (M, , ) ikilisine bir yarı-Riemann manifoldu denir.
M nin indeksi v olmak üzere 0 ≤ v ≤ n=boy M için, v=0 ise M ye bir Riemann
manifoldu, v=1 ve n ≥ 2 durumunda ise M ye Lorentz manifoldu denir.
3
Tanım 1.1.6. IR 4 , 4 boyutlu standart reel vektör uzayı üzerinde ∀ p ∈ IR 4 ve
V p , W p ∈ Tp ( IR 4 ) olmak üzere
V p ,W p = - v1w1 + v2 w2 + v3 w3 + v4 w4
eşitliğiyle verilen v-indeksli metrik tensörle elde edilen uzaya yarı-Öklidyen uzay denir
ve IRv4 ile gösterilir. Burada sırasıyla vi ve wi ler V p ve W p tanjant vektörlerinin
bileşenleridir.
Özel olarak v=1 ve n=4 durumunda ise E14 4-boyutlu Minkowski uzayı adını alır.
Metrik tensör ise Lorentz metriği olarak adlandırılır.
Minkowski 4-uzayında iç çarpım özelliklerini sağlatalım:
, : E14 × E14 → IR
→ →
(u , v) ֏
→ →
→ →
u, v = - u1v1 + u2v2 + u3v3 + u4v4
→ →
i) u, v = v, u = u ⋅ v (simetrik özelliği)
carpmayagöre
değişme
→ →
u, v = - u1v1 + u2v2 + u3v3 + u4v4
=
içcarpım
tan ımından
=
→ →
- v1u1 + v2u2 + v3u3 + v4u4
→ →
v, u
→
ii) a , b ∈ IR ve u, v , w ∈ E14
→
→ →
→ →
→ →
a u + b v , w = a u, w + b
→
v, w
→ →
a u + b v , w = -( au1 + bv1 ) w1 +( au 2 + bv2 ) w2 +( au3 + bv3 ) w3 +( au 4 + bv4 ) w4
= a (- u1v1 + u2v2 + u3v3 + u4v4 )+ b (- v1u1 + v2u2 + v3u3 + v4u4 )
→ →
→ →
= a u, w + b v, w
4
→
Tanım 1.1.7. X = ( x1 ,…, x4 ) ∈ E14 olsun. Eğer
→
→
→
ise X timelike vektör,
X,X < 0
i)
→
→
→
→
→
ii) X , X > 0 veya X = 0 ise X spacelike vektör,
→
→
→
→
→
iii) X , X = 0 ve X ≠ 0 ise X null vektör
olarak ifade edilir. [17]
→
→
Tanım 1.1.8. E14 Minkowski 4-uzayında ∀ X , Y ∈ E14 için
→ →
X ,Y = 0
→
→
ise X ve Y vektörleri Lorentz anlamında diktir (ortogonaldir) denir.
TEOREM 1.1.1. x,y ∈ E14 sıfır olmayan Lorentz ortogonal vektörler olsun. x timelike
vektör ise y spaceliketır.
2
ĐSPAT: x timelike ⇒ x = - x, x
x, y ∈ E14 Lorentz ortogonal ⇔ x, y =0
2
2
2
x, y = x +2 x, y + y =0
2
- x, x + 0 + y =0
2
y = x, x
dir. Bu durumda y spacelike vektördür.
Tanım 1.1.9. E14 Minkowski 4-uzayının bütün timelike vektörlerin kümesi τ olsun.
Böylece ∀ u ∈ τ için
→
→ →
→
→
C( u )= x ∈ τ : u , x < 0 = x ∈ E14 : g ( x − u , x − u ) < 0
→
biçiminde tanımlanan C( u ) kümesine u yu içeren E14 ün time-konisi denir. [17]
5
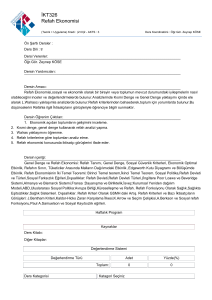
τ
z
C ışık konisi
y
Space-like
x
Time-like
Light-like
Şekil 1.1: Minkowski uzayının tanımlanış özelliği
→
→
Tanım 1.1.10. X = ( x1 ,…, x4 ) ∈ E14 için X vektörünün normu
→
→
X =
X,X
→
ile tanımlanır. [17]
→
→
TEOREM 1.1.2. X = ( x1 ,…, x4 ) ≠ 0 ve X ∈ E14 olsun. Bu taktirde
→
i) X > 0 dır.
→
→
ii) X = 0 ⇔ X bir null vektördür.
→ 2
→
→
→
iii) X bir timelike vektör ⇒ X = - X , X
→ 2
→
→
dir.
→
iv) X bir spacelike vektör ⇒ X = X , X
→
ĐSPAT: i) X =
→
ii) X =0 ⇔
→
→
X,X
→
→
X,X
→
→
dir.
→
→
⇒ X , X ≥ 0 ve X ≠ 0 olduğundan X >0 dır.
=0 ⇔
→
→
X, X
=0 ⇔
→
→
X , X =0
→
→
→
⇔ X , X =0 ∧ X ≠ 0
tan ım1.1.7
iii
→
⇔
X null vektördür.
6
→ 2
→
→
→
→ 2
→
→
→
X timelike
=
iii) X = X , X
→
X spacelike
=
iv) X = X , X
→
- X,X
→
→
X,X
dir.
Tanım1.1.11. (V, , ) Minkowski uzayı olsun. W ⊂ V altuzayı göz önüne alınırsa
i)
,
ii)
,
iii) ,
W
W
W
: W × W → IR pozitif ise W ya spacelike altuzayı
: W × W → IR negatif ise W ya timelike alt uzayı
: W × W → IR dejenere ise W ya lightlike altuzayı
denir. [17]
→
→
TEOREM 1.1.3. E14 Minkowski 4-uzayında X ve Y iki timelike vektörü olsun. Bu
durumda
→ →
→
→
≥ X Y
X ,Y
eşitsizliği vardır. Bu eşitsizlikte eşitlik durumunun sağlanması için gerek ve yeter şart
→
→
X ve Y vektörlerinin lineer bağımlı olmasıdır. [10]
→
→
ĐSPAT: Y= aX + Y , Y ∈ X ⊥ , Y timelike vektör
→
→
→ →
Y ,Y = a 2 X , X + Y ,Y
<0
dır. Bu durumda
2
→
→
2
→ →
→ →
= Y ,Y − Y ,Y X , X
X ,Y = a 2 X , X
≥ Y ,Y
X, X
→ 2 → 2
= X
Y
Böylece
→ →
X ,Y
olur.
→
→
≥ X Y
7
→ →
→
→
Y , Y ≥ 0 ve X , X < 0 olduğundan bu teoremin eşitliği sadece ve sadece
→ →
→
Y , Y =0 ⇒ Y =0 yani Y= aX olur. Bu durumda X ve Y vektörleri lineer bağımlıdır.
1.2. E14 Minkowski 4-uzayında Açı ve Hareket Kavramı
Şimdi, vektörler arasındaki açı kavramını ele alacağız. Önceki bölümde bahsedilen
timelike,spacelik ve lightlike vektörler için ayrı ayrı açısal durumu inceleyeceğiz.
Bununla ilişkili olarak Lorentz dönüşümünü inceleyip açıca uzayın baz yapısını
oluşturacağız. Bunun için öncelikle aşağıdaki teoremi verelim.
→
→
TEOREM 1.2.1. E14 Minkowski 4-uzayında x ve y
timelike vektörleri aynı
timekonisinin elemanı ise
→ →
→
→
x , y = − x y coshθ
olacak şekilde bir tek θ ≥ 0 reel sayısı vardır. [10]
ĐSPAT: x ve y
lineer bağımsız time-like vektörleri düşünülürse, X =< x, y > time-like bir
düzlem olur. x ve y iki lineer bağımsız light-like vektörlerse, x + y veya x − y timelike vektördür çünkü;
x ± y , x ± y = ∓2 x , y
dir ve her iki vektörün time-like olmasına bağlı olarak
x, y ≠ 0 olduğuna göre a ve b üzerindeki eşitlik şu şekildedir:
ax + by, ax + by = a 2 x, x + b 2 y, y + 2ab x, y = 0
a ≠ 0 olur. b = λ denirse
a
x , x + 2λ x , y + λ 2 y , y = 0
elde edilir
Bu λ değişkenine göre bir denklemdir ve çözümü vardır. Dolayısıyla denklemin
diskriminantı pozitif olmalıdır. O halde,
x, y
2
> x, x y , y
8
dir. Bu, x ve y lineer bağımsız olduğu durumda eşitsizliği gösterir. Bunun yanı sıra; eğer
orantılılarsa, o zaman eşitlik yakalanmış olur. Böylece,
< x, y > 2
≥1
(− < x, x >)(− < y, y >)
(1.1)
elde edilir. x ve y aynı time-like koni içindelerse, x, y < 0 olur ve (1.1) ifadesi şunu
gösterir:
− < x, y >
≥1
− < x, x > − < y , y >
Hiperbolik kosinüs fonksiyonu cosh : [0, ∞ ) → [1, ∞ ) birebir olduğundan burada unik bir
sayı oluşur ki
cosh θ =
− < x, y >
− < x, x > − < y , y >
olur.
→
TANIM 1.2.1. Yukarıdaki
→
verilen θ reel sayısına x ve y
timelike vektörleri
arasındaki Lorentz timelike açı denir. [10]
TEOREM 1.2.2. x ve y, E14 aynı uzayda sıfır ve spacelike olmayan vektörler olsun. Bu
durumda x, y ≤ 0 olur ve eşitlik durumu ancak ve ancak x ve y lineer bağımlı lightlike
vektörleri için sağlanır
ĐSPAT: . x ve y orantılıysa, bu ortogonal olduklarını gösterir. Farzedelim ki x, y
ortogonal olsun. E14 =< E 4 > ⊥ ⊕ < E 4 > ayrışımında; x = w + u ,
y = w + v yazılabilir.
x, y = 0 olduğundan ve her iki vektör de light-like olduğundan dolayı,
u , v + w, w + u , w + v, w = 0
u , u + w, w + 2 u , w = 0
v, v + w, w + 2 v, w = 0
olur. Bu üç eşitlik birleştirilirse; | u |2 + | v |2 −2 u , v = 0 eşitliği elde edilir, yani,
| u − v |2 = 0 . Böylece; u = v olur, çünkü u − v bir space-like vektördür ( u − v ∈< w > ⊥ ).
Buradan x = y sonucu çıkar.
9
Eğer iki vektörde time-like ise,
x, y ≠ 0 olup; < y > ⊥ space-like bir altuzay
olduğundan E14 =< y > ⊥ ⊕ < y > eşitliğini kullanarak, y = u + λy yazılır. Bundan
dolayı;
x, y = y , u + λ y , y = λ y , y
dir.
u , v = 0 olursa, λ = 0 ve
x=u
vektörü space-like olurdu. Bu bir çelişkidir. Bundan dolayı; her iki vektör de light-like
olmalıdır.
x, y ∈ X ∩ X ⊥ ise;
x, y = 0 olur. Buradan x ve y lineer bağımlıdırlar. Bu da;
dim( X ∩ X ⊥ ) ≤ 1 olduğunu kanıtlar. Boyut tam olarak, 0 ise; E14 = X ⊥ ⊕ X ve bundan
dolayı E14 ün herhangi bir vektörü light-like olacaktır.
TEOREM 1.2.3. x , y ∈ E14 sıfır ve spacelike olmayan vektörler ve t > 0 ise, bu
durumda
i)
tx vektörleri x gibi aynı boyut ve benzerliğe sahiptir.
ii)
x+y, x ve y ye aynı boyutta spacelike olmayan vektörlerdir, ayrıca x+y
lightlike vektörlerdir ⇔ x ve y lineer bağımlı lightlike vektörlerdir.
ĐSPAT: (i) tx = t x ve (tx )1 =t x1 dikkate aldığımızda tx ve x aynı benzerlik ve boyuta
sahiptir.
2
2
(ii) x + y = x +2 x, y + y
2
≤0
Bunun eşitlik durumu ancak ve ancak x =0, y =0 ve x, y =0 olduğunda sağlanır.
Böylece x+y lightlike ⇔ x ve y lineer bağımlı lightlike vektörlerdir.
SONUÇ 1.2.1. Bütün pozitif (negatif) timelike vektörlerin kümesi IR n in konveks
altkümesidir.
ĐSPAT: x, y ∈ IR n pozitif (negatif) timelike vektörler ve 0 ≤ t ≤ 1 ise bu durumda
(1-t)x+ty pozitif (negatif) timelike olduğu görülür. Bu durumda IR n de konveks
altkümedir.
TANIM 1.2.2. ∀ x, y ∈ IR n için
φ : IR n → IR n fonksiyonu Lorentz dönüşümdür ⇔ φ ( x), φ ( y ) = x, y dir.
IR n in {V1 , V2 ,..., Vn } bazına Lorentz ortonormal denir ⇔ V1 , V1 =-1 ∧ Vi , V j = δ ij dir.
IR n in {e1 , e2 ,..., en } standart bazı, Lorentz ortonormaldir.
10
TEOREM 1.2.4.
φ : IR n → IR n fonksiyonu lorentz dönüşümdür ⇔ φ fonksiyonu
lineer ve {φ (e1 ),φ (e2 ),..., φ (en )}, IR n in Lorentz ortonormal bazıdır. [10]
ĐSPAT: φ , IR n in Lorentz dönüşümü olsun. Bu durumda
φ (e1 ), φ (e1 ) = e1 , e1 = -1
ve
φ (ei ), φ (e j ) = δ ij
dir. Bu açıkça φ (e1 ), φ (e2 ),..., φ (en ) in lineer bağımsız olduğunu gösterir. Dolayısıyla,
{φ (e1 ), φ (e2 ),..., φ (en )}
IR n in Lorentz dönüşümüdür.
x ∈ IR n olsun. Bu durumda c1 , c2 ,..., cn ∈ IR n katsayılarıdır. Öyleki
n
φ ( x) = ∑ ciφ (ei )
i =1
olur. {φ (e1 ), φ (e2 ),..., φ (en )} bir Lorentz ortonormal baz olduğunda
- c1 = φ ( x), φ (e1 ) = x, e1 = - x1
ve ∀ j > 1 için
c j = φ ( x ), φ (e j ) = x, e j = - x j
olur. Bu durumda
n
n
i =1
φ ∑ xi ei = ∑ xiφ (ei )
i =1
olduğundan dolayı φ lineerdir.
Diğer taraftan φ lineer ve {φ (e1 ), φ (e2 ),..., φ (en )} , IR n in Lorentz ortonormal bazı
olduğunu kabul edelim. O halde,
n
n
j =1
φ ( x), φ ( y ) = φ ∑ xi ei , φ ∑ y j e j
i =1
n
=
n
∑ x φ (e ), ∑ y φ (e )
i
i
i =1
=
j
j
j =1
n
n
i =1
j =1
∑∑
xiφ (ei ), y jφ (e j )
=- x1 y1 + x2 y2 + x3 y3 +…+ xn yn
= x, y
11
olduğundan dolayı φ , Lorentz dönüşümdür.
TANIM 1.2.3 . A, n × n tipinde reel matrise Lorentz denir ⇔
A: IR n → IR n
birleşmeli,lineer dönüşüm Lorentzdir.
x ֏ A(x)=Ax
Bütün n× n tipindeki Lorentz matrislerin çarpımlarıyla oluşan küme, O(1,n-1)
grubunu oluşturur ve buna n× n matrisinin Lorentz grubu denir. [10]
TEOREM 1.2.5. A, n× n tipinde reel matris ve J=diag(-1,1,1,…,1) şeklinde tanımlanan
n× n tipinde köşegen matris olsun. Bu durumda aşağıdakiler denktir:
(1) A matrisi Lorentzdir.
(2) A formunun sütunları IR n in Lorentz ortonormal bazıdır.
(3) A matrisi At JA=J eşitliğini sağlar.
(4) A matrisi AJ At =J eşitliğini sağlar.
(5) A formunun satırları IR n in Lorentz ortonormal bazıdır. [10]
A, Lorentz matrisi olsun. At JA=J iken (det A) 2 =1 olur. Böylece det A= ± 1 dir.
SO(1,n-1), O(1,n-1) deki iki indeksin altgrubudur. SO(1,n-1) grubuna özel Lorentz
grubu denir. IR n deki bütün timelike vektörler kümesi, pozitif ve negatif timelike
vektörler olarak iki bağlantılı bileşene sahiptir. A Lorentz matrisi pozitif(negatif) olarak
ifade edilir ⇔ A, pozitif(negatif) timelike vektörleri pozitif(negatif) timelike vektörlere
dönüştürür. Mesela J matrisi negatiftir. Lorentz matrisi ya pozitiftir ya da negatiftir.
PO(1,n-1),
O(1,n-1) de bütün pozitif matrislerin kümesi olsun. Bu durumda
PO(1,n-1), O(1,n-1) deki iki indeksin altgrubudur. PO(1,n-1), pozitif matrisin grubuna,
Lorentz pozitif grup denir. Aynı şekilde PSO(1,n-1), SO(1,n-1) deki pozitif matrislerin
kümesi olsun. Bu durumda PSO(1,n-1), SO(1,n-1) deki iki indeksin altgrubudur.
PSO(1,n-1) grubuna pozitif özel Lorentz grup denir.[10]
TEOREM 1.2.6. M nin her boyutu için, IR n in m boyutlu timelike altvektör uzayının
kümesinde PO(1,n-1) in doğal hareketi geçişlidir. [10]
ĐSPAT: V; IR n in m boyutlu timelike altvektör uzayı olsun. {e1 , e2 ,..., em } vektörleri
tarafından gerilen IR n in altuzayı IR m i belirleyelim. Bu, PO(1,n-1) deki A yı yani
A( IR m )=V olduğunu göstermek, ispat için yeterlidir. IR n in {u1 , u2 ,..., un } bazı var
öyleki u1 , V deki pozitif timelike vektörü ve {u1 , u 2 ,..., u m } , V için bir baz seçelim.
12
w1 = u1
olsun. bu durumda
u1
w1 , w1 = -1 dir. v2 = u2 + u 2 , w1 w1 dir. Bu durumda
u1 , u2 lineer bağımsız olduğundan u2 sıfır değildir. Dahası,
w, v2 = w,u2 + u2 , w1
w1 , w1 =0
olur. Bu yüzden lorentz ortogonal vektörler ve u timelike vektör olduğundan v2
spaceliketır(teorem 1.1.1.). Bu şekilde devam edersek;
w2 = v2
v2
v3 = u3 + u3 , w1 w1 - u3 , w2 w2
⋮
vn = u n + u3 , w1 w1 - u3 , w2 w2 -…- un , wn −1 wn −1
wn =
vn
vn
{w1, w2 ,..., wn },
olsun. Bu durumda
{w1, w2 ,..., wn },
IR n uzayının Lorentz ortonormal bazını ve
V nin bazını elde ederiz. A; w1 , w2 ,..., wn sütunları olan n× n tipinde
matris olsun. Bu durumda A matrisi, Teorem 1.2.5 kullanarak Lorentz’dir ve
A( IR m )=V; dahası A pozitiftir çünkü A e1 = w1 pozitif timeliketır.
TEOREM 1.2.7. x, y ∈ E14 pozitif(negatif) timelike vektörler olsun. bu durumda
x, y ≤ x y eşitliğiyle ⇔ x ve y lineer bağımlıdır. [10]
ĐSPAT: PO(1,n-1) de bir A alalım yani Ax=t e1 olur. A, Lorentz iç çarpımını
korumasıyla x ve y yi Ax ve Ay yerine koyabiliriz. Bu durumda
x
2
2
2
2
y = - x1 (− y1 + y ) = x1 y1 − x1 y ≤ x1 y1 = x, y
2
2
2
2
2
2
2
2
eşitliğiyle ⇔ y =0, yani y= y1e1 dir. x, y ≤ − x1 y1 < 0 iken x, y ≤ x y eşitliğiyle
⇔ x ve y lineer bağımlıdır.
TEOREM 1.2.8. x, y ∈ E14 pozitif(negatif) timelike vektörler olsun. Bu durumda
x, y = x y cosh θ
olan tek bir θ > 0 reel sayısı vardır.[10]
13
TANIM 1.2.4. Yukarıdaki teoremde verilen θ reel sayısına x,y timelike vektörleri
arasındaki Lorentz timelike açı denir. [10]
TANIM 1.2.5. x, y ∈ E14 vektörleri ve x,y arasındaki Lorentz timelike açısı θ olsun. Bu
durumda
d E 4 ( x, y ) = θ (x,y)
1
reel sayısına x ve y arasındaki uzaklık denir. [10]
− 1 0 0 0
0 1 0 0
4
olsun. Bu durumda
TANIM 1.2.6. x, y, z ∈ E1 vektörleri ve J =
0 0 1 0
0 0 0 1
x ∧ y ∧ z = J ( x, y , z )
olarak ifade edilen çarpıma Lorentz vektörel çarpım denir.
x, x ∧ y ∧ z = x, J ( x ∧ y ∧ z ) = x ⋅ ( x ∧ y ∧ z ) = 0
y, x ∧ y ∧ z = y, J ( x ∧ y ∧ z ) = y ⋅ ( x ∧ y ∧ z ) = 0
z, x ∧ y ∧ z = z , J ( x ∧ y ∧ z ) = z ⋅ ( x ∧ y ∧ z ) = 0
olur. Böylece x ∧ y ∧ z , hem x hem y hem de z ye Lorentz ortogonaldir.
TEOREM 1.2.9. x, y, z, w ∈ E14 vektörleri ise bu durumda
i) ( x ∧ y ) ∧ z = - z ∧ ( x ∧ y )
ii) ( x ∧ y ∧ z ), w = − det( x, y, z , w)
ĐSPAT: i) ( x ∧ y ) ∧ z = −
− e1
e2
e3
e4
x1
x2
x3
x4
y1
y2
y3
y4
z1
z2
z3
z4
x2
x3
x4
x1
x3
x4
= e1 y2
y3
y4 + e2 y1
y3
y4
z2
z3
z4
z1
z3
z4
x1
x2
x4
x1
x2
x3
− e3 y1
y2
y4 + e4 y1
y2
y3
z1
z2
z4
z2
z3
z1
= ( z2 ( x4 y3 − x3 y4 ) − z3 ( x2 y4 − x4 y2 ) + z4 ( x2 y3 − x3 y2 ) )e1
14
+ ( z1 ( x3 y4 − x4 y3 ) − z3 ( x1 y4 − x4 y1 ) + z4 ( x1 y3 − x3 y1 ) )e2
- ( z1 ( x2 y4 − x4 y2 ) − z2 ( x1 y4 − x4 y1 ) + z4 ( x1 y2 − x2 y1 ) )e3
+ ( z1 ( x2 y3 − x3 y2 ) − z2 ( x1 y3 − x3 y1 ) + z3 ( x1 y2 − x2 y1 ) )e4
z2
z3
z4
z1
z3
z4
= −e1 x2
x3
x4 − e2 x1
x3
x4
y2
y3
y4
y1
y3
y4
z1
z2
z4
z1
z2
z3
+ e3 x1
x2
x4
− e4 x1
x2
x3
y1
y2
y3
y1
y2
y4
− e1
e2
e3
e4
z1
z2
z3
z4
x1
x2
x3
x4
y1
y2
y3
y4
=
= − z ∧ ( x ∧ y)
?
ii) x ∧ y ∧ z , w = − det( x, y, z , w)
− w1 [x2 ( y3 z 4 − z3 y4 ) − x3 ( y2 z 4 − z 2 y4 ) + x4 ( y2 z3 − z 2 y3 )]
+ w2 [x1 ( y3 z 4 − z3 y4 ) − x3 ( y1 z 4 − z 2 y1 ) + x4 ( y1 z3 − z1 y3 )]
x ∧ y ∧ z, w =
− w [x ( y z − z y ) − x2 ( y1 z 4 − z1 y4 ) + x4 ( y1 z 2 − z1 y2 )]
3 1 2 4 2 4
+ w [x ( y z − z y ) − x ( y z − z y ) + x ( y z − z y )]
4 1
2 3
2 3
2
1 3
1 3
3
1 2
1 2
x2
x3
x4
x1
x3
x4
= − w1 y2
y3
y4 + w2 y1
y3
y4
z2
z3
z4
z1
z3
z4
x1
x2
x4
x1
x2
x3
− w3 y1
y2
y4 + w4 y1
y2
y3
z1
z2
z4
z2
z3
z1
= − det( x, y, z , w)
SONUÇ 1.2.2. x, y ∈ E14 lineer bağımsız, pozitif (negatif) timelike vektörleri ise bu
durumda x ∧ y spacelike vektördür ve
x ∧ y = − x y sinh θ
dır.
15
2
2
ĐSPAT: x ∧ y = x, y − x
= x
= x
= x
2
y
2
2
y cosh 2 θ − x
2
2
y (cosh 2 θ − 1)
2
y sinh 2 θ
2
y
2
2
2
cosh θ ( x, y ) = − x, y olduğundan x ∧ y = − x y sinh θ olur.
SONUÇ 1.2.3. x, y ∈ E14 spacelike vektörler ise bu durumda
i) x, y < x
y ⇔ x ∧ y timelike
ii) x, y = x
y ⇔ x ∧ y lightlike
iii) x, y > x
y ⇔ x ∧ y spacelike
olur.
2
2
ĐSPAT: x ∧ y = x, y − x
2
y
2
ifadesinden açık olarak görülür.
TEOREM 1.2.10. d E 4 uzaklık fonksiyonu, E14 üzerinde metriktir. [10]
1
ĐSPAT: d E 4 fonksiyonu negatif olmayan,simetrik ve nondejeneredir.
1
IR n +1 in pozitif Lorentz dönüşümü H n hiperbolik uzayı üzerinde uzaklığı korur. x, y, z
vektörleri en çok 3 boyuttaki IR n +1 altvektör uzayını gerer. x, y, z yi e1 , e2 , e3 tarafından
gerilen IR n +1 in altuzayı içindedir. Diğer bir deyişle n=2 olarak kabul edelim.
x ∧ y = sinh θ ( x, y ) ve y ∧ z = sinh θ ( y, z )
olduğunda y, hem x ∧ y hem de y ∧ z ye Lorentz ortogonalken y ve ( x ∧ y ) ∧ ( y ∧ z )
vektörleri lineer bağımlıdır. Böylece ya sıfır ya da timeliketır. Bu durumda
( x ∧ y ), ( y ∧ z ) ≤ x ∧ y y ∧ z
eşitsizliğini elde ederiz. Elde edilenleri düzenlediğimizde
cosh (θ ( x, y ) + θ ( y, z )) =cosh θ ( x, y ) cosh θ ( y, z ) +sinh θ ( x, y ) sinh θ ( y, z )
= x, y y , z + x ∧ y y ∧ z
≥ x, y y, z + x ∧ y , y ∧ z
= x, y y , z + ( x, z y , y − x, y y , z )
16
= - x, z
= cosh θ ( x, z )
elde ederiz. Bu yüzden
θ ( x, z ) ≤ θ ( x, y ) + θ ( y , z )
olur.
H n üzerinde d H metriğine hiperbolik metrik denir. d H tarafından belirlenen H n in
metrik topolojisi, d E (x,y) = x − y Öklid metriğiyle tanımlanan metrik topolojisiyle H n
üzerinde tanımlanan metrik topolojisi aynıdır. Bu uzaya hiperbolik n-uzay denir. H n
den kendisine olan izometriye hiperbolik izometri denir.
TEOREM 1.2.11. IR n +1 uzayının her pozitif Lorentz dönüşümü, H n uzayının bir
izometrisine kısıtlanır ve H n uzayının her izometrisi, IR n +1 uzayının bir tek pozitif
Lorentz transformasyonuna genişler. [10]
ĐSPAT: φ : H n → H n dönüşümü izometriktir ⇔ Dönüşüm, H n üzerinde Lorentz iç
çarpımını korur.
Böylece IR n +1 uzayının pozitif bir Lorentz dönüşümünü, H n uzayının izometrisine
kısıtlar.
Diğer taraftan φ : H n → H n izometri olduğunu varsayalım. φ , e1 i sabitlediğini
düşünelim. φ nin bileşenleri φ1 ,φ2 ,..., φn +1 olsun. Bu durumda
φ1 (x) = - φ (x) e1
= - φ ( x),φ (e1 )
= - x,e1
= x1
olur. Bu yüzden
φ (x) = ( x1 ,φ2 ( x),...,φn +1 ( x) )
dir.
p: H n → IR n , x = ( x2 ,..., xn +1 ) olan p(x) = x ile tanımlansın. Bu durumda p,
bijeksiyondur.
φ : IR n → IR n , φ (u)= (φ2 ( p −1 (u )),...,φn ( p −1 (u ))) şeklinde tanımlasın. Bu durumda
∀x ∈ H n için φ ( x ) = φ (x) dir. φ ( x),φ ( y ) = x, y olduğunda
17
- x1 y1 + φ ( x ) φ ( y ) = - x1 y1 + x y
olur.
Böylece φ ( x ) φ ( y ) = x y dir. Bundan dolayı φ , bir ortoğonal dönüşümdür. n× n
tipinde ortoğonal A matrisi vadır yani ∀u ∈ IR n için Au = φ ( u ) olur.
1 0 ... 0
ˆA = 0
matris olsun. Bu durumda  , pozitif Lorentzdir ve ∀x ∈ H n için
⋮
A
1
0
 = φ (x) dir.
φ , H n uzayının keyfi bir izometrisi olduğunu farzedelim. B ∈PO(1,n) yani
B φ ( e1 ) = e1 olduğundan B φ , IR n +1 uzayının pozitif dönüşümüne genişletirken bu
durum φ için de doğrudur. C,D ∈PO(1,n) ve φ yi genişleteceğimizi farz edelim. Bu
durumda D −1C , H n uzayının her noktasını sabitler. H n uzayı, IR n +1 uzayının herhangi
bir altvektör uzayını içermezken D −1C , IR n +1 uzayının hepsini sabitlediğinden içerir.
Böylece D=C olur. Bu da φ yi IR n +1 uzayının pozitif Lorentz dönüşümüne genişletir.
SONUÇ 1.2.4. Ι ( H n ) hiperbolik izometrilerinin grubu, PO(1,n) pozitif Lorentz
grubuna izomorfiktir. [10]
TANIM 1.2.7. H n uzayının hiperbolik doğrusu, IR n +1 uzayının 2-boyutlu timelike
altvektör uzayıyla H n uzayının kesişimidir.
x ve y, H n uzayının ayrık noktaları olsun. Bu durumda x ve y, IR n +1 uzayının 2boyutlu timelike altuzayını gerer ve böylece
L(x,y) = H n ∩ V ( x, y )
hem x hem de y yi içeren H n uzayının tek hiperbolik doğrusudur. [10]
TANIM 1.2.8. x, y ∈ IR n +1 vektörleri Lorentz ortonormaldir ⇔
2
2
x = −1 , x, y = 0 ve y = 1 dir. [10]
TEOREM 1.2.12 α : [a, b ] → H n eğrisi olsun. Bu durumda aşağıdakiler denktir:
i) α eğrisi jeodezik yaydır.
ii) x, y ∈ IR n +1 Lorentz ortonormal vektörleridir. Bu yüzden
18
α (t) = (cosh (t-a) x+ sinh (t-a) y )
dir.
iii) α eğrisi, α ′′ − α = 0 diferansiyel denklemini gösterir. [10]
ĐSPAT: A , IR n +1 uzayının bir Lorentz dönüşümü olsun. O halde ( Aα )′ = Aα ′ dür.
Bu durumda α , (iii) denkliğini ancak Aα olduğunda gösterir. Dolayısıyla Lorentz
dönüşümünü kullanarak gösteririz. α nın jeodezik yay olduğunu farz edelim. t, [a, b]
aralığında olsun. Bu durumda
θ (α (a ),α (b)) = b − a
= (t − a ) + (b − t )
= θ (α (a ),α (t )) + θ (α (t ),α (b))
olur. Böylece α (a ),α (b),α (t ) hiperbolik kolineerdir. Dolayısıyla α nın görüntüsü
H n uzayının L hiperbolik doğrusundadır.
Bu yüzden n=1 olduğunu kabul edebiliriz. O halde,
cosh s sinh s
sinh
s
cosh
s
formunu Lorentz dönüşümüne uygulayarak α (a ) yı e1 bazına dönüştürebiliriz.
O halde,
e1 . α (t ) = - α (a ) α (t )
= cosh θ (α (a ),α (t ))
=cosh (t-a)
olur. Böylece e2α (t ) = ± sinh (t − a) dır. α sürekliyken ∀ t için “+” veya “-” işareti elde
edilir. Bundan dolayı
α (t ) = (cosh (t-a)) e1 + (sinh (t-a)) ( ∓ e2 )
olur. O halde (i) ⇒ (ii) olduğunu göstermiş oluruz.
x, y ∈ IR n +1 Lorentz ortonormal vektörler olsun . Bu durumda
α (t ) = (cosh (t-a)) x + (sinh (t-a)) y
dir. a ≤ s ≤ t ≤ b olacak şekilde
cosh θ (α ( s ),α (t )) = - α ( s ),α (t )
= cosh ( s − a ) cosh (t − a ) - sinh ( s − a ) sinh (t − a )
= cosh(t-s)
19
elde ederiz.
Böylece θ (α ( s ),α (t )) = t-s dir. O halde α , jeodezik yaydır. Dolayısıyla
(ii) ⇒ (i) olduğunu ifade etmiş oluruz.
x,y ∈ IR n +1 Lorentz ortonormal vektörler olsun . Bu durumda
α (t ) = (cosh (t-a)) x + (sinh (t-a)) y
dir. α ′′ (t) = (cosh (t-a)) x + (sinh (t-a)) y olduğundan α ′′ − α = 0 olur. Dolayısıyla
(ii) ⇒ (iii) olur.
(iii) nin varlığını kabul edelim. Bu durumda
α (t ) = (cosh (t-a)) α (a ) + (sinh (t-a)) α ′(a )
dır. α (t ),α (t ) = -1 denkleminin diferansiyellenmesinde
α ′(t ),α (t ) + α (t ),α ′(t ) = 0 ⇒ 2 α (t ),α ′(t ) = 0
⇒ α (t ),α ′(t ) = 0
olduğu görülür. Böylece α (a ),α ′(a ) = 0 olur.
2
α (t ) = (-cosh 2 (t - a) + sinh 2 (t - a)) α ′(a)
2
2
2
olduğundan α (t ) = 1 ise α ′(a) = 1 elde ederiz. Böylece α (a ) , α ′(a ) Lorentz
ortonormaldir. Dolayısıyla (iii) ⇒ (ii) olur.
TEOREM 1.2.13. λ : IR → H n fonksiyonu bir jeodezik doğrudur ⇔ x,y ∈ IR n +1
Lorentz ortonormal vektörleri vardır yani
λ (t ) = (cosh t) x + (sinh t) y
dir. [10]
ĐSPAT: x, y ∈ IR n +1 Lorentz ortonormal vektörleri var olduğunu yani
λ (t ) = (cosh t) x + (sinh t) y olduğunu kabul edelim. Bu durumda λ ′′ − λ = 0
diferansiyel denklemini belirtir. O halde a < b şeklindeki herhangi [a, b] araliğina λ nın
kısıtlanışı, jeodezik yaydır. O halde λ , jeodezik doğrudur.
Diğer taraftan λ , jeodezik doğru olduğunu kabul edelim. λ fonksiyonu λ ′′ − λ = 0
diferansiyel denklemini gösterir. Sonuç olarak
λ (t ) = (cosh t) λ (0) + (sinh t) λ ′ (0)
dır. Dolayısıyla λ (0), λ ′ (0) Lorentz ortonormal olduğunu göstermiş oluruz.
20
SONUÇ
Hn
1.2.5.
α eğrileri jeodeziktir
uzayında
⇔
uzayın
hiperbolik
doğrularıdır[10]
ĐSPAT: H n uzayının her jeodeziğinin hiperbolik doğru olduğunu yukarıda ifade
etmiştik. Diğer tarafını ise; L, H n uzayının hiperbolik doğrusu olsun. n =1 olduğunu
kabul edebiliriz. Bu durumda L = H 1 dir.
λ : IR → H n
t ֏ λ (t ) = (cosh t) e1 + (sinh t) e2
olarak tanımlanır. Bu durumda λ , H 1 uzayı üzerinde jeodezik doğru dönüşümüdür. Bu
yüzden L, bir jeodeziktir.
TANIM 1.2.9. H n uzayının m-hiperbolik düzlemi, IR n +1 uzayının (m+1) boyutlu
timelike altvektör uzayıyla H n uzayının kesişimidir.
H n uzayının 1-hiperbolik düzlemi, H n uzayının hiperbolik doğrusudur. H n
uzayının (n-1) hiperbolik düzlemine H n uzayının hiperdüzlemi denir. [10]
x, y ∈ IR n +1 spacelike vektör olsun. Bu durumda x tarafından gerilen x altvektör
uzayının Lorentz tümleyeni, IR n +1 uzayının n-boyutlu timelike altvektör uzayıdır.
Böylece P = x
L
∩ H n , H n uzayının hiperdüzlemidir. P hiperdüzlemine, x e Lorentz
ortogonal H n uzayının hiperdüzlemidir.
TEOREM 1.2.14. x, y ∈ IR n +1 lineer bağımsız spacelike vektörleri olsun. Aşağıdakiler
birbirine denktir:
(1) x ve y vektörleri x, y ≤ x y denklemini belirtir.
(2) x ve y tarafından gerilen V altvektör uzayı spaceliketır.
(3) Sırasıyla x ve y vektörlerine Lorentz ortogonal olan H n uzayının P ve Q
hiperdüzlemleriyle kesişir.[10]
ĐSPAT: (1) denkliğini sağladığını kabul edelim. Bu durumda s ve t sıfır olmayan reel
sayılar için,
sx + ty
2
=
2
sx + 2 st x, y + ty
2
>
=
2
sx − 2 st x, y + ty
( sx
− ty
) ≥0
2
2
21
elde ederiz. Böylece V spacelike olur.
Diğer yandan (2) denkliğini ele alırsak bu durumda V üzerinde Lorentz iç çarpımı
pozitif tanımlıdır. Dolayısıyla V deki Cauchy eşitsizliğini sağlar ve bu yüzden (1)
denkliği elde edilir. Böylece (1) ve (2) denktir.
olduğundan (2) ve (3) denktir.
TANIM 1.2.15. (Space-like Vektörler Arasındaki Space-like Açı)
x, y ∈ IR n +1 space-like altvektör uzayını geren space-like vektörler olsun.
Bu durumda
x, y ≤ x y
eşitliğini elde ederiz ⇔ x ve y lineer bağımlıdır. Dolayısıyla 0 ve π arasında bir tek
(x,y) reel sayısı vardır yani
x, y = x y cos θ ( x, y )
dir. x ve y arasındaki Lorentz space-like açı θ (x,y) olarak tanımlanır. θ (x,y)=0 ⇔ x
ve y birbirinin pozitif skalar katı olduğu önemlidir. θ (x,y)= π /2 ⇔ x ve y Lorentz
ortagonaldir ve θ (x,y)= π ⇔ x ve y birbirlerinin negatif skalar katıdır.
λ , µ : IR → H n ,
λ (0)= µ (0) olan jeodezik doğrular olsun. Bu durumda
λ ′(0) ve µ ′(0), IR n +1 uzayının bir space-like altvektör uzayını gerer. λ ve µ
arasındaki hiperbolik açı, λ ′(0) ve µ ′(0) arasındaki Lorentz space-like açı olarak
tanımlanır.
P, H n uzayının hiperdüzlemi olsun ve λ :IR → H n bir jeodezik doğru olsun yani
λ (0) ∈ P olsun. Bu durumda L= λ (IR) hiperbolik doğrusu P ile Lorentz ortagonaldir
denir ⇔ P, λ ′(0) e Lorentz ortagonal H n uzayının hiper düzlemidir.
TEOREM 1.2.16. x, y∈ IR n +1 lineer bağımsız spacelike vektörleri olsun.
Bu durumda aşağıdakiler denktir:
(1) x ve y vektörleri
x, y ≥ x y eşitsizliğini sağlar.
(2) V altvektör uzayı, x ve y time-like vektörleriyle gerilir.
(3) Sırasıyla x ve y vektörlerine Lorentz ortagonal H n uzayının P ve Q
hiperdüzlemleri ayrıktır ve ortak bir Lorentz ortagonal hiperbolik doğrusuna
sahiptir. [10]
22
ĐSPAT: x’in skalar katları için ayrı tutulursa V nin her elemanı, bazı t reel sayıları için
tx+y formunun elemanlarının skalar katıdır.
2
2
tx + y = t 2 x + 2t x, y + y
2
ifadesini, t deki bir quadratik polinom olduğuna dikkat edelim. Bu polinom, negatif
değerler alır ⇔ 4( x, y
)
2
−4 x
2
y
2
diskriminantı pozitiftir. Böylece (1) ve (2)
denktir.
V nin time-like olduğunu farz edelim. Bu durumda V L space-liketır. Bu durumda
VL = x
L
∩ y
L
olduğundan P ve Q ayrık olduğunu elde ederiz. N = V ∩ H n bir hiperbolik doğrusudur
ve V ∩ x
L
, IR n+1 uzayının 1-boyutlu altuzayı olduğuna dikkat edelim. Ayrıca
(tx + y ), x
=0
denklemi
t= − x, y / x
2
tek çözümüne sahiptir. Üstelik,
2
tx + y = −
x, y
x
olur. Dolayısıyla V ∩ x
L
2
2
2
+ y <0
time-liketır. Böylece N ∩ P
u=
− x, y ( x x ) + x y
∓ ( x, y ) 2 − x
2
y
2
u pozitif time-like olarak seçilen artı ya da eksi işareti olan tekil noktasıdır. Aynı şekilde
N ∩ Q , V tekil bir noktasıdır. λ :IR → H n jeodezik doğrusu yani λ (0)=u ve λ (IR)=N
olsun. λ ′(0) ve x , u ∈ V ye ikisi de Lorentz ortagonal olduğunda λ ′(0) , x in bir skalar
katı olduğunu elde edilir. Böylece N , P ye Lorentz ortagonaldir. Aynı şekilde N, Q ya
ortagonaldir.
Diğer yandan (3) denkliğini sağladığını kabul edelim. N; P ve Q ya ortak Lorentz
ortagonal hiperbolik doğrusu olsun. Bu durumda N=W ∩ H n olan IR n +1 uzayının 2boyutlu bir W time-like altvektör uzayı vardır. N, P ye Lorentz ortagonalken x∈W
olduğunu elde ederiz. Aynı şekilde y∈W dır. Dolayısıyla V=W ve bu yüzden V timeliketır.
23
Uyarı: Teorem 1.2.16. nın ispatı, N ortak bir Lorentz ortagonal hiperbolik doğrusu ile
P ve Q, H n uzayının ayrık düzlemleri ise bu durumda N tektir; ayrıca x, y∈ IR n +1 P, Q
ya sırasıyla Lorentz ortagonal space-like vektörleri ise bu durumda x ve y , N nin tanjant
vektörleri olduğunu gösterir.
TANIM 1.2.16. (Space-like Vektörler Arasındaki Time-like Açı)
x, y∈ IR n+1 timelike altuzayını geren spacelike vektörler olsun.
Teorem 1.2.16. ile
x, y ≥ x y olduğunu biliyoruz. Dolayısıyla,
x, y = x y cosh θ ( x, y )
olan bir tek pozitif θ ( x, y ) reel sayısı vardır. x ve y arasındaki Lorentz time-like açısı,
θ ( x, y ) olarak tanımlanır. Aşağıdaki teoremde θ ( x, y ) nin geometrik yorumunu verilir.
TEOREM 1.2.17. x, y ∈ IR n +1 timelike altvektör uzayını geren spacelike vektörler
olsun. P, Q sırasıyla x, y ye Lorentz ortogonal H n uzayının hiperdüzlemleri olsun. Bu
durumda θ ( x, y ) , P ve Q ya Lorentz ortogonal N hiperbolik doğru boyunca P den Q ya
hiperbolik uzaklığıdır. Ayrıca x, y < 0 ⇔ x ve y, N nin tersi yönünde yönlendirilmiş
tanjant vektörleridir. [10]
ĐSPAT: P ∩ N noktası
u=
− x, y ( x x ) + x y
∓ ( x, y ) 2 − x
2
y
2
ve Q ∩ N noktası
v=
y x − x, y ( y y )
∓ ( x, y ) 2 − x
2
y
2
dır.
cosh d H (u , v) = - u, v
=
=
− (( x, y ) 3 x y + x, y )( x y )
∓ ( x, y ) 2 − x
− (( x, y )3 − x, y x
2
∓ ( x, y ) 2 − x
2
y
2
2
y ) (x y)
2
y
2
24
=
=
− x, y
∓ x y
x, y
∓ x y
= cosh θ ( x, y )
Ayrıca u, v nin hesaplaması, u ve v aynı işarete sahiptir ⇔
x, y < 0 olduğunu
gösterir. u ve v, x ve y ya da –x ve –y arasında V nin kuadrantıdır ⇔ u ve v nin - x, y
katsayısı pozitiftir. Böylece x ve y, N nin ters yönlü yönlendirilmiş tanjant vektörleridir
⇔
x, y < 0 dır.
x, y∈ IR n +1 spacelike vektörler olsun.P, Q sırasıyla x, y ye Lorentz ortogonal H n
uzayının düzlemleri olsun. Bu durumda P ve Q sonsuzda karşılaşır ⇔
x
L
∩ y
L
lightliketır. P ve Q sonsuzda karşılaşır ise P ve Q ayrıktır, fakat orijinde bakıldığında
bunlar
x
L
∩ y
L
nin 1-boyutlu lightlike altuzayının pozitif ideal son noktasında
karşılaştığı görülür.
TEOREM 1.2.18. x, y∈ IR n +1 lineer bağımsız spacelike vektörleri olsun. Bu durumda
aşağıdakiler denktir:
(1) x ve y vektörleri x, y = x y eşitliğini sağlar.
(2) V altvektör uzayı, x ve y lightlike tarafından gerilir.
(3) x ve y ye Lorentz ortogonal H n uzayının P ve Q hiperdüzlemleri sırasıyla
sonsuzda karşılaşırlar. [10]
TEOREM 1.2.20. x, y∈ IR n +1 lineer bağımsız spacelike vektör yani x, y lightlike
tarafından gerilen V altvektör uzayı olsun. Bu durumda
x, y < 0 ⇔ x, y ; V nin
1-boyutlu lightlike altuzayının ters tarafındadır.[10]
ĐSPAT: tx + y = 0 denklemi t = − x, y
x
2
tek çözüme sahip
2
2
t 2 x + 2 x, y t + y = 0
kuadrik denklemine denktir.
2
− x, y ( x x ) + y
25
lightlike vektörü, x ve y arasında V nin kuadrantıdır ⇔
x, y < 0 dır. Dolayısıyla, x ve
y, V nin 1-boyutlu lightlike altuzayının ters tarafındadır ⇔ x, y < 0 dır.
TEOREM 1.2.21. y, H n uzayının bir noktası ve P, H n uzayının bir hiperdüzlemi
olsun. Bu durumda P ye Lorentz ortogonal y boyunca geçen H n uzayının tek N
hiperbolik doğrusudur. [10]
ĐSPAT: x, P ye Lorentz ortogonal birim spacelike vektör olsun ve V, x ve y tarafından
gerilen altuzay olsun. Bu durumda N = V ∩ H n , y boyunca geçen bir hiperbolik
doğrusudur.
(tx + y ), x = 0
denklemi, t= − x, y çözümüdür. Dolayısıyla,
w=
− x, y x + y
∓ ( x, y ) 2 + 1
,
P ∩ N nin bir noktasıdır. λ : IR → H n , λ (IR)= N ve λ (0)=w olan bir jeodezik doğru
olsun. w ve x ortonormal vektörler iken
λ (t ) = (cosh t) w ∓ (sinh t) x
elde ederiz. Dolayısıyla λ ′(0) = ∓ x dir. Bu yüzden N, P ye Lorentz ortogonaldir.
N, P ye ortogonal ve y boyunca geçen bir hiperbolik doğru olduğunu kabul edelim.
λ : IR → H n , λ (IR)= N ve λ (0) ∈P olacak şekilde bir jeodezik doğru olsun. Bu
durumda λ ′(0) , P ye Lorentz ortogonaldir. Dolayısıyla
λ ′(0) = ∓ x olur. W,
N= W ∩ H n olan 2-boyutlu timelike altuzay olsun. x, y∈W iken W=V olarak elde
ederiz. Böylece N, tektir.
TANIM 1.2.16. IR n +1 uzayında x, spacelike vektör ve y bir pozitif timelike vektör
olsun. Bu durumda
x, y = x y sinh θ ( x, y )
olan bir tek θ ( x, y ) negatif olmayan reel sayı vardır. θ ( x, y ) açısına, x ve y arasındaki
Lorentz timelike açı denir. [10]
TEOREM 1.2.22. x, y ∈ IR n +1 , x bir spacelike vektör ve y bir pozitif timelike vektör
olsun. P, x e Lorentz ortogonal H n uzayının hiperdüzlemi olsun. Bu durumda θ ( x, y ) ,
26
y y boyunca geçen N hiperbolik doğrusu boyunca ölçülen y y den P ye hiperbolik
uzaklıktır. Ayrıca x, y < 0 ⇔ x ve y, P ile gerilen IR n +1 uzayının hiperdüzleminin ters
tarafındadır. [10]
ĐSPAT: v= y y olsun. P ∩ N noktası
u=
− x, y ( x x ) + x y
∓ ( x, y ) 2 − x
2
y
2
olduğundan
cosh d H (u , v) = - u, v
2
=
x, y − x
2
y
2
x y
= cosh θ ( x, y )
elde edilir. Ayrıca - u, v hesaplamasında u nun + işaretli olduğunu gösterir. u, x ve y
tarafından gerilen 2-boyutlu V timelike altuzayıdır. U, x ve y arasındaki V nin
kuadrantıdır ⇔ u nun - x, y katsayısı pozitiftir. Böylece x ve y, P tarafından gerilen
IR n +1 uzayının hiperdüzleminin ters tarafları üzerindedir ⇔
z2
ÖRNEK 1.2.1. K x 2 + y 2 = konisini alalım.
4
P1 (1,1,1) doğrultmanı orijinden geçen doğru
d1 :
x y z
= =
1 1 1
x, y < 0 dır.
27
→
olur. Bu da d1 doğrusunun doğrultmanı olan d1 (1,1,1) vektörü bir spacelike vektör
olarak alınır.
P2 (0,2,4) koni üzerinde bir nokta alıp,
y z
d 2 : x = 0,
=
2 4
→
alınarak d 2 (0,2,4) doğrultman vektörü bir lightlike vektör olur.
Diğer yandan P3 (0,0,1) noktası için koninin doğrultmanı olan e3 (0,0,1) vektör
doğrultmanı olacak şekilde
d 3 : {x = y = 0 , z = 1}
doğrusu ele alınırsa burada da (0,0,1) vektörü timelike vektör olur.
→
→
→
Şimdi S = (1,1,1) , T = (0,0,1) , L = (0,2,4) olmak üzere
a) S-T açısını bulalım;
(1,1,1), (0,0,1)
(1,1,1) (0,0,1)
1
= sinh θ ⇒
−1+1+1 1
= sinhθ
⇒ 1 = sinh θ
⇒θ = ln(1 + 2 )
olur.
b) Diğer yandan bir d doğrusu
x −5 y −5
=
= z
d :
4
3
→
verilsin. Doğrultmanı olan d (3,4,1) vektörü spacelike bir vektör olur. bu
→
vektörle, S arasındaki açıyı bulalım.
S-S için
(3,4,1), (1,1,1)
(3,4,1) (1,1,1)
= cos θ ⇒
⇒
− 3 + 4 +1
= cosθ
− 9 + 16 + 1 − 1 + 1 + 1
1
= cosθ
2
⇒θ = π
olur.
4
28
→
1
z
c) d : x = 4 y = doğrusunu ele alalım. Bu doğrunun doğrultmanı d (1, ,4)
4
4
→
vektörü olur. Bu bir timelike vektör belirtir. d ile T arasındaki açı ise;
1
(1, ,4), (0,0,1)
4
4
T-T için
= − cosh θ ⇒
= − cosh θ
1
1
(1, ,4) (0,0,1)
− 1 + + 16 1
4
16
⇒−
16
= cosh θ
241
⇒θ =
16 ± 15
241
olur.
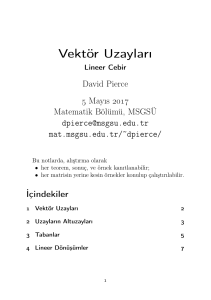
ÖRNEK 1.2.2.
ÖRNEK 1.2.3. Yukarıdaki şekilleri örneklerle ifade edelim.
y = − x 2 + 4 x + 16
y = ( x − 2) 4
y = x 2 − 4 x + 16
y = ( x − 2) 4
SSS
SST
29
y = 16
y = ( x − 2) 4
SSL
x ∈ [0,2] için y = ( x − 2) 4
x ∈ [2,4] için y = 8 x − 16
STL
x ∈ [0,4] için y = x 2 − 4 x + 16
y = −16
y = − ( x − 2) 4
TTL
y = 4 x 2 − 16 x − 16
y = − ( x − 2) 4
STT
y = −4 x 2 + 16 x − 16
y = − ( x − 2) 4
TTT
y = −4 x 2 + 16 x − 16
y = 8 x − 16
y = −8 x + 16
TLL
y = −16
y = 8 x − 16 LLL
y = −8 x + 16
1.3. E14 Minkowski 4-uzayında Yay Uzunluğu
Bu bölümde, öncelikle α
eğrisinin timelike,spacelike ve lightlike olması
durumlarını tanımlayacağız. Daha sonra, yay uzunluğu kavramını vereceğiz. Bu bize
Lorentz uzayı ile hiperbolik yay uzunluğu kıyaslaması imkanını sunar.
TANIM 1.3.1. α ∈ E14 Minkowski 4-uzayında bir eğri olsun. Böylece α eğrisinin hız
vektörü αɺ olmak üzere
i) αɺ , αɺ < 0 ise α timelike eğri
ii) αɺ , αɺ > 0 ise α spacelike eğri
iii) αɺ , αɺ =0 ise α null eğri
denir.
30
TANIM 1.3.2. (Hiperbolik Yay Uzunluğu)
Hiperbolik yay uzunluğu ile Lorentz uzunluğunu karşılaştıralım. Aynı olup
olmadığını görelim. Önce H n uzayının elemanlarına değinelim.
x, y∈ H n noktaları olsun.
2
2
x − y = x -2 x, y + y
2
≥ -2 – 2 x y
eşitliği elde ederiz ⇔ x = y dir. Dolayısıyla,
d L (x,y) = x − y
Lorentz uzaklık fonksiyonu, H n uzayındaki metrik için ilk üç aksiyomu sağlar. Fakat
üçgen eşitsizliğini sağlamaz; buna rağmen d L , H n uzayındaki eğrinin uzunluğunu
tanımlar.
γ : [a, b ] → H n eğrisi olsun ve P= {t 0 , t1 ,..., t m } , [a, b] aralığının bölümü olsun. γ
eğrisinin P tanımlı uzunluğu
m
ℓ L (γ , P ) = ∑ γ (ti ) − γ (ti −1 )
i =1
olarak tanımlanır. γ eğrisi Lorentz düzeltilebilirdir denir ⇔ Q ≤ P ise bu durumda
ℓ(γ ) − ℓ L (γ , Q) < ε
olan [a, b ] aralığının ∀ε > 0 için P parçasının ℓ(γ ) reel sayısı vardır.
ℓ(γ ) var ise tektir çünkü P ve Q, [a, b ] aralığının parçaları ise R ≤ P, Q olan [a, b ]
aralığının bir R parçası vardır.
γ , Lorentz rektefiyen yani sonsuz ise γ eğrisinin γ Lorentz uzunluğu ℓ(γ ) olarak
ifade edilir.[10]
TEOREM 1.3.1 γ : [a, b ] → H n bir eğri olsun. Bu durumda γ ∈ H n rektefiyendir ⇔
γ , Lorentz rektefiyendir ayrıca γ eğrisinin hiperbolik uzunluğu, γ eğrisinin Lorentz
uzunluğuyla aynıdır. [10]
ĐSPAT: x, y∈ H n olsun. Bu durumda
2
2
x − y = x -2 x, y + y
2
=2(cosh θ ( x, y ) -1)
olur. cosh θ ≥ 1+( θ
2
2
) olduğundan
31
x − y ≥ θ ( x, y )
şeklinde ifade edilir. γ eğrisinin Lorentz rektefiyen olduğunu kabul edelim. Q ≤ P ise
γ − ℓ L (γ , Q) < 1
olan [a, b ] aralığının bir P kısmı vardır. Dolayısıyla her Q ≤ P için
ℓ H (γ , Q) ≤ ℓ L (γ , Q) ≤ γ +1
elde edilir. Böylece γ rektefiyendir. Taylor teoremini kullanarak,
n2
n4
+
cosh θ
cosh θ ≤ 1+
2
24
elde edilir. Dolayısıyla cosh θ ≤ 12 ise
x − y ≤ θ (x,y) 1 + θ 2 ( x, y )
dir.
γ rektefiyen ve ε > 0 olsun. bu durumda
γ
H
− ℓ H (γ , P ) < ε
olan [a, b ] aralığının bir P kısmı vardır.
δ > 0 ve µ (γ , δ ) = sup{θ (γ ( s ), γ (t )) : s − t ≤ δ } kümesi olsun. γ , düzgün sürekli
olduğunda
µ (γ , δ ) ,
cosh µ (γ , δ ) ≤ 12 ve γ
δ
H
ile
sıfıra
gider.
1 + µ 2 (γ , δ ) < γ
H
Dolayısıyla
δ >0
olacak
şekilde
+ ε vardır.
P ≤ δ alalım. Bu durumda her Q ≤ P için
γ
H
− ε < ℓ H (γ , Q)
≤ ℓ L (γ , Q)
≤ ℓ H (γ , Q) 1 + µ 2
< γ
H
+ε
elde edilir. Dolayısıyla her Q ≤ P için
γ H − ℓ L (γ , Q) < ε
dir. Böylece γ , Lorentz rektefiyendir ve γ = γ
H
dir.
γ : [a, b ] → H n diferansiyellenebilir eğri olsun. γ (t ), γ (t ) = −1 iken γ (t ), γ ′(t ) = 0
olur. Dolayısıyla γ ′(t ) , ∀t için spacelike olduğu elde edilir.
32
TEOREM 1.3.2. γ : [a, b ] → H n bir C 1 eğrisi olsun. Bu durumda γ rektefiyendir ve
hiperbolik uzunluğu,
b
γ = ∫ γ ′(t ) dt
a
formülünü verir. [10]
ĐSPAT:
f: [a, b ] n +1→ IR
x
′
1
′
֏ f(x)= − γ 1 ( x1 ) + ... + γ n +1 ( xn +1 )
2
2
2
olarak tanımlansın. Bu durumda f süreklidir. [a, b ] n +1 kompakt olduğundan
{ f ( x) − f ( y) : x, y ∈[a, b] }
n +1
kümesi sınırlıdır. δ > 0 ve
µ ( f , δ ) = sup{ f ( x) − f ( y ) : xi − yi ≤ δ i = 1,2,..., n + 1 için}
kümesi olarak alalım. P= {t 0 , t1 ,..., t m } ,
P ≤ δ olacak şekilde
[a, b] aralığının
bir
parçasıdır. Ortalama değer teoremini kullanarak
γ i (t j ) − γ i (t j −1 ) = γ i′ ( sij )(t j − t j −1 )
olacak şekilde t j −1 ve t j
arasında bir sij
reel sayısı vardır. Bu durumda
s j = ( s1, j ,..., sn +1, j ) olan
γ i (t j ) − γ i (t j −1 ) = f ( s j )(t j − t j −1 )
elde edilir. Dolayısıyla,
γ i (t j ) − γ i (t j −1 ) − γ ′(t j ) γ i (t j ) − γ i (t j −1 )
= f ( s j ) − γ ′(t j ) (t j − t j −1 )
≤ µ ( f , δ )(t j − t j −1 )
olur.
m
s (γ , P ) = ∑ γ ′(t j ) (t j − t j −1 )
j =1
kümesidir. Bu durumda
33
ℓ L (γ , P ) − s (γ , P ) ≤
m
∑
γ i (t j ) − γ i (t j −1 ) − γ ′(t j ) γ i (t j ) − γ i (t j −1 )
j =1
≤ µ ( f , δ )(t j − t j −1 )
= µ ( f , δ )(b − a )
elde ederiz. Daha sonra ise
tj
b
m
a
j =1 t j −1
∫ γ ′(t ) dt − s(γ , P) = ∑ ∫ ( γ ′(t )
− γ ′(t j ) ) dt
tj
m
≤ ∑ ∫ ( γ ′(t ) − γ ′(t j ) ) dt
j =1 t j −1
m
≤∑
tj
∫ ( γ ′(t )
− γ ′(t j ) ) dt
j =1 t j −1
tj
m
≤ ∑ ∫ µ ( f , δ ) dt
j =1 t j −1
= µ ( f , δ )(b − a )
olur. Böylece
b
∫ γ ′(t ) dt − ℓ
b
L
(γ , P ) ≤
a
∫ γ ′(t ) dt − s(γ , P) + s(γ , P) − ℓ
L
(γ , P )
a
≤ 2 µ ( f , δ )(b − a )
olur. [a, b ]
n +1
kompakt olduğundan f :[a, b]
n +1
→ IR düzgün süreklidir. Bundan dolayı
µ ( f , δ ) , δ ile sıfıra gider. Dolayısıyla,
b
lim ℓ L (γ , P ) = ∫ γ ′(t ) dt
P →0
a
olur.
γ : [a, b ] → H n bir
eğri
dx = (− dx12 + ... + dxn2+1 )
ise
∫γ
1
2
olsun.
dir. Bu durumda
∫γ dx
dx = (dx1 + dx2 + ... + dxn +1 )
ve
= γ elde edilir. Ayrıca γ , C 1 eğrisi
b
dx =
∫ γ ′(t ) dt
a
elemanı denir.
dir. dx diferansiyeline, H n uzayının hiperbolik uzunluğunun
34
BÖLÜM 2
EĞRĐSEL YAPILAR
Bu bölümde Riemann üzerinde jeodezik eğrileri,uzunluk ve uzaklıklar arasındaki
ilişkileri belirteceğiz. Buradaki amacımız; bütün minimalize edilmiş eğrilerin jeodezik
olduğunu ve bütün jeodeziklerin en küçük lokalinde minimalize edilmiş uzunluğu
olduğunu göstermektir. M, g sabit Riemann metriğine sahip C ∞ n-manifoldunu alacağız.
Bütün kovaryant türevler ve jeodezikler, g nin Riemann konneksiyonuna göre
oluşturulur.
2.1. Riemann Manifoldları Üzerinde Uzunluklar ve Uzaklıklar
TANIM 2.1.1. γ :[a, b ]→ M eğri parçası ise γ eğrisinin uzunluğu
b
.
L( γ )= ∫ γ (t) dt
(2.1)
a
olarak tanımlanır. Bazı durumlarda L yerine Lg yazarak metrik üzerinde bağımlı olduğu
da belirtilebilir.
Bir eğrinin uzunluğunda parametrizasyon bağımsız olmalıdır. Bunun için
ϕ :[c, d ]→ [a, b] eğrisi C ∞ ve tersi de C ∞ olan γ~ = γ ϕ eğrisi olarak yeniden
parametrize edilir. [8]
LEMMA 2.1.1. Herhangi
γ :[a, b]→ M eğri parçası için γ nın yeniden parametrize
edilmesiyle L( γ ) = L ( γ~ ) olur. [8]
.
ĐSPAT: ∀ t ∈ I için γ : I → M eğrisi, C ∞ ve γ (t ) ≠ 0 olan regüler eğridir. Burada
.
γ (t ) tanjant vektörü, γ ∗ (d dt ) ve γ regüler eğrisi I aralığının M içine gömmesidir.
Jeodezikler, sabit hızlı olduğundan regülerdir.
35
γ : [a, b] → M
sürekli dönüşümü, i= 1,2,…,k için
γ
[ai −1 , ai ]
regüler eğrisi,
a = a0 < ... < ak = b şeklinde sonlu parçaları varsa bu eğriye parçalı regüler denir.
Riemann manifoldu üzerinde bütün uzaklıklar eğri parçaları boyunca ölçülür.
Admissible eğriyi değerlendirerek γ :{a} → M , γ (a ) =p sabit eğrisi belirlenir.
Admissible eğrinin her iki tarafından ai noktasına yaklaşırken iyi tanımlı, sıfır
olmayan ve bir taraftan hız vektörüne sahip olmalıdır. Fakat iki taraftan yaklaşılan hız
vektörlerinin eşit olması gerekir.
γɺ (ai − ) = lim γɺ (t ) ;
t →ai
γɺ (ai + ) = lim γɺ (t )
t → ai
şeklinde ifade edilir.
γ : [a, b] → M admissible eğrisi ve a = a0 < ... < ak = b gibi alt parçaları olsun. γ
eğrisinin uzunluğu γ
tanımlanır.
altaralığı
[ai −1 , ai ]
[c, d ] aralığının
C∞
kısıtlanan
, C ∞ altparçalarının uzunluklarının toplamı şeklinde
c = ci < ... < ck = d altbölümü için C ∞ tersi olan ∀[ci −1 , ci ]
ϕ :[c, d ]→ [a, b] homeomorfizmini admissible eğrisini
γ : [a, b] → M eğrisine parametrize ederek genişletebileceğinden eğri uzunluğunu
parametrizasyondan bağımsız olduğunu gösterir.
TANIM 2.1.2. γ : [a, b] → M admissible eğrisinin yay uzunluk fonksiyonu
s: [a, b] → IR
t
t
֏ s(t)= L(γ
[α , t ] ) =
∫ γɺ(u ) du
(2.2)
a
şeklinde tanımlanır. s, ∀γ eğrisinin C ∞ olduğu durumda C ∞ dur. sɺ(t ) , γ eğrisinin
γɺ (t ) hızına eşittir. [8]
Eğriler arasında birim hızlı olması kolaylık sağlar. Aşağıdaki gibi her admissible eğri
bir parametrizasyona sahiptir.
36
Örnek 2.1. γ : [a, b] → M bir admissible eğri ve l= L( γ ) kümesi olsun.
a) γ~ birim hızlı olacak şekilde γ eğrisinin γ~ : [0, l ] → M tek bir parametrizasyonu
olduğunu gösteriniz.
γ~ birim hızlı olsun. h( s ) = t , γ~ = γ h ve γ = γ (t ) olarak tanımlansın. Bu
durumda
dγ~ dγ dh dγ dt γ ′(t )
=
⋅
=
⋅ =
ds
ds dh ds dt ds
dt
elde edilir. γ ′( s ) = 1 olduğundan
γ ′( s ) =
γ ′( s )
ds
dt
= 1 ⇒ γ ′( s ) =
ds
dt
⇒ s = ∫ γ ′( s ) dt
olur.
b) γ~ , [0, l ] formunun parametre aralığı olan herhangi birim hızlı eğri ise, γ
eğrisinin yay uzunluk fonksiyonu h(s)=s olduğunu gösteriniz.
ds
= 1 olduğu için
dt
s = t aldığımızda h( s ) = t dönüşümü h( s ) = s halini alır.
Bu sebepten dolayı bu eğriye, yay uzunluğuyla parametrize edilen eğri denir.
γ : [a, b] → M herhangi bir admissible eğri ve f ∈C ∞ [a, b ] olsun.
∫γ
şeklinde
b
fds = ∫ f (t ) γɺ (t ) dt
a
∫γ fds ile belirtilen yay uzunluğuna göre
f nin integralini tanımlarız.
Örnek 2.2. γ : [a, b] → M bir admissible eğri ve f ∈C ∞ [a, b ] olsun.
∫γ fds , parametrizasyonun bağımsızlığını gösteriniz.
∫γ
b
fds = ∫ f (t ) γɺ (t ) dt
a
(2.3)
37
olarak
yay
uzunluğuna
göre
ifade
edilmişti.
Eğrinin
yay
uzunluğunun
parametrizasyondan bağımsız olduğu Lemma 2.1.1 in ispatında gösterildi. Böylece
∫γ fds
parametrizasyondan bağımsız olduğu ifade edilmiştir.
V, [a~i −1 , a~i ] her bir alt aralık üzerinde C ∞ olan a= a~0 < a~1 <…< a~m =b sonlu altbölümü
var ise, V : [a, b ] → TM sürekli dönüşümüne, yani bütün t’ ler için Vt ∈ Tγ ( t ) M ye, γ
boyunca kısmi C ∞ vektör alanı denir. Verilen herhangi bir Vα ∈ Tγ (α ) M vektörü için
Vα , γ boyunca tek bir kısmi C ∞ paralel dönüşümüne sahip; γ ( a1 ) birinci parçası
boyunca Vα paralel dönüşümü C ∞ , ikinci parçası boyunca Vα paralel dönüşümü C ∞ ve
bu şekilde devam edildiğinde her γ durumu için paralel dönüşüm C ∞ dur.
TANIM 2.1.3: (Uzaklık)
M nin bir bağlantılı Riemann manifoldu olduğunu farzedelim. Herhangi bir p,q∈M
nokta çifti için , p den q ya bütün elde edilebilir eğrilerin uzunluğunun infimumu olarak
d(p,q) Riemann uzaklığını tanımlıyoruz.Kontrol etmek için iyi tanımlı, herhangi iki
noktasının admissible eğrisi tarafından bağlantılı olduğunu göstermeye ihtiyacımız
vardır.
Bağlantılı manifold, yol bağlantılı olduğundan c:
[a, b] → M
sürekli yoluyla
bağlantılıdır. Kompaktlığıyla her i için c[ai −1 , ai ] ne tek bir haritasında içerilen [a, b ]
nin sonlu altbölümü vardır. Daha sonra aynı noktalar arasında bir γ kabul edilebilir
eğrisini açığa vuran koordinatlardaki C ∞ yoluyla böyle her parçayı yer değiştirebiliriz.
Bu nedenle ∀p, q ∈ M için d(p,q) sonludur.
LEMMA 2.1.3. Yukarıda tanımlanan d uzaklık fonsiyonuyla , herhangi bağlantılı
Riemann manifoldu, verilen manifold topolojisiyle aynı belirlenen topolojisi olan
metrik uzaydır.[8]
ĐSPAT : d(p,q) = d(q,p) ≥ 0 ve d(p,p)=0 olarak tanımdan açıktır. Üçgen eşitsizliği ise,
uzunluğu verilen iki eğrinin p den r ye uzunlukları toplamı, p den q ya ve q dan r ye
admissible eğrilerinin birleşmesinin doğruluğundan elde edilir. p ≠ q
olduğunda
d(p,q)>0 olduğunu gösterir ve metrik topolojisi, manifoldun topolojisiyle aynı olduğunu
gösterir. Bu yüzden lokal koordinatlardaki Riemann uzaklığını Öklid uzaklığıyla
karşılaştırmamız gerekir. p ∈ M ve
( x i ) , p merkezli normal koordinatları olsun.
38
Düzgün normal komşuluk lemmasının ispatındaki (Lemma 3.3.2.) gibi ∀V ∈ Tx M ve
x∈ y durumunda c V
q
≤ V q ≤ CV
q
olan c ve C pozitif sabitleri ve p etrafında ε
yarıçapının y kapalı jeodezik yuvarı vardır.
cL q ( γ ) ≤ L q ( γ ) ≤ CL q ( γ )
(2.1)
görüntüsü , y de içerilen herhangi γ admissible eğrisi için uzunluğun tanımından gelir.
Şimdi q ≠ p ise , q ∉ y olacak şekilde ε ye küçültebiliriz. Daha sonra p den q ya
herhangi γ : [a, b ] → M admissible eğrisi, ∂y jeodezik küresi boyunca geçer. (Kürenin
tümleyeni bağlantısız olduğundan ve p, q farklı bileşenlerde uzanır.)
Đlk zamanı t0 ile belirtmiş olursak ,
d(p,q) ≥ Lq (γ ) ≥ Lq (γ
) ≥ cd q ( p, γ (t0 )) = cε > 0
(2.2)
Son olarak, iki topolojiyi karşılaştırmak için yukarıdaki gibi
y formunun açık
[a , t 0 ]
) ≥ cLq (γ
[a , t 0 ]
gelir. Böylece d bir metriktir.
kümesinde küçük Öklid yuvarından manifold topoloji için baz inşa edebiliriz ve
topolojisi için küçük metrik yuvarı tarafından üretildiği önemlidir. Böyle herhangi y
kümesi için, Öklid uzaklık ve Riemann uzaklığı denktir ve bu yüzden iki topolojideki
açık baz kümeleri, ikisinde de açıktır. Bu, iki topolojinin aynı olduğunu gösterir.
2.2. Jeodezikler
Riemann manifoldundaki γ admissible eğriye, aynı son noktaya sahip herhangi
diğer γ admissible eğri için L( γ ) ≥ L( γ ) ise , minimalize olarak adlandırılır. γ
minimalize olan uzaklığın tanımından gelir ⇔ L( γ ) son noktaları arasındaki uzaklığa
eşittir.
Bütün minimalize eğrilerin jeodezikler olduğunu göstermek için M deki admissible
eğrilerin kümesi üzerinde fonksiyonel şeklinde L uzunluk fonksiyonu düşünebiliriz.
(Tanım kümesi, fonksiyonların kümeleri olan fonksiyonlara genellikle fonksiyonel
denir.) Görüşün bu noktasından minimalize eğriler için araştırma , bu fonksiyonelin
minimali için araştırılması şeklinde düşünülür.
Calculustan , minimalize olarak bir γ eğrisi için gerekli şart bazı durumlarda L nin
türevinin γ da sıfır olmasıdır. Bu, Calculus varyasyonları şeklinde bilinen konuyu
getirmektedir. Bunlar Calculusun kullanımı özdeşlemek ve fonksiyonellerin uç
noktalarını analiz etmek için fonksiyon ya da dönüşümlerin uzayları üzerinde tanımlıdır.
39
Tamamen gelişen durumundaki, Calculus varyasyonu türev, gradyent, kritik noktalar,
lokal uç noktaları, eyer noktası ve Hessian gibi fonksiyon uzaylarının sonsuz boyutlu
grubu çok değişkenli Calculusun genellikle bütün araçlarının birini uygulamayı sağlar.
Oysa amacımız için sonsuz boyutta grubunda Calculus teoresini formalize etmeye
ihtiyaç yoktur. γ minimalize eğri ve Γs ; L(Γs ) , Γ0 = γ ve s nin farklı fonksiyonları olan
aynı bitiş noktalı admissible eğrilerin ailesi Γs ise , daha sonra temel Calculus dan
L( Γs ) s=0 da s-türevine sahip değildir çünkü orada minimum elde edilir.
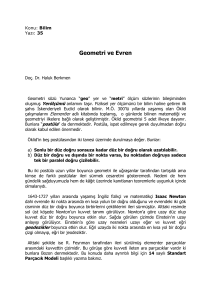
2.2.1.Admissible Aileler
Daha ayrıntılı bir şekilde incelenirse daha fazla tanımlardan yararlanmak gerekir.
Eğrilerin admissible eğrisi , ∀ s∈(- ε , ε ) için Γs (t ) = Γ( s, t ) bir admissible eğrisinden
ve a= a0 <…< ak =b bazı sonlu altbölümleri için (−ε , ε ) × [ai −1 , ai ] formunun her
dikdörtgeni üzerinde C ∞ olan
Γ : (−ε , ε ) × [a, b ] → M sürekli dönüşümüdür. Γ , bir
admissible aile ise; Γ boyunca vektör alanı, ∀( s, t ) için V(s, t) ∈ TΓ ( s , t ) ve V
( − ε ,ε ) + [aˆ i −1 , aˆ i ]
,
a= aˆ0 < ... < aˆ m = b bazı altbölümleri için C ∞ olan V : (−ε , ε ) × [a, b] → TM sürekli bir
dönüşümdür.
Şekil 2.1. Admissible aileler
Γ admissible ailesi, eğrinin iki konneksiyonunu tanımlar. Bunlar; Γs (t ) = Γ( s, t ) ana
eğrileri , s=sabit düzenlenerek [a, b ] üzerinde tanımlanır ve Γ (t ) (s)= Γ (s,t) transvers
eğrileri t=sabit düzenlenerek (−ε , ε ) üzerinde tanımlanır. Transvers eğrileri, ana eğriler
genelde sadece parçalı regülerken ∀ t için (−ε , ε ) üzerinde C ∞ dur. Her Γ , C ∞
durumunda, eğrilerin bu iki ailesine teğet vektörler , Γ boyunca vektör alanlarının
örnekleridir; onları
∂ t Γ ( s, t ) =
şeklinde belirtiriz.
d
d
Γs (t ); ∂ s Γ( s, t ) = Γ (t ) ( s )
dt
ds
(2.3)
40
Aslında, ∂ s Γ , (−ε , ε ) × [a, b ] bütün dikdörtgensel üzerinde her zaman süreklidir. Bir
taraftan, (−ε , ε )
×
{ai } doğru parçası boyunca değeri sadece bu parça üzerindeki
Γ nin
değerine bağlıdır, çünkü türevi sadece s değişkenine göre alınır. Diğer bir taraftan her
(−ε , ε ) × [ai −1 , ai ] ve (−ε , ε ) × [ai , ai +1 ] altdikdörtgensel üzerinde süreklidir (aslında
C ∞ ), bu yüzden t= ai deki sağ tarafın ve sol tarafın limitleri eşit olmalıdır. Bu nedenle
∂ s Γ , her zaman Γ boyunca bir vektör alanıdır. (Oysa ∂ t Γ genellikle t= ai de sürekli
değildir.)
V, Γ boyunca bir vektör alanı ise , formların C ∞ olduğu en küçük olduğu yer olan
transvers eğrileri boyunca ya da ana eğriler boyunca V nin kovaryant türevlerini
hesaplayabiliriz ; T boyunca sonuçlanan vektör alanları sırasıyla DsV ve DtV şeklinde
belirtilir.
Minimalize eğrilerin ispatındaki önemli noktası; Riemann konneksiyonunun
simetrisi olan jeodezik olmasıdır. Aşağıdaki Lemma ispatlarımızda yararlanılır.
LEMMA 2.2.1.1. (Simetri Lemma)
Riemann manifoldundaki Γ : (−ε , ε ) × [a, b] → M , eğrilerin kabul edilebilir ailesi
olsun.
Γ ,C∞
olduğu
herhangi
bir
(−ε , ε ) × [ai −1 , ai ]
dikdörtgen
üzerinde,
Ds ∂ t Γ = Dt ∂ s Γ olur. [8]
ĐSPAT: Bu lokal bir soru olduğundan herhangi bir Γ( s0 , t0 ) noktası etrafında ( x i )
koordinatlarında hesaplama yapabiliriz. Γ (s,t)= ( x1 ( s, t ),..., x n ( s, t )) şeklinde Γ nin
bileşenlerini yazarsak ;
∂tΓ =
∂x k
∂x k
∂ k ; ∂ sΓ =
∂k
∂t
∂s
(2.4)
elde ederiz. Daha sonra eğri boyunca kovaryant türevleri için koordinat formülünü
kullanarak,
∂ 2 x k ∂x i ∂x j k
Ds ∂ t Γ =
+
Γ ji ∂ k ;
∂s∂t ∂t ∂s
∂ 2 x k ∂x i ∂x j k
+
Γji ∂ k
Dt ∂ s Γ =
t
s
s
t
∂
∂
∂
∂
(2.5)
olur. Yukarıdaki ikinci doğrudaki i ve j nin rolünü ters çevirmeye ve Γjik = Γijk simetri
şartını kullanarak bu iki ifadenin eşit olduğunu görürüz.
41
γ : [a, b] admissible eğri ise, γ varyasyonu, bütün t∈ [a, b] için Γ0 (t ) = γ (t ) olacak
şekilde Γ admissible ailesidir. Buna, ∀ s için Γs (a ) = γ (a ) ve Γs (b ) = γ (b ) bağıntısı ise
uygun varyasyon veya sabit bitiş noktalı varyasyon denir. Γ , γ nın bir varyasyonu ise,
Γ nin varyasyon alanı, γ boyunca V(t)= ∂ s Γ (0,t) vektör alanıdır. V (a ) = V (b ) = 0 ise γ
boyunca V vektör alanı uygundur. Uygun varyasyonun varyasyon alanı, kendisine
uygun olduğu kesindir.
LEMMA 2.2.1.2. γ , bir admissible eğri ve V, γ boyunca bir vektör alanı ise V, γ nın
bazı varyasyonlarının varyasyon alanıdır. V, uygun ise, varyasyon zaten uygun olarak
alınır. [8]
ĐSPAT : Γ (s,t)=exp(sV(t)) kuralım. [a, b] nin kompaktlığından Γ nin, (−ε , ε ) × [a, b ]
üzerinde tanımlı olan bazı ε > 0 vardır. V1 tanım kümesinin tamamı üzerinde sürekli ve
C ∞ olduğu her [ai −1 , ai ] altaralığı için (−ε , ε ) × [ai −1 , ai ] üzerinde Γ , C ∞ dur. Üstel
dönüşümün özelliklerinden Γ nin varyasyon alanı, V dir. Dahası, V (a ) = V (b ) = 0 ise,
Γ (s,a) ≡ γ (a) ve Γ (s,b) ≡ γ (b) olduğu açıktır bu yüzden Γ uygundur.
2.2.2. Minimalize Eğriler
Uygun varyasyon boyunca uzunluk fonksiyonun türevi için ifadeyi hesaplayabiliriz.
Geleneksel olarak dönüşümün uzay üzerinde fonksiyonelinin türevine birinci varyasyon
denir.
LEMMA 2.2.2.1 (Birinci Varyasyon Lemma)
γ : [a, b] → M
herhangi birim hızlı admissible eğri, Γ ; γ
eğrisinin uygun
( ) ( )
+
−
varyasyonu ve V; onun varyasyon alanı olsun. Daha sonra ∆ iγɺ = γɺ ai − γɺ ai ,
ai noktasında γɺ tanjant vektör alanında sıçrama ve
d
ds
olur. [8]
k −1
L(rs ) = − ∫ < V , Dtγɺ > dt − ∑ < V (ai ), ∆ iγɺ >
s =0
b
a
i =1
(2.6)
42
ĐSPAT: Kısalık için
T (s, t ) = ∂ t Γ(s, t ) , S (s, t ) = ∂ s Γ(s, t )
(2.7)
olarak belirtelim. Γ ’nin C ∞ olduğu [ai −1 , ai ] altaralığında L(Γs ) deki integrandı C ∞ ve
integrasyonun tanım kümesi kompakt olduğundan, en son doğrudaki simetri lemmasını
kullandığımızda
ai ∂
d
L(Γs ) [ai −1,ai ] = ∫
T ,T
a i −1 ∂
ds
s
=∫
ai
=∫
ai
ai −1
a i −1
1
T ,T
2
1/ 2
dt
−1 / 2
2 DsT , T dt
1
Dt S , T dt
T
(2.9)
elde etmek için integral işareti altında diferansiyelleyebiliriz. s=0 aldığımızda
S(0,t)=V(t)
T(0,t)= γɺ (t)
ve
S ( 0, t ) = V ( 0, t ) = γɺ ( t )
(uzunluğu
1)
olarak
notasyonladığımızda
(
)
ai
d
L Γs [a a ] = ∫ DtV , γɺ dt
ai −1
i −1, i
ds s=0
ai d
= ∫ V , γɺ − V , Dtγɺ dt
a i −1 dt
( ) − V (a
= V (ai ), γɺ ai
−
i −1
), γɺ (ai+−1 )
ai
−
∫ V , D γɺ dt
t
a i −1
(2.10)
olur. Son olarak i leri baştan sona topladığımızda V( a0 )=V( ak )= 0 notasyonudur.
Çünkü Γ , uygun varyasyondur. Bu durumda
k −1
b
d
L(Γs ) = − ∫ V , Dtγɺ dt − ∑ V (ai ), ∆ iγɺ
a
ds s = 0
i =1
elde ederiz.
(2.11)
43
Çünkü herhangi bir admissible eğrinin, birim hızlı parametrizasyona sahiptir ve
uzunluğu, parametrizasyondan bağımsızdır. γ , yukarıdaki önermedeki gereken gerçek
kısıtlama değildir, fakat hesaplamaya yakın çıkar.
Örnek 2.2.1 : γ bir C ∞ , birim hızlı eğri olsun.
a) Bütün t için Dt γɺ , γɺ ile ortogonal olduğunu gösteriniz.
γ birim hızlı eğri olduğundan
γɺ, γɺ = ±1
olur. Bu durumda
γɺ, γɺ = ±1
d
γɺ, γɺ = 0 ⇒ Dt γɺ, γɺ + γɺ, Dt γɺ = 0
dt
⇒ Dt γɺ, γɺ = 0 (simetrikten)
Böylece Dt γɺ, γɺ ortogonaldir.
b) Γ , bütün s ler için Γ nin γ yeni parametrizasyonu olan γ nın uygun
varyasyonu ise L(Γs ) nin birinci varyasyonunun sıfır olduğunu gösteriniz.
?
d
(L(rs )) = 0 göstermeliyiz.
ds
( ) ( ) alınarak
+
∆ iγɺ = γɺ ai − γɺ ai
d
ds
−
k −1
L(Γs ) = − ∫ V , Dt γɺ dt − ∑ V (ai ), ∆ i γɺ
b
s =0
a
i =1
olduğu gösterilmişti. Admissible eğri olduğundan V ∈ T ve böylece V ≈ γɺ
olur. Böylece ortogonallikten
b
− ∫ V , Dtγɺ dt = 0
a
elde edilir. γɺ var olduğundan γɺ = γ + = γ − ifade edilir. Bunu denklemde
yerine koyarsak
k −1
∑ V (a ), ∆ γɺ
i
i
=0
i =1
elde etmiş oluruz. Dolayısıyla
d
(L(rs )) = 0
ds
olur.
44
TEOREM 2.2.2.1. Her minimalize eğri, birim hızlı parametrizasyon şeklinde ifade
edildiğinde, jeodeziktir. [8]
γ : [a, b] → M
ĐSPAT:
minimalize
ve
birim
hızlı
olduğunu
farzedelim
ve
a = a0 <…< ak =b, γ nın [ai −1 , ai ] üzerinde C ∞ olacak şekilde alt bölümü olsun. Γ , γ
nın herhangi uygun varyasyonu ise
s=0
olduğunda dL(Γs ) = 0 olduğu temel
calculustan sonuçlanır. γ boyunca her uygun vektör alanı, bazı uygun varyasyonun,
varyasyon alanı olduğundan,
k −1
b
d
L(Γs ) = − ∫ V , Dt γɺ dt − ∑ V (ai ), ∆ iγɺ ; ∆ iγɺ = γɺ ai+ − γɺ ai−
a
ds s =0
Đ =1
( ) ( )
(2.12)
sağ tarafı böyle her V alanı için sıfır olmalıdır.
Đlk basamak, her [ai −1 , ai ] altaralığı üzerinde Dt γɺ =0 olduğunu göstermektir, bu
yüzden γ , kırık jeodeziktir. Böyle bir aralık seçelim ve ϕ ∈ C ∞ (R ) , ϕ >0 ve [ai −1 , ai ]
üzerinde ve ϕ =0 her aralıkta olacak şekilde bump (atlayan) fonksiyon olsun. Daha
sonra V= ϕ Dt γɺ ile
ai
0 = − ∫ ϕ Dt γɺ dt
2
(2.13)
a i −1
olur. Integrand negatif olmadığından her böyle alt aralık üzerinde Dt γɺ =0 olduğunu
gösterir.
Sonra,
γ
eğrisinin köşelere sahip olmadığını söyleyen
∆ iγɺ =0 olduğunu
göstermemiz gerekir. Herhangi 0<i<k için, V( ai )= ∆ iγɺ ve V( a j )=0 j ≠ i için olacak
şekilde γ boyunca bir V vektör alanı yapılandırmaya koordinat haritasındaki bump
2
fonksiyonunu kullanmak kolaydır. Daha sonra ifade, − ∆ iγɺ =0 olarak kalır.
Son olarak γ nın birer taraflı iki hız vektörleri her γ de eşleştiğinden γ
γ [a
i −1 , a i
]
[ai , ai +1 ]
eğrisi,
eğrisinin jeodeziğinin devamı olduğu jeodeziğin tekliğinden ve bu nedenle γ
nın C ∞ olduğu gelir.
45
Şekil 2.2. ivme vektörünün
γ
Şekil 2.3. Köşenin yuvarlanması
deforme edilmesi
Önceki ispat aydınlatıcı geometrik gösterime sahiptir. V= ϕ Dt γɺ
ile birinci
varyasyon, ivme vektörlü doğrultudaki γ deforme uzunluğunun gösterimi negatiftir.
(Şekil 2.2) Benzer şekilde, γ kırık jeodeziğinin uzunluğu, V( ai )= ∆ iγɺ olacak şekilde V
vektör alanının doğrultusundaki deformesi tarafından azalır. (Şekil 2.3) Birinci
varyasyon formülü, gerçekte Teorem 2.2.2.1 daki iddia edilenden daha fazla şey söyler.
Đspatlamadaki γ jeodeziği, minimalize eğrinin kabulünü genişleterek kullanılır. Sadece
s = 0 da s ye göre L(Γs ) nin türevinin sıfır, γ nin herhangi Γ uygun varyasyonu için
L nin kritik noktası olması gerçeğini kullanırız. Bu nedenle aşağıdaki durumda Teorem
2.2.2.1 yı genişletebiliriz.
SONUÇ 2.2.2.1: γ birim hızlı admissible eğrisi, L için bir kritik noktadır ⇔ γ ,
jeodeziktir. [8]
ĐSPAT : γ bir kritik nokta ise, Teorem 2.2.2.1 nın ispatını, γ jeodezik olduğunu
göstermeye modifiye olmadan oluşturur. Tersi ile γ jeodezik ise daha sonra ikinci
varyasyon formülünde ilk terimi, jeodezik denklemiyle sıfır olur ve ikinci terimi yok
olur çünkü γɺ sıçramaya sahip değildir.
Böylece, Dtγɺ =0
jeodezik denklemi, uzunluk fonksiyonelinin kritik noktalarını
karakterize eder. Genelde, dönüşümün uzay üzerinde bir fonksiyonelinin kritik
noktalarını karakterize eden denkleme, fonksiyonelin varyasyon denklemi veya EulerLagrange denklemi denir.
Diferansiyel geometrisindeki bir çok farklı denklem, varyasyonal denklemlerle
başlar. Einstein denklemi, Yamabe denklemi ve minimal yüzey denklemi bu tip
denklemlerdir.
46
2.2.3. Lokal Minimalize Eğriler
Teorem 2.2.2.1 i tersine dönüştürürüz ve jeodeziklerin lokal minimalize olduğunu
gösteririz. Đspat, aşağıdaki basit geometrik gerçeği temel alır.
Şekil 2.4. Gauss Lemmanın ispatı
TEOREM 2.2.3.1. (Gauss Lemma)
U, p∈M merkezli jeodezik yuvar olsun.
∂
birim radyal vektör alanı, U daki
∂r
jeodezik kürelerine g-ortoganaldir.[8]
ĐSPAT: q∈ U ve x∈ Tq M, q boyunca jeodezik küresine teğet vektör olsun. Çünkü
exp p , U üzerinde diffeomorfizmdir, q= exp p V olacak şekilde V∈ Tp M vektörü vardır.
Ayrıca x = (exp p )∗ w olacak şekilde ω ∈ Tv (Tp M ) = Tp M vektörü vardır (Şekil 2.4).
Daha sonra R = d ( p, q ) olan V ∈ ∂BR ( a ) ve V ∈ TV ∂BR ( 0 ) olur. p den q ya radyal
jeodezik, γɺ ( t ) = R∂ / ∂r ile γ ( t ) = exp p ( tV ) dir. Böylece g ye göre x ⊥ γɺ (1) olduğunu
göstermeye ihtiyacımız vardır.
σ ( 0 ) = V ve σɺ ( 0 ) = ω olacak şekilde ∂BR ( 0 ) da
uzayan σ : ( −ε , ε ) → Tp M eğrisini seçelim ve
Γ ( s, t ) = exp p ( tσ ( s ) )
(2.14)
şeklinde verilen γ nın Γ varyasyonunu değerlendirelim. ∀s ∈ ( −ε , ε ) için σ ( s ) , R
uzunluğunun bir vektörüdür, bu yüzden Γs , R sabit hızlı jeodeziktir.
47
S (0,0) =
d
exp p (0) = 0;
ds s = 0
T (0,0) =
d
exp p (tV ) = V ;
dt t = 0
S (0,1) =
d
exp p (σ ( s )) = (exp p )*σ (0)
ds s=0
= X;
T (0,1) =
d
exp p (tV ) = γɺ (1)
dt t =1
olduğu tanımından gelir. Bu nedenle
( s, t ) = ( 0, 0 )
ve
(2.15)
( s, t ) = ( 0,1)
olduğundan
x, γɺ (1) ye eşit olduğunda S , T = 0 dır, bu yüzden teoremin ispatı için S , T
nin t
nin bağımsızlığını göstermek için yeterlidir.
∂
S , T = Dt S1T + S1 DtT
∂t
= DsT1T + σ =
1 ∂ 2
T =0
2 ∂s
(2.16)
(1) Dt S = DsT simetri lemması, (2) her Γ s jeodezik olduğundan DtT ≡ 0 olduğu
gerçeği ve (3) bütün (s, t ) için T = Γɺ s ≡ R olduğu gerçeğini kullanarak hesaplarız. Bu,
teoremi ispatlar.
Sonraki sonucun formunda öncelikle Gauss Lemma’yı kullanırız.
SONUÇ 2.2.3.1. :
(x ) ,
i
p ∈ M merkezli bir U jeodezik yuvarı üzerinde normal
koordinatlar olsun, ve r radyal uzaklık fonksiyonu olsun. Daha sonra U − { p} üzerinde
gradr =
∂
olur. [8]
∂r
ĐSPAT : Herhangi g ∈ U − { p} ve Y ∈Tq M için
dr (Y ) =
∂
,Y
∂r
(2.17)
48
olduğunu göstermek gerekir.
q boyunca exp p ( ∂BR ( 0 ) ) jeodezik küresi, r = R denklemiyle normal koordinatında
karakterize edilir.
∂
, bu küreye transvers olduğundan bazı küreye teğet X vektörü ve
∂r
bazı α sabiti için α ∂
∂r
+ X şeklinde Y yi birleştirebiliriz. X, r nin seviye kümesine
( ∂r ) = 1
teğet olduğundan dr ( X ) = 0 ve koordinattaki doğrudan hesaplamalarıyla dr ∂
olarak elde edilir. Bu nedenle (2.17) ün sol tarafı
dr α
∂
∂
+ X = α dr + dr ( X ) = α
∂r
∂r
(2.18)
olur.
Diğer bir yandan, Teorem 3.3.1.(e) ile, ∂
∂r
birim vektördür. Bu nedenle (2.17)
denkleminin sağ tarafı,
2
∂
∂
∂
∂
,α
+ X =α
+
,X =α
∂r ∂r
∂r
∂r
ve X, ∂
∂r
(2.19)
ye ortogonal olarak sonuçlandırmak için Gauss Lemması kullanılır.
TEOREM 2.2.3.2. p ∈ M ve q, p etrafında jeodezik yuvarında içerildiğini farzedelim.
Daha sonra p den q ye radyal jeodezik, M deki p den q ya tek minimalize eğrisidir. [8]
ĐSPAT: exp p ( Bε ( 0 ) ) ; q yu içeren jeodezik yuvar olacak şekilde ε > 0 seçelim.
γ : [ 0, R ] → M yay uzunluğuyla parametrize edilen p den q ya radyal jeodezik olsun ve
bazı V ∈ Tp M birim vektörü için γ ( t ) = exp p ( tV ) yazalım. Daha sonra γ , birim hıza
sahip olduğundan L ( γ ) = R dir, bu yüzden p den q ya herhangi diğer kabul edilebilir
eğri R den daha büyük uzunluğa sahiptir. S R = exp p ( ∂BR ( 0 ) ) , R yarıçapının jeodezik
küresini belirtsin.
49
Şekil 2.5 radyal jeodeziklerin
minimalize olma durumu
σ : [ 0, b ] → M aynı zamanda yay uzunluğuyla parametre edilebilen bir eğri olsun.
Đncelemeye L (σ ) ≥ L ( γ ) göstermeyle başlarız.
a0 ∈ [ a, b ] , σ ( t ) ∈ S R olan a0 sonrası birinci zaman b0 ∈ [ a, b ] ve α ( t ) = p olan son
zamanı belirtsin (Şekil 2.5). Herhangi bir t ∈ [a 0 ,b0 ] için X ( t ) , σ ( t ) boyunca jeodezik
küreye teğet olan
σɺ ( t ) = a ( t )
∂
+ X (t )
∂r
(2.20)
şeklinde σɺ ( t ) bileşenlerine ayırabiliriz. Gauss lemmadan bu, ortogonal bir ayrışımdır,
bu yüzden
σɺ ( t ) = α ( t ) + X ( t ) ≥ α ( t )
2
2
2
2
olur. Dahası, Sonuç 2.2.3.1. den
α ( t ) = ∂ ∂r , σɺ ( t ) = dr (αɺ ( t ) ) olur. Bu nedenle
(
L (σ ) ≥ L σ
[ a0 ,b0 ]
= Lim ∫
b0
= Lim ∫
b0
= Lim ∫
b0
δ →0
δ →0
δ →0
a0 +δ
a0 +δ
a0 +δ
)
σɺ ( t ) dt
(σɺ ( t ) ) dt
d
r (σ ( t ) ) dt
dt
= r (σ ( b0 ) ) − r (σ ( a0 ) )
= R = L (γ )
(2.21)
50
elde edilir. Bu yüzden γ minimalizedir.
L (σ ) = R olduğunu farzedelim. Bu durumda (2.21) deki eşitsizliklerde eşitlik
sağlanır. Çünkü σ , birim hızlı eğri kabul etmiştik, ilk eşitlik a0 = 0 ve b0 = b = R
olduğunu gösterir çünkü diğer bir deyişle −l = a0 öncesi ve t = b0 sonrası σ nın parçası
pozitif uzunluğu verir. Đkinci eşitlik X ( t ) > 0 olduğunu gösterir, bu yüzden σɺ ( t ) ,
nin pozitif çarpanıdır. σ birim hızlı olması için σɺ ( t ) , ∂
ve γ , t = R zamanında q boyunca ilerleyen ∂
∂r
∂r
∂
∂r
sahip olmalıyız. Böylece σ
nin integral eğrileridir, bu yüzden
σ = γ dir.
SONUÇ 2.2.3.2. p ∈ M etrafında herhangi jeodezik yuvarla birlikte r ( x ) radyal
12
uzaklık fonksiyonu, p den x e Riemann uzaklığına eşit r ( x) = ∑ ( x i ) 2 ile
i
tanımlanır.
ĐSPAT: p den x e, γ radyal jeodeziği Teorem 2.2.3.2 tarafından minimalizedir. Hızının,
normal koordinatlardaki hem g normu hem de Öklid normundaki birim vektör olan ∂
∂r
ye eşit olmasından γ nın uzunluğu r ( x ) olan Öklid uzunluğuna eşittir.
Bu sonuç, M deki jeodezik yuvarlar ve küreler için sadeleştirilmiş notasyonunu
belirtir. U = exp p ( BR ( 0 ) ) , p etrafında jeodezik yuvar ise, Sonuç 2.2.3.2., U nunu p
etrafında R yarıçaplı metrik yuvarına eşit olduğunu gösterir. Benzer şekilde, R yarıçaplı
jeodezik küre, R de olan p den uzaklığı olan noktaların kümesidir. Şimdiden p nin
normal komşuluk içinde duran böyle metrik yuvarlar ve kürelerin açık ve kapalı
jeodezik küreler ve yuvarlar için BR ( p ) = exp p ( BR ( 0 ) ) , BR ( p ) = exp p ( BR ( 0 ) ) ve
S R ( p ) = exp p ( ∂BR ( 0 ) ) notasyonlarını kullanacağız.
γ ul , noktaların her lifti arasında minimalize olacak şekilde herhangi t0 ∈ I U ∈ I
komşuluğuna sahip ise, γ : I → M eğrisi lokal minimalize diyebiliriz. Önemlidir ki,
minimalize eğri, otomatik olarak lokal minimalizedir çünkü noktaların herhangi ikisi
arasında minimalizedir.
51
TEOREM 2.2.3.3. Her Riemann jeodeziği lokal minimalizedir. [8]
ĐSPAT: γ : I → M açık aralıkta tanımlanan bir jeodezik ve t0 ∈ I olsun. ω, γ ( t0 ) ın
düzgün normal komşuluğu olsun ve U ⊂ I t0 ı içeren γ −1 ( w ) nın bağlantılı bileşenleri
olsun. t1 , t2 ∈ U ve gi = γ ( ti ) ise, düzgün normal komşuluğun tanımı, q2 nin q1 etrafında
bir jeodezik yuvarında içerildiğini gösterir. Bu nedenle Teorem 2.2.3.2. ile q1 den q 2
ye radyal jeodezik, bunların arasında tek bir minimalize eğridir. Oysa γ nın kısıtlanışı,
aynı jeodezik yuvarda ilerleyen q1 den q 2 ye bir jeodeziktir ve böylece γ , bu
minimalize jeodezik olmalıdır.
Gauss lemma ve onun sonuçları, ilk varyasyon formülü kullanmaksızın minimalize
eğrilerin, jeodezikler olduğu diğer ispatta kullanılır.
Teorem 2.2.2.1 nın diğer bir
ispatını da verecek olursak γ : [ a, b] → M bir
minimalize eğri parçası olsun. önceki ispattaki gibi, t 0 ∈ [a, b ] için γ (U ) nun, w
düzgün normal komşuluğundan içerilecek şekilde t0 ın bağlantılı U komşuluğunu
bulabiliriz. Daha sonra t1 , t2 ∈ U için yukarıdaki gibi aynı ifade, γ ( t1 ) den γ ( t2 ) ye tek
minimalize eğrinin, onları birleştiren radyal jeodeziği olduğu gösterir. γ nın kısıtlanışır,
böyle bir minimalize eğri oluğundan, bu radyal jeodezikle denk düşer. Bu nedenle γ , t0
komşuluğundaki jeodezik denklemini çözer t0 keyfi olduğundan γ , jeodeziktir.
52
BÖLÜM 3
KONNEKSĐYON VE KOORDĐNATLAR
Riemann geometrisinde, jeodezikler ve kovaryant türevler için metrik özelliğini
sağlayan Riemann manifoldu üzerinde belirli bir konneksiyon almamız gerekir. Bu
şekilde IR n uzayının gömme altmanifoldunda içerilen herhangi bir Riemann manifoldu
üzerinde tek bir konneksiyonu belirten iki özelliğini tanımlanır. Bunlar; metrikle
uyumluluğu ve simetriliğidir.
Bunun yanında jeodeziklerin kollektif davranışları, üstel dönüşüm, Riemann normal
komşulukları ve normal koordinatları tanımlanır.
3.1 Riemann Konneksiyonu
Riemann geometrisinde hesaplamalara özellikle uygun olan her Riemann
manifoldunda doğal konneksiyon vardır. IR n uzayının altmanifoldundaki jeodezik;
ivme vektör alanı, TM üzerinde sıfır tanjant projeksiyonu doğruya yakın olmalısı
konneksiyon diliyle belirtildiğinde;
M ⊂ IR n gömme altmanifoldu olsun. M deki herhangi bir vektör alanı, IR n
üzerinde düzgün bir vektör alanına genişletilebilir. X ve Y, IR n uzayına keyfice
genişletilebilir olsun. ∃p ∈ M , Π T : Tp ( IR n ) → Tp M ortogonal dönüşümü ve ∇ :Öklid
konneksiyonu olacak şekilde
∇T : T ( M ) × T ( M ) → T ( M )
T
( X , Y ) ֏ ∇ x (Y ) = Π T (∇ X Y )
dönüşüm olarak tanımlanır. Bu dönüşüm, aşağıdaki tanjant konneksiyon denilen M
üzerinde lineer konneksiyon üretir.
53
T
LEMMA 3.1.1. ∇ operatörü, iyi tanımlıdır ve M üzerinde bir konneksiyondur.
ĐSPAT: p∈M noktasında ∇ X Y
konneksiyonunun değeri sadece X p ye bağlı
T
olduğundan ∇ x (Y), X ’e genişletilen vektör alanının seçiminden bağımsızdır. Yani p
deki ∇ X Y nin değeri, X p nin başlangıç tanjant vektör eğrisi boyunca sadece Y nin
T
değerine bağlıdır. Böylece ∇ iyi tanımlıdır.
T
∇ x (Y), Y deki IR üzerinde ve X deki C ∞ (M) üzerinde olduğu bellidir. Konneksiyon
olduğunu göstermek için sadece çarpım kuralının doğruluğu gösterilir. f ∈C ∞ (M ) ,
IR n uzayında keyfice genişletilebilir olsun. M boyunca
T
∇ x ( f Y)= Π T ( ∇ X ( fY ))
T
= (Xf ) Π T Y+ f Π T ( ∇ x Y)
T
= (Xf ) Y+ f ( ∇ x Y)
(3.1)
T
elde ederiz. Böylece ∇ , konneksiyondur.
Tanjant konneksiyon yerine belirlenen metrikli IR n uzayının altmanifoldları
alınmasıyla genelliği değişmez. IR n uzayı üzerinde Öklid konneksiyonu,
∇X Y , Z = ∇XY , Z + Y , ∇X Z
(3.2)
şeklindedir. Bu şekilde g, M manifoldu üzerinde bir Riemann metriği olsun. ∀ X,Y,Z
vektör alanları için ∇ lineer konneksiyonu,
∇ X Y , Z = ∇ XY , Z + Y ,∇ X Z
(3.3)
şeklindedir ve bu durumda g ile uyumludur. [6]
LEMMA 3.1.2. Aşağıdaki şartlar
bir Riemann manifoldu üzerinde ∇ lineer
konneksiyonu için denktir:
(a) ∇ , g ile uyumludur.
(b) ∇ g ≡ 0 tir.
(c)V,W herhangi γ eğrisi boyunca bir vektör alanı ise
d
V , W = Dt V , W + V , Dt W
dt
olur.
(d)V,W bir γ eğrisi boyunca paralel vektör alanıysa bu durumda V , W sabittir.
54
(e) ∀ t0 ,t1 için Pt0t1 : Tγ ( to ) M → Tγ (t1 ) M paralel dönüşümü izometridir.
Ayrıca tanjant konneksiyonu
τ :T(M) × T(M) → T(M)
(X , Y)
֏ τ (X,Y)= ∇ X Y - ∇Y X - [ X , Y ]
2
olarak tanımlı -tensör alanı şeklindeki burulma fonksiyonunu içerir.
1
Eğer burulması yoksa yani
∇ X Y - ∇Y X ≡ [X , Y ]
ise, ∇ lineer konneksiyona simetrik denir. [8]
LEMMA 3.1.3. M ⊂ IR n
gömme altmanifoldu üzerinde tanjant konneksiyonu
simetriktir. [8]
TEOREM 3.1.1 (Riemann geometrinin temel lemması)
(M,g) bir Riemann manifoldu olsun. M üzerinde g ile uyumlu ve simetrik olan bir tek
∇ lineer konneksiyonu vardır.
Bu konneksiyona, g nin Riemann konneksiyonu ya da Levi-Civita konneksiyonu
denir.
ĐSPAT: ∇ tekliği ispatlamak için, X,Y,Z∈ T(M) keyfi vektör alanları olsun. X,Y,Z
için
X Y , Z = ∇ XY , Z + Y ,∇ X Z
Y Z , X = ∇Y Z , X + Z , ∇ Y X
Z X ,Y = ∇ Z X ,Y + X , ∇ZY
(3.4)
denklemlerini elde ederiz. Herbir basamakta son terimde simetrik şartını kullanarak
X Y , Z = ∇ X Y , Z + Y , ∇ X Z + Y , [X , Z ]
Y Z , X = ∇Y Z , X + Z , ∇Y X + Z , [Y , X ]
Z X , Y = ∇ Z X , Y + X , ∇ Z Y + X , [Z , Y ]
(3.5)
şeklinde yazılabilir. Bu denklemlerin ilk ikisini toplayıp üçüncüsünü çıkarttığımızda
X Y , Z + Y Z , X - Z X ,Y
=2 ∇ X Y , Z + Y , [ X , Z ] + Z , [Y , X ] - X , [Z , Y ]
elde ederiz.
(3.6)
55
Son olarak, ∇ X Y , Z için çözümünde
1
∇ X Y , Z = ( X Y , Z + Y Z , X - Z X , Y - Y , [ X , Z ] - Z , [Y , X ] + X , [Z , Y ]
2
(3.7)
bulunur.
∇1 , ∇ 2 simetrik ve g ile uyumlu olan iki konneksiyon olduğunu varsayalım. (3.7) nin
sağ tarafı, konneksiyona bağlı olmadığından ∀ X,Y,Z için ∇1X Y − ∇ 2X Y , Z =0 olduğu
çıkar. Böylece bütün X ve Y için ∇1X Y = ∇ 2X Y meydana gelir; bu yüzden ∇1 = ∇ 2 olur.
Bu durumda herbir koordinat haritasındaki böyle bir konneksiyonun var olduğu
gösterilmiş
olur.
Tekliği
için,
kapsayan
değişik
haritaların
birleşiminde
konneksiyonların kurulmuş olduğu sağlatılmalıdır.
(U , ( x )) , lokal koordinat haritası olsun. Lie braketleri sıfır olan koordinat vektör
i
alanına (3.7) yi uygulayarak
∇ ∂i ∂ j , ∂ ℓ =
(
1
∂i ∂ j , ∂ ℓ + ∂ j ∂ ℓ , ∂i − ∂ ℓ ∂i , ∂ j
2
)
(3.8)
elde ederiz.
Metrik katsayılarının tanımları ve Christoffel sembolleri;
g ij = ∂ i , ∂ j
0 , i≠ j
= 1 , i = j = 2,3,4
− 1 , i = j = 1
ve ∇ ∂ i ∂ j = Γijk ∂ ℓ şeklinde tekrar ifade edilir. (3.8) e bunları yerleştirirsek
∂ i ∂ j , ∂ ℓ = ∇ ∂i ∂ j , ∂ ℓ + ∂ j , ∇ ∂ i ∂ ℓ
= Γijk g kℓ + Γilk g kj
(3.9)
∂ j ∂ ℓ , ∂ i = ∇∂ j ∂ ℓ , ∂i + ∂l , ∇∂ j ∂i
= Γjkℓ g ki + Γijk g kℓ
(3.10)
∂ ℓ ∂ i , ∂ j = ∇∂ ℓ ∂i , ∂ j + ∂i , ∇∂ ℓ ∂ j
= Γℓki g kj + Γℓkj g ki
(3.9)+ (3.10)- (3.11)=
1
(2 Γijk g kℓ + Γilk g kj + Γjkℓ g ki - Γℓki g kj - Γℓkj g ki )
2
(3.11)
56
=
1
(2 Γijk g kℓ +( Γilk - Γℓki ) g kj +( Γjkℓ - Γℓkj ) g ki )
2
= Γijk g kℓ
(3.12)
eşitliğini verir.
Son olarak, g mℓ g ℓk = δ mk olan notasyonla ve g ℓk ters matrisiyle her iki tarafın
çarpılmasıyla
Γijk =
1 kℓ
g ( ∂ i g jℓ + ∂ j g iℓ - ∂ ℓ g ij )
2
(3.13)
elde edilir.
Bu formül, her bir atlas içinde bir konneksiyon tanımlar ve Γijk = Γjik olur. Böylece
sadece metrikle uyumluluğunu irdelemek gerekir. Bunun için de ∇g =0 olduğu
gösterilir. Koordinat çatısı açısından ∇g nin bileşenleri
g ij ,k = ∂ k g ij - Γkiℓ g ℓj - Γkjℓ g iℓ
dir. Burada
Γkiℓ g ℓj + Γkjℓ g iℓ =
1
1
( ∂ k g ij + ∂ i g kj - ∂ j g ki )+ ( ∂ k g ji + ∂ j g ki - ∂ i g kj )
2
2
= ∂ k g ij
(3.14)
sonucundan yararlanarak g ij ,k =0 bulunur.
Yukarıdaki konneksiyona göre jeodeziklere Riemann jeodezikler denir. Bu tanımda
en önemli sonuç, aşağıdaki lemmadır. Yani γ bir Riemann manifoldu üzerinde eğri
ise,her hangi t zamanda γ eğrisinin hızı γɺ , eğrinin hız vektör uzunluğudur. γɺ , t den
bağımsız ise sabit hız, 1’e eşit ise birim hızlı denir.
LEMMA 3.1.4.Bütün Riemann jeodezikleri, sabit hızlı eğriliklerdir.
ĐSPAT: γ , bir Riemann jeodeziği olsun. γɺ , γ boyunca paralel olduğundan γɺ = γɺ, γɺ
uzunluğu sabittir.
1
2
57
TEOREM 3.1.2. (Riemann konneksiyonun doğallığı)
~
ϕ : ( M , g ) → ( M , g~ ) izometri olduğunu farzedelim.
~
(a) ϕ* (∇ X Y ) = ∇ϕ* x (ϕ*Y )
~
şeklinde ϕ , g nin ∇ Riemann konneksiyonunu g~ nin ∇ Riemann konneksiyonuna
götürür.
(b) V, M deki bir γ eğrisi boyunca bir vektör alanı ise, bu durumda
~
ϕ* DtV = Dt (ϕ*V )
dir.
(c) ϕ ,jeodezikleri jeodeziklere götürür:
γ eğrisi, M deki p başlangıç noktalı ve V başlangıç hızlı jeodezikler ise bu durumda
~
ϕ γ , M daki ϕ ( p ) başlangıç noktalı ve ϕ*V başlangıç hızlı jeodeziktir. [8]
~
ĐSPAT: (a) ϕ *∇ :T(M) × T(M) → T(M)
(X , Y)
~
−1 ~
֏ (ϕ * ∇ ) X Y = ϕ* (∇ϕ* X (ϕ*Y ))
şeklinde dönüşüm tanımlanır.
~
ϕ * ∇ , M üzerinde simetrik bir konneksiyondur.(pull-back) g ile uyumlu olduğundan
~
Riemann konneksiyonun tekliğinden ϕ * ∇ = ∇ olur.
~
(b) ϕ * Dt : T( γ ) → T( γ )
şeklindeki formülle operatör tanımlanır ve Dt ye eşittir. Bir Riemann manifoldu
üzerinde konneksiyonu göstermek için, jeodezik bölgesel olarak minimalize olur. Bu
durumda konneksiyonun simetrisi belirleyicidir. Ayrıca
IR n
uzayının gömme
altmanifoldu üzerinde tanjant konneksiyonu simetrik ve metrikle uyumlu olduğundan
Riemann konneksiyonu, tanjant konneksiyonuyla denktir. Bu konneksiyon belirlenen
metrikli IR n uzayının M manifoldu, teğetsel konneksiyonu, simetrik ve uyumluluğu
olan Riemann konneksiyon şeklinde adlandırılır.
58
3.2. Üstel Dönüşüm
Riemann jeodezikleri için başlangıç noktası ve\veya başlangıç vektörü geçerli ise
jeodezikler nasıl değişebilir. Bu konuyu irdeleyeceğiz.
Başlangıç verisindeki jeodeziklerin bağımlılığı, üstel dönüşüm olan Riemann
geometrisinin temelini oluşturan tanjant demetlerinden manifolda bir dönüşümle
kodlanır.
TANIM 3.2.1. ε := {v ∈ TM : γ v, [ 0,1] içeren aralıkta tanımlanır.} , TM nin alt kümesi
üstel dönüşümün tanım kümesi olsun.
exp: ε → M
V ֏ exp(V)= γ V (1)
üstel dönüşümü tanımlanır. ∀ p∈M için exp p kısıtlanmış üstel dönüşümü, exp üstel
dönüşümünün ε p = ε ∩ T p M kümesine kısıtlanmasıdır.[8]
TEOREM 3.2.1. (Üstel dönüşümün özellikleri)
(a) ε , sıfır kesitini içeren TM nin bir açık altkümesidir ve ∀ε p kümesi için sıfıra
göre yıldız şekillidir (star-shaped).
(b) ∀V ∈ TM için γ V jeodeziği, tanımlanan bütün t’ ler için
γ V (t)= exp(tV)
olarak verilir.
(c) Üstel dönüşüm C ∞ dur.
Đspatlamadan önce bazı özellikleri vermeliyiz. [8]
LEMMA 3.2.1. Herhangi bir V∈TM ve c,t∈IR için tanımlandığında
γ cV (t)= γ V (ct)
olur. [8]
ĐSPAT : γ V nin tanım kümesinin, I ⊂ R açık aralığında olduğunu farzedelim.
Basitleştirmek için, γ = γ V yazın ve C −1 I = {t : ct ∈ I } diye ifade edilen γ~ (t ) = γ (ct )
nin yeni γ~ eğrisini tanımlayın γ~ ’nin p başlangıç noktalı ve cV başlangıç hızlı jeodezik
olduğunu ve daha sonra γ cv na eşit olması gereken tekliği tarafından takip ettiğini
göstereceğiz.
59
Bu, γ~ (0) = γ (0) = p tanımından kaynaklanmaktadır. Herhangi bir yerel koordinata
γ (t ) = (γ ′(t ),..., γ n (t )) yazarsak, dizi kuralı
γ~ i (t ) =
d i
γ (ct )
dt
= γ i (ct )
(3.15)
denklemini verir.
Özellikle, γ~ (0) = cγɺ (0) = cV olarak takip eder.
~
Şimdi Dt ve Dt arasıyla γ ve γ~ boyunca kovaryant diferansiyel operatörlerini
simgelesin. Tekrar koordinatlara zincir kuralanı uygulayarak
d k
~ɺ
k
~j
Dtγ (t ) = γɺ (t ) + Γij γˆ (t ))γ (t ) ∂k
dt
= (c 2γɺɺk (ct ) + c 2 Γijk (γ (ct ))γɺ i (ct )γɺ j (ct )) ∂k
= c 2 Dtγɺ (ct ) = 0
(3.16)
Bu nedenle γˆ , bir jeodeziktir ve dolayısıyla söylendiği gibi γ~ = γ cV dir.
Teorem 3.2.1 in ıspatı t = 1 için; exp(cV ) = γ cV (1) = γ V (c) olduğu söylenir ki bu da (b)
yi verir. Dahası V ∈ ε p , γ V tanımı en az [ 0,1] aralığında tanımlanır. Bunun için
0 ≤ t ≤ 1 aldığımızda teorem, exp ( tV ) = γ tV (1) = γ V ( t ) tanımlı olduğunu söyler. Bu,
ε p ’nin yıldız-şekli olduğunu gösterir.
(x ) , U ⊂ M
i
(
)
açık kümesi üzerinde herhangi yerel koordinatlar olsun ve xi , vi ,
π −1 ( u ) üzerinde
σ ( x ,v ) = V k
∂
∂
− V iV j Γijk ( x ) k
k
∂X
∂V
vektör alanını tanımlayalım. σ nin integral eğrileri
xɺ k ( t ) = V k ( t ) ,
(3.17)
60
Vɺ k ( t ) = −V i ( t ) V j ( t ) Γijk ( x ( t ) )
(3.18)
şeklinde bulunur.
Bu, V k = xɺ k nı (3.18) denkleminde yerine koyduğumuzda birinci-mertebeden sistem
olduğunu gösterir. π −1 ( u ) üzerinde σ nin integral eğrileri π : ΤM → M projeksiyonu
(
)
altındaki jeodeziklere iz düşebilir. π ( X ( t ) , V ( t ) ) = X ( t ) dir; tersi olarak herhangi bir
γ ( t ) = ( X ′ ( t ) ,..., X n ( t ) ) jeodeziği, v′ ( t ) = xɺ i ( t ) alınarak σ integral eğrisine taşınır.
σ nin önemi, onun aslında jeodezik vektör alanı denilen TM tanjant demetinin total
uzayına
genişlemesinden
kaynaklanır.
Aşağıda
kanıtlanacak
olan
herhangi
f ∈ C α (TM ) , için σ , f üzerinde
σ f ( p, V ) =
d
dt
t =0
f ( γ V ( t ) , γɺV ( t ) )
(3.19)
şeklinde rol oynar.
Burada ve her uygun olduğunda, V nin tanjant olduğu noktayı vurgulamak
istememize bağlı olarak, V ∈ Τ p M elemanı için dönüşümlü olarak
( p, V )
ve X
notasyonlarını kullanırız.) Çünkü bu formül koordinatlardan bağımsızdır, bu da (3.17)
deki verileri σ nin çeşitli tanımlarının farklı koordinat sistemlerinde birbirini tuttuğunu
gösterir.
σ ’nin (3.19) u karşıladığını ispatlamak için, γ V ( t ) jeodeziklerin bileşenlerin
xi ( t ) = xɺ ( t ) şeklinde yazıyoruz. (3.18) deki dizi kuralını ve jeodezik denklemini
kullanarak (3.19) un sağ tarafı
∂f
∂X k
=
∂f
k
ɺk
X ( t ) ,V ( t ) X ( t ) + k ( X ( t ) ,V ( t ) ϕɺ ( t )
∂V
t =0
∂f
∂f
p,V ) V k − k ( p,V ) V iV j Γijk ( p )
k (
∂X
∂V
= σ f ( p, V )
olur.
(3.20)
61
Sonuçta θ i içeren açık bir aralıkta tanımlı (p,V) başlangıçlı θ ( p ,V ) = θ (t , ( p,V ) )
eğrisini alalım. Bu bize, σ nin integral eğrisi olan θ : ϑ → TM , C ∞ dönüşümü ve
{0}× TM ⊂ R × TM
Şimdi
( p, V ) ∈ ε
nin 0 açık komşuluğu olduğunu gösterir.
olduğunu farz edelim. Bu γ V jeodeziğinin en az [0,1] aralığında
tanımlandığı anlamına gelir ve böylece
eğrisidir.
(1, ( p,V ) ) ∈ϕ
(1, ( p,V ) ) nin
olduğundan, σ
( p,V ) ∈ TM
de başlayan σ nin integral
nin akısının tanımlandığı RxTM
açık komşuluğu vardır. Bu da
( p, V )
deki
nin açık bir komşuluğunun var
olduğu anlamına gelir. Bu, ε nun açık olduğunu gösterir.
Sonuç olarak jeodezikler, σ nin integral eğrilerinin projeksiyonu olduğundan , üstel
dönüşümün her tanımlı olduğu durumda
exp(V ) = γ V (1) = π θ (1, ( p, V ))
şeklinde ifade edilir ve bu nedenle exp, C ∞ dur.
Riemann konneksiyonun doğallığı ve jeodeziklerin tekliğini aşağıdaki üstel
dönüşümün önemli doğallık özelliğine dönüşür.
TEOREM 3.2.2. (Üstel dönüşümün doğallığı)
ϕ : ( m, g ) → ( m, g ) bir izometri olduğunu varsayalım. Daha sonra herhangi p ∈ M
için aşağıdaki diagrama
ϕ*
~
Tp M → Tϕ ( p ) M
exp p ↓
↓ expϕ ( p )
~
M→ M
ϕ
karşılık gelir. [8]
62
3.3. Normal Komşuluklar ve Normal Koordinatlar
Herhangi bir p ∈ M noktasını alalım. Bu noktada tanımlı üstel dönüşüm, T p M
tanjant uzayını ε p ⊂ M açık kümesine götürür.
LEMMA 3.3.1. (Normal Komşuluk Lemması)
Herhangi bir p ∈ M için
exp p : ϑ → U
diffeomorfizm olan p ∈ M nin bir U komşuluğu ve T p M de orijinin bir ϑ komşuluğu
vardır. [8]
ĐSPAT:
( exp ) ,
p *
sıfırda izdüşürülebilir olduğunu göstermek için ters fonksiyon
teoreminden yararlanılır. T p M bir vektör uzayı olduğundan T0 (T p M ) = Tp M doğal bir
özdeşlik dönüşümüdür. Bu tanımlama altında exp p ( exp p ) : T0 (Tp M ) = Tp M → Tp M
*
birim dönüşümdür.
Keyfi bir V ∈ Tp M vektörünü alalım.
( exp ) V
p *
hesaplamak için, başlangıç tanjant
vektörü V olan, 0 da başlayan T p M deki τ eğrisini seçmeye ve exp p τ (t ) bileşik
eğrisinin başlangıç tanjant vektörünü hesaplamaya ihtiyacımız vardır. Böyle bir eğri
τ ( t ) = tV olduğu açıktır. Böylece
( exp p )* V =
d
dt
t =0
( exp
p
oτ ) ( t ) =
d
dt
t =0
exp p ( tV ) =
d
dt
t =0
γ V (t ) = V
(3.21)
p ∈ M nin herhangi U açık komşuluğu, p nin normal komşuluğu denilen
0 ∈ Tp M nin yıldız-şekilli açık komşuluğunun exp p nin β ε (0) ∈ T p M yuvarı üzerinde
diffeomorfizmi ise (yuvarın yarıçapı, g ile tanımlanan norma göre ölçülür), daha sonra
exp p ( βε ( 0 ) ) görüntü kümesine M deki jeodezik yuvar denir. Ayrıca, βε ( 0 ) kapalı
yuvarı,
exp p
diffeomorfizm olduğu V ∈ T p M açık bir
kümesini içerir ise,
exp p ( β ε ( 0 ) ) kapalı jeodezik yuvar ve exp p ( ∂β ε ( 0 ) ) jeodezik küre denir.
63
Şekil 4.1. Riemann normal koordinatları
T p M için { Ei } ortonormal bazı, E : IR n → Tp M
(x , x
1
2
)
(
)
,..., x n ֏ E x 1 , x 2 ,..., x n = x i E i
izomorfizmasını verir. U, p nin normal komşuluğu ise,
ϕ = E −1 exp −p1 : U → E n
koordinat haritasını elde etmek için üstel dönüşümle bu izomorfizmayı birleştirebiliriz.
Böyle herhangi koordinatlara, p merkezli (Riemann) normal koordinatları denir.
p ∈ M ve p nin bir U normal komşuluğu verildiğinde, normal koordinat haritaları ve
ortonormal bazlar arasında (1-1) eşleme vardır.
Herhangi bir p merkezli normal koordinat haritasında
∂
xi ∂
:=
∂r
r ∂xi
ile
∂
birim radyal vektör alanı ve
∂r
12
r ( x) = ∑ ( x i ) 2
i
ile radyal uzaklık fonksiyonu tanımlanır. Öklid uzayından r(x) orijine uzaklıktır ve
∂
,
∂r
orijin boyunca düz doğruya teğet birim vektör alanıdır. Bir sonraki önerme gösterir ki,
normal koordinatlardaki herhangi bir metrik için özel geometrik anlama da sahiptir.
64
TEOREM 3.3.1. (Normal Koordinatların Özellikleri)
(U , ( x )) , p merkezli herhangi bir normal koordinat haritası olsun.
i
(a) Herhangi bir V ∈ V i ∂ i ∈ Tp M için V başlangıç hızlı vektörü p başlangıçlı γ V
jeodeziği, U içerisinde kaldıkça
γ V ( t ) = ( tV 1 ,..., tV n )
radyal doğru parçası ile normal koordinatlarda temsil edilir.
(b) p nin koordinatları, (0,…,0) dır.
(c) p de metriğin bileşenleri ηij = δ ij dir.
(d) U da içerilen herhangi bir { x : r ( x ) < ε } Öklid yuvarı, M deki jeodezik yuvardır.
(e) Herhangi bir q ∈ U − p noktasında
∂
, p den g ye birim hızlı jeodeziğin hız
∂r
vektörleridir ve bu nedenle g ye göre birim uzunluğuna sahiptir.
(f) g nin birinci kısmi türevleri ve Christofel sembolleri p de sıfırdır.[8]
Normal koordinatlar, Riemann geometrisindeki hesaplamalar için önemli bir araçtır.
Bu yüzden önceki önermedeki ifade edilen özellikler dikkatli bir şekilde irdelenmelidir.
Bu ispatlar, p başlangıçlı jeozediklerin normal koordinatlarda basit formullere sahip
olduğu gerçeğinin apaçık sonuçlarıdır. Bu formülden dolayı, p başlangıcı ve p nin
binormal komşuluğunda uzanan jeodeziklere, radyal jeodezikler denir. (fakat uyarmak
gerekir ki, p boyunca ilerlemeyen jeodezikler genelde normal koordinatlarda basit bir
forma sahip değildir.)
Daha sonra jeodeziğin minimalize özelliklerini çalışmada kullanmak için normal
komşulukların içeriğinin aşağıda düzenlenmesine ihtiyacımız vardır. wi ∈ W ⊂ M açık
kümesine wi nin noktalarının etrafında δ > 0 yarıçaplı jeodezik yuvar tanımlanıyor ise,
düzgün normal denir.
LEMMA 3.3.2. (Düzgün Normal Komşuluk Lemması)
p ∈ M ve p nin herhangi bir U komşuluğu verilsin, U da içerilen p nin düzgün
normal komşuluğu vardır. [8]
65
Şekil 4.2. Düzgün normal komşuluğu
ĐSPAT: Üstel dönüşüm, TM nin açık bir ε alt kümesi üzerinde tanımlanır. Bunun için
de
F :ε → M × M
( q, v ) ֏ F ( q,V ) = ( q, exp p V )
dönüşümü tanımlanır. p merkezli M için
(x )
i
normal koordinat haritası seçilsin ve
(x , v ) , TM üzerinde eşlenmiş standart koordinatları belirtmiş olsun. bu koordinatlarda,
i
i
( p, o )
da F nin Jakobien matrisi, dönüşümlü olan
∂x i
∂x i
j
∂x
∂v j
F* =
∂ expi ∂ expi
∂v j
∂x j
0
Id
Id
*
=
0
− Id
* − Id
i = j = 2,3,4
i = j =1
şeklinde yazılır. Böylece ters fonksiyon teoremiyle F, TM deki (p,0) noktasında tanımlı
komşuluk üzerinde bir diffeormorfizmdir.
Herhangi y∈ M açık kümesi ve herhangi δ > 0 için, Yδ ,
Yδ = {( p, v) ∈ TM : p ∈ Y , v < δ }
şeklinde tanımlı olup TM nin altkümesini belirtir. Standart koordinatlardaki v < δ
eşitsizliğini
yazarak
Yδ nın TM topolojisinde açık olduğu kolayca görülür.
( p,0) ∈Yδ ⊂ ϑ şeklinde Yδ formun bazı kümelerinin olduğunu göstereceğiz. TM
üzerindeki topolojiye göre lokal trivializasyonlar birim dönüşüm altında açık kümelerin
çarpımı tarafından oluşturulur. Y
δ
kısıtlanmış normu bize,
66
χ = {( x, v ) : r ( x) < 2ε , ε > 0}
kümesinin varlığını gösterir. K = {( x, v ) : r ( x ) ≤ 2ε , v δ = 2ε } kompakt kümesi üzerinde
g normu sürekli ve sıfır değildir. Bu nedenle pozitif sabitler üzerinde sınırlıdır. Bu
normlar, herhangi λ pozitif sabiti için, λV = λ V sağlanmasıyla homojen olduğunda;
V ∈ Tx M , r ( x ) ≤ ε durumda c V g ≤ V g ≤ C V
g
olduğunu takip eder.
Şimdi Y = {x : r ( x) < ε } ⊂ M kümesi ve δ = cε olsun. Seçimlerimizin her ( x,υ ) ∈ Yδ
durumunda v g ≤ (1/ c ) v g < ε olduğunu garanti eder. Bu yüzden Yδ ⊂ χ olur.
F, Yδ üzerinde diffeomorfizm olduğundan ve (p,0) dan (p,p) ye götürdüğünden
( p, p ) ∈ W × W ⊂ F (Yδ )
şeklinde W × W ⊂ M × M açık çarpım kümesi vardır. W
kısıtlanması gerekliyse W ⊂ Y olduğunu da kabul edebiliriz. W kümesi hakkında iki
iddia oluşur: Herhangi q ∈ W için (1) exp q , βδ ( 0 ) ⊂ Tq M üzerinde diffeomorfizmdir ve
(2) W ⊂ exp q (Bδ (0) ) dir. W nin, p nin gereken düzgün normal komşuluğu olduğunu bu
iddialardan sonuçlanır.
Đddia (1) ispatı için;
∀q ∈ W için exp q nun Bδ (0) ⊂ Tq M altkümesi üzerinde
tanımlı olan, F (q,V ) = (q, exp q V ) her V q < δ olduğunda F nin Yδ üzerinde tanımlı
olduğuna dikkat edelim. Çünkü F, F (q,V ) = (q, exp q V ) formuna sahiptir. Tersi ise, C ∞
olan
ϕ
dönüşümü
için
benzer
F −1 (q,V ) = (q, ϕ (q, y ))
formuna
sahiptir.
ϕq ( y ) = ϕ ( q, y ) notasyonunu kullanalım. Çünkü daha sonra F F −1 , Yδ üzerinde
birim dönüşümü olup, ϕ q o exp q nin ∀q ∈ W ⊂ Y için Bδ (0) ⊂ Tq M üzerinde birim
olduğunu takip eder. Benzer şekilde F (Yδ ) üzerinde FoF −1 = Id , exp q oϕ q nin
exp q ( Bδ ( 0 ) ) üzerinde birim olduğu anlamına gelir, bu yüzden Đddia (1) ispatlanır.
Son olarak iddia 2 ye bakalım.
( q, y ) ∈ W × W
keyfi olsun. W × W ⊂ F (Yδ )
olduğundan, ( q, y ) = F ( q, V ) = ( q, exp q V ) sağlayan bazı V ∈ Bδ (0) ⊂ Tq M vardır. Bu,
öncelikle ispatlanan y = exp q V doğru olduğunu gösterir.
67
BÖLÜM 4
EĞRĐSEL YAPI FORMÜLLERĐ
4.1. Model Uzayların Jeodeziği
g Öklid metrikli IR n üzerinde metrik katsayıları, standart koordinat sisteminde
sabitleridir. Bu yüzden Christofel sembollerinin bu koordinatlarda tamamen sıfır olduğu
aşikardır. Bu, Öklid uzayı üzerinde Riemann konneksiyonun tam olarak Öklid
konneksiyon olduğu anlamına gelir ve böylece sabit katsayılı vektör alanları paraleldir
Küreler
R yarıçaplı S R2 2-küresi üzerinde, küresel koordinatlar denen doğrudan Christofel
sembolleri hesaplamak ve aşağıdaki örnekteki gibi meridyenlerin jeodezik olduğunu
göstermek çok zor değildir. Şöyleki
( x, y, z ) = ( R sin ϕ cos θ ,
şeklinde
kürenin
R sin ϕ sin θ , R cos ϕ ) , −π < θ < π , 0 < ϕ < π
S R2 − {( x, y, z ) : x ≤ 0, y = 0} altkümesi
üzerinde
(θ , ϕ ) küresel
koordinatları tanımlasın.
(a) Küresel koordinatlarda R yarıçaplı dairesel metrik, δ R = R 2 dϕ + R 2
şeklinde olur.
(b) Küresel koordinatlardaki g R nın Christoffel sembolleri hesaplanabilir.
(c) Küresel koordinatlardaki jeodezik denklemi kullanılarak her (θ ( t ) , ϕ ( t ) )
meridyenin jeodezik olduğu doğrulanabilir.
Bunun gibi basit durumlarda bile bu örneği yaparken jeodezik denkleminin doğrudan
hesaplanmasıyla, yeterince büyük sayıları içerdiğini görebiliriz. Metrik çok karmaşık
veya boyutlarının sayısı yüksek olduğunda, bu yaklaşım zor olabilir. Bu
jeodezik analizi ile diğer teorileri de ele almalıyız.
yüzden
68
Neyse ki, kürenin homojen ve izotropik olması bütün boyutlarındaki jeodezikleri
belirlemek için çok daha kısa bir yolu verir.
TEOREM 4.1. S R2 üzerinde jeodezikler, öncelikle (orijin boyunca iki-düzlemi S Rn nin
kesişimi) sabit hızlı parametrizasyonlu büyük çemberdir.[8]
ĐSPAT: Önce, V başlangıç hızı ile, ∂1 in katı olan N kuzey noktasında başlayan
γ ( t ) = ( x′ ( t ) ,..., x n +1 ( t ) ) jeodeziğini değerlendirelim. Bu jeodeziğin x 2 = ... = x n = 0
meridyeni boyunca aynen kalması, simetri ile sezgisel olarak kanıtlanır. Bu sezgiyi
titizlikle meydana getirmek için bazı 2 ≤ i ≤ n için x′ ( t0 ) ≠ 0 olan t0 zamanı önceden
farzettiğimizi kabul edelim. Diğer sabitlenen koordinatlardan ayrılan ve x i yi − x i ye
götüren ϕ : R n+1 → R n+1 lineer dönüşümü, N = γ ( 0 ) ve V = γɺ ( 0 ) sabitlenen kürenin bir
izometrisidir ve bu nedenle γ ’yı γ ya götürür. Fakat ϕ ( ∂ ( t0 ) ) ≠ γ ( t0 ) olduğundan
çelişkidir.
2
Şekil 4.1. Simetrik S üzerinde jeodeziklerin özdeşlemesi
Jeodezikler, sabit hıza sahip olduğundan N başlangıç noktalı ve c∂1 başlangıç
vektöre sahip jeodezik, S Rn nin sabit hzlı parametrizasyonlu ( x1 , x +1 ) -düzleminin
kesişimindeki çember olmalıdır. Herhangi diğer başlangıç noktasını N’ ye, herhangi
diğer başlangıç vektörünü bu formun birine götüren ortogonal dönüşüm olduğundan ve
ortogonal
dönüşümler,
orijin
boyunca
düzlemleri
düzlemlere
götürdüğünden
S Rn üzerinde jeodezikler, öncelikle orijin boyunca 2-düzlemle S Rn nin kesişimidir.
69
Hiperbolik Uzaylar
H Rn nin jeodezikleri, kürenin durumundaki gibi homojenlik ve izotopiyi kullanarak
belirlenir.
TEOREM 4.2. Hiperbolik uzaylar üzerinde jeodezikler, sabit hızlı parametreli
aşağıdaki eğrilerdir:
Sekil 4.2 yuvarın jeodeziği
Şekil 4.3 yarı uzayın jeodeziği
HĐPERBOLOĐD MODEL: Büyük hiperbol ya da orijin boyunca 2-düzlemle H Rn nin
kesişimidir
YUVAR MODELĐ: ∂BRn ortogonaliyle kesişen orijin boyunca doğru parçaları ve
dairesel yaylardır.(şekil 4.2)
YARI-UZAY MODELĐ: y=0 hiperdüzlemi merkezli yarıdoğrular ve yarıçemberler
(şekil 4.3)
70
4.2. Serret-Frenet Formülleri
E14 uzayındaki α (s ) eğrisi boyunca hareket eden Frenet çatısını {T , N , B, E} olarak
gösterelim. Bunlar sırasıyla tanjant, asal normal, binormal ve trinormal vektör alanları
olarak adlandırılır. g (α ′( s ), α ′( s )) = ± 1 olduğunda α (s ) spacelike ya da timelike eğrisi
s yay uzunluğu fonksiyonuyla parametrizelendirilir denir.
Bu şekildeki eğri için Frenet denklemleri aşağıdaki gibi verilir:
Durum 1 : α spacelike eğri olsun. bu durumda T spacelike vektör ve N asal
normali aşağıdaki durumları alır:
Durum 1.1. N spacelike olduğunda B aşağıdaki alt durumları alır:
Durum 1.1.1. B spacelike ise Frenet formülü,
T ′ 0
N ′ − k
= 1
B′ 0
E ′ 0
k1
0
0
k2
− k2 0
0
k3
0
0
k3
0
T
N
B
E
g (T , T ) = g ( N , N ) = g ( B, B) = 1 , g ( E , E ) = −1 ortogonal vektörler şeklinde ifade
edilir.
Durum 1.1.2. B timelike ise Frenet formülü,
T ′ 0
N ′ − k
= 1
B′ 0
E ′ 0
k1
0
0
k2
k2 0
0
k3
0
0
k3
0
T
N
B
E
g (T , T ) = g ( N , N ) = g ( E , E ) = 1, g ( B, B ) = −1 ortogonal vektörler şeklinde ifade
edilir.
Durum 1.2. N timelike olduğunda ise Frenet formülü,
T ′
N ′
=
B′
E ′
0
k1
k1 0
0
k2
0
k2 0
0
0 − k3
0 T
0 N
k3 B
0 E
71
g (T , T ) = g ( B, B ) = g ( E , E ) = 1, g ( N , N ) = −1 ortogonal vektörler şeklinde ifade
edilir.
Durum 2. α timelike eğri olduğunda T timelike vektör olur ve Frenet formülü,
T ′
N ′
=
B′
E ′
0
k1
k1 0
0
k2
0 − k2 0
0
0 − k3
0
0
k3
0
T
N
B
E
g ( N , N ) = g ( B, B) = g ( E , E ) = 1, g (T , T ) = −1 ortogonal vektörler şeklinde ifade
edilir. Buradaki k1 , k 2 , k3 sırasıyla α eğrisinin birinci, ikinci ve üçüncü
eğrilikleridir.[8]
TEOREM 4.2.1. α ∈ E14 keyfi bir spacelike eğrisi olsun. Bu durumda Frenet çatısı
T=
α′
,
α′
2
α ′ .α ′′ − g (α ′, α ′′).α ′
N=
2
α ′ .α ′′ − g (α ′, α ′′).α ′
E=±
T ∧ N ∧ α ′′′
,
T ∧ N ∧ α ′′′
B = ±N ∧T ∧ E ,
2
k1 =
k2 =
k3 =
şeklinde ifade edilir.[11]
α ′ .α ′′ − g (α ′, α ′′).α ′
α′
4
T ∧ N ∧ α ′′′ . α ′
2
α ′ .α ′′ − g (α ′,α ′′).α ′
g (α (ıv ) , E )
T ∧ N ∧ α ′′′ . α ′
,
,
72
4.3. E14 Uzayındaki Eğrinin Đnvolütü
Bir eğrinin teğetleri, α eğrisinin asal normalleri oluyorsa α * eğrisine α eğrisinin
involütü denir. Aynı durumda α eğrisi de α * eğrisinin evolütüdür.
TEOREM 4.3.1. α ve α * s yay uzunluğuyla parametrize edilmiş birim hızlı spacelike
eğrileri olsun. Frenet çatıları sırasıyla {T , N , B, E , k1 , k 2 , k3 } ve {T * , N * , B * , E * , k1* , k 2* , k 3* }
formundadır. α eğrisinin involütü olan α * eğrisini bulunuz.
ĐSPAT: Đnvolütün tanımından dolayı
α * ( s ) = α + λT
(4.1)
olarak yazılır. Đki tarafının s ye göre diferansiyeli alındığında
dα * ds * dα d λ
dT
=
+
T +λ
λk1 N
*
ds ds ds ds
ds
T* =
ds
ds *
dλ
) + λk1 N
T (1 +
ds
(4.2)
elde edilir. Đnvolüt tanımı dikkate alındığında T ⊥ T * olduğundan
T ,T * =0 ⇒
ds 2
dλ
) + λk1 N ⋅ T =0
T (1 +
*
ds
ds
⇒ 1+
dλ
=0
ds
⇒ λ =c−s
(4.3)
c sabit olacak şekilde elde edilir. Bunu (4.1) denkleminde yerine koyarsak;
α * (s)= α + (c − s ) T
(4.4)
denklemine sahip olunur. Bu ifadenin her iki tarafının s ye göre diferansiyeli alındığında
T*
ds *
= (c − s ) k1 N
ds
elde edilir. Eşitliğin iki tarafının normu alındığında,
(4.5)
73
T* = N ,
ds *
= (c − s ) k1
ds
(4.6)
elde edilir. (4.4) denklemini s ye göre 4 kez diferansiyeli alındığında birinci türev (4.5)
denkleminden
′
α * = (c − s) k1 N
olduğunu gösterildi. Diğerleri ise;
2
′
(α * )′′ = − (c − s )k1 T + (−k1 + (c − s )k1 ) N + (c − s )k1k 2 B
′
′
″
(α * )′′′ = 3( s − c)k1k1 + 2k12 T + ( s − c)k1 (k12 + k 22 ) − 2k1 + (c − s )k1 N
′
′
+ 2(c − s )k1 k 2 + (c − s )k1k 2 − 2k1k 2 B + ((c − s )k1k 2 k 3 )E
= u1T + u 2 N + u3 B + u 4 E
(α * )ıv = v1T + v2 N + v3 B + v4 E
(4.7)
şeklinde ifade edilir. Asal normal ve birinci eğriliği ise;
2
N =
*
=
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
2
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
(k1 ,0,−k2 ,0)
k 22 − k12
2
k1 =
*
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
(α * )′
( s − c) 3 k1
3
=
=
k 22 − k12
( s − c) 4 k1
k 22 − k12
( s − c)k1
4
4
(4.8)
elde edilir. Sıra binormal, trinormal,ikinci eğriliğe ve üçüncü eğriliğe geldiğinde,
74
− e1
e2
0
T * ∧ N * ∧ (α * )′′′ = −
e3
e4
(c − s )k1 0
0
k1
k −k
2
2
2
1
u1
=
E* = ±
− k1
0
k 22 − k12
u2
(c − s )k1
u3
0
u4
[k 2u4 ,0, k1u4 ,− k1u3 − k2u1 ]
k 22 − k12
T * ∧ N * ∧ (α *)′′′
T * ∧ N * ∧ (α *)′′′
[k 2u 4 ,0, k1u 4 ,− k1u3 − k 2u1 ]
=±
k 2 u 4 + k1 u 4 + (k1u 3 + k 2u1 ) 2
2
2
2
2
A
A
=±
B* = ± N * ∧ T * ∧ E *
− e1
e2
e3
e4
0
k2
0
k1
k 22 − k12
=±
(c − s )k1
0
k2 u4
A
=
k2 =
k1 u 4
A
0
0
− (k1 u3 + k 2u1 )
A
[
2
2
2
2
2
k 2 u 4 + k1 u 4 + (k1u3 + k 2u1 ) 2 k 22 − k12
T * ∧ N * ∧ (α *)′′′ . (α * )′
2
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
k 2 u 4 + k1 u 4 + (k1u 3 + k 2 u1 ) 2
2
=
*
0
(c − s )k1 (k1u3 + k 2u1 )k 2 , 0 ,k1 (k1u3 + k 2u1 ), k12u 4 + k 2 u 4
*
k3 =
k 22 − k12
2
2
2
(k 22 − k12 )( s − c)k1
g ((α * ) (ıv ) , E )
T * ∧ N * ∧ (α *)′′′ . (α * )′
]
75
=
(v4 )
(c − s ) 2 k1
2
k 22 − k12
k 2 u 4 + k1 u 4 + (k1u 3 + k 2 u1 ) 2
2
2
2
2
(4.9)
olarak bulunur.
ÖRNEK 4.1. α ve α * , s yay uzunluğuyla parametrize edilmiş birim hızlı spacelike
eğrileri olsun. Frenet çatıları sırasıyla {T , N , B, E , k1 , k 2 , k3 } ve {T * , N * , B * , E * , k1* , k 2* , k 3* }
formundadır. α W -eğrisinin involütü olan α * eğrisini bulunuz.
Đnvolütün tanımından dolayı
α * (s)= α + λT
(4.10)
olarak yazılır. Đki tarafın s ye göre diferansiyeli alındığında
dα * ds * dα d λ
dT
=
+
T +λ
λk1 N
*
ds ds ds ds
ds
T* =
ds
dλ
T (1 +
) + λk1 N
*
ds
ds
(4.11)
elde edilir. Tanımı dikkate aldığımızda T ⊥ T * olduğundan,
T , T * =0 ⇒
ds 2
dλ
T (1 +
) + λk1 N ⋅ T =0
*
ds
ds
⇒ 1+
dλ
=0
ds
⇒ λ =c−s
(4.12)
c sabit olacak şekilde elde edilir. Bunu (4.10) denkleminde yerine koyarsak;
α * (s)= α + (c − s ) T
(4.13)
denklemine sahip olunur. Bu ifadenin her iki tarafının s ye göre diferansiyeli
alındığında,
ds *
T
= (c − s ) k1 N
ds
*
elde edilir. Eşitliğin iki tarafının normu alındığında,
T* = N ,
(4.14)
76
ds *
= (c − s ) k1
ds
elde edilir. (4.13) denklemini s ye göre 4 kez diferansiyeli alındığında birinci türev
(4.14) denkleminden
′
α * = (c − s ) k1 N
olduğunu gösterildi. Diğerleri ise;
(α * )′′ = ( s − c)k1 T − k1 N + (c − s )k1k 2 B
2
( ) (
)
(α * ) ′′′ = 2k12 T + ( s − c)k1 (k12 + k 22 ) N + (− 2k1k 2 )B + ((c − s )k1k 2 k 3 )E
[
]
(α * )ıv = (c − s ) k1 (k12 + k 22 ) T + 3k1 (k12 + k 22 ) N + ( s − c)k1k 2 (k12 + k 22 ) B − 3k1k 2 k 3 E
2
şeklinde bulunur.
2
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
N =
*
=
2
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
(k1 ,0, k 2 ,0)
k 22 − k12
2
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
k1 =
*
(α * )′
( s − c) 3 k1
k 22 − k12
3
=
( s − c) 4 k1
=
4
4
k 22 − k12
( s − c)k1
elde edilir. Sıra binormal, trinormal,ikinci eğriliğe ve üçüncü eğriliğe geldiğinde,
− e1
e2
(c − s )k1
0
T * ∧ N * ∧ (α * )′′′ = −
k1
k 22 − k12
2k1
2
0
((s − c)k (k
1
2
1
e3
e4
0
0
k2
0
k 22 − k12
+ k 22 )
) (− 2k k ) ((c − s)k k k )
1 2
1 2 3
77
(c − s )k1 k 2
2
=
k 22 − k12
[k 2 k3 (c − s ),0, k1k3 (c − s),− 4k1 ]
T * ∧ N * ∧ (α *)′′′
T * ∧ N * ∧ (α *)′′′
E* = ±
[k 2 k3 (c − s),0, k1k3 (c − s ),− 4k1 ]
=±
k 2 k3 (c − s ) 2 + k1 k3 (c − s ) 2 + 16k1
2
2
2
2
2
B* = ± N * ∧ T * ∧ E *
− e1
e2
k1
0
k −k
2
2
=±
2
1
k 2 k 3 (c − s )
A
0
k − k12
0
=
2
k 2 k3 (c − s ) 2 + k1 k 3 (c − s ) 2 + 16k1
2
2
2
2
2
2
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
2
2
2
2
(k 22 − k12 )(c − s )
g ((α * ) (ıv ) , E )
T * ∧ N * ∧ (α *)′′′ . (α * )′
− 3k1k2 k3 k22 − k12
(c − s ) 2 k1 k2 k2 u4 + k1 u4 + (k1u3 + k2u1 ) 2
olarak bulunur.
3
2
2
2
2
]
k 22 − k12
T * ∧ N * ∧ (α *)′′′ . (α * )′
2
*
− 4k1
A
2
k 2 k 2 k 3 (c − s ) 2 + k1 k 3 (c − s ) 2 + 16k1
k3 =
0
k1k3 (c − s )
A
0
[
*
=
k2
(c − s )k1 (4k1k 2 , 0 ,4k1 , (c − s )k 3 (k12 − k 2 )
=±
k2 =
e4
2
2
(c − s )k1
0
e3
78
4.4. E14 Uzayındaki Bertrand Eğri Çifti
α ve α * eğrilerinin noktaları arasında karşılıklı noktada asal normalleri ortak olacak
biçimde 1-1 eşleme varsa böyle eğrilere bertrant eğrileri denir. λ , µ ∈ IR olacak
şekilde Öklid uzayında Bertrant eğrilerinin eğrilikleri arasında λk1 + µ k 2 = 1 eşitliğine
sahiptir.
TEOREM : α ve α * s yay uzunluğuyla parametrize edilmiş birim hızlı spacelike
eğrileri olsun. Frenet çatıları sırasıyla {T , N , B, E , k1 , k 2 , k3 } ve {T * , N * , B * , E * , k1* , k 2* , k 3* }
formundadır. α eğrisini, eğrilikleri sabit olan W-eğrisi alarak α * Bertrant eğri çiftini
bulunuz.
ĐSPAT: Bertrant eğrilerinin tanımından dolayı
α * (s)= α + λN
(4.15)
olarak yazılır. Đki tarafının s ye göre diferansiyeli alındığında,
dα * ds * dα d λ
dN
=
+
N +λ
*
ds ds ds ds
ds
T* =
ds
dλ
T (1 − λk1 ) +
N + λk 2 B
*
ds
ds
(4.16)
elde edilir. Tanımı dikkate aldığımızda N ⊥ T * olduğundan,
ds
dλ
(1 − λk1 )T ⋅ N + N ⋅ N + λk 2 B ⋅ N =0
*
ds
ds
N , T * =0 ⇒
⇒
dλ
=0
ds
⇒λ=c
(4.17)
c sabit olacak şekilde
α * (s)= α + λ N
(4.18)
denklemi elde edilir. Bu ifadenin her iki tarafının s ye göre diferansiyeli alındığında,
T*
ds *
= ((1 − λk1 )T + λk 2 B )
ds
(4.19)
79
elde edilir. Eşitliğin iki tarafının normu alındığında,
ds *
2
= λ2 k 2 − (1 − λk1 ) 2
ds
elde edilir. (4.18) denkleminin s ye göre 4 kez diferansiyeli alındığında birinci türev
(4.19) denkleminden,
′
α * = ((1 − λk1 )T + λk 2 B )
olduğunu gösterildi. Diğerleri ise
(
)
(α * )′′ = k1 − λk1 − λk 2 N + λk 2 k 3 E
2
2
(
) (
)
(α * )′′′ = k1 (− k1 + λk12 + λk 2 ) T + k 2 (k1 − λk12 − λk 2 + λk 3 ) B
2
(
2
2
)
(α * )ıv = − k1 + λk1 + 2λk1 k 2 − k1k 2 + λk 2 − λk 2 k 3 N
3
4
(
2
2
2
4
2
2
)
+ k 2 k 3 k1 − λk1 + λk 3 E
2
2
şeklinde ifade edilir. Asal normal ve birinci eğriliği ise;
2
N* =
=
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
2
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
[
λ2 k 2 2 − (1 − λk1 ) 2 (k1 − λ (k12 + k 2 2 )) N + λk 2 k 3 E
]
λ2 k 2 2 − (1 − λk1 ) 2 (k1 − λ (k12 + k 2 2 )) 2 + λ2 k 2 2 k 3 2
[(k − λ (k
=
1
2
1
+ k 2 )) N + λk 2 k 3 E
2
(k1 − λ (k1 + k 2 )) 2 + λ2 k 2 k 3
2
2
2
]
2
2
k1 =
*
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
(α * )′
4
(λ2 k 2 − (1 − λk1 ) 2 ) (k1 − λ (k1 + k 2 )) 2 + λ2 k 2 k 3
2
=
2
(λ2 k 2 − (1 − λk1 ) 2 ) 2
2
(k1 − λ (k1 + k 2 )) 2 + λ2 k 2 k 3
2
=
2
(λ2 k 2 − (1 − λk1 ) 2 )
2
2
2
2
2
2
80
elde edilir. Sıra binormal, trinormal,ikinci eğriliğe ve üçüncü eğriliğe geldiğinde,
− e1
e2
e3
e4
(1−λk1)
0
λk2
0
λ2k22 −(1−λk1)2
T* ∧ N* ∧(α*)′′ =−
λ2k22 −(1−λk1)2
(k1 −λ(k1 + k2 ))
2
0
(k (−k +λk +λk ))
1
2 2
2
2
2
2
1
1
(k1 −λ(k + k )) +λ k k
2
1
[λk2k3]
2
2 2 2
2 3
0
0
(k (k −λk −λk
2
2
2
1
2 1
)
(k1 −λ(k + k2 ))2 + λ2k2 k3
2
1
+ λk3 )
2
2
2 2
0
(
)
2
2
2
2
(k1 −λ(k1 + k2 ))k2 (k1 −λk12 −λk2 +λk3 )
(1−λk1)λk2k3
= 0,−
,0,
2
2 2
2 2
2
2 2 2
−
−
−
+
+
λ
λ
λ
λ
λ2k22 −(1−λk1)2 (k1 −λ(k12 + k22 ))2 + λ2k22k32
(
1
)
(
(
))
k
k
k
k
k
k
k
2
1
1
1
2
2 3
E* = ±
=±
T * ∧ N * ∧ (α *)′′′
T * ∧ N * ∧ (α *)′′′
(0,− (1 − λk )λk k ,0, (k − λ (k
1
2 3
1
2
1
(
2
2
(
2
(1 − λk1 ) 2 λ2 k 2 k 3 + (k1 − λ (k1 + k 2 )) 2 k 2 (k1 − λk12 − λk 2 + λk 3
2
=±
2
))
))
+ k 2 )) k 2 (k1 − λk12 − λk 2 + λk3 )
2
2
2
2
2
A
A
olarak alalım.
B* = ± N * ∧ T * ∧ E *
=
(
A λ2 k 2 − (1 − λk1 ) 2 (k1 − λ (k1 + k 2 )) 2 + λ2 k 2 k 3
2
2
2
2
(
2
)
T
(k1 − λ (k1 + k 2 ))(1 − λk1 )(k1 − λ (k1 + k 2 )) k 2 ( k1 − λk12 − λk 2 + λk 3 ) + λ2 k 2 k 3 (1 − λk1 )
2
+
)
λk 2 (k1 − λ (k1 2 + k 2 2 )) 2 k 2 (k1 − λk12 − λk 2 2 + λk 3 2 ) + λ3 k 2 3 k 3 2
2
2
2
2
2
A λ2 k 2 − (1 − λk1 ) 2 (k1 − λ ( k1 + k 2 )) 2 + λ2 k 2 k 3
2
k2 =
*
T * ∧ N * ∧ (α *)′′′ . (α * )′
2
(α * )′ .(α * )′′ − g ((α * )′, (α * )′′).(α * )′
2
2
2
2
2
2
B
81
=
k3 =
*
=
A
λ2 k 2 2 − (1 − λk1 ) 2 (k1 − λ (k12 + k 2 2 )) 2 + λ2 k 2 2 k 3 2
g ((α * ) (ıv ) , E )
T * ∧ N * ∧ (α *)′′′ . (α * )′
(
k 2 k 3 k1 − λk1 + λk 3
2
2
)
A λ2 k 2 − (1 − λk1 ) 2
olarak bulunur.
2
82
BÖLÜM 5
EĞRĐSEL UYGULAMALAR
Şimdi, bu çalışma için bazı geometrik uygulamalar sunacağız.
Problem 5.1. A(1, 0 , 0) noktasında bulunan bir parçacık
hareket edecek şekilde
{e1 , e2 , e3 , e4 }
∂
vektör alanında A* (−1, 0 , 0)
∂t
çatısına göre alındığında Frenet çatısını
inceleyelim.
α ( s ) = (cos s, sin s, 0, t ) eğrisi t > 0 spacelike olarak ele alındığında
α ′( s ) = ( − sin s, cos s, 0, t ′)
α ′(0) = (0,1, 0, t ′)
α ′′( s ) = (− cos s,− sin s, 0, t ′′)
α ′′(0) = (−1, 0, 0, t ′′)
α ′′′( s ) = (sin s,− cos s, 0, t ′′′)
α ′′′(0) = ( 0,−1, 0, t ′′′)
α ıv ( s ) = (cos s, sin s, 0, t ıv )
α ıv (0) = (1,0, 0, t ıv )
diferansiyellerini aldığımızda
T=
=
α′
α′
(0,1, 0, t ′)
1 + t′2
,
2
N=
α ′ .α ′′ − g (α ′, α ′′).α ′
2
α ′ .α ′′ − g (α ′, α ′′).α ′
(− (1 + t′ ),− t′t′′,0 , t′′)
2
=
=
− (1 + t ′2 ) 2 + t ′′2 (t ′2 + 1)
A
A
83
olsun;
T ∧ N ∧ α ′′′
T ∧ N ∧ α ′′′
E=±
− e1
e2
1
0
T ∧ N ∧ α ′′′ =
e3
− (1 + t ′2 )
A
1 + t′
− t ′t ′′
A
0
−1
=
2
e4
t′
0
1 + t ′2
t ′′
A
0
t ′′′
0
− (1 + t ′ 2 ) (t ′′′ + t ′)
B
A
E = ± (0, 0, − 1, 0)
B = ±N ∧ T ∧ E
− e1
=±
− (1 + t ′2 )
A
e2
e3
e4
− t ′t ′′
A
0
t ′′
A
1
0
1 + t ′2
0
0
0
−1
t′
1 + t ′2
0
− t ′′ (1 + t ′2 )
(t ′′, t ′, 0, −1)
=±
− (1 + t ′2 ) 2 + t ′′2 (t ′2 + 1)
2
k1 =
=
k2 =
α ′ .α ′′ − g (α ′, α ′′).α ′
α′
4
− (1 + t ′2 ) 2 + t ′′2 (t ′2 + 1)
(1 + t ′2 ) 2
T ∧ N ∧ α ′′′ . α ′
2
α ′ .α ′′ − g (α ′, α ′′).α ′
84
(t ′′′ + t ′)(1 + t′2 )
=
− (1 + t ′2 ) 2 + t ′′2 (t ′2 + 1)
k3 =
g (α ( ıv ) , E )
T ∧ N ∧ α ′′′ . α ′
t ( ıv ) − (1 + t ′2 ) 2 + t ′′2 (t ′2 + 1)
=
(t ′′′ + t ′)(1 + t ′2 )
olarak Frenet çatısı elde edilir. Aynı şekilde A* (−1, 0 , 0) noktasındaki duruma
baktığımızda
α ( s ) = (− cos s, sin s, 0, t ) eğrisi t > 0 spacelike olarak ele alındığında
α ′( s ) = (sin s, cos s, 0, t ′)
α ′(0) = (0,1, 0, t ′)
α ′′( s ) = (cos s,− sin s, 0, t ′′)
α ′′(0) = (1, 0, 0, t ′′)
α ′′′( s ) = (−sin s,− cos s, 0, t ′′′)
α ′′′(0) = ( 0,−1, 0, t ′′′)
α ıv ( s ) = (−cos s, sin s, 0, t ıv )
α ıv (0) = (1,0, 0, t ıv )
diferansiyellerini aldığımızda
α′
α′
T=
=
(0,1, 0, t ′)
1 + t′2
,
2
N=
α ′ .α ′′ − g (α ′, α ′′).α ′
2
α ′ .α ′′ − g (α ′, α ′′).α ′
((1 + t′ ),− t′t′′,0 , t′′)
2
=
=
− (1 + t ′2 ) 2 + t ′′2 (t ′2 + 1)
A
A
alırsak;
E=±
T ∧ N ∧ α ′′′
T ∧ N ∧ α ′′′
85
− e1
e2
1
0
T ∧ N ∧ α ′′′ =
1 + t ′2
− t ′t ′′
0
A
(1 + t ′2 )
A
−1
0
=
e3
0
0
e4
t′
1 + t ′2
t ′′
A
t ′′′
(1 + t ′ 2 ) (t ′′′ + t ′)
A
E = ± (0, 0, 1, 0)
B = ±N ∧ T ∧ E
− e1
=±
− (1 + t ′2 )
A
e2
e3
e4
− t ′t ′′
A
0
t ′′
A
1
0
1 + t ′2
0
0
0
1
t ′′ (1 + t ′2 )
(t ′′, t ′, 0, − 1)
=±
A
2
α ′ .α ′′ − g (α ′, α ′′).α ′
k1 =
α′
=
k2 =
=
4
A
(1 + t ′ 2 ) 2
T ∧ N ∧ α ′′′ . α ′
2
α ′ .α ′′ − g (α ′, α ′′).α ′
(t ′′′ + t ′)(1 + t ′ 2 )
A
2
t′
1 + t ′2
0
86
k3 =
=
g (α ( ıv ) , E )
T ∧ N ∧ α ′′′ . α ′
t ( ıv ) A
(t′′′ + t ′)(1 + t ′2 )
olarak bulduğumuz Frenet çatılarını karşılaştırdığımızda eğriliklerinin değişmediğini ve
teğetlerinin ayn, asal birinci bileşenlerinin ve binormallerinin ters işaretli olduğu
görülür.
Problem 5.2.
Şekil 5.1.a, kürenin kuzey kutup tarafında kalan yarısını temsil etmektedir. Eğer
eksenlerin bu birim küreyi deldikleri noktalar kendi simgeleriyle gösterilirse küre
yüzeyinde z, n, n noktaları bir küresel üçgen oluşturur.(Şekil 5.1.b) Toplam çekül
sapması (θ), onun azimutu ( aθ ), doğu-batı bileşeni (n) ve kuzey-güney bileşeni (ξ)
astronomik ve jeodezik verilerle aynı küresel üçgende toplanmış olurlar. Burada
koordinatları yazacak olursak;
x = q ⋅ cot g u ⋅ cos α
y = q ⋅ cot g u ⋅ sin α
z = tg α
dir. Bu durumda güneşin geldiği doğrultuda bulunan bir evin güneydoğu duvarı,
doğuyla 180 + 29 lik, güneybatı duvarı güneyle 29 lik açı yapar. O halde güneş açısı
119 ile 229 arasında yer alır. q boyundaki duvara dik çubuğun bulunduğu dikey saati
87
koordinat merkezi alınırsa y ekseni yere dik, x-ekseni batıya yönelik, ϕ bulunan yerin
enlemi, δ < ε deklinasyonu ve α çubuğun güneyle yaptığı açı olmak üzere,
(
)
y 2 sin 2 ϕ − sin 2 δ + x 2 (cos 2 ϕ ⋅sin 2 α − sin 2 δ ) + xy (sin α ⋅sin 2ϕ )
− xq sin 2α cos ϕ − yq cos α ⋅ sin 2ϕ + q 2 (cos 2 α ⋅ cos 2 ϕ − sin 2 δ ) = 0
2
hiperbolünü izler.
Dönenceler için δ = 0 alınırsa doğru
y sin ϕ + x sin α ⋅ cos α = q cos α ⋅ cos ϕ
elde edilir.
88
KAYNAKLAR
[1] AYDEMIR, I.,KURUOĞLU, N., “Time like Ruled Surfaces in the Minkowski
Space”, Int. J. Appl. Math. 10 (2002), no.2, 149915
[2] BEEM, J. K., EHRLICH, P. E., “Global Lorentzian Geometry”, Marcel Dekker
Inc. New York, 1981.
[3] CARMO, M. P., Riemann Geometry, Instituto de Matematica Pura e Aplicada,
1992.
[4] ÇÖKEN, A. C., ÇĐFTÇĐ, Ü., On Null Curves on Surfaces and Null Vectors in
Lorentz Space, SDÜ Fen Edb. Fak. (e-dergi)2(1), 111-116, 2007.
[5] GALLOT, S.,HULĐN, D.,LAFONTAĐNE, J., Riemannian Geometry, Universite
de Savoie, 1987.
[6] HACISALIHOGLU, H. H., Differential Geometry, Ankara University Faculty of
Science Press, 2000.
[7] ILARSLAN, K .and BOYACIOGLU, O. Position Vectors of A Space-like Wcurve in Minkowski Space E13 ,Bull. Korean Math. Soc. 44,429-438, 2007.
[8] LEE, J. M. , Riemann Manifolds An Introduction to Curvature, Department of
Mathematics, University of Washington Seattle, 1991
[9] O’NEILL, B. Semi-Riemannian Geometry with Applications to Relativity.
Academic Press, New York, 1983.
[10] RATCLIFFE, J. G., “Foundations of Hyperbolic Manifolds”, Department of
Mathematics, Vanderbilt University, 1994.
[11] THOMPSON, A. C. , Minkowski Geometry, Cambridge University Press, (1996)
[12] TOSUN, M., KURUOĞLU, N., “On Properties of Generalized Time like Ruled
Surfaces in the Minkowski Space ” Antarct. J. Math., 2 (2005), no. 2, 1739180.
[13] TURGUT, M. and YILMAZ, S. On the Differential Geometry of the curves in
Minkowski space-time I, Int. J. Contemp. Math. Sci. 3 (27), 1343-1349, 2008.
[14] TURGUT, M. And YILMAZ, S. On the Frenet Frame and A Characterization of
space-like Involute-Evolute Curve Couple in Minkowski Space-time, Int. Math. Forum,
3 (16), 793-803, 2008.
[15] TURGUT, M. OZYILMAZ, E. and YILMAZ, S. On the Differential Geometry of
the curves in Minkowski space-time II, Int. J. Comput. Math. Sci. 3 (2), 53-55, 2009.
[16] WALRAVE J. Curves and Surfaces in Minkowski Space. PhD Thesis , K.U.
Leuven, Faculty of Science, Leuven, 1995.
[17] TURGUT, A., 3-Boyutlu Minkowski Uzayında Spacelike ve Timelike Regle
Yüzeyler, PhD Thesis, 1995.
89
ÖZGEÇMĐŞ
Hatice TOZAK, 28.08.1985 tarihinde Denizli’de doğdu. Đlköğrenimini Denizli’deki
Namık Kemal Đlköğretim Okulunda tamamladı. Đlköğrenim ikinci kademesini Denizli
Türk Eğitim Vakfı Anadolu Lisesi’nde tamamladı. Ortaöğrenimini ise Denizli Erbakır
Fen Lisesi’nde bitirdi. Lisans eğitimini Ege Üniversitesi Fen Edebiyat Fakültesi
Matematik Bölümü’nde tamamladı. Şimdi ise Pamukkale Üniversitesi Fen Edebiyat
Fakültesi Matematik Anabilim Dalı’nda yüksek lisans eğitimine devam etmektedir.