belirli bir sıkma kuvveti etkisinde bisiklet fren kolu kuvvet analizinin
advertisement

tasarım
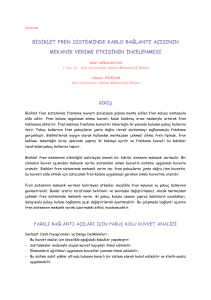
BELİRLİ BİR SIKMA KUVVETİ ETKİSİNDE BİSİKLET FREN
KOLU KUVVET ANALİZİNİN YAPILMASI
Nihat GEMALMAYAN, Hüseyin İNCEÇAM
Gazi Üniversitesi, Makina Mühendisliği Bölümü
GİRİŞ
ilk bisiklederde fren sistemi hiç kullanılmaz ya da
basit frenleme elemanları yeterli olurken günümüzde
yüksek hızlara ulaşabilen bisikletler için etkili fren
sistemlerinin tasarımı önemli olmaktadır. Tasarımda
güvenli fren mesafesi ve sürücü tarafından uygulanan
frenleme kuvveti birlikte etkilidir. Fren sistemini
oluşturan elemanların boyutlandırılması ve malzeme
seçimi elemanlara etkiyen kuvvetler etkisinde oluşan
gerilmeler gözönünde tutularak yapılır. Bu nedenle
kuvvet analizi fren sistemi tasarımında önemli bir
aşamadır. Bu çalışmada frenleme kuvvetinin sürücü
tarafından fren sistemine uygulandığı eleman olan fren
kolunun kuvvet analizi yapılacaktır.
BİSİKLET FREN KOLU KUVVET ANALİZİ
Serbest Cisim Diyagramları:
Bu kuvvet analizi için öncelikle aşağıdaki kabuller
yapılmıştır:
- Sürücü eli Şekil l ' d e gösterilen fren kolu
pozisyonunda 267 N sıkma kuvveti uygulamaktadır,
-
İvmelenmeler ihmal edilebilir,
Bu sistem sabit yükler altında bulunan, kararlı bir
sistem olarak kabul edilebilir ve statik analiz
uygulanabilir.
Şekil 1 fren kolunun komplesini göstermektedir. Bu
komple üç elemandan oluşur. Bunlar; 1- gidon 2- fren
kolu 3- kablo'dur. Fren kolu, bir vidayla fren kolu
taşıyıcısına ve kablo da kablo pimiyle fren koluna
bağlanır. Fren kablosu düşük sürtünmeli bir koruyucu
boru içinde frenleme kuvvetini tekerlekteki elemanlara
kadar iletir. Sürücünün eli, fren koluna ve gidon sapına
eşit ve ters yönlü kuvveder uygular. Bu kuvveder fren
kolunun kaldıraç oranı nedeniyle artarak kabloya iletilir.
Şekil 1 komplenin serbest cisim diyagramıdır ve tüm
kuvvet ve momender bu şekil üzerinde gösterilmiştir.
Burada ağırlık, uygulanan kuvvetler yanında ihmal
edilmiştir. Gidon sapının kesilmiş bölümünde x ve y
kuvvet bileşenleri ve bir moment oluşur. Bunlar pozitif
yönlü olarak gösterilmiştir, doğru yönleri hesaplamalar
sonucunda ortaya çıkacaktır. Değerleri bilinen kuvveder
doğru doğrultu ve yönlerinde gösterilmiştir.
Şekil 2'de komplenin üç elemanının serbest cisim
diyagramı ayrı ayrı çizilmiş, her elemana uygulanan
Şekil l. Fren Kolu Komplesi Serbest Cisim Diyagramı
Mııhendi'- ve MakıiM
t ılt 41 Sau 516
29
tasarım
kuvvetler ve momentler gösterilmiştir Yine ağırlıklar
ihmal edilmişti ı Fren koluna' ( 2 no'lu elemana ) uç
kuvvet etki emu kredır Bunlar, F b ,, F„ ve F,, Burada
kuvvetin ıkı kaıakterle gösterimi, 1 no'lu elemanın 2'} e
uyguladığı kuvvet ( F ) veya 2 no'lu elemana B'de
uygulanan km vetı (F ) ifade ermektedir Ikı karakterle
gosteıımde bıııncı karakter kuvvetin kaynağını, ikinci
kaıakteı k u w c t i n hangi elemana etkıdığını
göstermektedir C noktasını orijin olarak kabul eden
koordinat sisteminde, Rh2 ve R p vektörleri bu eleman
üzerine etkiyen F b , ve F f , kuvvetlerinin konum
vektörleridir
Fren kolu üzerindeki F
kuvvetinin büyüklüğü ve
yonu bilinmektedir F , kablo içinde oluşan kuvvettir
Bu kuvvetin yonu bılınıvor fakat bu) ukluğu bilinmiyor.
F
kuvveti 1 no'lu eleman tarafından 2'ye fren kolu
Şekil 2. Fren Kolu Komplesi Elemanları Serbest Cifim Diyagramları
Muhendii ve Makına
30
Cilt 44 Siyi SH
tasarım
vidası üzerinde uygulanmaktadır. Bu kuvvetin doğrultusu
ve büyüklüğü bilinmiyor. (1-2]
Denge Denklemleri:
Statik yük durumu 1 için;
Moment eşidığindeki vektör çarpımları açılırsa;
(2.12)
(2.1)
eşitliklerini kullanarak x ve y doğrultusundaki kuvvetlen
ve C noktası etrafındaki momentleri toplarsak aşağıdaki
eşıdikler elde edıiır. Bilinmeyen kuvvetler ve momender
başlangıç olarak pozitif yönde kabul edilmiştir.
Bu noktada tüm bilinmeyenlerin sayısı on dokuz. Şu
anda (2.2), (2.3), (2.5), (2.6), (2.7), (2.8), (2.9), (2.10), (2.12)
olmak üzere dokuz eşıdik var ve denklem sisteminin
çözülebilmesi için on eşidiğe daha ihoyaç var. Bunların
altı tanesi Newton'un üçüncü kanunundan elde edilebilir.
(2.13)
Moment eşitlığindeki vektör çarpımları uygulanan
kuvvetlerin C noktası etrafındaki momentlerini temsil
etmektedir. Bu vektör çarpımları açılarak moment eşitliği;
(2.5)
şeklinde yazılır. Bu durumda üç eşitlik ve dört
bilinmeyen var. Bu nedenle bir eşitliğe daha ihtiyaç var.
F 'nin doğrultusu biliniyor. Bu kullanılarak F c i
kuvvetinin bir bileşeni diğer bileşen ve kablonun bilinen
Angc2 açısı cinsinden ifade edilebilir;
İki eşitlik de el tarafından fren koluna ve gidon sapına
uygulanan kuvvetlerin eşit ve ters yönlü olduğu
kabulünden elde edilir.
(2.14)
Kalan iki eşitlik ise verilen geometriden ve sistem
üzerinde yapılan kabullerden elde edilebilir. F ^ ^
kuvvetinin doğrultusunun kablonun doğrultusuyla aynı
olduğu biliniyor. Kablo kuvveti F U W o ' n u n pozitif x
ekseniyle yapağı açının (Angcabl) değeri bilindiğine göre
buradan da bir eşidik elde edilebilir.
(2.6)
(2.15)
Şekil 2'de 3 no'lu eleman gösterilmiştir ve 1 no'lu
elemanda bulunan delikten geçmektedir. 1 vë 3 no'lu
parçaların temas noktası sürtünmesiz olarak kabul
edilebilir. Ayrıca F , F c 3 , F k a b | ) kuvvetlerinin aynı
noktadan geçtiği ve moment oluşturmadığı kabul edilirse;
(2.7)
(2.8)
Şekil 2'deki 1 no'lu elemana kuvvet ve momender
etkimektedir. Buradan üç eşidik daha elde edilir;
(2.9)
(2.10)
(2.11)
M ıİKiıuıs ve MaKina
Sürtünme olmadığı kabulüne dayanarak F kuvvetinin,
tel ile 1 no'lu parçadaki deliğin temas noktasına dik olduğu
kabul edilebilir. F„ kuvvetinin pozitif x ekseniyle yapağı
Ang31 açısının değeri bilindiğine göre;
(2.16)
Böylece (2.13), (2.14), (2.15) ve (2.16) sederindeki on
denklemle birlikte on dokuz denklem elde edildi. [1-2]
Denge Denklemlerinin Çözümü:
Elde edilen on dokuz eşidik yardımıyla on dokuz
bilinmeyen bulunabilir.- Elde edilen bu denklem sistemi
matris şekline sokularak bir bilgisayar programı yardımıyla
çözülebilir. Burada bu denklem sistemini çözmek için Ex-
Cilt 44 S A M 5 1 b
31
tasarım
cel programı kullanılmıştır. Bunun için öncelikle elde edilen
denklem sistemi matris çarpımı-şeklinde ifade edilir. [A]
katsayılar matrisi, {X} bilinmeyenler matrisi, {B} sabider
matrisi olmak üzere denklem sistemi:
(2.18)
şeklinde bilinmeyenler matrisi b u l u n m u ş olur.
Katsayılar matrisi [A] Tablo l'de, katsayılar matrisinin
(2.17)
[A]x{X} = {B}
1
tersi [A]" Tablo 2'de, sabitler matrisi {B} ile
bilinmeyenler matrisi {X} Tablo 3'te gösterilmiştir.
1
eşitliğiyle ifade edilebilir. Bu eşitliğin iki tarafı [A]"
matrisiyle çarpılırsa:
[Aj =
l
0
0
0
-0,18
0
0
0
0
1
0
0
1
I
0
0
0
0
0
0
1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
28
0
0
0
0
0
0
0
-3
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
14
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
1
0
0
0
0
0
0
1
65
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
[2-3]
0
0
0
0
0
0
0
-0,27
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
1
3
0
0
0
0
0
0
1
0
0
0
0
-49
0
-35
0
0
0
0
0
0
0
0
-30
0
0
1
0
1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1 0,268
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
-33
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
Tablo 1. Katsayılar Matrisi [A]
1,019
0,18
-0,11
-0.02
-0,04
-0,01
0,109
0
0
0
1,019
0
0
0
-0,02 0,109 0,036 -0,11
0
0
-0,18 1,019 0,006 -1,02
0
0
-1,02 0,109 0,036 -0,11
-0,18 0,019 0,006 -1,02
0
0
-0
0,023
-0 -0,25 0,067 -0,25
-0,09 0,009 0,003 0,924 -0,25 0,933
0,996 -0,11 -0,04 0,357 0,933 0,25
[A]-l = 0,267 -0,03 -0,01 0,0% 0,25 0,067
0 8E-18 3E-16
6E-17
-0
-0
0 3E-18
1E-17
-0 1E-17
0
-0,02 0,003 8E-04 0,247 -0,07 0,25
0,087 -0,01
0,019 -0,11
0,18 -1.02
0,004 0,107
-0,27 1,029
-0 -0,92 0,25 -0,93
-0,04 0,109
0
0
-0,01 1,019
0
0
0,036 -0,36 0,067 -0,25
0,01
-0,1 -0,25 0,933
-6,86 33,52 -0,83 -23,1 -2,78 10,38
0
0
0
0
0
0
0
0
0
0
0
0
0 2E-17
0 1E-16
0
-0
0
-0
0
0
0
-0
0
-0
0
0
-0
0
0
0
1 2E-17
0
1
0
33
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
-0,07
0,25
-0,93
-0,25
0 2E-16
0
-0
0 0,067
0 -0,25
0
0
0
0
0 -0,07
0 0,25
1 2,782
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
3E-17
0
0
0
0,25 -0,93
-0,93 -0,25
-0,25 0,933
0,933 0,25
8E-16 5E-16
0
-0
-0,25 0,933
0
0
0
0
0
0
0
I
0
0
0
0
0
0
0,25
0
-0 0,933 0,25
0
0
-0,93 4E-17
0 0,25 0,067 1E-16
-0
0 7E-17 -0,93 -0,25
-0,25
0
0
-0
-0,07
0 -0,25 -0,07
-0 1E-16
0 5E-16 2E-16 8E-16
1
8E-I6
-0
0
0
0
0 5E-17
-0
1
0 6E-17 0,067 -0,25
0
-0,25
0
-0
-0 -0,25 0,933
-0 1E-16 0,933 0,25
0,933
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
-1
-0 -0,07 0,25
-1
0,25
0 0,25 -0,93
-1 0,25 -0,93 9E-17
-0,93 9E-17
-1 -0,93 -0,25
-10,4
30
-36 2,782 -10,4
-14
-98 -10.4 46,22
Tablo 2. Katsayılar Matrisinin Tersi [A] '
Mühendis ve Makııid
32
Lı't 44 Sayı b l b
tasarım
Tablo 3. .Sahiller Matrisi IB} ve Bilinmeyenler Matrisi {X}
0
267
16020
0
-612,318
-107,968
612,318
374,9682
0
0
612,318
107,9682
0
-14,0255
52,34381
-598,293
-160,312
0
0
0
{B} =
{X} =
0
0
0
-1.4E-13
267
14,02548
-52,3438
0
0
-612,318
0
267
0
0
-374,968
598,2925
160,312
-30454,1
SONUÇ
Tablo 4'te konum vektörleri, açılar ve değeri bilinen
kuvvederin değerleri verilmiştir. Tablo 5'te bilinmeyen
kuwederin ve momentin hesaplanan değerleri verilmiştir.
Görüldüğü gibi F. .. = -598 N, F. .. = -160 N
bulunmuştur. Buradan F f a b | o = 620 N olarak bulunur.
Hesaplanan kablo kuvveti tekerleklerdeki frenleme
elemanlarına kadar iletildiğinden bu elemanlardaki kuvvet
analizi için kullanılır.
İncelenen sistem iki boyutlu statik yükleme
durumunda olduğundan ve yapılan kabuller nedeniyle
oldukça basite indirgenerek çözülmüştür. Ancak bu
çalışmanın, ivmelerin de hesaba katılacağı dinamik yükler
etkisindeki sistemlerin ve üç boyutlu problemlerin
çözümü için yol gösterici olduğu düşünülmektedir.
Elde edilen on dokuz denklemde bilinmeyenlerin biri
diğeri cinsinden yazılarak ve yerine koyma yöntemiyle
bilinmeyenlerden bir kısmı çözülebilirdi. Ancak bu
durumda işlem sayısı artacağından denklem sistemi matris
tersi yöntemiyle çözülmüştür. Bu yöntem çok bilinmeyenli
denklem sistemlerinin çözümüne imkan sağladığından
özellikle bunlann çözümünde tercih edilebilir.
Tablo 4. Fren Kolu Elemanlarının Ölçüleri
Değişken
Değer
Birim
0
Fb2x
Fb2y
Angc2
N
Açıklama
Uygulanan kuvvetler
El kuvveti bileşeni
-267
190
N
Derece
El kuvveti bileşeni
Kablo kuvveti Fc2'nin açısı
Angl3
195
105
Derece
Derece
Fkablo'nun açısı
F13 kuvvetinin açısı
Rc2x
Rc2y
-25
0
mm
mm
Konum vektörü Rc2 'nin bileşeni
Konum vektörü Rc2 'nin bileşeni
R12x
-3
mm
Konum vektörü R12 'nin bileşeni
R12y
-28
mm
Konum vektörü R12 'nin bileşeni
mm
/ no'lu elemanın ölçüleri
Konum vektörü R21'in bileşeni
Angcabl
2 no'lu elemanın ölçüleri
3
30
R21x
R21y
Konum vektörü R21'in bileşeni
Rblx
65
mm
mm
Rbly
R31x
-14
-35
mm
mm
Konum vektörü Rbl'in bileşeni
Konum vektörü R31'in bileşeni
R31y
Rpx
49
-33
mm
mm
Konum vektörü R3 l'in bileşeni
Konum vektörü Rp'nin bileşeni
0
mm
Konum vektörü Rp'nin bileşeni
Rpy
Konum vektörü Rbl'in bileşeni
33
Muhendib ve Mtıkına
Cilt 44 bsvı 516
tasarım
Tablo S. Fıcıı Kolu Kuvvet Analizi Sonuçları
Değişken
Değer
Birim
Açıklama
2 no'lu elemana etkiyen kuvvetler
Fc2x
-612
N
Kablonun 2. elemana x doğrultusundaki etkisi
Fc2y
-107
N
Kablonun 2. elemana y doğrultusundaki etkisi
F12x
612
N
1. elemanın 2.'ye x doğrultusundaki etkisi
F12y
374
N
1. elemanın 2.'ye y doğrultusundaki etkisi
3 no'lu elemana etkiyen kuvvetler
Fc3x
612
N
Kablonun 3. elemana x doğrultusundaki etkisi
Fc3y
107
N
Kablonun 3. elemana y doğrultusundaki etkisi
F13x
-14
N
1. elemanın 3.'ye x doğrultusundaki etkisi
F13y
52
N
1. elemanın 3.'ye y doğrultusundaki etkisi
Fkablox
-598
N
x doğrultusundaki kablo kuvveti
Fkabloy
-160
N
y doğrultusundaki kablo kuvveti
/ no'lu elemana etkiyen kuvvetler
Fblx
0
N
Elin 1. elemana x doğrultusundaki kuvveti
Fbly
267
N
Elin 1. elemana y doğrultusundaki kuvveti
F31x
14
N
3. elemanın l.'ye x doğrultusundaki etkisi
F31y
-52
N
3. elemanın l.'ye y doğrultusundaki etkisi
F21x
-612
N
2. elemanın l.'ye x doğrultusundaki etkisi
F21y
-374
N
2. elemanın l.'ye y doğrultusundaki etkisi
Px
598
N
Gidon sapında x doğrultusundaki tepki kuvveti
Py
160
N
Gidon sapında y doğrultusundaki tepki kuvveti
Mh
-30
Nm
Gidon sapındaki tepki momenti
KAYNAKÇA
1.
Hibbeler, R. C, "Engineering Mechanics Statics and Dy­
2.
Norton, Robert L., "Machine Design An Integrated Ap­
namics", 7"' hdıtıon, Pıentıce-Hall, New Jersey, 1995
proach", PicntiCL-Hall, New Jersev, 1998
3.
Chapra, S. C. and R. P. Canalc, "Numerical Methods for
Engineers''^" 1 Edition, McGraw-Hill, New York, 1998
Mühendis ve Makina
34
Cilt 44 Sayı 51t>