T.C.
KARADENİZ TEKNİK ÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
MUTFAK HAVALANDIRMA SİSTEMİ
243414-Ozan Emre YILMAZER
243432-Mehmet Mücahit YAĞCI
210370-Hakan YAZICI
Yrd. Doç. Dr. Fatih Mehmet NUROĞLU
Mayıs, 2014
TRABZON
T.C.
KARADENİZ TEKNİK ÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
MUTFAK HAVALANDIRMA SİSTEMİ
243414-Ozan Emre YILMAZER
243432-Mehmet Mücahit YAĞCI
210370-Hakan YAZICI
Yrd. Doç. Dr. Fatih Mehmet NUROĞLU
Mayıs, 2014
TRABZON
LİSANS BİTİRME PROJESİ ONAY FORMU
Ozan Emre YILMAZER, Hakan
YAZICI ve Mehmet Mücahit
YAĞCI tarafından
Yrd. Doç. Dr. FATİH MEHMET NUROĞLU yönetiminde hazırlanan “ Mutfak
Havalandırma Sistemi” başlıklı lisans bitirme projesi tarafımızdan incelenmiş, kapsamı ve
niteliği açısından bir Lisans Bitirme Projesi olarak kabul edilmiştir.
Danışman
: Yrd. Doç. Dr. Fatih Mehmet NUROĞLU
Jüri Üyesi 1
: Prof. Dr. Adem Sefa AKPINAR
Jüri Üyesi 2
: Doç. Dr. Halil İbrahim OKUMUŞ
Bölüm Başkanı
: Prof. Dr. İsmail Hakkı ALTAŞ
ÖNSÖZ
Bu projenin hazırlanmasında emeği geçenlere, projenin son halini almasında yol
gösterici olan kıymetli hocamız Sayın Yrd. Doç. Dr. FATİH MEHMET NUROĞLU‘na
şükranlarımızı sunmak istiyoruz. Ayrıca bu çalışmayı destekleyen Karadeniz Teknik
Üniversitesi Rektörlüğü’ne, Mühendislik Fakültesi Dekanlığına, Elektrik-Elektronik
Mühendisliği Bölüm Başkanlığına, Elektrik-Elektronik Müh. Sayın Özkan YAZGAN’ a
içten teşekkürlerimizi sunarız.
Her şeyden öte, eğitimimiz süresince bizlerden maddi ve manevi desteklerini
esirgemeyen ailelerimize ve bizlere hayatlarıyla örnek olan tüm hocalarımıza saygı ve
sevgilerimizi sunarız.
Mayıs,2014
Ozan Emre YILMAZER
Mehmet Mücahit YAĞCI
Hakan YAZICI
i
İÇİNDEKİLER
LİSANS BİTİRME PROJESİ ONAY FORMU.........................................................................................İ
ÖNSÖZ .......................................................................................................................................................İ
İÇİNDEKİLER ........................................................................................................................................ İİ
SEMBOLLER KISALTMALAR ............................................................................................................ İV
ÖZET ........................................................................................................................................................ V
SUMMARY ............................................................................................................................................. Vİ
GİRİŞ......................................................................................................................................................... 1
2. TEORİK BİLGİ..................................................................................................................................... 4
2.1. TEK FAZLI ASENKRON MOTORLAR ............................................................................................................. 4
2.1.1. TEK FAZLI ASENKRON MOTORUN EŞDEĞER DEVRESİ ................................................................................... 5
2.1.2. TEK FAZLI ASENKRON MOTORLARA YOL VERME ......................................................................................... 7
2.1.3.YARDIMCI SARGI KULLANMAK ................................................................................................................ 8
2.1.4. KONDANSATÖR YOL VERMELİ MOTORLAR ................................................................................................ 9
2.1.5. SÜREKLİ KONDANSATÖR MOTORLAR ..................................................................................................... 11
2.1.6. ÇİFT KONDANSATÖRLÜ MOTORLAR ...................................................................................................... 12
2.1.7. GÖLGE KUTUPLU MOTOR................................................................................................................... 13
2.1.8. ÜNİVERSAL MOTOR .......................................................................................................................... 15
2.1.9. DEĞERLENDİRME .............................................................................................................................. 15
2.2. TEK FAZLI AA KIYICI ............................................................................................................................. 16
2.2.1. TEK FAZLI TEMEL AA KIYICI................................................................................................................. 16
2.2.2. BİR GÜÇ ELEMANIN AKIM VE GERİLİMİ .................................................................................................. 18
3. TASARIM............................................................................................................................................ 20
3.1. SIFIR GEÇİŞ DEVRESİ ............................................................................................................................ 21
3.2. LM7805 ENTEGRESİ İLE GERİLİM REGÜLASYONU ....................................................................................... 21
3.3. PIC 16F877A MİKROİŞLEMCİSİ ............................................................................................................. 22
3.4. OPTOKUPLÖR ..................................................................................................................................... 22
3.5. TRİYAK ............................................................................................................................................. 23
3.6. SIVI KRİSTAL EKRAN(LCD) ..................................................................................................................... 23
3.7. GERİLİM DEĞİŞİMİ ............................................................................................................................... 24
4. DENEYSEL ÇALIŞMALAR .............................................................................................................. 26
4.1. TETİKLEME SİNYALLERİ .......................................................................................................................... 26
4.2. YÜKE UYGULANAN GERİLİM ................................................................................................................... 28
4.3. GERİLİMİN ŞEKLİ ................................................................................................................................. 29
ii
4.4. YÜK AKIMI ........................................................................................................................................ 31
4.5. MOTOR DEVRİ .................................................................................................................................... 32
4.6. MOTOR GÜCÜ VE MOMENTİ ................................................................................................................. 32
4.7. HAVA DEBİSİNİN DEĞİŞİMİ ..................................................................................................................... 33
5. SONUÇLAR ........................................................................................................................................ 34
6. DEĞERLENDİRME VE YORUM ..................................................................................................... 36
KAYNAKLAR......................................................................................................................................... 37
EKLER .................................................................................................................................................... 38
EK-1. IEEE ETİK KURALLARI ......................................................................................................................... 38
EK-2. DİSİPLİNLER ARASI ÇALIŞMA ................................................................................................................ 40
EK-3. MALİYET TABLOSU ............................................................................................................................ 41
EK-4. ÇALIŞMA TAKVİMİ ............................................................................................................................. 43
EK-5. DEVRE ŞEMASI ................................................................................................................................. 44
EK-6. BASKI DEVRE ŞEMASI ......................................................................................................................... 45
EK-7. MİKROİŞLEMCİ KODLARI ..................................................................................................................... 46
EK-8. STANDART VE KISITLAR FORMU .................................................................................................... 55
ÖZGEÇMİŞ............................................................................................................................................. 57
iii
SEMBOLLER KISALTMALAR
n:Dönme hızı (d/d)
ns:Senkron hız (d/d)
Sp: Pozitif bileşenin oluşturduğu kayma
Sn:Negatif bileşenin oluşturduğu kayma
Zpe:Pozitif bileşene ait empedans
Zne:Negatif bileşene ait empedans
R1:Stator sargı direnci
R2:Rotorun statora indirgenmiş direnci
X1: Stator sargı reaktansı
X2: Rotorun statora indirgenmiş reaktansı
Xm:Mıknatıslanma reaktansı
Pi: Net hava aralığı gücü
Pd: Mekanik enerjiye dönüştürülen güç
Mi: Hava aralığında indüklenen moment
SCR: Tristör
α: Tetikleme açısı
γ: Sönme açısı
Vg: Giriş gerilimi
Vç: Çıkış gerilimi
VDRM: Tekrarlı dayanma gerilimi
ITAV: Akımın ortalama değeri
ITEF: Akımın etkin değeri
iv
ÖZET
Bu projede bir mutfak havalandırma sistemi, mikroişlemci yardımıyla kontrol edilmiş ve
gerçekleştirilmiştir.
İlk olarak, projede kullanılacak tek fazlı motor için araştırma yapılmış, kullanım yerleri ve
türleri hakkında bilgi verilmiştir. Projede üniversal motor kullanılmasına karar verilmiştir.
İkinci bölümde motor kontrolü için bir AA kıyıcı tasarlanmıştır. AA kıyıcıda triyak
kullanılmış, triyakın farklı zamanlarda, mikroişlemci yardımıyla, tetiklenmesiyle elde
edilecek farklı gerilim değerleri hesaplanmıştır.
Üçüncü bölümde AA kıyıcı kontrolü için yazılım geliştirilmiş, deneysel olarak gerilim
değişimi, motor hızının değişimi incelenmiştir. Motor hızının değişimiyle, mutfak
havalandırma sistemindeki motorun yaptığı hava emişinin değişimi gözlenmiştir.
Anahtar Kelimeler: Üniversal Motor, AA(Alternatif akım) kıyıcı, Motor Hız Kontrolü
v
SUMMARY
In this project, a kitchen ventilation system is demonstrated and controlled via
microprocessors.
Firstly; single-phase motors, which were used in the project, are studied. Necessary
information about variations of single-phase motors and their area of usage is given. It is
decided that a universal motor is used in the project.
In second stage, an AC chopper is designed for motor control. A triac is used in the AC
chopper. Voltagerates, which area cquired by triggering the triac via microprocessors at
different times, are calculated.
In third stage, a software is developed for AC chopper control. Voltage and motor speed
variations are examined experimentally. The air suction shifts, which are produced by the
motor in the kitchen ventilation system, are observed in paralel with the change of motor
speed
vi
GİRİŞ
Kapalı mekanlarda insanların çok olması, endüstriyel uygulamalarda ise bazı uygulamalar
yüzünden kirlenen hava sürekli ve geçici olarak yenilenmek zorundadır.
Ev, lokanta mutfaklarında pişirilen yemekler ortama su buharı ve hoş olmayan kokular
bırakır. Bazı mutfaklarda buna ek olarak kullanılan ızgaralardan ötürü dumanda bırakılır.
Ortamdaki havanın dışarı atılması ve yerine taze havanın getirilmesi gerekir.
Havalandırma sistemlerinin düzgün bir şekilde çalışabilmesi bazı temel koşullara
bağlıdır.
1. Ortama gerekli taze hava girişinin mutlaka yapılması,
2. Ortamda rahatsızlık yaratacak hava akımının (ceryanın) olmaması,
3. Havalandırma sisteminin mahal havasını üniform bir şekilde dağıtıp
toplanması
4. Vantilatörlü tesislerde sessiz bir çalışmanın sağlanması gibi hususlardır. [1]
Mutfaklarda genellikle Şekil 1’ de ki gibi tek kanallı havalandırma sistemi
kullanılmaktadır.
Şekil 1. Tek kanallı havalandırma sistemi
Ev, lokanta mutfaklarında havalandırma sistemleri ortamda bulunan kirli havanın
miktarına göre farklı havalandırma kademelerine ihtiyaç duyarlar. Böylece ortamdaki pis
hava fazlaysa havalandırma sistemi tam randumanla, eğer pis hava az ise düşük
randumanla çalıştırılır. Havalandırma sisteminin kontrolü, sistemdeki motorun kontrolü ile
sağlanır. Ev,lokanta havalandırma sistemlerinde genellikle tek fazlı asenkron motorlar
kullanılır.
Tek fazlı asenkron motorlar sanayide az kullanılmalarına rağmen küçük güç gerektiren
uygulamalarda sıklıkla kullanılmaktadır. Ev, büro, atölye gibi tek fazın ve küçük güç
ihtiyacının olduğu yerlerde tek fazlı asenkron motorlar kullanılırlar. Bundan dolayı en sık
karşılaşılan motorlardır.[2]
Tek fazlı asenkron motorlar; elektrik süpürgesi, çamaşır makinesi, elektrikli testere, fan
gibi küçük güç gerektiren makinelerde kullanılırlar. Bu makinalar ihtiyaca göre farklı
devirlerde çalıştırılmak istenir. Tek fazlı motorların devirlerinde değişim yapabilmek için
çeşitli yöntemler kullanılır. Devir sayısı kontrol yöntemleri sırasıyla frekans değiştirme,
kutup sayısı değiştirme ve statora uygulanan gerilimi değiştirme olarak sıralanabilir.
Frekans değiştirme doğrultucu ve evirici masraflarının motor maliyetinden fazla olması,
kutup sayısı değiştirme motor ebatlarının büyümesi dolayısıyla tercih edilmez.[3]
Statora uygulanan gerilimin değiştirilmesi tercih edilen ve en sık kullanılan yöntemdir.
Statora uygulanan gerilim, alternatif akım kıyıcısı veya stator sargısına seri direnç
bağlanarak değiştirilebilir. Seri direnç bağlanarak stator gerilimin değiştirilme uygulaması,
fazla enerji sarfiyatına yol açacağı için tercih edilmemiştir. Bu çalışmada statora uygulanan
gerilimin değiştirilmesi alternatif akım kıyıcısı ile yapılacaktır.
Projede; alternatif akım kıyıcısında, triyak kullanılarak gerilim kıyımı gerçekleştirilecektir.
Güç elektroniği elemanı olan triyakın iletime geçebilmesi için kapı darbesi gereklidir.
Triyaka kapı darbesi mikroişlemci kullanılarak verilecektir. Değişik zaman aralıklarında
verilen kapı darbeleriyle, triyaklı AC kıyıcıda değişik gerilimler üretilir. Motora seri bağlı
olan triyakla; motora uygulanan gerilim değeri böylece değiştirilmiş olur. Değişen motor
gerilimiyle, motora aktarılan güç değeri azalacağı için motorun devri değiştirilir.
2
Motor devrinin azalmasıyla birlikte, havalandırma sistemi için hava akış hızı değişecektir.
Hava akış hızının değişmesiyle, hava akışının gerçekleştirileceği borunun çapına bağlı
olarak havanın debisi değişecektir. Mutfaktaki pis havanın oranına göre, motor farklı hız
kademelerinde çalıştırılıp, ortamdaki havanın tahliyesi kolaylaşacaktır.
3
2. TEORİK BİLGİ
Tek fazlı asenkron motorlar küçük güçlerde üretilirler ve alternatif akım şebekelerinde
kullanılırlar. Güçleri 0.025-2.2 kW arasında değişir. Tek fazlı asenkron motorların yapısı
üç fazlı asenkron motorların yapısına benzer. Üç fazlı asenkron motorlarda olduğu gibi, tek
fazlı asenkron motorun yapısı; stator sargısı, rotor, gövde ve kapaklardan oluşur. Bu
motorlar stator sargıları aralarında 90 derece faz farkı bulunan ana ve yardımcı sargıdan
oluşur. Rotorları ise sincap kafeslidir.
2.1. Tek Fazlı Asenkron Motorlar
Tek fazlı asenkron motorlarda akımların faz sayısı ve sargısın bir fazlı olmasından ötürü
dönen manyetik alan oluşmaz. Dönen manyetik alan oluşmadığı için motor kendiliğinden
yol alamaz. Sargıya uygulanan gerilim ile değeri sadece, zamanla ve akımın genliğine
bağlı olarak değişen alternatif bir alan meydana gelir. Stator etrafında bulunan manyetik
alan pozitif ve negatif maksimum değer arasında titreşir. Şekil 2’de görüldüğü gibi pozitif
moment bileşeni ve negatif moment bileşenin toplamları toplam momenti oluşturmaktadır.
Hızın sıfır olduğu noktada toplam moment değeri de sıfırdır. Toplam moment değeri sıfır
olduğu için motor yol alamaz ve kısa devre durumunda çalışır. Rotorun dönmesi; mevcut
kuvvet dengesinin dışarıdan bir kuvvetle bozulması ile gerçekleşir ve rotor kuvvetin
uygulandığı yönde dönmeye başlar. [3]
Şekil 2. Birbirine zıt yönde dönen iki döner
alan ve toplam moment
4
2.1.1. Tek Fazlı Asenkron Motorun Eşdeğer Devresi
Tek fazlı asenkron motorun durma koşulundaki eşdeğer devresi Şekil 3’de ki gibidir. Bu
eşdeğer devrede verilen R1 ve X1 değerleri stator sargısının direnç ve reaktansı, R2 ve X2
ise rotorun statora indirgenmiş direnç ve reaktansıdır. Rotor hareketsizken genlikleri eşit
olan pozitif ve negatif dönen alanlar, rotor devresinde eşit miktarlarda omik ve reaktif
gerilim düşümü meydana getirirler. Pozitif ve negatif bileşenlerin akımları kendilerine ait
devrelerden akar. Bu nedenle rotor eşdeğer devresi Şekil 4’de verildiği gibi iki ayrı parçaya
bölünür. [4]
Şekil 3. Tek fazlı asenkron motor eşdeğer devresi
Rotorun n hızı döndüğünü varsayalım. Bu durumda pozitif ve negatif dönen alanlar için
kayma miktarları farklı olur. Pozitif döner alan bileşeninin yönünde n hızı ile dönme
gerçekleştiğinde kayma 1.1’ de verildiği gibi olur.
=
−
(1)
Negatif döner alan bileşenine göre;pozitif döner alan bileşenine göre n hızı ile dönen
rotorun dönme hızı ters olduğundan, hız negatif değer alır. Negatif bileşene göre devir
sayısı 1.2’ de verildiği gibi olur.
− (− ) =
+
Negatif kayma, n devir sayısı yerine
(2)
= (1 − )
5
yazılırsa 1.3’ de verildiği gibi olur.
=2−
(3)
Şekil 4’de ki paralel bağlı pozitif ve negatif bileşenlere ait rotor devrelerinin empedansları
Zpe ve Zne olarak tanımlanır. Bu empedanslar yardımıyla motor giriş akımı rahat bir şekilde
bulunur.
Şekil 4. Pozit if ve negat if tam eşdeğer devre
Öncelikle pozitif bileşen için Zpe empedansı bulunur.
=
( ⁄ +
( ⁄ +
)(
)+
)
(4)
Negatif bileşen için Zneempedansı aynı şekilde bulunur.
=
( ⁄(2 − ) +
( ⁄(2 − ) +
)(
)+
)
Motor sargılarından akan akım
(5)
ve
cinsinden aşağıdaki gibi olur.
(6)
+
+ 0.5
+ 0.5
6
Stator ile rotor arasındaki hava aralığından geçen güç, rotora aktarılan gücü verir. Bu güç
pozitif ve negatif bileşenlerden oluşur. Dolayısıyla net hava aralığı gücü 1.7’ da ki gibi
olur.
=
−
(7)
2−
Hava aralığında indüklenen moment ise aşağıdaki denklem yardımıyla bulunur.
=
(8)
İ
Motorda elektrik enerjisinden mekanik enerjiye dönüştürülen güç ise 1.9' da ki gibi olur.
=
×
(9)
Motorda oluşan bakır kayıpları ve vantilasyon kayıpları
değerinden çıkarıldıktan sonra
milden elde edilen çıkış momenti bulunur.[4]
2.1.2. Tek Fazlı Asenkron Motorlara Yol Verme
Tek fazlı asenkron motorların kendi kendine yol alamadığı motorun çalışma ilkesinin
anlatıldığı bölümde açıklanmıştı. Motora etki eden pozitif ve negatif döner alanların
toplamının sıfırdan farklı bir değere ulaşması ile motora yol verilir. Bunun için genlikleri
eşit ve aralarında
kadar açı farkı bulunan bu iki vektörün, ya genliklerinin ya açılarının
ya da her ikisinin birden eşitlik durumundan çıkarılması gerekir. Aşağıda incelenecek
bütün yol verme metotlarında, iki döner alandan birini diğerinden daha güçlü yapma ile
motora yol verilmesi anlatılacaktır.
7
2.1.3.Yardımcı Sargı Kullanmak
Statora aralarında 90 derece faz farkı olarak yerleştirilen ana sargı ve yardımcı sargı
Şekil 5’ de gösterilmiştir.
Şekil 5. Yardımcı sargılı asenkron motor [2]
Yardımcı sargı ana sargıya göre daha ince kesitli iletkenlerden yapılarak; yardımcı sargı
direncinin ve reaktasının, ana sargının sargı direnci ve reaktansından büyük olması
sağlanır. Böylece yardımcı sargı akımının, ana sargı akımından geri kalması sağlanır.
Yardımcı sargıdan geçen akım ana sargıya göre geri fazda olduğu için pozitif ve negatif
vektörlerin dengesi bozulur. Ortaya çıkan moment ile motor yol alır ve Şekil 6’ da
görüldüğü gibi hızlanmaya başlar. Merkezkaç kuvveti prensibine göre çalışan anahtar,
rotor hareketiyle merkezkaç kuvveti arttığı için devrilme momentine yakın bir değerde
kontaklarını açar. Böylece yardımcı sargı devreden çıkarılır.
8
Şekil 6. Yardımcı sargılı tek fazlı motorun hız
moment eğrisi [2]
Şekil 6’da görüldüğü gibi ilk etapta elde edilen moment tam yük momentinin %150’ si
kadarken, motor hızı arttıkça momentte artar. Moment tam tük momentinin %250’ sine
kadar ulaşabilmektedir. Yardımcı sargı devreden çıktıktan sonra, motor momenti ile yük
için gerekli moment dengelendiğinde motor karalı duruma ulaşır. Bu tip motorlar çok sık
başlama-durma gerektirmeyen, yol alma momenti düşük olan yükler için uygundur. El
aletleri, kurutucu, aspiratör gibi birçok kullanım yerleri mevcuttur. [2]
2.1.4. Kondansatör Yol Vermeli Motorlar
Birbirine zıt dönen iki alan vektörünün aralarındaki açıyı 90 derece yapmanın bir diğer
yolu; Şekil 7’ de görüldüğü gibi yardımcı sargıya seri olarak kondansatör bağlamaktır.
9
Şekil 7. Kondansatör yol vermeli motor [2]
Kondansatör sığası yeterli büyüklükte seçilirse, yardımcı sargının bulunduğu devrenin
empedansı azalır ve sargıdan geçen akım artar. Yerleştirmeden dolayı aralarında 90 derece
açı farkı olan iki alan vektörü arasındaki açı kondansatör sayesinde sıfır yapılır ve iki
vektör çakışırlar. Şekil 8’ de görüldüğü gibi yol verme momenti aşırı derecede büyür.
Rotor belirli bir hıza ulaşınca merkezkaç anahtar ile yardımcı sargı ve kondansatör devre
dışı bırakılır.
Şekil 8. Kondansatör yol vermeli motorun moment eğrisi [2]
10
Bu tip motorlar yüksek başlatma momenti gerektiren kompresörler, büyük vantilatörler ve
yük altında yol alması istenen uygulamalarda kullanılırlar.
2.1.5. Sürekli Kondansatör Motorlar
Bu tip motorlarda; Şekil 9’ da görüldüğü gibi kondansatör sürekli devrededir. Kondansatör
motora yol verme dışında güç faktörünü iyileştirir, yani kompanzasyon gerçekleştirir.
Şekil 9. Sürekli kondansatörlü motor [2]
Kondansatör değeri en iyi çalışma ve yol alma şartlarına uyum sağlayacak şekilde
seçilmeli ve sığası küçük olmalıdır. Bu sebeple Şekil 10’ da görüldüğü gibi bu motorların
başlangıç momentleri düşüktür. Ancak bu motorlar yüksek momente sahiptirler.
11
Şekil 10. Sürekli kondansatörlü motorun hız
moment eğrisi [2]
2.1.6. Çift Kondansatörlü Motorlar
Çift kondansatörlü bir motorun eş değer devresi Şekil 11’de gösterilmiştir. Yüksek
kapasite değerine sahip yol verme kondansatörü ile, kalkış anında kalkınma momenti
yüksek tutulur. Yol alma işlemi bittikten sonra merkezkaç anahtar ile yol verme
kondansatörü devreden çıkarılır, normal çalışmada düşük bir kapasite değerine sahip
sürekli kondansatör ile çalışmasına devam eder.
Şekil 11. Çift kondansatörlü motor [2]
12
Şekil 12’ de ki hız-moment karakteristiğine bakıldığında bu motorlar en iyi yol alma ve
normal çalışma şartlarına sahiptirler.
Şekil 12. Çift kondansatörlü motorun hız moment eğrisi [2]
2.1.7. Gölge Kutuplu Motor
Tek fazlı çok küçük güçlü motorlara yol vermenin bir şeklide gölge kutup kullanmaktır.
Şekil 13’ de görüldüğü gibi ana sargılar çıkık kutup üzerine sarılır. Gölgelendirme
bobinleri kutup ayakları altına iki ucu kısa devre edilmiş şekilde yerleştirilir.
Kutuplarda zamanla değişen akı, ana sargı tarafından indüklenir. Kutupların akısı değiştiği
zaman, akıdaki orijinal değişime zıt yönde olan bir gerilim gölgelendirme bobininde
indüklenir. Böylece kutbun bir tarafında manyetik zayıflatılmış olur. Oluşan bu
dengesizlikle rotor; gölge kutupsuz taraftan, gölge kutuplu tarafa doğru döner.[3]
13
Şekil 13.Gölge kutuplu tek fazlı motor [2]
Şekil 14’de gölge kutuplu motorun hız-moment karakteristiği verilmiştir. Bu motorlar
düşük başlatma momenti sahip iken normal çalışmada yüksek momente sahiptirler.
Verimlerinin düşük olması, güç katsayının düşük olmasına rağmen; basit yapısı ve
merkezkaç anahtar kullanılmaması nedeniyle yüksek hız gerektiren düşük güçlü
uygulamalarda kullanılırlar.
Şekil 14. Gölge kutuplu motorun hız moment eğrisi [2]
14
2.1.8. Üniversal Motor
Üniversal motor seri motor olup, hem DA hem de AA’ da kullanılmaktadır. Fırça ve
kolektöre sahiptirler. Günümüzde en çok kullanılan, her evde en az bir elektrikli alette
görev yapan üniversal motorlar yüksek devirlerde çalışırlar. Güçleri yüksek değildir. [2]
2.1.9. Değerlendirme
Tek fazlı asenkron motorların çeşitleri incelediğinde; kalkış momentlerin farklı olduğu
görülmüştür. Kalkış momentleri yüksek olan motor çeşitleri; kondansatör yol vermeli ve
çift kondansatörlü motorlardır. Kalkış momentleri düşük olan motor çeşitleri ise; yardımcı
sargılı, sürekli kondansatörlü ve gölge kutuplu motorlardır. Nominal momentleri yüksek
olan motorlar sürekli kondansantörlü, çift kondansatörlü ve gölge kutuplu motorlardır.
Bu çalışmada bir fan yükü sürüleceği için; basit yapısı, düşük yol alma momenti,
ekonomikliği ve nominal momentinin yüksek olması nedeniyle gölge kutuplu motor
kullanılacaktır. Bunun yanı sıra üniversal motorda kullanılabilir.
15
2.2. Tek Fazlı AA Kıyıcı
Tek fazlı AA kıyıcılar, güç elektroniği elemanları yardımıyla AA-AA gerilim dönüşümü
yaparlar. Temel dalga frekansı değiştirilmeden; temel dalga belirli zaman aralıklarında
iletimde tutularak, temel dalganın şekli değiştirilir. Böylece temel gerilimin frekansı aynı
kalıp genliği değiştirilmiş olur.
AA kıyıcılarda, yükün gücü prensip olarak faz başına ters-paralel bağlı iki SCR
kullanılarak değiştirilir. Gerilimin pozitif alternansında bir eleman iletim iken, negatif
alternansında ise diğer eleman iletimde olur. Böylece pozitif ve negatif alternansta iletim
ve kontrol sağlanmış olur. Çok yüksek güç uygulamalarının olmadığı yerlerde iki adet
SCR kullanmak yerine; tek kontrol kapısı bulunması ve ekonomik olması sebebiyle triyak
kullanılır. Ayrıca triyakın tek kontrol kapısının bulunması kontrolü kolaylaştır.
AA kıyıcılar fırınlar, ısıtıcılar, lambalar gibi omik yüklerin kontrolü ve düşük güçlü
asenkron motorların kontrollerinde kullanılırlar. AA kıyıcılarla gerçekleştirilen motor hız
kontrolü metodu uygulamaları, fanlar ve pompalar gibi vantilatör karakteristiklerine sahip
yüklerin kontrolünde uygulanır.
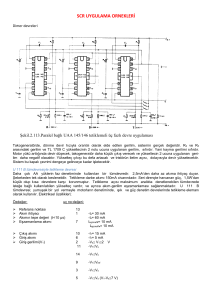
2.2.1. Tek Fazlı Temel AA Kıyıcı
Birbirine ters paralel bağlı iki SCR ile gerçekleştirilen tek fazlı bir AA kıyıcının devresi
Şekil 15’de ki gibidir. AA akımın, pozitif alternansında T1 iletimde iken negatif
alternansında ise T2 iletimdedir. Kontrol ise herhangi bir
anında SCR tetiklenmesi,
iletime sokulması ile gerçekleştirilir.
Şekil 15. Tek fazlı AC kıyıcı devresi
16
> 0 iken 0 <
Şekil 15’de verilen devrede;
< 0iken
ile T1,
<
<
aralığında üretilen pozitif tetikleme
< 2 aralığında üretilen negatif tetikleme ile T2 kontrol edilir .
Tetikleme açısı ile konrol aralığı 2.1’ deki gibi olur.
0<
<
→
>0
<
<2
→
<0
Burada;
(10)
açısında tetiklenen T1 tristörü,
Aynı şekilde; +
anında akımın sıfır olması ile kesime girer.
anında tekiklen T2 tristörü ise 2 anında akımın sıfır olması ile kesime
girer. Tetikleme açılarına bağlı olarak omik yük için çıkış gerilimleri aşağıdaki gibi
yazılır. Yükün omik-endüktif olması durumunda ise
⁄
zaman sabitine bağlı olarak
sönme açısı oluşur. Denklemlerin üst sınırı bu açıya bağlı olarak
ç
ç
(
1
=
=
1
=
1
(1 − cos(2
2
1
√2
=
) (
1
(
)−
( −
1
2
+
2(
1
2
)
)) (
+
olur. [5]
(11)
)
(12)
)
(13)
2 )
(14)
17
Tetikleme açısının değişimi ile hesaplanan gerilim değerleri Çizelge 1’ de verilmiştir.
Çizelge 1. Hesaplanan gerilim değerleri
Tetikleme Açısı (Derece)
Gerilim (Volt)
18
208
36
197
54
184
72
170
90
155
108
138
2.2.2. Bir Güç Elemanın Akım Ve Gerilimi
Bir tristör veya triyakın ileri veya ters yönde maksimum tekrarlı dayanma gerilimi tek fazlı
AA kıyıcılarda denkelem 15 ile ifade edilir.
> √2
(15)
Prensip olarak, faz gerilimi 220 V olan AC şebekeye bağlı tek fazlı AC kıyıcılarda, en az
400 ve daha emniyetli olarak 600 V’luk güç elemanları kullanılmaktadır.
Tek fazlı AC kıyıcılarda bir tristörden geçen akımın ortalama ve etkin değeri 16 ve 21’ de
ki denklemlerle hesaplanır.
=
1
2
=
1
2
sin(
(1 +
) (
)=
1
2
|−cos (
)|
(16)
(17)
)
18
=
=
=
1
2
1
2
(
) (
1
(1 − cos(2
2
1
2
= 0.5
(
)−
1
1
2
( −
2(
)
)) (
(18)
(19)
)
(20)
)
(21)
1
+
2
2 )
Ters-paralel bağlı iki tristörün yerine bir adet triyak kullanılması halinde; akımın her iki
yarım dalgasını da triyak üsteleneceğinden, periyodun π alınması sonucunda yukarıda
bulunan ortalama akımın 2 ve efektir akımın √2 ile çarpılması gerekmektedir.[5]
akımı 0,66 A olarak motor katalogundan alınmıştır. Akım değerleri triyak
kullanıldığından 2 ile çarpılmıştır. Akım değerleri Çizelge 2 ‘ de ki gibi hesaplanmıştır.
Çizelge 2. Hesaplanan akım değerleri
Tetikleme Açısı (Derece)
Akım (Amper)
18
0,64
36
0,6
54
0,56
72
0,51
90
0,47
108
0,42
19
3. TASARIM
Bu bölümde; tek fazlı asenkron motor hızının, AC kıyıcı ile nasıl kontrol edileceği
incelenecektir. Şekil 16’ da ki akış diyagramında görüldüğü gibi; öncelikle şebekenin sıfır
geçişleri algılanacak, daha sonra AA kıyıcı da kullanacağımız triyak için gerekli tetikleme
açıları mikroişlemci ile üretilip, motorun hız kontrolü sağlanacaktır. Devrenin şeması Ek3’ de verilmiştir.
Şekil 16. Proje akış diyagramı
Mikroişlemciye tetikleme işaretini üretmesi için gerekli komutlar, devre üzerindeki
butonlarla verilecektir. Butonlar tetiklemeyi artırmak veya azaltamak için kullanılcaktır.
Butona basıldığında triyak tetiklemesi 1, 2, 3, 4 ve 5 ms’ de gerçekleşecektir.
20
3.1. Sıfır Geçiş Devresi
Sıfır geçiş devresi alternatif akım eğrisinin sıfır geçişlerini kontrol etmek için kullanılır.
Elde edilen sıfır geçişleri mikroişlemci tarafından algılanır ve istenilen tetikleme işareti bu
sayede üretilir. Şebeke gerilimi trafo yardımıyla 12 V’ a düşürülmüş daha sonra diyotlar ile
doğrultulmuştur. Sıfır geçişlerinde optokuplerin çıkışı ile referans işareti karşılaştırılmış ve
kare dalga üretilmiştir. Sıfır geçişleri osiloskop tarafından Şekil 17’ de ki gibi gözlenmiştir.
Şekil 17.Sıfır geçiş devresi osiloskop çıkt ısı
3.2. LM7805 Entegresi İle Gerilim Regülasyonu
Sıfır geçiş devresinin çıkışından aldığımız gerilim değeri; kullanacağımız mikroişlemcinin
giriş portlarının 5V ile çalışmasından dolayı, 5V olmalıdır. Sıfır geçişlerinde elde edilen
işaret, girişindeki gerilimi çıkışına sabit 5 V olarak veren LM7805 entegresi yardımıyla
regüle edildikten sonra mikroişlemcinin giriş portlarına gönderilir.
21
3.3. PIC 16F877A Mikroişlemcisi
Mikroişlemci; sayısal giriş çıkışı olan, veri ve program belleği bulunan, matematiksel
işlemler yapabilen ciptir. Projede uygun tetikleme açıları mikroişlemci ile oluşturulacaktır.
Öncelikle şebekenin sıfır geçişleri algılanıp, bu sinyaller mikroişlemcinin giriş portlarına
gönderilecektir. Daha sonra arzu edilen tetikleme açıları, uygun yazılımın yapılmasıyla,
triyak tetikleme sinyali olarak mikroişlemcinin çıkış portlarından gönderilecektir.
Kullanılacak PIC 16F877 mikroişlemcinin özellikleri Çizelge 3’de ki gibidir.[6]
Çizelge 3. PIC 16F877 İşlemcisinin özellikleri
Program hafızası
14 KB
İşlemci Hızı (MIPS)
5
Veri EPPROM (Bayt)
256
Zamanlayıcılar
2 x 8-bit, 1x16 bit
Çalışma Voltaj Aralığı
2-5,5
Pin sayısı
40
3.4. Optokuplör
Optokuplör, elektriksel bağlantı olmadan düşük gerilimlerle, yüksek gerilimlerinin
kontrolünü sağlayan bir devre elemandır. Şekil 18’ de görüldüğü gibi optokuplör ile
kumanda devresi, yani mikroişlemci güç devresinden izole edilmiştir.
Şekil 18. Optokuplör bağlant ısı
22
3.5. Triyak
Triyak; ortak tetiklemeli, birbirine ters-paralel bağlı iki tristöre eşdeğer devre elamanıdır.
Şekil 19’ da triyakın devre sembolü ve tristörlü eş değeri görülmektedir. İki yönlü iletime
müsaade eden triyak; uygun tetikleme yapılmasıyla AA uygulamalarda gerilim kıyıcı veya
elektronik anahtar olarak kullanılır.
Şekil 19. Triyak sembol ve eşdeğeri
3.6. Sıvı Kristal Ekran(LCD)
LCD’ler görüntü teknolojisinin geliştirdiği bir üründür. Günlük hayatın birçok alanında
kullanılmaktadır. Projede, butonlarla istenilen tetikleme işareti üretildiğinde motorun hangi
hız seviyesinde çalıştığını görmek için kullanılacaktır. LCD ekran bacak bağlantıları
Çizelge 4’ de gösterilmiştir.
Çizelge 4. Sıvı kristal ekranın bacak bağlantıları
Pin numaraları
Bağlanılacağı yer
1, 5, 16
Toprak
15, 2
+5 V
4, 6, 11, 12, 13, 14
Mikroişlemci
23
3.7. Gerilim değişimi
Simülasyonlar sonucunda sinüs işaretindeki değişimler gözlenmiştir. Sinüs işareti 18, 36,
72, 90 derecede tetikleme sinyalleri ile kıyılacaktır. Şekil 20’ de 18 derecelik tetikleme
işareti için sinüsün değişimi gözlenmiştir.
Şekil 20. 18 derecelik tetikleme sinyalinde gerilimin şekli
24
72 derecelik triyak tetiklemesi sonucunda sinüs işaretinin değişimi simülasyonda Şekil 21
de ki gibi gözlenmiştir.
Şekil 21. 72 derecelik tetikleme sinyalinde gerilimin şekli
25
4. DENEYSEL ÇALIŞMALAR
Tasarımı yapılan sistem için deneysel çalışmalar yapılmıştır. Triyakın tetiklenmesi için bir
mikroişlemci programı yazılmıştır. Mikroişlemci programı MikroC programında
yazılmıştır ve program Ek-2’ de verilmiştir.
Triyakın tetiklenmesi sonucunda gerilimin değişimi, motorun çektiği akımın değişimi,
gerilimin şeklinin değişimi ve motorun yaptığı emişin değişimi gözlenmiştir.
4.1. Tetikleme sinyalleri
Genliği 220 V, frekansı 50 Hz olan gerilimin sıfır geçişinin algılanmasından sonra
mikroişlemci ile 1ms, 2ms, 3ms, 4ms, 5ms ve 6ms sonra triyakın tetiklenmesi için kare
dalga üretilmiştir. Böylece triyakın Gate ucuna kapı darbesi gönderilecek ve triyakın
iletime geçmesi sağlanacaktır.
Şekil 22’de tetiklenmemiş işaret görülmektedir. Her aralık 10 ms’ dir. Görüldüğü gibi
tetikleme işareti, sıfır geçiş işareti ile aynı, yani 0 ms’den başlamaktadır.
Şekil 22. Sıfır ms’ de tetikleme sinyali
Tetikleme sinyalinin 1 ms olması durumunda, işaretin osiloskop çıktısı Şekil 23’ de ki gibi
olur. Sıfır geçişi algılandıktan 1 ms sonra kare dalga üretilir.
26
Şekil 23. 1 ms’de tetikleme sinyali
Tetikleme sinyalinin 2 ms olması durumunda, işaretin osiloskop çıktısı Şekil 24’ de ki gibi
olur. Sıfır geçişi algılandıktan 2 ms sonra kare dalga üretilir.
Şekil 24. 2 ms’de tetikleme sinyali
Tetikleme sinyalinin 3 ms olması durumunda, işaretin osiloskop çıktısı Şekil 25’ de ki gibi
olur. Sıfır geçişi algılandıktan 3 ms sonra kare dalga üretilir.
27
Şekil 25. 3 ms’de tetikleme sinyali
4.2. Yüke uygulanan Gerilim
Farklı zamanlarda triyaka uygulanan kapı darbeleriyle motora uygulanan gerilim
değişmektedir. 1ms, 2ms, 3ms, 4ms,5 ms ve 6ms için farklı gerilim değerleri oluşmaktadır.
Zaman olarak verilen değerler açı cinsinden 1 ms 18 derece, 2 ms 36 derece, 3 ms 54
derece, 4 ms 72 derece, 5 ms 90 derece ve 6 ms 108 derecedir. Ölçülen gerilim değerleri
Çizelge 5’ de ki gibidir.
Çizelge 5. Ölçülen gerilim değerleri
Tetikleme Açısı (Derece)
Ölçülen Gerilim ( Volt)
18
202,1
36
191,8
54
178,9
72
164,6
90
148,3
108
130,1
28
Çizelge 5’ de ölçülen değerler, Çizelge 1 ‘ de hesaplanan değerler ile farklılık
göstermektedir. Bunun sebebi ise; triyakı tetiklemek için doğrultultuğumuz işaretin
periyodu 10 ms idi. Ancak motor endüktif bir yük olduğu için, akımın pozitif alternastan
negatif alternansa sarkmaması için, doğrultultulmuş işrarette 1 periyot için işlemler 9,5 ms
için yapıldı. 9,5 ms’ lik işlemler mikroişlemci yazılımı ile gerçekleştirilmiştir.
4.3. Gerilimin Şekli
Yüke uygulanan 220 V, 50 Hz ve sinüs formatında olan işaret, kıyıcı devresinin yani
triyakın farklı zamanlarda iletime geçmesi bozulmuştur. Farklı zamanlarda iletime geçen
triyak sinüs formatındaki işareti belirli noktalarda kesmiştir. Şekil 26’ de normal,
kıyılmamış sinüs işareti görülmektedir.
Şekil 26. Normal sinüs işareti
29
Tetikleme 1 ms ‘ de gönderilirse sinüsün şekli Şekil 27’ de ki gibi olur.
Şekil 27. 1 ms sonra iletime geçen sinüs işareti
Tetikleme 2 ms ‘ de gönderilirse sinüsün şekli Şekil 28’ de ki gibi olur
Şekil 28. 2 ms sonra iletime geçen sinüs işareti
30
Aynı şekildee tetikleme 5 ms ‘ de gönderilirse sinüsün şekli Şekil 29’ da ki gibi olur
Şekil 29. 5 ms sonra iletime geçen sinüs işareti
4.4. Yük Akımı
Ölçülen yük akımı değerleri Çizelge 6’da ki gibidir.
Çizelge 6. Motor akımı
Tetikleme Açısı (Derece)
Akım (Amper)
18
0,52
36
0,49
54
0,46
72
0,42
90
0,39
108
0,35
31
4.5. Motor devri
Değişen gerilim değerlerine göre motor devri takometre ile ölçülmüştür. Ancak motor
milinin küçük olması sebebiyle ölçümler sağlıklı olarak yapılamamıştır. Çizelge 7’ de
farklı gerilim seviyeleri için motor devirleri görülmektedir.
Çizelge 7. Farklı gerilim seviyeleri için motor devirleri
Tetikleme Açısı (Derece)
Gerilim
Motor devri ( devir/dakika)
18
202,1
10400
36
191,8
9820
54
178,9
8960
72
164,6
8110
90
148,3
7650
108
130,1
6355
4.6. Motor Gücü Ve Momenti
Motorun farklı devirlerdeki gücü ölçülmüş sonrasında denklem 9’ da yerine koyularak
moment bulunmuştur. Motor gücü ve moment değerleri Çizelge 8’ de ki gibidir.
Çizelge 8. Motor gücü ve momenti
Motor devri
w açısal hız
Güç (watt)
Moment ( NM)
10400
1089,078
52,9
0,048665
9820
1032,529
49,6
0,048037
8960
939,3294
45,1
0,048013
8110
849,2711
40,21
0,047346
7650
801,1004
37,8
0,047185
6355
675,4376
31,9
0,469882
( devir/dakika)
32
Motor devrinin düşmesiyle birlikte motorun çektiği güç azalmıştır. Moment değeri de aynı
şekilde azalma göstermiştir.
4.7. Hava debisinin değişimi
Motorun devrinin değişmesi ile hava debisi de azalmıştır. Havanın hızı, hava akış cihazı ile
her devir için ayrı ayrı ölçülmüştür. Daha sonra hava akış hızı, boru çapıyla çarpılıp debi
değerleri bulunmuştur. Boru çapı 38,5 cm karedir. Bu değerler Çizelge 9 ‘da ki gibidir.
Çizelge 9. Farklı motor devirleri için debi değerleri
Hava hızı ( m/saniye)
Debi (m3/saat)
10400
9,67
134,0262
9820
9,1
126,126
8960
8,72
120,8592
8110
7,69
106,5834
7650
6,61
91,6146
6355
4,75
65,835
Motor devri
( devir/dakika)
33
5. SONUÇLAR
Yapılan çalışmanın sonucunda triyakın farklı derecelerde tetiklenmesiyle motora
uygulanan gerilim değiştirilmiştir. Motora uygulanan gerilimin değişimiyle birlikte,
motorun devir sayısı da değiştirilmiştir. Şekil 30’ da gerilimle, motor devrinin değişimi
gösterilmektedir.
Şekil 30. Gerilimle devir sayısının değişimi
Triyakın farklı açılarda tetiklenmesiyle gerilim değerleri değiştiği gibi, motor devirleri de
değişmektedir. Motor devrinin değişmesiyle, ortam hava çeken motorun debisi de
değişmiştir. Nominal hızda , ortamdan 134 m3/saat debiyle hava çeken motor, motor
devrinin azaltılmasıyla daha az miktarda hava çekmiştir. Şekil 31’ de görüldüğü gibi devir
değişimine paralel olarak motor debisi de değişmiştir.
34
Şekil 31. Motor devrine bağlı olarak debi değişimi
Gerilim ve motor devir sayısının aynı, sabit olması durumunda debinin değiştirilmesi
isternirse, hava akışının sağlandığı kanalın çapının küçültülmesi gerekir.
35
6. DEĞERLENDİRME VE YORUM
Yapılan
çalışmalar
sonucunda
mutfak
havalandırma
sistemi
projesi
başarıyla
tamamlanmıştır.
Bitirme çalışmalarının ilk aşamasında triyaklı tek fazlı alternatif akım kıyıcı yapılmıştır.
Alternatif akım kıyıcı ile gerilim 220- 130 V bandında değiştirilmiştir. Tasarım projesi
aşamasında motor hızının gerilim düşürülerek azaltılması amaçlanmıştı. Motor olarak ise
tek fazlı ASM’lerin bir çeşidi olan gölge kutuplu motor kullanılması düşünülmüştü. Ancak
gölge kutuplu motorun hız kontrolü AA kıyıcı, yani oluşturduğumuz devre ile
sağlanamadı. Gölge kutuplu motor yerine, Özel Elektrik Makineleri dersinde Nisan
aylarının ortalarına doğru derste öğrenilen Üniversal motor ile çalışmalara devam edildi.
Üniversal motor ile yapılan çalışmalar sonucunda sistem sorunsuz bir şekilde çalıştı.
Havalandırma sistemi için kullanılan Üniversal motorun fırça ve kolektörünün bulunması
en önemli dezavantajıdır. Gölge kutuplu motora göre daha fazla bakım ister. Buna ek
olarak üniversal motorlar, gölge kutuplu motorlar gibi uzun süreli çalıştırılamazlar.
Havalandırma sistemi için üniversal motor yerine, gölge kutuplu motor kullanılması
halinde, gölge kutuplu motorun kontrolü projedeki gibi alternatif akım kıyıcı yerine
frekans çevirici ile yapılmalıdır. Böylece uzun süreli çalışabilen, bakıma ihtiyaç duymayan
asenkron motorların kontrolü sağlanabilir.
Bizim gerçekleştirdiğimiz alternatif akım kıyıcı ile üniversal motor kontrol uygulaması ise
mutfak havalandırma sistemi için kullanılmasının yanı sıra, farklı alanlarda da
kullanılabilir. Üniversal motorlarının yaygın kullanıma sahip olması, ev aletlerinde
kullanılması göz önüne alındığında gerçekleştirdiğimiz projenin uygulanma alanı fazladır.
Örneğin; elektrik süpürgesi, el blendırı, mutfak robotu, dikiş makinesi, meyve suyu sıkma
makinesi vb. aletlerde hız kontrolü için projemiz sağlıklı bir şekilde kullanılabilir.
36
KAYNAKLAR
[1]. M., Aktacir, Havalandırmaya Giriş, Isıtma Ve Havalandırma Ders Notları, Şanlıurfa,
Türkiye: Eylül, 2013
[2]. G., Bal, Özel Elektrik Makinaları, İkinci Baskı, Birsen Yayınevi, Ankara,
Türkiye: Ocak, 2004
[3]. F., Mergen, Elektrik Makineleri 2 Asenkron Makineler, Birinci Baskı, BirsenYayınevi,
İstanbul, Türkiye: Temmuz, 2009
[4]. S. J., Chapman, Electric Machinery Fundamentals, 4th ed., McGraw-Hill
Education, Boston, ABD: 2005
[5]. H., Bodur, Güç Elektroniği, İkinci Baskı, Birsen Yayınevi, İstanbul, Türkiye: Eylül
2012
[6]. (2014) The Microchip Website [Çevrimiçi]
Ulaşılabilir:http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en010242
37
EKLER
EK-1. IEEE Etik Kuralları
IEEE üyeleri olarak bizler bütün dünya üzerinde teknolojilerimizin hayat standartlarını
etkilemesindeki önemin farkındayız. Mesleğimize karşı şahsi sorumluluğumuzu kabul
ederek, hizmet ettiğimiz toplumlara ve üyelerine en yüksek etik ve mesleki davranışta
bulunmayı söz verdiğimizi ve aşağıdaki etik kuralları kabul ettiğimizi ifade ederiz.
1. Kamu güvenliği, sağlığı ve refahı ile uyumlu kararlar vermenin sorumluluğunu
kabul etmek ve kamu veya çevreyi tehdit edebilecek faktörleri derhal açıklamak;
2. Mümkün olabilecek çıkar çatışması, ister gerçekten var olması isterse sadece algı
olması, durumlarından kaçınmak. Çıkar çatışması olması durumunda, etkilenen
taraflara durumu bildirmek;
3. Mevcut verilere dayalı tahminlerde ve fikir beyan etmelerde gerçekçi ve dürüst
olmak;
4. Her türlü rüşveti reddetmek;
5. Mütenasip uygulamalarını ve muhtemel sonuçlarını gözeterek teknoloji anlayışını
geliştirmek;
6. Teknik yeterliliklerimizi sürdürmek ve geliştirmek, yeterli eğitim veya tecrübe
olması veya işin zorluk sınırları ifade edilmesi durumunda ancak başkaları için
teknolojik sorumlulukları üstlenmek;
7. Teknik bir çalışma hakkında yansız bir eleştiri için uğraşmak, eleştiriyi kabul etmek
ve eleştiriyi yapmak; hatları kabul etmek ve düzeltmek; diğer katkı sunanların
emeklerini ifade etmek;
8. Bütün kişilere adilane davranmak; ırk, din, cinsiyet, yaş, milliyet, cinsi tercih,
cinsiyetkimliği, veya cinsiyet ifadesi üzerinden ayırımcılık yapma durumuna
girişmemek;
9. Yanlış veya kötü amaçlı eylemler sonucu kimsenin yaralanması, mülklerinin zarar
görmesi, itibarlarının veya istihdamlarının zedelenmesi durumlarının oluşmasından
kaçınmak;
10. Meslektaşlara ve yardımcı personele mesleki gelişimlerinde yardımcı olmak ve
onları desteklemek.
38
We, the members of the IEEE, in recognition of the importance of our technologies
inaffecting the quality of life throughout the world, and in accepting a personal
obligationto our profession, its members and the communities we serve, do hereby
commitourselves to the highest ethical and professional conduct and agree:
1. to accept responsibility in making engineering decisions consistent with the safety,
health and welfare of the public, and to disclose promptly factors that might
endanger the public or the environment;
2. to avoid real or perceived conflicts of interest whenever possible, and to disclose
them to affected parties when they do exist;
3. to be honest and realistic in stating claims or estimates based on available data;
4. to reject bribery in all its forms;
5. to improve the understanding of technology, its appropriate application, and
potential consequences;
6. to maintain and improve our technical competence and to undertake technological
tasks for others only if qualified by training or experience, or after full disclosure of
pertinent limitations;
7. to seek, accept, and offer honest criticism of technical work, to acknowledge and
correct errors, and to credit properly the contributions of others;
8. to treat fairly all persons regardless of such factors as race, religion, gender,
disability, age, or national origin;
9. to avoid injuring others, their property, reputation, or employment by false or
mlicious action;
10. to assist colleagues and co-workers in their professional development and to
support them in following this code of ethics.
Approved by the IEEE Board of Directors
August 1990
ieee-ies.org/resources/media/about/history/ieee_codeofethics.pdf
39
EK-2. Disiplinler Arası Çalışma
Projemizi gerçekleştirirken bilmediğimiz, eksik olduğumuz, konumuzun dışındaki
alanlarda yardımlar aldık.
Projede kullandığımız üniversal motoru, ilk etapta internet ortamındaki sanal mağazalarda
aradık, ancak bulamadık. Sonrasında Trabzon’un Fatih Mahallesinde bulunan “Yılmaz
Elektronik” mağazasından temin ettik. Öğrenci olmamız hasebiyle motor ücretinde 10 TL
indirim yaptıralar. Kendilerine teşekkür ederiz.
Projede kendi yaptığımız baskı devrenin yollarının kötü çıkması nedeniyle İstanbul’ da
“Metaş PCB” şirketinden yardım istedik. Devremizi sorunsuz olarak bastılar. Öğrenci
olmamız hasebiyle PCB’ de 20 TL indirim yaptıralar ve aynı karttan 2 adet gönderdiler.
Kendilerine teşekkür ederiz.
Projede kullandığımız motorun debisini ölçmek için Üniversitemizin Makine Bölümü
öğretim üyelerinden
“Prof. Dr. Alican DALOĞLU”
ve
“Yrd. Doç. Dr. Cevdet
DEMİRTAŞ” hocalarımızdan yardım aldık. Akışkan hızı ve debi ölçümü için bizlere
yardım ettikleri için kendilerine teşekkür ederiz.
Projenin sergilenmesi aşamasında minyatür mutfak için Trabzon’un Değirmendere
Mahallesi, Demirkırlar Sanayi Sitesinde bulunan “ Model Koltuk İmalatı” kuruluşundan
yardım istedik. Minyatür mutfağımızı öğrenci olmamız hasebiyle 25 TL indirim yaparak
yaptılar. Kuruluş sahibi “Ali YILMAZ” a teşekkür ederiz.
40
EK-3. Maliyet Tablosu
Projede kullanılan BTA16 triyakı 400 V çalışma gerilimi ve yüksek akım taşıma kapasitesi
sebebiyle tercih edilmiştir. PIC16F877A mikroişlemcisi sahip olduğu pin sayısı,
ekonomikliği ve kolay temin edilebilirliğinden dolayı tercih edilmiştir. PCB, devre
elemanlarının bağlantı yollarının daha net olması ve estetik bir görünüm olmasından dolayı
hazır bastırılmıştır.
41
EK-4. Çalışma Takvimi
MUTFAK HAVALANDIRMA SİSTEMİ
Bitiş Tarihi
Süresi
Proje Adımları
Başlama Tarihi
Proje Adı :
1
2014 /I
2
3
2014 /II
4
I. İş Paketi 1
a.Tasarımın
gerçekleşmesi
b. Malzeme temini
II. İş Paketi 2
a.Deneysel çalışmalar
b. Protatip
yapımı ve testler
III. İş Paketi 3
a. Proje Raporu
hazırlanması
b. Proje teslimi
43
5
2014/III
6IIIIII
7
8
2014
9 10 11 12
EK-5. Devre Şeması
44
EK-6. Baskı Devre Şeması
45
EK-7. Mikroişlemci Kodları
// LCD Modül Bağlantıları
sbit LCD_RS at RC0_bit;
sbit LCD_EN at RC1_bit;
sbit LCD_D4 at RC2_bit;
sbit LCD_D5 at RC3_bit;
sbit LCD_D6 at RD0_bit;
sbit LCD_D7 at RD1_bit;
sbit LCD_RS_Direction at TRISC0_bit;
sbit LCD_EN_Direction at TRISC1_bit;
sbit LCD_D4_Direction at TRISC2_bit;
sbit LCD_D5_Direction at TRISC3_bit;
sbit LCD_D6_Direction at TRISD0_bit;
sbit LCD_D7_Direction at TRISD1_bit;
//Butonlar
//RB1 -> Buton1 -> +
//RB2 -> Buton2 -> //RB3 -> Buton3 -> ON / OFF
//Led ler
//RC4 -> %100 Ledi
46
//RC5 -> %75 Ledi
//RC6 -> %50 Ledi
//RC7 -> %25 Ledi
//Sinyaller
//RB0 -> TP2 -> Interrupt Signal
//RD2 -> TP3 -> Triyak Signal
int kademe=0; //Cihazın Bulunduğu Kademeyi Gösterir
//Kademe = 0 için, Kapalı
//Kademe = 1 için, %25
//Kademe = 2 için, %50
//Kademe = 3 için, %75
//Kademe = 4 için, %100
int durum=0; //1 için on 0 için off
int i=0;
char txt[16];
void main() {
//Port Ayarları
TRISD.B2=0; //Triyak Signal
47
PORTD.B2=0;
TRISB.B1=1; //Buton 1
TRISB.B2=1; //Buton 2
TRISB.B2=1; //Buton 3
TRISC.B4=0; //%25 Ledi
TRISC.B5=0; //%50 Ledi
TRISC.B6=0; //%75 Ledi
TRISC.B7=0; //%100 Ledi
//LCD Ayarları
Lcd_Init();
// Initialize LCD
Lcd_Cmd(_LCD_CLEAR);
Lcd_Cmd(_LCD_CURSOR_OFF);
// Ekranı temize
//
//Açılış Yazısı
Lcd_Out(1,1,"-AC 220V Motor-");
delay_ms(10);
Lcd_Out(2,1,"Baslatiliyor...");
delay_ms(500); //Cihaz Başlamadan Bekle
48
while(1) //AnaProgram Döngüsü
{
//Kapalı İken
while (durum==0)
{
if (PORTB.B3==1) { //On Off Butonuna Basılırsa
//Açılış Yazısı
Lcd_Cmd(_LCD_CLEAR);
Lcd_Out(1,1,"-AC 220VMotor-");
delay_ms(10);
Lcd_Out(2,1,"Baslatiliyor...");
delay_ms(200); //Yarım Saniye Bekle
durum==1; //Cihazı Çalıştır
kademe=1;
//Interruptları Aç
INTCON.GIE = 1; //Enable Global Interrupt
INTCON.INTE = 1; //Enable RB0/INT external Interrupt
INTCON.PEIE = 0; //Disable all unmasked peripheral interrupt
OPTION_REG.INTEDG = 1; //Interrupt on rising edge
49
//
}}
//Açık İken + - ON OFF Butonlarına Basılırsa
while (durum==1)
{
if (PORTB.B1==1) //+ Butonu
{
kademe=kademe+1;
if (kademe>4) kademe=4;
}
if (PORTB.B2==1) //- Butonu
{
kademe=kademe+1;
if (kademe>1) kademe=1;
}
if (PORTB.B3==1) //ON-OFF Butonu
{kademe=0;
durum=0;
//Interruptları Kapat
INTCON.GIE = 0; //Disable Global Interrupt
INTCON.INTE = 0; //Disable RB0/INT external Interrupt
}
50
if (durum==0)
{
PORTC.B4=0;
PORTC.B5=0;
PORTC.B6=0;
PORTC.B7=0;
Lcd_Cmd(_LCD_CLEAR);
Lcd_Out(1,1,"-AC 220V Motor-");
delay_ms(100);
Lcd_Out(2,1,"Kapatildi...");
delay_ms(250); //Yarım Saniye Bekle
}
else if (kademe==1)
{
PORTC.B4=1;
PORTC.B5=0;
PORTC.B6=0;
PORTC.B7=0;
Lcd_Cmd(_LCD_CLEAR);
Lcd_Out(1,1,"-AC 220V Motor-");
delay_ms(100);
Lcd_Out(2,1,"Seviye: %25");
delay_ms(250); //Yarım Saniye Bekle
51
}
else if (kademe==2)
{
PORTC.B4=1;
PORTC.B5=1;
PORTC.B6=0;
PORTC.B7=0;
Lcd_Cmd(_LCD_CLEAR);
Lcd_Out(1,1,"-AC 220V Motor-");
delay_ms(100);
Lcd_Out(2,1,"Seviye: %50");
delay_ms(250); //Yarım Saniye Bekle
}
else if (kademe==3)
{
PORTC.B4=1;
PORTC.B5=1;
PORTC.B6=1;
PORTC.B7=0;
Lcd_Cmd(_LCD_CLEAR);
Lcd_Out(1,1,"-AC 220V Motor-");
delay_ms(100);
Lcd_Out(2,1,"Seviye: %75");
52
delay_ms(250); //Yarım Saniye Bekle
}
else if (kademe==4)
{
PORTC.B4=1;
PORTC.B5=1;
PORTC.B6=1;
PORTC.B7=1;
Lcd_Cmd(_LCD_CLEAR);
Lcd_Out(1,1,"-AC 220V Motor-");
delay_ms(100);
Lcd_Out(2,1,"Seviye: %100");
delay_ms(250); //Yarım Saniye Bekle
}
}
}
}
void Interrupt() {
if(INTCON.INTF == 1)
{
if (kademe==4)
{PORTD.B2=1;
delay_us(9500);
53
PORTD.B2=0;
}
else if (kademe==3)
{delay_ms(2);
PORTD.B2=1;
delay_us(7500);
PORTD.B2=0;
}
else if (kademe==2)
{delay_ms(3);
PORTD.B2=1;
delay_us(6500);
PORTD.B2=0;
}
else if (kademe==1)
{delay_ms(4);
PORTD.B2=1;
delay_us(5500);
PORTD.B2=0;
}
INTCON.INTF = 0x0; // Clear External Interrupt flag at end of IF block
}
54
EK-8. STANDART VE KISITLAR FORMU
1. Projenizin tasarım boyutu nedir? Açıklayınız.
Bilimsel ve teknolojik araştırma boyutlarında yapılan bu projede tek fazlı asenkron
motorların, güç elektroniği elemanı olan triyakların araştırılması ve kıyaslanması;
gerçekleştirilecek olan tek fazlı asenkron motor hız kontrolü hakkında gerekli projenin
gerçekleştirlmesi
2. Projenizde bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Projemizde tek fazlı asenkron motorların hız denetimi matematiksel formüller ışığında
çözülmüştür.
3. Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız?
Elektrik makinaları, güç elektroniği, özel elektrik makinaları, mikroişlemciler ve proje
yönetimi derslerinde edindiğimiz bilgi ve becerileri kullandık.
4. Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
Bu projede dikkate alınan mühendislik standartları sırasıyla; NEN-EN-ISO 7730,
CEN/CR 1752, EN 15251:2007, EN13779:2007, CEN/TR 14788:2006 ‘ dır.
Kullanılan standartlar ise EN 15251:2007, CEN/TR 14788:2006 ‘dır.
5. Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir?
a) Ekonomi:
Zarar görebilecek devre elemanları seçiminde, maddi kayıplarını önlemek için
doğru tercih yapılması göz önünde bulundurulmuştur.
b) Çevre sorunları:
Projenin çevreye zararı olmadığı için, çevre sorunları hakkında bir kısıt
gözetilmemiştir.
c) Sürdürülebilirlik:
Gerekli tasarım ve deneyler yapıldıktan sonra sürdürülebilir bir projedir.
d) Üretilebilirlik:
55
Gerekli elemanların bulunması ve mevcut teknoloji ile üretilecek, satışı
yapılabilecek bir pojedir.
e) Etik:
Başka bir projeden herhangi bir alıntı yapılmadığı için etik bir projedir.
f) Güvenilirlik:
Gerekli izolasyonlar yapılacağı için, canlıları tehdit eden hiçbir unsur
bulunmamaktadır.
56
ÖZGEÇMİŞ
Hakan YAZICI:
01.11.1988 Rize’nin Ardeşen ilçesinde doğdu. İlköğretiminin Fatih İlköğretim okulunda,
orta öğretimini Ardeşen lisesinde tamamladı. Lisansı Karadeniz Teknik Üniversitesinde
devam etmektedir. Üniversite zorunlu stajlarını Çalık Enerji ve Baymina Enerjide
tamamlamıştır. Yabancı dil olarak orta seviye İngilizce bilmektedir.
Mehmet Mücahit YAĞCI
18.10.1990 ’da Trabzon’da doğdu. Eğitim öğretim hayatına Giresun’da Cumhuriyet
İlköğretim okulunda başladı. Orta öğretimini ise Giresun Anadolu Öğretmen lisesinde
tamamladı. 2008 yılında Cumhuriyet Üniversitesi Eğitim Fakültesi
Orta Öğretim
Matematik Öğretmenliği Bölümünde lisans eğitimine başladı. 2009 yılında tekrar sınava
girip
Karadeniz
Teknik
Üniversitesi
Mühendislik
Fakültesi
Elektrik-Elektronik
Mühendisliği Bölümünde lisans eğitimine başladı. Halen bu bölümde eğitimine devam
etmektedir. Yabancı dil olarak orta seviyi İngilizce bilmektedir.
Ozan Emre YILMAZER
Ocak 1990’ da Erzurum doğdu. Lise öğrenimini Trabzon Kanuni Anadolu Lisesinde
tamamlayarak 2010 yılında Lisans eğitimine Karadeniz Teknik Üniversitesi, ElektrikElektronik Mühendisliğine başladı. Halen bu bölümde eğitimine devam etmektedir.
Yabancı dil olarak İngilizce bilmektedir.
57