FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EMÜ-419 OTOMATİK KONTROL LABORATUARI
DENEY 6
ANALOG PID KONTROLÖRÜN HIZ KONTROL SİSTEMLERİNDE UYGULANMASI
VE KARAKTERİSTİKLERİ
1. Amacı:
Oransal (Proportional), İntegral ve Türev (Derivative) kontrol sistemlerin DC motorun
hız kontrolünde kullanılması ve karakteristiklerinin incelenmesi.
2. PID (Proportional + Integral + Derivative) Kontrolör:
PID (Proportional + Integral + Derivative) kontrolörün karakteristiği Deney 5’te
özetlenmiştir. Kp oransal kontrol katsayısı, Ki integral kontrol katsayısı ve Ti integral kontrol
zaman sabitesi, KD türev kontrol katsayısı ve TD türev kontrol zaman sabitesi olmak üzere şekil
6.1’deki PID kontrolörün e y r y c giriş için çıkışı;
u c (t ) K p e(t )
Kp
Ti
t
e(t )dt K
0
p
Td
de(t )
dt
(6.1)
dir. PID kontrolör parametreleri uygun seçilerek kapalı çevrimli sistemin
a) geçici rejim yanıtını,
b) sürekli rejim yanıtını
iyileştirmek için tasarlanır. Kontrolörün oransal kısmı sürekli devrede olmasına rağmen integral
kontrol düşük frekanslarda ve türev kontrol orta ve yüksek frekanslarda etkindir. İntegral kontrol
sürekli durum hatasını iyileştirirken türev kontrol ise geçici rejim hatasını iyileştirir.
Kontrolör tasarımı yapılırken geri beslemede kullanılan ölçme devresinin (sensor)
performansı ve dinamikleri göz önünde bulundurularak yapılır. Geri beslemedeki H(s) öçme
devresi dinamiği oldukça basit olanlar seçilmelidir. Aksi taktirde geri beslemede kullanılan ölçme
dinamiğinden dolayı kontrol sistemi mertebesi artar. Örneğin geri beslemede hız ölçümü için
kullanılan tako generatör ikinci mertebe davranış gösterir ve çevirim transfer fonksiyonunun
mertebesini iki mertebe artırır. Bu gibi durumlarda türev kontrol katsayılarının seçimi oldukça
problemlidir. Tako generatörün geri beslemede kullanılması, performansı ve etkileri deney 5’te
de deneysel olarak gözlemlenmiştir.
I. Kontrol
yr
+
e
uc
P.
Kontrol
-
G(s)
y
Sistem
D Kontrol
yc
H(s)
Şekil 6.1. Seri PID kontrolörün kapalı çevrimli kontrol sisteminde kullanılması.
PID kontrolörün parametreleri klasik tasarım metotlarından zaman yanıtı esas alınarak
veya frekans yanıtı esas alınarak yapılır. Seçilen kontrolör parametreleri daha sonra prototip bir
sistem yani Matlab/SIMULINK gibi bir ortamda denenerek uygun hale getirilir ve öylece pratikte
sisteme uygulanır. Günümüzde bilgisayar temelli ve en iyiyi seçme esasına göre parametre
29
seçimine olanak sağlayan veya kural temelli çalışan fuzzy, neural network, generic algorithms v.b
gibi metotlar ve algoritmalar kullanılarak en iyi, optimal, parametreye yakın PID kontrol
parametreleri elde edilir.
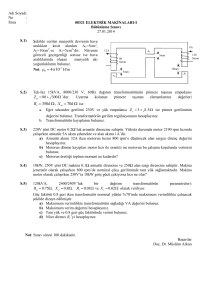
3. Deneyin Yapılışı:
Şekil 6.2’ deki devreyi oluşturunuz. Bu durumda sistemde sadece P kontrolörünün
devrede olduğuna dikkat ediniz. Amplifier #1’in kaba ayarını (gain coarse) 10, ince ayarını (gain
fine) 0.1 olarak seçiniz ve sayıcıyı (Counter) 1s sayacak şekilde ayarlayınız. Her iki direncin
kalibresini saat yönünün tersin de tam olarak döndürünüz.
Basarak servo potensiyometreyi devreden çıkarınız ve sürücü şaftı üzerindeki yükü
minimuma getiriniz.
M.C.Meter
Yr
+12V
10k
Int.
C
B
A
V
0V
B
+5V
Tacho gen.
Motor
A
Diff
Amp
Summ
Amp
Amp #1
Power
Amp
Slo. Opto -5V
L:E:D: Barg
-12V
Coun./Ti
Şekil 6.2. P (Proportional) kontrollü hız kontrol sistemi.
Skalası 20 V luk değere getirilmniş bir digital voltmetre integrator çıkışını ve M.C. meter
ise motorun girişindeki güç amplifikatörünün (Power Amplifier) çıkışını izlemek için
kullanılmıştır.
L.E.D bargraph (bir ohmluk direnç üzerindeki gerilimi dolayısıyla akımı amper cinsinden
gösteren sensor) motor akımını monitor etmek için ve Counter/timer motorun hızını gözlemek
için kullanılmışlardır.
3.1. Sistemin Açık Çevrim Olarak Çalışması:
Tachogenerator (takogeneratör) ile Differential Amplifier arasındaki bağlantıyı kaldırarak
sistemi açık çevirimli hale getiriniz. 10 k luk dirençle motorun hızını counter/timer de reset
butununa bastıktan sonra 15 dev/d olacak şekilde ayarlayınız. Bunun için gerekli olan motor
gerilimi 4V’ tur.
Motoru yüklemek için orta parmağını tırnak aşağı gelecek şekilde Hall effect diskin altına
doğru hareketlendiriniz. Motorun kolayca durduğunu, motor akımının yaklaşık 0.5 A olduğunu ve
geriliminin ise arttığını gözleyeceksiniz.
Prosedürü Amplifier # 1’ nın ince ayarını 0.5 ve 1.0 yaparak tekrarlayınız. Göreceksiniz
ki amplifier kazancı 10 k konumunu etkiler fakat motor karakteristiği üzerinde bir etkisi yoktur.
Böyle olduğunu gözlediniz mi? Bu durumu deney 2 de verilen açık çevirim sistemlerin
özelliklerini okuyarak açıklayınız?
30
3.2. Kapalı Çevrimli Oransal (P) Kontrol:
Sisteme takogeneratörü Şekil 6.2’ deki gibi tekrar bağlayarak kapalı çevirimli sistemi
oluşturunuz. Amplifier #1’ in kaba ayarını 10, ince ayarını 0.1 olarak seçiniz ve motor hızını 15
dev/d olarak ayarlayınız. Bu daha önce yapılan açık çevrim deneyindeki motor gerilimini
gerektirir.
Motoru daha önce olduğu gibi yükleyeniz. Momentin büyüdüğünü ve motora uygulanan
akım ve geriliminin arttığını göreceksiniz. Motor durgun durumda iken voltaj ve akımı not ediniz.
Amplifier #1 kazancı 10 ve 0.1 için
Motorun fren durumundaki gerilimi =
Motorun fren durumundaki akımı =
Amplifier #1’ in ince ayarını 0.3’ e yükseltiniz ve motorun gerilimi 9 V oluncaya kadar
yükleyiniz. Motor muhtemelen dönmeye çalışacaktır. Motor akımı ve gerilimini not ediniz.
Amplifier #1 kazancı 10 ve 0.3 için motor 9V uygulanacak şekilde yüklenmiş
Motora akım =
Motor hızı =
Prosedürü Amplifier #1’in ince ayarı 0.4 için tekrarlayınız.
Amplifier #1 kazancı 10 ve 0.4 için motor 9V uygulanacak şekilde yüklenmiş
Motorun akımı =
Motorun hızı =
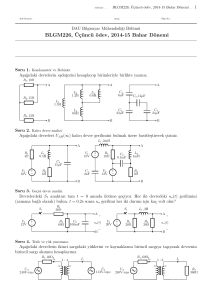
3.3. PI (Proportional + Integral) Kontrol:
Amplifier #1’ in ince ayarını 0.1’ e getiriniz ve integratör zaman sabitini 1s seçiniz.
İntegratör reset tuşuna basarak Şekil 6.3’ deki gibi toplama amplifikatörüne (Summing Amplifier)
bağlayınız ve reset tuşundan elinizi çekiniz.
Motor hızını boşta 15 rev/s getiriniz ve motorun gerilimi 9V oluncaya kadar yükleyiniz
ve bu değerde yüklemeyi mümkün olduğunca sabit tutunuz. Yük durumundaki motor hızını ve
integratör gerilimini gözleyiniz. Göreceksiniz ki motor hızı başlangıçta düşecek ve integratörün
çıkış gerilimi yükseldikçe motor hızıda boşta çalışma hızı olan 15rev/s’ ye yükselecektir. Eğer
yük sabit tutulursa integratör çıkışı da sabit olacaktır.
Böyle olduğunu gözlediniz mi?
M.C.Meter
Yr
+12V
10k
V
C
B
0V
Int.
+5V
Tacho gen.
Motor
B
A
A
Diff
Amp
Amp #1
Summ
Amp
Power
Amp
Slo. Opto -5V
L:E:D: Barg
-12V
Coun./Ti
m.
Şekil 6.3. PI hız kontrol devresi.
Sistem karakteristiğini yüksüz olarak gözleyiniz. Bu durumda hız başlangıçta artıyor ve integratör
çıkış gerilimi gittikçe düşüyor ve başlangıçtaki 15rev/s değerini alır. İntegratör otomatik olarak
sürekli durum hatasını sıfıra indirger. Hatanın sıfıra erişme süresi integratörün zaman sabitine
31
bağlıdır. İntegratörün zaman sabitini 100ms alarak prosedürü tekrarlayınız. Karakteristik aynı
olmalıdır fakat referans ile çıkış fonksiyonu arasındaki hatanın sıfıra geçiş süresi kısalır. Sizde
böyle olduğunu gözlemlediniz mi?
Amplifier #1’ in ince ayarını 0.3 yaparak prosedürü tekrarlayınız. Karakteristiğin aynı
olduğunu göreceksiniz fakat bu durumda sistemin zaman cevabı yüksek kazançtan dolayı artar.
Böyle olduğunu gözlemlediniz mi?
Sistemin açık çevirim hız-zaman karakteristiğini çiziniz?
Kapalı çevrimli sistemin hız-zaman karakteristiğini düşük, orta ve yüksek integral ve
kazançları için gözlemlerinize dayanarak çiziniz?
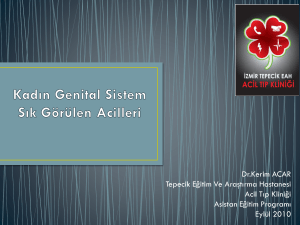
2.4. PID (Proportional + Integral + Derivative) Kontrol:
Türev alan elemanı Şekil 6.4’ teki gibi inverter ile toplama amplifikatörüne bağlayınız ve
zaman sabitini 10ms olarak ayarlayınız. 100k luk direncini saat yönü tersinde tam döndürerek
türev elemanının etkisini sıfıra indiriniz. Amplifier #1’ in kaba ayarını 10, ince ayarını 0.3
durumuna ve integratör zaman sabitini 100s’ ye ayarlayınız.
Motorun boşta çalışma hızını 15rev/s ayarlayınız, daha sonra 100k’ luk direnci gittikçe
arttırarak türev geri beslemeyi devreye alınız. Göreceksiniz ki türevin küçük değerlerinde
motorun gürültüsü artacaktır.
Bu takogenerator komütatöründen dolayı meydana gelen gürültüler, dalgalı gerilim
diferansiyel işleminden sonra büyümektedir ve bu gürültülerden oluşmuş ve bazen genliği ripple
şeklindeki elektriksel işaretler motor girişine uygulandığından dolayı motorun dönme hareketinde
titreşimlere sebep olur . Bu durumu ortadan kaldırmak için 100 k’luk direncin çıkışına bir alçak
geçiren (Low pass) filtre bağlayarak yüksek frekanstaki darbeleri kaldırınız. Alçak geçiren
filtrenin zaman sabitini 100s olarak alınız. Şimdi 100 k’luk direncin tüm değişim değerleri için
türev kontrolünün devreye alınabileceğini görebilirsiniz.
M.C.Meter
Yr
+12V
10k
V
C
B
B
A
0V
Int.
+5V
Motor
A
Diff
Amp
Amp #1
Power
Amp
Summ
Amp
Slo. Opto -5V
Coun./Ti
m.
L:E:D: Barg
-12V
C
Diff
B 100k
Inverter
A
Şekil 6.4. PID hız kontrol sistemi.
32
0V
Tacho gen.
100k’luk direnci saat yönünde tam olarak devreye alarak diferansiyel kontrolün tümünü
devreye alınız ve motoru daha önce belirtildiği şekilde yükleyerek motor gerilimini maksimum
olan 9 V’ a getiriniz.
Yükü devreden çekiniz ve motorun hızındaki etkisini gözleyiniz. PI. kontrol
karakteristiği ile karşılaştırınız.
Hız değişim aralığı ve overshoot değeri, türev kontrolün etkisi artıkça düşmelidir.
Sizde böyle olduğunu gözlediniz mi?
Diferansiyel işleminin ve alçak geçiren filtrenin zaman sabitlerini değiştirerek, sistem
karakteristiğine etkilerini görünüz. Her ikisinin artmasıyla türev etkisi artar. Böylece hız değişim
aralığının azalması ve sistemin sönüm oranın, , artmasına sebep olur.
Böyle olup olmadığını gözlemlediniz mi?
Deneyde kullanılan DC motorun doğrusal modelini kullanarak sistemin gecikmeli birinci
mertebeden davranış gösterdiği durumu esas alarak Ziegler-Nichols birinci metodunu kullanarak
P, PI ve PID kontrolörü tasarlayınız ve DC motorun hız kontrol performansını kontrolörlere göre
açıklayarak sıralayınız.
Sizce hangi kontrol performansı daha iyidir. Neden?
4. Sonuç ve Tartışma:
1. Deneylerde isteneler ve sorulanları açıklayınız ve yanıtlatınız?
2. Açık ve kapalı hız kontrolü sistemlerin performanslarını sıralayınız?
3. Tako generatörün çalıştığı aralığı belirtiniz ve araştırarak deneysel sonuçlarla
karşılaştırınız?
4. Deneyde kullanılan DC motorun doğrusal modelini kullanarak DC motorun P, PD, PI ve
PID kontrolörü root locus metodu kullanarak tasarlayınız?
5. Deneyde kullanılan DC motorun doğrusal modelini kullanarak sistemin gecikmeli birinci
mertebeden davranış gösterdiği durumu esas alarak Ziegler-Nichols birinci metodunu
kullanarak P, PI ve PID kontrolörü tasarlayınız?
6. Deneyde kullanılan DC motorun doğrusal modelini kullanarak sistemin sönümsüz
osilasyon davranış gösterdiği durumu esas alarak Ziegler-Nichols ikinci metodunu
kullanarak P, PI ve PID kontrolörü tasarlayınız?
7. Yukarda 5 ve 6 sorularda tasarlanan kontrol performanslarını karşılaştırınız?
8. Hız kontrol sistemlerinde geri besleme için gereksinme doyulan hız bilgisi başka nasıl
elde edilir araştırınız ve bulduğunuz metotların avantaj ve dezavantajlarını sıralayınız?
9. Deneyde yaptığınız bağlantı blok diyagramlarını Matlab/SIMULINK ortamında
modelleyiniz ve sonuçlarını deneyde elde ettiğiniz sonuçlarla karşılaştırınız?
33