T.C.
KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
ÜÇ FAZLI ASENKRON MOTORLARIN
TEK FAZLI ġEBEKEDEN BESLENMESĠ
Muhammet ÖZKURT
Mehmet Ali GÜRLER
Prof. Dr. Cemil GÜRÜNLÜ
Mayıs 2012
TRABZON
T.C.
KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
ÜÇ FAZLI ASENKRON MOTORLARIN
TEK FAZLI ġEBEKEDEN BESLENMESĠ
Muhammet ÖZKURT
Mehmet Ali GÜRLER
Prof. Dr. Cemil GÜRÜNLÜ
Mayıs 2012
TRABZON
LĠSANS BĠTĠRME PROJESĠ ONAY FORMU
Muhammet ÖZKURT, Mehmet Ali GÜRLER tarafından Prof. Dr. Cemil GÜRÜNLÜ
yönetiminde hazırlanan “Üç Fazlı Asenkron Motorların Tek Fazlı ġebekeden Beslenmesi”
baĢlıklı lisans bitirme projesi tarafımızdan incelenmiĢ, kapsamı ve niteliği açısından bir
Lisans Bitirme Projesi olarak kabul edilmiĢtir.
DanıĢman
: Prof. Dr. Cemil GÜRÜNLÜ
………………………………
Jüri Üyesi 1
:
………………………………
Jüri Üyesi 2
:
………………………………
Bölüm BaĢkanı
: Prof. Dr. Ġsmail H. ALTAġ
………………………………
ÖNSÖZ
Bu çalıĢma, KTÜ
Mühendislik
Fakültesi Elektrik-Elektronik
Mühendisliği
Bölümünde Bitirme Projesi kapsamında hazırlanmıĢtır. Bu çalıĢmanın, üç fazlı asenkron
motorların tek fazlı olarak çalıĢtırılması sırasında ortaya çıkacak motor performansındaki
değiĢiklikler konusunda araĢtırma yapacak kiĢilere yardımcı olacağı düĢünülmektedir.
BaĢta bizden hiçbir zaman desteklerini esirgemeyen ailemiz olmak üzere, projenin
gerçekleĢtirilebilmesi ve izlenecek yollar konusunda yardımcı olan değerli hocalarımız
Sayın Prof. Dr. Cemil GÜRÜNLÜ’ ye, Sayın Prof. Dr. Ġsmail H. ALTAġ’ a, Sayın Öğr.
Gör. Emre ÖZKOP’ a, Sayın ArĢ. Gör. Mehmet Ali USTA’ ya, ve Sayın Teknisyen Yüksel
SALMAN’ a Ģükranlarımızı sunmak istiyoruz. Ayrıca, proje kapsamında yaptığımız
deneysel çalıĢmalarda malzeme ve laboratuvar ihtiyacımızı karĢılayan KTÜ ElektrikElektronik Mühendisliği Bölüm BaĢkanlığına, Mühendislik Fakültesi Dekanlığına ve KTÜ
Rektörlüğüne teĢekkürlerimizi sunarız.
Mayıs 2012
Muhammet ÖZKURT
Mehmet Ali GÜRLER
iii
ĠÇĠNDEKĠLER
Sayfa No
LĠSANS BĠTĠRME PROJESĠ ONAY FORMU ................................................................................ ii
ÖNSÖZ ............................................................................................................................................. iii
ĠÇĠNDEKĠLER ................................................................................................................................. iv
ÖZET................................................................................................................................................. vi
SEMBOLLER VE KISALTMALAR .............................................................................................. vii
1.
GĠRĠġ ..................................................................................................................................... 1
1.1.
2.
Üç Fazlı Asenkron Motorların Tek Fazlı ġebekeden Beslenme Sebepleri .................... 1
ASENKRON MAKĠNALAR ................................................................................................. 4
2.1.
Üç Fazlı Asenkron Motorlar .......................................................................................... 4
2.1.1.
Asenkron Motorların Fayda ve Sakıncaları............................................................ 4
2.1.2.
Üç Fazlı Asenkron Motorun Yapısı ....................................................................... 5
2.1.3.
Üç Fazlı Asenkron Motorun ÇalıĢma Prensibi ve EĢdeğer Devresi ....................... 6
2.1.4.
Üç Fazlı Asenkron Motorların Tek Fazlı ġebekeden Beslenmesi .......................... 9
2.1.4.1.
Bağlantı ġekilleri ................................................................................................ 9
2.1.5.Tek Fazlı ġebekeden Beslenen Üç Fazlı Asenkron Motorun ÇalıĢma Özellikleri ... 11
3.
PROJE TASARIM ÇALIġMALARI ................................................................................... 12
3.1.
Yapılacak Deneylerin Belirlenmesi.............................................................................. 12
3.1.1.
EĢdeğer Devre Parametrelerinin Çıkarılması ....................................................... 12
3.1.1.1.
Sargı Dirençlerinin Bulunması ......................................................................... 12
3.1.1.2.
BoĢta ÇalıĢma ve Kısa Devre Deneyleri .......................................................... 13
3.1.2.
Üç Fazlı Asenkron Motora Ait Hız-Moment, Kayma-Moment, Hız-Kayma
Grafiklerinin Çıkarılması ..................................................................................................... 16
3.1.3.
4.
5.
Tek Fazlı Beslenen Üç Fazlı Asenkron Motorların Performans Deneyleri.......... 16
3.2.
Deney Düzeneğinin Tasarımı ....................................................................................... 16
3.3.
Malzeme ve Fiyat Listesi ............................................................................................. 18
SĠMÜLASYONLAR ............................................................................................................ 19
4.1.
Üç Fazlı Asenkron Motorun Üç Fazlı ÇalıĢması ......................................................... 19
4.2.
Üç Fazlı Asenkron Motorun Tek Fazlı ÇalıĢması ........................................................ 22
4.3.
Simülasyonların Yorumlanması ................................................................................... 24
DENEYLER ......................................................................................................................... 26
5.1.
Üç Fazlı Asenkron Motorun EĢdeğer Devre Parametrelerinin Çıkarılması ................. 27
5.1.1.
Sargı Dirençlerinin Ölçümü ................................................................................. 27
iv
5.1.2.
6.
7.
BoĢta ve Kısa Devre ÇalıĢma Deneyleri .............................................................. 27
5.2.
Üç Fazlı Asenkron Motorun Karakteristiklerinin Çıkarılması ..................................... 29
5.3.
Tek Fazlı Beslenen Üç Fazlı Asenkron Motorun Performans Deneyleri ..................... 30
5.3.1.
Stator Sargıları Yıldız Bağlı Ġken BoĢta ÇalıĢma ................................................. 30
5.3.2.
Stator Sargıları Üçgen Bağlı Ġken BoĢta ÇalıĢma ................................................ 31
5.3.3.
Stator Sargıları Yıldız Bağlı Ġken Yüklü ÇalıĢma ................................................ 33
5.3.4.
Stator Sargıları Üçgen Bağlı Ġken Yüklü ÇalıĢma ............................................... 34
5.4.
Çevreye Etkiler ............................................................................................................. 36
5.5.
Kısıtlamalar .................................................................................................................. 36
SONUÇLAR ........................................................................................................................ 37
6.1.
EĢdeğer Devre Parametrelerinin Belirlenmesi ............................................................. 37
6.2.
Üç Fazlı Asenkron Motorun Karakteristiklerinin Çıkarılması ..................................... 38
6.3.
Tek Fazlı Beslenen Üç Fazlı Asenkron Motorun Performans Deneyleri ..................... 41
6.3.1.
Stator Sargıları Yıldız Bağlı Ġken BoĢta ÇalıĢma ................................................. 41
6.3.2.
Stator Sargıları Üçgen Bağlı Ġken BoĢta ÇalıĢma ................................................ 42
6.3.3.
Stator Sargıları Yıldız Bağlı Ġken Yüklü ÇalıĢma ................................................ 44
6.3.4.
Stator Sargıları Üçgen Bağlı Ġken Yüklü ÇalıĢma ............................................... 46
YORUMLAR VE DEĞERLENDĠRMELER ...................................................................... 49
KAYNAKLAR ................................................................................................................................ 51
EK-1 ................................................................................................................................................. 52
STANDART VE KISITLAR FORMU ............................................................................................ 52
ÖZGEÇMĠġ ..................................................................................................................................... 54
v
ÖZET
Asenkron motorlar ucuz olmaları ve yapılıĢlarının kolay olması gibi özelliklerinden
dolayı günümüzde en çok tercih edilen motor türleridir. Özellikle üç fazlı asenkron
motorlar sanayi alanında yaygın bir Ģekilde kullanılmaktadır. Dolayısıyla bu motorlar
üzerinde yapılan araĢtırmalar da oldukça yaygındır. Bu tezin ana konusu üç fazlı asenkron
motorların tek fazlı Ģebekeden beslenmesi ve bu koĢullar altında motorun performans
deneylerinin gerçekleĢtirilmesidir. Tez kapsamında öncelikle üç fazlı asenkron motorların
genel yapısı hakkında temel bilgiler verildi. Daha sonra bu motorları tek fazlı olarak
çalıĢtırma sebeplerine ve kondansatör yardımı ile tek fazlı olarak çalıĢtırma yöntemine
değinildi. Üç fazlı asenkron motorlar üç faz ile çalıĢırken fazlardan biri kopsa dahi motor
çalıĢmaya devam eder. Ancak durduktan sonra tekrar kalkıĢ yapamaz. Tek fazlı asenkron
motorlarda olduğu gibi bir kondansatör ile yardımcı faz gerilimi oluĢturulurken aynı
zamanda fazlar arasında faz farkının oluĢması sağlanır. Böylece tek fazlı olarak çalıĢtırılan
üç fazlı asenkron motor kendiliğinden kalkıĢ yapabilir.
Tezin devamında, MATLAB/Simulink ortamında üç fazlı bir asenkron motorun hem üç
fazlı hem de tek fazlı olarak çalıĢtırılmasına iliĢkin simülasyonlar yapıldı. Bir sonraki
aĢamada ise asenkron motor için eĢdeğer devre parametrelerinin bulunmasına, bazı önemli
karakteristiklerinin çıkarılmasına ve tek fazlı olarak beslenen üç fazlı bir asenkron motorun
akım, hız, güç gibi büyüklüklerindeki değiĢimlerinin gözlenmesine yönelik deneyler
yapıldı. Deneylerin sonucunda yorum ve değerlendirmeyi kolaylaĢtırıcı grafikler çizildi.
Elde edilen grafikler ve simülasyonlar çalıĢmanın son bölümünde yorumlandı.
vi
SEMBOLLER VE KISALTMALAR
ns
Döner alan hızı
n
Rotor hızı
nr
Döner alanın rotor iletkenlerini kesme hızı
s
Kayma
p
Çift kutup sayısı
fs
Stator alanı frekansı
⍵
Açısal hız
RFE
Demir kayıpları direnci
Xm
Mıknatıslanma reaktansı
Rs
Stator sargı direnci
Xs
Stator sargı reaktansı
R’r
Statora indirgenmiĢ sargı direnci
X’r
Statora indirgenmiĢ sargı reaktansı
Im
Mıknatıslanma akımı
Me
Elektriksel moment
N.m
Newton metre
µF
Mikro Farad
kw
kilo watt
J
Eylemsizlik momenti
Tm
Yük momenti
F
Sürtünme
A
Amper
V
Volt
I0
BoĢta çalıĢma akımı
V0
BoĢta çalıĢma gerilimi
P0
BoĢta çalıĢma gücü
Ik
Kısa devre akımı
Vk
Kısa devre gerilimi
Pk
Kısa devre gücü
vii
1. GĠRĠġ
Günlük yaĢantımızın bir parçası haline gelen elektrik motorları birçok alanda yaygın
olarak kullanılmaktadır. Özellikle asenkron motorlar endüstrinin vazgeçilmez bir parçası
haline gelmiĢtir. Basit yapıları ve uygulamadaki avantajlarından dolayı üç fazlı asenkron
motorlar geniĢ bir kullanım alanına sahiptir. Yapı olarak sağlam ve ucuz olmaları, ağır iĢ
koĢullarında çalıĢabilmeleri üç fazlı asenkron motorların baĢlıca tercih nedenleri olarak
sıralanabilir. Bazı durumlarda üç fazlı asenkron motorları tek fazlı olarak çalıĢtırmak
zorunda kalabiliriz. Böyle bir çalıĢma için motorun stator sargıları yıldız veya üçgen olarak
bağlanır. Motorun sargı giriĢ uçlarının ikisine faz ve nötr uygulanırken boĢta kalan sargı
ucu ile diğer sargı uçlarından biri arasına kondansatör bağlanır. Kullanılan bu
kondansatörün amacı iki fazlı döner alan oluĢturma koĢullarını ve motorun tek fazlı
beslenmesine rağmen ilk kalkıĢ hareketini sağlamaktır.
Bu projede üç fazlı asenkron motorların tek fazlı Ģebekeden beslenmesi konusu ele
alınmıĢtır. Konuyla ilgili literatürde bulunan çalıĢmaların çoğu üç fazlı asenkron
motorların tek fazlı olarak çalıĢtırılabilmesi için en uygun kondansatör değerinin simetrili
bileşenler yöntemiyle hesaplanmasına yöneliktir [1], [2]. Ancak bu tezde, üç fazlı asenkron
motorun eĢdeğer devre parametreleri hesaplandı ve bazı önemli karakteristikleri çıkarıldı.
Daha sonra, tek fazlı çalıĢma durumundaki güç, akım, hız gibi büyüklüklere ait değiĢimler
çeĢitli deneyler yapılarak incelendi.
1.1. Üç Fazlı Asenkron Motorların Tek Fazlı ġebekeden Beslenme Sebepleri
Üç fazlı asenkron motorların bazı durumlarda tek fazlı Ģebekeden beslenmesi
gerekebilir. Bu durumlara aĢağıdaki örnekleri verebiliriz:
Üç fazlı besleme hattını asenkron motorun kullanılacağı yere taĢımak ekonomik
açıdan uygun değilse motor tek fazlı olarak çalıĢtırılabilir.
Aynı kapasiteye ( güç, verim vb. ) sahip üç fazlı ve tek fazlı asenkron motorları
karĢılaĢtırdığımızda tek fazlı asenkron motorun üretim maliyeti daha fazladır. Bu
yüzden motor üretilirken hem üç fazlı hem de tek fazlı olarak çalıĢabilecek Ģekilde
tasarlanabilir.
Bir iĢ makinesini çalıĢtırmak için üç fazlı motora ihtiyaç olabilir. Eğer iĢ
makinasının bulunduğu yere üç fazlı hat çekmek mümkün değilse bu durumda üç
fazlı asenkron motoru tek fazlı çalıĢtırma zorunluluğu doğabilir.
Üç fazlı bir asenkron motorda fazlardan birisi koparsa veya sigortalardan birisi
devresini açarsa sargı kollarından biri Ģebekeden ayrılır. Dolayısıyla üç fazlı
asenkron motor tek fazlı olarak çalıĢma durumuna düĢer.
Motoru çalıĢtıracak bir enerjinin olmadığı bir durum ile karĢılaĢılırsa, doğal
kaynaklardan faydalanılarak motor tek faz olarak çalıĢtırılabilir. Buna örnek olarak
güneĢten elde edilen enerji ile motorun çalıĢtırılması verilebilir.
Evler, küçük dükkanlar ve bunlara benzer az enerji kullanan yerlere tesisat
masrafının çok olmaması için tek faz verilir. Dolayısıyla bu tip yerlerde
kullanılacak motorların tek fazlı olması gerekir.
Projede kullanılacak ana eleman üç fazlı bir asenkron motordur. Dolayısıyla konunun
anlaĢılabilmesi için asenkron makinaya ait temel yapının ve üç fazlı asenkron motorların
çalıĢma prensibinin bilinmesi gerekir. Ancak asenkron motorların yapısı doğrudan bu
projenin konusu olmadığından, bu konuya yüzeysel olarak değinildi. Daha detaylı bilgi
sahibi olabilmek için çeĢitli kaynaklara baĢvurulabilir [3].
Yapılan projeyi bir düzen içerisinde yürütebilmek ve uygun zamanda bitirebilmek için
çizelge 1.1 deki iĢ-zaman grafiği hazırlandı.
2
Çizelge 1.1. ĠĢ-zaman grafiği.
YAPILAN ĠġLER
AYLAR VE HAFTALAR
ġubat
Mart
Nisan
Mayıs
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
Literatür taraması ve gerekli
konuların araĢtırılması
Zaman planlaması ve
laboratuvardaki malzemelerin
tespiti
Eksik malzemelerim
sipariĢinin verilmesi
Gerekli ölçümler için deney
düzeneğinin hazırlanması
Motor parametrelerinin
hesaplanması
Motorun üç fazlı Ģebekeden
beslenmesine ait ölçümlerin
gerçekleĢtirilmesi
Motorun tek fazlı Ģebekeden
beslenmesine ait ölçümlerin
gerçekleĢtirilmesi
Yapılan bitirme çalıĢmalarının
düzenlenmesi
3
2.
ASENKRON MAKĠNALAR
Asenkron makinalar yapı bakımından sağlam olmaları, bakıma çok fazla ihtiyaç
duymamaları ve ağır ortam Ģartlarında çalıĢabilmelerinden dolayı uygulamada sıklıkla
kullanılırlar. Bu makinalar temel olarak iki kısımdan oluĢur. Bunlar makinanın
hareketsiz kısmını oluĢturan stator ve hareketli kısmını oluĢturan rotordur. Asenkron
makinalar eğer stator üzerine sarılmıĢ sargılardan aldığı elektrik enerjisini rotor
aracılığıyla mekanik enerjiye dönüĢtürüyorsa motor, rotordan aldığı mekanik enerjiyi
stator sargılarında elektrik enerjisine dönüĢtürüyorsa generatör olarak çalıĢırlar.
Endüstriyel uygulamalarda bu makinalar daha çok motor olarak kullanılırlar. ġekil 2.1
de bir elektrik makinasının motor veya generatör olarak çalıĢmasına ait enerji dönüĢüm
yönleri gösterilmektedir.
ġekil 2.1. Motor ve generatör çalıĢmaya ait enerji dönüĢüm yönleri.
2.1. Üç Fazlı Asenkron Motorlar
Asenkron motorlar en çok kullanılan motorlardır. ÇalıĢma ilkelerinden dolayı bu
motorlara indüksiyon motorları da denir.
2.1.1.
Asenkron Motorların Fayda ve Sakıncaları
Asenkron motorlar günümüzde en çok kullanılan motor türleridir. Vantilatörler, su
tulumbaları, asansörler gibi çeĢitli kullanım alanları bulunmaktadır. Piyasada bu tür
motorları bulmak çok kolayken diğer türdeki motorları bulmak zaman zaman çok zor
olabilmektedir. Asenkron motorların çok kullanılmalarının sebepleri Ģöyle sıralanabilir:
YapılıĢları kolaydır.
Oldukça ucuzdur.
Özellikle sincap kafesli rotora sahip olanlarda rotorun izole edilmemesinden
dolayı bu türden motorlar çok sağlamdır ve bakımları kolaydır. Ayrıca bu türden
motorların rotorları yanmaz.
Asenkron motorların hızları yük ile çok az değiĢir.
Yüklü haldeyken kendi kendilerine yol alabilirler.
Kollektörlü alternatif akım motorlarında olduğu gibi akım fırçalar üzerinden
verilmeyip doğrudan statora verildiğinden, yüksek gerilim için üretilebilirler.
Asenkron motorlar bu olumlu özelliklerine rağmen bazı sakıncalara da sahiptir.
Bunlar:
Asenkron motorlar çalıĢma ilkelerinden dolayı, bağlı oldukları devreye endüktif
bir yük olarak etki ederler. Dolayısıyla Ģebekenin güç katsayısını bozarak arzu
edilen 1 değerinden uzaklaĢmasına neden olurlar. Normal yükle çalıĢırken bile
bozuk güç katsayıları kalkıĢ anında ve az yüklü olarak çalıĢtıklarında çok
küçüktür.
Özellikle sincap kafesli türleri, bozuk olan güç katsayıları yüzünden kalkıĢ
anında devreden çok yüksek akım çekerler. Bu da devre üzerinde ani gerilim
düĢümlerine neden olur.
Doğru akım motorlarında ve kollektörlü asenkron motorlarda olduğu gibi
kayıpsız ve kademesiz hız değiĢimi yapılamaz.
2.1.2. Üç Fazlı Asenkron Motorun Yapısı
Stator: Makinanın hareket etmeyen kısmını oluĢturur. YaklaĢık 0.5mm kalınlığında,
elektriksel olarak birbirinden yalıtılmıĢ silisyumlu saçların paketlenmesiyle oluĢan bir
yapıdır. Saçların bu özellikleri demir kayıpların azaltılmasını sağlar. Statorun iç
yüzeyine döner manyetik alan oluĢturan sargıların yerleĢtirilmesi için oluklar açılır.
Rotor: Rotor asenkron makinaların döner kısmını oluĢturur. Statorda olduğu gibi
rotor da silisyumlu saçlardan oluĢturulmuĢtur. Stator ile rotor arasındaki hava aralığı
5
küçük tutulur. Çünkü bu hava aralığının küçük tutulması bize boĢta çalıĢma akımını
küçük tutma olanağı verir. Rotor sargıları rotor üzerine açılan oluklara yerleĢtirilir.
Asenkron motorlar rotor sargılarının bağlanıĢ Ģekline göre bilezikli tip veya sincap kafes
tip olarak adlandırılırlar.
Bilezikli tip asenkron motorların rotorlarında üç faz sargıları bulunur. Bu üç sargının
birer uçları rotor içinde kendi aralarında bağlıyken, diğer uçları ayrı ayrı birer bileziğe
gelir. Rotor döndükçe bilezikler de döner. Üç adet bileziğin üzerine birer fırça
yerleĢtirilmiĢtir ve bu fırçalar üzerinden rotor sargı uçları ile dıĢ ortam arasında bağlantı
kurulur. DıĢ ortama çıkarılan sargı uçları bize bazı durumlarda büyük avantaj sağlar.
Örneğin, motorun kalkıĢ anında çektiği aĢırı akımı önlemek için dıĢ ortama çıkarılan
sargı uçlarına direnç bağlanır ve motora yol verilir.
Sincap kafes tip motorlarda ise rotor oluklarına yerleĢtirilen iletkenler rotorun her iki
ucunda halkalarla kısa devre edilir. Rotor iletkenleri rotorun her iki ucunda kısa devre
edildiği için bu iletkenlerin dıĢ ortama çıkarılma olanağı yoktur. Ayrıca rotor oluklarına
yerleĢtirilen iletkenler bakır veya alüminyum olarak seçildiği için rotorun yanacak
hiçbir kısmı yoktur. Sağlam yapılı ve ucuzdur.
Gövde: Makinayı dıĢtan gelecek mekanik darbelere karĢı korur. Ucuz olmasından
dolayı genellikle dökme demirden yapılır. Ayrıca gövde çıkıntılı yapılarak dıĢ ortamla
temas eden yüzey arttırılıp motorun soğumasına katkı sağlanır. Gövde üzerinde motorun
zemine monte edilmesi için ayaklar, taĢımayı sağlamak için kullanılan bir halka,
motorun nominal büyüklükleri ve diğer özelliklerinin bulunduğu iĢaret plakası ve stator
ile rotor sargı uçlarının bulunduğu terminal kutusu yer alır.
2.1.3. Üç Fazlı Asenkron Motorun ÇalıĢma Prensibi ve EĢdeğer Devresi
Üç fazlı asenkron motorlarda statora yerleĢtirilen sargılardan yararlanarak (2.1)
denklemiyle verilen ns devir sayısına veya (2.2) denklemiyle verilen ⍵
s açısal hızına
sahip bir döner manyetik alan oluĢturulur. Bu alan rotor iletkenlerini tarar ve indüksiyon
yasasına göre iletkenlerin ucunda bir gerilim indükler. Eğer rotor iletkenleri kapalı bir
devre oluĢturuyorsa ( sincap kafes tür gibi ) iletkenlerden akım akar. Manyetik alan
içindeki iletkenden akım aktığı için bir kuvvet oluĢur ve bu kuvvet rotoru (2.3)
denklemiyle verilen n hızında döndürür. Motor çalıĢmada rotor hızı senkron hızın
altındadır. Rotor hızı (2.4) denklemiyle verilen kayma nedeniyle döner alan hızının
6
gerisinde olacak Ģekilde döner alanı takip eder. Böylece stator sargılarından alınan
elektriksel enerji dönüĢtürülerek rotor milinde mekanik enerji olarak elde edilir.
ns =
⍵
s =
60.f s
p
2.π.f s
p
n = ns − nr
s=
n s −n
ns
( 2.1 )
( 2.2 )
( 2.3 )
( 2.4 )
Asenkron motorun çalıĢmasında döner alanın çok büyük rolü vardır. Statora
yerleĢtirilen sargılar döner manyetik alan oluĢturacak Ģekilde olduğundan, her bir
sargının oluĢturduğu akılar genlikleri eĢit, fazları 120° farklı alternatif alanlardır. ġekil
2.2 de bir demir çekirdek üzerine sarılmıĢ sargılardan AC akım akıtılınca oluĢan
alternatif alan gösterilmektedir. Statora üç faz sargısı yerleĢtirildiği için üç ayrı
alternatif alan oluĢur. Bu üç alternatif alanın bileĢkesi dairesel bir döner alandır. Döner
alanın oluĢması için gerekli koĢullar:
Sargıların sarım sayısı, kesit gibi özellikleri özdeĢ olmalıdır.
Sargılar akı eksenleri 120° farklı olacak Ģekilde statora yerleĢtirilmelidir.
Sargılara genlikleri aynı, fazları 120° farklı alternatif gerilimler uygulanmalıdır.
Bu koĢullardan biri sağlanmaz ise döner alan yerine eliptik alan oluĢur. Eliptik alanın
dairesel bileĢeni moment üretirken alternatif bileĢeni üretemez. Alternatif alandaki karĢı
düĢen akılar kayıplara yol açtığı için eliptik alan oluĢumu istenmez.
ġekil 2.2. Demir çekirdek üzerine yerleĢtirilen sargılar ile alternatif alan oluĢumu.
7
ġekil 2.3 de üç fazlı bir asenkron motorun tek fazına ait, statoruna indirgenmiĢ
eĢdeğer devresi verilmektedir. Bu eĢdeğer devreye ait parametreler motorun boĢta ve
kısa devre çalıĢmalarından yararlanılarak bulunabilir.
ġekil 2.3. Rotoru statora indirgenmiĢ üç fazlı bir asenkron motorun tek fazına ait
eĢdeğer devresi.
Bu eĢdeğer devrede gösterilen:
R FE = Demir kayıplarını temsil eder
Xm = Mıknatıslanma kayıplarını temsil eder
R s = Stator sargı direnci
Xs = Stator sargı reaktansı
R′r = Statora indirgenmiĢ rotor sargı direnci
X′r = Statora indirgenmiĢ rotor sargı reaktansı
s = Kayma
R′𝐫 .
(1−s)
𝐬
= Gerçekte olmayan, ancak motorun çalıĢma
özelliğinden ortaya çıkan ve rotordaki s
kayması ile değiĢen direnç değeridir.
8
2.1.4.
Üç Fazlı Asenkron Motorların Tek Fazlı ġebekeden Beslenmesi
Üç fazlı bir asenkron motor çalıĢırken herhangi bir nedenden dolayı fazlardan biri
devre dıĢı kalırsa, motor çalıĢmasını sürdürebilir. Örneğin üç fazlı motorun yıldız bağlı
çalıĢmasında fazlardan biri devre dıĢı kalınca diğer iki faz birbirine seri bağlı olur,
motor tek fazlı olarak çalıĢmasına devam eder. Ancak böyle bir durumda motor
kendiliğinden kalkıĢ yapamaz. Bu yüzden motorun kendi kendine yol alabilmesi için bir
yöntem geliĢtirilmiĢtir. Steintmetz tarafından bulunduğu için Steintmez Bağlaması adı
verilen kondansatörlü yol verme yöntemi üç fazlı bir asenkron motoru tek fazlı olarak
çalıĢtırmada büyük önem taĢımaktadır. Uygun bir kondansatör ile yardımcı faz gerilimi
elde edilir ve motorun kendiliğinden yol alması sağlanır. YapılmıĢ olan birçok
araĢtırmada üç fazlı asenkron motorların tek fazlı Ģebekeden beslenmesi durumunda
dinamik davranıĢlardaki değiĢimler incelenmiĢtir [4]. Dinamik davranıĢlar incelenirken
de özellikle simetrili bileĢenler metodundan faydalanılmıĢ ve üç fazlı asenkron motoru
tek fazlı Ģebekeden beslerken fazlar arasına konulması gereken en uygun kondansatör
değeri hesaplanmıĢtır. Ancak bu projede simetrili bileĢenler yöntemine girilmedi. Üç
fazlı asenkron motora ait eĢdeğer devre parametreleri hesaplandı ve bazı önemli
karakteristikleri çıkarıldı, tek fazlı çalıĢma durumundaki güç, güç faktörü, akım, hız gibi
büyüklüklere ait değiĢimler çeĢitli deney ve simülasyonlar yapılarak incelendi.
2.1.4.1. Bağlantı ġekilleri
Üç fazlı bir asenkron motorun stator sargılarının üçgen veya yıldız bağlı olma
durumlarına göre, kondansatör yardımıyla tek fazlı Ģebekeden beslenmesine ait Ģekiller
Ģekil 2.4 ve Ģekil 2.5 de gösterilmiĢtir. Her iki Ģekilde de kondansatörün görevi sargılar
arasında faz farkı yaratıp motorun tek fazlı Ģebekeye bağlandığında kendi kendine
kalkıĢ yapabilmesini sağlamaktır. Kondansatör olmazsa faz farkı oluĢmaz ve eğer
dıĢarıdan bir müdahale olmazsa motor kalkıĢ yapamaz.
9
ġekil 2.4. Stator sargıları yıldız bağlı üç fazlı asenkron motorun tek fazlı Ģebekeye
bağlantısı.
ġekil 2.5. Stator sargıları üçgen bağlı üç fazlı asenkron motorun tek fazlı Ģebekeye
bağlantısı.
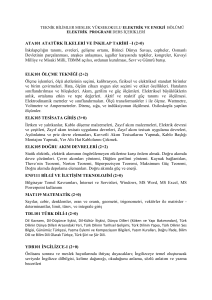
Bu bağlantılarda kullanılacak en uygun kapasite değerini belirlemek için deney
sonuçlarına göre oluĢturulmuĢ kapasitenin güç ile değiĢim grafikleri kullanılabilir.
Pratik olarak da bu kapasite değerleri belirlenebilir. Örneğin vantilatör gibi kolay
harekete geçen motorlar için kw baĢına 55-60 µF, kalkıĢ momenti büyük motorlar için
kw baĢına 95-110 µF, çamaĢır makinesi ve sıkma presi motoru için kw baĢına 130 µF
değerlerindeki kondansatörler seçilebilir.
10
2.1.5. Tek Fazlı ġebekeden Beslenen Üç Fazlı Asenkron Motorun ÇalıĢma
Özellikleri
Üç
fazlı
asenkron
motorlar
tek
fazlı
Ģebekede
çalıĢtırılıyorsa,
çalıĢma
karakteristikleri bakımından değiĢimler gözlenir. Bu değiĢimleri Ģöyle sıralayabiliriz:
Tek fazlı olarak çalıĢtırılan üç fazlı asenkron motorun:
Maksimum momenti daha küçük olur.
BoĢta çalıĢma akımı daha büyük olur.
ÇıkıĢ gücü daha küçük olur.
Kayıpları daha büyük olur.
Verimi daha düĢük olur.
11
3. PROJE TASARIM ÇALIġMALARI
3.1. Yapılacak Deneylerin Belirlenmesi
Bu proje kapsamında yapılacak olan baĢlıca deneyler Ģunlardır:
Üç fazlı asenkron motorun eĢdeğer devre parametrelerinin çıkarılması.
Üç fazlı asenkron motora ait hız-moment grafiğinin çıkarılması.
Üç fazlı asenkron motora ait hız-kayma grafiğinin çıkarılması.
Üç fazlı asenkron motora ait kayma-moment grafiğinin çıkarılması.
Tek fazlı beslenen üç fazlı asenkron motorun performans deneyleri.
3.1.1.
EĢdeğer Devre Parametrelerinin Çıkarılması
Yapılan simülasyonlarda ve deneysel ölçümlerde eĢdeğer devre parametreleri
oldukça önemlidir. Üç fazlı asenkron motorun eĢdeğer devre parametrelerini bulurken
yukarıda verilen Ģekil 2.3 deki rotoru statora indirgenmiĢ, tek faza ait eĢdeğer devre
kullanılır.
3.1.1.1. Sargı Dirençlerinin Bulunması
Statorun ve rotorun sargı dirençlerini bulurken ampermetre-voltmetre yöntemi ya da
bu mantığa göre doğrudan ölçüm yapmayı sağlayan multimetre kullanılır. Öncelikle
Ģekil 3.1 de verilmiĢ olan üçgen veya yıldız bağlı olma durumuna göre gerekli
bağlantılar oluĢturulur. Sonra sargılar doğru gerilim kaynağından beslenir, ampermetre
ve voltmetreden yararlanılarak ölçülen değerler ile sargı dirençleri hesaplanır.
ġekil 3.1. Yıldız veya üçgen bağlı stator sargı dirençlerinin ölçümü için gerekli bağlantı
Ģeması.
a) Stator sargıları yıldız bağlı
b) Stator sargıları üçgen bağlı
Statorun yıldız bağlı olması durumunda sargı dirençlerinin ölçümü deneyi iki sargı
üzerinden yapılır, üçüncü sargı ise boĢta kalır. Dolayısıyla iki sargı direnci seridir.
AĢağıda verilmiĢ olan (3.1) numaralı formülden yararlanarak tek bir sargıya ait direnç
hesaplanır.
V
R s = 2.I
( 3.1 )
Statorun üçgen bağlı olması durumunda besleme tek sargı üzerinden verildiği için
diğer iki sargı seri ve kaynağın bağlandığı sargıya paraleldir. Bu durumda sargı direnci
(3.2) denkleminden faydalanarak bulunur.
Rs =
3.V
2.I
( 3.2 )
3.1.1.2. BoĢta ÇalıĢma ve Kısa Devre Deneyleri
BoĢta çalıĢma deneyinde motor, miline bağlı bir yük bulunmadan senkron hızda
döndürülür. Senkron hızda döner alan hızı ile rotor hızı eĢit olduğu için, boĢta çalıĢmada
rotor sargı akımı Ir' sıfır olur.
n ≅ ns
s=
Rr′
s
n s −n
ns
=∞
olduğundan,
=0
ve
olur.
Ġlk olarak statorun boĢta çalıĢmasına ait boĢta çalıĢma gücü P0, boĢta çalıĢma gerilimi
13
VS0 ( faz nötr gerilimi ) ve boĢta çalıĢma akımı IS0 Ģekil 3.2 deki devreden yararlanılarak
ölçülür.
ġekil 3.2. Tek faza ait boĢta çalıĢma eĢdeğer devresi.
Daha sonra bu ölçüm sonuçları denklem (3.3), (3.4), (3.5) ve (3.6) da yerine
R FE ( demir kayıplarını temsil eden direnç ) ve Xm ( mıknatıslanma
yazılarak
kayıplarını temsil eden reaktans ) bulunur.
R FE = P
3.V so 2
o −3.R s .I so
2
Ω
( 3.3 )
V
IFE ≅ R so (A)
( 3.4 )
FE
Im =
Xm ≅
Iso 2 − IFE 2
V so
Im
Ω
A
( 3.5 )
( 3.6 )
Kısa devre deneyinde rotor milinin dönmesi mekaniksel olarak engellenir.
Dolayısıyla;
n=0
s=
Rr ′
s
n s −n
ns
= Rr ′
olduğundan,
= 1 ve
olur.
Tek faza ait kısa devre eĢdeğer devresi Ģekil 3.3 de verilmektedir. Rotorun statora
indirgenmiĢ direnci küçük olduğundan dolayı direnç üzerinden büyük akımlar akabilir.
Bu durumu önlemek için stator akımı yavaĢ yavaĢ, nominal akıma kadar arttırılır.
Böylece sargıların zarar görmesi önlenmiĢ olur. Daha sonra Pk kısa devre gücü, Vsk
14
kısa devre gerilimi ve Isk kısa devre akımı ölçülür. Ölçümler yapılırken statorun yıldız
veya üçgen bağlı olma durumlarına dikkat edilmelidir. Sonra bu ölçümler kullanılarak
(3.7), (3.8) ve (3.9) denklemleri yardımıyla kısa devre parametreleri hesaplanır.
ġekil 3.3. Tek faz kısa devre eĢdeğer devresi.
Zk =
V sk
Ω
I sk
( 3.7 )
P
R k = 3.I k 2 Ω
( 3.8 )
sk
Xk =
Zk 2 − R k 2 Ω
( 3.9 )
Bulunan bu parametreler kullanılarak statora indirgenmiĢ rotor direnci R′r , stator
reaktansı Xs ve statora indirgenmiĢ rotor reaktansı X′r (3.10) ve (3.11) denklemleriyle
elde edilir.
R′r = R k − R s Ω
Xs = X′r =
15
Xk
2
Ω
( 3.10 )
( 3.11 )
3.1.2.
Üç Fazlı Asenkron Motora Ait Hız-Moment, Kayma-Moment, HızKayma Grafiklerinin Çıkarılması
Bu deneyde motor milinin kademeli olarak frenlenmesi gerekmektedir. Böylece mil
hızı değiĢik değerlere ayarlanır ve motorun tek faz eĢdeğer devresinden yararlanarak her
hız değerine karĢılık gelen moment değerleri hesaplanır. Moment değerini
hesaplamanın bir diğer yolu (3.12) ile ifade edilen moment denklemidir [3]. Ayrıca
yukarıda (2.4) denklemiyle verilen formül ile de hız değerlerine karĢılık gelen kayma
değerleri hesaplanır. Daha sonra elde edilen karĢılıklı değerler kullanılarak üç fazlı
asenkron motorun hız-moment, kayma-moment ve hız-kayma grafikleri kolayca
çıkarılabilir.
Me =
m s .R ′ r .p
s.ω s
R′
Rs + r
2
s
Vs 2
+
ms
2
2
m
Xs σ + r X′ r σ
2
N. m
( 3.12 )
3.1.3. Tek Fazlı Beslenen Üç Fazlı Asenkron Motorların Performans Deneyleri
Bu deneyler üç fazlı asenkron motorun tek fazlı beslenmesi durumunda meydana
gelecek performans değiĢimlerini gözlemek amacıyla tasarlanmıĢtır. Deneylerin
gerçeklenmesi sırasında iki temel koĢul dikkate alınacaktır. Bu koĢullar:
Motor stator sargılarının yıldız veya üçgen bağlı olması.
Motorun yüklü veya boĢta çalıĢması.
Deneylerin sonucunda motorun değiĢik çalıĢma Ģartlarındaki performans değiĢimleri
gözlenecektir.
3.2. Deney Düzeneğinin Tasarımı
Yapılacak
olan
deneylerin
belirlenmesinden
sonra
sıra
deneylerin
gerçekleĢtirilebileceği bir deney seti tasarlamaya gelir. Yukarıda belirtilen deneyleri
yapabilmek için Ģekil 3.4 de verilen sistem tasarlandı.
16
ġekil 3.4. Deneyleri gerçekleyebilmek için yapılan sistem tasarımı.
Yukarıda görülen sistemde zemine sabitlenmiĢ iki adet motor bulunmaktadır.
Motorların ikisi de üç fazlı sincap kafes tür asenkron motordur. Bu yüzden dıĢ ortama
çıkan rotor sargı ucu yoktur. Stator sargı uçları ise dıĢ ortama çıkarılarak deney setine
bağlandı. Ayrıca deney seti üzerine 5 adet birbirinden bağımsız, 3 adet birbiriyle üçgen
bağlı 400 V’luk kondansatörler yerleĢtirildi. Ayrık kondansatörler 3x10 µF, 25 µF, 30
µF değerlerine sahiptir ve tek faz ile beslenen üç fazlı asenkron motorun performans
deneylerinde kondansatör değerinin etkisini gözleyebilmek için kullanıldı. Birbiriyle
üçgen bağlı 3x30 µF değerine sahip kondansatörler ise ikinci motoru generatör olarak
çalıĢtırıp birinci motorun milini frenlemek için gerekli mıknatıslanmayı sağlamak için
kullanıldı.
Bu deney düzeneğinde deneylerin yapılacağı ana motor birinci motordur. Birinci
motorun parametreleri bulunurken, boĢta ve kısa devre olmak üzere iki çalıĢma Ģekli
göz önüne alınır. Kısa devre deneyi yapılırken motor milini kilitlemek için bir mengene
kullanılması düĢünülmektedir. Tasarlanan sistem, birinci motorun karakteristikleri
çıkarılırken motor mil hızını değiĢtirmek için iki farklı frenleme yöntemi
uygulanabilecek Ģekilde tasarlandı. Bu yöntemler:
Ġki motoru ayrı kaynaklardan besleyip ikinci motoru frenleyici olarak
kullanmak.
17
Motorları kaplin ile birbirine bağlayıp ikinci motoru generatör olarak
çalıĢtırmak.
Deneyler sırasında yapılacak ölçümler için pano üzerine ve deney setinin yanına ölçü
aletleri koyuldu. Ayrıca motorlara yol verirken oto trafo ile yol verme yönteminin
uygulanması düĢünüldü.
3.3. Malzeme ve Fiyat Listesi
Yapılan deneylerde kullanılan malzemelerin listesi ve fiyatları çizelge 3.1 de
gösterilmiĢtir.
Çizelge 3.1. Malzeme ve fiyat listesi
Adet
1
1
20
1
1
1
2
2
1
3
1
4
Üç Fazlı Asenkron motor (1,5 kw)
Üç Fazlı Asenkron motor (3 kw)
Bağlantı Kablosu
Kaplin (6 cm çap)
Takometre
Wattmetre
Voltmetre
Ampermetre
Avometre
10 µF AC Kondansatör (400 V)
25 µF AC Kondansatör (400 V)
30 µF AC Kondansatör (400 V)
18
Birim Fiyat
(TL)
Toplam (TL)
190
190
250
250
3
60
90
90
98
98
300
300
16
32
20
40
53,6
53,6
10
30
12
12
15
60
Genel
Toplam
1.215,60
4. SĠMÜLASYONLAR
4.1. Üç Fazlı Asenkron Motorun Üç Fazlı ÇalıĢması
Deneylere ait bazı MATLAB/Simulink modelleri ve simülasyon çıktıları aĢağıda
gösterilmiĢtir. Kullanılan simülasyon programında motorun stator sargılarının üçgen
bağlanamamasından dolayı sadece yıldız bağlı duruma ait simülasyonlar yapıldı.
Simülasyonlarda kullanılan motor parametreleri çizelge 4.1 de verilmiĢtir.
Çizelge 4.1. Simülasyonda kullanılan parametreler.
UN
380 (V)
Rr’
4.149 Ω
IN
3.7(A)
LS
0.01667 (H)
nN
1375 (dev/dak)
Lr’
0.01667 (H)
Cosφ
0.8
Lm
0.334 (H)
p
2
F
0.0170 (N.m)
f
50 Hz
J
0.01242 (kg.m2)
RS
5.2 Ω
Tm
0 (N.m)
Çizelge 4.1 deki parametreler, kullanılan üç fazlı asenkron motorun boĢta ve kısa
devre çalıĢma deneyleri sonucu elde edilen ve plakası üzerinde yazan parametreleri
içermektedir. Ayrıca motor sincap kafes tür bir rotora sahiptir. ġekil 4.1 de üç fazlı
asenkron motorun üç faz ile beslenmesini temsil eden MATLAB/Simulink modeli
gösterilmektedir. Motorun boĢta çalıĢtırıldığı bu modelde stator akımının zamanla
değiĢim grafiği Ģekil 4.2 de, rotor hızının zamanla değiĢim grafiği 4.3 de ve motor
momentinin zamanla değiĢim grafiği Ģekil 4.4 dedir.
ġekil 4.1. Üç fazlı asenkron motorun üç faz ile beslenmesine ait Simulink modeli.
ġekil 4.2. Üç fazlı asenkron motorun üç faz ile beslenmesine ait stator akımı-zaman
grafiği.
20
ġekil 4.3. Üç fazlı asenkron motorun üç faz ile beslenmesine ait rotor hızı-zaman
grafiği.
ġekil 4.4. Üç fazlı asenkron motorun üç faz ile beslenmesine ait moment-zaman
grafiği.
21
4.2. Üç Fazlı Asenkron Motorun Tek Fazlı ÇalıĢması
ġekil 4.5 de üç fazlı asenkron motorun tek faz ile beslenmesini temsil eden
MATLAB/Simulink modeli gösterilmiĢtir. Motorun boĢta çalıĢtırıldığı ve 30 µF’ lık
kondansatörün kullanıldığı bu modelde stator akımının zamanla değiĢim grafiği Ģekil
4.6 da, rotor hızının zamanla değiĢim grafiği Ģekil 4.7 de ve motor momentinin zamanla
değiĢim grafiği Ģekil 4.8 dedir.
ġekil 4.5. Üç fazlı asenkron motorun tek faz ile beslenmesine ait Simulink modeli.
ġekil 4.6. Üç fazlı asenkron motorun tek faz ile beslenmesine ait stator akımı-zaman
grafiği.
22
ġekil 4.7. Üç fazlı asenkron motorun tek faz ile beslenmesine ait rotor hızı-zaman
grafiği.
ġekil 4.8. Üç fazlı asenkron motorun tek faz ile beslenmesine ait moment-zaman
grafiği.
23
4.3. Simülasyonların Yorumlanması
Üç fazlı asenkron motorların tek fazlı olarak çalıĢtırılması ile ilgili daha önce yapılan
araĢtırmalar [5] motor tek faz ile çalıĢtırılırken dinamik davranıĢın değiĢimine ve
motorun kalkıĢ yapabilmesi için gerekli olan en uygun kondansatör değerinin
saptanmasına yönelik yapılmıĢtır. Ancak bu çalıĢmanın konusu daha farklıdır. Üç fazlı
asenkron
motorun
eĢdeğer
devre
parametreleri
hesaplandı
ve
bazı
önemli
karakteristikleri çıkarıldı. Daha sonra, tek fazlı çalıĢma durumundaki güç, güç faktörü,
akım, hız gibi büyüklüklere ait değiĢimler çeĢitli deneyler yapılarak incelendi. Bu
doğrultuda, yapılan performans deneylerine ıĢık tutması açısından, MATLAB/Simulink
ortamında motorun üç faz ve tek faz ile ayrı ayrı beslenmesine iliĢkin simülasyonlar
yapıldı. Bu simülasyonların sonuçları yukarıda verilmiĢtir.
Üç fazlı asenkron motorun üç faz ile çalıĢtırılmasına ait Simulink modeli Ģekil 4.1
de, tek faz ile çalıĢtırılmasına ait model ise Ģekil 4.5 de verilmiĢtir. Her iki durumda da
çizelge 4.1 deki motor parametreleri kullanıldı ve motor boĢta çalıĢtırıldı. Bu koĢullar
altında yapılan simülasyon sonuçları incelenecek olursa:
ġekil 4.2 ve Ģekil 4.6 daki grafikleri karĢılaĢtırdığımızda, motorun kalkıĢ
anındaki ve sürekli durumdaki stator akımı üç fazlı çalıĢmada daha büyüktür.
Sürekli duruma geçiĢ süresi ise tek fazlı olarak çalıĢmada daha uzundur. Bu süre
kondansatör değeri ile değiĢtirilebilir. Tek fazlı olarak çalıĢmada akımın
dengesiz çalıĢmadan dolayı salınımı daha fazladır. Oysa üç faz ile çalıĢmada
dengesiz bir durum oluĢmadığından dolayı böyle bir sorun yoktur.
ġekil 4.3 ve Ģekil 4.7 deki rotor hızı-zaman grafiklerini karĢılaĢtırdığımızda tek
fazlı çalıĢmada sürekli duruma geçiĢ süresi daha uzun ve sürekli durumdaki
rotor hızının değeri daha düĢüktür. Ancak rotor hızındaki bu düĢüĢ çok fazla
olmamaktadır.
ġekil 4.4 ve Ģekil 4.8 deki moment-zaman grafiklerini karĢılaĢtırdığımızda, tek
fazlı çalıĢmada baĢlangıç momenti daha küçük, sürekli duruma geçiĢ süresi daha
uzun ve dengesizlikten dolayı salınım miktarı daha çoktur.
Yapılan simülasyonlarda MATLAB programı kullanıldı. MATLAB/Simulink’ te
asenkron motorun stator sargıları yalnızca yıldız bağlı olarak seçilebildiğinden stator
sargılarının üçgen bağlı olduğu duruma ait simülasyonlar yapılmadı. Yapılan
deneylerde motorun stator sargılarının yıldız veya üçgen bağlı oluĢunun motor
24
performansına etkilerini incelendi. Ayrıca, simülasyonlarda sadece 30 µF’ lık
kondansatör kullanılmasına rağmen deneylerde farklı kondansatör değerlerinin de motor
performansı üzerindeki etkileri gözlendi.
25
5.
DENEYLER
Bu deneylerde kullanılan genel deney düzeneği Ģekil 5.1 deki gibidir. Deneyler
yapılırken bu düzenek kullanıldı ve sadece üzerindeki bağlantılar değiĢtirildi.
Deneylerde kullanılan baĢlıca malzemeler:
2 adet üç fazlı asenkron motor
2 adet voltmetre
2 adet ampermetre
1 adet wattmetre
1 adet oto trafo
1 adet takometre
1 adet mengene
4 adet 30 µF değerli kondansatör
1 adet 25 µF değerli kondansatör
3 adet 10 µF değerli kondansatör
Bağlantı kabloları
ġekil 5.1. Genel deney düzeneği.
5.1. Üç Fazlı Asenkron Motorun EĢdeğer Devre Parametrelerinin Çıkarılması
Bu deney sargı dirençlerinin ölçümü, boĢta çalıĢma ve kısa devre deneyi olmak üzere
üç bölümden oluĢur. Deneye iliĢkin teorik bilgiler daha önce anlatıldığından burada
tekrar değinmeye gerek duyulmadı.
5.1.1.
Sargı Dirençlerinin Ölçümü
Üç fazlı asenkron motorun sargı direnci iki farklı Ģekilde ölçülebilir. Birinci yönteme
göre sargıların arasına DC gerilim uygulanır ve akım, gerilim değerleri ölçülerek sargı
direnci hesaplanır. Ġkinci yönteme göre ise aynı ilkeye göre çalıĢan bir ohmmetre
kullanılarak sargı direncinin ölçülmesidir. Deneyde ikinci yöntem kullanıldı. Stator
sargı uçlarına ohmmetre bağlandı ve sargı direnci 5.2 Ω olarak ölçüldü.
5.1.2.
BoĢta ve Kısa Devre ÇalıĢma Deneyleri
BoĢta çalıĢma deneyinin amacı mıknatıslanma kayıplarını temsil eden Xm reaktansı
ve demir kayıplarını temsil eden RFE direncinin bulunmasıdır. Deney bağlantı Ģeması
Ģekil 5.2 de ve gerekli deney düzeneği Ģekil 5.3 de gösterildi.
ġekil 5.2. BoĢta çalıĢma deneyi bağlantı Ģeması.
27
ġekil 5.3. BoĢta çalıĢma deney düzeneği.
BoĢta çalıĢma deneyi yapılırken sırasıyla:
Öncelikle Ģekil 5.3 deki deney düzeneğine ait bağlantılar yapıldı.
Birinci ve ikinci motor birbirinden ayrıldı.
Oto trafo yardımıyla motorun stator sargılarına nominal gerilim uygulandı.
Ölçü aletlerinden akım, gerilim, güç değerleri okunarak kaydedildi.
Kısa devre deneyinin amacı üç fazlı asenkron motorun stator sargı reaktansı Xsσ ,
statora indirgenmiĢ rotor sargı reaktansı Xrσ' ve direnci Rrσ' nın bulunmasıdır. Deney
bağlantı Ģeması Ģekil 5.4 de verilen kısa devre deneyinin düzeneği Ģekil 5.3 dekinin
aynısıdır.
28
ġekil 5.4. Kısa devre deneyi bağlantı Ģeması.
Kısa devre deneyi yapılırken sırasıyla:
ġekil 5.3 deki deney düzeneğine ait bağlantılar yapıldı.
Birinci ve ikinci motor birbirinden ayrıldı.
Birinci motorun mili mengene ile sıkıĢtırıldı.
Birinci motorun stator sargısına sargı akımı nominal akıma ulaĢıncaya kadar oto
trafo ile gerilim uygulandı.
Ölçü aletlerinden akım, gerilim, güç değerleri okunup kaydedildi.
5.2. Üç Fazlı Asenkron Motorun Karakteristiklerinin Çıkarılması
Bu deneyde motor milinin herhangi bir frenleme yöntemi ile yavaĢlatılması gerekir
ve sonra sabit hız değerlerine göre denklem (2.4) ve (3.12) kullanılarak sırasıyla kayma
ve moment değerleri elde edildi. DeğiĢik hız değerlerine göre kayma ve moment
değerlerinden oluĢan bir çizelge hazırlandı. Çizelgeden yararlanılarak hız-moment, hızkayma, kayma-moment grafikleri Excel programında çizdirildi. Deney sonuçları elde
edilirken formüllerin kullanılma nedeni, uygulanan frenleme yöntemlerinin motor milini
yavaĢlatacak moment değerlerine ulaĢamamasıydı. Frenleme yöntemi olarak:
29
Milleri birleĢtirilmiĢ iki motordan ikincisi ters yönde döndürüldü.
Fuko freni kullanıldı.
Mengene kenarlarına odun / alüminyum parçalar konularak mil sıkıĢtırıldı.
Uygulanan bu yöntemler sağlıklı sonuç vermeyince yukarıda sözü edilen formüllere
göre hesap yapıldı ve grafikler oluĢturuldu.
5.3. Tek Fazlı Beslenen Üç Fazlı Asenkron Motorun Performans Deneyleri
Bu deneylerin amacı üç fazlı bir asenkron motorun herhangi bir nedenden dolayı tek
fazlı olarak çalıĢtırılması gerektiğinde, motorun stator sargılarının bağlanıĢ biçimine ve
yük durumuna göre performans değiĢimlerinin gözlenmesidir.
5.3.1.
Stator Sargıları Yıldız Bağlı Ġken BoĢta ÇalıĢma
Deneyin amacı, değiĢik değerli kondansatörler kullanarak stator sargıları yıldız bağlı
üç fazlı asenkron motorun tek fazlı ve boĢta çalıĢtırılırken Ģebekeden çektiği akım ve
gücün kondansatör değerine göre değiĢimlerini gözlemektir. Deneye ait bağlantı Ģeması
Ģekil 5.5 de, deney düzeneği ise Ģekil 5.6 da gösterildi.
ġekil 5.5. Yıldız bağlı boĢta çalıĢma deney bağlantı Ģeması.
30
ġekil 5.6. Yıldız bağlı boĢta çalıĢma deney düzeneği.
Deney yapılırken sırasıyla:
Birinci ve ikinci motor birbirinden ayrıldı.
ġekil 5.6 daki bağlantılar oluĢturuldu.
Birinci motorun faz giriĢ uçlarından ikisi arasına 25 µF’ lık kondansatör
bağlandı.
Birinci motorun diğer faz ucu ile herhangi bir faz ucu arasına 220 V AC
gerilim uygulandı.
Birinci motorun Ģebekeden çektiği akım ve güç değerleri kaydedildi.
Aynı iĢlemler 60 µF değerine kadar 5 µF aralıklarla tekrarlanıp sonuçlar
kaydedildi.
5.3.2.
Stator Sargıları Üçgen Bağlı Ġken BoĢta ÇalıĢma
Deneyin amacı, değiĢik değerli kondansatörler kullanarak stator sargıları üçgen bağlı
üç fazlı asenkron motorun tek fazlı ve boĢta çalıĢtırılırken Ģebekeden çektiği akım ve
31
gücün kondansatör değerine göre değiĢimlerini gözlemektir. Deneye ait bağlantı Ģeması
Ģekil 5.7 de, deney düzeneği ise Ģekil 5.8 de gösterildi.
ġekil 5.7. Üçgen bağlı boĢta çalıĢma deney bağlantı Ģeması.
ġekil 5.8. Üçgen bağlı boĢta çalıĢma deney düzeneği.
32
Deney yapılırken izlenen sıra yıldız bağlı boĢta çalıĢma deneyi ile aynı olduğundan
burada tekrar yazılmadı. Aralarındaki tek fark üçüncü adımda gerekli bağlantıların Ģekil
5.8 e göre yapılmasıdır.
5.3.3.
Stator Sargıları Yıldız Bağlı Ġken Yüklü ÇalıĢma
Deneyin amacı, değiĢik değerli kondansatörler kullanarak stator sargıları yıldız bağlı
üç fazlı asenkron motorun tek fazlı ve yüklü çalıĢtırılırken Ģebekeden çektiği akım ve
gücün, mil hızının, yük uçlarındaki gerilimin kondansatör değerine göre değiĢimlerini
gözlemektir. Deneye ait bağlantı Ģeması Ģekil 5.9 da, deney düzeneği ise Ģekil 5.10 da
gösterildi.
ġekil 5.9. Yıldız bağlı yüklü çalıĢma deney bağlantı Ģeması.
33
ġekil 5.10. Yıldız bağlı yüklü çalıĢma deney düzeneği.
Deney yaparken sırasıyla:
Birinci ve ikinci motorun milleri kaplin ile birbirine bağlandı.
ġekil 5.10 daki bağlantılar oluĢturuldu.
Ġkinci motor generatör olarak çalıĢtırılacağı için faz giriĢ uçlarına 3 fazlı omik
bir yük bağlandı.
Birinci motorun faz giriĢ uçlarından ikisi arasına 25 µF’ lık kondansatör
bağlandı.
Birinci motorun diğer faz ucu ile herhangi bir faz ucu arasına 220 V AC gerilim
uygulandı.
Birinci motorun Ģebekeden çektiği akım ve güç değerleri, mil hızı, ikinci
motorun stator sargı uçlarında üretilen gerilim değerleri ölçülerek kaydedildi.
Aynı iĢlemler 60 µF değerine kadar 5 µF aralıklarla tekrarlanıp sonuçlar
kaydedildi.
5.3.4.
Stator Sargıları Üçgen Bağlı Ġken Yüklü ÇalıĢma
Deneyin amacı, değiĢik değerli kondansatörler kullanarak stator sargıları üçgen bağlı
üç fazlı asenkron motorun tek fazlı ve yüklü çalıĢtırılırken Ģebekeden çektiği akım ve
gücün, mil hızının, yük uçlarındaki gerilimin kondansatör değerine göre değiĢimlerini
34
gözlemektir. Deneye ait bağlantı Ģeması Ģekil 5.11 de, deney düzeneği ise Ģekil 5.12 de
gösterildi.
ġekil 5.11. Üçgen bağlı yüklü çalıĢma deney bağlantı Ģeması.
ġekil 5.12. Üçgen bağlı yüklü çalıĢma deney düzeneği.
35
Deney yapılırken izlenen sıra yıldız bağlı yüklü çalıĢma deneyi ile aynı olduğundan
burada tekrar yazılmadı. Aralarındaki tek fark ikinci adımda gerekli bağlantıların Ģekil
5.12 ye göre yapılmasıdır.
5.4. Çevreye Etkiler
Üç fazlı bir asenkron motorun tek fazlı olarak çalıĢtırılması çevreyi olumsuz yönde
çok fazla etkilemez. Ancak çalıĢma koĢulları yeterince iyi değilse, ortaya çıkaracağı
gürültü insanları rahatsız edebilir. Bu yüzden en uygun kondansatör değeri seçilmelidir.
Ayrıca enerjili haldeki motorda oluĢabilecek bir arıza sonrasında motorun gövdesi
gerilim altında kalabilir. Bu durumu önlemek için motorun koruma topraklaması
mutlaka yapılmıĢ olmalıdır. Aksi takdirde motorun gövdesine dokunan insanlar tehlikeli
temas gerilimine maruz kalırlar. Bu da ölümcül olaylara neden olabilir.
5.5. Kısıtlamalar
Bu çalıĢma Türkiye Ģartlarında yapıldığı için, motor üç faz ile beslenirken
380V– 50Hz, tek faz ile beslenirken de 220V–50Hz’ lik gerilim ve frekans
değerleri standart değerlerdir. Oto transformatör gibi elemanlar kullanılarak bu
değerler üzerinde değiĢiklikler yapılabilir ve motor farklı koĢullarda
çalıĢtırılabilir. Ancak bu durum ekonomiklik açısından uygun değildir. Motor
kalkıĢ anında yaklaĢık olarak nominal akımının 3-5 katı kadar akım çeker. Bu
aĢırı akımlara dikkat edilmelidir. Aksi takdirde motor sargıları zarar görebilir.
Üç fazlı asenkron motoru tek fazlı olarak çalıĢtırırken yardımcı faz gerilimi
oluĢturan kondansatörün değeri motorun gücüne göre seçilmelidir. Uygun
kondansatör değerinin seçimi için hesap yöntemleri olmasına rağmen bunlar
oldukça karmaĢıktır. Bu yüzden, çeĢitli deneyler sonucu oluĢturulmuĢ
tablolardan yararlanarak motorun gücüne göre kondansatör seçimi yapılır.
Kısa devre deneyi yapılırken nominal akımın üzerine çıkılmamalıdır ve uzun
süreli deney yapılmamalıdır. Aksi takdirde motor sargıları yanar.
36
6.
SONUÇLAR
6.1. EĢdeğer Devre Parametrelerinin Belirlenmesi
Öncelikle asenkron motorun stator sargılarının yıldız bağlı oluĢu hatırda tutularak,
bir direnç ölçer ( ohmmetre ) yardımıyla stator faz sargısına ait direnç değeri 5.2 Ω
olarak ölçüldü.
BoĢta çalıĢma ve kısa devre deneylerinden elde edilen sonuçlar çizelge 6.1 dedir.
Çizelge 6.1. BoĢta çalıĢma ve kısa devre deneylerinin sonuçları
BoĢta ÇalıĢma Deneyi Sonuçları
Kısa Devre Deneyi Sonuçları
V0(f-n)
220 V
Vk(f-n)
51.96 V
I0
2.1 A
Ik
3.7 A
P0
150 W
Pk
384 W
Elde edilen bu değerler kullanılarak motorun eĢdeğer devre parametreleri daha önce
verilen formüllerden yararlanarak hesaplandı.
R FE =
IFE ≅
Im =
3. Vso 2
Po − 3. R s . Iso 2
=
2202
= 1788,09 Ω
50 − 5,2x2,12
Vso
220
=
= 0,123 (A)
R FE
1788,09
Iso 2 − IFE 2 =
2,12 − 0,1232 (A)
Xm ≅
Vso
220
=
= 104,96 Ω
Im
0,96
Zk =
Vsk 51,96
=
= 14,04 Ω
Isk
3,7
Rk =
Pk
3. Isk
Xk =
2
=
128
= 9,349 Ω
3,72
Zk 2 − R k 2 =
14,042 − 9,3492 = 10,474 Ω
R′r = R k − R s = 9,349 − 5,2 = 4,149 Ω
Xsσ = Xrσ ′ =
Xk 10,474
=
= 5,237
2
2
6.2. Üç Fazlı Asenkron Motorun Karakteristiklerinin Çıkarılması
Çizelge 6.2 de asenkron motora ait eĢdeğer devre parametreleri, çift kutup sayısı ve
denklem (3.12) ye ait bazı parametrelerin değerleri verildi.
Çizelge 6.2. Hesaplamalarda kullanılan parametreler.
ωs
Xrσ'
Xsσ
Rr'
Rs
Vs
ms
mr
p
157
5.237
5.237
4.149
5.2
220
3
3
2
Asenkron motorun değiĢik mil hızlarına karĢılık gelen kayma ve moment değerleri
çizelge 6.3 de verildi.
38
Çizelge 6.3. DeğiĢik motor mil hızlarına karĢılık gelen kayma ve
moment değerleri.
n
1500
1450
1400
1350
1300
1250
1200
1150
1100
1050
1000
950
900
850
800
750
700
650
600
550
500
450
400
350
300
250
200
150
100
50
0
⍵
157
151,7667
146,5333
141,3
136,0667
130,8333
125,6
120,3667
115,1333
109,9
104,6667
99,43333
94,2
88,96667
83,73333
78,5
73,26667
68,03333
62,8
57,56667
52,33333
47,1
41,86667
36,63333
31,4
26,16667
20,93333
15,7
10,46667
5,233333
0
s
0
0,03333
0,06667
0,1
0,13333
0,16667
0,2
0,23333
0,26667
0,3
0,33333
0,36667
0,4
0,43333
0,46667
0,5
0,53333
0,56667
0,6
0,63333
0,66667
0,7
0,73333
0,76667
0,8
0,83333
0,86667
0,9
0,93333
0,96667
1
Me
0
6,801869
12,35886
16,75866
20,14379
22,67485
24,50773
25,78188
26,6159
27,10749
27,33534
27,36197
27,23654
26,99743
26,67451
26,29089
25,86445
25,40895
24,93499
24,45068
23,96221
23,47427
22,99039
22,51322
22,04468
21,58614
21,13858
20,70263
20,27866
19,86687
19,46727
Çizelge 6.3 de elde edilen değerlere göre hız-moment, hız-kayma, moment-kayma
grafikleri çizildi. Hız-moment grafiği Ģekil 6.1 de, hız-kayma grafiği Ģekil 6.2 de ve
moment- kayma grafiği Ģekil 6.3 de verildi.
39
1600
1400
1200
0
Hız (d/dk)
1000
800
600
400
200
0
0
5
10
15
Moment (N.m)
20
25
30
ġekil 6.1. Üç fazlı asenkron motorun hız-moment grafiği.
Hız (d/dk)
1600
1400
1200
1000
800
600
400
200
0
0
0,2
0,4
Kayma, s
0,6
ġekil 6.2. Üç fazlı asenkron motorun hız-kayma grafiği.
40
0,8
1
30
Moment (N.m)
25
20
15
10
5
0
0
0,2
0,4
0,6
Kayma, s
0,8
1
1,2
ġekil 6.3. Üç fazlı asenkron motorun moment-kayma grafiği.
6.3. Tek Fazlı Beslenen Üç Fazlı Asenkron Motorun Performans Deneyleri
6.3.1.
Stator Sargıları Yıldız Bağlı Ġken BoĢta ÇalıĢma
Stator sargıları yıldız bağlı üç fazlı asenkron motor tek fazlı ve boĢta çalıĢırken,
kullanılan çeĢitli kondansatör değerleri için kaydedilen ölçüm sonuçları çizelge 6.4 de
verildi.
Çizelge 6.4. Farklı kondansatör değerleri için kaydedilen ölçüm
sonuçları.
Stator Sargıları Yıldız Bağlı Ġken BoĢta ÇalıĢma
Kondansatör
Uygulanan
Hız (d/dk)
Akım (A) Güç (W)
(µf)
Gerilim (V)
25
30
35
40
45
50
55
60
1500
1500
1500
1500
1500
1500
1500
1500
220
220
220
220
220
220
220
220
41
0,57
0,72
1,14
1,51
2,04
2,48
3
3,53
122,5
152,5
210
270
355
440
545
660
Kaydedilen deney ölçümlerini kullanarak oluĢturulan akım-kondansatör değiĢim
grafiği Ģekil 6.4 de, güç-kondansatör değiĢim grafiği Ģekil 6.5 de verildi.
4
3,5
Akım (A)
3
2,5
2
1,5
1
0,5
0
0
5
10
15
20
25
30
35
40
45
50
55
60
65
Kondansatör (µf)
ġekil 6.4. Yıldız bağlı iken boĢta çalıĢmada Ģebekeden çekilen akımın
kondansatör değeriyle değiĢimi.
700
600
Güç (W)
500
400
300
200
100
0
0
5
10
15
20
25
30
35
40
45
50
55
60
65
Kondansatör(µf)
ġekil 6.5. ġebekeden çekilen akımın kondansatör değeriyle değiĢimi.
6.3.2.
Stator Sargıları Üçgen Bağlı Ġken BoĢta ÇalıĢma
Stator sargıları üçgen bağlı üç fazlı asenkron motor tek fazlı ve boĢta çalıĢırken,
kullanılan çeĢitli kondansatör değerleri için kaydedilen ölçüm sonuçları çizelge 6.5 de
verildi.
42
Çizelge 6.5. Farklı kondansatör değerleri için kaydedilen ölçüm sonuçları.
Stator Sargıları Üçgen Bağlıyken BoĢta ÇalıĢma
Kondansatör
Uygulanan
Hız (d/dk)
Akım (A) Güç (W)
(µf)
Gerilim (V)
25
1500
220
4,65
260
30
1500
220
4,47
255
35
1500
220
4,17
254
40
1500
220
3,93
250
45
1500
220
3,6
247
50
1500
220
3,45
255
55
1500
220
3,23
265
60
1500
220
3,03
274
Kaydedilen deney ölçümlerini kullanarak oluĢturulan akım-kondansatör değiĢim
grafiği Ģekil 6.6 de, güç-kondansatör değiĢim grafiği Ģekil 6.7 de verildi.
5
4,5
4
Akım (A)
3,5
3
2,5
2
1,5
1
0,5
0
0
5
10
15
20
25
30
35
40
45
50
55
Kondansatör (µf)
ġekil 6.6. ġebekeden çekilen akımın kondansatör değeriyle değiĢimi.
43
60
65
Güç (w)
300
280
260
240
220
200
180
160
140
120
100
80
60
40
20
0
0
5
10
15
20
25
30
35
40
45
50
55
60
65
Kondansatör (µf)
ġekil 6.7. ġebekeden çekilen gücün kondansatör değeriyle değiĢimi.
6.3.3. Stator Sargıları Yıldız Bağlı Ġken Yüklü ÇalıĢma
Stator sargıları yıldız bağlı üç fazlı asenkron motor tek fazlı ve yüklü çalıĢırken,
kullanılan çeĢitli kondansatör değerleri için kaydedilen ölçüm sonuçları çizelge 6.6 da
verildi.
Çizelge 6.6. Farklı kondansatör değerleri için kaydedilen ölçüm sonuçları.
Stator Sargıları Yıldız Bağlıyken Yükte ÇalıĢma
Kondansatör
Uygulanan GiriĢ Akımı GiriĢ Gücü
Hız (d/dk)
(µf)
Gerilim (V)
(A)
(W)
25
1360
220
3,49
740
30
1360
220
3,5
745
35
1380
220
3,52
760
40
1382
220
3,54
785
45
1390
220
3,78
835
50
1392
220
4
890
55
1392
220
4,41
960
60
1392
220
4,71
1030
44
Kaydedilen deney ölçümlerini kullanarak oluĢturulan akım-kondansatör değiĢim
grafiği Ģekil 6.8 de, güç-kondansatör değeri değiĢim grafiği Ģekil 6.9 da ve hızkondansatör değiĢim grafiği Ģekil 6.10 da verildi.
5
Akım A)
4
3
2
1
0
0
5
10
15
20
25
30
35
40
Kondansatör (µf)
45
50
55
60
65
ġekil 6.8. ġebekeden çekilen akımın kondansatör değeriyle değiĢimi.
1200
1000
Güç (W)
800
600
400
200
0
0
5
10
15
20
25
30
35
40
45
50
55
Kondansatör (µf)
ġekil 6.9. ġebekeden çekilen gücün kondansatör değeriyle değiĢimi.
45
60
65
1500
1350
1200
Hız (d/dk)
1050
900
750
600
450
300
150
0
0
5
10
15
20
25
30
35
40
45
50
55
60
65
Kondansatör (µf)
ġekil 6.10. Motor hızının kondansatör değeriyle değiĢimi.
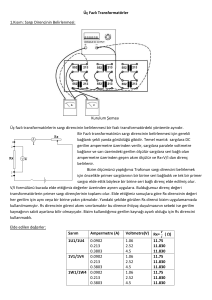
6.3.4. Stator Sargıları Üçgen Bağlı Ġken Yüklü ÇalıĢma
Stator sargıları üçgen bağlı üç fazlı asenkron motor tek fazlı ve yüklü çalıĢırken,
kullanılan çeĢitli kondansatör değerleri için kaydedilen ölçüm sonuçları çizelge 6.7 de
verildi.
Çizelge 6.7. Farklı kondansatör değerleri için kaydedilen ölçüm sonuçları.
Kondansatör
(µf)
25
30
35
40
45
50
55
60
Stator Sargıları Üçgen Bağlıyken Yükte ÇalıĢma
Uygulanan GiriĢ Akımı GiriĢ Gücü
ÇıkıĢ
Hız (d/dk)
Gerilim (V)
(A)
(W)
Gerilimi(V)
1450
220
5,74
940
261
1456
220
5,64
940
267
1460
220
5,45
920
267
1460
220
5,3
915
268
1460
220
5,1
910
268
1460
220
5
910
268
1460
220
4,89
910
268
1460
220
4,77
910
268
46
Kaydedilen deney ölçümlerini kullanarak oluĢturulan akım-kondansatör değiĢim
grafiği Ģekil 6.11 de, güç-kondansatör değiĢim grafiği Ģekil 6.12 de ve hız-kondansatör
Akım (A)
değiĢim grafiği Ģekil 6.13 de verildi.
6
5,5
5
4,5
4
3,5
3
2,5
2
1,5
1
0,5
0
0
5
10
15
20
25
30
35
40
45
50
55
60
65
Kondansatör (µf)
ġekil 6.11. ġebekeden çekilen akımın kondansatör değeriyle değiĢimi.
1000
900
800
Güç (W)
700
600
500
400
300
200
100
0
0
5
10
15
20
25
30
35
40
45
50
55
Kondansatör (µf)
ġekil 6.12. ġebekeden çekilen gücün kondansatör değeriyle değiĢimi.
47
60
65
1500
1350
1200
Hız (d/dk)
1050
900
750
600
450
300
150
0
0
5
10
15
20
25
30
35
40
45
Kondansatör (µf)
ġekil 6.13. Motor hızının kondansatör değeriyle değiĢimi.
48
50
55
60
65
7. YORUMLAR VE DEĞERLENDĠRMELER
Asenkron motorun hız-moment grafiği incelendiğinde moment yokken yani
boĢta çalıĢma durumundayken hızın senkron hıza yaklaĢık olarak eĢit olduğu
gözlendi. Yük momenti yani motorun miline etkiyen moment arttıkça, devrilme
( kritik ) momenti değerine kadar hızın yaklaĢık doğrusal olduğu, motor miline
etkiyen moment kritik moment değerini aĢtığında ise hızın aniden düĢtüğü
gözlendi.
Asenkron motora ait hız-kayma grafiği incelendiğinde kaymanın hız ile ters
orantılı olarak değiĢtiği gözlendi. Zaten (2.4) denklemiyle verilmiĢ olan kayma
denkleminden kayma ile hız değiĢiminin doğrusal olduğu açıkça görülmektedir.
Stator sargıları yıldız bağlı iken boĢta çalıĢma deneyi yapıldığında elde edilen
grafikler incelendi. Üç fazlı asenkron motor tek fazlı Ģebekeden yüksüz ve stator
sargıları yıldız bağlı iken faz sargılarına nominal gerilim uygulanarak beslendi.
Motorun çalıĢması için gerekli kondansatör değeri kademeli olarak arttırıldı.
Motorun Ģebekeden çektiği akım ve güç, kondansatör değeri ile birlikte artıĢ
gösterdi. Bu artıĢın sebebi artan kondansatör değeri ile azalan eĢdeğer
empedanstır. Kondansatör değeri 60 µF’ a ulaĢtığında motor yaklaĢık olarak
nominal akımını çekti. Devir sayısı ise 1500 d/dk senkron hızında sabit kaldı.
Stator sargılarının üçgen bağlı iken boĢta çalıĢma deneyi yapıldığında elde
edilen grafikler incelendi. Bu çalıĢma durumunda kondansatör değeri
arttırıldıkça motorun Ģebekeden çektiği akımın değeri düĢtü. Kondansatör değeri
kademeli olarak arttırıldığında motorun Ģebekeden çektiği güç kondansatörün 45
µF değerine kadar düĢtü. Daha büyük kapasite değerlerine çıkıldığında ise
çekilen gücün yeniden artmaya baĢladığı gözlendi. Gücün 45 µF’ da minimum
değere düĢmesi rezonans olayıyla bağdaĢtırıldı.
Stator sargıları yıldız bağlı iken yüklü çalıĢma deneyi yapıldığında elde edilen
grafikler incelendi. Bu çalıĢma durumunda yük olarak birinci motora bağlanan
ikinci asenkron motor generatör modunda çalıĢtırıldı. Generatörün her bir fazına
50 W’ lık 2 ampul seri olarak bağlandı. Kondansatör değeri kademeli olarak
arttırıldığında birinci motorun çektiği akım değeri 45
µF değerine kadar
sabit ve nominal akıma yakın çıktı. 45 µF’ tan sonra çekilen akım ve güç
değerlerinde artıĢ olmasına rağmen birinci motorun hızı 1392 d/dk’ da
sabitlendi. Bu çalıĢma durumunda 45 µF’ lık kondansatör değeri aĢılmamalıdır.
Çünkü bu değerin üzerinde motorun çektiği akım nominal akımın üzerine
çıkmaya baĢladı. Dolayısıyla motor sargıları yanabilir.
Stator sargıları üçgen bağlı iken yüklü çalıĢma deneyi yapıldığında elde edilen
grafikler incelendi. Kondansatör değeri kademeli olarak arttırıldığında
Ģebekeden çekilen akımın düĢtüğü, kondansatör değerinin 40 µF’ ı aĢmasından
sonra çekilen gücün sabit kaldığı, devir sayısının ise kondansatör değerleri için
yaklaĢık 1460 d/dk’ da sabit kaldığı gözlendi.
50
KAYNAKLAR
[1]. S. S. Murthy and G. J. Berg, “Transient analysis of a three phase induction motor
with single phase supply”, IEEE Trans. Power App. Syst., vol. PAS-102, no. 1, pp.
28-37, Jan. 1983.
[2]. J. E. Brown, C. S. Jha, “The starting of a three-phase induction motor connected to
a single-phase supply system”, Proc. IEE, Pt. A, Vol. 106, 1959, pp. 183-190.
[3]. M. K. Sarıoğlu, M. GökaĢan, S. Boğosyan, “Asenkron Makinalar ve Kontrolü”,
Birsen Yayınevi, Y. 0029, 7-18, 29-41, 78-96, Ġstanbul, 2003.
[4]. E. Yalçın, “ Tek Fazlı ġebekeden Beslenen Üç Fazlı Asenkron Motorun Dinamik
DavranıĢı”, KTÜ Elektrik-Elektrik Mühendisliği Yüksek Lisans Tezi, Trabzon,
1991.
[5]. S. E. M. De Oliviera, “Operation of three-phase induction motors connected to one
phase supply”, IEEE Trans. Energy Convers. , vol. 5, no. 4, pp. 713-718, Dec.
1990.
51
EK-1
STANDART VE KISITLAR FORMU
Bitirme Projesinin hazırlanmasında Standart ve Kısıtlarla ilgili olarak, aĢağıdaki soruları
cevaplayınız.
1. Projenizin tasarım boyutu nedir? Açıklayınız.
Üç fazlı asenkron motorun tek fazlı Ģebekeden beslenmesi ile ilgili simülasyonlar
yapıldı. Üç fazlı asenkron motorun parametreleri çıkarıldı. Tek fazlı beslenen üç fazlı
ASM’nin performans deneyleri yapıldı.
2. Projenizde bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Mühendislik problemi çözmedik.
3. Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız?
Elektrik Makinaları I dersinden üç fazlı asenkron motorların yapısı, karakteristikleri
ve döner alanın nasıl oluĢtuğuna ait bilgileri kullandık. Matlab/Simulink bilgilerimizi
simülasyonları gerçekleĢtirmek için kullandık. Grafikleri oluĢtururken de Excel
programından faydalandık.
4. Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
Türkiye’de kullanılan Ģebeke gerilimi ve frekansı dikkate alınarak proje
gerçekleĢtirildi. Ayrıca arızalara karĢı topraklama gibi önlemler dikkate alındı.
5. Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir?
a) Ekonomi:
Üç fazın kullanılamadığı bir ortamda motoru tek fazlı olarak çalıĢtırıp, üç fazın
veya tek fazlı motorun temin edilmesi gibi problemler ortadan kaldırılmıĢ olur.
b) Çevre sorunları:
Üç fazlı asenkron motor tek fazlı Ģebekeden beslendiğinden dolayı dengesiz
yüklenme söz konusudur. Bu durum gürültüye sebep olabilir ve çevreye
olumsuz yansıyabilir.
52
c) Sürdürülebilirlik:
Bu proje sürdürülebilirlik özelliğine sahiptir. Çünkü, motorun performansında
düĢüĢ olmasına rağmen birçok durumda pratik çözümler sunmaktadır.
d) Üretilebilirlik:
Üç fazlı asenkron motorlar tek fazlı olarak da çalıĢabilecek donanıma sahip bir
Ģekilde üretilebilir. Bu da ekonomiklik sağlar.
e) Etik:
Bu proje etik bir projedir. Ancak yukarıda da belirtildiği gibi çevreye olan etkileri
göz önünde bulundurulmaz ve gerekli güvenlik önlemleri alınmazsa, projeyi
gerçekleĢtiren kiĢi ya da kiĢiler etik kurallarına aykırı hareket etmiĢ olur.
f) Sağlık:
Projenin uygulanma aĢamasında motorun koruma topraklaması yoksa motorda bir
arıza olduğunda motora dokunan kiĢi zarar görebilir.
g) Güvenlik:
Motorun hem üç fazlı hem de tek fazlı çalıĢma durumlarında, “f” Ģıkkında da
belirtildiği gibi, motora dokunabilecek bir canlının arıza anında yüksek gerilim
altında kalmaması için koruma topraklamasının yapılması gereklidir. Ayrıca
çalıĢır haldeki motorun milinden uzak durulmalıdır.
h) Sosyal ve politik sorunlar:
Bu projenin sosyal ve politik açıdan bir sorunu bulunmamaktadır.
Projenin Adı
Projedeki Öğrencilerin adları
Üç Fazlı Asenkron Motorların Tek Fazlı Şebekeden
Beslenmesi
240016 Muhammet ÖZKURT 220715 Mehmet Ali GÜRLER
Tarih
30.05.2012
İmzalar
53
ÖZGEÇMĠġ
1987 yılında Kocaeli ilinin Körfez ilçesinde doğdu. Ġlköğretim eğitimini Yarımca
Ġlköğretim Okulu’nda (2001), lise eğitimini Kocaeli Endüstri Meslek Lisesi’nde (2004),
önlisans eğitimini Kocaeli Üniversitesi Endüstriyel Elektronik bölümünde (2007)
tamamladı.
Lisans
eğitimine
Karadeniz
Teknik
Üniversitesi
Elektrik-Elektronik
Mühendisliği bölümünde son sınıf öğrencisi olarak devam etmektedir.
Mehmet Ali GÜRLER
1989 yılında Trabzon ilinin Akçaabat ilçesinde doğdu. Ġlköğretim eğitimini Mevlüt
Selami Yardım Ġlköğretim Okulu’nda (2003), Lise eğitimini Akçaabat Yabancı Dil
Ağırlıklı Lisesi’nde (2007) tamamladı. . Lisans eğitimine Karadeniz Teknik Üniversitesi
Elektrik-Elektronik Mühendisliği bölümünde son sınıf öğrencisi olarak devam etmektedir.
Muhammet ÖZKURT
54