FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
EMÜ-419 OTOMATİK KONTROL LABORATUARI
DENEY 9
İNVERTERLE BESLENEN ÜC FAZLI ASENKRON MOTORUN
PC İLE AÇIK ÇEVRİM HIZ KONTROLÜ
1.Amaç:
İnverter ile beslenen bir asenkron motorun, PC ile tanımlanan ve hedeflenen hız yörüngesini
açık çevrim olarak takip etmesini yapmak ve sistem ara değişkenlerini PC ortamında Data
Management System (DMS) ile ayrık zamanda gözlemlemek.
2.Asenkron motorlarda hız denetimi:
Kontrol sistemlerinde asenkron motorlar temel sürücü sistemlerinden biridirler. Asenkron
motorlar günümüzde kontrol sistemlerinde kullanılan motorların %90’nını oluştururlar. Bilindiği gibi
asenkron motorların hızları besleme kaynak frekansına ve motorun kutup sayısına bağlıdırlar. P çift
kutbuna ve f frekansına sahip bir asenkron motorun senkron hızı aşağıdaki denklemle verilir;
N s 60 f / P (d/d) rpm
(9.1)
burada Ns motorun senkron hızıdır. Gerçekte asenkron motorun rotor hızı senkron hıza ulaşmaz.
Çünkü, makinenin mekanik kayıplarının kendisi motora yük oluşturur. Denklem (9.1) de görüldüğü
gibi asenkron motor parametreleri sabit bir besleme frekansı ve çift kutup sayısı için sabit hızda döner.
Sabit gerilim ve sabit frekanslı bir AC kaynaktan beslenen 3 fazlı bir asenkron motorun
moment-kayma karakteristiği Şekil 9-1 de gösterilmiştir.
Moment
Maksimum
Moment
Çalışma
Bölgesi
Hız
Kayma=1
Kayma=0
Şekil 9.1. 3 Fazlı asenkron motorun moment–hız karakteristiği.
Şekil 9-1 de belirtilen yüksüz durumdaki sıfır rotor kayması teoriktir pratikteki motor uygulamalarında
buna ulaşmak mümkün değildir. Yük arttıkça motorun maksimum momentinin üretildiği koşula
ulaşıncaya kadar motorun hızı azalacaktır. Eğer yük daha da arttırılırsa motor duracaktır. Yüksüz ve
tam yük koşulları arasında motor hızı yaklaşık yüksüz durumdaki değerinin %10’u kadar değişir.
52
Denklem (9.1)’den görüldüğü gibi bir asenkron motorun hızı kutup sayısı P veya besleme frekansı f
değiştirilerek iki şekilde yapılabilir.
2.1 Kutup Sayısının Değiştirilmesi:
Kutup sayısını değiştirerek hız kontrolü ancak belli ve sınırlı hızlar için söz konusudur. Örnek
olarak değişik kutup sayılarına sahip motorlardan 50 Hz ‘lik bir besleme frekansında 3000, 1500, 750,
600 d/d v.s. senkron hızlar elde etmek mümkündür. Bununla birlikte her aralıkta hız kontrolü yapmak
mümkün değildir. Bir asenkron motorun stator sargılarının en fazla iki veya üç değişik kutup sayısına
sahip olacak şekilde sarılabileceği düşünülürse, kutup sayısı değiştirme yöntemiyle bir asenkron
motordan ancak iki veya üç farklı hız elde etmek mümkündür.
2.2 Giriş Frekansının Değiştirilmesi:
Giriş frekansının değiştirilmesi denklem (9.1)’ de görüldüğü gibi motor hızı besleme frekansı
(f )değiştirilerek yapılabilir. Günümüzde besleme gerilimini ve frekansını değiştirme olanağı veren ve
endüstride AC-AC konverter olarak bilinen yöntemler geliştirilmiştir. Bu yöntemlerle motorun hızı
istenilen değerler arasında değiştirilebilmektedir. Bu deneyde inverter (evirici olarak adlandırılan) ile
beslenen bir asenkron motorun hız denetimi analog ve dijital ortamda yapılacak ve gözlemlenecektir.
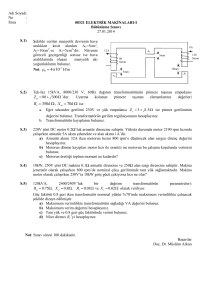
Deneyde kullanılan Dijital ve Analog birimler deneyin blok diyagramı Şekil 9.2’de blok olarak
belirtilmiştir.
Set-Point
D/A
Sıfır Tutucu
Devre
a
b
Dijital Ortam; PC ve
DMS’nin D/A kısmı
Asenkron
Motor
İnverter
c
Analog Ortam; DMS’nin A/D kısmı, Inverter ve
Tako generator
Şekil 9.2. Asenkron motorun açık çevrim hız kontrolü
Şekil 9.2 (a) PC ile Data Management System’i (DMS) göstermektedir. PC ile hedeflenen
hız yörüngesi tanımlanır ve tanımlanan bu yörünge DMS’ nin D/A çıkışı ile invertere iletilir. Şekil
9.2(b)’de verilen inverter üç fazlı transistor köprü inverterdir. Manual ve otomatik olarak çıkışı 2-100
Hz arasında değiştirilebilmektedir. Motorun hız yönü inverterin işlemcisi tarafından kontrol edilebilen
faz sırası belirlenmektedir.
Deneyde işaret işleyişi;
a) PC ortamında belirlenen hız hedefi, DMS ile invertere iletilmektedir.
b) İnverter hedeflenen yörünge için gerekli olan üç fazlı çıkışı Şekil 9.2(c)’de gösterilen üç
fazlı asenkron motora iletmektedir.
2.3 Değişken Besleme Gerilimi ve Frekansının Asenkron Motorun Dinamiğine Etkisi:
Bir asenkron motorun imal edildiği frekans dışındaki frekanslarda kullanılması durumunda
diğer çalışma faktörlerini de göz önünde bulundurmak gerekir. Bu faktörlerden en önemlisi stator sargı
empedansının kaynak frekansı ile değişmesidir. Statordaki her bir fazın empedansı aşağıdaki ifade ile
verilir;
Z 2 R 2 X L2
X L 2fL
(9.2)
Yukarıdaki denklemden görüldüğü gibi kaynak frekansının artması toplam sargı empedansının
artmasına neden olacaktır. Sabit gerilimde bu durum akımın ve dolayısıyla çıkış gücünün azalması
demektir. Kaynak frekansının azalmasıyla da sargı empedansı azalacağından sabit gerilimde bu durum
motorun stator akımında bir artışa neden olacaktır. Akımdaki artış aynı zamanda çıkış momentinin
53
artışı demek olduğundan bu, manyetik devrenin saturasyonuna, sargıların ısınmasına ve sargıların
zarar görmesine neden olabilecektir. Pratikte, akımın kaynak frekansı ile bu şekilde değişimi motorun
gerilim-frekans oranının sabit tutulmasıyla engellenir. Yani;
Gerilim(V)/Frekans(f) = Sabit
Eğer frekans ile orantılı olarak gerilim de değiştirilirse bunun sonucunda sabit bir motor akımı elde
edilir. Bu oran aynı zamanda hava aralığı akısının bir ifadesi olduğundan sonuçta sabit v/f ile çalışma
motorun sabit bir moment üretmesine sebep olacaktır. Yüksek frekanslarda motora uygulanabilecek
maksimum gerilimin üzerine çıkılacağından dolayı v/f oranı sabit tutulamaz. Örnek olarak 50 Hz’lik
bir motorun çalışma gerilimi 380 V iken bu motorun frekansı 75 Hz’e(1.5kat) çıkarıldığında gerilimi
de v/f sabit tutmak için 1.5 kat artırılamaz. Arttırıldığı taktirde motor yanacaktır!!! Bu yüzden yüksek
frekanslarda v/f oranı düşeceğinden, motora sağlanan akım azalacak ve dolayısıyla motorun üreteceği
moment de azalacaktır. Diğer bir deyişle motor hızı senkron hızın üzerine çıktığında, motorun
çalışması sabit moment bölgesinden sabit güç bölgesine kayacaktır.
İkinci bir faktör ise, düşük frekanslarda motora uygulanan gerilim, v/f oranını sabit tutmak için
azaltılacağından Denklem 9.2’den de görüldüğü gibi R stator sargı direnci üzerindeki gerilim düşümü
(I*R) motora uygulanan gerilimin yanında ihmal edilemeyecek bir seviyeye ulaşır. Bu da sağlanan
akımı azaltacağından motorun kalkış performansını etkileyecektir. Düşük hızlardaki bu dezavantajı
gidermek için motora uygulanan gerilim stator sargı direncindeki gerilim düşümünü kompanze edecek
oranda arttırılır (voltage boost).
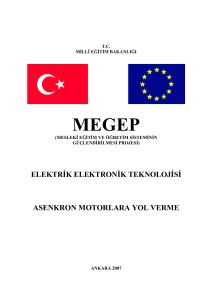
2.4 Üç Fazlı İnverterle Besleme Frekansının Değiştirilmesi:
İnverterle beslenen değişken hızlı 3-fazlı bir asenkron motor sürücüsünün blok diyagramı
Şekil 9.3’de verilmiştir. İnverter, bir DC kaynaktan bir AC alternatif akım üreten elektronik bir
düzenektir. DC kaynak tek faz veya üç fazlı bir doğrultucu vasıtasıyla elde edilir (Şekil 9.3’deki
1.blok). Çıkışta istenilen değerde gerilim ve frekanslı bir AC işaret, inverterdeki güç anahtarını uygun
bir modülasyon algoritmasına göre anahtarlayarak elde edilir. Bu çıkış işareti genelde 3-fazlı asenkron
motorların beslemesinde kullanılır.
3-fazlı Gerilimi ve
Frekansı Sabit Şebeke
DC Link
3-fazlı Gerilimi ve
Frekansı Değişken
C
Giriş
Çıkış
Şekil 9.3. İnverterle Değişken Gerilim ve Frekans Elde Edilmesi.
Pratik bir inverter sisteminin gereksinimini karşılayacak bir çok farklı teknik ve devre
konfigürasyonları vardır. Modern kullanımda endüstrideki inverterlerin en yaygın çeşidi darbe genişlik
modülasyon (PWM) tekniğine dayanır. Bu deneyde kullanılacak inverter de PWM tekniğini
kullanmaktadır.
3. Deneyin yapılışı:
Deney üç kısımdan oluşmaktadır.
3.1 Sabit Frekanslı Kaynaktan Beslenen Asenkron Motorun Hızı:
Şekil 9.4’de bağlantı şeması verilen ve asenkron makineyi direkt sabit frekanslı şebekeye
bağlayan düzeneği kurunuz. FH2 Test yatağındaki Start (Yeşil) tuşuna basarak motora yol veriniz ve
motorun hızını okuyunuz. Motorun kaç kutuplu olduğunu denklem (9.1)’den faydalanarak not ediniz.
54
TEST BED
Şekil 9.4. Deney 3.1’in Bağlantı Şeması
3-fazlı asenkron motor test yatağı üzerimde bulunan bir DC motor vasıtası ile yüklenmektedir. Test
yatağı üzerindeki moment kontrol düğmesi aracılığıyla yük momentini kontrol etmek mümkündür. 0.1
N.m’lik adımlarla asenkron motora uygulanan yük momentini motor durana kadar arttırın. Her adım
için hız ve moment değerlerini kaydedin. Deney esnasında aldığınız sonuçları kullanarak moment-hız
karakteristiğini ölçekli bir kağıda çiziniz. Çizdiğiniz karakteristik hakkında yorum yapınız.
3.2 Analog Olarak Değişken Frekanslı İnverterle Motor Dönüş Yönünün ve Hızının
Değiştirilmesi:
Bu deneyde MPM1015 olarak adlandırılan 3-fazlı inverter Şekil 9.5 deki gibi bağlayınız.
Accelerate butonunu sağ tarafa sonuna kadar döndürerek kalibrasyonunu sağlayınız. RUN/STOP
butonunu RUN konumuna getiriniz. Controller butonunu da INT pozisyonuna getiriniz. Speed
butonunu sağa döndürerek motorun gittikçe hızlandığını gözleyiniz. Osiloskopta besleme
gerilimindeki ve motor akımındaki değişimleri gözleyiniz ve not ediniz.
Osiloskop
İNVERTER
MPM1015
Hız
FH2
Moment
TEST BED
Şekil 9.5. Deney 3.2’nin Bağlantı Şeması
Daha önceki deneyde motorun 1500 d/d sabit bir hızda dönmesine rağmen şimdi osiloskopta
gözlediğiniz değişken frekanslı inverter çıkışıyla motorun 0-3000 d/d arasında döndürüldüğüne dikkat
ediniz. Motorun ters yönde döndürmek için Reverse/Forward anahtarının bir önceki konumunu
değiştirin ve tekrar Speed butonuyla motorun ters yönde hızlandığını ve hızının ayarlanabileceğini not
ediniz. Gözlediğiniz akım ve gerilim şekillerini ölçekli olarak çiziniz. Frekansı arttırdıkça osiloskop
55
yardımıyla PWM modundan kare dalga moduna geçiş sürecini gözlemleyiniz. Bu olayın oluştuğu
frekansı not ediniz. Aynı işlemleri 25 Hz ve 75 Hz için tekrarlayınız. Gözlemlediğiniz dalga şekilleri
üzerinde yorum yapınız. Motorun yükünü arttırdıkça akım ve gerilim dalga şekillerini gözlemleyiniz
ve yorumlayınız.
3.3 Bilgisayarla Hybrit (Analog-Dijital) Olarak Motor hızının Açık Çevrimli Olarak
Ayarlanması:
Şekil 9.6’daki bağlantı şemasını kurunuz. Bu bağlantı şemasındaki DMS2, data işleme ve
aktarma birimidir. DMS’nin yazılım programını C:\DMS2 de DMS2 yazıp çalıştırınız. MPM1015 üç
fazlı inverter biriminin Control butonunu EXT konumuna getiriniz. Bu durumda motorun 3000 d/d
sabit bir hızla döndüğünü ve inverterin çıkışındaki gerilimin frekansını not ediniz. Bu frekans
inverterde elde edilebilecek en yüksek frekanstır.
DMS2’nin mönüsünden Controller bölümünün değişkenlerinden;
Controller
Control
Process Variable
ACTIVE
OPEN LOOP
SPEED
olarak seçiniz.
Osiloskopa
INVERTER
Speed/Trq
Output
TEST BED
Şekil 9.6. Deney 3.3’ün Bağlantı Şeması.
Hedeflenen hız zaman grafiği Şekil 9.7’deki gibi olsun. Set-Point Options kısmına giderek
kaç tane aralık (Set-Points) kullanacağınızı seçiniz. Şekil 9.7 bir hız-zaman grafiği verilmiştir. Her bir
aralığı sırasıyla aşağıdaki Set-Point 1 de olduğu gibi zaman ve hız değerlerini giriniz.
Time
5
Set-Point
2500
Change Set-Point 1
56
Şekil 9.7’ deki hedeflenen hız diyagramı gereği motor 3000 d/d den 5 sn içinde sıfıra gelecek
ve 5 sn durduktan sonra ters yönde 3000 d/d 5 sn içerisinde ulaşacak ve 5 sn bu devirde
döndükten sonra 10sn içinde ters yönde maksimum devirle dönecektir. DMS2’nin Setup
değerleri değiştirilmediği sürece bu işlem sürekli devam edecektir.
n(d/d)
Sp 1
Sp 2
Sp 3
Sp 4
Sp 5
Sp 6
5000
2500
t(sn)
5
10
15
20
25
30
Şekil 9.7. Hedeflenen Hız Yörüngesi
Controller kısmında PID Parameters opsiyonundan sadece Invert Contol Output
seçilmediğine dikkat ediniz. Aksi taktirde DMS’ nin çıkışı saturasyona girer ve 9.999 volt
seviyesini gösterir buda İnverterin frekensını 100 Hz yapar ve motor 3000 d/d döner.
Controller kısmındaki Set-Point işlemi bittikten sonra Logger kısmına geçiniz ve Go
seçeneğini seçip enterleyiniz. Son işlem olarak F2 fonksiyon tuşuna basarak PC de
tanımlanan ve hedeflediğiniz yörüngeyi (Set-Point) devreye sokunuz. Sonucu gözleyiniz.
Sizde bir yörünge planlaması yaparak deneyde uygulayın ve sonucu gözleyiniz.
4. Sonuç ve Tartışma:
1. Deneyde gözlemlediğiniz sonuçları grubunuzla tartışınız?
2. Birinci ve ikinci deneydeki asenkron motorun performansını karşılaştırınız?
3. Asenkron motorlarda hız ayarının motorun performansına etkisini araştırınız?
4. Üçüncü deneydeki açık çevirim hız takibinin uygulama alanları sizce nelerdir?
57