1
İMPULS-MOMENTUM
z
A) Lineer impuls-Lineer Momentum
G=mv
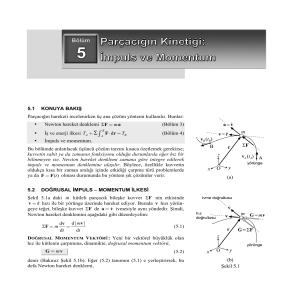
m kütleli parçacığın uzayda eğrisel boyunca
yaptığı hareketi inceleyelim. v hızı yörüngeye
teğet olup a v ivmesi ise parçacık üzerine
etkiyen tüm kuvvetlerin bileşkesi yönündedir.
v
F
v
y
G
yörünge
r
r2
2. yasayı
r1
d
F mv mv veya F G (1)
dt
O
x
şeklinde yazabiliriz, burada G mv parçacığın lineer (doğrusal) momentumu adını alır. (*) bağıntısı şöyle
ifadelendirilebilir. “Parçacığın üzerine etkiyen tüm kuvvetlerin bileşkesi onun lineer momentumunun
zamana göre değişimine (lineer momentumunun zaman türevine) eşittir.” Bu bağıntı parçacığın kütlesi
sabit kaldığı sürece geçerlidir. (1) bağıntısı üç skaler bileşeni cinsinden yazılırsa
, F G
elde edilir.
, F G
Fx G
x
z
z
y
y
Bu skaler formüller birbirinden bağımsız olarak uygulanır.
dG
Şimdi F G
bağıntısının her iki tarafı dt ile çarpılıp sonlu bir zaman aralığında integre edilirse
dt
bileşke kuvvet olan F in parçacığın lineer momentumu üzerindeki etkisi elde edilir.
G2
F
dt
G G 2 G 1 G (2)
t2
t1
G1
Fdt kuvvetin lineer impulsu olarak adlandırılır ve (**) bağıntısı “m kütleli parçacığın üzerindeki toplam
lineer impuls onun lineer momentumundaki değişimine eşittir” şeklinde ifade edlir.
G 2 mv2
Alternatif olarak
m
G1 Fdt G 2
G1 mv1
I
I G
v1
+
=
Fdt
(3)
İmpuls integrali vektörel olup hem yönü hem de şiddeti zamanla değişebilir. Bu durumda bağıntıyı skaler
bileşeniyle yazarsak
2
t2
Fx dt mv x 2 mv x 1 G x 2 G x1 G x
(3a)
Fydt mv y 2 mv y 1 G y G y G y ”
(3b)
t1
t2
2
1
t1
t2
Fz dt mv z 2 mv z 1 G z 2 G z1 G z
(3c)
t1
olup birinin varlığı diğerini gerektirmez. Bu skaler bağıntılar birbirinden bağımsızdır.
Kuvvet, F
Parçacığa etkiyen F’ nin t ile değişimi deneysel yollardan veya yaklaşık
yöntemlerle saptanmışsa grafik veya nümerik integralle ilgili zaman
aralığında F-t eğrisi altında kalan alan impulsu verir. F dt hesaplanırken
parçacığa etkiyen tüm kuvvetler SCD çizilerek hesaba katılmalıdır.
F1
F2
t1
AÇISAL İMPULS VE AÇISAL MOMENTUM
t2
zaman, t
z
Lineer impuls ve lineer momentuma ek olarak ve onlara
benzer bir biçimde açısal impuls ve açısal momentumdan
oluşan bir denklem takımı da vardır. Yukarıdaki m kütleli
parçacık üzerine etkiyen tüm kuvvetlerin sabit bir O
noktasına göre toplam momentleri,
M
o
r F r mv
P(x,y,z) y
Ho= r×mv
(4)
mv
A
r
şeklinde ifade edilebilir. Burada,
d
r mv terimi
r mv
r
m
v r mv
dt
r m r 0
d
r mv r mv
dt
O
x
olur.
mvz
z
Parçacığın açısal momentumu veya lineer
momentumunun O’ ya göre momenti HO’ dur.
H o r mv r G
d
M o dt r mv
d
M
o dt H o
M
H
o o
P(x,y,z)
r
(5)
(6)
(6’)
yörünge
ve
O
mvy
mvx
y
z
x
y
x
3
m parçacığına etkiyen tüm kuvvetlerin O gibi sabit bir noktaya göre olan toplam momenti, O’ ya göre
açısal momentin zaman türevine eşittir. Bu formül rijit veya rijit olmayan parçacıklar sistemine de
genişletilebilen dinamiğin en güçlü formüllerinden biridir.
HO’ nun birimi [HO]=kg. m2/s =N.m.s’ dir.
Açısal momentumun ifadesi de vektörel olduğundan bileşenleri cinsinden skaler olarak şöyle yazılabilir:
Mox H ox
M
oy
M
H
oy
oz
H
oz
Ayrıca açısal momentumun skaler bileşenleri de H o r mv ifadesinin açılımından elde edilebilir:
i
j
k
Ho m x
y
z m yv z zv y i mzv x xv z j m xv y yv x k
vx
vy
vz
H ox myv z zv y
(6’’)
H oz mxv y yv x
H oy mzv x xv z
O’ ya göre toplam momentin parçacığın açısal momentumu üzerine sonlu bir zaman süresince yaptığı etkiyi
elde etmek için M o H o ifadesini t1’ den t2’ ye kadar integre etmek gerekir.
dH o
M o dt
H o 2
t M o dt H dH o
1
o 1
t2
t2
H H
o 2
o 1
H o
veya
r2 mv 2 r1 mv1 H o (7)
M o dt
t
1
toplam açı sal
impuls
açı sal momentumdaki
deg isim
Bu ifade, “m kütleli parçacık üzerine etkiyen toplam açısal impuls, açısal momentumdaki değişime
eşittir” şeklinde belirtilebilir.
Son olarak açısal impuls da vektör nicelik olduğundan bileşenleri itibariyle şu şekilde yazılabilir:
M oxdt H ox 2 H ox 1 myv z zv y 2 yv z zv y 1
(7 a )
M oydt H oy 2 H oy 1 mzv x xv z 2 zv x xv z 1
(7 b )
M ozdt H oz 2 H oz 1 mxv y yv x 2 xv y yv x 1
(7 c)
t2
t1
t2
t1
t2
t1
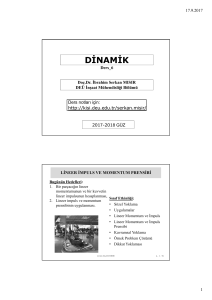
Parçacığın düzlemsel hareketinde bu formüllerin (7a, 7b, 7c) tümü kullanılmaz; çünkü momentler yalnızca
hareket düzlemine dik bir eksene göre alınır (Örneğin x-y düzleminde hareket için z eksenine göre).
4
mv2
r2
Ho2=mv2d2
F
d2
mv1
d1
Bu durumda açısal momentumun şiddeti ve/veya yönü (z, +z
olarak) değişebilir, fakat açısal momentum vektörünün
doğrultusu x-y’ ne dik olarak sabit kalır.
t2
M o dt H o 2 H o 1
Fr sin dt mv 2 d 2 mv 1d1
t1
r1
O
Mo=Frsin
Ho1=mv1d1
MOMENTUMUN KORUNUMU
Belirli bir zaman aralığında parçacık üzerine etkiyen toplam kuvvet sıfır ise ( F 0 ) bu aralıkta parçacığın
lineer momentumu sabit kalır. Aynı sürede parçacık üzerine etkiyen kuvvetlerin sabit bir O noktasına göre
toplam momentleri sıfır ( Mo 0 ) ise bu kez de parçacığın açısal momentumu sabit kalır.
1. durumda lineer momentum, 2. durumda ise açısal momentum korunmuş denir. Lineer momentum
belirli bir eksende korunurken diğerinde korunmayabilir. Benzer biçimde açısal momentum da belirli bir
noktaya göre veya eksene göre korunurken diğerine göre korunmayabilir.
Lineer momentumun korunumu
G 0 G1 G 2
Açısal momentumun korunumu
Ho 0 Ho1 Ho 2
ÇARPIŞMA
İki cismin çok kısa sürede ve oldukça büyük temas
kuvvetleri
doğuracak
biçimde
birbirlerine
çarpışmalarıdır. Hız bileşenlerinin aynı doğrultu ve ters
yönde
oldukları
eksen
çarpışma
eksenidir.
Momentumun korunumu ve sıçrama katsayısı (e)
bağıntıları bu eksende yazılır.
e=1 tam elastik çarpışma
e=0 tam plastik çarpışma
0<e<1 elastoplastik çarpışma
e=1 hem momentum hem de enerji korunur.
e<1 sadece momentum korunur.
v1
y
m1
v1
m1
x
v2
m2
v2
m2
Çarpışma ekseni “y” dir.
(1)
m1(v1y)+ m2(v2y)= m1(v1y)+ m2(v2y)
x eksenindeki hız bileşenleri sabit kalır:
(2)
e
v1x=v1x
v1 y v2 y
v1y v2 y
v2x=v2x
5
ÖRNEK PROBLEMLER
LINEER IMPULS VE LINEER MOMENTUM
Fdt mv mv2 mv1
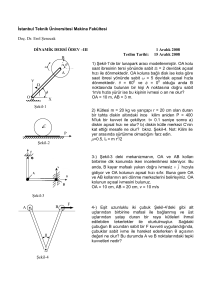
3.177
mv1 Fdt mv2
30 10 3
24000
20 10 3 180 20 10 3 v 2
3.6
v2 6786.7 m/s=24432 km/h
3.179 Fdt mdv
48 10
3
250
R 10 6450
0
3.6
R=3208 N3.21 kN
3.185 mv1 Fdt mv2
200 6 200 1.62 400t dt 2 200 1.62 800 2 200v 2
2
2
2
t2
1200 200 1.62 2 400 952 200v 2
2 0
v2=0.48 m/s
v3 v2 g m t =0.48+1.621=2.1 m/s
3.187
mv1 Fdt mv2
m
4m
g
5
tm
(8)
13
t=3.18 s
AÇISAL IMPULS VE AÇISAL MOMENTUM
3.221 H o r mv 6i 8 j 2 7 sin 30i 7 cos 30 j
x
6
H o 84 0.866k 112 0.5k 128.74k kgm2/s
Ho=mvrsin= 2 7 10 sin( 30 36.87) 128.74 kgm2/s
3.222 v 4cos 45i sin 45 j 2 2i 2 2 j
G mv 3 2 2i 2 2 j 6 2i 6 2 j kgm/s
H o r mv i 3 j 6 2i 6 2 j 6 2k 6 6k 23.18k kgm2/s
T
1 2 1
mv 3 4 2 24 joule
2
2
3.223 H o r mv ai bj ck mvj amvk cmvk mv ci ak
H o M o r ma r F ai bj ck Fk aFj bFi F bi aj
2mr
H o 2 H o1 0
H 0
3.231
o
r 2m2r 2r 0
1
T 2 mr
2
2
o
o / 4
2
1 o
2 2 3
2 2 m 2r 4 mr o 4
3 2 2
mr o
T 4
3
n
2 2
T
4
mr o
3.234 i )
t 2 0.5
0.5
t1 0
0
Fr sin dt mv2 d 2 mv1 d1
M o T mv B d B v A d A
Mo
M o dt mv2 d 2 mv1d1
0.026 0.18 cos 30 4 0.09 sin 30
0.0302 Nm
0.5