Biz şimdiye kadar hangi uzaylar ile uğraştık:
* Lineer vektör uzayları
V
* Normlu uzaylar (Banach uzayı)
V, .
* İç çarpım uzayları (Hilbert uzayı) V , . , .
Hep Rn’ deydik fonksiyon uzayında neler oluyor
acaba?
Önce R∞ ’a dikkat edelim: Nasıl vektörlerden oluşuyor?
Sonsuz bileşenli vektörlerden
v1
v
2
v3
v .
.
.
.
özel olarak boyu sonlu olanlar ile ilgileneceğiz….
2
v v12 v22 v32 .... ....
lim v
2
1
n
v22 v32 ... vn2 ... c
Boyutu sonsuz olup da boyu sonlu olan vektörlerin
oluşturduğu vektör uzayı …..
Özellikle de ilgilendiğimiz uzayın elemanları [a, b] aralığında
tanımlı fonksiyonlar olsun….
Bu vektörlerin boyunu belirtmek için öncelikle bir
norm tanımlayalım:
b
f ( x) f ( x) dx
2
2
a
Bir de iç çarpım tanımlayalım…..
b
f ( x), g ( x) f ( x) g ( x)dx
a
örnek
Vektörlerinin boyunu bulunuz.
v 1
x
e ,e
x
2, 1
4, 1
8 , .... , f ( x) e x x 0,1
Vektörlerinin bu aralıkta iç çarpımını
belirleyiniz
Böylece tanımladığımız norm ve iç çarpım, iç çarpım ve
normdan beklediğimiz her şeyi sağlıyor
Acaba sonsuz boyutlu fonksiyonlar uzayında sinx ve cos x’den
yararlanarak bir baz tanımlanabilinir mi?
Bu durumda fonksiyonlar x 0,2 aralığında tanımlı sin(kx)’ler
ve cos(kx)’ler olsun k=0,1,2,3,…..
Önce norm tanımına bakalım…..
f ( x)
2
2
2
0
0
2
f ( x) dx
2
sin x dx
Sonra da iç çarpım tanımına……
2
f , g ˆ
f ( x) g ( x)dx
0
2
sin x cos x dx
0
0
Bunlara bakarak ne önerebilirsiniz……..
Fourier Serisi
Jean Baptiste Joseph Fourier (1768-1830)
f ( x), 2 periyotlu bir fonksiyon olsun
f ( x) a0 an cos nx bn sin nx
n 1
f ( x) a0 a1 cos x b1 sin x a2 cos 2 x b2 sin 2 x ....
Nasıl belirleriz?
hatırlatma
Ortonormal bazın bize sağladığı bir kolaylık…..
q1 , q2 ,...., qn V vektör uzayının ortonormal qi
vektörlerinden oluşmuş bir bazı olsun. v V ise
v 1q1 2 q2 ... n qn şeklinde yazılır
i ‘leri
Ortonormal baz işte burada kolaylık sağlayacak
biliyorsak
v 1q1 2 q2 ... n qn
1
0
0
q1 v 1q1 q1 q q2 ... q qn
T
T
1 q1T v
T
2 1
T
n 1
Ortonormal baz!!!
Geçen haftadan ortonormal bazları biliyoruz…..
f ( x) a0 a1 cos x b1 sin x a2 cos 2 x b2 sin 2 x ...
b1 ‘i bulmak için ne önerirsiniz?
f ( x), sin x
0
2
0
2
2
2
0
0
0
a0 sin xdx a1 cos x sin xdx b1 sin 2 xdx a2 cos 2 x sin xdx ....
0
0
2
b1
sin x
0
2
f ( x)dx
sin x sin xdx
0
f ( x), sin x
sin x, sin x
Bir örnek
1
İç çarpım f ( x), g ( x) f ( x) g ( x)dx olarak tanımlanmış
olsun.
1
S
, cos x, cos 2 x, cos 3x, cos 4 x kümesi x ,
2
aralığında ortonormaldir.
S kümesindeki fonksiyonların lineer kombinasyonu olarak
1
9
4
4
sin x’i yazınız. ( sin x cos 4 x cos 2 x )
8
8
Yazdığınız ifadeden yararlanarak aşağıdaki entegralleri
hesaplayınız.
4
sin
x cos xdx,
4
sin
x cos 2 xdx,
4
4
sin
x
cos
3
xdx
,
sin
x cos 4 xdx,
sinüs ve cosinüs’den başka fonksiyonlar yok mu?
Mesela 1,x,x2 bu çok terimliler ile de ortonormal baz
tanımlayabilir miyiz?
Lineer bağımsızlar ancak ortogonal oldukları
bir aralık yok
Nedir bu yol?
Ama ortogonal kılmanın bir yolunu biliyoruz
Gram-Schmidt
aralık [-1,1] ve v1 =1 olsun
Neden bu aralık?
1
1, x x dx 0
1
1
x, x 2 x 3 dx 0
1
hatırlatma
Gram-Schmidt Yöntemi
Ortonormal vektörler kolaylık sağladığına göre
verilen herhangi bir vektör kümesini ortonormal
vektörlere dönüştürebilir miyiz?
Lineer
özelikleri ne?
bağımsız
v1 , v2 ,...., vn verilmiş olsun, nasıl q1 , q2 ,...., qn ‘ları elde ederiz
Doğrultusu v1 ile aynı,
boyu da 1
v1
Kolay olan q1’i bulmak: q1
v1
q2, q1’e dik olmalı:
Bu neye karşı
düşüyor?
vˆ2 v2 q1 v2 q1 V2’nin q1
Peki, neden
çıkarıyoruz
T
doğrultusunda ki
bileşenine
hatırlatma
vˆ2 q1
Ancak ortonormal vektörler kümesine
katılması için boyunun 1 olması gerek
vˆ2
q2
vˆ2
q1,q2 var q3’ü oluşturalım: vˆ3 v3 q1T v3 q1 q2T v3 q2
vˆ3 q1 , vˆ3 q2
vˆ3
q3
vˆ3
Diklik sağlandı birim
olma da sağlanmalı
hatırlatma
Benzer şekilde…..
vˆn vn q v q1 q v q2 ... q v qn 1
vˆn
qn
vˆn
T
1 n
T
2 n
T
n 1 n
Gram-Schmidt’i uygulayalım
v1 1
v2 x
Ortonormaller mi?
v1 v2
1
v3 x
2
1, x 2
1, 1
1
x, x 2
x, x
xx
2
2
x
dx
1
1
1dx
1
x
3
2
1
Legendre çokterimlilerini elde etmiş olduk
1752-1833
Determinant
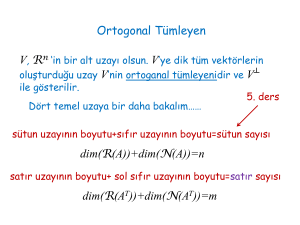
Bir kare matrisin tersinir olup olmadığına dair bilgi veriyor
n- boyutlu uzayda matrisin satırlarından oluşmuş bir
paralel kenarın hacmine ait bilgi veriyor
Pivotlara ilişkin bağıntılar veriyor
Lineer bağımlılıktan
bahsettiğimize göre
sizce bu matrisler
nasıl olacak?
Determinant’ın 10 özelliği
Özellik 1:Determinant birinci satıra lineer bağımlıdır
Üç matris oluşturalım öyle ki ilk satırları farklı diğer
satırları aynı olsun:
kaˆ kbˆ
a kaˆ b kbˆ
a b
B
A
C
d
c d
c
c d
Şimdi neyi göstereceğiz?
?
det C det A det B
√
(a kaˆ)(d ) (c)(b kbˆ)(a)(d ) (b)(c) (kaˆ)(d ) (c)(kbˆ
?
Özellik 2: iki satırın yer değiştirmesi determinantın
işaretini değiştirir
İlk özelikle
beraber bunu
değerlendirince
ilk satır için ne
diyebiliriz?
a b
A
c
d
c d
B
a
b
?
det A det B
ad bc bc ad
Özellik 3: birim matrisin determinantı 1’dir
Özellik 4: iki satır aynı ise determinant sıfırdır
Özellik 5: Elementer satır işlemleri determinantı
değiştirmez.
Dördüncü ve beşinci kurallardan
yararlanarak bu kuralı elde ediniz
Birinci ve dördüncü kurallardan
yararlanarak bu kuralı elde ediniz
Özellik 6: A matrisinin sıfır satırı varsa determinantı
sıfırdır.
Özellik 7: A matrisi üçgen ise A’nın determinantı
köşegenlerin çarpımına eşittir.
a b
A
det A ad
0 d
a 0
ˆ
ˆ ad
A
det
A
c
d
Burada hangi
kurallardan
yararlanırız?
1,3,5 ve 6
Özellik 8: A tekil ise, determinantı sıfırdır. Atersinir ise
determinantı sıfırdan farklıdır.
det A det U d1d 2 d3 ....d n
Özellik 9:
det( AB) (det A)(det B)
(det A)(det A1 ) det( AA1 ) det I
1
1
det A
det A
1
Özellik 10:
det A det A
T
Bunlar için ne diyeceğiz?
PA LDU
det P det A det L det D det U
Ortak özellikleri ne?
AT PT U T DT LT
det AT det PT det U T det DT det LT
Neden?
Bir de P ve PT ‘ye bakalım
det P 1 veya
det P 1
det P det P 1
T
Sonuç:
det A det A
T
veya
Hepsinin
determinantı 1’e
eşit
ayrıca
PP I
T
det P det PT 1