ERZURUM TEKNİK ÜNİVERSİTESİ, MÜHENDİSLİK FAKÜLTESİ
DERS ÖĞRETİM PROGRAMI FORMU
Bölüm Adı
İnşaat Mühendisliği
Ders Kodu
İNM-120
Ders Adı
Statik
Ders Dili
Türkçe
Durumu
Zorunlu
Ön şartlar
Yok
Öğretim Yıl
2014-2015
Tarih
09.02.2015
Dönem/Yıl
Bahar / 1. Sınıf
AKTS Kredisi
5.0
Kredi
Teori
Uygulama
Laboratuar
Sunum
Proje/Alan Çalışması
3
3
-
-
-
-
Öğretim Üyesi
Dr. İlker KAZAZ
Dersin Amacı
İnşaat mühendisliği öğrencilerine vektörel mekaniğin temel prensiplerini basit yapısal
sistemlere uygulama hâkimiyeti kazandırmak. Bu derste Fizik-Mekanik derslerinden farklı
olarak, Newton Mekaniği’nin prensiplerinin gerçekçi problemlere uygulamaları ele alınır.
Böylelikle öğrencilerin mühendislik ihtisas derslerine hazırlanmaları amaçlanır.
Noktasal cisimlerin statiği; Rijit cisimlerin dengesi; Yayılı kuvvetler; Eğri ve alanların
geometrik merkezleri (sentroid); Hacimlerin geometrik merkezi; Yapısal analiz; Mesnet
tepkileri; Düzlem kafesler sistemler; Stabil ve oynak (labil) sistemler; Statikçe
belirsizlik; Çubuk kuvvetlerinin hesaplanması; düğüm noktaları ve kesim yöntemleri;
Çerçeve ve makineler; Kirişler; İç kuvvetler ve iç kuvvet diyagramları; Kablolar;
Sürtünme; Alanların eylemsizlik (atalet) momentleri.
Katalog
İçeriği
Dönemlik Ders Planı
Hafta
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Konular
Giriş, Mekaniğin temel kavram ve ilkeleri, Birim sistemleri, Genel Analiz Yöntemi, Sayısal hassasiyet
Skalerler ve Vektörler, Vektörel işlemler, Kuvvetlerin vektörel toplamı, Düzlemsel kuvvetlerin toplanması,
Kartezyen vektörler; Konum vektörleri, Bir doğru boyunca yönelen kuvvet vektörü, Skaler çarpım
Noktasal cismin dengesi, Serbest cisim diyagramı, Düzlemsel kuvvet sistemleri, vektörel çarpım, Bir
kuvvetin bir noktaya ve bir eksene göre momenti, Momentler ilkesi, Kuvvet çifti ve momenti, Kuvvetin
rijit cisim üzerinde kaydırılması, Kuvvet ve kuvvet çifti sisteminin bileşkesi, Basit yayılı yüklerin bileşkesi
Rijit cismin dengesi, Rijit cisim denge şartları, iki boyutta denge, İki boyutta mesnet tepkileri, Denge
denklemleri, Üç boyutta denge, Üç boyutta mesnet tepkileri, Denge denklemleri, Statikçe belirsizlik
Basit kafes sistemler, Stabil ve oynak sistemler, Statikçe belirsizlik, Düzlem kafes sistemlerin çözüm
yöntemleri, Düğüm noktaları yöntemi, Sıfır kuvvet çubukları, Kesim yöntemi
Bileşik ve karmaşık kafes sistemler, Çerçeveler ve makineler
İç kuvvetler, Normal kuvvet, Kesme kuvveti, Eğilme momenti
Kesme kuvveti ve eğilme momenti denklemleri ve diyagramları, Yayılı yük, kesme kuvveti ve moment
arasındaki bağıntılar
Kablolar, Tekil yüklere maruz kablolar, Yayılı yüke maruz kablolar, Kendi ağırlığına maruz kablolar
Parçacık sisteminin ağırlık ve kütle merkezi, Bir cismin ağırlık merkezi, kütle merkezi ve Geometrik
merkezi
Bileşik cisimlerin geometrik merkezlerinin belirlenmesi, Genel yayılı kuvvet sisteminin bileşkesi, Akışkan
basıncı
Alan eylemsizlik momentlerinin tanımı, Kutupsal eylemsizlik momenti, Eylemsizlik yarıçapı, Alan
eylemsizlik momentinin integralle bulunması, Paralel eksen teoremi, Bileşik alanların eylemsizlik
momentleri
Alanın çarpım eylemsizlik momenti, Paralel eksen teoremi, Alanın eğik eksenlere göre eylemsizlik
momentleri
Kuru sürtünmenin özellikleri, Sürtünme açısı, Kamalar, Düz kayışlarda sürtünme kuvvetleri, Yuvarlanma
direnci
Ders Kitabı
1.
Yardımcı Kitaplar
1.
2.
Mühendislik Mekaniği: Statik (Metrik 2. Baskı), R.C. Hibbeler, S.C. Fan, Çevirenler:
A. Soyuçok, Ö. Soyuçok, Literatür Yayınları, İstanbul, 2007.
Mühendisler için Mekanik: Statik, F. Beer, R. Johnston, Çevirenler: Ö. Gündoğdu,
H.R. Öz, O. Kopmaz, Güven Yayınevi, İzmir, 2007.
Mühendisler için Mekanik: Statik ve Mukavemet, M.H. Omurtag, Nobel Yayın
Dağıtım, İstanbul, 2007.
Değerlendirme
Ölçütleri
Adet
Ara Sınavlar
Kısa Sınavlar
Ödevler
Projeler
Dönem Ödevi
Laboratuar
Diğer
Dönem Sonu Sınavı
Yüzde (%)
2
3
4
1
50
10
40
İçerik Ağırlıkları
Yüzdesi (%)
Matematik ve Temel Bilimler
Mühendislik Bilimleri
Mühendislik Tasarımı
Sosyal Bilimler
Ders Çıktıları
(Kazanımlar)
Ders tamamlandığında öğrenci:
• Basit yapısal sistemlerin (kafes, kiriş, kablo) mesnet tepkilerini ve iç kuvvetleri
hesaplayabilir.
• Statik ve kinematik sürtünmeyi birbirinden ayırır ve sürtünme kuvvetlerini hesaplar.
• Verilen bir bileşik alanın geometrik merkezini bulur ve bulduğu geometrik merkeze
göre eylemsizlik momentlerini hesaplar.
• Geometrik merkezden geçen eksenlere göre eylemsizlik momentleri bilinen bir alanın
bir başka bir eksen takımına göre eylemsizlik momentlerini hesaplamak için paralel
eksen teoremini uygular.
• Asal eylemsizlik momentlerini hesaplar.
1. Kavramsal ve Uygulama Becerileri: Mekaniğin temel prensiplerini kullanarak basit
statik problemlerini analiz edebilme becerisi.
2. Kişisel Gelişim: Problemleri sistematik çözme alışkanlığı kazandırmak.
3. Analitik ve Hesaplama Becerileri: Tek değişkenli matematiksel analiz yöntemlerini
(türev, integral) uygulama becerileri.
Dersin Hedefleri
50
50
-
Dersin program çıktıları ile olan ilişkisi
1
2
3
Program çıktıları
Matematik, Fen bilimleri ve mühendislik temel bilgilerinin İnşaat Mühendisliği problemlerine
uygulayabilme becerisi.
Deney tasarlama, deney yapma ve deney sonuçlarını analiz etme ve yorumlama becerisi
İstenen gereksinimleri karşılayacak biçimde bir sistemi, parçayı ya da süreci tasarlama becerisi
1
3
x
x
x
4
5
6
7
8
Tek ve çok disiplinli takım çalışması yürütme becerisi.
Mühendislik problemlerini belirleme, tanımlama, tasarlama, analiz etme ve çözme becerisi.
Mesleki ve etik sorumluluk bilinci
Sözlü ve yazılı etkin iletişim kurma becerisi.
Mühendislik çözümlerinin, evrensel ve toplumsal boyutlardaki etkilerini anlamak için gerekli
genişlikte eğitim
9
Öğrenmenin sürekliliğinin önemini benimsemiş olarak, bilim ve teknolojideki gelişmeleri
izleyerek kendisini sürekli yenileme becerisi.
Çağın sorunları ve çağdaş konular hakkında bilgi
Mühendislik uygulamaları için gerekli olan teknikleri, teknolojileri ve modern araçları kullanma
becerisi.
x
12
Mühendislik problemlerinin çözümlenmesinde sağlık, güvenlik ve çevre üzerinde yaratacağı
ulusal ve uluslararası etkilere duyarlılık.
x
13
Özgüveni yüksek ve kendi kendine öğrenebilme becerisi
10
11
2
x
x
x
x
x
x
x
x
Dersin Katkısı: 1:Hiç 2:Kısmi 3:Tümüyle
İNM120- Güz 2014
ÖDEV #...
SOYAD, Ad
Teslim tarihi
1.5 cm
o
Zımba Teli (45 açıyla)
İNM – 120 STATİK
ÖDEV HAZIRLAMA KILAVUZU
1/a
a: Toplam sayfa
sayısı
Ev ödevlerinin bir diğer önemli amacı da öğrenciye eldeki probleme mühendislik
formatına uygun bir çözüm hazırlama ve bunu anlaşılacak bir şekilde sunma becerisi
kazandırmaktır.
1.5 cm
ÖDEVLERİNİZİ AŞAĞIDAKİ KURALLARA GÖRE HAZIRLAYINIZ:
Verilen tarihten sonra teslim edilen ödevler kabul edilmeyecektir.
A4 kâğıdına ve el yazısı ile kurşun kalemle hazırlayınız.
Çizimlerinizi cetvel yardımıyla yapınız.
Her sayfanın sol üst köşesine ödev numarasını, adınızı, soyadınızı ve numaranızı yazınız.
Ödev kâğıdını temiz ve net bir yazı ile hazırlayınız.
Çözümlerinizde işlem kalabalığından kaçınarak aşağıdaki sırayı takip ediniz.
1. Verilenler (problem #, problem verileri, problemle ilgili bir çizim)
2. Problemde istenen?
3. Çözüm:
a. Çözüm stratejinizi kısaca anlatınız.
b. Tüm sistemin ve/veya parçaların serbest cisim diyagramları
c. Vektörel büyüklükleri toplarken kabul ettiğiniz pozitif yönleri belirtiniz.
d. Formülleri kullanırken, öncelikle alfa-nümerik formda yazınız. Doğrudan sayısal
değerlerle başlamayınız.
e. Sayısal değerleri kullanırken birimlerin uyumlu olduğunu kontrol ediniz.
f. Sonucu kutu içerisine alınız ve birimini mutlaka yanına yazınız!
g. Son olarak, bulduğunuz değer anlamlı mı? Kontrol ediniz.
4. Ödevler temiz, intizamlı ve profesyonel görünümde hazırlanmalıdır. Birkaç yıl sonra
çalışmalarınızı bir mühendis olarak sunacağınızı unutmayınız. Özensiz ödevler 80 p.
üzerinden değerlendirilecektir.
5. Sistematik problem çözme becerisi kazanmanız önemlidir. Ödevlerinizi 3. maddedeki
sıra ile yapınız.
Ödev raporuna ayrıca kapak sayfası yapılmayacaktır.
Ödev herhangi bir dosya veya poşet içerisine yerleştirilmeyecektir.
Bazı önemli puan cezaları:
a. Özensiz hazırlanmış ödevler (okunaksız, işlem kalabalığı, aşırı silinmiş, vs.) (-20 p)
b. 3. maddedeki sıra takip edilmemiş (-20 p)
c. Kullanılan formül yazılmadan sayısal değerler kullanılmış (-10 p)
d. Birimlerde uyumsuzluk (-10 p)
e. Elde edilen sonuç birimi ile verilmemiş (-20 p)
f. Genel
hatlarıyla
yukarıdaki
maddelerin
birçoğuna
uymayan
ödevler
puanlandırılmayacaktır.
g. KOPYA çeken ve veren sıfır (0) alacaktır.
1.5 cm
Mühendislik Mekaniği I‐ Statik
Enginering Mechanics I‐ Statics
Doç.Dr. İlker KAZAZ
BÖLÜM 1: Genel İlkeler
Giriş
• Mekanik Nedir?
• Temel Kavramlar
• İdealleştirmeler
• Newton’un Temel İlkeleri
• Birim Sistemleri
• Sayısal Hesaplar
• Genel Analiz Yöntemi
• Önemli Hususlar
2
Mekanik Nedir?
• Mekanik; dış kuvvetler altında cisimlerin durağan halini veya kuvvet
etkisi altındaki hareket ve deformasyon hallerini inceleyen bilim dalıdır.
• Mekaniğin Dalları:
- Rijit Cisim Mekaniği
- Statik
- Dinamik
- Şekil Değiştiren Cisimler Mekaniği
- Mukavemet
- Akışkanlar Mekaniği
Statik bilim dalı cisimlerin dengesini inceler, yani durmakta olan veya
sabit bir hızda hareket eden cisimleri ele almaktadır.
Dinamik ise cisimlerin ivmeli hareketini inceler.
3
Temel Kavramlar
Uzunluk – uzaydaki bir noktanın konumunu belirlemek ve böylece bir fiziksel
sistemin büyüklüğünü tanımlamak için gereklidir. Standart bir uzunluk birimi
tanımlandığında, mesafeler ve cisimlerin geometrik özellikleri birim uzunluğun
katları olarak tanımlanabilir.
• Zaman – Olayların birbirini takip etmesi olarak düşünülebilir. Ancak statik
ilkeleri zamandan bağımsızdır.
• Kütle – Bir cismin davranışını diğeriyle karşılaştırmak için kullanılan bir madde
özelliğidir. Örneğin, harekete gösterilen direnç (eylemsizlik) ve yer çekiminden
etkilenme gibi.
• Kuvvet – Bir cismin diğeri üzerindeki etkisi (itme veya çekme) olarak
düşünülebilir. Bir kuvvet, uygulama noktası, büyüklüğü, doğrultusu ve yönü ile
karakterize edilir, bu nedenle kuvvet bir vektördür.
•
Newton mekaniğinde, uzay, zaman ve kütle birbirinden etkilenmeyen mutlak
kavramlardır. Buna karşın kuvvet, bu üçünden bağımsız değildir. Cisme etkiyen
kuvvet, cismin kütlesi ve hızının zamana göre değişimine bağlıdır.
4
İdealleştirmeler
Teorinin uygulanmasını kolaylaştırmak amacıyla, mekanikte modeller
ve idealleştirmeler kullanılır.
•
Parçacık – Parçacığın bir kütlesi vardır, boyutları ise ihmal edilebilir.
Örneğin dünyanın boyutları, yörüngesinin boyutları ile
karşılaştırıldığında önemsizdir ve bu yüzden yörünge hareketini
incelerken dünya parçacık olarak modellenebilir.
•
Rijit Cisim – Birbirleri arasındaki uzaklık, bir yük uygulanmasından
önce ve sonra aynı kalan çok sayıdaki parçacığın birleşmesinden
oluşan cisim Rijit Cisim olarak isimlendirilir.
•
Tekil Kuvvet – Bir cisim üzerine tek bir noktada etkidiği varsayılan
yükleme etkisini temsil etmektedir.
5
Newton’un Temel İlkeleri
Rijit cisim mekaniği konularının tamamı, geçerliliği gözleme
dayanan Newton’un üç hareket kanunu esas alınarak formüle
edilir.
• Newton’un 1. Kanunu – Başlangıçta durgun halde olan veya
sabit hızla bir doğru boyunca hareket eden bir parçacık,
dengeyi bozan herhangi bir kuvvet etki etmedikçe, bu
konumunu korur.
6
Newton’un Temel İlkeleri
• Newton’un 2. Kanunu – Başlangıçta durgun halde olan veya
sabit hızla bir doğru boyunca hareket eden bir parçacığa,
dengeyi bozan herhangi bir kuvvet etki etmesi halinde,
parçacık kuvvetle aynı doğrultuda ve büyüklüğü kuvvetle
doğru orantılı olan bir a ivmesi kazanır. Bu kanun
matematiksel olarak F=ma şeklinde ifade edilir.
m
7
Newton’un Temel İlkeleri
• Newton’un 3. Kanunu – İki parçacık arasındaki etki ve tepki kuvvetleri
aynı büyüklük ve doğrultuda fakat zıt yönlüdür.
• Newton’un Çekim Kanunu – Bu kanun, kütlesi m1 ve m2 olan iki
parçacığın birbirlerini eşit fakat zıt yönlü kuvvetlerle çektiğini ifade
etmektedir.
F G
8
m1m2
r2
W mg
Birim Sistemleri
• Temel birimler (kuvvet, kütle, uzunluk ve zaman) birbirinden
tamamen bağımsız değildirler. Bu birimlerin tümü Newton’un 2.
kanunu ile ilişkilidir. Dolayısıyla bu kuvvet, kütle, uzunluk ve zamanı
tanımlamak için kullanılan birimlerin hiç biri keyfi olarak seçilemez.
• Yukarıdaki temel birimlerden üç tanesi keyfi olarak seçilir, dördüncü
birim diğer üç tanesinden türetilir.
Metrik Sistem: Temel birim olarak uzunluk, zaman ve kuvvet seçilir.
Bu birim sisteminde uzunluk, metre (m) ile, zaman, saniye (s) ile ve
kuvvet, kilogram kuvvet (kgf) ile ölçülmektedir. Kütle ise türetilmiş
birimdir.
m
F
a
1 metrik kütle
1 kgf
1m s
9
Birim Sistemleri
SI Sistemi: Fransızca ‘’Systéme International d’Unités’’ ifadesinin
kısaltmasıdır. Metrik sistemin modern bir versiyonudur. Temel birim
olarak uzunluk, zaman ve kütle seçilir. Bu birim sisteminde uzunluk,
metre (m) ile, zaman, saniye (s) ile ve kütle, kilogram (kg) ile
ölçülmektedir. Kuvvet ise türetilmiş birimdir. Kuvvet birimi Newton
(N)’dur.
kg m
1N 1
s2
10
Sayısal Hesaplar
Mühendislikte yapılan sayısal hesaplardan uygun ve anlamlı sonuçlar
elde edilebilmesi için aşağıdaki hususlara dikkat edilmelidir.
1. Boyut homojenliği
2. Sayıları yuvarlama
3. Hesaplamalar
Boyut homojenliği – Bir matematiksel ifadedeki terimlerin her biri aynı
birim sistemiyle ifade edilmelidir.
•
Bir problemin çözümünün hassasiyeti, verilerin ve işlemlerin hassasiyeti
olmak üzere iki noktaya bağlıdır. Sonuç, bu ikisinden daha doğru veya
yanlış olamaz.
•
Mühendislik problemlerinde veriler nadiren % 0,2’den daha hassas
olarak bilinir. Bu nedenle, “1” ile başlayan değerleri dört diğer sonuçları
üç rakamla yazmak çoğunlukla yeterlidir: 40,2 kg ve 15,58 kg gibi.
11
Genel Analiz Yöntemi
1. Problem dikkatle okunmalı, gerçek durum ile öğrenilen teori
arasında ilişki kurulmalıdır.
2. Gerekli diyagramlar çizilmeli ve problem verisi tablo haline
getirilmelidir.
3. İlgili kurallar matematiksel formda ifade edilmeli ve kullanılmalıdır.
4. Denklemin çözümü mümkün olduğunca cebirsel işlemlerle
yürütülmeli, sonra boyutların homojenliğine bakılmalı, uygun birim
sistemi kullanılarak ve çözüm sayısal olarak tamamlanmalıdır.
5. Elde edilen sonuç, muhakeme ve mantık ile sorgulanarak gerçekçi
olup olmadığı kontrol edilmelidir.
6. Çözüm tamamlandıktan sonra, problem tekrar gözden geçirilmeli,
Aynı sonucu elde etmek için alternatif çözüm yolları araştırılmalıdır.
12
Önemli Hususlar
1. Statik durgun haldeki veya sabit hızda hareket eden cisimleri inceler.
2. Parçacığın bir kütlesi vardır, fakat boyutları ihmal edilebilir.
3. Rijit bir cisim yük altında şekil değiştirmez.
4. Tekil kuvvetin cismin tek bir noktasına etki ettiği kabul edilir.
5. Newton’un hareket kanunları asla unutulmamalıdır.
6. Kütle maddenin değişmez bir özelliğidir.
7. Ağırlık, dünyanın bir cisim üzerindeki yerçekimi kuvvetidir. Büyüklüğü
kütlenin konumuna bağlıdır.
8. SI birim sisteminde kuvvet birimi Newton’dur. Bu birim kütle, uzunluk
ve zamandan türetilmiştir.
9. Bütün matematiksel ifadelerde boyut homojenliği sağlanmalıdır.
13
BÖLÜM 2: Kuvvet Vektörleri
Giriş
• Skalerler ve vektörler • Vektörel işlemler
• Kuvvetlerin vektörel toplamı
• Düzlemsel kuvvetler toplanması
• Kartezyen vektörler • Kartezyen vektörlerde toplama ve çıkarma
• Konum vektörleri
• Bir doğru boyunca yönelen kuvvet vektörü
• Skaler çarpım
1
Amaçlar
• Tekil kuvvet kavramı
• Kuvvetleri toplama, bileşenlerine ayırma ve bir eksen üzerindeki
izdüşümünü alma usulleri.
• Kartezyen vektör formunda kuvvet ve konumun ifade edilmesi
ve kuvvetin büyüklük ve yönünün belirlenmesi
• Vektör cebrinin temel kuralları: toplama, çıkarma, skaler
çarpımla iki vektör arsındaki açının belirlenmesi, bir vektörün
diğeri üzerine iz düşümünün alınması.
2
Tanımlar
• Skaler: Pozitif veya negatif bir sayı ile karakterize edilen bir büyüklüğe
skaler denir. Kütle, hacim ve uzunluk statikte sıkça kullanılan skaler
büyüklüklerdir.
• Vektör: Bir büyüklük ve doğrultuya sahip niceliktir. Statikte sık
kullanılan vektörel büyüklükler konum, kuvvet ve momenttir.
Semboller
Vektörler, bir harfin üstüne ok veya yatay çubuk koyarak, veya koyu harfle gösterilir (kitaplarda), A. Vektörlerin sembolik gösterimi
veya
Vektörün büyüklüğü ise
veya
3
veya sadece
Vektörel tanımlar
Etki çizgisi
Uç
Başlangıç
4
Vektörün skaler ile çarpımı
A vektörü ve vektörün negatifi
Skaler çarpım ve bölüm
5
Vektörlerin toplamı
Paralelkenar kuralı Aynı doğru üzerindeki vektörlerin toplamı
Üçgen oluşturma
6
Vektörlerin farkı
Paralelkenar kuralı Üçgen oluşturma
7
Vektörlerin bileşenlere ayrılması
Bileşke
Bileşenler
R’ nin ucundan başlayarak , a ve b’yi kesinceye kadar b ve a’ya paraleller çizilir.
8
Trigonometrik bağıntılar
Sinüs kuralı: Cosinüs kuralı: 9
KUVVET
1. Kuvvet vektörel bir büyüklüktür.
2. Kuvvetler vektör gibi toplanabilir.
10
11
Paralel kenar kuralı
• Paralel kenar kuralını kullanarak vektör toplamını gösteren bir
şekil çiziniz.
• Mümkün oluyorsa, problemin geometrisinden paralel kenarın iç
açılarını belirleyiniz.
• Bilinen ve bilinmeyen kuvvet büyüklükleriyle, bilinmeyen açılar
şekil üzerinde isimlendirilir.
• Bileşenlerin üçgensel uç‐başlangıç toplamını görselleştirmek için
oluşturulan paralelkenarın yarısını yeniden çiziniz.
12
Önemli noktalar:
• Skaler pozitif veya negatif bir sayıdır.
• Kuvvet büyüklüğü, doğrultusu ve yönü olan bir niceliktir.
• Bir vektörün bir skalerle çarpımı veya bölümüyle büyüklüğü
değişir. Skaler negatifse yönü de değişir.
• Eğer kuvvet vektörleri aynı doğrultuda ise bileşke kuvvet
cebirsel veya skaler toplamayla elde edilebilir.
13
Örnek 2-1: Şekildeki kanca F1 ve F2 kuvvetlerine maruzdur. Bileşke kuvvetin büyüklüğü ve doğrultusunu belirleyiniz.
Vektörel gösterim ve geometrinin belirlenmesi
Çözüm aşamaları:
• FR bileşke kuvveti cosinüs kuralı ile bulunur.
• açısı sinüs kuralıyla bulunur.
14
• Açı = + 150
Paralel kenar kuralı:
B
C
Açıların hesaplanması:
COA Açısı = 90o -15o-10o = 65o
OAB Açısı = [360o -2(65o)]/2 = 115o
A
O
Üçgen kurulumu
FR (100) 2 (150) 2 2(100)(150) cos1150
FR 10000 22500 30000( 0.4226)
FR 212.6N 213N
15
Sinüs teoremi:
150
212.6
sin sin1150
150
sin
(0.9063) 0.6394
212.6
sin 1 (0.6394) 39.750 39.80
150
54.80
Cevap: Bileşke kuvvetin büyüklüğü 213 N, yataydan ölçülen doğrultusu 54.8o dir.
16
Örnek 2-2: Kablodaki 200 kN’ luk kuvveti x ve y doğrultusunda ve x’ ve y doğrultusundaki bileşenlerine ayırınız.
kN
200 kN’ luk kuvveti x ve y doğrultusunda ve x’ ve y doğrultusundaki bileşenlerine ayırınız.
17
Çözüm – x ve y doğrultusu
Paralelkenar kuralı
Üçgen kurulumu
F Fx Fy
Fx (200 kN) cos 40o 153kN
18
Fy (200 kN) sin 40o 129 kN
Örnek 2-2
Çözüm – x’ ve y doğrultusu
Üçgen kurulumu
Paralelkenar kuralı
F Fx Fy
Fx'
sin 50 0
Fy
sin 70 0
200
sin 60 0
200
sin 60 0
19
sin 500
177 kN
Fx' 200
sin 600
sin 700
Fy 200
217 kN
sin 600
Düzlemsel kuvvetlerin toplanması
F Fx Fy
20
F Fx Fy
Düzlemsel
Kartezyen
vektörkuvvetlerin
gösterimi: toplanması
vektörel
F Fx ˆi Fy ˆj
skalar
21
Düzlemsel
Kartezyen
vektörkuvvetlerin
gösterimi: toplanması
F Fxˆi Fy ˆj
F Fxˆi Fyˆj
22
Düzlemsel kuvvetlerin bileşkesi
F1 F1x ˆi F1y ˆj
F2 F2x ˆi F2y ˆj
F3 F3x ˆi F3y ˆj
23
Düzlemsel kuvvetlerin bileşkesi
Bileşenlerin toplanması:
FR
FR
FR
FR
FR
F1 F2 F3
F1x ˆi F1yˆj F2x ˆi F2yˆj F3x ˆi F3yˆj
F1x ˆi F2x ˆi F3x ˆi F1yˆj F2yˆj F3yˆj
F1x F2x F3x ˆi F1y F2y F3y ˆj
FRx ˆi FRyˆj
FRx F1x F2x F3x
FRy F1y F2 y F3y
24
Düzlemsel kuvvetlerin bileşkesi
FRx Fx
FRy Fy
2
2
FR FR FRx
FRy
tan
25
26
1
FRy
FRx
Özel üçgenler
5 32 42
5
3
4
4
3
0.8 sin 0.6
5
5
3
4
cos 0.6 cos 0.8
5
5
cos
13
5
12
13 52 122
12
5
cos
sin
13
13
5
12
cos
cos
13
13
27
Örnek 2-7: Şekildeki halkaya F1 and F2 kuvvetleri uygulanmaktadır. Bileşke kuvvetin büyüklüğünü ve doğrultusunu belirleyiniz.
Serbest Cisim Diyagramı (SCD)
28
Skaler Çözüm:
FR x Fx
FR x 600 cos 30o N 400sin 45o N 236.8 N
FR y Fy
FR y 600sin 30o N 400 cos 45o N 582.8 N
582.8 N
o
tan 1
67.9
236.8 N
29
Kartezyen Vektörel Çözüm:
F1 600cos 30o ˆi 600sin 30o ˆj N
F2 600cos 30o ˆi 600sin 30o ˆj N
FR F1 F2
600cos 30o ˆi 600sin 30o ˆj N 600cos 30o ˆi 600sin 30o ˆj N
FR 236.8iˆ 582.8jˆ N
30
Sağ el kuralı:
k̂
î
ĵ
31
Bir vektörün dik bileşenleri
A Ax A y Az
32
Birim Vektör: Büyüklüğü 1 olan vektör
A
û A
A
veya
A Aû A
Kartezyen birim vektörler
Koordinat eksenleri doğrultusundaki birim vektörler:
î
x-doğrultusundaki birim vektör
ĵ
y-doğrultusundaki birim vektör
k̂
z-doğrultusundaki birim vektör
Koordinat eksenleri doğrultusundaki birim vektörler
33
Kartezyen Vektör Gösterimi
A Ax ˆi Ay ˆj Az kˆ
34
Kartezyen vektörün büyüklüğü
Büyüklük
A
A2 Az 2
A
Ax 2 Ay 2
A
Ax 2 Ay 2 Az 2
35
Kartezyen vektörün doğrultusu
, , koordinat doğrultu açıları.
Bu açılar A ile referans eksenleri
arasındaki açılardır.
Bu açıların kosinüsleri doğrultu
kosinüsleri olarak adlandırılır.
36
Kartezyen vektörün doğrultusu
Doğrultu kosinüsleri
Ax
cos
A
cos
Ay
A
cos
Az
A
37
Kartezyen vektör
A vektörü
A Ax ˆi Ay ˆj Az kˆ
Doğrultusu ve yönü A vektörü ile aynı olan birim vektör, uA:
Ay ˆ Az ˆ
A A
û A x ˆi
j
k
A
A
A
A
û A cos ˆi cos ˆj cos kˆ
Önemli Bağıntı
û A cos ˆi cos ˆj cos kˆ
cos 2 cos 2 cos 2 1
38
Kartezyen vektör
A A uˆ A
A Acos ˆi Acos ˆj Acos kˆ
A A ˆi A ˆj A kˆ
x
y
z
39
Kartezyen vektörlerde toplama ve çıkarma
A Ax ˆi Ay ˆj Az kˆ
B Bx ˆi By ˆj Bz kˆ
R AB
R Ax Bx ˆi Ay By ˆj Az Bz kˆ
R A B
40
R Ax Bx ˆi Ay By ˆj Az Bz kˆ
Aynı noktadan geçen kuvvet sistemleri
Aynı bir noktadan geçen çok sayıdaki kuvvetin oluşturduğu bir sisteme vektörel toplama aşağıdaki gibi uygulanır.
FR F Fx ˆi Fy ˆj Fz kˆ
41
Örnek 2-13: Şekildeki kancaya iki kuvvet etki etmektedir. F2’nin kuvvet doğrultu açılarını FR bileşke kuvveti pozitif y ekseni boyunca etkiyecek ve büyüklüğü 800 N olacak şekilde belirleyiniz?
FR F1 F2
FR = 800 N
F1 için
42
1 45o 1 60o 1 120o
F1 F1 cos 1ˆi F1 cos 1ˆj F1 cos 1kˆ
F1 300 N cos 45o ˆi 300 N cos 60o ˆj 300 N cos120o kˆ
F1 212.2ˆi 150ˆj 150kˆ N
F1 212.2iˆ 150ˆj 150kˆ N
F2 F2x ˆi F2y ˆj F2z kˆ
FR 800ˆj N
FR F1 F2
800ˆj 212.2iˆ 150ˆj 150kˆ F2x ˆi F2y ˆj F2z1kˆ
800ˆj 212.2 F2x ˆi 150 F2y ˆj 150 F2z kˆ
FRx 212.2 F2x 0 F2x 212.2N
FRy 150 F2y 800 F2y 650N
FRy 150 F2z 0 F2z 150N
43
F2 kuvvetinin büyüklüğü (kontrol):
F2 212.2iˆ 650ˆj 150kˆ N
212.2
2
650 150 700N
2
2
F2 kuvveti doğrultu açıları:
212.2
212.2
o
α 2 cos 1
108
700
700
650
650
o
2 cos 1
cosβ 2
21.8
700
700
cos α 2
cos γ 2
44
150
700
150
o
2 cos 1
77.6
700
Konum vektörleri
A(4,2,‐6)
B(0,2,0)
C(6,‐1,4)
45
Konum vektörleri
Koordinatlar
1. Sağ el koordinat sistemi
2. Pozitif z ekseni yukarı doğru
Kartezyen vektör formu
46
r xˆi yˆj zkˆ
Konum vektörleri
Bağıl Konum Vektörü
rA rAB rB rAB rB rA
r rAB (xB xA)iˆ ( yB yA)jˆ (zB zA)kˆ
47
Konum vektörleri
Bir Doğru Boyunca Yönelen Kuvvet Vektörü:
1. Halatlar
2. Kablolar
3. Zincirler
48
Konum vektörleri
49
Kuvvet, konum ve birim vektör
r
F Fuˆ F
r
50
Örnek 2-13: Resimdeki adam ipi 70 N’luk bir kuvvet uygulayacak
şekilde çekmektedir. A mesnedine etki eden kuvveti kartezyen vektör
formunda ifade edin ve doğrultusunu belirleyin.
rAB (x B -x A )ˆi (yB -y A )ˆj (z B -z A )kˆ
İlgili noktaların koordinatlarını belirleyin
A 0, 0,30 m
B 12, 8, 6 m
A dan B’ye uzanan konum vektörünü yazalım
rAB (12 0)iˆ ( 8 0)jˆ (6 30)kˆ
rAB 12iˆ 8jˆ 24kˆ ft
A dan B’ye uzanan birim vektör
rAB 12iˆ 8jˆ 24kˆ m
rAB
û AB
12 2 8 2 24 2
28m
rBA
1
3
2
6
12iˆ 8jˆ 24kˆ ˆi ˆj kˆ
rBA 28
7
7
7
Kuvvetin vektör formunda yazımı:
2
6
3
F Fuˆ AB 70 N ˆi ˆj kˆ
7
7
7
F 30iˆ 20jˆ 60kˆ N
Örnek 2-17: Kablolar şekilde gösterildiği gibi A’daki halkaya FAB=100 N ve FAC= 120 N kuvvetleri uygulanmaktadır. A da etkiyen bileşke kuvvetin büyüklüğünü hesaplayınız?
A
B
C
53
Konum Vektörü:
rA 4kˆ
ˆ
rB 4i rC 4iˆ 2ˆj
rAB rB rA 4iˆ 4kˆ m
ˆ
rAC rC rA (4iˆ 2ˆj 4k)m
rAB 42 (4) 2 5.66m
rAC 42 22 (4) 2 6m
Birim Vektörler:
54
û AB
r
4 ˆ
4 ˆ
AB
i
k
rAB 5.66 5.66
û AC
r
2 4
4
AC ˆi ˆj kˆ
rAC 6
6 6
Kuvvet Vektörleri:
Örnek 2-17
FAB 100N uˆ AB 70.7iˆ 70.7kˆ N
FAC 120N uˆ AC 80iˆ 40ˆj 80kˆ N
Bileşke kuvvet:
FR FAB FAC
FR 70.7iˆ 70.7kˆ N 80iˆ 40ˆj 80kˆ N
FR 150.7iˆ 40ˆj 150.7kˆ N
Bileşke kuvvetin büyüklüğü: FR (150.7) 2 (40) 2 (150.7)2 217N
55
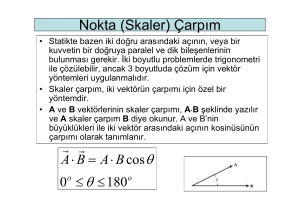
Skaler Çarpım
A B AB cos
0o 180 o
1.
2.
3.
4.
Skaler sonuç veren vektör çarpımıdır.
A B olarak yazılır. “A nokta B” olarak okunur.
A vektörünün büyüklüğü çarpı B vektörünün büyüklüğü, çarpı iki vektör arasında açının cosinüsü şeklinde hesaplanır. İki vektör arasındaki açıyı verir
56
1 A B
cos
A B
Skaler Çarpım
İşlem kuralları:
•Değişme özelliği (Komütatiflik)
A B B A
•Skaler çarpım
a(A B ) aA B A aB (A B )a
•Dağılma kuralı
A (B D) (A B) (A D)
57
Kartezyen birim vektörlerin skaler çarpımı
ˆi ˆi 1
ˆj ˆj 1 cos0o 1
kˆ kˆ 1
ˆi ˆj ˆj ˆi 0
ˆi kˆ kˆ ˆi 0 cos90o 0
ˆj kˆ kˆ ˆj 0
58
Kartezyen vektörlerin skaler çarpımı
ˆ ( B ˆi B ˆj B k)
ˆ
A B ( Ax ˆi Ay ˆj Az k)
x
y
z
Ax Bx ˆi ˆi Ax By ˆi ˆj Ax Bz ˆi kˆ
Ay Bx ˆj ˆi Ay By ˆj ˆj Ay Bz ˆj kˆ
Az Bx kˆ ˆi Az By kˆ ˆj Az Bz kˆ kˆ
A B Ax Bx Ay By +Az Bz
Skaler çarpım (nokta çarpım) skaler sonuç verir!!!
59
A B Ax Bx ˆi Ay By ˆj+Az Bz kˆ
Şişersin!!!!
A B Ax Bx Ay By +Az Bz
Skaler çarpımın uygulamaları
İki vektör arasındaki açının bulunması
1 A B
cos
A
B
0o 180o
Eger A B 0
cos 1 0 90o
AB
61
Skaler çarpımın uygulamaları
Bir vektörün bir doğruya paralel bileşeni
A= A·uˆ
A = A·uˆ uˆ
62
Bir vektörün bir doğru üzerindeki izdüşümü
A= A·uˆ
A A A
A =A A
A = A·uˆ uˆ
A2 A2 A2
A = A2 A2
63
Örnek 2-18: Şekilde gösterilen çerçeveye F kuvveti etkimektedir. Bu kuvvetin, AB elemanına paralel ve dik bileşenlerini belirleyiniz.
1. AB doğrultusunda birim vektörü hesapla,
û AB
1.F vektörünün AB doğrulsundaki bileşeninin
büyüklüğünü (izdüşümünü) bulmak için skaler
çarpımla FAB F uˆ AB hesapla
F
2. AB FAB .uˆ AB
3. F F F kullanarak dik bileşende
hasapalanır.
Birim vektör:
rAB
2iˆ 6ˆj 3kˆ
û AB
2
2
2
rAB
2 6 3
2ˆ 6ˆ 3 ˆ
i j k
7
7
7
0.286 ˆi 0.857ˆj 0.429kˆ
û AB
64
û AB
Skaler çarpım:
F uˆ AB
FAB
F 300 ˆj N
û AB 0.286 ˆi 0.857ˆj 0.429kˆ
FAB F uˆ AB 0 0.286 300 0.857 0 0.429
FAB 257.1N
Paralel bileşen:
FAB FAB uˆ AB 257.1N 0.286 ˆi 0.857ˆj 0.429kˆ
FAB 73.5 ˆi 220ˆj 110kˆ N
65
Dik bileşen:
F 300jˆ N
F FAB 73.5 ˆi 220jˆ 110kˆ N
F F F
F F F 300jˆ N 73.5 ˆi 220jˆ 110kˆ N
F 73.5 ˆi 80jˆ 110kˆ N
F
73.5 2 80 2 110 2 N 155 N
or
F F 2 F2
66
Örnek 2-19:Boruya B ucundan F = 80 N kuvveti uygulanmaktadır. F ile borunun BA parçası arasındaki açısını ve F ‘nin BA’ya paralel ve dik bileşenlerinin büyüklüklerini belirleyiniz.
Açının hesaplanaması
m
m
3jˆ 1kˆ m
rBA 2iˆ 2jˆ 1kˆ m
m
rBC
m
F = 80 N
rBA rBC 2 0 2 3 1 1
cos
rBA rBC
3 10
cos 0.7379 42.5o
67
Kuvvet :
Birim vektörler:
rBA 2iˆ 2jˆ 1kˆ m
rBA
2
2
1
û BA
ˆi ˆj kˆ
rBA
3
3
3
rBC 3jˆ 1kˆ m
rBC
3 ˆ
1 ˆ
ûBC
j
k
rBC
10
10
240 ˆ 80 ˆ
F 80 N uˆ BC
j
kN
10
10
F 75.89jˆ 25.30kˆ N
Bileşenler:
2
1
2
FBA F uˆ BA 75.89jˆ 25.30kˆ N ˆi ˆj kˆ
3
3
3
FBA 0 50.6 8.43 59.0 N
68
Bileşenler:
F 75.89jˆ 25.30kˆ N
FBA 0 50.6 8.43 59.0 N
2
54.0 N
F F 2 FBA
69
BÖLÜM 3: Parçacık Dengesi
Giriş
• Parçacık Denge Koşulu
• Serbest Cisim Diyagramı
• Düzlemsel Kuvvet Sistemleri
• Üç Boyutlu Kuvvet Sistemleri
1
Parçacık Denge Koşulu
• Bir parçacık, başlangıçta hareketsizken halen durağan halde
bulunuyorsa veya başlangıçta hareketli iken halen sabit hıza
sahipse dengededir.
• Ancak ‘denge’ veya ‘statik denge’ ifadesi, çoğu zaman
durmakta olan bir nesneyi tanımlamak için kullanılır.
• Denge durumunu korumak için, Newton’un 1. hareket
kanununu sağlamak gereklidir. Bu kanuna göre, bir parçacık
üzerine etkiyen bileşke kuvvet sıfır ise, parçacık dengededir.
• Denge için hem gerekli, hem de yeterli olan bu durum
matematiksel olarak şu şekilde ifade edilir:
F Parçacık üzerine etki eden tüm
F0
2
kuvvetlerin vektörel toplamıdır.
Serbest Cisim Diyagramı
•
Denge denkleminin doğru uygulanabilmesi için, parçacık üzerine etkiyen
bilinen ve bilinmeyen tüm kuvvetler hesaba katılmalıdır.
•
Bunu yapmanın en iyi yolu, parçacığa ait serbest cisim diyagramının
çizilmesidir.
•
Bu diyagram, parçacığı çevresinden soyutlanmış veya ‘serbest’ olarak
gösteren bir şemadır. Bu şemada, parçacık üzerine etkiyen tüm kuvvetleri
göstermek gereklidir. Bu diyagram çizildikten sonra denge denklemini
uygulamak kolaylaşır.
Parçacıkların dengesinde
bulunmaktadır. Bunlar:
a) Yaylar
b) İpler ve Makaralar
sık
karşılaşılan
iki
adet
bağlantı
tipi
3
Serbest Cisim Diyagramı
• Yaylar – Mesnet olarak lineer elastik bir yay kullanılıyorsa,
yayın uzunluğu, üzerine etkiyen kuvvet ile doğru orantılı olarak
değişir. Yayların elastikliğini tanımlayan bir özellik k yay sabiti
ve yüksüz konumdan s mesafesi kadar deforme edilmiş
(uzatılmış veya sıkıştırılmış) lineer elastik bir yayda oluşan
kuvvetin büyüklüğü
F k s
F
lineer
nonlineer
k
s
4
Serbest Cisim Diyagramı
• İpler ve Makaralar – İplerin ihmal
edilebilir bir ağırlığa sahip olduğu ve
uzayamaz olduğu varsayılmaktadır.
İpler sadece çekme kuvvetini
taşıyabilir ve bu kuvvet daima ip
doğrultusundadır.
Makaralar ise sürtünmesiz olarak
kabul edilmektedir. Sürtünmesiz bir
makara üzerinden geçen sürekli bir
ipin dengede kalabilmesi için, ipte
oluşan kuvvetin büyüklüğünün sabit
olması gerekmektedir.
5
Serbest Cisim Diyagramı
• Serbest Cisim Diyagramının Çizilmesi:
a) Parçacığın, çevresinden soyutlandığını veya ‘serbest’ kaldığı kabul edilmeli ve cismin genel hatları çizilmelidir.
b) Bu çizim üzerinde, parçacık üzerine etkiyen bütün kuvvetler belirtilmelidir. c) Cisme etki eden bütün dış kuvvetler serbest cisim gösteriminde
belirtilmelidir. Bilinen dış kuvvetlerin şiddetleri ve doğrultuları
diyagramda açıkça ifade edilmelidir.
d) Bilinmeyen kuvvetler de cismin diyagramı üzerinde belirtilmelidir. Bu
kuvvetler genellikle zemin ve diğer cisimlerin, parçacığın muhtemel
hareketine engel olan tepkilerdir.
e) Serbest cisim diyagramı üzerinde boyutlar da gösterilmelidir.
6
Serbest Cisim Diyagramı
7
Serbest Cisim Diyagramı
• Örnek: Şekildeki küre 6 kg kütlelidir ve gösterildiği şekilde
tutulmaktadır. Kürenin ve C’deki düğümün serbest cisim diyagramını
çiziniz.
8
Serbest Cisim Diyagramı
Küre
FCE
58.9 N
9
Serbest Cisim Diyagramı
C düğümü
FCBA
60o
FCD
C
10
FCE
CE ipi
FEC
C
E
FCE
İpe etkiyen iki kuvvet vardır. Bunlar kürenin ağırlığından kaynaklanan
küre kuvveti ve ilmek kuvvetidir. İpler ve kablolar sadece çekmeye
çalışan elemanlardır. Newton’un 3. Kanunu geçerlidir.
Verilen sistemlerin SCD lerini çiziniz
Düzlemsel Kuvvet Sistemleri
• İki boyutlu bir kuvvet sistemidir.
• Genelde x – y düzlemi kullanılır.
• i ve j birim vektörleri ile gösterilir.
F 0
Fx ˆi Fy ˆj 0
14
Düzlemsel Kuvvet Sistemleri
Fx ˆi Fy ˆj 0
Bu vektörel denklemin sağlanabilmesi için kuvvetin x ve y
bileşenlerinin sıfıra eşit olması gerekmektedir. Kısaca
Fx 0
Fy 0
Bu skaler denge denklemleri, parçacık üzerine etkiyen bütün
kuvvetlerin x ve y bileşenlerinin cebirsel toplamlarının sıfıra eşit
olduğunu ifade etmektedir. Bu denklemlerle en fazla iki
bilinmeyen hesaplanır.
15
Düzlemsel Kuvvet Sistemleri
Analizde İzlenecek Yol
Serbest Cisim Diyagramı
1. x ve y eksenleri uygun bir şekilde yerleştirilerek diyagram çizilir.
2. Bilinen ve bilinmeyen tüm kuvvet büyüklükleri diyagram üzerine
yerleştirilir.
3. Bilinmeyen büyüklüğe sahip kuvvetin yönü keyfi olarak seçilebilir.
Denge Denklemleri
1. Denge denklemleri uygulanır.
Fx
0 ve
Fy 0
2. Uygulamada, bileşenler, pozitif eksenler yönünde ise pozitif, negatif
eksenler yönünde ise negatiftir.
3. Eğer bilinmeyen kuvvetin değeri negatif çıkarsa, bu durum kuvvetin
aslında diyagramda gösterilenin tam tersi yönde olduğunu gösterir.
16
Örnek: Şekilde gösterilen 250 kg’lık
motorun dengede olması için AB ve AD
iplerindeki kuvvetleri hesaplayınız.
•Problemi çözmek için A noktası için denge denklemi uygulanmalıdır. Çünkü parçacık AB ve AD iplerinin uyguladığı kuvvetlere maruzdur. Serbest Cisim Diyagramı
y
TAB
A
30o
TAD
Motorun ağırlığı W = 250 kg (9,81 m/s2) = 2,452 kN
x
Dolayısıyla AC ipindeki kuvvet de 2,452 kN’dur.
TAC = 2.452 kN
17
y
TAB
A
30o
TAD
x
TA B c o s 3 0 o TA D 0
TAC = 2.452 kN
Çözüm:
o
TAB sin 30 2.452kN 0
TAB sin 30o 2.452kN
TAB (0.5) 2.452kN
Fx 0
Fy 0
T A B sin 3 0 o 2 .4 5 2 k N 0
Çözüm:
TAD TAB cos 30o
TAD (4.904 kN)(0.8660)
TAD 4.247 kN
TAB 4.904kN
18
Sonuçlarımızı 3 dijit
hassasiyete kadar veririz.
TAB = 4.90 kN
TAD = 4.25 kN
Soru: Eğer A çuvalının ağırlığı 20 N ise B çuvalının ağırlığını ve her bir ipteki kuvveti sistem şekilde gösterildiği gibi dengede olacak
şekilde hesaplayanız. Soru: 8 kg’lık lambanın şekilde gösterildiği gibi asılı olması için AC kablosunun boyu ne olmalıdır. AB yayının deforme olmamış boyu
0.4 m ve yay sabiti 300 N/m’dir.
Soru: 20‐kg ağırlığındaki silindiri şekilde verildiği gibi dengede
tutabilmek için AB ve AC iplerindeki gerilme kuvvetleri ne olmalıdır. F=300 N ve d=1 m alınız. Soru: Silindirin kütlesi 20 kg’dır. Eğer F=100 N’luk bir kuvvet şekilde
gösterildiği gibi sağa doğru etkiyecek olursa AC kablosunda gerilme
kuvvetinin sıfır olması için d mesafesinin alabileceği en büyük
değeri hesaplayınız. Soru: 4 kg’lık lambayı şekilde gösterildiği dengede tutabilmek için
uygulanması gereken F kuvvetini ve herbir ipteki kuvveti
hesaplayınız. Soru: Çuval 15 kg’dır. Kablo
kuvvetlerini hesaplayınız. Soru: AB kablosunun ve AC yayının ucuna aşağı yönde 100 N’luk bir
kuvvet uygulanmaktadır. Eğer yayın gerilmemiş boyu 0.6m ise, denge için gereken açısını hesaplayınız. k= 15 N/m alınız. Üç Boyutlu Kuvvet Sistemleri
F 0
F Parçacık üzerine etki eden tüm
kuvvetlerin vektörel toplamıdır.
• Üç boyutlu bir kuvvet sistemidir.
• x, y ve z düzlemi kullanılır.
• i, j ve k birim vektörleri ile gösterilir.
Fx ˆi Fy ˆj Fz kˆ 0
26
Üç Boyutlu Kuvvet Sistemleri
27
Üç Boyutlu Kuvvet Sistemleri
• Bu vektörel denklemin sağlanabilmesi için kuvvetin x, y ve z
bileşenlerinin sıfıra eşit olması gerekmektedir. Kısaca
Fx 0
Fy 0
Fz 0
• Bu skaler denge denklemleri, parçacık üzerine etkiyen bütün
kuvvetlerin x, y ve z bileşenlerinin cebirsel toplamlarının sıfıra
eşit olduğunu ifade etmektedir. Bu denklemlerle bir SCD ile en
fazla üç bilinmeyen hesaplanır.
28
Analizde İzlenecek Yol
Serbest Cisim Diyagramı
1. x ve y eksenleri uygun bir şekilde yerleştirilerek diyagram çizilir.
2. Bilinen ve bilinmeyen tüm kuvvet büyüklükleri diyagram üzerine
yerleştirilir.
3. Bilinmeyen büyüklüğe sahip kuvvetin yönü keyfi olarak seçilebilir.
Denge Denklemleri
1. Denge denklemleri uygulanır.
Fx 0 , Fx 0 ,
ve
Fy 0
2. Uygulamada, bileşenler, pozitif eksenler yönünde ise pozitif, negatif
eksenler yönünde ise negatiftir.
3. Eğer bilinmeyen kuvvetin değeri negatif çıkarsa, bu durum kuvvetin
aslında diyagramda gösterilenin tam tersi yönde olduğunu gösterir.
29
Örnek: Şekildeki O parçacığının dengesi için gerekli olan F kuvvetinin
büyüklüğünü ve doğrultu açılarını belirleyiniz.
Serbest Cisim Diyagramı
30
• Kuvvet vektörleri:
F1 400 ˆj N
F2 800kˆ N
rOB
2 ˆi 3 ˆj 6kˆ
F3 F3
700 N
2
2
2
rOB
2 3 6
F3 2 00iˆ 300 ˆj 600kˆ N
F Fx ˆi Fy ˆj Fz kˆ
• Denge Denklemi:
F
0
F
1 F2 F3 F 0
400 ˆj 800kˆ 2 00iˆ 300 ˆj 600kˆ Fx ˆi Fy ˆj Fz kˆ 0
• Çözüm:
Fx 0 2 00 Fx 0
Fy 0 400 300 Fy 0
Fz 0 800 600 Fz 0
2 00 Fx 0 Fx 200 N
400 300 Fy 0 Fy 100 N
800 600 Fz 0 Fz 200 N
31
F 200 ˆi 100 ˆj 200 kˆ N
F
200
2
100 200 300 N
2
2ˆ 1ˆ 2 ˆ
i j k
3
3
3
2
cos 1 48.2o
3
1
cos 1 109o
3
ûF
2
cos 1 48.2o
3
32
2
Soru: 40 N ağırlığındaki sandığı
taşıyan iplerdeki kuveetleri
hesaplayınız. Serbest Cisim Diyagramı
Her bir kuvveti Kartezyen vektör formunda
ifade edelim. Doğrultu vektörlerini belirlemek için noktasal
koordinatlar:
A (0, 0, 0) B (‐3, ‐4, 8) C (‐3, 4, 8) Kuvvet vektörleri: A (0, 0, 0) B (‐3, ‐4, 8) C (‐3, 4, 8)
FB FB uˆ AB
FC FC uˆ AC
FD FD uˆ AD
rAB
3 ˆi 4jˆ 8kˆ
FB FB
F
B
2
2
2
r
AB
3 3 8
FB 0.318 FB ˆi 0.424 FB ˆj 0.848 FB kˆ
rAC
3 ˆi 4 ˆj 8kˆ
FC FC
FC
2
2
2
r
AC
2 3 8
FC 0.318 FC ˆi 0.424 FC ˆj 0.848 FC kˆ
FD FD ˆi
W 40kˆ N
Denge:
F0
FB FC FD W 0
0.318 FB ˆi 0.424 FB ˆj 0.848 FB kˆ
0.318 FC ˆi 0.424 FC ˆj 0.848 FC kˆ FD ˆi 40kˆ 0
Fx 0
Fy 0
Fz 0
0.318 FB 0.318 FC FD 0
0.424 FB 0.424 FC 0
0.848 FB 0.848 FC 40 0
FB FC 23.6 N
FD 15.0 N
Soru: 500 kg’lık bloğu şekildeki gibi tutabilmek için herbir mesnet
çubuğu ekseni doğrultusunda oluşan kuvveti hesaplayınız. BÖLÜM 4: Kuvvet Sistemi Bileşkeleri
Giriş
• Vektörel Çarpım • Bir Kuvvetin Momenti – Skaler Gösterim
• Bir Kuvvetin Momenti – Vektörel Gösterim
• Momentler İlkesi
• Bir Kuvvetin Belirli Bir Eksene Göre Momenti • Kuvvet Çiftinin Momenti
• Kuvvetin Rijit Cisim Üzerinde Kaydırılması
• Kuvvet ve Kuvvet Çifti Sisteminin Bileşkesi
• Kuvvet ve Kuvvet Çifti Sistemi için Ek İndirgeme
• Basit Yayılı Yüklerin İndirgenmesi
1
Amaçlar
1. Bir kuvvetin momenti, Moment kavramı ve momentin 2 ve 3
boyutta hesaplanması
2. Bir kuvvetin bir nokta veya bir eksen göre momentini bulma
yolları
3. Kuvvet çiftinin momenti
4. Bir noktadan geçmeyen kuvvet sistemlerinin bileşkelerini
belirleme yöntemleri
5. Yayılı yüklerin konumu belli tekil yüklere indirgenmesi
2
Bir Kuvvetin Momenti
Bir kuvvetin bir noktaya veya bir eksene göre
momenti, kuvvetin bir cismi bu nokta veya eksen
etrafında döndürme eğiliminin bir ölçüsünü gösterir.
Fx – yatay kuvvet
dy - kuvvetin O noktasından uzaklığı
Mo – kuvvetin O notasına göre
momenti
(Mo)z - kuvvetin z-ekseni etrafındaki
momenti
3
Bir Kuvvetin Momenti
Fz – yatay kuvvet
dy - kuvvetin O noktasından uzaklığı
Mo – kuvvetin O notasına göre momenti
(Mo)x - kuvvetin z-ekseni etrafındaki momenti
Moment oluşmaz
4
Bir Kuvvetin Momenti
Momentin büyüklüğü
M=F.d
Momentin yönü
Sağ El Kuralı
5
Düzlemsel Kuvvet Sisteminin Bileşke Momenti
M R O F.d
Saat yönünün tersi
pozitif olarak alınır. 6
Momentin varlığı için dönme olmasına gerek yoktur. Dönme
oluşturma isteğine moment denir. Kuvvetlerin O noktası göre momentlerini bulunuz.
M O 100 N 2 m 200 N m
M O 50 N 0.75m 75 N m
M O 40 N 4 2 cos 30o m 229 N m
8
Kuvvetlerin O noktası göre momentlerini bulunuz.
M O 60 N 1sin 45o m 42.4 N m
M O 7 kN 4 1m 21.0 kN m
9
Örnek 4‐1:
M A 800 N (2.5 m) 2000 N m
M B 800 N (1.5 m) 1200 N m
M C 800 N (0 m) 0 N m
M D 800 N (0.5 m) 400 N m
800 N luk kuvvetin A, B, C ve D noktaların göre momentini hesaplayınız.
10
Örnek 4‐4:
Şekildeki kuvvetlerin O noktasına göre bileşke momentini hesaplayınız. syt
M R O Fd
M R O 50 N 2m 60 N 0
20 N 3sin 30o m 40 N 3cos 30o m
M R O 334N m 334N m saat yönü,sy
sy
syt saat yönünün tersi
11
syt
Bir Kuvvetin Momenti: Vektörel Gösterim
Vektörel Çarpım:
C AB
12
Büyüklük :
C ABsin
Bir Kuvvetin Momenti: Vektörel Gösterim
1. Komütatif değildir.
AB BA
AB BA
2. Skaler ile çarpım:
a AB
aA B A aB
AB a
3. Dağılma özelliği:
A B D AB AD
13
Bir Kuvvetin Momenti: Vektörel Gösterim
Birim Vektörlerin Vektörel Çarpımı:
90o sin 1
ˆi ˆi 0
ˆi ˆj kˆ
ˆj ˆi kˆ ˆj ˆj 0
kˆ ˆi ˆj kˆ ˆj ˆi
14
ˆi kˆ ˆj
ˆj kˆ ˆi
kˆ kˆ 0
Pozitif Yön
Bir Kuvvetin Momenti: Vektörel Gösterim
A B Ax ˆi Ay ˆj Az kˆ Bx ˆi B y ˆj Bz kˆ
ˆj ˆi A B
kˆ ˆi A B
Ax Bx ˆi ˆi Ax B y
Ay Bx
Az Bx
y
y
z
y
ˆi ˆj A B ˆi kˆ
ˆj ˆj A B ˆj kˆ
kˆ ˆj A B kˆ kˆ
x
z
y
z
z
z
A B Ax ˆi Ay ˆj Az kˆ Bx ˆi B y ˆj Bz kˆ
Ax B y kˆ Ax Bz ˆj Ay Bx kˆ Ay Bz ˆi Az Bx ˆj Az B y ˆi
( Ay Bz -Az B y )iˆ ( Ax Bz Az Bx )ˆj ( Ax B y Ay Bx )kˆ
15
Bir Kuvvetin Momenti: Vektörel Gösterim
Determinant formu:
i elemanı için
ˆi
Ax
ˆj
Ay
kˆ
Az î ( Ay Bz Az By )
Bx
By
Bz
j elemanı için
16
ˆi
A B Ax
ˆj
Ay
kˆ
Az
Bx
By
Bz
k elemanı için
ˆi
Ax
ˆj
Ay
kˆ
Az ĵ ( Ax Bz Az Bx )
ˆi
Ax
ˆj
Ay
kˆ
Az k̂ ( Ax By Ay Bx )
Bx
By
Bz
Bx
By
Bz
Bir Kuvvetin Momenti: Vektörel Gösterim
MO r F
Büyüklük:
M O rFsin
F(r sin )
Fd
17
Bir Kuvvetin Momenti: Vektörel Gösterim
Kuvvetin Taşınabilirliği
F kayan vektörü etki çizgisi üzerindeki herhangi bir noktada etkiyebilir ve O noktasına göre aynı momenti üretir.
etki çizgisi 18
MO r F
rA F
rB F
rC F
Bir Kuvvetin Momenti: Vektörel Gösterim
Kartezyen formu:
ˆi
M O r F rx
ˆj
ry
kˆ
rz
Fx
Fy
Fz
M O (ry Fz -rz Fy )iˆ (rx Fz rz Fx )ˆj (rx Fy ry Fx )kˆ
19
Kuvvetler Sisteminin Momenti
M RO r F
r1 F1 r2 F2 r3 F3
20
Örnek 4‐5: Kuvvetin A noktasına göre momentini bulunuz.
ve rrCB konum vektörlerini bulalım.
1. rAB ve
2. Kuvvet vektörü CB doğrultusundaki ûuCB
CB birim vektörünün 60 katıdır. 3. Kuvvetin momenti
M A rB F veya M A rC F
ˆ
rB rBA (1iˆ 3jˆ 2k)m
ˆ
rC rCA (3iˆ 4ˆj 0k)m
rCB rB rC
r (1 3)iˆ (3 4)ˆj (2 0)kˆ
CB
rCB 2iˆ 1jˆ 2kˆ
21
Kuvvet vektörü:
rCB 2iˆ 1jˆ 2kˆ
û CB
r
2iˆ 1jˆ 2kˆ
2iˆ 1jˆ 2kˆ CB
rCB
( 2)2 ( 1)2 (2)2
2
1
2
û CB ˆi ˆj kˆ
3
3
3
F (60 N) uˆ CB
ˆ N
F ( 40iˆ 20ˆj 40k)
Moment vektörü:
ˆ
rB (1iˆ 3jˆ 2k)m
ˆ
rC (3iˆ 4ˆj 0k)m
ˆ N
F ( 40iˆ 20ˆj 40k)
ˆ ( 40iˆ 20ˆj 40k)
ˆ N
M A rB F (1iˆ 3jˆ 2k)m
22
Moment vektörü:
ˆ ( 40iˆ 20ˆj 40k)
ˆ N
M A rB F (1iˆ 3jˆ 2k)m
ˆi
ˆj
kˆ
MA 1
3
2
-40 -20 40
[3(40) 2( 20)]iˆ [(1(40) 2( 40)]jˆ [1( 20) 3( 40)]kˆ
160iˆ 120ˆj 100kˆ
Nm
M A (160) 2 ( 120) 2 (100) 2 224 N m
23
Örnek 4‐6: Şekilde gösterilen kuvvetlerin O’daki mesnete göre ürettikleri bileşke momenti ve moment ekseninin doğrultusunu belirleyiniz.
Konum vektörleri:
ˆ m
rA rOA (5j)
ˆ m
r r (4iˆ 5jˆ 2k)
B
24
OB
Kuvvet vektörleri:
ˆ N
F1 (60iˆ 40ˆj 20k)
F2 (50ˆj) N
ˆ N
F3 (80iˆ 40ˆj 30k)
Moment vektörü:
M R O r F rA F1 rA F2 rB F3
ˆi
MRO 0
ˆj
5
ˆi
kˆ
0 0
-60 40 20
ˆj
5
ˆi
kˆ
0 4
0 50 0
ˆj
5
kˆ
2
80 40 30
[5(20) 40(0)]iˆ [0]jˆ [0(40) 60(5)]kˆ
[0]iˆ [0]jˆ [0]kˆ
[5(30) 40(2)]iˆ [4 30 80 2 ]jˆ [4(40) 80(5)]kˆ
30iˆ 40ˆj 60kˆ N m
25
M R O 30iˆ 40ˆj 60kˆ N.m
MRO
30 2 40 2 602
N.m
M R O 78.10 N.m
30iˆ 40ˆj 60kˆ N.m
MRO
û
MRO
78.10 N.m
0.3841iˆ 0.5121jˆ 0.7682kˆ
Doğrultu kosinüsleri:
û 0.3841iˆ 0.5121jˆ 0.7682kˆ
cos 0.3841
67.4o
cos 0.5121 121o
cos 0.7682
26
39.8o
Moment İlkesi
Bir kuvvetin bir noktaya göre momenti, bu kuvvetin bileşkelerinin bu noktaya göre momentlerinin toplamına eşittir (Varignon, 1654‐
1722).
MO r F
r F1 r F2
r F1 F2
27
Moment İlkesi
28
Örnek 4‐7: Kuvvetin A noktasına göre momentini belirleyiniz. CB d 100cos 45o 70.71mm 0.07071m
Çözüm 1:
M A Fd 200N 0.07071m 14.1N m
M A 14.1kˆ N m
29
Çözüm 2:
M A Fd
200sin 45o N 0.20 m 200cos 45o N 0.10 m
14.1N m
M A 14.1kˆ N m
30
Örnek 4‐8: Kuvvetin O noktasına göre momentini belirleyiniz. Vektörel çözüm:
ˆi
M O r F 0.4
ˆj
kˆ
0.2
0
200 346.4 0
0iˆ 0ˆj 0.4 364.4 0.2 200
31
M O 98.6 kˆ N m
Skaler çözüm:
syt
98.6 N m
M O 98.6 N m sy
M O 98.6 kˆ N m
32
M O 400sin 30o N 0.2 m 400 cos 30o N 0.4 m
Bir kuvvetin bir eksene göre momenti:
1. Bazı durumlarda momentin belli bir eksen üzerindeki
bileşeni gerekebilir.
2. Skaler analiz: ma = Fda , burada da kuvvetin etki
çizgisinden göz önüne alına eksene en kısa dik uzaklıktır.
3. Vektör analizi: ma= ua • (r x F)
4. Bu skaler ve vektörel çarpım bileşimine karma çarpım
denir.
33
Bir kuvvetin bir eksene göre momenti:
34
Bir kuvvetin bir eksene göre momenti:
35
Bir kuvvetin bir eksene göre momenti:
36
Bir kuvvetin bir eksene göre momenti:
Genel bir durumda, F kuvvetinin
aa’ ekseni etrafındaki momentini
bulmak için, önce kuvvetin eksen
üzerindeki herhangi bir noktaya
göre momentini (MO) hesaplayıp
sonra bu momentin eksen
üzerindeki (Ma) izdüşümünü
bulmak şeklinde iki-adımlı çözüm
yolu izlenir.
37
Bir kuvvetin bir eksene göre momenti:
M O = rA F
öyleyse
M a =M O uˆ A uˆ A rA F
38
uax
ua y
uaz
M a = rx
ry
rz
Fx
Fy
Fz
Bir kuvvetin bir eksene göre momenti:
ˆi
ˆj
kˆ
uax
ua y
uaz
ˆ r
M a (uax ˆi ua y ˆj uaz k)
x
ry
rz
Fx
Fy
Fz
M a = rx
Fx
ry
Fy
rz
Fz
uax ua y uaz
Eksen doğrultusundaki birim vektörün x,y,z bileşenleri
rx ry rz
Eksen üzerindeki O noktasından kuvvetin etki çizgisi üzerinde bulunan herhangi bir noktaya çizilen konum vektörünün bileşenleri
Fx Fy Fz
Kuvvet vektörünün x,y,z bileşenleri
39
Bir kuvvetin bir eksene göre momenti:
1. Ma pozitif veya negatif işaretli bir skalerdir.
2. Pozitif işaret momentin yönünün ua birim vektörüyle
aynı olduğu anlamına gelir.
3. Negatif işaret momentin yönünün ua birim vektörüyle
zıt olduğu anlamına gelir.
40
Örnek 4‐9: A noktasına uygulanan F kuvvetinin x ve OA eksenlerine göre momentlerini belirleyiniz.
Çözüm yolu:
1. rOA = rA vektörünü moment kolu
olarak alalım.
2. ua birim vektörünü bulalım.
M
r
F
bulalım.
3. MOO = rOA x
Mxx = M
MOO· iˆi bulalım.
4. M
=
M
5. M
MOa
M
uˆaOB bulalım.
O Oxu
OB
41
rOA = 3iˆ 4ˆj 6kˆ m
3iˆ 4ˆj
3 4
ˆi ˆj
5 5
32 42
M O rOA F 3iˆ 4ˆj 6kˆ m 40iˆ 20ˆj 10kˆ N
M O 80iˆ 210ˆj 100kˆ N m
M x M O ˆi 80iˆ 210ˆj 100kˆ N m ˆi 80N m
M OB M O uˆOB
uˆOB
3 4
80iˆ 210ˆj 100kˆ N m ˆi ˆj
5 5
48 168 N m 120 N m
42
Mx in hesaplanmasında skaler analiz kullanılabilir.
43
Örnek 4‐10: Şekildeki çubuk A ve B deki kelepçeler tarafından
tutulmaktadır. F = {-600 i + 200 j - 300 k} N kuvvetinin ürettiği, çubuğu
AB ekseni etrafında döndürmeye çalışan MAB momentini belirleyiniz.
M AB û AB r F
rAB
0.4iˆ 0.2ˆj
û AB
rAB
(0.4) 2 (0.2) 2
û AB 0.894iˆ 0.447ˆj
r rD ( 0.2ˆj )m
ˆ N
F {600iˆ 200ˆj 300k}
44
0.894 0.447
M AB
0
600
0.2
200
0
0
300
M AB 0.894 [( 0.2)(300) (0)(200)]
0.447[(0)(300) (0)(600)]
0[(0)(200) (0.2)(600)]
M AB 53.67 N m
û AB ile ters işaretli
M AB ( 53.67)[0.894iˆ 0.447ˆj]
M AB 48.0iˆ 24.0ˆj N m
45
Kuvvet Çiftinin Momenti:
Kuvvet çifti aralarındaki dik uzaklık d
olan, aynı büyüklükte ve zıt yöndeki
paralel iki kuvvet olarak tanımlanır.
Çifti oluşturan iki kuvvetin bileşke kuvveti sıfır olduğundan,
çiftin tek etkisi belirli bir yönde bir dönme veya dönme
eğilimi üretmektir.
46
Kuvvet Çiftinin Momenti:
Kuvvet çiftinin momenti uzaydaki herhangi bir keyfi O noktasına göre belirlenen, iki kuvvetin momentlerinin toplamına denktir.
M = F.d
M r A (-F) r B (F) (r B r A ) F
r A r r B , ve r (r B r A ).
M r F
Kuvvet çiftinin momenti bağımsız vektördür.
47
serbest
Kuvvet Çiftinin Momenti:
48
Kuvvet Çiftinin Momenti:
49
Örnek 4‐11:
=
Örnek 4‐12:
50
=
Örnek 4‐13: Boruya etki eden kuvvet çiftinin momentini bulunuz.
Skaler çözüm: F 25 N
M F.d 25N 5.2cm
d 6 cos 30o 5.2 cm
M 129.9 N.cm
51
Vektörel çözüm 1:
M O rA 25kˆ rB 25kˆ
M O 8jˆ 25kˆ
6 cos 30o ˆi 8jˆ 6sin 30o kˆ 25kˆ
M 200iˆ 129.9ˆj 200iˆ 129.9ˆj N.cm
Vektörel çözüm 2:
M O rAB 25kˆ
M O 6 cos 30o ˆi 6sin 30o kˆ 25kˆ
130ˆj N.cm
52
Kuvvetin Rijit Cisim Üzerinde Kaydırılması
O noktası kuvvetin etki çizgisi üzerinde:
O noktası kuvvetin etki çizgisi üzerinde değil:
53
54
55
56
Kuvvet ve Kuvvet çifti sisteminin bileşkesi
Vektör :
FR F
M RO Mc MO
1. MO sisteme etki eden kuvvetlerin O noktasına göre momenti.
2. Mc sistem içindeki kuvvet çiftlerinin momenti.
3. MO O noktasının konumuna bağlıdır. Mc değildir. 57
Örnek 4‐16: Şekilde gösterilen sisteme etki eden kuvvetlerin A noktasında oluşturduğu etkiyi eşdeğer bileşke kuvvet ve moment olarak ifade ediniz.
FR x Fx
FR x 100 N 400 cos 45o 382.8 N
FR x 382.8 N
FR y Fy
FR y 600 N 400 sin 45o 882.8 N
FR y 882.8 N
FR (382.8) 2 (882.8) 2 962 N
FR
tan 1 y
FR
y
58
882.8
tan 1
66.6o
382.8
syt M R A M A
syt
M R A (100 N)(0) (600 N)(0.4 m) (400 sin 45o N)(0.8 m)
MRA
( 400 cos 45o N)( 0.3 m)
551 N m 551 N m (sy)
FR (382.8)2 (882.8) 2 962 N
FR y
tan
FR x
1
59
60
882.8
66.6o
tan 1
382.8
Örnek 4‐15: Şekilde verilen kuvvet sisteminin O noktasına göre
momentini hesaplayızın.
F1 800kˆ N
F2 300N uˆ CB
r
F2 300N CB 249.6 ˆi 166.4ˆj N
rCB
M 400 ˆj 300kˆ N m
FR F F1 F2
FR 800kˆ 249.6 ˆi 166.4ˆj
FR 249.6 ˆi 166.4ˆj 800kˆ N
MRO MR O MC
M R O M rC F1 rB F2
61
62
Kuvvet ve Kuvvet Çifti Sistemi İçin Ek İndirgeme
Tek bir bileşke kuvvete basitleştirme
63
Kuvvet ve Kuvvet Çifti Sistemi İçin Ek İndirgeme
Bir noktadan geçen kuvvet sistemleri
64
Kuvvet ve Kuvvet Çifti Sistemi İçin Ek İndirgeme
Düzlemsel kuvvet sistemleri
=
MRO = (r x F) bileşke momenti FRO bileşke kuvvetine diktir .
Dolayısıyla FRO, O’ya göre aynı MRO momentini yaratacak
şekilde, O’dan d kadar mesafede konumlandırılabilir.
65
Örnek 4‐18:
AE kiriş, bir düzlemsel kuvvet sistemi etkisindedir. Verilen
kuvvet sistemine eşdeğer bileşke kuvvetin büyüklüğünü,
doğrultusunu ve kiriş üzerindeki konumunu belirleyiniz.
66
FR x Fx 500 cos 60o N 100 N 350 N
FR y Fy -500 sin 60o N 200 N -233 N
FR (350) 2 (-233)2 420.5 N
233
o
tan -1
33.7
350
(syt) M R E M E
500 sin 60o
4 500 cos 60 0
o
100 0.5 200 2.5
1182.1 N m
67
(syt) M R E M E 500 sin 60o
4 500 cos 60 0
100 0.5 200 2.5 1182.1 N m
233 d 350 (0) 1182.1 N m
d 5.07 m
68
o
Paralel kuvvet sistemleri:
1.
2.
3.
4.
Bütün kuvvetlerin z doğrultusunda etkidiğini
varsayalım.
X-y düzleminde kuvvet çiftleri olabilir.
Bir noktada kuvvetlerin ve oluşturdukları
momentlerin toplamını hesaplayalım.
Bileşke kuvveti aynı momenti oluşturacak şekilde
d mesafedeki bir noktaya taşıyalım.
69
Paralel kuvvet sistemleri:
70
Örnek 4‐20:
Plaka dört paralel kuvvete maruzdur. Verilen kuvvet sistemine
eşdeğer bileşke kuvvetin, büyüklük ve doğrultusunu
belirleyiniz ve plaka üzerindeki uygulama noktasını bulunuz.
71
FR F - 600 N 100 N - 400 N - 500 N -1400 N
M O x 600 (0) 100 (5) - 400 (10) 500 (0) - 3500 N m
M O x 600 (8) 100 (6) 400 (0) 500 (0) 4200 N m
72
- 1400 N y M O
x
- 3500 N m
y 2.50 m
1400 N x M O
x
4200 N m
x 3.00 m
73
Örnek :
Şekilde verilen kuvvet sisteminin etkisini yaratacak tek bir bileşke kuvvete indirgeyiniz ve konumunu (0,y) olacak şekilde belirleyiniz.
74
Fx 5(sin 40o ) 3cos(60o ) 54 7.5 1.286 kN
Fy 5(cos 40o ) 3sin(60o ) 53 7.5 5.732 kN
MO 53 7.5 (3) 5(cos 40o )(2)
3cos(60o )(5) 13.34 kN m
1.286
kN y 13.34 kN m
y 10.4 m
y -10.4m
aşağı yönde
75
3 kN
60o
4
5.87 kN
3
5.73 kN
3m
40o
2m
77.4o
1.286 kN
76
5 kN
5m
7.5 kN
O
13.34 kN m
3 kN
60o
5 kN
5m
7.5 kN
40o
4
3
2m
O
3m
5.87 kN
10.4 m
5.73 kN
77.4o
1.286 kN
77
Yayılı yükler
1. Rüzgar, kar , sıvı veya cisimlerin ağırlığı tarafından oluşturulur.
2. Şiddeti basınç olarak ölçülür.
3. Birimler, Pa, Mpa (N/mm2)
78
w(x)=p(x).a
FR w(x)dx dA A
L
A
79
dF moment olusturur
dM x dF x w(x) dx
x FR x dF x w(x) dx x dA
A
L
x
x w(x) dx
L
FR
x w(x) dx
L
w(x) dx
L
80
x dA
A
dA
A
81
Soru:
A
1
2
9m 1440 N m 6.48 kN FR
9
x 160 x dx
38880
0
0
x 9
6m
9
0 160 x dx 160 x2 0 6480
9
3
160 x3
2
82
83
Soru:
84
w ( x ) ax b
w ( 0 ) p1 a( 0 ) b p1 b
w ( L ) p 2 a( L ) b aL p1
p 2 p1
a
L
p p1
w( x ) 2
x p1
L
85
Soru:
86
Soru:
87
BÖLÜM 5: Rijit Cisim Dengesi
Giriş
• Rijit Cisim Denge Şartı
• Mesnet Tepkileri
• Serbest Cisim Diyagramları
• İki Boyutta Denge
• İki ve Üç Kuvvet Elemanları
• Üç Boyutta Denge
1
F 0
MO 0
Rijit Cisim Denge Şartı
• Bu denklemler; rijit bir cismin dengede kalabilmesi için, cisim üzerine
etkiyen bütün dış kuvvetlerin ve dış kuvvetlerin bir noktaya göre
momentleri toplamının sıfıra eşit olması gerektiğini göstermektedir. Bu
denklemler rijit bir cismin dengesi için gerek ve yeter şarttır.
• En genel durum için, her bir kuvvet ve moment dik bileşenlerine
ayrıldığında, rijit cismin dengede kalabilmesi için gerek ve yeter şartlar
aşağıdaki 6 skaler denklem ile gösterilebilir:
F 0 F 0 F 0
M 0 M 0 M 0
x
y
x
2
z
y
z
Mesnet Tepkileri
Genel kural:
Bir mesnet, cismin verilen bir doğrultuda ötelenmesini
engelliyorsa, cisim üzerinde söz konusu doğrultuda bir kuvvet
ortaya çıkar.
Bir mesnette cismin dönmesi engelleniyorsa, cisim üzerinde bir
kuvvet çifti momenti uygulanır.
3
Mesnet Tepkileri (2 Boyutlu)
4
Mesnet Tepkileri
5
Mesnet Tepkileri
6
Mesnet Tepkileri
7
Mesnet Tepkileri
8
Serbest Cisim Diyagramları
Rijit bir cismin dengesini ele alan bir problemin çözümünün ilk aşaması,
incelenen cismin serbest cisim diyagramını çizmektir. Serbest cisim
diyagramı çizilirken aşağıdaki hususlara dikkat edilmelidir;
•Serbest cisim diyagramı çizilecek sistem, zeminden ve diğer tüm
cisimlerden ayrılmalıdır.
•Cisme etki eden bütün dış kuvvetler serbest cisim gösteriminde
belirtilmelidir. Bilinen dış kuvvetlerin şiddetleri ve doğrultuları
diyagramda açıkça ifade edilmelidir.
•Bilinmeyen dış kuvvetler de cismin diyagramı üzerinde belirtilmelidir. Bu
kuvvetler genellikle zemin ve diğer cisimlerin, rijit cismin muhtemel
hareketine engel olan tepkilerdir.
•Serbest cisim diyagramı üzerinde boyutlar da gösterilmelidir.
9
Serbest Cisim Diyagramları
10
Serbest Cisim Diyagramları
11
Serbest Cisim Diyagramları
12
Serbest Cisim Diyagramları
13
Serbest Cisim Diyagramları
14
Serbest Cisim Diyagramları
15
Serbest Cisim Diyagramları
16
Serbest Cisim Diyagramları
17
İki Boyutta Denge
2D Skaler Denge Denklemleri
Fx 0
Fy 0
Mo 0
18
İki Boyutta Denge
2D Alternatif Denge
Denklemleri
Fa 0
MA 0
MB 0
Bu denklemlerin kullanılabilmesi için, A ve B noktalarının, a eksenine dik bir
doğru üzerinde yer almamaları gerekir.
19
İki Boyutta Denge
2D Alternatif Denge
Denklemleri
Fa 0
MA 0
MB 0
Bu denklemlerin kullanılabilmesi için, A,
B ve C noktaları, aynı doğru üzerinde
olmaması gerekir.
20
Uygulama: Şekilde verilen sistemin mesnet tepkilerini hesaplayınız.
Serbest cisim Diyagramı:
21
Denge denklemleri:
F
x
0
600cos45o B x 0
B x 424N
M
B
0
100 2 600sin 45o 5 600cos45o 0.2 A y 7 0
A y 319N
F
y
0
A y 600sin 45o 100 200 B y 0
B y 405N
22
Uygulama: Şekilde verilen sistemin mesnet tepkilerini hesaplayınız.
Serbest cisim Diyagramı:
Denge denklemleri:
M
A
0
F
x
F
0
y
0
100 0.5 T 0.5 0
100sin 30o A x 0
A y 100cos 305o 100 0
T 100 N
A x 50 N
A y 187 N
23
Uygulama: Şekilde verilen sistemin mesnet tepkilerini hesaplayınız.
Serbest cisim Diyagramı
MA
0 (syt)
90N m (60N)(1m) (N B )(0.75m) 0
N B 200N
Fx 0
A x 200sin 30o 0
A x 100 N
Fy 0
A y 200 cos 30o 60 0
24
A y 233N
Uygulama: Şekilde verilen sistemin mesnet tepkilerini hesaplayınız.
Serbest cisim Diyagramı:
25
İki Boyutta Denge
• Denge denklemleri:
Fx 0
5
A x 52 30 cos 60o 0
13
A x 5.00 N
Fy 0
12
A y 52 30sin 60o 0
13
A y 233N
MA
26
0 (syt)
12
M A 52 0.3 30sin 60o 0.7 0
13
M A 32.6N m
Uygulama: Şekilde verilen sistemin mesnet tepkilerini hesaplayınız.
Serbest cisim Diyagramı:
27
Denge denklemleri:
Fx 0
C y sin 30o By sin 30o A x 0
Fy 0
300 C y cos 30o By cos 30o 0
MA
0 (syt)
B y 2 C y 6 4000 300 cos 30o 8 0
B y 1000N 1kN
C y 1346.4N 1.35kN
A x 173N 0.173kN
28
Uygulama: Şekilde verilen sistemin ağırlığı 12000 kN olduğuna göre lastiklerdeki tepkileri hesaplayınız.
29
Serbest cisim Diyagramı:
Denge denklemleri:
MO 0
NC
12000 N
N C 4 12000 5 0
N C 15000 N
Fx 0
NA NC 0
4m
N A 15000 N
Fy 0
NB
NA
N B 12000 0
O
5m
30
N B 12000 N
İki ve Üç Kuvvet Elemanları
• İki Kuvvet Elemanı:
Bir eleman üzerinde kuvvetler sadece iki noktada uygulanıyor ve eleman
üzerinde hiç moment uygulanmıyorsa bu elemana iki kuvvet elemanı adı verilir.
• F1 ve F2 şeklinde iki kuvvetin etkisindeki rijit bir
cismi ele alalım.
• Cismin dengede olması için denge denklemlerinin
sağlanması gerekir.
• (F=0) denge şartı, kuvvetlerin büyüklüklerinin
aynı, fakat yönlerinin zıt olduğu zaman sağlanır.
• (MO=0) denge şartının sağlanması içinse herhangi
bir noktaya göre moment toplamının sıfır olması
gerekmektedir. Bu şart için ise kuvvetler aynı etki
çizgisine sahip olmalıdır.
31
İki ve Üç Kuvvet Elemanları
32
İki ve Üç Kuvvet Elemanları
• Üç Kuvvet Elemanı:
Bir eleman üzerine sadece üç kuvvet etkiyorsa, bu elemanın dengede
olması için kuvvetler aynı noktadan geçmeli veya paralel olmalıdır.
• Üç noktaya etki eden kuvvetlere maruz rijit bir cismi
ele alalım.
• Rijit cisim dengede olduğu için, cisme etki eden
kuvvetlerin herhangi bir noktaya göre momentleri
toplamı sıfır olmalıdır.
• F1 ve F2’nin etki çizgisinin kesiştiğini kabul ederek ve
kesişim noktasını D ile göstererek D’ye göre
momentleri toplarız. F1 ve F2’nin D’ye göre
momentleri toplamı sıfır olduğu için, F3’ünde D’ye
göre momenti sıfır olmalıdır ve F3’ün etki çizgisi D’den
geçmelidir.
• Üç kuvvetin etki çizgisi aynı noktadan geçmelidir. Tek
istisna kuvvetlerin etki çizgilerinin paralel olmasıdır.
33
Uygulama: Şekildeki ABC kolu, A’da mafsallıdır ve BD parçasına bağlanmıştır. Mafsalın A noktasında ABC kolu üzerine uyguladığı kuvveti belirleyiniz (eleman ağırlıkları ihmal edilmiştir).
Serbest Cisim Diyagramı
(SCD)
34
İki ve Üç Kuvvet Elemanları
0.2 0.5
o
tan 1
60.3
0.4
Fx 0
FA cos 60.3 o F cos 45 o 400 0
Fy 0
FA sin 60.3 o F sin 45 o 0
FA 1.07 kN
F 1.32 kN
35
Uygulama: Bir adam kütlesi 10 kg, uzunluğu 4 m olan bir kalası halat ile çekerek kaldırmaktadır. Halattaki gerilme kuvveti T ile A’daki tepkiyi bulunuz.
ÇÖZÜM:
• Cismin serbest cisim diyagramının çizilmesi
gerekir.
• Kiriş üç kuvvet elemanı olduğu için
üzerinde etki eden
kuvvetler aynı
noktadan geçmelidir. Bu nedenle R tepkisi,
ağırlık ile gerilme kuvvetinin etki
çizgilerinin kesişim noktasından geçmelidir.
Bu durumda R’nin yatayla yaptığı açı
belirlenmelidir.
• R’nin büyüklüğünü belirlemek üzere kuvvet
üçgeni kullanılmalıdır.
36
Serbest cisim Diyagramı:
AF AB cos 45 4mcos 45 2.828m
CD AE 12 AF 1.414 m
BD CD cot(45 25) 1.414 m tan 20 0.515 m
CE BF BD 2.828 0.515 m 2.313 m
CE 2.313
tan
1.636 58.6
AE 1.414
T
R
98.1 N
sin 31.4 sin110 sin 38.6
T 81.9 N
R 147.8 N
37
Üç Boyutta Denge
38
Üç Boyutta Denge
39
40
Üç Boyutta Denge
41
Üç Boyutta Denge
42
Üç Boyutta Denge
43
Üç Boyutta Denge
44
Üç Boyutta Denge
Denge denklemeleri
F 0 Fx ˆi Fy ˆj Fz kˆ
M O 0 M x ˆi M y ˆj M z kˆ
Fx 0
Fy 0
Fz 0
Mx 0
My 0
Mz 0
45
Üç Boyutta Denge
•Rijit Cisimler İçin Bağ Durumları:
a) Artık Bağlar (Redundant Constraints): Bir cisim, fazlalık, yani cismi
dengede tutmak için gerekenden fazla mesnede sahip ise cisim statik
olarak belirsiz (statically indeterminant) hale gelir. Statik olarak
belirsizlik, cisim üzerindeki bilinmeyen yükleme sayısının bu
yüklemelerin çözümü için kullanılabilen denge denklemi sayısından
daha fazla olduğunu ifade eder.
46
Üç Boyutta Denge
47
•Rijit Cisimler İçin Bağ Durumları:
b) Uygunsuz Bağlar (Improper Constraints): Bazı durumlarda, cisim
üzerindeki bilinmeyen kuvvet sayısı denge denklemi sayısı kadar olsa
da, mesnetlerdeki uygunsuz bağ kuvvetleri nedeniyle cismin
kararsızlığı ortaya çıkabilir.
48
Üç Boyutta Denge
49
Üç Boyutta Denge
50
Üç Boyutta Denge
51
Üç Boyutta Denge
52
Uygulama: Şekilde verilen sistemin mesnet tepkilerini hesaplayınız.
Serbest Cisim Diyagramı:
53
Denge Denklemleri:
F
F
F
x
0 Bx 0
y
0 By 0
z
(1)0
0 A z Bz 300 981 TC
M
x
0 TC 2 9811 Bz 2 0 (2)
M
y
0 300 1.5 9811.5 Bz 3 A z 3 200 0 (3)
54
A z B z TC 1281
A z 790.5 N
TC B z 490.5
B z 216.7 N
B z A z 573.83
TC 707.2 N
Uygulama: Şekilde verilen sistemde 100 kg’lık yükün dengede kalması için gereken P düşey kuvvetini ve mesnet tepkilerini hesaplayınız.
Serbest Cisim Diyagramı:
55
Denge Denklemleri:
M
x
0
981 0.1 P 0.3co30o 0
P 377.6 N
M
y
0
981 0.5 A z 0.8 P 0.4
A z 424.3N
Mz 0
A y 0.8 0
Ay 0
56
F
x
0
Ax 0
F
y
0
A y By 0
By 0
F
z
0
A z 981 B z P 0
B z 934N
Uygulama: Şekilde verilen sistemde BC ve BD halatlarındaki çekme kuvvetlerini ve A küresel mafsalındaki tepkileri hesaplayınız.
Serbest Cisim Diyagramı:
57
Vektörel İfadeler:
F 1000 ĵ N
FA A x î A y ĵ A z k̂
TC 0.7071 TC î 0.7071 TC k̂
3
6
3
TD TD î ĵ
9
9
9
rBD
TD TD
r
BD
58
TD
32 62 62
3 î 6 ĵ 6 k̂
k̂
Denge Denklemleri:
F
0
F
F
T
T
A
C
D
Fx 0
3
A x 0.7071 TC TD 0
9
Fy 0
6
A y TD 1000 0
9
Fz 0
M
0
r
F
T
T
A
B
C
D
Mx 0
6
6 TD 61000 0
9
4 TD 6000 0
My 0
3
6 0.7071 TC 6 TD 0
9
4.24 TC 2 TD 0
Mz 0
6
A z 0.7071 TC TD 0
9
59
5 bilinmeyen 5 denklem
3
A x 0.7071 TC TD 0
9
6
A y TD 1000 0
9
6
A z 0.7071 TC TD 0
9
4 TD 6000 0
4.24 TC 2 TD 0
Çözüm:
4 TD 6000 0
TD 1500 N
4.24 TC 2 TD 0
TC 707 N
3
A x 0.7071 TC TD 0
9
Ax 0 N
6
A y TD 1000 0
9
Ay 0 N
6
A z 0.7071 TC TD 0
9
60
A z 1500 N
Uygulama: Şekilde verilen sistemde BD ve BE halatlarındaki çekme kuvvetlerini ve A küresel mafsalındaki tepkileri hesaplayınız.
Serbest Cisim Diyagramı:
5 bilinmeyen, çözüm için 5 denkleme ihtiyaç vardır
61
Vektörel İfadeler:
F 200 kˆ N
FA A x ˆi A y ˆj A z kˆ
TE TE ˆi
T T ˆj
D
D
Denge Denklemleri:
F
0
F
F
T
T
A
E
D
F
F
F
62
x
0 A x TE 0
y
0 A y TD 0
z
0 A z 200 0
Denge Denklemleri: A noktasına göre moment
M
0
r
F
r
T
T
A
C
B
E
D
1
rC rB 0.5iˆ 1jˆ 1kˆ
2
M x 0 2 TD 200 0
M
M
y
0 2TE 100 0
z
0 TD 2TE 0
3
A x 0.7071 TC TD 0
9
6
A y TD 1000 0
9
6
A z 0.7071 TC TD 0
9
4 TD 6000 0
63
4.24 TC 2 TD 0
A x 100N
A y 50N
A z 50N
TD 100N
TE 50N
BÖLÜM 6: Yapısal Analiz
Giriş
• Basit Kafes Sistemler
• Düğüm Noktaları Yöntemi
• Sıfır Kuvvet Çubukları
• Kesim Yöntemi
• Uzay Kafes Sistemler
• Çerçeveler ve Makineler
1
Amaçlar
1. Düzlem kafes sistemlerde
yöntemlerin geliştirilmesi
kuvvetlerin bulunması için
• Düğüm noktaları yöntemi
• Kesim yöntemi
2. Pim birleşimli çerçevelerin ve makinelerin çözümü.
2
3
4
5
Kafes Nedir?
Uç noktalarında birleşen narin elemanlardan oluşan
yapılara kafes denir. Bulonlu veya kaynaklı birleşimler,
mafsal kabul edilirler; bu durumda, eleman uçlarında tek
kuvvet bulunur (moment oluşmaz). Sistemde yalnızca, ikikuvvet elemanları bulunduğu düşünülür.
6
7
8
Birleşim her çubuktan büyük bir vida veya pim geçirilerek oluşturulur.
İki kuvvet elemanı
9
10
11
12
13
14
15
16
17
18
Düzlem Kafes
Bütün elemanlar aynı düzlem içindedir.
1.
2.
3.
4.
Yükler düğüm noktalarına uygulanır.
Düğüm noktaları pimli birleşim şeklinde modellenir.
Elemanlar iki kuvvet elemanıdır.
Elemanlar çekme veya basınç altındır.
Rijit Kafes: Kafes sisteme düğüm noktalarında bir dış kuvvet sistemi uygulandığında şekil değiştirmiyorsa rijittir. Kafes mesnetlerinden söküldüğünde şeklini korumalı rijit kalmalıdır.
19
En basit stabil kafes bir üçgendir! (Temel üçgen). Üç eleman ve üç düğüm noktası bir üçgen oluşturur.
Rijit Kafes
20
C
C
A
B
D
A
B
Basit kafesler temel üçgene iki çubuk ve bir düğüm ilave edilerek oluşturulur.
C
A
D
E
B
21
Basit kafesler temel üçgene iki çubuk ve bir düğüm ilave edilerek oluşturulur. Eleman sayısı :
m = 3 + 2 ( j ‐ 3 ) = 2j ‐ 3 Bir kafes probleminde bilinmeyen sayısı?
m : çubuk sayısı, kuvvet
r : reaksiyon kuvveti
m + r bilinmeyen
j : düğüm noktası sayısı
2j : düğüm noktalarında yazılabilecek denge denklemi sayısı
Denge için 2j = m + r
Düzlem kafes: r = 3
2j = m + 3
m = 2j ‐ 3 = 3 + 2( j ‐3 )
22
m 2 j r Statik olarak dengesiz
m 2 j r Statik olarak kararlı
m 2 j r Statik olarak kararsız
Statik olarak kararlı
m=7
j=5
r=3
m = 2j - r
23
Statik olarak kararsız
m=8
j=5
r=3
m > 2j - r
Statik olarak dengesiz
m=6
j=5
r=3
m < 2j - r
24
Kafeslerde izin verilmeyen durumlar!
Eleman boyunca mafsal olmaz
Kafes üçgenlerden oluşmalı
F
Kuvvetler sadece düğüm noktalarına
uygulanabilir
25
Çubuk kuvvetleri
Çekme 26
Basınç
Kafeslerin Analizi
1.
Dış Denge
a.
2.
Mesnet Tepkileri
İç Denge
a.
Her bir çubuktaki kuvvetler
i.
Düğüm Noktaları Yöntemi
ii. Kesim Yöntemi
27
Düğüm Noktaları Yöntemi
1.
2.
3.
Düğüm noktasının denge durumu ele alınır.
Serbest Cisim Diyagramı çizilir.
Kafes elemanları iki‐kuvvet elemanı olduklarından düğüm noktalarında çizilen SCD ları aynı noktadan geçen düzlem kuvvet sistemlerinden oluşur.
Her düğüm noktasında iki denge denklemi yazılır: Fx=0, Fy=0
4.
Düğüm noktalarının ve Elemanların Serbest Cisim Diyagramları
28
Düğüm noktalarının ve Elemanların Serbest Cisim Diyagramları
29
Dış kuvvetler ve mesnet tepkileri
B
500 N
Fy 0
500 A x 0 C y A y 0
2m
A
45o
A x 500 N
C
Ax
Ay
2m
Tüm kafesin SCD’si
30
Fx 0
Cy
A y Cy
MA 0
500 2 C y 2 0
A y C y 500 N
B
500 N
Fx 0 500 FBC
sin 45o 0
FBC 707.1 N
45o
FBC
FBA
FBC kuvveti çekme
olarak alınsın.
B
500 N
45o
FBC
FBA
31
FBC kuvveti basınç
olarak alınsın.
Fy 0 FBC
cos 45o FBA 0
FBA 500 N Ç
Fx 0 500 FBC
sin 45o 0
FBC 707.1 N B
Fy 0 FBC
cos 45o FBA 0
FBA 500 N Ç
Fx 0
707.1 N
FCA 707.1 cos 45o 0
45o
FCA 500 N
C
Ç
Fy 0
FCA
C y 707.1 sin 45o 0
Cy
C y 500 N
Fx 0
500 N
A
Ax
Ay
32
FBC 707.1 N B
500 N
A x 500 0
A x 500 N
Fy 0
A y 500 0
A y 500 N
33
Çubuk kuvvetlerini hesaplayınız.
Fy 0
Fx 0
MA 0
A x 3 kN 0 C y 4 3 kN 2 0
C y Ay 0
A x 3 kN
C y 1.5 kN
A y 1.5 kN
34
C düğümü
Fx 0
FCD cos 30o FCBsin 45o 0
FCB
Fy 0
45o
FCD
FCDsin 30o FCB cos 45o 1.5 0
C
30o
0.866 FCD 0.7071 FCB
FCD
1.5 kN
0.7071
FCB 0.817 FCB
0.866
0.817 FCB 0.5 0.7071FCB 1.5 0
0.299 FCB 1.5
FCB 5.02 kN
FCD 0.817 FCB 0.817 5.02 kN 4.10 kN
FCB 5.02 kN
FCD 4.10 kN
B
Ç
35
Fx 0
D düğümü
FBA
FDA cos 30o 4.10 cos 30o 0
FDA 4.10 kN
D
30o
30o
FDA
4.10 kN
A düğümü
45o
FDA =4.10 kN
3 kN
A
30o
1.5 kN
36
Fy 0
FDA sin 30o FDC sin 30o FBA 0
4.10 0.5 4.10 0.5 FBA 0
FBA 4.10 kN
FAB
Ç
Ç
Fx 0
4.10cos 30o FAB sin 45o 3 0
FAB 0.776 kN
FAB 0.776 kN
B
Çubuk kuvvetlerini hesaplayınız.
Fx 0
600 C x 0
C x 600 N
MC 0 syt
A y 6 400 3 600 4 0
A y 600 N
Fy 0
A y 400 C y 0
C y 200 N
37
FAB
5
A
Fx 0
4
3
600 N
FAD
3
FAD FAB 0
5
Fy 0
4
600 FAB 0
5
FAB 750 N
FAB 750 N
FAD 450 N
38
B
Ç
Fx 0
FDC
FDB
3
600 450 FDB 0
5
FDB 250 N
5
4
FDB 250 N
3
D
FAD = 450 N
600 N
Fy 0
4
FDC FDB 0
5
4
FDC 250 0
5
FDC 200 N
Gerçek Yönler
FDB 250 N
39
200 N
Fx 0
C
600 N
200 N
40
600 FCB 0
FDB 600 N
FCB
Ç
FDB 600 N
B
Ç
Eğer kafes sisteminde yük taşımayan (kuvvetin sıfır olduğu) elemanlar önceden belirlenebilirse analiz basitleşebilir. Bu tür çubuk elemanlarına sıfır kuvvet elemanı denir.
Eğer bir düğüm noktasında iki çubuk elemanı birleşiyor ve o düğüm noktasına bir dış kuvvet etkimiyorsa veya o düğüm noktası mesnet değilse bu elemanlar yük taşımıyor demektir ve sıfır kuvvet elemanıdır.
41
42
43
Eğer bir düğüm noktasında üç çubuk elemanı birleşiyor ve o düğüm noktasına bir dış kuvvet etkimiyorsa veya o düğüm noktası mesnet değilse bu elemanlardan ikisi aynı doğrultuda ise üçüncü eleman yük taşımıyor demektir ve sıfır kuvvet elemanıdır.
44
45
Fink Çatı kafesi
Sıfır kuvvet elemanlarını belirleyiniz.
46
47
Fink Çatı Kafesi
5 kN
2 kN
C
B
D
A
E
H
G
F
Sıfır kuvvet elemanlarını belirleyiniz.
48
Düğüm Noktaları Yöntemiyle Hesap
1. Tüm kafesin SCD si çizilir ve mesnet reaksiyonları bulunur.
2. En az bir eleman kuvvetinin bilindiği ve en çok iki eleman kuvvetinin belirsiz olduğu düğüm noktalarının SCD si çizilir.
3. Düğüm noktasının SCD sinde gösterilen tüm kuvvetler çekme durumunda alınabilir. Hesap sonucu belirlenen kuvvetler pozitif ise eleman çekme durumunda negatif ise basınç altındadır.
4. Başka türlü kuvvetlerin yönü tahmin edilmeye çalışılarak SCD çizilebilir. Pozitif değerler yönün doğru tahmin edildiği negatif is ters olduğunu gösterir.
5. Düğüm noktaları en az bir eleman kuvvetinin bilindiği ve en çok iki eleman kuvvetinin belirsiz olduğu şekilde seçilmeye devam edilir. 6. Bulunan çubuk kuvvetleri pozitif skaler olarak yanında Basınç (B) ve Çekme (Ç) sembolleri konularak sunulur.
49
Çubuklardaki kuvvetlerin basınç mı çekme mi olduğunu belirtiniz. B
3/4 a
D
A
C
a
a
P
50
1/4 a
Kafesin Serbest Cisim Diyagramı Fx 0 A x 0
B
3/4 a
Ax
D
A
C
Ay
Cy
P
P
2
Ay
P
2
4
1
FAD
FAB 0
17
2
P
1
1
F
0
F
FAB 0
y
AD
2
17
2
FAD 0.687 P Ç
Simetri kullanarak:
Fx 0
FAB
FAD
1
4
A
Cy
a
a
45o
1/4 a
Fy 0 A y Cy P 0
M A 0 Pa Cy (2a) 0
B
FAB 0.943 P
P/2
FCD 0.687 P
FCB 0.943 P
51
Ç
B
B
FDB
3/4 a
4
4
Ax
1
1
D
0.687 P
D
A
C
a
a
0.687 P
Ay
1/4 a
Cy
P
Eleman gerilme durumu
Fy 0
1
0.687 P 1 0.687 P 0
17
17
1.33 P Ç
FDB
FDB
52
CD
AD
CB
AB
DB
(Ç)
(Ç)
(B)
(B)
(Ç)
Elemanların dayanabileceği en büyük kuvvetler aşağıda verilmiştir. Bu durumda uygulanabilecek en büyük P yükü ne olur.
1500 N FAD
800 N FAB
1500 N FDB
1500 N FCD
800 N FCB
a = 10 m
(Ç)
(B)
(Ç)
(Ç)
(B)
Ç
FAB =0.943 P B
FDB =1.33 P Ç
FCD =0.687 P Ç
FCB =0.943 P B
FAD =0.687 P
FAD =1500 P=2183.4 N
FAB =800 P=848.4 N
53
Pmax =848.4 N
Kesim Yöntemi
Eğer bir cisim dengedeyse cismin her parçası veya kısmı da dengededir. 54
55
GE, GC, BC çubuk kuvvetlerini hesaplayınız.
Fx 0
400 A x 0 A x 400 N
Fy 0
A y D y 1200 0
MA 0
1200(8) 400(3) D y (12) 0
D y 900 N
56
SCD
A y 300 N
57
400 N
MG 0
FGE
G
300(4) 400(3) FBC (3) 0
FGC
A
C
B
800 N
800 N
G
3
B
58
5
4
A
300 N
MC 0
300(8) FGE (3) 0
300 N
400 N
FBC 800 N (Ç)
FGC
800 N
FGE 800 N
FGE 800 N (B)
Fy 0
3
300 FGC 0
5
FGC 500 N (Ç)
CF elemanındaki kuvveti hesaplayınız. SCD ve mesnet tepkileri. 59
M
O
0
FCF sin 45o 12m 3kN 8 m 4.75kN 4m 0
FCF 0.589kN B
60
EB elemanındaki kuvveti hesaplayınız. Hiçbir kesim EB kuvvetinin tek seferde hesaplanmasına olanak vermez.
MB 0
1000(4) 3000(2) 4000(4)
FED sin 30o (4) 0
FED 3000 N
FED 3000 N (B)
61
Düğüm noktaları yöntemi!
Fx 0
1000 N
FEF cos 30o 3000 cos 30o 0
E
FEF 3000 N
FEF 3000 N (B)
Fy 0
FEF
FEF sin 30o 3000sin 30o 1000 FEB 0
FEB 2000 N (Ç)
62
3000 N
FEB
Şekilde gösterilen Howe Köprü Kafesi için DE, EH ve HG
elemanlarındaki kuvvetleri hesaplayınız.
20 kN
20 kN
30 kN
C
B
40 kN
D
E
F
4m
A
J
I
H
G
4@ 4m = 16 m
63
Kafesin Serbest Cisim Diyagramı
30 kN 20 kN 20 kN 40 kN
B
C
D
E
Fx 0 A x 0 A x 0
MA 0
F
20(4) 20(8) 40(12) G y (16) 0
4m
A
Ax
J
I
G
H
4@ 4m = 16 m
Ay
G y 45 kN
Fy 0
Gy
A y G y 30 20 20 40 0
A y 65 kN
Kesim Yöntemi
30 kN 20 kN20 kN 40 kN
B
Ax
64
C
a
D
E
F
4m
A
J
Ay
I
H a
4@ 4m = 16 m
G
Gy
MH 0
45(4) FDE (4) 0
Kesim- SCD
FDE 45 kN
40 kN
FDE 45 kN (B)
Fy 0
E
FDE
F
45 40 FEH 0
4m
FEH 5 kN (Ç)
FEH
H FHG
Fx 0
45 FHG 0
G
45 kN
FHG 45 kN (B)
65
50 kN 50 kN 50 kN
M
N
K
L
J
I
E
F
H
4m
G
B
A
LD, LK, CD ve KD çubuk
kuvvetlerini hesaplayınız.
C
D
Fx 0
A x 0
6@ 3m = 18 m
Ax 0
MG 0
50 kN 50 kN 50 kN
M
N
a
L
K
J
I
4m
Ax A
Ay
66
B
H
G
C
D
6@ 3m = 18 m
a
E
F
Gy
50(9) 50(12) 50(15) A y (18) 0
A y 100 kN
Fy 0
A y G y 50 50 50 0
G y 50 kN
50 kN
M
N
Fy 0
50 kN
FLK
5m
4m
3m B
A
4
FLD 50 50 100 0
5
FLD 0
a
L
C
a
SCD - Kesim
FLD
D
FCD
MD 0
100(9) 50(6) 50(3) FLK (4) 0
100 kN
FLK 112.50 kN
ML 0
FLK 112.50 kN (B)
100(6) 50(3) FCD (4) 0
50 kN
Fy 0
FLK 112.50 kN (Ç)
K
FKD 50 0
FKD 50 kN (C)
67
800 N
500 N
B
10 m
FLK
FKJ
FCD
500 N
10 m
C
D
10 m
F
G
A
E
BC, CG, ve GF eleman
kuvvetlerini hesaplayınız.
500 N
10 m
10 m
a
B
C
500 N
D
10 m
G
A
68
900 N
a
F
E
900 N
500 N
MC 0
a
C
B
FBC
FGF
G
a
FGF 800 N (Ç)
MG 0
FCG
10 m
900(10) 500(10) FGF (5) 0
900(5) 500(5) FBC (5) 0
FBC 400 N
FGF 400 N (B)
Fy 0
A
900 N
1
FCG 0
2
566 N
900 500
FCG
FCG 566 N (B)
69
Uzay Kafes Sistemler
Temel eleman tetrahedron: 6 eleman, 4 düğüm noktası
Düğüm noktaları yöntemi: 3B kuvvet sistemlerinin denge denklemleri kullanılarak
çözümü. Her bir eleman yönünde birim vektörlere gerek vardır. Kuvvet vektörü elemandaki kuvvetin büyüklüğü (bilinmiyor!) çarpı eleman doğrultusundaki birim vektördür.
70
Fx 0
Fy 0
Fz 0
71
P 4 ĵ
FAB FAB ĵ
FAC FAC k̂
rAE
2 î 2 ĵ 2k̂
FAE FAE FAE
r
4
4
4
AE
FAE FAE 0.577 î 0.577 ĵ 0.577k̂
72
A düğümünde:
B düğümünde:
F P FAB FAC FAE
Fx 0.577FAE 0
Fy 4 FAB 0.577FAE 0
Fz FAC 0.577FAE 0
FAC FAE 0
FAB 4kN
Ç
F
F
F
x
R B cos 45o .7071FBE 0
y
4 R B sin 45o 0
z
2 FBD .7071FBE 0
FBE R B 5.66 kN
FBD 2 kN
73
Çoklu kuvvet elemanlarından oluşan yapılar.
Çerçeveler: Durağan sistemlerdir ve yükleri taşımada kullanılır.
Machines: Hareketli parçalardan oluşur ve kuvveti iletmeye veya değiştirmeye yarar. 1. Her parçayı sistemden ayırarak serbest cisim diyagramları çizilir. Tüm kuvvetler ve boyutlar gösterilir.
2. İki kuvvet elemanı varsa belirlenir.
3. Farklı iki elemanın birleştiği yerde ortak kuvvetler serbest cisim diyagramlarında eşit büyüklükte fakat zıt yönlerde gösterilir.
4. Eğer iki eleman parçalanmadan bir bütün olarak gösteriliyorsa birleşimdeki kuvvetler iç kuvvetlerdir ve SCD de gösterilmez. 74
BC elemanın düğüme etkisi
75
76
AB elemanın düğüme etkisi
77
78
79
80
81
82
83
Çözüm 1:
Mesnet tepkilerini ve eleman
kuvvetlerini hesaplayınız.
84
F
By
x
0
Ax Bx 0
Ax Bx
Bx
F
y
3m
0
Ay By 0
Ay By
60o
M
Ax
A
0
B x ( 3 sin 60 o ) B y ( 3 cos 60 o ) 0
Ay
2.598 B x 1.5 B y 0
85
By
2000 N
2m
2000(2) By (4) 0
2m
By 1000N
Cx
Bx
Fx 0
Fy 0
B x Cx 0
B y C y 2000 0
Cx B x
M
C
0
2000( 2) B y (4) 0
86
Cy
2.598Bx 1.5By 0
Bx 577.4N
C x Bx 577.4N
By C y 2000 0
C y 1000N
Çözüm 2:
M
B
0
2000( 2) C y (4) 0
C y 1000 N
F
y
0
FAB sin 60 o C y 2000 0
FAB 1154.7 N
F
x
AB iki kuvvet
elemanıdır!
87
88
0
FAB cos 60 o C x 0
C x 577.4 N
89
90
R = 2P + T
T = 800 N
2P = T
T = 400 N
3P = 600
P = 200 N
91
92
93
94
95
Makineler
A’daki bulona uygulanan kavrama kuvvetini hesaplayınız.
5N
B
D
0.75 cm
A
1 cm
E
20o
1.5 cm
96
1 cm
C
3 cm
5N
ME 0
FCD
Ex
E
5(4) FCD sin 30.26o (1) 0
tan-1(1.75/3)=30.26o
FCD 39.69 N
C
Fx 0
Ey
3 cm
1 cm
E x FCD cos 30.26o 0
5N
E x 34.29 N
FA
20o
MA 0
By
1.5 cm
Bx
B
0.75 cm
1.75 cm
FA sin 20o 0.75 FA cos 20o 1.75 Ex 1.75 0
FA 36.0 N
1’e 7 oranında
kuvvet artırımı!
Ex = 34.29 N
5N
Ey
97
D
R = 1.5 m
4m
B
A
5m
6.5 m
500 N
98
C
5m
Her bir elemandaki
kuvvetleri bulunuz
D
Dx
Ay
R = 1.5 m
A
Ax
MA
4m
B
C
6.5 m
5m
5m
Ay = 500 N bulunur.
500 N
Diğer mesnet tepkilerinin hesaplanabilmesi
için ekstra bir denkleme ihtiyaç var!
4 bilinmeyen.
99
By
Ay
By
Cy
500 N
A
Ax
MA
F
Bx
Dx
5m
Bx
5m
Cx
Cy
F
1.5 m
Cx
100
5m
4m
Makara:
CD elemanı:
MB 0
Fy 0
1.5(500) 1.5(F) 0
F 500
A x 187.5 N
MA 0
1.5(500) 4(D x ) 0
D x 187.5
By 500
M A 5(By ) 10(C y ) 0
Fx 0
Fx 0
M A 2500 N.m
Cx Dx F 0
Bx F 0
Cx 312.5
Bx 500
Ay
Dx
By
Cy
F
Ax
F
1.5 m
Cx
101
A x Bx C x 0
MC 0
By 500 0
500 N
Fx 0
Cy 0
Fy 0
Bx
AC elemanı:
5m
By
Cy
A
4m
MA
5m
Bx
5m
Cx
BÖLÜM 7: İç Kuvvetler
Giriş
• İç Kuvvetler
• Kesme Kuvveti ve Eğilme Momenti Diyagramları
• Yük, Kesme Kuvveti ve Eğilme Momenti Arasındaki Bağıntılar
• Kablolar
1
İç Kuvvetler
1. Bir yapı elemanının tasarımı, dış yükleri dengelemek için gerekli
olan, eleman içinde etkiyen yüklerin incelenmesini gerektirir.
2. İç yüklerin hesaplanmasında kesim yöntemi kullanılabilir.
Mesnet Tepkileri :
A x A y By
Dış kuvvetler:
2
F1 F2
İç Kuvvetler
C noktasındaki iç yükleri ele alalım.
C noktasından hayali bir kesit alınırsa, kiriş iki parçaya ayrılacaktır. Her bir parçaya ait SCD çizilirse Her bir parçanın dönmesi ve yer değiştirmesi
engellendiğinden C kesitinde Nc ve Vc kuvvet
bileşenleri ile Mc momenti oluşur.
3
İç Kuvvetler
Kiriş parçalarının serbest cisim diyagramında dış yükler ile birlikte iç kuvvetlerde gösterilmelidir.
Her bir kiriş parçası dengede olmalıdır. Denge denklemleri parçalardan birine uygulanır ve ilgili kesitteki iç kuvvetler hesaplanır.
Fx 0
NC A x 0
Fy 0
A y VC F1 0
MC 0
4
Sadece Ay ve M C denklemdedir.
İç Kuvvetler
5
İç Kuvvetler
6
İç Kuvvetler
7
İç Kuvvetler
8
İç Kuvvetler
Analizde İzlenecek Yol:
• Mesnet tepkileri hesaplanır.
• İç kuvvetlerin belirleneceği noktadan hayali bir kesit alınarak
sistem iki parçaya ayrılır.
• Bu parçalardan herhangi bir tanesi için SCD çizilir.
• Denge denklemleri uygulanarak bilinme‐yenler hesaplanır.
9
Uygulama: A’daki tepki kuvvetini ve B ile C’deki iç normal kuvvetleri bulunuz.
Tüm çubuğun serbest cisim diyagramı
Fy 0
A y 16 12 4 0
A y 8 kN
10
D
4 kN
4 kN
C
Fy 0
12 kN
N B 12 16 4 0
D
B
C
12 kN
NB
16 kN
B
NB
B noktasından
kesim uygulanır
A
Ay
N B 8kN
16 kN
B
Fy 0
A
Ay N B 0
Ay
A y N B 8kN
11
İç Kuvvetler
4 kN
C noktasından
kesim uygulanır
D
C
12 kN
B
D
4 kN
NC 4 0
C
NC
C
12 kN
Ay
16 kN
12
N C 4 kN
NC
16 kN
A
Fy 0
Ay= 8 kN
Fy 0
N C 12 16 8 0
N C 4 kN
Uygulama: B ile C’deki iç dönme momentlerini bulunuz.
Mesnet Tepkileri
M
x
0
10 15 20 TD 0
TD 25 N m
13
M
TB
x
0
10 15 TB 0
TB 5 N m
TC
M
x
0
10 15 20 TC 0
14
TC 25 N m
Uygulama: Dış kuvvet
uygulama noktasının hemen
sağındaki ve solundaki iç kuvvetleri hesaplayınız.
Fx 0
Dx 0
Mesnet Tepkileri
Fy 0
Ay 6 Dy 0
MD 0
9 6(6) - A y (9) 0
A y 5kN
D y 1kN
15
İç Kuvvetler
Fx 0 N B 0
Fy 0 A y VB 0
M B 0 5(3) M B 0
M B 15 kN m
VB 5 kN
Fx 0 NC 0
Fy 0 5 VC 6 0
MC 0 5(3) M B 0
M C 15 kN m
VC 1 kN
16
Fx 0 NC 0
Fy 0 1 VC 0
MC 0 1(6) MC 0
M C 15 kN m
6m
MC
NC
VC 1 kN
VC
1 kN
17
Uygulama: B noktasındaki iç kuvvetleri hesaplayınız.
5
3
4
Mesnet Tepkileri
MA 0
400(4) 53 FCD (8) 0
FCD 333.3 N
18
Fx 0 A x 54 FCD 0
A x 266.7 N
Fy 0
A y 53 FCD 400 0
A y 200 N
İç Kuvvetler
Fx 0
Fy 0
N B 266.7 0
200 200 VB 0
N B 266.7 N
VB 0
MB 0
M B 200(4) 200(2) 0
M B 400 N m
VB 0
N B 266.7 N
19
Kesme Kuvveti ve Eğilme Momenti Diyagramları
• Kirişler, eksenlerine dik olarak uygulanan yükleri taşıması
amacıyla tasarlanan yapı elemanlarıdır.
• Kirişler genellikle, sabit en kesitli, uzun, doğrusal çubuklardır.
• Kirişler mesnetlenme şekillerine göre sınıflandırılırlar.
Bir kirişin tasarımı, kirişin ekseni boyunca her noktada
etkiyen iç kesme kuvvetinin ve eğilme momentinin
değişiminin detaylı olarak bilinmesini gerektirir. Bu
değişim genellikle konumun fonksiyonu olarak çizilen
kesme kuvveti ve eğilme momenti grafikleri ile
gösterilir.
20
Kesme Kuvveti ve Eğilme Momenti Diyagramları
• Kiriş mesnet tepkileri, yalnızca üç bilinmeyen içeriyorsa
belirlenebilirler. Aksi halde, statikçe belirsizdirler.
21
22
23
İŞARET KABULÜ:
a)Pozitif kesme kuvveti etki ettiği elemanı saat yönünde
döndürmeye çalışır.
b)Pozitif eğilme momenti kirişin üst yüzeyinin sıkışmasına neden
olur.
POZİTİF KESME KUVVETİ
V
V
V
V
24
POZİTİF EĞİLME MOMENTİ
M
M
M
M
BASINÇ
ÇEKME
25
Kesme Kuvveti ve Eğilme Momenti Diyagramları
M
T
M
Sol Kesit
N
Sağ Kesit
Bakış Yönü
26
N
T
27
28
Kritik noktalar
4m
4m
50 N/m
A
C
6 kN
3m
6m
9 kN m
29
Kritik noktalar
L
a
b
P
w
x1
x2
x3
4m
4m
50 N/m
A
30
C
Kesme Kuvveti ve Eğilme Momenti Diyagramları
3m
6 kN
6m
9 kN m
Fx 0
Dx 0
Fy 0
3m
6 kN
Ay 6 Dy 0
6m
9 kN m
MD 0
9 6(6) - A y (9) 0
Dy
Ay
Dx
A y 5 kN
D y 1 kN
31
Kesme Kuvveti ve Eğilme Momenti Diyagramları
6 kN
3m
6m
9 kN m
x
5 kN
1 kN
x
0x3
3 x 9
32
0x3
M
V
x
Fy 0
M 0
5V 0
V 5 kN
M 5x kN m
M 5 kN x 0
5 kN
3 x 9
Fy 0
5 kN 6 kN V 0
V 1 kN
6 kN
3m
M 0
M
M 5 x 6 x 3 0
V
5
kN
M 18 x kN m
x
33
6 kN
3m
5 kN
6m
9 kN m
1 kN
V = 5 kN
+5 kN
V (kN)
+
‐
x
V = -1 kN
x
+
M (kN m)
+
M(x) = 5x
15 kN.m
34
M(x) = (18-x)
9 kN.m
4m
4m
Uygulama: 50 N/m
A
4m
C
400 N
4m
4m
Cx
50 N/m
Ax
4m
Cx
=
Cy
Ax
Cy
= Sadece mesnet tepkilerini hesaplarken!!!
Fx 0 Cx 0
Fy 0 A y C y 50(8) 0
M A 0 50(8)(4) - C y (8) 0
A y 200 N
C y 200 N
35
0 x 8
Fy 0
x
M
50 N/m
200 N
V
V 200 lb 50x 0
V 50x 200 N
M 0
x
M 200x 50(x) 0
2
M 200x 25x 2 N.m
x 0,
x 8,
36
V 200 N
V - 200 N
M0
M0
4m
4m
Cx
Ax
50 N/m
Cy
+200
V (N)
+
V 200 50x
x
x= 4m
‐
-200
x
M (N.m)
+
+400
37
Uygulama: M 200x 25x 2
a = 5m
L = 15 m
b = 10 m
w=100 N/m
a = 5m
L = 15 m
b = 10 m
w=100 N/m
P=1000 N
P=1000 N
Ax
Ay
Fx 0 A x 0
M A 0 100(5)(2.5) -1000(10) Cy 15 0
C y 750 N
Fy 0 A y Cy 100(5) 1000 0
38
A y C y 1500 A y 750 N
Cy
0 x 5m
Fy 0 V 750 100x 0
100 N/m
V 750 100x
M
x
M 0 M 750x 100(x) 2 0
V
x
750 N
M 750x 50x 2
5m x 9m
N.m
Fy 0 V 750 100(5) 0
5m
100 N.m
V 250 N
M
M 0
M 750x 100(5) x 2.5 0
x
M 750x 500x 1250
V
750 N
M 250x 1250 N.m
39
10 x 15
10 m
1000 N
M
100 N/m
750 N
5m
x
V
Fy 0
V 750 100(5) 1000 0
V 750 N
M 0
M 750x 100(5) x 2.5 1000 (x 10) 0
40
M 750x 11250 N.m
a = 5m
L = 15 m
b = 10 m
w=100 N/m
P=1000 N
Ax
Ay
+750
V (N)
Cy
V 750 100 x
V 250 N
+
V 750 N
‐
x
-750
M (N.m)
x
+
M 250 x 1250
+2500
41
M 750 x - 50 x 2
+3750
M 750 x 11250
Kesme Kuvveti ve Eğilme Momenti Diyagramları
Şekildeki kirişte verilen yükleme durumu için kesme kuvveti ve eğilme
momenti diyagramlarını çiziniz.
42
ÇÖZÜM:
• Tüm kirişi bir serbest cisim alarak B ve D’deki
tepkileri bulunuz.
• Yük uygulama noktalarının her iki tarafındaki
kesitlerdeki eşdeğer iç kuvvet ve moment
sistemini bulunuz.
Fy 0 : 20 kN V1 0
M 2 0 : 20 kN 0 m M 1 0
V1 20 kN
M1 0
Benzer şekilde
V2 20 kN
M 3 50 kN m
V3 26 kN
V4 26 kN
V5 14 kN
M 3 50 kN m
M 4 28 kN m
M 5 28 kN m
V6 14 kN
M6 0
43
Tekil yükler arasında kesme kuvvetinin sabit, eğilme momentinin doğrusal değiştiğine dikkat ediniz.
44
Uygulama: Şekildeki kirişte verilen yükleme durumu için kesme kuvveti ve
eğilme momenti diyagramlarını çiziniz.
45
ÇÖZÜM:
• Tüm kirişi bir serbest cisim alarak A ve B’deki tepkileri hesaplayınız.
MA 0:
B y (0.8 m) - (2160 N)(0.15 m) - (1800 N)(0.55 m) 0
B y 1642 N
MB 0:
(2160 N)(0.65 m) (1800 N)(0.25 m) - A(0.8 m) 0
A 2318 N
Fx 0 :
Bx 0
• Not: E’deki 1800 N’luk kuvvet, D’deki 1800 N’luk
bir kuvvet ve 180 N.m’lik bir momentle
değiştirilebilir.
46
• AC, CD ve DB parçalarındaki kesitlerde eşdeğer iç kuvvet‐kuvvet çifti sistemlerini bulunuz.
A’dan C’ye: 2318 7200 x V 0
V 2318 7200 x
2318 x 7200 x 12 x M 0
M 2318 x 3600 x 2
C’den D’ye:
Fy 0 :
2318 2160 V 0
V 158 N
M2 0:
2318 x 2160 x 0.15 M 0
M 324 158 x N .m
47
Kesme Kuvveti ve Eğilme Momenti Diyagramları
D’den B’ye:
Fy 0 :
2318 2160 1800 V 0
V 1642 N
M
3
0:
2318 x 2160 x 0.15 180 1800 x 0.45 M 0
M 1314 1642 x N m.
48
A’dan C’ye:
V 2318 7200 x
M 2318 x 3600 x 2
C’den D’ye:
V 158 N
M 324 158 x N .m.
D’den B’ye:
V 1642 N
M 1314 1642 x N .m.
49
Uygulama: 50
Kesme Kuvveti ve Eğilme Momenti Diyagramları
51
Uygulama: Yük-Kesme Kuvveti-Eğilme Momenti Arasındaki Bağıntılar
• Kesit yöntemi geometri bakımından her türlü taşıyıcıya
uygulanabilen çok güçlü bir yöntem olmasına karşın,
süreksizliklerin sayısı arttığında işlemlerin sayısı da
artar.
• İşlem hacmindeki artış hata riskini de artırır. Bundan
kurtulmak için hesap kolaylığı olan bir yöntem
kullanmak gerekir.
• Bu yöntemin temelinde kesme kuvveti (T) ile eğilme
momenti (M) arasındaki ilişki yatar.
• Bu ilişki de sonsuz küçük bir çubuk elemanın serbest
cisim diyagramında yazılacak denge denklemleridir.
53
Yük-Kesme Kuvveti-Eğilme Momenti Arasındaki Bağıntılar
54
Yük-Kesme Kuvveti-Eğilme Momenti Arasındaki Bağıntılar
kesme kuvvetinin eğimi = yayılı yükün negatifi
eğilme momentinin eğimi = kesme kuvveti
55
Bu bağıntılar kirişin herhangi iki A ve B noktası arasında integre edilip,
ve sabitler dışarı alınırsa;
xB
VB VA w dx
xA
xB
M B M A V dx
xA
56
Herhangi iki nokta (A ve B) arasındaki
kesme kuvveti farkı, o iki nokta
arasındaki yük diyagramının alanının
negatifine eşittir.
Herhangi iki nokta (A ve B) arasındaki
moment farkı, o iki nokta arasındaki
kesme diyagramının alanına eşittir.
Yük-Kesme Kuvveti-Eğilme Momenti Arasındaki Bağıntılar
• Pratik Sonuçlar:
1) Kesme kuvvetinin sıfır olduğu kesitlerde moment maksimum yada
minimumdur.
2) Kesme kuvvetinin pozitif olduğu yerlerde (x) arttıkça moment büyür. Negatif
kesme kuvvetinde bunun tam tersi olur.
3) Kirişin belli bir parçasında M’deki değişme miktarı eğer dıştan ayrıca bir
moment etkimiyorsa kesme kuvvet diyagramının alanına eşittir.
4) İki kesit arasındaki kesme kuvveti farkı iki kesit arasındaki yük diyagramının
alanına eşittir.
5) Tekil yükün etkidiği noktada kesme kuvvetinin mutlak değeri o noktadaki tekil
yükün değerine eşittir.
6) Tekil kuvvetlerin etki ettiği noktada kesme kuvveti ani olarak değişir.
7) Kesme kuvvetinin ani değiştiği yerlerde moment diyagramında köşeler oluşur.
8) Yük olmayan bölgelerde kesme kuvveti diyagramı yataydır.
9) Yayılı yüklerde kesme kuvveti diyagramı doğrusal, moment diyagramı
paraboldur.
57
Yük-Kesme Kuvveti-Eğilme Momenti Arasındaki Bağıntılar
58
Yük-Kesme Kuvveti-Eğilme Momenti Arasındaki Bağıntılar
ÇÖZÜM:
Uygulama: • Tüm kirişi bir serbest cisim alarak mesnet tepkilerini bulunuz.
• Tekil yük uygulanan noktalar arasında kesme dV dx w 0
kuvveti sabittir, Şekildeki kirişte verilen yükleme
durumu için kesme kuvveti ve
eğilme momenti diyagramlarını
çiziniz.
59
• D ve E arasında düzgün yayılı yük olduğundan kesme kuvveti değişimi doğrusaldır.
• Tekil yük uygulama noktaları arasında dM/dx = V = sabittir. Yük uygulama noktaları arasında momentin değişimi, noktalar arasındaki kesme kuvveti eğrisinin altındaki alana eşittir.
• D ve E arasında kesme kuvveti doğrusal değiştiğinden eğilme momenti bir paraboldür.
ÇÖZÜM:
• Tüm kirişi bir serbest cisim alıp mesnet tepkilerini bulunuz.
MA 0:
D7.2 m 90 kN 1.8 m 54 kN 4.2 m
54 kN 8.4 m 0
D 117 kN
F y 0 :
A y 90 kN 54 kN 117 kN 54 kN 0
A y 81 kN
• Tekil yük uygulanan noktalar arasında dV dx w 0 ve kesme kuvveti sabittir.
• D ve E arasındaki yayılı yük nedeniyle kesme kuvveti doğrusal değişir
60
• Tekil yük uygulanan noktalar arasında dM/dx = V = sabittir. Yük uygulanan noktalar arasında momentin değişimi, noktalar arasındaki kesme kuvveti eğrisinin altındaki alana eşittir.
M B M A 145.8 M B 145.8 kN m
M C M B 21.6
M D M C 189
M C 124.2 kN m
M D 64.8 kN m
M E M D 64.8
ME 0
• D ve E arasında kesme kuvveti doğrusal değiştiğinden eğilme momenti diyagramı bir paraboldür.
61
Uygulama: • A noktasında nokta 7 birim yukarı hareket
ederek 1 noktasına ulaşır.
• Başka kuvvet olmadığı için 2. noktaya kadar
yatay üzerinde sağa doğru hareket eder.
• x = 2 m’de 10 kN’luk kuvvetle karşılaşılan
nokta, 2’den itibaren 10 birim aşağı iner ve
3’e ulaşır.
• 3’den 4’e kadar, nokta yatay üzerinde sağa
doğru hareket eder.
• 4’de 5 kN’luk kuvvetle karşılaşan nokta 5
birim daha aşağı hareket ederek 5 noktasına
ulaşır.
• 5’ten 6’ya yatay hareket eden nokta 6’da
karşılaştığı 8 kN’luk kuvvetle yukarı hareket
ederek B’ye ulaşır.
• Kesme kuvveti diyagramı alanından moment
diyagramı elde edilir.
Kesme kuvveti ve moment diyagramı düşey
denge ve moment denge koşulları nedeniyle
B noktasında kapanmalıdır.
62
10 kN
5 kN
A
B
2m
10 kN
2m
1m
5 kN
Ax
Ay=7 kN
By=8 kN
1
7
2
+
C
A
D
-
3
3
-
4
5
5
6
+
14
8
2
1
B
Kablolar
• Tekil yüklere maruz kablolar
• Yayılı yüklere maruz kablolar
• Kendi ağırlığına maruz kablolar
63
Kablolar
• Tekil yüklere maruz kablolar:
• Kablolar, asma köprüler, iletim hatları,
teleferikler, yüksek kulelerin gergileri, vs.
gibi birçok mühendislik uygulamasında
yapı elemanı olarak kullanılırlar.
• Analizler için varsayımlar:
a) Tekil yükler düşey doğrultudadır.
b) Kablo ağırlığı ihmal edilebilir.
c) Kablo bükülebilir dolayısıyla eğilmeye
karşı direnci düşüktür.
d) Tekil kuvvetler arasındaki kablo
parçası iki kuvvet elemanı olarak kabul
edilebilir.
• Kablonun şeklini, yani A mesnedinden her
yükleme noktasına olan düşey mesafeyi
belirlemeye çalışalım.
64
Kablolar
• Tüm kabloyu, serbest cisim olarak düşününüz. A ve B de kablonun eğimi bilinmiyor – her mesnette iki tepki bileşeni gerekiyor.
• Dört bilinmeyen var ve üç denge denklemi, tepkileri bulmak için yetersiz.
• İlave denklemler, kablonun AD kısmının
dengesini göz önüne alıp kablonun D
noktasının koordinatlarının bilindiğini kabul
edip elde edilebilir. Bu ilave denklem:
M
D
0.
• Kablo üzerindeki diğer noktalar,
M 0, y ' yi verir
F 0 ve F 0 ise T ve T ' yi verir
2
C2
x
y
Tx T cos A x sabit
65
A
E
yB
yD
12 m
D
B
15 kN
4 kN
3m
66
3 kN
C
5m
8m
2m
x
y
Ey
Ay
Ax
yB
B
Ex
yD
12 m
C
D
Fx 0
3 kN
Ax Ex 0
Ax Ex
15 kN
4 kN
3m 5m
ME 0
2m
8m
A y 18
4 15 15 10 3 2 0
A y 12 kN
Fy 0
A y E y 4 15 3 0
E y 10 kN
67
MC 0
12 kN
A x 12
12 8 4 5 0
A x E x 6.33 kN
Ax
yB
12 m
TBC cos BC A x 0
BC
B
TBC
4 kN
Fx 0
TBC cos BC 6.33 0
C
Fy 0
12 4 TBC sin BC 0
8 TBC sin BC 0
3m
68
5m
TBC 10.2 kN
BC 51.6o
10 kN
12 kN
Kablolar
10.2 kN
A
6.33 kN
Fx 0
AB
C
51.6o
TCD
C
D
E
ED
6.33 kN
15 kN
TAB
TED
TAB cos AB 6.33 0 TAB 13.6 kN
Fy 0
AB 62.2o
12 TAB sin AB 0
Diğer noktalar için de benzer işlemler yapılır.
•Maksimum kablo kuvveti eğimin en fazla olduğu kablo
parçasında meydana gelir.
•Kablolardaki sarkmalar trigonometri yoluyla belirlenir.
69
Kablolar
• Yayılı yüklere maruz kablolar:
T
70
• Yayılı yük taşıyan bir kablo için:
a) Kablo eğri şeklinde asılı kalır
b) İç kuvvet, eğriye teğet doğrultuda bir gerilme kuvvetidir.
• CD kablo parçasında kuvvetler, C de yatay T0 ile D
de teğetsel T kuvvetleridir.
• Kuvvet üçgeninden:
T cos T0
T sin W
T T02 W 2
tan
W
T0
• T’nin yatay bileşeni, kablo boyunca aynıdır.
Düşey bileşeni ise, en alt noktadan ölçülen W’nin
şiddetine eşittir.
• Gerilme kuvveti, en alt noktada minimum, A ve B
de maksimumdur.
Kablolar
• Kendi ağırlığına maruz kablolar (Zincir eğrisi): • Kendi ağırlığıyla düzgün yüklü bir kabloyu göz önüne alınız (Yani kendi ağırlığı altında asılı).
• En düşük noktası C den D noktasına kadar verilen kısmı üzerindeki yükü W = w x olan kablonun iç gerilme kuvvetinin şiddet ve yönü
T T02 w 2 s 2 w c 2 s 2
T
c 0
w
• Yatay mesafe x ile kablo uzunluğu s arasında bir bağıntı bulmak için T
ds
dx ds cos 0 cos
T
q s2 c2
s
x
0
ds
q s2 c2
c sinh1
s
x
ve s c sinh
c
c
71
Kablolar
• Kablo koordinatları x ve y arasında bağıntı bulmak için dy dx tan
W
s
x
dx dx sinh dx
T0
c
c
x
x
x
y c sinh dx c cosh c
c
c
0
y c cosh
x
c
bulunur ki bu bir zincir eğrisidir.
72
BÖLÜM 9: Ağırlık Merkezi ve Geometrik Merkez
Giriş
• Parçacık Sisteminin Ağırlık Merkezi ve Kütle Merkezi
• Bir Cismin Ağırlık Merkezi ve Geometrik Merkezi
• Yaygın Kullanılan Alanların Geometrik Merkezleri
• Bileşik Cisimler
• Pappus‐Guldinus Teoremleri
1
Parçacık Sisteminin Ağırlık Merkezi ve Kütle Merkezi
Ağırlık Merkezi:
Ağırlık merkezi G, parçacık sistemlerinde toplam ağırlığın belirli
bir uygulama noktasına tek bir (eşdeğer) bileşke ağırlık olarak
uygulandığı noktadır.
Parçacıkların ağırlıkları paralel kuvvet sistemi olarak ele alınır.
Ağırlık sistemi toplam ağırlığın tek bir ağırlık olarak ağırlık
merkezine etki ettiği bir sistemle değiştirilebilir.
2
Parçacık Sisteminin Ağırlık Merkezi ve Kütle Merkezi
Ağırlık Merkezi:
3
Parçacık Sisteminin Ağırlık Merkezi ve Kütle Merkezi
Ağırlık Merkezi:
n
WR Wi
Toplam ağırlık
i1
x konumu:
x R WR ~x1 W1 ~x2 W2 ~x3 W3 ~xn Wn
y konumu:
y R WR ~
y1 W1 ~
y 2 W2 ~
y 3 W3 ~
y n Wn
z konumu:
z R WR ~z1 W1 ~z2 W2 ~z3 W3 ~zn Wn
4
Parçacık Sisteminin Ağırlık Merkezi ve Kütle Merkezi
Ağırlık Merkezi:
n
x
x W
i1
n
i
i
W
n
y
i
i1
y W
i1
n
i
i
W
n
z
i
i1
z W
i1
n
i
i
W
i
i1
x, y, z
xi , yi , zi
i. parçacığın koordinatları
Wi
i. parçacığın ağırlığı
ağırlık merkezinin koordinatları
5
Parçacık Sisteminin Ağırlık Merkezi ve Kütle Merkezi
Kütle Merkezi:
n
x
x m
i1
n
i
m
i1
6
i
i
n
y
y m
i1
n
i
i
m
i1
n
z
i
z m
i1
n
i
m
i1
x, y, z
xi , yi , zi
kütle merkezinin koordinatları
mi
i. parcacığın kütlesi
i. parçacığın koordinatları
i
i
Bir Cismin Ağırlık Merkezi ve Geometrik Merkez
Sonsuz sayıda parçacıktan oluşan bir cismi ele alalım
7
Bir Cismin Ağırlık Merkezi ve Geometrik Merkez
x
x W
i1
i
W
i1
8
i
i
y
y W
i1
i
i
W
i1
i
x, y, z
xi , yi , zi
i. parçacığın koordinatları
Wi
i. parçacığın ağırlığı
z
z W
i1
i
i
W
i1
i
ağırlık merkezinin koordinatları
Sonsuz sayıda parçacık varsa sürekli hesap için integral kullanmak gerekir.
Bir Cismin Ağırlık Merkezi ve Geometrik Merkez
x
~x dW
dW
y
~
y dW
dW
z
~z dW
dW
= cismin özgül ağırlığı (birim hacmin ağırlığı)
dW dV
x
~x dV
V
dV
y
~
y dV
V
dV
V
z
V
~z dV
V
dV
V
9
Bir Cismin Ağırlık Merkezi ve Geometrik Merkez
Geometrik Merkez ‐ Hacim:
x
~x dV
V
dV
V
10
y
~
y dV
V
dV
V
z
~z dV
V
dV
V
Bir Cismin Ağırlık Merkezi ve Geometrik Merkez
Geometrik Merkez ‐ Alan:
x
~x dA
A
dA
y
A
~
y dA
A
dA
z
~z dA
A
dA
A
A
11
Bir Cismin Ağırlık Merkezi ve Geometrik Merkez
Geometrik Merkez ‐ Çizgi:
x
~x dL
L
dL
L
12
y
~y dL
L
dL
L
z
~z dL
L
dL
L
Bir Cismin Ağırlık Merkezi ve Geometrik Merkez
Bazı şekillerin geometrik merkezleri
13
Uygulama: Şekildeki eğik çubuğun geometrik merkezini bulalım.
dL
dx 2 dy 2
dL
x y2
dx
1 dy
dy
2
dx
2y
dy
dL
14
2y 2 1 dy
~xdL
x
L
dL
1
L
0 x
1
0
2y 2 1 dy
2y 2 1 dy
x y2
1
4y 1 dy 0.6063
0.410 m
1.479
4y 1 dy
2
y
x
0
2
1
2
0
15
y
~
y dL
L
dL
1
L
y
0
1
0
2y 2 1 dy
2y 2 1 dy
4 y 1 dy
1
y
2
1 dy
y
4
y
0
1
0
16
2
0.8484
0.574 m
1.479
Uygulama: Şekildeki dairesel telin geometrik merkezini bulalım.
2
x
R cos Rd
xdL
L
dL
0
2
2
R 2 cos d
0
2
Rd
L
L
dL
L
0
2
Rd
2R
2
R
2
sin d
0
2
R d
0
0
17
Uygulama: Şekildeki alanın geometrik merkezini bulalım.
Şerit yöntemi:
dA x dy
b
dA h y dy
h
1b
x h y
2h
y y
18
0
2
y
2R
R d
0
R sin Rd
ydL
h
b
y
h
y
dy
h
yA
0h
A dA b h y dy
h
0
y dA
x
x
A
h
dA
dA
1b
1 2
bh
h
6
y
1
bh 3
2
b
2 h h y h h y
dy
0
b
h
y
dy
0 h
h
A
1 2
b h
b
6
x
1
3
b h
2
19
y
y = (h/b) (b - x)
h
y
~x , ~y
y dA
A
dA
h
(b-x)
b b
0
dy
ydydx
0
h
(b-x)
b b
A
0
b
h2
0
2b
2
(b - x) 2 dx
1
2
bh
dydx
0
dx
b
x
b
Çift integral yöntemi:
dA dx dy
~
xx
~
yy
20
y
0
h2
2b
2
1
2
(b - x)2 dx
bh
1 2
bh
h
6
y
1
bh 3
2
-h 2
6b
2
1
2
(b - x)3
bh
Yaygın Kullanılan Alanların Geometrik Merkezleri
21
Yaygın Kullanılan Alanların Geometrik Merkezleri
22
Bileşik Cisimler
Eğer bir cisim daha basit şekilli birçok parçadan oluşuyorsa ağırlık
merkezi ve geometrik merkezin hesaplanmasında alan yöntemi
kullanılabilir.
Alan Yöntemi:
Cisim hesaplanabilir daha basit parçalara bölünür.
Eğer cisimde delikler veya çıkarılmış kısımlar varsa bunlar negatif alan olarak hesaplanır.
Her bir alt parçanın merkezi simetri çizgisi üzerindedir.
Bir tablo oluşturarak geometrik merkez hesaplanır.
23
Uygulama: Şekildeki alanın geometrik merkezini bulalım.
24
Çözüm 1:
4
xA
0.348 m
11.5
A
14
yA
1.22 m
y
11.5
A
x
3m
3
2
1m
2m
1m
1
3m
Parça
A (m2)
x (m)
y (m)
x.A
y.A
1
4.5
1
1
4.5
4.5
2
6
‐1
1.5
‐6
9
3
1
‐2.5
0.5
‐2.5
0.5
∑
11.5
‐4
14
25
Çözüm 2:
3
3m
2
1m
1m
1
3m
2m
Parça
A (m2)
x (m)
y (m)
x.A
y.A
1
4.5
1
1
4.5
4.5
2
9
‐1.5
1.5
‐13.5
13.5
3
‐2
‐2.5
2
5
‐4
∑x.A=‐4
∑y.A=14
∑A=11.5
26
xA
4
x
0.348 m
11.5
A
14
yA
y
1.22 m
A 11.5
Uygulama: Şekildeki alanın geometrik merkezini bulalım.
27
28
• Alanın geometrik merkezinin hesaplanması:
x A 757.7 10 3 mm 3
A 13.828 103 mm 2
X
X 54.8 mm
y A 506.2 103 mm 3
Y
A 13.828 103 mm 2
Y 36.6 mm
29
Uygulama: Şekildeki alanın geometrik merkezini bulalım.
1m
1m
1m
1m
3m
30
Çözüm 1:
1m
2
1m
3
1
5
4
1m
1m
3m
Alt alanlara ayıralım
31
Parça
1
2
3
4
5
Alan
1.0
1.0
1.5
3.0
‐0.7854
x
0.5
0.5
2.0
2.5
0.42441
5.71460
x =
y =
32
1.95406 0.90412
y
0.5
1.5
1.33333
0.5
0.42441
x.A
0.5
0.5
3.0
7.5
‐0.33333
y.A
0.5
1.5
2.0
1.5
‐0.33333
11.16667
5.16667
Çözüm 2:
Parça
1
2
3
Alan
8
‐0.7854
‐1.5
x
y
xA
2
1
16
0.424413 0.424413 ‐0.33333
3
1.666667
‐4.5
5.714602
x=
y=
yA
8
‐0.33333
‐2.5
11.16667 5.166667
1.954059
0.904117
33
Pappus-Guldinus Teoremleri
Pappus‐Guldinus teoremleri, dönel bir cismin yüzey alanını veya hacmini
bulmak amacıyla kullanılır.
• Dönel yüzey, düzlemsel
bir eğrinin sabit bir ekse‐
ne göre döndürülmesiyle
elde edilen bir yüzeydir.
Küre
Koni
Tor
• Bir dönel yüzeyin alanı, yüzeyi meydana
getiren eğrinin boyu ile yüzey oluşturu‐
lurken eğrinin geometrik merkezinin kat
ettiği mesafenin çarpımına eşittir.
A 2 yL
34
Pappus-Guldinus Teoremleri
Küre
Koni
Tor
• Dönel cisim, düzlemsel bir alanın sabit bir eksene
göre döndürülmesiyle elde edilen bir cisimdir.
• Bir dönel cismin hacmi, cismi meydana
getiren alan ile cisim oluşturulurken
alanın geometrik merkezinin kat ettiği
mesafenin çarpımına eşittir.
V 2 y A
35
Pappus-Guldinus Teoremleri
Uygulama: Bir makaranın dış çapı 0,8 m olup kesiti şekilde gösterilmiştir. Makara
çelikten yapıldığına ve çeliğin yoğunluğunun ρ=7.85x103 kg/m3 olduğu bilindiğine
göre, makaranın kütle ve ağırlığını bulunuz.
36
Pappus-Guldinus Teoremleri
m V 7.85 103 7.65 106
m 60.0 kg
W mg 60.0 9.81
W 589 N
37