T.C.
KARADENİZ TEKNİK ÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
GÜNEŞ ENERJİLİ BARİYER OTOMATI
243481 Volkan DENİZ
228569 Deniz GEZENER
Doç. Dr. H. İbrahim OKUMUŞ
Mayıs 2014
TRABZON
T.C.
KARADENİZ TEKNİK ÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
GÜNEŞ ENERJİLİ BARİYER OTOMATI
243481 Volkan DENİZ
228569 Deniz GEZENER
Doç. Dr. H. İbrahim OKUMUŞ
Mayıs 2014
TRABZON
LİSANS BİTİRME PROJESİ ONAY FORMU
Volkan DENĠZ ve Deniz GEZENER tarafından Doç. Dr. H. Ġbrahim OKUMUġ
yönetiminde hazırlanan “GüneĢ Enerjili Bariyer Ototmatı” baĢlıklı lisans bitirme projesi
tarafımızdan incelenmiĢ, kapsamı ve niteliği açısından bir Lisans Bitirme Projesi olarak
kabul edilmiĢtir.
DanıĢman
: Doç. Dr. Halil Ġbrahim OKUMUġ
Jüri Üyesi 1
: Prof. Dr. Adem Sefa AKPINAR
Jüri Üyesi 2
: Prof. Dr. Ġsmail Hakkı ALTAġ
Bölüm BaĢkanı
: Prof. Dr. Ġsmail Hakkı ALTAġ
iii
iv
ÖNSÖZ
Projemizin tasarım ve yapım aĢamasında, bize her türlü desteğini sağlayan baĢta
danıĢman hocamız Doç. Dr. H. Ġbrahim OKUMUġ olmak üzere, bu çalıĢmayı destekleyen
Karadeniz Teknik Üniversitesi Rektörlüğü’ne, Mühendislik Fakültesi Dekanlığına ve
Elektrik-Elektronik Mühendisliği Bölüm BaĢkanlığına teĢekkürlerimi sunarım. Ayrıca
öğrenim hayatımız boyunca bizden desteklerini esirgemeyen tüm hocalarımıza ve
asistanlarına teĢekkürlerimizi sunuyoruz.
Her Ģeyden öte, eğitimimiz süresince bize her konuda destek veren
ailelerimize saygı ve sevgilerimizi sunarız.
Mayıs 2014
Volkan DENĠZ
Deniz GEZENER
v
vi
İÇİNDEKİLER
LĠSANS BĠTĠRME PROJESĠ ONAY FORMU...........................................................iii
ÖNSÖZ...........................................................................................................................v
ĠÇĠNDEKĠLER............................................................................................................vii
ÖZET.............................................................................................................................ix
SEMBOLLER VE KISALTMALAR...........................................................................xi
ġEKĠLLER DĠZĠNĠ......................................................................................................xii
ÇĠZELGELER LĠSTESĠ..............................................................................................xiii
1. GĠRĠġ.......................................................................................................................1
2. TEORĠK ALTYAPI.................................................................................................3
2.1. Arduino..............................................................................................................3
2.1.1. Arduino’nun Temel Donanım Özellikleri...............................................3
2.1.2. Arduino’nun Uygulamarda Tercih Edilme Nedenleri............................4
2.1.3. Arduino UNO R3...................................................................................4
2.1.3.1. Arduino Uno R3’ün Teknik Özellikleri.....................................5
2.2. RFID Teknolojisi...............................................................................................5
2.2.1. RC522 RFID NFC Kiti...........................................................................6
2.3. DA Motor Kontrolü...........................................................................................7
2.3.1. L293D Entegresi.......................................................................................7
3. TASARIM AġAMALARI........................................................................................10
3.1. GüneĢ Enerjisi Sisteminin Tasarımı...................................................................10
3.1.1. Sistem BileĢenleri....................................................................................10
3.1.1.1. GüneĢ Paneli................................................................................10
3.1.1.2. Akü ġarj Regülatörü....................................................................11
3.1.1.3. Akümülatör..................................................................................12
3.2. Bariyer Sisteminin Tasarımı..............................................................................13
3.2.1. Mekanik Aksan........................................................................................13
3.2.2. Elektronik Aksan.....................................................................................14
3.2.2.1. RFID Teknolojisi Ġle Bariyer Kontrol Sisteminin Tasarımı.......15
4. SĠMÜLASYON ÇALIġMASI.................................................................................16
4.1. Motor Sürücü Simülasyonu..............................................................................16
vii
5. DENEYSEL ÇALIġMALAR..................................................................................17
5.1. Motor Sürücü Devresinin Gerçeklenmesi.........................................................17
5.2. Bağlantıların Yapılması....................................................................................19
6.SONUÇLAR.............................................................................................................20
7. YORUMLAR VE DEĞERLENDĠRME.................................................................21
KAYNAKLAR............................................................................................................22
EKLER.........................................................................................................................23
EK-1. Etik Kuralları...................................................................................................23
EK-2. Disiplinler Arası ÇalıĢma................................................................................25
EK-3. ÇalıĢma Takvimi.............................................................................................26
EK-4. Maliyet Hesabı................................................................................................28
EK-5. Arduino Yazılım Kodları................................................................................29
EK-6. Standartlar ve Kısıtlar Formu.........................................................................31
ÖZGEÇMĠġLER.........................................................................................................34
viii
ÖZET
GeliĢen teknoloji ile birlikte geçiĢ sistemlerinin ehemmiyeti de ortaya çıkmıĢtır.
Günümüzde geçiĢ sistemleri çok sayıda farklı cihazlar kullanarak faaliyetlerini devam
ettirmektedir. Bu konuya dair birçok ürün bulunmaktadır. Bu projede sanayi, otoyol ve
halka açık yerleĢim alanlarında kullanabileceğimiz güneĢ enerjili bariyer otomat sistemi
tasarlanmıĢtır.
Bu çalıĢmada yenilenebilir enerji kaynaklarından güneĢ enerjisi kullanarak hızla
tükenmekte veya azalmakta olan birincil enerji kaynaklarına ve bu kaynakların enerji
üretimi için yakılmaları esnasında ortaya çıkan ekolojik bozulmalara da proje kapsamında
bir çözüm getirilmiĢtir. GüneĢ enerjisi gibi yenilenebilir enerjinin öneminin gün geçtikçe
artmasına insanların yaĢamlarını nasıl daha rahat, sağlıklı ve doğal hale getirebileceği
üzerine araĢtırmalar ve çalıĢmalar yapılmıĢtır. Bariyer otomasyonu hakkında gerekli
bilgiler verildikten sonra, bariyer sisteminin RFID teknolojisi ile uzaktan kontrolü analizi
yapılmıĢtır.
Sistemin tasarımı esnasında devre elemanlarının belirlenen değerleri, gerekli olan
yardımcı program simülasyonları ile pekiĢtirilmiĢtir. Sonra sistemin tasarlanmasında
kullanılan malzeme seçimleri ve sistemin hangi unsuru oluĢturacakları belirtilmiĢtir. Daha
sonrasında tasarım gerçekleĢtirilip, deneysel sonuçları gözlemleyerek ilgili sonuç ve
öneriler belirtilmiĢtir.
ix
x
SEMBOLLER VE KISALTMALAR
IDE
: TümleĢik GeliĢtirme Ortamı
USB
: Evrensel Seri Veri Yolu
LED
: IĢık Yayan Diyot
MHz
:Mega Hertz
SRAM
: Statik Rastgele EriĢimli Hafıza
EEPROM : Elektrikle Silinip Programlanabilir Salt Okunur Bellek
SDA
: Seri Data Hattı
SCL
: Seri Clock Hattı
AREF
: Analog Referans
V
: Volt
ADC
: Analog Dijital DönüĢtürücü
KB
: Kilo Bayt
NFC
: Yakın Alan ĠletiĢimi
AGM
: Aserbed Glass Mad
GEL
: Gelled Electro Lyte
RFID
: Radyo Frekanasıyla Tanımlama
DC/DA
: Doğru Akım
PWM
: Darbe GeniĢlik Modülasyonu
mA
: Mili Amper
GND
: Toprak
xi
ŞEKİLLER DİZİNİ
Şekil 1. L293D motor sürücü entegresi
Şekil 2. GüneĢ paneli
Şekil 3. Bariyerin mekanik aksanı
Şekil 4. Motor Sürücü simülasyon devresi
Şekil 5. Motor Sürücü baskı devresinin yerleĢim dizaynı
Şekil 6. Motor sürücü baskı devresi
Şekil 7. GerçeklenmiĢ olan motor sürücü devresi
Şekil 8. Devrelerin bağlantı görüntüsü
xii
ÇİZELGELER LİSTESİ
Çizelge 1. RC522 RFID NFC kiti özellikleri
Çizelge 2. GüneĢ paneline ait katalog bilgileri
Çizelge 3. Akü Ģarj regülatörüne ait katalog bilgileri
Çizelge 4. 6V 1.3Ah Aküye ait katalog bilgileri
Çizelge 5. 6 Volt DC motora ait katalog bilgileri
xiii
xiv
1. GĠRĠġ
Gelişen teknoloji ile birlikte enerji tüketimi gün geçtikçe hızlı bir şekilde artmaktadır.
Bundan dolayı fosil kaynaklarımız sürekli tüketilmektedir. İnsanlar gelecekte bu durumdan
oluşacak sorunların önüne geçmek ve bu kaygılarını azaltmak amacıyla yenilenebilir enerji
kaynaklarından olan güneş enerjisine yönelmişler ve bu güneş enerjisinden çeşitli alanlarda
yararlanmaya başlamışlardır. Bu alanda yapılan çalışmalardan biri de güneş enerjisi ile
çalışan bariyer otomasyonlarıdır.
Otomasyon, bir sistemin hazırlanmış planlara göre başka bir operatöre ihtiyaç
duymadan
planlanan
işlemlerin
gerçekleştirilmesi
olarak
tanımlanabilir.
Bariyer
otomasyonu ise otoparklar ve kontrol geçiş noktalarındaki düzen ve güvenliliği sağlamak
amacıyla kullanılan sistemlerdir. Bu sistemler sayesinde insanların topluluk halinde
yaşadığı ortamlarda belli bir düzen oluşturulmakta ve oluşabilecek kargaşaların önüne
geçilebilmektedir. Bariyer otomasyonlarının birçok kullanım nedenleri vardır. Enerji
tasarrufu ve verimlilik bu nedenlerin başında gelmektedir.
Gelişen teknoloji ile birlikte bariyer sistemleri de gelişmekte ve sadece açılıp kapanan
bir koldan daha çok entegre edildikleri geçiş kontrol ve personel devam kontrol sistemleri
ile tüm geçiş verilerinin depolanması, geçişlerin yetkilendirilmesi, yabancı araçların
tanınması gibi uygulamalarla güvenlik sistemlerinin en önemli unsurlarından biri haline
gelmiştir.
Tasarımı
yapılan
bu projede
radyo
frekansı
ile
tanımlama
teknolojisinden
yararlanılmıştır. Radyo frekansı ile tanımlama (RFID), genel olarak etiketler üzerinden
radyo dalgalarıyla canlıları ya da nesneleri otomatik olarak uzaktan tanımak amacıyla
kullanılan teknoloji olarak tanımlanmaktadır. Kablosuz haberleşme teknolojisi ve bir
otomatik tanımlama sistemi olan RFID, fabrikalardaki depolardan alış-veriş yaptığımız
marketlere kadar değişik iş alanlarında, bilgi teknolojilerinde kısacası dinamik bir verimin
kullanabileceği ya da gereksinim duyabileceği her alanda uygulanılabilir.
1
RFID teknolojisi ile çalışan otomatik bariyer sistemleriyle;
Güvenlik bölgeleri yaratılmakta.
Araç trafiği kontrol altında tutulmakta.
Bina girişlerinde kontrol noktası oluşturulmakta.
İnsan trafiği düzene sokulmakta.
Konut otoparklarında yabancı araçların girmesi engellenmektedir.
Bu projede yukarıda anlatılan ve örnekler verilen güneş enerjili otomatik bariyer
sisteminin bir örneği yapılmıştır. Bariyer otomasyon sisteminde kontrol edilen sistemler ve
bu sistemlerin nasıl gerçekleştirildiği diğer aşamalarda anlatılmıştır.
Bu projenin yapımını takvimsel olarak gösteren çalışma takvimi EK-3'te verilmiştir.
2
2. TEORĠK ALTYAPI
2.1. Arduino
Arduino; temel olarak açık kaynaklı donanıma dayalı bir fiziksel programlama
platformudur.
Arduino’nun
bağlı
olduğu
sistemler
sayesinde
mikroişlemciler
programlanabilir. Yani Arduino ile istediğimiz gibi kodlar yazarak, uygun elektronik
devrelere ve mikroişlemcilere uyarlayıp projeler geliştirebiliriz.
Arduino bir mikroişlemci değildir, mikroişlemciler için kolaylaştırıcı bir geliştirme
ortamı sunar. Arduino tek başına çalışan ve enteraktif nesneler geliştirmek için
kullanılabileceği gibi bilgisayar üzerinde çalışan yazılımlara da bağlanabilir.
Arduino geliştirme kartı üzerinde mikroişlemci (ATmegaxx) Arduino programlama dili
(wiring tabanlı) ile programlanırak processing tabanlı Arduino Yazılım ve Geliştirme
Ortamı (IDE) yardımı ile karta yüklenir.
Arduino yapısal olarak; programlama için USB seri bağlantısı, entegre LED, girdi çıktı
pimleri, güç girişi ve RESET düğmesinden oluşmaktadır.
2.1.1. Arduino Temel Donanım Özellikleri
ATmega mikroişlemci
5 Voltluk regüle entegresi
16 MHz kristal osilator ya da seramik rezonatör
Flash bellek
SRAM
EEPROM
3
2.1.2. Arduino’nun Uygulamalarda Tercih Edilme Nedenleri
Çevresi ile kolay bir şekilde etkileşime girebilen sistemler tasarlanabilir.
Açık kaynaklı bir geliştirme platformudur.
Arduino kartlarında Atmega firmasının 8 ve 32 bit mikro denetleyicileri bulunur.
Arduino, kütüphaneleri sayesinde mikro denetleyicileri kolaylıkla programlanabilir.
Analog ve sayısal girişleri ile analog ve sayısal verileri işlenebilir.
Sensörlerden (transdüser) gelen veriler kullanılabilir.
Ses, ışık, hareket gibidış dünya çıktıları üretilebilir.
2.1.3. Arduino UNO R3
Arduino UNO R3, Arduino UNO’nun en son çıkan modelidir. Bundan önceki
modellerde bulunan tüm özellikleri desteklemektedir. UNO R3 modeli ile birlikte önceki
versiyonlardaki 8U2 modeli yerine 16U2 modeli kullanılmıştır. Bu şekilde daha hızlı veri
aktarımı daha az hafıza kullanılarak gerçekleştirilmiştir. Linux ve Mac bilgisayarlarda
Arduino’yu bilgisayara bağlamak için herhangi bir sürücüye ihtiyaç yoktur. Windows
bilgisayarlarda Arduino IDE yazılımı içinde gelen inf dosyasını bilgisayarımıza
tanıtmamız yeterlidir.
UNO R3 ekstradan SDA ve SCL pimlerine sahiptir. Bu pinler kart yerleşiminde AREF
pininin yanında bulunmaktadır. Bununla birlikte kart üzerinde önceki versiyonlardan farklı
olarak reset pininin yanında iki yeni pin eklenmiştir. Biri shieldlere kart üzerinden besleme
sağlamak amacıyla IOREF pini diğeri ise ileride kullanılmak üzere ayrılmış boş bağlantısız
pindir. UNO R3 piyasada bulunan tüm shieldler ile uyumlu olup yeni pinler ile de bundan
sonra üretilecek olan yeni shieldlere de uyumlu haldedir.
4
2.1.3.1. Arduino UNO R3’ ün Teknik özellikleri
ATmega328 mikrodenetleyici
7-12v giriş voltajı
14 dijital güç pini
6 ADC girişi
16 MHz çalışma frekansı
32 KB Flash hafıza
2.2. RFID Teknolojisi
“RFID kelimesi İngilizce Radio Frequency Identification kavramının bas harflerinin
kısaltılmasıyla meydana gelir. Türkçeye Radyo Frekansı ile Tanımlama olarak da
çevrilebilecek olan bu sistemlerin en temel özelliği sistem içindeki birimlerin birbirleriyle
radyo frekansları olarak tabir edilen bir frekans aralığında haberleşmesidir.“
[1]
RFID teknolojisi, belirli bir mesafeden canlı ve cansız her türlü objenin temas olmaksızın
tanınmasında ve takip edilmesinde kullanılır. RFID teknolojileri giderek artarakülkemizde
ve dünya genelinde yaygınlaşmakta ve birçok sektörde aktif olarak kullanılmaktadır.
RFID teknolojisi, iş akışlarını hızlandırmakta, verimliliği ve kararlılığı artırmaktave
operasyonel maliyetleri oldukça düşürmektedir. RFID teknolojisi dört temel elemandan
oluşmaktadır.
RFID etiket
RFID yazıcı
RFID okuyucu
Programlama aracı
RFID sisteminde; tanınmak istenen nesnelere RFID etiketdoğrudan yerleştirilir. RFID
etiketindeki çipe kaydedilmiş verileri okumak için gerekli haberleşme, etiketin içinde
bulunan anten ile okuyucu arasındaki radyo frekans sinyaller sayesinde sağlanır. RFID
etiket, okuma alanına girdiği zaman okuyucu tarafından algılanır ve çipin kendi koduyla
birlikte içinde kayıtlı bilgileri anteni aracılığı ile okuyucuya temassız ve kablosuz bir
şekilde gönderir.
5
RFID okuyucular, etiketlerin içindeki kayıtlı bilgilerin okunarak sisteme iletilmesi
görevini yaparlar. Okuyucular da antenin hassasiyetine, çiplerin gücüne, frekansına, RFID
etiketinin pasif ve aktif olmasınagibi etkenlere bağlıdır.
RFID yazıcılar ise bilgilerin okunmasında, güncellenmesinde ve etiketlerin içindeki
çiplere bilgi kaydedilmesinde kullanılırlar.
2.2.1. RC522 RFID NFC Kiti
RC522 RFID kartı, NFC frekansı olan 13,56 MHz frekansta çalışan, etiketler üzerinde
okuma ve yazma işlemeni yapabilen, düşük güç harcayan, küçük boyutlu bir karttır.
RC522 RFID NFC kiti Arduino başta olmak üzere bir çok mikrodenetleyeci platformu
ile beraber rahatlıkla kullanılabilir. 424 kbit/s haberleşme hızına sahiptir. RFID üzerinde
farklı şifreleme türlerini desteklemektedir. Desteklediği kart türleri ve mifare desfire,
mifare pro, mifare ultralight,mifare1 S50 ve mifare1 S70'dir. Bu kite ait özellikler
Çizelge 1’de verilmiştir.
Kit içeriği;
RC522 13,56 MHz NFC okuyucu modülü
13,56 MHz NFC kart
13,56 MHz NFC anahtarlık
Headerlar
Çizelge 1. RC522 RFID NFC kiti özellikleri
Çalışma Gerilimi
3,3V
Çalışma Frekansı
13,56 MHz
Çalışma Akımı
13-26mA
Uyku Akımı
<80 uA
Haberleşme Protokolü
SPI
Kart Boyutları
40x60mm
6
2.3. DA Motor Kontrolü
Elektrik enerjisinden mekanik enerji elde edebilemek için kullanılan elektrik
makinelerine doğru akım motoru adı verilir. “Doğru akım makineleri dönen kısım
(endüvi), duran kısım (endüktör), yatak, kapak, fırça ve kolektörden oluşur.“ [2]
“DA motoru, içinden akım geçen iletkenin manyetik ortam dışına itilmesi prensibine
göre çalışır. Motorlarda manyetik alanı endüktör oluşturmaktadır. İçinden akım geçen
iletkenler ise endüvi üzerinde bulunur. Endüvi üzerideki iletkenlere fırça ve kolektör
yardımıyla doğru gerilim uygulanır. Böylece endüvi üzerideki iletkenden akım geçer ve
manyetik alan oluşur. Endüktör sargısının manyetik alanı (N–S), endüvide üzerinde
manyetik alan oluşturan iletken veya iletken demetini dışa doğru iter. Bu itilme, mil
etrafında dönmeyi meydana getirir. Bu itilme prensibi, doğru akım motorlarının çalışma
esasını oluşturur.“ [2]
DA motorları ile günümüzde çeşitli büyüklüklerin kontrolünü yapılmaktadır. DA
motorların kontrolde tercih edilme nedenleri;
Ucuz, küçük ve etkili olmaları.
Boyut, şekil ve güç bakımından çok çeşitli olmaları.
DA motorlarının herhangi bir sistemde doğrudan veya dişli kutularıyla birlikte
kullanılabilmeleri.
Mikro denetleyicilerin çıkışları direkt DA motorlarını sürmekte yetersizdir. Motorları
sürmek için bundan dolayıçıkışlarını yükseltilir. Bunun için ise transistörveya özel motor
sürücü entegreler kullanılır.
2.3.1. L293D Entegresi
L293D entegresi içinde iki adet H köprüsü bulunduran, 16 bacaklı motor sürücü
entegresidir. Burada sözü edilen H köprüsü devreleri, transistörler (4 transistör) yardımı ile
DA motorlarının doğrudan elektrik sinyalleri vasıtasıyla kontrol edilebilmesi amacıyla
hazırlanan devrelerdir.
7
“L293D, denetim kartlarının yüksek voltaj ve akım gereksinimi olan elemanları (motor,
röle) kontrol etmesi için kullanılır. Motorun ihtiyaç duyduğu akım, denetim kartının
verebileceğinden fazla olduğundan gerilim ve akımı arttırmak için sürücü devreleri
kullanılmalıdır, aksi takdirde denetim kartının yanmasına sebep olunabilir.“ [3]
L293D entegresinin özellikleri;
Sağ ve sol tarafın birbirinden bağımsız oalrak çalışabilmesi.
Bir adet L293D ile iki adet motor çift yönlü olarak kontrol edebilir.
L293D entegresi, 5V ile 36V aralığında en fazla 600mA akım sınırına kadar
kullanılabilir.
L293’nin enable bacakları kullanılarak PWM kontrolüyapılabilmektedir.
ġekil 1’de L293D motor sürücü entegresi verilmiştir.
Şekil 1. L293D motor sürücü entegresi
8
L293D entegre devresinin kurulumu;
İlk olarak 4, 5, 12 ve 13 numaralı bacaklar birleştirilerek toprak olarak kullanılır.
Motorlar 3 ile 6 ve 11 ile 14 numaralı bacaklara bağlanır.
1 ile 16 numaralı bacaklara 5V uygulanır.
2 ile 7 numaralı bacaklar birinci motoru, 10 ile 15 numaralı bacaklar ikinci motoru
çalıştırır.
8 numaralı bacaktan ise motora uygulanacak gerilim verilir.
9
3. TASARIM AġAMALARI
Güneş enerjili bariyer otomatı 2 aşamada gerçekleştirilmiştir.
3.1. Güneş Paneli Sistemi Tasarımı
3.2. Bariyer Sisteminin Tasarımı
3.2.1. Mekanik Aksan
3.2.2. Elektronik Aksan
3.1. GüneĢ Enerjisi Sisteminin Tasarımı
Bu kısımda projede enerji kaynağı olarak kullanılan güneş enerjisi sistemi ayrıntılı
olarak sunulmuştur. Tasarlanılan bu güneş enerjisi sisteminde, üretilen enerji akümülatörde
depolanmış ve bu depolanan enerji bağlantı kabloları vasıtasıyla bariyere aktarılmıştır.
3.1.1. Sistem BileĢenleri
Güneş enerjisi sistemleri temel olarak; güneş paneli, akümülatör, şarj regülatörü ve
eviricinin yanısırabazı güneş panellerinin maksimum güç noktasında çalışması için
kullanılan maksimum güç noktası izleyici cihazı gibi çeşitli elektronik devrelerden oluşur.
Bu projede DC gerilim ile çalışıldığından bir eviriciye ihtiyaç duyulmamıştır. Proje
kapsamında kurulan sistemin temel bileşenleri (güneş paneli, akü şarj regülatörü ve akü)
kısımda kısaca tanımlanmıştır.
3.1.1.1. GüneĢ Paneli
Güneş paneli, güneş ışınlarını elektrik enerjisine dönüştüren güneş enerjisi sisteminin
temel elemanıdır. Bir yarı iletken diyot görevi yapan güneş hücresi, güneş ışığının taşıdığı
enerjiyi iç fotoelektrik reaksiyonlar ile doğrudan elektrik enerjisine çevirir. ġekil 2’de
tasarımı yapılan projede kullanılan güneş paneli, Çizelge 2’de ise bu panele ait katalog
bilgileri verilmiştir.
10
Şekil 2. Güneş paneli
Çizelge 2. Güneş paneline ait katalog bilgileri
Maksimum Güç (Pmax)
20W
Maksimum Güç Gerilimi (Vmp)
18.20V
Maksimum Güç Akımı (Imp)
1.10A
Açık Devre Gerilimi (Voc)
21.59V
Kısa Devre Akımı (Isc)
1.28A
Hücre Tipi
Kristal
Boyutlar
550x308x25mm
Ağırlık
2.5Kg
3.1.1.2. Akü ġarj Regülâtörü
Güneş panelinden gelen akımın düzenlenerek aküye aktarılmasını sağlar. Akünün aşırı
kullanımlarda boşalmasını ve tam dolmasını engeller. “Bir regülatör tasarlarken dikkat
edilmesi gereken en önemli kriter, regülatörün gerekli olan maksimum akıma dayanıklı
olmasıdır. Tasarlanan regülatörün, kullanılan akümülatör voltajı ile uyumlu olmasına da
dikkat edilmelidir.“ [4]
11
Şarj regülatörleri, DC voltaj çıkışlı olduğundan dolayı doğru akımla çalışan cihazlara
direkt gerilim verirler. Bu projede kullanılmak üzere 12V 3A’lik şarj regülatörü uygun
görülmüştür. Uygun görülen şarj regülatörüne ait teknik özellikler ise Çizelge 3’te
verilmiştir.
Çizelge 3. Akü şarj regülatörüne ait katalog bilgileri
Sistem Gerilimi
12V
Maksimum Solar/Yük Akımı
3A
Maksimum Solar Gerilimi
30V
Maksimum Batarya Gerilimi
25V
Boyutlar
90x49x18mm
Ağırlık
36gr
Çalışma Sıcaklığı
-40/+60℃
3.1.1.3. Akümülatör
“Akümülatörler üretilen elektrik enerjisini depolamaya yararlar. Genel olarak üç tiptir:
Kuru (FloodedLeadAcid), AGM (AbsorbedGlass Mat SealedLeadAcid) ve GEL
(GelledElectrolyteSealedLeadAcid). Ancak kuru tip akümülatörler fotovoltaik sistemlerde
daha çok tercih edilmektedir.“ [4] Tercih edilmesinin nedenleri ise şu şekilde sıralanabilir:
İçerisinde sıvı bulunmadığından gaz çıkışı olmaz ve insan sağlığını tehdit etmez.
Dolayısıyla güvenilirdir.
İçerisinde asit olmadığından yatay ve dikey pozisyonlarda kullanımı herhangi bir
tehlike arz etmemektedir.
Geniş ısı aralığına sahip olduğundan ortam değişmesinden etkilenmezler. Hemen
hemen her türlü ortamda çalışabilir.
İç dirençleri ihmal edilecek derecede küçük olduğundan bekleme esnasında
kayıplar minimum düzeydedir.
12
Tasarımı yapılan sistem için Çizelge 4’te teknik özelliklerini verilen 6V 1.3Ah’ lık kuru
tip akü kullanmak uygun görülmüştür.
Çizelge 4. 6V 1.3Ah Aküye ait katalog bilgileri
Markası
Ttec
Kimyası
Kurşun Asit Kuru Akü
Voltajı
6V
Kapasitesi
1.3Ah
En
24mm
Boy
97mm
Yükseklik
58mm
Ağırlık
280gr
3.2. Bariyer Sisteminin Tasarımı
Bu kısımda bariyeri oluşturan elemanlar ve bu elemanların özellikleri verilmiştir.
Bariyer; mekanik ve elektronik aksanı içinde bulunduran bariyer kasası, tehlike işaretlerini
taşıyan bariyer kolu ve sabit destek gibi donanımlardan meydana gelmiştir.
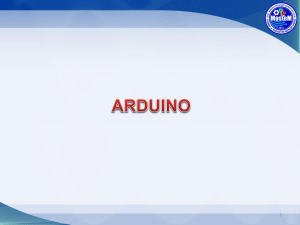
3.2.1. Mekanik Aksan
Mekanik aksan; bariyerin mekanik ve elektronik aksanını muhafaza eden bariyer kasası,
tehlike işaretlerini taşıyan bariyer kolu, bariyer kol ağırlığını taşıyan sabit destek ve sonsuz
dişliyi taşıyan redüktörlü motordan oluşur. ġekil 3’te bariyer kasasının iç kısmı verilerek
mekanik aksan gösterilmiştir.
13
Şekil 3. Bariyerin mekanik aksanı
Bariyer, 6 Volt DA akımla çalışan redüktörlümotora sahiptir. Ardışık ve sürekli
çalışmada DA motorların tüm avantajlarına sahiptir. “Örneğin; bariyer açılırken ve
kapanırken motor hızını düşürerek sıfıra getirir ve yumuşak bir frenleme yapılmış olur.“ [5]
Çizelge 5’te projede kullanılan yüksek torklu 6 Volt DA motora ait katalog bilgileri
verilmiştir.
Çizelge 5. 6 Volt DA motora ait katalog bilgileri
Boşta Çekilen Akım (6V)
20mA
Yüklü Çekilen Akım (6V)
0.5A
Yüklü Tork (6V)
4.8Kg-Cm
Hız (6V)
60Rpm
Şaft Çapı
20mm
Ağırlık
9gr
3.2.2. Elektronik Aksan
Tüm bağlantılar teorik altyapı kısmında ayrıntılı olarak anlatılan arduinouno r3
üzerinden sağlanır. Arduino Uno R3’e gerekli bağlantılar yapılarak L293D motor sürücü
modülü, mfrc522 rfid kart okuyucu bağlanmıştır. Arduino Uno R3 gerekli yazılımlar
yaparak motor ve kart ile okuma işlemi yapılmıştır.
14
3.2.2.1. RFID Teknolojisi Ġle Bariyer Kontrol Sisteminin Tasarımı
Bir alıcı ve verici mantığıyla radyo frekanslarını kullanarak tasarlanan sistemde
araçların sahibine bir elektronik kart veya anahtarlık verilir, bu elektronik kart veya
anahtarlık verici görevindedir. Aracın girmesini kontrol eden kollu bariyerde ise bir kart
okuyucu vardır ki bu da alıcı görevindedir.
Sistemin çalışma prensibi ise, bariyer kasasının içine yerleştirilen kart okuyucuya belirli
bir mesafeden kullanıcı üzerinde bulunan kart veya anahtarlık tutularak okutulur.
Okuyucunun belleğinde kayıtlı olarak bulunan kart numaraları ile karşılaştırılarak
doğrulanması gerçekleşir. Kayıtlarda kullanıcıya ait kart numaraları var ise çıkış katına
sinyal gönderilerek mekanik aksana enerji gönderilir ve sistem devreye sokulur böylece
bariyer açılmış olur.
Projenin tasarımı için gerekli olan malzeme listesi ve maliyet hesabı EK-4’te
verilmiştir. Projeye uygulanan Arduino yazılım kodları ise EK-5’te verilmiştir.
15
4. SĠMÜLASYON ÇALIġMASI
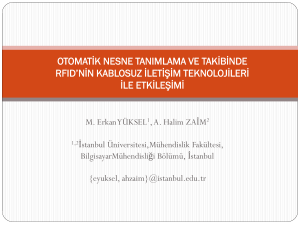
4.1. Motor Sürücü Devresinin Simülasyonu
Motor sürücü devresinin simülasyonunu gerçekleştirebilmek için kontrol edilecek
sistemin yerine (yön kontrolu) led bağlama yöntemi uygulanmıştır. Sistemin simülasyon
devresi ġekil 4’te verilmiştir.
Şekil 4.Motor sürücü simülasyon devresi
Burada oluşturulan devre ile sistemin çalışması ledler yardımıyla incelenmiştir. Devreye
baktığımızda her motor için kırmızı ve yeşil olmak üzere iki adet led yerleştirilmiştir. Yeşil
led motor ileri yönde hareket ettiğinde yanarken kırmızı led ise motor ters yönde hareket
ettiği zaman yanmaktadır.
16
5. DENEYSEL ÇALIġMALAR
5.1. Motor Sürücü Devresinin Gerçeklenmesi
İhtiyacımız olan motor sürücü devresi, bir önceki kısımda da görüldüğü üzere (şekil 4)
simülasyonlar yardımıyla elde edildikten sonra aynı devre yine yardımcı programlar
kullanılarak baskı devreleri haline getirildi. Bu devreler ġekil 5’te ve ġekil 6’da
verilmiştir.
Şekil 5. Motor sürücü baskı devresinin yerleşim dizaynı
Şekil 6. Motor sürücü baskı devresi
17
Elde edilen baskı devresinin çıktısı, yazıcı yardımıyla koyu ve kalın çizgilerle el işi
kağıdı üzerine alındı.
El işi kağıdı üzerindeki devreyi bakır plakete aktarmak için; el işi kağıdının tonerli
kısmını bakır plakete tam gelecek şekilde ayarlandı, bakır plaketin kaymamasına dikkat
edilerek, ütü yardımıyla tonerin bakır plakete yapışmasını sağlandı. Sonrasında ise bakır
plaket üzerindeki el işi kağıdı kenarlarından başlayarak çıkarıldı. Asetat kalemi ile
devrenin bakır plakete geçmeyen eksik kısımlarını tamamlandı. Daha sonra hazırlanan
asitli çözeltinin içine bakır plaketi atarak tonersiz kısmın erimesini sağlandı. Bundan sonra
ise tiner ve fırça ile plaketteki toneri çıkarıldı.
İnce uçlu matkap yardımı ile plaketteki işaretli noktalar, kenarlarına kaydırmamaya
çalışarak delindikten sonra, daha önceden belirlenmiş olan devre elemanları plaket üzerine
lehim yardımıyla yerleştirildi. Böylece motor sürücü devresi gerçeklenmiş oldu. Bu motor
sürücü devresi ġekil 7’de verilmiştir.
Şekil 7. Gerçeklenmiş olan motor sürücü devresi
18
5.2. Bağlantıların Yapılması
Tüm bağlantılar teorik altyapı kısmında ayrıntılı olarak anlatılan Arduino Uno R3
üzerinden sağlanır. Arduino Uno R3’e gerekli pin bağlantıları yapılarak motor sürücü
devresi, RC522 RFID kart okuyucu bağlanmıştır. Tüm bu bağlantılardan sonra devrelerin
son hali ġekil 8’de verilmiştir.
Şekil 8. Devrelerin bağlantı görüntüsü
19
6. SONUÇLAR
Bu projede; güneş enerjisi ile çalışan, RFID yardımıyla otomatik olarak açılıp kapanan
bariyer tasarlanmıştır. Yenilebilir enerji kaynaklarından olan güneş enerjisi kullanılarak
hızla tükenmekte olan birincil enerji kaynaklarına ve bu kaynakların enerji üretimi için
yakılmaları esnasında ortaya çıkan ekolojik bozulmalara da proje kapsamında bir çözüm
getirilmiştir. Yapılan bu projede aşağıda listelenen sonuçlara ulaşılmıştır.
Bariyer otomasyonu yapılırken yenilebilir enerji kaynaklarından olan güneş
enerjisinden yararlanmak için 20W güneş paneli ve 12V 3A şarj regülatörü,
bariyer otomasyonunu gerçekleştirmek için ise Arduino Uno R3, RC522 RFID
NFC modülü ve motor sürücü devresi kullanılmıştır.
Tasarlanan güneş enerjisi sisteminde üretilen enerjiyi akümülatörde depolamak
amacıyla 6V 1,3Ah’lık akümülatör kullanılmıştır. Panel yardımıyla üretilen
enerji akümülatörde depolanarak sistemin enerji kaynağı olarak kullanılmıştır.
Bariyerin mekanik aksanı; bariyerin mekanik ve elektronik aksanını muhafaza
eden bariyer kasası, tehlike işaretlerini taşıyan bariyer kolu ve kol ağırlığını
taşıyan
sabit
destek
ve
sonsuz
dişliyi
taşıyan
redüktörlü
motordan
oluşturulmuştur.
Bariyerin elektronik aksanı için gerekli olan bütün bağlantılar Arduino Uno R3
üzerinden yapılmıştır. Arduino Uno R3’e gerekli yazılımlar yapılarak RC522
RFID NFC kiti yardımıyla kart okuma işlemleri yapılmıştır.
20
7. YORUMLAR VE DEĞERLENDĠRME
Güneş enerjili bariyer otomatı projesi, insanların yaşamlarında kolaylık sağlayan,
zaman kaybı olarak görülen bir işi otomatik olarak gerçekleştiren, güneş enerjisi kullanarak
hızla tükenmekte olan birincil enerji kaynaklarına ve bu kaynakların enerji üretimi için
yakılmaları esnasında ortaya çıkan ekolojik bozulmalara da proje kapsamında bir çözüm
getiren sistemler bütünüdür.
Uygulamalı olarak hazırlanan bu proje ile ilk olarak bir güneş enerjisi sisteminin
tasarımı hakkında bilgi edilnilmiş ve daha sonra Arduino hakkında elde edilen bilgilerle bir
kontrol
sisteminin
nasıl
oluşturulacağı
ve
kontrolün
RFID
yardımıyla
nasıl
gerçekleştirileceği hakkında fikirler geliştirilmiştir. Geliştirilen fikirler sonucunda gerekli
tasarımlar yapılarak hazırlanmış olan basit bir prototip ile sistemin çalışması örnek olarak
gösterilmiştir. Öte yandan böyle bir sistemin çalışması gerçeğe uyarlanması sırasında her
ne kadar üzerinde daha kapsamlı düşünülmesi gerekmekte ise de genel olarak çalışma
mantığı böyle olacaktır.
Üzerinde çalıştığımız proje, yenilebilir enerji türlerinden güneş enerjisi ile
beslenmektedir. Yenilenebilir sistemler ile enerji üretimi dünya üzerinde en çok araştırma
yapılan konulardan bir tanesi olduğu için proje gelişmeye açıktır. Bunun yanı sıra bariyeri
kontrol etmek için kullanılan RFID teknolojisi ile ilgili olarak veri
iletişim/saklama
standartları ve yarı iletken teknolojisi gelişmelere açık bir konudur. Ayrıca RFID’ in
kablosuz heterojen sistemlere kusursuz entegre edilmesi kablosuz endüstri dünyasında bir
yeniliğe yol açabilir.
Böyle bir proje üzerine çalışmanın kazanımlarına gelecek olursak, ilk olarak
gerçeklenebilecek olan yararlı bir sistem tasarlamış olduk. Ayrıca böyle bir sistemin
mantığını oluşturken programlama bilgimizi artırmış ve el yeteneğimizi geliştirmiş olduk.
21
KAYNAKLAR
[1]
K. Finkenzeller, RFID Handbook, Carl Hanser Verlag, Münih, 2003.
[2]
A. Altunsaçlı, Elektrik Motorları ve Sürücüleri, Color Ofset, Kahramanmaraş, 2003
[3]
G. Tugay, Elektronik Hobi, Alfa, 2004.
[4]
T. Köroğlu, A. Teke, K. Ç. Bayındır ve M. Tümay, Güneş Paneli Sistemlerinin
Tasarımı, Elektrik Mühendisliği, 439. Sayı, Temmuz 2010.
[5]
Geçiş Kontrol Sistemlerinin Bağlantıları, Elektrik Elektronik Teknolojisi, Ankara, 2007.
22
EKLER
EK-1
EK-1.1. IEEE Etik Kuralları
IEEE
üyeleri
olarak
bizler
hayatstandartlarınıetkilemesindeki
bütün
önemin
dünya
üzerinde
farkındayız.
teknolojilerimizin
Mesleğimize
karşı
şahsisorumluluğumuzu kabul ederek, hizmet ettiğimiz toplumlara ve üyelerine enyüksek etik
ve mesleki davranışta bulunmayı söz verdiğimizi ve aşağıdaki etikkuralları kabul ettiğimizi
ifade ederiz.
1. Kamu güvenliği, sağlığı ve refahı ile uyumlu kararlar vermenin sorumluluğunu kabul
etmek ve kamu veya çevreyi tehdit edebilecek faktörleri derhal açıklamak;
2. Mümkün olabilecek çıkar çatışması, ister gerçekten var olması isterse sadecealgı
olması, durumlarından kaçınmak. Çıkar çatışması olması durumunda, etkilenen
taraflara durumu bildirmek;
3. Mevcut verilere dayalı tahminlerde ve fikir beyan etmelerde gerçekçi ve dürüst olmak;
4. Her türlü rüşveti reddetmek;
5. Mütenasip uygulamalarını ve muhtemel sonuçlarını gözeterek teknoloji anlayışını
geliştirmek;
6. Teknik yeterliliklerimizi sürdürmek ve geliştirmek, yeterli eğitim veya tecrübe olması
veya işin zorluk sınırları ifade edilmesi durumunda ancak başkaları için teknolojik
sorumlulukları üstlenmek;
7. Teknik bir çalışma hakkında yansız bir eleştiri için uğraşmak, eleştiriyi kabuletmek ve
eleştiriyi yapmak; hatları kabul etmek ve düzeltmek; diğer katkısunanların emeklerini
ifade etmek;
8. Bütün kişilere adilane davranmak; ırk, din, cinsiyet, yaş, milliyet, cinsi tercih, cinsiyet
kimliği, veya cinsiyet ifadesi üzerinden ayırımcılık yapma durumuna girişmemek;
9. Yanlış veya kötü amaçlı eylemler sonucu kimsenin yaralanması, mülklerinin zarar
görmesi, itibarlarının veya istihdamlarının zedelenmesi durumlarının oluşmasından
kaçınmak;
10. Meslektaşlara ve yardımcı personele mesleki gelişimlerinde yardımcı olmak ve onları
desteklemek.
23
EK-1.2. IEEE Code Of Ethics
We, the members of the IEEE, in recognition of the importance of our technologies in
affecting the quality of life throughout the world, and in accepting a personal obligation to
our profession, its members and the communities we serve, do hereby commit ourselves to
the highest ethical and professional conduct and agree:
1. to accept responsibility in making engineering decisions consistent with the safety,
health and welfare of the public, and to disclose promptly factors that might
endanger the public or the environment;
2. to avoid real or perceived conflicts of interest whenever possible, and to disclose
them to affected parties when they do exist;
3. to be honest and realistic in stating claims or estimates based on available data;
4. to reject bribery in all its forms;
5. to improve the understanding of technology, its appropriate application, and
potential consequences;
6. to maintain and improve our technical competence and to undertake technological
tasks for others only if qualified by training or experience, or after full disclosure of
pertinent limitations;
7. to seek, accept, and offer honest criticism of technical work, to acknowledge and
correct errors, and to credit properly the contributions of others;
8. to treat fairly all persons regardless of such factors as race, religion, gender,
disability, age, or national origin;
9. to avoid injuring others, their property, reputation, or employment by false or
mlicious action;
10. to assist colleagues and co‐workers in their professional development and to
support them in following this code of ethics.
Approved by the IEEE Board of Directors
August 199
24
EK-2.
DĠSĠPLĠNLER ARASI ÇALIġMA
Güneş enerjili bariyer otomatı projesini hazırlarken bariyerin mekanik aksanı
dediğimiz; pleksiglass malzemeden lazer kesim ile bariyer kasası ve bariyer kolunun
yapımında, dişli sistemi ve redüktörlü motorun montajında ayrıca Arduino UNO R3’ün
yazılımı yapılarak programlanmasında İzmir’de bulunan robot projeleri ekibinden teknik
destek alınmıştır.
25
EK-3.
ÇALIġMA TAKVĠMĠ
Ekim Kasım
Ön araştırmaların
yapılması
Tasarım aşamalarının
belirlenmesi
Envanter taramasının
yapılması
x
Aralık Ocak Şubat Mart Nisan Mayıs Haziran
x
x
x
Tasarım projesinin
x
yazımı, teslimi ve
sunumu
Malzeme fiyat
x
araştırması
Malzeme siparişinin
x
verilmesi
Malzeme teslim
x
alınması
Akünün boşaltılarak
x
değişken şartlarda
şarja bırakılması
Baskı devrelerinin
x
gerçeklenmesi
Bariyer kasa
x
donanımlarının monte
edilmesi
Arduino yazılımının
x
yapılması
RFID teknolojisinin
x
bariyere uygulanması
26
Güneş enerjisi
x
sisteminin bariyere
entegre edilmesi
Ölçümler ve testler
x
Tezin hazırlanması ve
x
teslim edilmesi
27
x
EK-4.
MALĠYET HESABI
Malzeme Adı
Adet Birim Fiyatı (TL)
Toplam Fiyat (TL)
20W Güneş Paneli
1
64,43
64,43
Akü Şarj Regülatörü
1
1
30
6V 1,3Ah Akü
1
9,52
9,52
Pleksiglass Bariyer Kasası
1
50
50
Redüktörlü DA Motor
1
22,48
22,48
Arduino Uno R3
1
63,76
63,76
RC522 RFID NFC Kit
1
23,32
23,32
40 Pin Ayrılabilen Kablo
1
11,66
11,66
40 Pin Konnektör Dişi
1
0,25
0,25
10x10 Bakır Plaket
1
0,85
0,85
L293D
1
5,10
5,10
Kırmızı LED
2
1,02
2,04
Yeşil LED
2
1,02
2.04
10nF Kondansatör Paketi
1
0,64
0.64
100nF Kondansatör Paketi
1
0,54
0,54
100µF 35V Kondansatör
1
0,07
0,07
100 Ohm Direnç Paketi
1
0,25
0,25
470 Ohm Direnç Paketi
1
0,25
0,25
TOPLAM
287.2
28
29
30
EK-6.
KaradenizTeknikÜniversitesi
STANDARTLAR VE KISITLAR
MühendislikFakültesi
FORMU
Elektrik-ElektronikMühendisliğiBölümü
Tasarım Projesinin hazırlanmasında Standart ve Kısıtlarla ilgili olarak, aşağıdaki soruları
cevaplayınız.
1. Projenizin tasarım boyutu nedir? Açıklayınız.
Gerçekleştirilmesi mümkün ve hayatın birçok alanında uygulanabilir bir projedir.
2. Projenizde bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Projemizde mekanik güç hesabı ve güneş panelinden alınan enerjiyi taşımak için gerekli
olan kablo kesiti hesabı yapılmıştır.
3. Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız?
Projemizde, sürücü sitemleri ve elektrik makinaları derslerinde öğrendiğimiz DA motor
güç hesabı ve güç dağıtım sistemleri ile yüksek gerilim sistemleri tasarımı derslerinde
görmüş olduğumuz iletken kablo kesit hesabından yararlanılmıştır.
4. Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
Bu projede güneş enerjisi ile beslenen RFID teknolojisi ile otomatik olarak kontrol
edilebilen kollu bariyere sahip bir geçiş sistemi tasarımı yapılmıştır. Günümüzde böyle
bir projede uygulanan standartlar araştırılmış ve bu standartlar üç başlık altında kısım
kısım açıklanmıştır.
Güneş Enerjisi Standarları
Ülkemizde güneş enerjisinden elektrik üretimi için kristal veya ince film PV modülleri
ile odaklamalı PV modüllerinin; performans testleri ve tip kabulleri için TS EN 61215,
TS EN 61646 ve TS EN 62108 standartları, emniyet testleri için TS EN 61730 standardı
uygulanır.
31
RFID Teknolijisi Standartları
Günümüzde böyle bir sistemin tasarımında Ultra Yüksek Frekans (UHF) kullanılır.
UHF spektrumunda RFID standartları için EPCGlobal ve ISO çalışmalarını yoğun bir
şekilde sürdürmektedir. EPCGlobal, EPC Sınıf 1 Gen2 standardını 2004 yılı sonunda
piyasaya sürmüştür. ISO ise 18000–6 standardını Ağustos 2004’de duyurmuştur.
Ülkelerin UHF radyo spektrumu konusunda uyum içinde olmaması, standartların
gelişmesinde zorluklar oluşturmaktadır. Amerika ve Kanada, UHF RFID sistemlerini
902–928 MHz band aralığında kullanırken, Avrupa Telekomünikasyon Standartları
Enstitüsü (ETSI) 865,6 ve 867,6 MHz band aralığını UHF RFID kullanımı için tahsis
etmiştir.
Bariyer Standartları
Kollu bariyerler standart olarak 4m ve 6m kol uzunluğuna göre üretilir. Daha sonra
müşterilerin isteği doğrultusunda bariyer kolları kesilerek kısaltılabilinir. Bariyerlerin
kol uzunluğu belirlendikten sonra buradan yola çıkarak iç mekanizmanın tasaramı
yapılır. İç mekanizma tasarımında kullanılan malzemeler, bariyer kontrol ünitesinin
gerektiğinde diğer uygulamalara entegre olabilirliği, bariyer kolunun açılma ve
kapanma süresi, çalışma sıcaklığı ve her türlü hava şartlarında göstermiş olduğu
süreklilik gibi faktörler bariyerin kalitesini belirler.
5. Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir?
a) Ekonomi :
Projede kullanmak istediğimiz güneş paneli ve RFID sistremlerinin fiyatları
oldukça yüksektir.
b) Çevre sorunları:
Projemiz yenilenebilir enerji kaynaklardından güneş enerjisi ile beslenmektedir.
Bu sebepten dolayı çevreye herhangi bir zararı yoktur.
32
c) Sürdürülebilirlik:
Günlük hayat şartlarında ve gelişen teknolojiyle birlikte, projeye duyulan ilgi
artacaktır. Projenin fonksiyonlarının geliştirilebilmesiyle birlikte kullanımı
giderek yaygınlaşacaktır.
d) Üretilebilirlik:
Projeyi oluşturan temel özellik fonksiyonları kontrol eden programlama ve RFID
teknolojisidir.
Programlaması yapılıp RFID sistemi kurulduktan sonra
üretilebilmesi basit ve uygulanabilirdir.
e) Etik:
Etik açıdan projenin önünde herhangi bir engel bulunmamaktadır.
f) Sağlık:
Proje bir devre üzerinden kontrol edildiğinden, sağlık açısından bir sakıncası
yoktur.
g) Güvenlik:
Projede kullanılan motor düşük gerilim seviyesinde olduğundan dolayı, güvenlik
açısından bir sakıncası yoktur.
h) Sosyal ve politik sorunlar:
Bu projeyi kullanmak isteyen kesimler daha çok ekonomik açıdan rahat bir
düzeyde olduğu kabul edilirse, her kesimden insanın kullanmak isteyeceği bir
proje değildir.
33
ÖZGEÇMĠġLER
VOLKAN DENĠZ
16 Eylül 1990 tarihinde Balıkesir ilinin Ortamandıra kasabasında doğmuştur. İlk
öğrenimini ve orta öğrenimini Körfez Anadolu İlköğretim Okulu’nda okumuştur. Liseyi 24
Kasım Anadolu Lisesinde okumuştur. 2009 yılında liseden mezun olmuş ve ertesi yıl
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği
bölümünü kazanmıştır. Son sınıf öğrencisi olup halen üniversite eğitimini sürdürmektedir.
DENĠZ GEZENER
6 Haziran 1992 tarihinde Muş ilinin Malazgirt ilçesinde doğmuştur. İlköğrenimini ve
orta öğrenimini Malazgirt Pakize Özgen ilköğretim okulunda okumuştur. Liseyi Muş
Merkez Anadolu Lisesinde okumuştur. 2009 yılında liseyi burada tamamlamış ve 2009
yılında Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik
Mühendisliği bölümünü kazanmıştır. Son sınıf öğrencisi olup halen üniversite eğitimini
sürdürmektedir.
34