GENELLEŞTİRİLMİŞ
STEREOGRAFİK İZDÜŞÜM VE İNVERSİYON
Mahmut MAK
YÜKSEK LİSANS TEZİ
MATEMATİK
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
MAYIS 2008
ANKARA
Mahmut MAK tarafından hazırlanan GENELLEŞTİRİLMİŞ STEREOGRAFİK
İZDÜŞÜM VE İNVERSİYON adlı bu tezin Yüksek Lisans tezi olarak uygun
olduğunu onaylarım.
Prof. Dr. Baki KARLIĞA
……………………………….
Tez Danışmanı, Matematik Anabilim Dalı
Bu çalışma, jürimiz tarafından oy birliği ile Matematik Anabilim Dalında Yüksek
Lisans tezi olarak kabul edilmiştir.
Prof. Dr. H. Hilmi HACISALİHOĞLU
……………………………….
Matematik Anabilim Dalı, Ankara Üniversitesi
Prof. Dr. Baki KARLIĞA
……………………………….
Matematik Anabilim Dalı, Gazi Üniversitesi
Prof. Dr. Erdoğan ESİN
……………………………….
Matematik Anabilim Dalı, Gazi Üniversitesi
Tarih: 14/05/2008
Bu tez ile G.Ü. Fen Bilimleri Enstitüsü Yönetim Kurulu Yüksek Lisans derecesini
onamıştır.
Prof. Dr. Nermin ERTAN
Fen Bilimleri Enstitüsü Müdürü
……………………………….
TEZ BİLDİRİMİ
Tez içindeki bütün bilgilerin etik davranış ve akademik kurallar çerçevesinde elde
edilerek sunulduğunu, ayrıca tez yazım kurallarına uygun olarak hazırlanan bu
çalışmada orijinal olmayan her türlü kaynağa eksiksiz atıf yapıldığını bildiririm.
Mahmut MAK
iv
GENELLEŞTİRİLMİŞ
STEREOGRAFİK İZDÜŞÜM VE İNVERSİYON
(Yüksek Lisans Tezi)
Mahmut MAK
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
Mayıs 2008
ÖZET
Bu tez altı bölümden oluşmaktadır. Birinci bölümde temel kavramlar verilip
ikinci ve üçüncü bölümlerde de, sırasıyla, ν -indeksli n-boyutlu pseudoküreler
için stereografik izdüşüm ve inversiyon tanıtıldı. Tezin orijinal kısmı olan
dördüncü ve beşinci bölümlerde ise, sırasıyla, (ν − 1) -indeksli n-boyutlu
pseudohiperbolik uzayın stereografik izdüşümü ve inversiyonu elde edildi. Son
olarak altıncı bölümde de 3-boyutlu hiperbolik uzaydaki bazı özel yüzeylerin
stereografik izdüşümü altındaki, görüntüleri 3-boyutlu Öklidiyen uzayda
grafiklendirildi.
Bilim Kodu
: 204.1.049
Anahtar Kelimeler : Stereografik izdüşüm, inversiyon, pseudoküre,
pseudohiperbolik uzay, horocycle
Sayfa Adedi
: 58
Tez Yöneticisi
: Prof. Dr. Baki Karlığa
v
THE GENERALIZED
STEREOGRAPHIC PROJECTION AND INVERSION
(M.Sc. Thesis)
Mahmut MAK
GAZI UNIVERSITY
INSTITUTE OF SCIENCE AND TECHNOLOGY
May 2008
ABSTRACT
This thesis is divided into six sections. In the first section, basic notions are
given. In the second and third sections, the stereographic projection and
inversion are devoted for n-dimensional pseudosphere with index ν ,
respectively.
Stereographic
projection
and
inversion
of
n-dimensional
pseudohyperbolic space with index (ν - 1) are obtained in the fourth and fifth
sections which are original parts of the thesis. Finally, in the 3-dimensional
hyperbolic space, the images under stereographic projection of some special
surfaces are visualized in three dimensional Euclidean space.
Science Code : 204.1.049
Key Words : Stereographic projection, inversion, pseudospherical space,
pseudohyperbolic space, horocycle
Page Number : 58
Adviser
: Prof. Dr. Baki Karlığa
vi
TEŞEKKÜR
Bu tezin oluşma aşamasında değerli vaktini harcamaktan çekinmeyen kıymetli
hocam Prof. Dr. Baki KARLIĞA’ya bilimsel araştırmanın yöntem ve tekniklerinde
tecrübelerinden faydalanma fırsatı verip eksiklerimi gidermede elinden gelen her
yardımı yaptığı için teşekkürü bir borç bilirim.
Ayrıca bu zor süreçte maddi manevi desteklerinden dolayı biricik ailemin fertlerine
de çok teşekkür ederim.
vii
İÇİNDEKİLER
Sayfa
ÖZET .......................................................................................................................... iv
ABSTRACT................................................................................................................. v
TEŞEKKÜR................................................................................................................vi
İÇİNDEKİLER .......................................................................................................... vii
ŞEKİLLERİN LİSTESİ ............................................................................................ viii
RESİMLERİN LİSTESİ ............................................................................................. ix
SİMGELER VE KISALTMALAR.............................................................................. x
1. GİRİŞ ....................................................................................................................... 1
2. PSEUDOKÜRELER İÇİN GENELLEŞTİRİLMİŞ STEREOGRAFİK
İZDÜŞÜM ............................................................................................................... 9
3. PSEUDOKÜRELER İÇİN GENELLEŞTİRİLMİŞ İNVERSİYON .................... 20
4. PSEUDOHİPERBOLİK UZAY İÇİN GENELLEŞTİRİLMİŞ
STEREOGRAFİK İZDÜŞÜM............................................................................... 26
5. PSEUDOHİPERBOLİK UZAY İÇİN GENELLEŞTİRİLMİŞ
İNVERSİYON ....................................................................................................... 37
6. STEREOGRAFİK İZDÜŞÜMÜN BAZI UYGULAMALARI............................. 43
KAYNAKLAR .......................................................................................................... 52
EKLER....................................................................................................................... 53
EK-1 Matematica Programı ile İzdüşüm Örnekleri ................................................... 54
ÖZGEÇMİŞ ............................................................................................................... 58
viii
ŞEKİLLERİN LİSTESİ
Şekil
Sayfa
Şekil 1.1. Dünyanın kuzey yarımküresinin güney kutup noktasından kuzey
kutup noktasındaki teğet düzlem üzerine stereografik izdüşüm .................. 1
Şekil 2.1. r-yarıçaplı pseudoküre ( S12 (r ) ) ................................................................... 9
Şekil 4.1. r-yarıçaplı pseudohiperbolik ( H 02 (r ) ) ....................................................... 26
Şekil 6.1. Horocycle‘ın stereografik izdüşümü altındaki görüntüleri ........................ 46
Şekil 6.2. Horodairesel yüzeyin stereografik izdüşümü altındaki görüntüleri........... 47
Şekil 6.3. Asli normal horodairesel yüzeyin stereografik izdüşümü altındaki
görüntüleri ................................................................................................. 50
Şekil 6.4. Binormal horodairesel yüzeyin stereografik izdüşümü altındaki
görüntüleri ................................................................................................. 51
ix
RESİMLERİN LİSTESİ
Resim
Sayfa
Resim 1.1. Astrolabe.................................................................................................... 1
x
SİMGELER VE KISALTMALAR
Bu çalışmada kullanılmış bazı simgeler açıklamaları ile birlikte aşağıda sunulmuştur.
Simgeler
Açıklama
Rνn
n-boyutlu ν -indeksli yarı-Öklidiyen uzay
.
Standart iç çarpım
⟨,⟩
Skalar çarpım
×
Vektörel Çarpım
∧
Lorentz Vektörel Çarpım
Sνn (r)
n-boyutlu ν -indeksli Pseudoküre
H νn-1 (r)
n-boyutlu ν -indeksli Pseudohiperbolik uzay
Λ
Rνn ’nin null konisi
σ
Sνn (r ) için stereografik izdüşüm
τ
Hνn-1 (r ) için stereografik izdüşüm
τH
Hiperbolik n-uzayın stereografik izdüşümü
Φ
yarı-Öklidiyen yansıma
Ψ
Sνn−1 (r ) ’nin inversiyonu
Ψ
Hνn-2−1 (r ) ’nin inversiyonu
κh
Hiperbolik eğrilik
τh
Hiperbolik burulma
GL(n, R)
Genel lineer grup
gl(n, R)
GL(n, R) ’nin Lie cebiri
O ν (n)
yarı-Ortogonal grup
oν (n)
Oν (n) ’nin Lie cebiri
SO ν (n)
özel yarı-Ortogonal grup
soν (n)
SOν (n) ’nin Lie cebiri
1
1. GİRİŞ
Stereografik izdüşüm ilk olarak Yunan matematikçi Hipparchus tarafından ifade
edilmiştir. Astronom ve Coğrafyacı olan Yunan asıllı Claudius Ptolemy de bu
izdüşümden yola çıkarak, gökcisimlerin koordinatlarını hesaplamak için kullanılan
Astrolabe (Resim 1.1) aletini yapılandırmıştır. Dolayısıyla ilk isimlendirmesi
Astrolabe olan izdüşüm, 1613 yılında François d’Aguillon tarafından Stereografik
İzdüşüm olarak isimlendirilmiştir.
Resim 1.1. Astrolabe
Stereografik izdüşüm, matematiksel ifadesinin yanı sıra uygulama alanları olarak
haritacılık bilimi olan kartografi (Şekil 1.1), kristallerin yapısını inceleyen bilim dalı
kristalografi ve jeoloji gibi farklı alanlarda kullanılan bir metoddur. Son yıllarda
[1]’de başlayıp [2]’de devam eden ve [3]’ün teşekkür kısmından da anlaşılacağı gibi
beş boyutlu Kaluza–Klein teorisinin kurulmasına temel teşkil eden [4]’deki
stereografik izdüşümün önemi gün geçtikçe artmaktadır. Bu tezde elde ettiğimiz
bulguların da fiziksel kavramlara uyarlanabileceği inancındayız.
Şekil 1.1. Dünyanın kuzey yarımküresinin güney kutup noktasından kuzey kutup
noktasındaki teğet düzlem üzerine stereografik izdüşümü
2
1.1. Tanım
V bir reel vektör uzayı olsun. , :VxV → R dönüşümü bilineer ve simetrik ise , ’ye
V üzerinde bilineer form denir [5].
1.2. Tanım
V bir reel vektör uzayı ve
, :VxV → R simetrik bilineer form ve v ∈ V
olsun. ∀u ∈ V için u , v = 0 olması v = 0 olmasını gerektiriyorsa , dönüşümüne
non-dejenere form denir [5].
1.3. Tanım
V vektör uzayı üzerinde , : VxV → R simetrik bilineer form ve W, V nin bir
altvektör uzayı olsun. Bu durumda
,
W
: WxW → R
kısıtlaması negatif tanımlı olacak şekildeki en büyük boyutlu W altvektör uzayının
boyutuna , ’nin indeksi denir [5].
1.1. Teorem
, : VxV → R simetrik bilineer formuna karşılık gelen matris M olsun. Bu durumda
M regülerdir ⇔ , , non-dejeneredir [5].
3
1.4. Tanım
V reel vektör uzayı üzerinde tanımlı simetrik, bilineer, non-dejenere forma, V reel
vektör uzayı üzerinde bir skalar çarpım denir [5].
1.1. Örnek
0 ≤ ν ≤ n ,ν ∈ N için
v
n
i =1
i = v +1
, : Rν xRν → R , x, y = −∑ xi yi + ∑ xi yi
n
n
şeklindeki dönüşüm simetrik, bilineer ve non-dejenere formdur. Bu dönüşüm
n-boyutlu ve ν -indeksli Rνn reel vektör uzayı üzerinde bir skalar çarpımdır.
1.5. Tanım
(R
n
ν
, ,
) ikilisine
, skalar çarpımı ile birlikte yarı-Öklidiyen uzay denir [5].
1.6. Tanım
x , Rνn ’de bir vektör olsun. Bu durumda
i.
x, x > 0 ve x = 0, ise x spacelike vektör,
ii. x, x = 0 ve x ≠ 0, ise x null (ligtlike) vektör,
iii. x, x < 0 ve x ≠ 0, ise x timelike vektör
diye adlandırılır [5].
4
1.7. Tanım
Λ = { x ∈ Rνn | x, x = 0, x ≠ 0} cümlesine Rνn yarı-Öklidiyen uzayında orijindeki
null-koni denir [5].
1.8. Tanım
y ∈ Rνn − {0} ve H = Sp{ y}⊥ olmak üzere N, H hiperdüzleminin birim normali ise
Φ : Rνn → Rνn , Φ ( x) = x − 2 x, N N
şeklindeki dönüşüme H hiperdüzlemine göre yarı-Ökidiyen yansıma denir [6].
1.1. Lemma
ε = [δ ijε j ] , 0 ≤ ν ≤ n için bileşenleri ε1 = ... = εν = −1 ve εν +1 = ... = ε n = +1 olan
işaret matrisi olmak üzere GL(n, R ) = { A | det A ≠ 0} genel lineer grubunun alt grubu
O(ν , n −ν ) = { A ∈ GL(n, R) | AT = ε A−1ε
}
cümlesine yarı-Ortogonal grup denir [5].
1.2. Lemma
gl (n, R) nin bir alt cebiri olan
o(ν , n −ν ) = oν (n) = {S ∈ gl(n, R ) | S T = −ε S ε }
5
cümlesine
Oν (n) = O(ν , n −ν ) ’nin
Lie
cebiri
denir
ve
burada
S
matrisi
a ∈ o(ν ), b ∈ o(n −ν ) ve x , ν × (n −ν ) tipinde keyfi bir matris olmak üzere
⎡a
⎢ xt
⎣
x⎤
b ⎥⎦
formundadır [5].
1.9. Tanım
n ≥ 3 ve 1 ≤ i ≤ n − 1 için ui = (u1i ,..., uni ) ∈ R n olsun. ui vektörlerini sırasıyla satır
kabul eden ( n − 1) × n tipindeki
⎡u11
⎢ 2
⎢u1
⎢.
A(u1 ,..., un −1 ) = ⎢
⎢.
⎢.
⎢ n −1
⎢⎣u1
u12
.
.
.
u22
.
.
.
.
.
.
.
.
u2n −1 .
.
.
.
u1n ⎤
⎥
un2 ⎥
. ⎥
⎥
. ⎥
. ⎥
⎥
unn −1 ⎥⎦
matrisinden j. sütunun silinmesiyle oluşan ( n − 1) × (n − 1) tipindeki matris B j olsun.
Bu durumda u1 ,..., un −1 vektörün genelleştirilmiş vektörel çarpımı
u1 × ... × un −1 = ( (−1)1+1 det B1 , (−1)1+ 2 det B2 ,..., ( −1)1+ ( n −1) det Bn )
dir [7].
6
1.2. Teorem
u1 ,..., un −1 , w ∈ R n
de
herhangi
vektörler
ve
v = u1 × ... × un −1
olsun.
Eğer
D = A( w, u1 ,..., un −1 ) ise Det ( w, u1 ,..., un −1 ) = w ⋅ v dır [7].
1.1. Sonuç
u1 ,..., un −1 ∈ R n ve {e1 ,..., en } , R n ’nin standard bazı olsun. Bu durumda
( u1 × ... × un−1 ) = Det ( (e1 ,..., en ), u1 × ... × un−1 )
1.3. Teorem
Eğer u1 ,..., un −1 ∈ R n ise u1 × ... × un −1 vektörü 1 ≤ i ≤ n − 1 için her bir ui vektörüne
ortogonaldır. Yani
ui ⋅ (u1 × ... × un −1 ) = 0
dır [7].
1.4. Teorem
x, y, z, w ∈ R 4 de herhangi vektörler olsun. Bu durumda
(1) x × y × z = y × z × x = z × x × y ,
(2) x × y × z = − x × z × y = − y × x × z = − z × y × x ,
(3) w ⋅ ( x × y × z ) = Det ( w, x, y , z )
dir [7].
7
Şimdi [8]’de verilen Lorentziyen vektörel çarpımını ve özelliklerini R14 için verelim.
1.10. Tanım
x, y, z ∈ R14 de herhangi vektörler ve 1 ≤ i, j ≤ 4 için işaret matrisi ε = [δ ij ε j ] olsun.
Bu durumda
x ∧ y ∧ z = ε ( x × y × z)
ifadesine x, y , z vektörlerinin Lorentziyen vektörel çarpımı denir.
1.5. Teorem
x, y, z , w ∈ R14 de herhangi vektörler olsun. O zaman
(1) x ∧ y ∧ z = ε z × ε y × ε x ,
(2) x ∧ y ∧ z = y ∧ z ∧ x = z ∧ x ∧ y ,
(3) x ∧ y ∧ z = − x ∧ z ∧ y = − y ∧ x ∧ z = − z ∧ y ∧ x ,
(4) w, x ∧ y ∧ z = Det ( w, x, y, z ) .
1.2. Sonuç
x, y, z ∈ R14 de herhangi vektörler ve {e1 , e2 , e3 , e4 } , R14 ’ün standard bazı olsun. Bu
durumda
−e1 e2
x x2
x ∧ y ∧ z = ( −e1 , e2 , e3 , e4 ) , x ∧ y ∧ z = 1
y1 y2
z1 z2
e3
x3
y3
z3
e4
x4
y4
z4
8
dir.
1.6. Teorem
Eğer x1 , x2 , x3 ∈ R14 ise x1 ∧ x2 ∧ x3 vektörü 1 ≤ i ≤ 3 için xi vektörlerine Lorentz
ortogonaldır. Yani
xi , x1 ∧ x2 ∧ x3 = 0
dır.
1.11. Tanım
C r sınıfından diferensiyellenebilir manifoldlar M ve N olsun. Bu durumda M’den
N’ye r. mertebeden kısmi türevleri mevcut ve sürekli olan dönüşümlerin uzayı
C r ( M , N ) ile birlikte verilen topolojik yapıya C r -Whitney (güçlü) topoloji denir.
Eğer M ve N manifoldları C ∞ sınıfından iseler C ∞ ( M , N ) uzayı ile birlikte verilen
topolojik yapıya da C ∞ -Whitney topolojisi denir [9].
9
2. PSEUDOKÜRELER İÇİN GENELLEŞTİRİLMİŞ STEREOGRAFİK
İZDÜŞÜM
Sνn (r ) = { x ∈ Rνn +1 | x, x = r 2 }
pseudoküre ve
cümlesine ν -indeksli ve r-yarıçaplı n-boyutlu
Hνn (r ) = { x ∈ Rνn++11 | x, x = −r 2 }
cümlesine de ν -indeksli ve
r-yarıçaplı n-boyutlu pseudohiperbolik uzay denir.
Burada özel olarak ν = 1 için S1n (r ) pseudoküresel uzayına de-Sitter n-uzayı denir.
Şimdi aşağıda şekli verilen S12 (r ) pseudoküresinden yararlanarak bir dönüşüm
tanımlayalım.
Şekil 2.1. r-yarıçaplı pseudoküre ( S12 (r ) )
p = (0,..., 0, r ) ∈ Sνn (r ) noktası için
Λ = { x ∈ Sνn (r ) | xn +1 = r} , x ∈ Sνn (r ) \ Λ ve
x = σ ( x) ∈ { x ∈ Rνn +1 | xn +1 = 0} olarak alalım. O halde
10
ox = op + px , px = λ px
eşitliğinde xn +1 ≠ r için λ =
xi =
r
bulunur. Böylece
r − xn +1
rxi
, 1≤ i ≤ n
r − xn +1
(2.1)
elde edilir.
x, x =
r2
z, z , ( x1 ,..., xn ) = z ∈ Rνn
(r − xn +1 ) 2
ve x ∈ Sνn (r ) için ⟨ x, x⟩ = r 2 ise
z , z = r 2 − xn +12
olmasından
xn +1 =
r x, x − r3
r2 + x, x
(2.2)
bulunur. x , x ≠ −r 2 için Eş. 2.1 ve Eş. 2.2’den
xi =
2r 2
xi , 1 ≤ i ≤ n
r2 + x, x
elde edilir. O halde Hνn−−11 (r ) = { x ∈ Rνn | x, x = −r 2 } olmak üzere
(2.3)
11
σ : Sνn (r ) \ Λ → Rνn \ Hνn−−11 (r ), σ ( x) =
r
( x1 ,..., xn )
r − xn +1
dönüşümü elde edilir. Dönüşümün tersi de Eş. 2.2 ve Eş. 2.3’den
σ −1 : Rνn \ Hνn−−11 (r ) → Sνn (r ) \ Λ , σ −1 ( x ) =
r
r + x, x
2
( 2rx ,..., 2rx ,
1
n
x, x − r2 )
şeklinde bulunur [4].
2.1. Teorem
σ , birebir ve örten dönüşümdür [4].
İspat
x, y ∈ Sνn (r ) \ Λ olmak üzere σ ( x) = σ ( y ) olsun. O zaman
r
r
( x1 ,..., xn ) =
( y1 ,..., yn )
r − xn +1
r − yn +1
ve
xi =
r − xn +1
yi , (1 ≤ i ≤ n)
r − yn +1
olur. x ∈ Sνn (r ) \ Λ için,
ν
⟨ x, x⟩ = −∑ xi 2 +
i =1
n
x
∑
ν
i = +1
i
2
+ xn +12 = r 2
(2.4)
12
ifadesine Eş. 2.4’ün uygulanması ile
n
r − xn +1 ⎛ ν 2
⎞
y
yi 2 ⎟ = r + xn +1
−
+
∑
2 ⎜ ∑ i
i =ν +1
⎠
( r − yn+1 ) ⎝ i =1
(2.5)
elde edilir. Diğer taraftan y ∈ Sνn (r ) \ Λ için y, y = r 2 olmasından
ν
−∑ yi 2 +
i =1
n
y
∑
ν
i = +1
i
2
= r 2 − yn +12
(2.6)
yazılabilir. O zaman Eş. 2.5 ve Eş. 2.6’dan xn +1 = yn +1 bulunur. Eş. 2.4’den
xi = yi , 1 ≤ i ≤ n + 1 elde edilir. Bu ise σ ’nın birebir olması demektir.
∀x ∈ Rνn \ Hνn−−11 (r ) için σ ( x) = x olacak şekilde ∃x = σ −1 ( x ) ∈ Sνn (r ) \ Λ mevcut
olduğundan σ dönüşümü örtendir.
2.2. Teorem
σ , konform dönüşümdür [4].
İspat
x ∈ Rνn \ Hνn−−11 (r ) için
σ −1 ( x ) =
r
r + x, x
2
olduğunu biliyoruz.
( 2rx ,..., 2rx ,
1
n
x, x − r2 )
13
Şimdi Rνn ’nin standart bazı {e1 ,..., en } ve ε i = ei , ei ,
n
∑ε x
i i
i =1
2
= x, x , 1 ≤ k , l ≤ n
olmak üzere
(
)
2 2
2
⎧ 2 2
∂σ −1 ⎪ 2r ( r + x , x ) − 4ε k xk r / ( r + x , x
=⎨
2
∂xk
⎪( −4ε k xk x r 2 ) / ( r 2 + x , x )
⎩
∂σ n +1−1
4ε k xk r 3
=
∂xk
(r2 + x, x
)
)
2
, k=
, k≠
(2.7)
(2.8)
2
kısmi türevleri bulunur.
Vx , Tx Rνn ’nin bir tanjant vektörü olsun. Bu durumda Rνn +1 ’in standart bazı
{e1 ,..., en+1} için yarı-Öklidiyen uzayda (σ −1 )* = σ *−1
σ *−1 : Tx Rνn → Tσ
n +1
R n +1 , σ *−1 (Vx ) = ∑ ε Vx [σ
−1
(x) ν
−1
olmak üzere
]e
(2.9)
=1
türev dönüşümünü verelim. Burada Vx [σ
−1
n
] = ∑ ε kVk ( x )
k =1
∂σ −1
olduğundan Eş. 2.7
∂xk
ve Eş. 2.8’den
⎛ n
⎞
−4r 2 x ⎜ ∑ xkVk ( x ) ⎟
2 r 2ε V ( x )
k =1
⎝
⎠
−1
+ 2
Vx [σ ] =
, 1≤ ≤ n
2
(r + x, x )
(r2 + x, x )
(2.10)
⎛ n
⎞
4r 3 ⎜ ∑ xkVk ( x ) ⎟
⎝ k =1
⎠
Vx [σ n +1−1 ] =
2
2
(r + x, x )
(2.11)
14
elde edilir. Eş. 2.10 ve Eş. 2.11 eşitlikleri Eş.2.9’a uygulandıktan sonra 1 ≤ ≤ n + 1
için ε = ε alınması halinde
⎛ n
⎞
−4r 2 ⎜ ∑ xkVk ( x ) ⎟ x + 2r 2 ( r 2 + x , x ) ε V
⎝ k =1
⎠
A =
, 1≤ ≤ n
2
2
+
r
x
,
x
(
)
⎛ n
⎞
4r 3 ⎜ ∑ xkVk ( x ) ⎟
⎝ k =1
⎠
An +1 =
2
2
(r + x, x )
ifadelerini yazabiliriz. Böylece
n +1
σ *−1 (Vx ) = ∑ ε A e
(2.12)
=1
elde edilir. Eğer benzer işlemler Wx ∈ Tx Rνn için uygulanırsa;
⎛ n
⎞
−4r 2 ⎜ ∑ xkWk ( x ) ⎟ x + 2r 2 ( r 2 + x , x ) ε W
⎝ k =1
⎠
B =
, 1≤ ≤ n
2
2
(r + x, x )
⎛ n
⎞
4r 3 ⎜ ∑ xkWk ( x ) ⎟
⎝ k =1
⎠
Bn +1 =
2
2
(r + x, x )
ifadeleri ile birlikte
n +1
σ *−1 (Wx ) = ∑ ε B e
=1
bulunur. Bu durumda Eş. 2.12 ve Eş. 2.13 kullanılarak
(2.13)
15
σ *−1 (Vx ) , σ *−1 (Wx )
Rνn+1
=
4r 4
(r2 + x, x
)
2
Vx , Wx
Rνn
(2.14)
Eş. 2.14’de σ ’nın konform dönüşüm olduğunu gösterir.
2.1. Sonuç
σ , ν = 0 alınması halinde S n (r ) ’nin stereografik izdüşümüne dönüşür [4].
İspat
ν = 0 için S0n (r ) = S n (r ) , Λ = {(0,..., 0, r )} ve H −n1−1 (r ) = ∅ olması sebebiyle
σ : S n (r ) \ {(0,..., 0, r )} → R0n = E n dönüşümü
σ ( x) =
r
( x1 ,..., xn )
r − xn +1
ve dönüşümün tersi de
σ −1 ( x ) =
r
r + x
2
2
( 2rx ,..., 2rx , x
1
2
n
− r2
)
olarak bulunur.
2.1. Tanım
σ : Sνn (r ) \ Λ → Rνn \ Hνn−−11 (r ), σ ( x) =
r
( x1 ,..., xn ) dönüşümüne, 0 ≤ ν ≤ n için
r − xn +1
Sνn (r ) ’nin genelleştirilmiş stereografik izdüşümü denir [4].
16
2.2. Sonuç
ν = n olması halinde σ : S nn (r ) \ {(0,..., 0, r )} → Rnn \ S n −1 (r ) dönüşümü bulunur [4].
İspat
ν =n
olmak üzere
n
olduğundan
∑y
i =1
2
i
y ∈ H nn−−11 (r ) = { y ∈ Rnn | y, y = − r 2 } olsun.
dönüşümü elde edilir.
2.3. Sonuç
x ∈ Sνn (r ) \ Λ olmak üzere
(i ) xn +1 > r ⇔ σ ( x) ∈ { x ∈ Rνn | x , x < − r 2 }
(ii ) xn +1 < r ⇔ σ ( x) ∈ { x ∈ Rνn | x , x > − r 2 } .
İspat
x ∈ Sνn (r ) \ Λ için
(i ) xn +1 > r olsun. Eş. 2.2’den
r2 + x, x
i =1
= r 2 elde edilir. Bu eşitlikten H nn−−11 (r ) = S0n −1 (r ) bulunur. Böylece
σ : S nn (r ) \ {(0,..., 0, r )} → Rnn \ S n −1 (r )
r ( x, x − r2 )
n
y, y = −∑ yi 2
>r⇒
−2r 3
> 0 ⇒ x, x + r2 < 0
r2 + x, x
17
olduğundan
⟨ x , x ⟩ < −r 2
elde edilir.
Tersine σ ( x), σ ( x) < −r 2 olsun. Bu durumda Eş. 2.2’den
x, x =
r 3 + r 2 xn +1
2r 3
< −r 2 ⇒
<0
r − xn +1
r − xn +1
ve r > 0 olmasından xn +1 > r elde edilir.
(ii ) Benzer
olarak
xn +1 < r
σ ( x), σ ( x) > −r ise xn +1 =
2
ise
σ ( x), σ ( x) > −r 2
r ( σ ( x), σ ( x) − r 2 )
σ ( x), σ ( x) + r 2
bulunur.
Tersine
< r olarak bulunur.
2.4. Sonuç
ν = n için x ∈ Snn (r ) \ {(0,..., 0, r )} ve B = {x ∈ R n | x
Rn
< r} R n ’de açık yuvar
olsun. O zaman
(i ) xn +1 > r ⇔ σ ( x) ∈ R n \ B
(ii ) xn +1 < r ⇔ σ ( x) ∈ B .
İspat
⎧
Sonuç 2.2’den S n −1 (r ) = ⎨ x ∈ R n : x
⎩
2
R
n
n
⎫
= ∑ xi 2 = r 2 ⎬ olacağından
i =1
⎭
18
σ : S nn (r ) \ {(0,..., 0, r )} → Rnn \ S n −1 (r )
dönüşümü bulunur. Bu durumda
(i ) xn +1 > r olsun. σ ( x) = x ∈ Rnn \ S n −1 (r ) olmak üzere
n
x, x
Rnn
= −∑ xi 2
i =1
n
ve Sonuç 2.3 (i)’den −∑ xi 2 < − r 2 olur. O halde
x
i =1
olduğundan x
Rn
n
= ∑ xi 2 > r 2 ve r > 0
2
Rn
i =1
> r bulunur. Buradan σ ( x) = x ∈ R n / B .
Tersine σ ( x) = x ∈ R n / B olsun.
x
R
n
>r⇒ x
2
R
n
olduğundan x , x
n
n
i =1
i =1
= ∑ xi 2 > r 2 ⇒ −∑ xi 2 < −r 2
Rnn
< − r 2 dir. O halde ν = n için Sonuç 2.3 (i)’den xn +1 > r .
(ii ) xn +1 < r olsun. σ ( x) = x ∈ Rnn \ S n −1 (r ) ise x , x
n
gereğince −∑ xi 2 > − r 2 .
i =1
Bu durumda
x
2
Rn
n
= ∑ xi 2 < r 2 ⇒ x
i =1
Rn
<r
n
Rnn
= −∑ xi 2 ve Sonuç 2.3 (ii )
i =1
19
olduğundan x = σ ( x) ∈ B olur. Tersi de benzer şekilde gösterilir.
2.5. Sonuç
x ∈ Sνn (r ) olmak üzere;
xn +1 = − r ⇔ σ ( x), Rνn \ Hνn−−11 (r ) cümlesinin bir null noktasıdır [4].
İspat
Eğer x ∈ Sνn (r ) \ Λ ise
ν
x, x = r 2 ⇒ − ∑ xi 2 +
i =1
n
x
∑
ν
2
i
i = +1
=0
olup z = ( x1 ,..., xn ) ∈ Rνn için
z, z = 0
olup xn +1 = − r için σ ( x) =
(2.15)
z
ve Eş. 2.15’den
2
σ ( x),σ ( x) = 0
bulunur.
Tersine Eş. 2.2’den xn +1 =
bulunur.
r x, x − r3
r2 + x, x
ve x , x = 0 olduğundan xn +1 = −r olarak
20
3. PSEUDOKÜRELER İÇİN GENELLEŞTİRİLMİŞ İNVERSİYON
σ,
genelleştirilmiş
stereografik
izdüşüm,
Φ,
Ω = {x ∈ Rνn +1 | xn +1 = 0}
hiperdüzlemine göre Rνn +1 ’in yarı-Öklidiyen yansıması ve Λ , Rνn ’nin orijindeki
null-konisi olsun. Bu durumda aşağıdaki teorem,
Sνn −1 (r ) ’in inversiyonunu
tanımlamamıza imkân verir.
3.1. Teorem
Ψ dönüşümü 0 ≤ ν ≤ n − 1 için
Ψ = σ Φ σ −1 : Rνn \ ( Hνn−−11 (r ) ∪ Λ ) → Rνn \ ( Hνn−−11 (r ) ∪ Λ ) , Ψ ( x ) =
r2x
x, x
şeklinde tanımlansın. Bu durumda Sνn −1 (r ) , Ψ dönüşümü altında değişmezdir [4].
İspat
x ∈ Sνn −1 (r ) ise x , x = r 2 ve Ψ nin tanımından Ψ ( x ) = x dir. O zaman
Ψ ( x ), Ψ ( x ) = x , x = r 2
olduğu görülür.
3.1. Tanım
Ψ dönüşümüne, Sνn −1 (r ) pseudoküresine göre genelleştirilmiş inversiyon denir [4].
21
3.1. Sonuç
ν = 0 ise Ψ dönüşümü E n Öklidiyen uzayında S n −1 (r ) küresine göre inversiyon ile
çakışır [4].
İspat
ν = 0 için x , x
Ψ( x ) =
n
R0n
= ∑ xi 2 = x
i =1
2
Rn
olup Ψ ’nin tanımından
r2x
x
(3.1)
2
Rn
eşitliği elde edilir. Eş. 3.1 istenen inversiyon dönüşümüdür.
3.2. Sonuç
Rνn \ ( Hνn−−11 (r ) ∪ Λ) cümlesinin spacelike ve timelike noktaları Ψ dönüşümü altında
değişmezdir [4].
İspat
x ∈ Rνn \ ( Hνn−−11 (r ) ∪ Λ ) olmak üzere;
x spacelike ise Ψ ( x ), Ψ ( x ) =
r4
> 0 olduğundan Ψ ( x ) spacelike,
x, x
r4
< 0 olduğundan Ψ ( x ) timelike
x timelike ise Ψ ( x ), Ψ ( x ) =
x, x
olur. O halde Rνn \ ( Hνn−−11 (r ) ∪ Λ) cümlesinin spacelike ve timelike noktaları Ψ
dönüşümü altında değişmez.
22
3.2. Teorem
Ψ , Sνn −1 (r ) ’in genelleştirilmiş inversiyonu olsun. Bu takdirde Ψ = Ψ −1 dir [4].
İspat
x ∈ Rνn \ ( Hνn−−11 (r ) ∪ Λ ) olsun.
⎛ r2x
Ψ 2 ( x ) = Ψ ( Ψ ( x ) ) = Ψ ⎜⎜
⎝ x, x
⎞
⎟⎟ =
⎠
⎛ r2x ⎞
r2 ⎜
⎟
⎝ x, x ⎠
r2x
r2x
,
x, x
x, x
=x
(3.2)
O halde Eş. 3.2’den
Ψ2 (x ) = x ⇒ Ψ2 = Ι
olmasından istenen elde edilmiş olur.
3.3. Sonuç
M 1 = { x ∈ Rνn | x , x < −r 2 } , M 2 = { x ∈ Rνn | − r 2 < x , x < 0}
N1 = { x ∈ Rνn | − r 2 < x , x } , N 2 = { x ∈ Rνn | x , x < −r 2 }
cümlelerine göre i = 1, 2 için Ψ |M i : M i → N i dönüşümü örtendir [4].
İspat
∀y ∈ N i için Ψ |M i ( x ) = y olacak şekilde ∃x ∈ M i var olduğunu göstermemiz
gerekir.
23
i = 1 için y ∈ N1 olsun. Bu durumda
− r < y , y ⇒ Ψ |M1 ( x ), Ψ |M1
2
r4 + r2 x, x
r4
2
(x ) =
> −r ⇒
>0
x, x
x, x
elde edilir.
I. durum, r 4 + r 2 x , x > 0 ve x , x > 0 için
r 2 x , x > −r 4 ⇒ x , x > −r 2 ⇒ x , x > 0
olur.
II. durum, r 4 + r 2 x , x < 0 ve x , x < 0 için
r 2 x , x < −r 4 ⇒ x , x < −r 2
olur.
O halde II. durumdan ∃x ∈ M 1 olup Ψ |M1 örtendir.
i = 2 için y ∈ N 2 olsun. Bu durumda
y , y < − r ⇒ Ψ |M 2 ( x ), Ψ |M 2
2
r4 + r2 x, x
r4
2
(x ) =
< −r ⇒
<0
x, x
x, x
elde edilir.
I. durum, r 4 + r 2 x , x > 0 ve x , x < 0 için
24
r 2 x , x > −r 4 ⇒ x , x > −r 2 ve x , x < 0 ⇒ −r 2 < x , x < 0
olur.
II. durum, r 4 + r 2 x , x < 0 ve x , x > 0 olması halinde çelişki olur.
O halde I. durumdan ∃x ∈ M 2 olup Ψ |M 2 örtendir.
3.4. Sonuç
M 1′ = { x ∈ Rνn | 0 < x , x < r 2 } , M 2′ = { x ∈ Rνn | r 2 < x , x
}
N1′ = { x ∈ Rνn | r 2 < x , x } , N 2′ = { x ∈ Rνn | x , x < r 2 }
cümlelerine göre i = 1, 2 için Ψ |M ′ : M i′ → N i′ dönüşümü örtendir [4].
i
İspat
∀y ∈ N i′ için Ψ |M ′ ( x ) = y olacak şekilde ∃x ∈ M i′ var olduğunu göstermemiz
i
gerekir.
i = 1 için y ∈ N1′ olsun.
y , y > r ⇒ Ψ |M ′ ( x ), Ψ |M ′
2
1
1
r4 − r2 x, x
r4
2
(x ) =
>r ⇒
>0
x, x
x, x
elde edilir.
I. durum, r 4 − r 2 x , x > 0 ve x , x > 0 için
25
r 2 x , x < r 4 ⇒ x , x < r 2 ve x , x > 0 ⇒ 0 < x , x < r 2
olur.
II. durum, r 4 − r 2 x , x < 0 ve x , x < 0 olması halinde çelişki olur.
O halde I. durumdan ∃x ∈ M 1′ olup Ψ |M ′ örtendir.
1
i = 2 için y ∈ N 2′ olsun.
y , y < r 2 ⇒ Ψ |M ′ ( x ), Ψ |M ′ ( x ) =
2
2
r4 − r2 x, x
r4
< r2 ⇒
<0
x, x
x, x
elde edilir.
I. durum, r 4 − r 2 x , x > 0 ve x , x < 0 için
r 2 x , x < r 4 ⇒ x , x < r 2 ve x , x < 0 ⇒ x , x < 0
olur.
II. durum, r 4 − r 2 x , x < 0 ve x , x > 0 için
r2 x, x > r4 ⇒ x, x > r2
olur.
O halde II. durumdan ∃x ∈ M 2′ olup Ψ |M ′ örtendir
2
26
4. PSEUDOHİPERBOLİK UZAY İÇİN GENELLEŞTİRİLMİŞ
STEREOGRAFİK İZDÜŞÜM
Bu
bölümde
[4]’de
anti-izometri
kullanılarak
bulanabileceği
söylenen
pseudohiperbolik uzaylar için stereografik izdüşüm, bu anti-izometriye ihtiyaç
duyulmadan elde edilecektir. Ayrıca Bölüm 2’de verilen teorem ve sonuçlar,
pseudohiperbolik uzayın genelleştirilmiş stereografik izdüşümü için ifade ve ispat
edilecektir.
Şekil 4.1. r-yarıçaplı pseudohiperbolik ( H 02 (r ) )
27
p = ( − r , 0,..., 0 ) ∈ Hνn−1 (r ) , Λ = { x = ( x1 ,..., xn +1 ) ∈ Hνn−1 (r ) | x1 = −r} hiperdüzlemi ve
x ∈ Hνn−1 (r ) \ Λ için x = τ ( x) ∈ { x ∈ Rνn +1 | x1 = 0} olsun. Şekil 4.1 yardımıyla
ox = op + μ px , px = μ px
eşitliği yazılabilir. Bu durumda x1 ≠ −r için μ =
xj =
r
olup,
r + x1
r
xj , 2 ≤ j ≤ n +1
r + x1
(4.1)
elde edilir.
x, x =
r2
( r + x1 )
2
u, u , ( x2 ,..., xn +1 ) = u ∈ Rνn−1
ve x ∈ Hνn−1 (r ) için x, x = − r 2 ise u , u = x12 − r 2 eşitliğinden
x1 =
r x, x + r3
r2 − x, x
(4.2)
bulunur. Eş. 4.1 ve Eş. 4.2’den x , x ≠ r 2 olmak üzere
xj =
2r 2
xj , 2 ≤ j ≤ n +1
r2 − x, x
bulunur. Burada Sνn−−11 (r ) = {x ∈ Rνn−1 | x, x = r 2 } olduğundan
(4.3)
28
τ : Hνn−1 (r ) \ Λ → Rνn−1 \ Sνn−−11 (r ) , τ ( x) =
r
( x2 ,..., xn+1 )
r + x1
dönüşümünü elde ederiz.
Bu dönüşümün tersinin de Eş. 4.2 ve Eş. 4.3’den
τ −1 : Rνn−1 \ Sνn−−11 (r ) → Hνn−1 (r ) \ Λ , τ −1 ( x ) =
r
r − x, x
2
(( r
2
+ x , x ) , 2rx2 ,..., 2rxn +1
)
olduğunu görürüz.
4.1. Teorem
τ dönüşümü birebir ve örtendir.
İspat
x, y ∈ Hνn−1 (r ) \ Λ için τ ( x) = τ ( y ) olsun. Bu durumda
r
r
( x2 ,..., xn +1 ) =
( y2 ,..., yn +1 )
r + x1
r + y1
ve
xj =
r + x1
y j , (2 ≤ j ≤ n + 1)
r + y1
olur. x ∈ Hνn−1 (r ) \ Λ olduğundan
(4.4)
29
ν
x, x = − x12 − ∑ xi 2 +
i=2
n +1
x
∑
ν
i = +1
i
2
= −r 2
eşitliğine Eş.4.4’ün uygulanması ile
(r + x1 ) 2 ⎛ ν 2 n +1 2 ⎞
− y + ∑ yi ⎟ = x12 − r 2
2 ⎜ ∑ i
i =ν +1
⎠
( r + y1 ) ⎝ i =2
(4.5)
elde edilir. Diğer taraftan, y ∈ Hνn−1 (r ) \ Λ için y, y = − r 2 olduğundan
ν
−∑ yi 2 +
i=2
n +1
y
∑
ν
i = +1
i
2
= y12 − r 2
(4.6)
yazılabilir. O zaman Eş. 4.5 ve Eş. 4.6’dan x1 = y1 bulunur. Son olarak Eş. 4.4’den
x j = y j , 2 ≤ j ≤ n + 1 elde edilir. Böylece τ dönüşümü birebirdir.
İkinci olarak;
∀x ∈ Rνn−1 \ Sνn−−11 (r ) için τ ( x) = x olacak şekilde
⎛ r ( x, x + r2 )
2rx
2rx2
∃x = ⎜ 2
, 2
,..., 2 n +1
⎜ r − x, x
r − x, x
r − x, x
⎝
mevcut olduğundan τ dönüşümü örtendir.
4.2. Teorem
τ , konform dönüşümdür.
⎞
⎟ ∈ Hνn−1 (r ) \ Λ
⎟
⎠
30
İspat
Herhangi x ∈ Rνn−1 \ Sνn−−11 (r ) için
⎛ r x , x + r3
⎞
2r
2r
, 2
x2 ,..., 2
xn +1 ⎟⎟
τ ( x ) = ⎜⎜ 2
r − x, x
⎝ r − x, x r − x, x
⎠
−1
olduğu gösterildi.
Şimdi Rνn−1 ’nin standart bazı
{e2 ,..., en+1} , ε j =
ej , ej ,
n +1
x , x = ∑ ε j x j 2 olmak
j =2
üzere 2 ≤ k , l ≤ n + 1 için
4ε k xk r 3
∂τ 1−1
=
∂xk
(r2 − x, x
)
(4.7)
2
(
)
2 2
2
⎧ 2 2
∂τ −1 ⎪ 2r ( r − x , x ) + 4ε k xk r / ( r − x , x
=⎨
2
∂xk
⎪( 4ε k xk x r 2 ) / ( r 2 − x , x )
⎩
)
2
, k=
, k≠
(4.8)
kısmi türevleri bulunur.
Rνn +1 ’in standart bazı {e1 ,..., en +1} ve Vx , Tx Rνn−1 ’nin bir tanjant vektörü olsun. Bu
durumda yarı-Öklidiyen uzayda (τ −1 ) = τ *−1 için
*
τ *−1 : Tx Rνn−1 → Tτ
n +1
−1
R n +1 , τ *−1 (Vx ) = ∑ ε Vx [τ
(x ) ν
türev dönüşümünü ele alalım.
=1
−1
]e
(4.9)
31
Vx [τ
−1
n +1
] = ∑ ε kVk ( x )
k =2
∂τ −1
, 1 ≤ ≤ n +1
∂xk
olmak üzere Eş. 4.7 ve Eş. 4.8’den
Vx [τ 1−1 ] =
4r 3
(r2 − x, x
n +1
)
2
∑ x V (x )
k =2
k
k
⎛ n +1
⎞
4r 2 x ⎜ ∑ xkVk ( x ) ⎟
2
⎝ k =2
⎠ + 2r ε V ( x )
Vx [τ −1 ] =
2
(r2 − x, x )
(r2 − x, x )
(4.10)
(4.11)
elde edilir. Eş. 4.10 ve Eş. 4.11 eşitlikleri Eş.4.9’a uygulandıktan sonra 1 ≤ ≤ n + 1
için ε = ε alınması halinde kolay gösterim açısından
⎛ n +1
⎞
4r 3 ⎜ ∑ xkVk ( x ) ⎟
⎝ k =2
⎠
R1 =
2
2
(r − x, x )
⎛ n +1
⎞
4r 2 x ⎜ ∑ xkVk ( x ) ⎟ + 2r 2 ( r 2 − x , x ) ε V ( x )
⎝ k =2
⎠
R =
, 2 ≤ ≤ n +1
2
(r2 − x, x )
eşitliklerinin yazılmasıyla
n +1
τ *−1 (Vx ) = ∑ ε R e
=1
elde edilir. Benzer şekilde Wx ∈ Tx Rνn−1 için
(4.12)
32
⎛ n +1
⎞
4r 3 ⎜ ∑ xkWk ( x ) ⎟
⎝ k =2
⎠
S1 =
2
2
(r − x, x )
⎛ n +1
⎞
4r 2 x ⎜ ∑ xkWk ( x ) ⎟ + 2r 2 ( r 2 − x , x ) ε W ( x )
⎝ k =2
⎠
S =
, 2 ≤ ≤ n +1
2
(r2 − x, x )
eşitliklerinin yardımıyla
n +1
τ *−1 (Wx ) = ∑ ε S e
(4.13)
=1
şeklinde ifade edilir. Bu durumda Eş. 4.12 ve Eş. 4.13’den
τ *−1 (Vx ) ,τ *−1 (Wx )
Rνn+1
=
4r 4
(r2 − x, x
)
2
Vx ,Wx
Rνn−1
(4.14)
elde edilir.
4.1. Tanım
1 ≤ v ≤ n + 1 için
τ : Hνn−1 (r ) \ Λ → Rνn−1 \ Sνn−−11 (r ) , τ ( x) =
r
( x2 ,..., xn+1 )
r + x1
dönüşümüne, pseudohiperbolik uzayda Hνn−1 (r ) ’nin genelleştirilmiş stereografik
izdüşümü denir.
33
4.1. Sonuç
ν = 1 için τ : H n (r ) \ Λ → E n \ S n −1 (r ) döşümü elde edilir.
İspat
H 0n (r ) = H n (r ) = { z ∈ R1n +1 | z , z = −r 2 }
ve
R0n = E n
olsun.
Bu
durumda
S0n −1 (r ) = S n −1 (r ) = { z = ( z2 ,..., zn +1 ) ∈ R n | z , z = r 2 } küresi ile birlikte ν = 1 özel
halinde
τ : H n (r ) \ Λ → E n \ S n −1 (r )
bulunur.
4.2. Sonuç
ν = n + 1 için τ : S n (r ) \ {(− r ,0,...,0)} → Rnn \ Snn (r ) haline dönüşür.
İspat
H nn (r ) = { z ∈ Rnn++11 | z , z = −r 2 } olsun. z ∈ Rnn++11 için
n +1
∑z
i =1
i
2
n +1
z , z = −∑ zi 2 olduğundan
i =1
= r 2 ve z ∈ S n (r ) olur. Yani H nn (r ) = S n (r ) .
Böylece ν = n + 1 için τ : S n (r ) \ {(− r ,0,...,0)} → Rnn \ S nn (r ) dönüşümü elde edilir.
34
4.2. Tanım
τ
stereografik izdüşümünün
H +n (r ) = { z ∈ R1n +1 | z , z = −r 2 , z1 ≥ r}
cümlesine
kısıtlanmışı olan
τ H : H +n (r ) \ Λ → R n \ S n −1 (r )
dönüşümüne hiperbolik n-uzayın stereografik izdüşümü denir.
H +n (r ) hiperbolik uzay üzerine kısıtlanmış olan τ H stereografik izdüşümü [10]’daki
stereografik izdüşüm ile örtüşmektedir.
4.3. Sonuç
x ∈ Hνn−1 (r ) \ Λ olmak üzere
(i ) x1 > −r ⇔ τ ( x) ∈ { x ∈ Rνn−1 | x , x < r 2 }
(ii ) x1 < −r ⇔ τ ( x) ∈ { x ∈ Rνn−1 | x , x > r 2 } .
İspat
x ∈ Hνn−1 (r ) \ Λ için
(i ) x1 > −r olsun. Eş. 4.2’den x1 =
r x, x + r3
r2 − x, x
> − r olduğundan
Buradan r > 0 olmasından dolayı x , x < r 2 bulunur.
2r 3
> 0 dir.
r2 − x, x
35
Tersine x , x < r 2 olsun. Bu durumda Eş. 2.2’den
x, x =
r 2 ( x1 − r )
( x1 + r )
yazılabilir.
r 2 ( x1 − r )
Dolayısıyla
< r 2 eşitsizliğinden
( x1 + r )
−2r
<0
x1 + r
(4.15)
elde edilir. Son olarak r > 0 olması ile Eş. 4.15’den x1 > −r elde edilir.
(ii ) Benzer olarak x1 < −r ise ⟨ x , x ⟩ > r 2 ve tersine ⟨ x , x ⟩ > r 2 iken x1 < −r bulunur.
4.4. Sonuç
x ∈ Hνn−1 (r ) olmak üzere
x1 = r ⇔ τ ( x), Rνn−1 \ Sνn−−11 (r ) cümlesinin bir null noktasıdır.
İspat
ν
Eğer x ∈ Hνn−1 (r ) ve x1 = r ise −∑ xi 2 +
i =2
n +1
x
∑
ν
i = +1
u, u = 0
bulunur. x1 = r için τ ( x) =
τ ( x),τ ( x) = 0
i
2
= 0 olup u = ( x2 ,..., xn +1 ) ∈ Rνn−1 için
(4.16)
u
ve Eş. 4.16’den
2
(4.17)
36
O halde Eş. 4.17’den τ ( x) , Rνn−1 \ Sνn−−11 (r ) ’in bir null noktasıdır.
Tersine Eş. 4.2’den x1 =
r τ ( x),τ ( x) + r 3
r 2 − τ ( x),τ ( x)
ve τ ( x),τ ( x) = 0 olduğundan x1 = r .
37
5. PSEUDOHİPERBOLİK UZAY İÇİN GENELLEŞTİRİLMİŞ İNVERSİYON
τ , pseudohiperbolik uzayın genelleştirilmiş stereografik izdüşümü olsun. Bu
durumda Φ , Ω = {x ∈ Rνn +1 | x1 = 0} hiperdüzlemine göre Rνn +1 ’in yarı-Öklidiyen
yansıması olmak üzere; Λ = { x = ( x2 ,..., xn +1 ) ∈ Rvn−1 | x , x = 0} cümlesi Rνn−1 ’nin
orijindeki null-konisi olsun. O halde aşağıdaki teorem Hνn−−21 (r ) için inversiyon
tanımlama imkânı verir.
5.1. Teorem
2 ≤ v ≤ n + 1 için
(
)
−r
x, x
( x2 ,..., xn+1 )
(
Ψ = τ Φ τ −1 : Rvn−1 \ Sνn−−11 (r ) ∪ Λ → Rvn−1 \ Sνn−−11 (r ) ∪ Λ
Ψ ( x2 ,..., xn +1 ) =
2
)
şeklinde tanımlı dönüşüm altında Hνn−−21 (r ) değişmez.
İspat
∀x = ( x2 ,..., xn +1 ) ∈ Hνn−−21 (r ) için x , x = −r 2 olup Ψ ’nin tanımından
Ψ ( x2 ,..., xn +1 ) = ( x2 ,..., xn +1 )
olduğu görülür. Bu takdirde Ψ ( x ), Ψ ( x ) = x , x = −r 2 olur.
38
5.1. Tanım
Ψ dönüşümüne, Hνn−−21 (r ) pseudohiperbolik uzayına göre genelleştirilmiş inversiyon
denir.
5.1. Sonuç
(
)
Rvn−1 \ Sνn−−11 (r ) ∪ Λ cümlesinin spacelike ve timelike noktaları Ψ dönüşümü altında
değişmezdir.
İspat
(
)
x ∈ Rvn−1 \ Sνn−−11 (r ) ∪ Λ olmak üzere
x spacelike ise
x , x > 0 için
Ψ ( x ), Ψ ( x ) =
r4
> 0 olduğundan Ψ ( x )
x, x
x , x < 0 için
Ψ ( x ), Ψ ( x ) =
r4
< 0 olduğundan Ψ ( x )
x, x
spacelikedır.
x
timelike ise
timelikedır.
5.2. Teorem
Ψ , Hνn−−21 (r ) için genelleştirilmiş inversiyon olsun. Bu takdirde Ψ = Ψ −1 dir.
İspat
(
)
x = ( x2 ,..., xn +1 ) ∈ Rvn−1 \ Sνn−−11 (r ) ∪ Λ için
39
⎛ −r 2 x
Ψ 2 ( x ) = Ψ ( Ψ ( x ) ) = Ψ ⎜⎜
⎝ x, x
⎞
⎟⎟ =
⎠
⎛ −r 2 x ⎞
−r 2 ⎜
⎟
⎝ x, x ⎠
−r 2 x −r 2 x
,
x, x
x, x
=x
O halde
Ψ2 = Ι
olur.
5.2. Sonuç
U1 = { x ∈ Rνn−1 | x , x < − r 2 } , U 2 = { x ∈ Rνn−1 | − r 2 < x , x < 0}
V1 = { x ∈ Rνn−1 | − r 2 < x , x } , V2 = { x ∈ Rνn−1 | x , x < − r 2 }
cümlelerine göre i = 1, 2 için Ψ |Ui : U i → Vi dönüşümü örtendir.
İspat
∀y = ( y2 ,..., yn +1 ) ∈ Vi için Ψ |Ui ( x ) = y olacak şekilde ∃x = ( x2 ,..., xn +1 ) ∈ U i var
olduğunu göstermemiz gerekir.
i = 1 için y ∈ V1 olmak üzere
r4 + r2 x, x
r4
2
− r < y , y ⇒ Ψ |U1 ( x ), Ψ |U1 ( x ) =
> −r ⇒
>0
x, x
x, x
2
elde edilir.
40
I. durum, r 4 + r 2 x , x > 0 ve x , x > 0 için
r 2 x , x > −r 4 ⇒ x , x > −r 2 ⇒ x , x > 0
olur.
II. durum, r 4 + r 2 x , x < 0 ve x , x < 0 için
r 2 x , x < −r 4 ⇒ x , x < −r 2
olur.
O halde II. durumdan ∃x ∈ U1 olup Ψ |U1 örtendir.
i = 2 için y ∈ V2 olmak üzere
y , y < − r 2 ⇒ Ψ |U 2 ( x ), Ψ |U 2 ( x ) =
r4 + r2 x, x
r4
< −r 2 ⇒
<0
x, x
x, x
elde edilir.
I. durum, r 4 + r 2 x , x > 0 ve x , x < 0 için
r 2 x , x > −r 4 ⇒ x , x > −r 2 ve x , x < 0 ⇒ −r 2 < x , x < 0
olur
II. durum, r 4 + r 2 x , x < 0 ve x , x > 0 olması halinde çelişki olur.
41
O halde I. durumdan ∃x ∈ U 2 olup Ψ |U 2 örtendir.
5.3. Sonuç
U1′ = { x ∈ Rνn−1 | 0 < x , x < r 2 } , U 2′ = { x ∈ Rνn−1 | r 2 < x , x
}
V1′ = { x ∈ Rνn−1 | r 2 < x , x } , V2′ = { x ∈ Rνn−1 | x , x < r 2 }
cümlelerine göre i = 1, 2 için Ψ |U ′ : U i′ → Vi′ dönüşümü örtendir.
i
İspat
∀y = ( y2 ,..., yn +1 ) ∈ Vi′ için Ψ |U ′ ( x ) = y olacak şekilde ∃x = ( x2 ,..., xn +1 ) ∈ U i′ var
i
olduğunu göstermemiz gerekir.
i = 1 için y ∈ V1′ olmak üzere
y , y > r 2 ⇒ Ψ |U ′ ( x ), Ψ |U ′ ( x ) =
1
1
r4 − r2 x, x
r4
> r2 ⇒
>0
x, x
x, x
elde edilir.
I. durum, r 4 − r 2 x , x > 0 ve x , x > 0 için
r 2 x , x < r 4 ⇒ x , x < r 2 ve x , x > 0 ⇒ 0 < x , x < r 2
olur.
II. durum, r 4 − r 2 x , x < 0 ve x , x < 0 olması halinde çelişki olur.
42
O halde I. durumdan ∃x ∈ U1′ olup Ψ |U ′ örtendir.
1
i = 2 için y ∈ V2′ olmak üzere
y , y < r 2 ⇒ Ψ |U ′ ( x ), Ψ |U ′ ( x ) =
2
2
r4 − r2 x, x
r4
< r2 ⇒
<0
x, x
x, x
elde edilir.
I. durum, r 4 − r 2 x , x > 0 ve x , x < 0 için
r 2 x , x < r 4 ⇒ x , x < r 2 ve x , x < 0 ⇒ x , x < 0
olur.
II. durum, r 4 − r 2 x , x < 0 ve x , x > 0 için
r2 x, x > r4 ⇒ x, x > r2
olur.
O halde II. durumdan ∃x ∈ U 2′ olup Ψ |U ′ örtendir.
2
43
6. STEREOGRAFİK İZDÜŞÜMÜN BAZI UYGULAMALARI
Bu bölümde hiperbolik 3-uzaydaki ( H +3 (1) ) bazı yüzey çeşitleri ve bunların
stereografik izdüşümleri incelendi. Şimdi H +3 (1) ’in Lorentziyen modelini ele alıp
bazı temel tanım ve teoremleri verelim.
6.1. Tanım
c bir reel sayı olmak üzere R14 ’de ω pseudo-normalli bir hiperdüzlem
HP(ω , c) = { x ∈ R14 | x, ω = c}
ile gösterilsin. Eğer
ω spacelike ise HP(ω , c) timelike hiperdüzlem,
ω timelike ise HP(ω , c) spacelike hiperdüzlem,
ω lightlike ise HP(ω , c) lightlike hiperdüzlem
denir [11].
6.2. Tanım
R14 ’ün standart bazı
{e0 , e1 , e2 , e3}
ve xi = ( x0i , x1i , x2i , x3i ) olmak üzere herhangi
x1 , x2 , x3 ∈ R14 için x1 ∧ x2 ∧ x3 vektörüne xi (i = 1, 2,3) vektörlerine pseudo-ortogonal
vektör denir ve
−e0
1
0
2
0
3
0
e1
e2
e3
1
1
2
1
3
1
1
2
2
2
3
2
x
x1 ∧ x2 ∧ x3 =
x
x
x
x
x
x31
x32
x
x
x
x33
44
determinantı ile ifade edilir [11].
6.3. Tanım
R14 ’de verilen
H (ω , c)
H +3 (1) ’in arakesiti ile belirlenen
hiperdüzlemiyle
Γ(ω , c) = H +3 (1) ∩ H (ω , c) yüzeyine;
H (ω , c) spacelike hiperdüzlem ise küre,
H (ω , c) timelike hiperdüzlem ise hiperküre,
H (ω , c) lightlike hiperdüzlem ise horoküre
denir [11].
Özel olarak Γ(ω , c) horoküre ise HS 2 (ω , c) = H +3 (1) ∩ H (ω , c) şeklinde gösterilir.
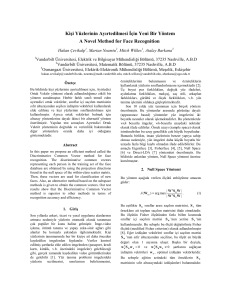
γ : I → H +3 (1) s yay parametreli regüler birim hızlı bir eğri olsun. O zaman
t ( s ) = γ ′( s )
n( s ) =
teğet
t ′( s ) − γ ( s )
t ′( s ) − γ ( s )
vektörüne
sahiptir.
birim
vektörüne
t ′( s ), t ′( s ) ≠ −1
sahiptir.
olması
Bununla
halinde
birlikte
e( s ) = γ ( s ) ∧ t ( s ) ∧ n( s ) vektörünü tanımlayalım. O zaman R14 ’ün γ boyunca bir
{γ ( s), t ( s), n( s), e( s)}
pseudo ortonormal bazı ele alınabilir. O halde t ′( s ), t ′( s ) ≠ −1
şartı ile aşağıdaki Serret-Frenet tipindeki formulleri yazabiliriz.
κ h ( s ) = t ′( s ) − γ ( s) , τ h ( s) =
olmak üzere
det ( γ ( s), γ ′( s ), γ ′′( s ), γ ′′′( s ) )
(κ h ( s ) )
2
45
γ ′( s ) = t ( s )
t ′( s ) = κ h ( s )n( s ) + γ ( s )
n′( s ) = -κ h ( s )t ( s) + τ h ( s )e( s )
e′( s ) = -τ h ( s )n( s )
şeklinde bulunur [11].
6.4. Tanım
κ h ( s ) ≡ 1 ve τ h ( s) ≡ 0 olması halinde γ ’ya bir horocycle denir [12].
6.1. Teorem
a0 ∈ H +3 (1) ve a1 , a2 ∈ S13 (1) için
ai , a j = δ ij ε j , (ε 0 = −1, ε1 = ε 2 = 1) olsun. Bu
durumda γ (0) = a0 , γ ′(0) = a1 , γ ′′(0) = a0 + a2 başlangıç şartları ile verilen horocycle
γ ( s) = a0 + sa1 +
s2
( a0 + a2 ) şeklinde tek türlü ifade edilir [12].
2
6.1. Örnek
U ⊂ R 2 nin açık bir altcümlesi için
x : U → H +3 (1) , x(u, v) = ( 2 cosh u,sin v, 2 sinh u , cos v)
regüler
bir
yüzey
olmak
E : U → S13 , E (u1 , u2 ) = e(u1 , u2 )
e(u , v) =
üzere
M = x (U )
olsun.
Bu
durumda
x’in de-Sitter Gauss dönüşümü olmak üzere
x(u , v)Λxu (u, v)Λxv (u , v)
şeklinde tanımlansın. v = v0 sabit değeri için
x(u , v)Λxu (u, v)Λxv (u , v)
a0 = x(0, v0 ) , a1 =
xu (u , v)
, a2 = e(0, v0 )
xu (u , v)
46
seçimleriyle ai , a j = δ ij ε j , (ε 0 = −1, ε1 = ε 2 = 1) olur. O halde Şekil 6.1, Teorem 6.1
gereğince v =
π
3
sabit değeri için tek türlü olan γ ( s ) = a0 + sa1 +
s2
( a0 + a2 )
2
horocycle’ ın τ H stereografik izdüşümü altındaki görüntüsüdür.
Şekil 6.1. Horocycle‘ın stereografik izdüşümü altındaki görüntüleri
6.5. Tanım
γ : I → H +3 (1) ve i = 1, 2 için ai : I → S13 (1) düzgün(diferensiyellenebilir) dönüşümler
ve
γ (t ), ai (t ) = a1 (t ), a2 (t ) = 0 olsun. a3 (t ) = γ (t ) ∧ a1 (t ) ∧ a2 (t ) birim spacelike
vektörü ile R14 ’ün bir pseudo-orthonormal bazı {γ , a1 , a2 , a3 } olsun. Bu durumda
(t ) = γ (t ) + a2 (t ) olmak üzere
s2
F(γ , a1 ,a2 ) : R × I → H (1) , F(γ ,a1 , a2 ) ( s, t ) = γ (t ) + sa1 (t ) +
(t )
2
3
+
şeklinde tanımlanan dönüşüme horodairesel yüzey denir [12].
6.2. Örnek
γ , a1 , a2 eğrileri
γ : I → H +3 (1) , γ (t ) = ( 2 cosh t , cos t , 2 sinh t ,sin t )
47
a1 : I → S13 (1) , a1 (t ) = (
2
1
2
1
sinh t , −
sin t ,
cosh t ,
cos t )
3
3
3
3
a2 : I → S13 (1) , a2 (t ) = (− cosh t , − 2 cos t , − sinh t , − 2 sin t )
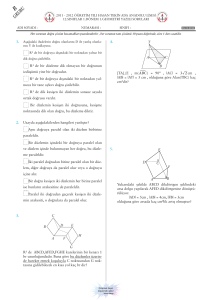
şeklinde tanımlansın. Bu durumda Şekil 6.2
F(γ , a1 ,a2 ) : R × I → H +3 (1) , F(γ ,a1 , a2 ) ( s, t ) = γ (t ) + sa1 (t ) +
s2
(t )
2
dönüşümü ile belirlenen horodairesel yüzeyin τ H stereografik izdüşümü altındaki
görüntüsüdür.
Şekil 6.2. Horodairesel yüzeyin stereografik izdüşümü altındaki görüntüleri
6.6. Tanım
{γ , a1 , a2 , a3}
pseudo-orthonormal bazı yardımıyla tanımlanan
ci (t ), 1 ≤ i ≤ 6
ifadelerine hiperbolik invaryant denir.
c1 (t ) = γ ′(t ), a1 (t ) = − γ (t ), a1′(t )
c2 (t ) = γ ′(t ), a2 (t ) = − γ (t ), a2′ (t )
c3 (t ) = γ ′(t ), a3 (t ) = − γ (t ), a3′ (t )
, c4 (t ) = a1′ (t ), a2 (t ) = − a1 (t ), a2′ (t ) ,
, c5 (t ) = a1′(t ), a3 (t ) = − a1 (t ), a3′ (t ) ,
, c6 (t ) = a2′ (t ), a3 (t ) = − a2 (t ), a3′ (t ) .
48
Bu invaryantlar ile horodairesel yüzeyler için aşağıdaki diferensiyel eşitlikler ifade
edilebilir.
γ ′(t ) = c1 (t )a1 (t ) + c2 (t )a2 (t ) + c3 (t )a3 (t ),
a1′(t ) = c1 (t )γ (t ) + c4 (t )a2 (t ) + c5 (t )a3 (t ),
a2′ (t ) = c2 (t )γ (t ) − c4 (t )a1 (t ) + c6 (t ) a3 (t ),
a3′ (t ) = c3 (t )γ (t ) + c5 (t )a1 (t ) − c6 (t )a2 (t ).
Bu diferensiyel eşitlikler matris formunda yazılırsa
c1 (t )
c2 (t ) c3 (t ) ⎤ ⎡ γ (t ) ⎤
⎡ γ ′(t ) ⎤ ⎡ 0
⎢ a′ (t ) ⎥ ⎢ c (t )
0
c4 (t ) c5 (t ) ⎥⎥ ⎢⎢ a1 (t ) ⎥⎥
⎢ 1 ⎥=⎢ 1
⎢ a2′ (t ) ⎥ ⎢ c2 (t ) −c4 (t )
0
c6 (t ) ⎥ ⎢ a2 (t ) ⎥
⎢
⎥ ⎢
⎥⎢
⎥
0 ⎦ ⎣ a3 (t ) ⎦
⎣ a3′ (t ) ⎦ ⎣ c3 (t ) −c5 (t ) −c6 (t )
elde edilir. Burada
c1 (t )
c2 (t ) c3 (t ) ⎤
⎡ 0
⎢ c (t )
c4 (t ) c5 (t ) ⎥⎥
0
C (t ) = ⎢ 1
∈ so(1,3)
⎢c2 (t ) −c4 (t )
c6 (t ) ⎥
0
⎢
⎥
0 ⎦
⎣ c3 (t ) −c5 (t ) −c6 (t )
katsayılar matrisi özel yarı-Ortogonal grup SO (1,3) ’ün Lie cebiri so(1,3) ’in
elemanıdır.
A(t0 ) ∈ SO(1,3) başlangıç şartı altında C : I → so(1,3) , C (t ) = A′(t ) A(t ) −1 ile tanımlı
düzgün eğri olacak şekilde bir tek A : I → SO(1,3) eğrisi mevcuttur. Bu C eğrisi
{γ (t ), a1 (t ), a2 (t ), a3 (t )} pseudoortonormal bazının hiperbolik invaryantıdır [12].
Bu durumda Whitney C ∞ topolojisi ile birlikte so(1,3) ’de düzgün eğrilerin uzayı
C ∞ ( I , so(1,3)) [12].
49
6.7. Tanım
I bir açık aralık olmak üzere C ∞ ( I , so(1,3) ) uzayına horodairesel yüzeylerin uzayı
denir [12].
6.8. Tanım
so(1,3) ’in bir lineer altuzayı
⎧
⎡0
⎪
⎢c
⎪
hf (1,3) = ⎨C = ⎢ 1
⎢ c2
⎪
⎢
⎪
⎣ c3
⎩
c1
0
−c4
c2
c4
0
−c5
−c6
c3 ⎤
⎫
⎪
⎥
c5 ⎥
⎪
∈ so(1,3) | c2 = c1 − c4 = 0 ⎬
c6 ⎥
⎪
⎥
⎪
0⎦
⎭
olmak üzere Whitney C ∞ topolojisi ile birlikte C ∞ ( I , hf (1,3) ) ikilisine horo-flat
horodairesel yüzeylerin uzayı denir [12].
6.9. Tanım
τ h (t ) ≡ 0 olmak üzere γ (t ) hiperbolik düzlem eğrisi olsun. Bu durumda
s2
a1 = e ve a2 (t ) = ± n(t ) için F(γ ,e, ± n ) ( s, t ) = γ (t ) + se + ( γ (t ) + n(t ) )
2
parametrizasyonu ile verilen yüzeye γ
hiperbolik düzlem eğrisinin binormal
horodairesel yüzeyi ve
a1 (t ) = n(t ) ve a2 = ∓ e için F(γ , n , ± e ) ( s, t ) = γ (t ) + sn(t ) +
s2
(γ (t ) ± e )
2
50
parametrizasyonu ile verilen yüzeye de γ hiperbolik düzlem eğrisinin asli normal
horodairesel yüzeyi denir [12].
6.3. Örnek
γ : I → H +3 (1) hiperbolik düzlem eğrisi
⎛
1
2
γ (t ) = ⎜⎜ 2 + ( 2 −
⎝
1 2 3 1
6
3 2 1 1 1
2 2⎞
)t ,
)t , t , + ( +
)t ⎟ ile verilsin.
+ (−
+
2 2
7 2
2 2 2
7 ⎟⎠
7
Bu durumda Şekil 6.3
⎛
⎞
7 ⎛7 2+ 7 ⎞ 2
6 ⎛ 13
3⎞ 2
2 1
2
n(t ) = ⎜ −
+ ⎜⎜
t
,
−
+
−
t
,
−
t
,
−
7
+
2
14
t
⎟⎟
⎟
⎜
⎟
⎟
⎜ 7
14
7 ⎜⎝ 14 4 ⎟⎠
7 28
⎝
⎠
⎝
⎠
(
⎛
3
3
⎜ 6
5
e = ⎜− ,−
, 0, 7
2
⎜ 7 2 7
⎜
⎝
)
⎞
⎟
⎟
⎟
⎟
⎠
olduğuna göre γ hiperbolik düzlem eğrisinin asli normal horodairesel yüzeyi
F(γ , n ,e ) ( s, t ) ’nin τ H altındaki görüntüsüdür.
Şekil 6.3. Asli normal horodairesel yüzeyin stereografik izdüşümü altındaki
görüntüleri
51
Şekil 6.4 de aynı γ hiperbolik düzlem eğrisinin F(γ ,e, n ) ( s, t ) ile belirlenen binormal
horodairesel yüzeyinin τ H altındaki görüntüsüdür.
Şekil 6.4. Binormal horodairesel yüzeyin stereografik izdüşümü altındaki
görüntüleri
52
KAYNAKLAR
1. Gladush, V., D., “Five dimensional general relativity and Kaluza-Klein theory”,
Theoretical and Mathematical Physics, 136(3):1312-1324 (2003).
2. Gladush, V., D., Galadgyi, M., V., “The model of the vacuum configuration and
the Kaluza-Klein space”, Journal of Physical Studies, 9(3):187-197 (2005).
3. Gladush, V., D., “A vacuum–like configuration in general relativity as a
manifestation of a Lorentz-invariant mode of five dimensional gravity”,
International Journal of Modern Physics, 16(1):711-736 (2007).
4. Karlığa, B., ”On the generalized stereographic projection”, Contributions to
Algebra and Geometry, 37(2): 329-336 (1996).
5. O’Neill, B., “Semi-Riemannian geometry”, Academic Press, New York, 46-58
(1983).
6. Karlığa, B., “Reflection groups on semi-Euclidean spaces”, Erc. Üniv. Fen. Bil.
Derg., 13(2): 98-109 (1997).
7. Bloom, W., M., “Linear Algebra and Geometry”, Cambridge University Press,
London, 364-369 (1979).
8. Ratcliffe, J., G., “Foundations of hyperbolic manifolds 2nd ed.)”, SpringerVerlag, Graduate Texts in Mathematics 149, New York, 35-36, 61-62 (2006).
9. Borisovich, Y., Bliznyakov, N., Izrailevich, Y. and Romenko, T.,”Introduction to
topology”, Oleg Efimov, Mir Publishers, Moscow, 149-164 (1985).
10. Perdigão do Carmo, M., “Riemannian geometry”, Francis Flaherty, Instituto de
Matematica Pura e Aplicada, Birkhäuser Boston, 184-185 (1992).
11. Izumiya, S., Pei, D. And Sano, T., “Horospherical surfaces of curves in
hyperbolic space”, Publ. Math. Debrecen, 64(1-2):1-13 (2004).
12. Izumiya, S., Saji, K. and Takahashi, M., “Horospherical flat surfaces in
hyperbolic 3-space”, Hokkaido University Preprint Series in Mathematics,
Preprint, (2007).
53
EKLER
54
EK-1 Matematica Programı ile Stereografik İzdüşüm Örnekleri
1.1. Örnek
γ : I → H +3 (1) hiperbolik uzay eğrisi için temel hesaplamalar ve tanımlamalar
J işaret matrisi,
J={{-1,0,0,0},{0,1,0,0},{0,0,1,0},{0,0,0,1}}
γ eğrisi,
γ 0 [ s_ ] == γ 0 [ s ]
γ 1[ s_ ] == γ 1[ s]
γ 2 [ s_ ] == γ 2 [ s]
γ 3[ s_ ] == γ 3[ s]
γ [ s_ ] = {γ 0 [ s ], γ 1[ s], γ 2 [ s], γ 3[ s]}
γ ( s), γ ( s) skalar çarpımı,
J .γ ( s ).γ ( s )
γ ′( s) normu,
1
Abs[ J .γ '[ s].γ '[ s ]]2
γ ( s ), t ( s ), n( s ), e( s ) Serret-Frenet vektörlerinin tanımlanması,
t[ s_ ] = γ '[ s ]
55
EK-1 (Devam) Matematica Programı ile Stereografik İzdüşüm Örnekleri
n0 [ s ] =
n1[ s ] =
n2 [ s ] =
n3 [ s ] =
γ 0 ''[ s] − γ 0 [ s]
1
Abs[( J .(γ ''[ s ] − γ [ s ]).(γ ''[ s ] − γ [ s ])] 2
γ 1 ''[ s ] − γ 1[ s ]
Abs[( J .(γ ''[ s ] − γ [ s ]).(γ ''[ s ] − γ [ s ])]
γ 2 ''[ s] − γ 2 [ s]
1
2
1
Abs[( J .(γ ''[ s ] − γ [ s ]).(γ ''[ s ] − γ [ s ])] 2
γ 3 ''[ s ] − γ 3[ s ]
1
Abs[( J .(γ ''[ s ] − γ [ s ]).(γ ''[ s ] − γ [ s ])] 2
n[ s_ ] = {n0 [ s ], n1[ s ], n2 [ s ], n3 [ s ]}
e( s) = γ ( s) ∧ t ( s) ∧ n( s) vektörü için,
M = {{1,1,1,1},{γ 0 [ s ], γ 1[ s ], γ 2 [ s ], γ 3 [ s]},{γ '0 [ s ], γ '1[ s ], γ '2 [ s ], γ '3 [ s ]},
{n0 [ s], n1[ s], n2 [ s ], n3 [ s ]}}
e0 [ s ] = − Minors[ M ][[4, 4]]
e1[ s] = − Minors[ M ][[4,3]]
e2 [ s ] = Minors[ M ][[4, 2]]
e3 [ s ] = − Minors[ M ][[4,1]]
e[ s_ ] = {e0 [ s ], e1[ s ], e2 [ s ], e3 [ s ]}
κ h ( s ) ’nin tanımlanması,
1
κ h [ s_ ] = Abs[( J .(γ ''[ s ] − γ [ s]).(γ ''[ s ] − γ [ s ])] 2
τ h ( s) ’nin tanımlanması,
τ h [ s_ ] = −
Det[{γ [ s ], γ '[ s ], γ ''[ s ], γ '''[ s ]}]
(κ h [ s ]) 2
56
EK-1 (Devam) Matematica Programı ile Stereografik İzdüşüm Örnekleri
H +3 (1) için τ H stereografik izdüşümü,
#2
#3
#4
,
,
}&
1 + #1 1 + #1 1 + #1
τH ={
1.2. Örnek
Bir γ : I → H +3 (1), γ ( s) = ( 2 cosh s,cos s, 2 sinh s,sin s ) hiperbolik uzay eğrisi ve
a1 : I → S13 (1) , a1 (t ) = (
2
1
2
1
sinh t , −
sin t ,
cosh t ,
cos t )
3
3
3
3
a2 : I → S13 (1) , a2 (t ) = (− cosh t , − 2 cos t , − sinh t , − 2 sin t )
ve a3 = γ ∧ a1 ∧ a2 olmak üzere R14 için {γ , a1 , a2 , a3 } bir pseudo-ortonormal bazdır.
Bu durumda
γ
horocycle eğrisi tarafından üretilen horodairesel yüzeyin
parametrizasyonu
F(γ , a1 ,a2 ) : R × I → H +3 (1)
⎛
s2
s 2
(−1 + 2) 2
sS int
F(γ ,a1 ,a2 ) (s, t ) = ⎜⎜ 2Cosht + (−1 + 2)Cosht +
Sinht, Cost −
s Cost −
2
2
3
3
⎝
⎞
2
(−1 + 2) 2
sCost
(−1 + 2) 2
+ S int −
s Cosht + 2Sinht +
s Sinht,
s S int ⎟⎟
3
2
2
3
⎠
olarak bulunur. O halde Im( F(γ ,a1 , a2 ) ) horodairesel yüzeyinin stereografik izdüşümü
57
EK-1 (Devam) Matematica Programı ile Stereografik İzdüşüm Örnekleri
⎛
(6 − 3(−1 + 2) s 2 )Cost − 2 3S int
,
2
⎝ 6 + 3(2 2 + (−1 + 2) s )Cosht + 2 s 6 Sinht
τ H ( F(γ ,a ,a ) ( s, t )) = ⎜⎜
1
2
2s 6Cosht + 3(2 2 + (−1 + 2) s 2 ) Sinht
,
6 + 3(2 2 + (−1 + 2) s 2 )Cosht + 2s 6Sinht
⎞
2s 3Cost + 3(2 − (−1 + 2) s 2 ) S int
⎟
6 + 3(2 2 + (−1 + 2) s 2 )Cosht + 2 s 6 Sinht ⎠⎟
olup sırasıyla −1 ≤ s ≤ 1, − 4 ≤ s ≤ 4, − 15 ≤ s ≤ 15 aralıklarında 0 < t ≤ 2π için
⎡ ⎧⎪
(6 − 3(−1 + 2) s 2 )Cost − 2 3S int
ParametricPlot3D ⎢ ⎨
,
2
⎢⎣ ⎪⎩ 6 + 3(2 2 + (−1 + 2) s )Cosht + 2 s 6 Sinht
2 s 6Cosht + 3(2 2 + (−1 + 2) s 2 ) Sinht
,
6 + 3(2 2 + (−1 + 2) s 2 )Cosht + 2 s 6 Sinht
⎫⎪
2 s 3Cost + 3(2 − (−1 + 2) s 2 ) S int
⎬,
6 + 3(2 2 + (−1 + 2) s 2 )Cosht + 2 s 6 Sinht ⎪⎭
{s, −1,1},{t , 0, 2 Pi}, Axes → None, Boxed → False]
komutu ile çizimi yapılır.
58
ÖZGEÇMİŞ
Kişisel Bilgiler
Soyadı, adı
: MAK, Mahmut
Uyruğu
: T.C.
Doğum tarihi ve yeri
: 11.06.1983 Ankara
Medeni hali
: Bekar
Telefon
: 0505 447 59 24
E-mail
: makmahmut@gazi.edu.tr
Eğitim
Derece
Eğitim Birimi
Mezuniyet tarihi
Lisans
Lise
Gazi Üniversitesi / Matematik Bölümü
Fatih Sultan Mehmet Süper Lisesi
2005
2001
İş Deneyimi
Yıl
Yer
Görev
2005-2007
2007-
Araştırma Görevlisi
Araştırma Görevlisi
Gazi Üniversitesi
Ahi Evran Üniversitesi
Yabancı Dil
İngilizce
Sempozyumlar
1. Karlığa, B., Mak, M., “Genelleştirilmiş Stereografik İzdüşüm ve İnversiyon”,
V. Ulusal Geometri Sempozyumu, Sakarya, 2007.
2. Yücekaya, G., K., Mak, M., “Kapalı Lorentz Küresel Eğrilerinin Alan Vektörleri
Ve Holditch Teoremi”, III. Ankara Matematik Günleri Sempozyumu, Ankara,
2008.
Hobiler
Programlama Dilleri, Voleybol, Basketbol, Yüzme