i
ENDÜSTRĠYEL UYGULAMALAR ĠÇĠN DARBE GENĠġLĠK
MODÜLASYONLU DOĞRULTUCU TASARIMI VE
GERÇEKLEġTĠRĠLMESĠ
Ali PASHAEI
YÜKSEK LĠSANS TEZĠ
ELEKTRĠK ELEKTRONĠK MÜHENDĠSLĠĞĠ
GAZĠ ÜNĠVERSĠTESĠ
FEN BĠLĠMLERĠ ENSTĠTÜSÜ
ARALIK 2013
ANKARA
ii
Ali PASHAEI tarafından hazırlanan “ENDÜSTRIYEL UYGULAMALAR ĠÇĠN
DARBE GENĠġLĠK MODÜLASYONLU DOĞRULTUCU TASARIMI VE
GERÇEKLEġTĠRĠLMESĠ” adlı bu tezin Yüksek Lisans tezi olarak uygun olduğunu
onaylarım.
Doç. Dr. M. Timur AYDEMĠR
………..……………………………….
Tez DanıĢmanı, Elektrik-Elektronik Mühendisliği Anabilim Dalı
Bu çalıĢma, jürimiz tarafından oybirliği ile Elektrik-Elektronik Mühendisliği
Anabilim Dalında Yüksek Lisans tezi olarak kabul edilmiĢtir.
Doç. Dr. Ġbrahim SEFA
………………………………………..
Elektrik-Elektronik Mühendisliği Anabilim Dalı, Gazi Üniversitesi
Doç. Dr. M. Timur AYDEMĠR
………………………………………..
Elektrik-Elektronik Mühendisliği Anabilim Dalı, Gazi Üniversitesi
Y. Doç. Dr. Gökhan ġEN
………………………………………..
Elektrik-Elektronik Mühendisliği Anabilim Dalı, Türk Hava Kurumu Üniversitesi
Tez Savunma Tarihi: 26/12/2013
Bu tez ile G.Ü. Fen Bilimleri Enstitüsü Yönetim Kurulu Yüksek Lisans derecesini
onamıĢtır.
Prof. Dr. ġeref SAĞIROĞLU
Fen Bilimleri Enstitüsü Müdürü
………………………………………….
iii
TEZ BĠLDĠRĠMĠ
Tez içindeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde
edilerek sunulduğunu, ayrıca tez yazım kurallarına uygun olarak hazırlanan bu
çalıĢmada bana ait olmayan her türlü kaynağa eksiksiz atıf yapıldığını bildiririm.
ALI PASHAEI
iv
ENDÜSTRĠYEL UYGULAMALAR ĠÇĠN DARBE GENĠġLĠK
MODÜLASYONLU DOĞRULTUCU TASARIMI VE
GERÇEKLEġTĠRĠLMESĠ
(Yüksek Lisans Tezi)
Ali PASHAEI
GAZĠ ÜNĠVERSĠTESĠ
FEN BĠLĠMLERĠ ENSTĠTÜSÜ
Aralık 2013
ÖZET
Darbe GeniĢlik Modülasyonlu (DGM) doğrultucu devreleri, klasik diyotlu ve
tristörlü doğrultucu devrelere göre daha düĢük giriĢ akım harmoniklerine ve
daha yüksek gerilim regülasyon hızına sahiptirler. Ayrıca bu doğrultucuların
giriĢ güç katsayısı ayarlanabilir ve çift yönlü güç aktarımı sağlanabilir. Bu
nedenlerden dolayı özellikle motor sürücü devrelerinin ve kesintisiz güç
kaynaklarının giriĢ katlarında DGM doğrultucuların kullanımı gittikçe
yaygınlaĢmaktadır.
Bu çalıĢmada, sanayi tipi bir kesintisiz güç kaynağının giriĢ katında
kullanılabilecek
bir
yükseltici
türden
bir
DGM
doğrultucu
devresi
incelenmiĢtir. Öncelikle DGM doğrultucu devrelerinin özellikleri ile bu
devrelerde kullanılan modülasyon teknikleri özetlenmiĢ, matematiksel modelleri
elde edilmiĢtir. Elde edilen bu model yardımıyla denetleyici tasarımı ve
benzetim çalıĢmaları yapılmıĢtır. Son olarak da 220 V DA bara gerilimine ve 70
A çıkıĢ kapasitesine sahip bir DGM doğrultucu için güç katı ve süzgeç tasarımı
yapılmıĢ, bir sanayi kuruluĢu tarafından gerçekleĢtirilen system yardımıyla da
deneysel sonuçlar alınmıĢtır.
v
Bilim Kodu
: 905.1.150
Anahtar Kelimeler : DGM Yükseltici Tip Doğrultucu, d – q Kontrol, L süzgeç
Sayfa Adedi
: 108
Tez Yöneticisi
: Doç.Dr.M.Timur AYDEMĠR
vi
DESIGN AND IMPLEMENTATION OF A PULSE WIDTH MODULATED
RECTIFIER FOR INDUSTRIAL APPLICATIONS
(M.Sc. Thesis)
Ali PASHAEI
GAZĠ UNIVERSITY
GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES
December 2013
ABSTRACT
Pulse Width Modulated (PWM) rectifiers have lower input current harmonics
and faster voltage regulation speeds compared to classical diode and thyristor
rectifiers. They also have adjustable input power factors and allow bidirectional power transfer. As a result their use has been widening especially in
the front ends of motor derives and uninterrupted power supplies (UPS).
A PWM rectifier that could be used in the front end of an industrial type UPS is
investigated in this thesis. First, properties of PWM rectifiers and modulation
techniques that are used in these converters are summarized, and mathematical
models of PWM rectifiers are given. Contoller design and simulation work have
been performed based on these models. Finally, power stage and filter design of
a boost type PWM rectifier that has 220 V DC bus voltage and 70 A output
current capacity is given. Experimental results are obtained by using a PWM
rectifier that was built by an industrial company.
Science Code
Key Words
Page Number
Supervisor
: 905.1.150
: PWM Boost Rectifier, d – q Control, L filter
: 108
: Assoc. Prof. Dr. M. Timur AYDEMĠR
vii
TEġEKKÜR
Öncelikle, Yüksek lisans eğitimim boyunca ve çalıĢmalarım sırasında bana verdiği
değerli destek ve yönlendirmelerinden dolayı sevgili hocam Doç. Dr. M. Timur
AYDEMĠR‟e sonsuz teĢekkurlerimi sunarım.
Bu güne kadar beni destekleyen ve her türlü maddi-manevi desteklerini benden
esirgemeyen ve bu yolda beni yalnız bırakmayan sevgili annem, babam ve kardeĢime
teĢekkür etmeyi bir borç bilirim ve bu calıĢmayı onlara armağan ediyorum.
Ürünleri üzerinde deney yapmama izin veren GESS/OES firmasının sahibi Sayın
Harun GÜL‟e, deneysel çalıĢmalarda ve tasarım iĢlemlerinde yardımıcı olan Hüseyin
KÖSE‟ye ve GESS/OES firmasının bütün çalıĢanlarına bu desteklerinden dolayı
teĢekkür ederim.
viii
ĠÇĠNDEKĠLER
Sayfa
ÖZET...................................................................................................................... iv
ABSTRACT .............................................................................................................v
TEġEKKÜR ........................................................................................................... vi
ĠÇĠNDEKĠLER .................................................................................................... viii
ÇĠZELGELERĠN LĠSTESĠ .................................................................................... xi
ġEKĠLLERĠN LĠSTESĠ ........................................................................................ xii
RESĠMLERĠN LĠSTESĠ ..................................................................................... xvii
SĠMGELER VE KISALTMALAR ...................................................................... xix
1. GĠRĠġ .................................................................................................................1
2. DOĞRULTUCU DEVRELER ..........................................................................3
2.1. ġebeke Kömütasyonlu Kontrolsüz Doğrultucular ......................................3
2.2. ġebeke Kömütasyonlu Kontrollü Doğrultucular ........................................4
2.3. Aktif Güç Katsayısı Düzelten Doğrultucular ..............................................6
2.3.1. Tek yönlü Yükseltici Tip Doğrultucular .........................................6
2.3.2. Çiıf yönlü Yükseltici Tip Doğrultucular .........................................7
2.3.3. Tek yönlü Alçaltıcı Tip Doğrultucular ............................................8
2.3.4. Çift yönlü Alçaltıcı Tip Doğrultucular........................................... 9
2.3.5. Tek yönlü Alçaltıcı-Yükseltici Tip Doğrultucular .........................10
2.3.6. Çift yönlü Alçaltıcı-Yükseltici Tip Doğrultucular .........................11
2.3.7. Tek yönlü Çok Seviyeli Doğrultucular ..........................................12
2.3.8. Çift yönlü Çok Seviyeli Doğrultucular ..........................................13
2.3.9. Tek yönlü Çok Darbeli Doğrultucular ...........................................14
3. DGM DOĞRULTUCUSU TEMEL TEORISI VE DARBE GENĠġLĠK
MODÜLASYON YÖNTEMLERĠ ..................................................................18
3.1. L Süzgeçli DGM Yükseltici Tip Doğrultucu ............................................20
3.2. LCL Süzgeçli DGM Yükseltici Tip Doğrultucu .......................................20
ix
3.3. DGM Yükseltici tip DoğrultucununÇalıĢması..........................................22
3.4. DGM Doğrultucu Ġçin Darbe GeniĢlik Modülasyon Teknikleri ...............28
3.4.1. Sinüsoidal darbe geniĢlik modülasyonu.........................................28
3.4.2. Uzay vektör darbe geniĢlik modülasyonu ......................................32
3.4.2.1.Uzay vektör kavramı .........................................................33
3.4.2.2.Uzay vekttör DGM prensibi ..............................................34
3.4.2.3.Uzay vektör DGM'nin uygulaması ....................................35
3.5. Ölü Zaman Etkisi.......................................................................................38
4. DGM YÜKSELTICI TIP DOĞRULTUCUNUN MATEMATIKSEL
MODELI VE DENETLEYĠCĠ TASARIMI ....................................................40
4.1. L Süzgeçli DGM Doğrultucu Matematik Modeli .....................................40
4.2. d – q Koordinatlarındaki Matematiksel Modeli ........................................48
4.3. DGM Yükseltici Tip Doğrultucunun Kontrolü.........................................51
4.4. Döner Referans Çerçevede Akım Kontrolü ..............................................55
5. GÜÇ KATININ TASARIMI ...........................................................................61
5.1. GiriĢ Endüktörünün Hesaplanması ...........................................................61
5.2. DA Bara Kapasitörünün Hesaplanması ....................................................65
5.3. Yarı Ġletken Seçimi ...................................................................................67
6. DENETĠM SĠSTEMĠNĠN TASARIMI VE BENZETĠM ÇALIġMALARI ....69
6.1. Denetleyicinin Genel Yapısı .....................................................................69
6.2. Akım Döngüsünün Tasarımı .....................................................................71
6.3. Gerilim Döngüsünün Tasarımı .................................................................72
6.4. Benzetimlerde Kullanılan Devreler ve Benzetim Sonuçları .....................73
7. DENEYSEL SONUÇLAR ..............................................................................79
7.1. Geri Besleme Devresi ...............................................................................83
7.1.1. Tam yükte çalıĢma durumu ………………………………….... ..84
7.1.2. Yarim yükte çalıĢma durumu ………………………………….....86
7.1.3. AĢırı yükte çalıĢma durumu ………………………………….......88
7.2. Geçici Olaylar ...........................................................................................90
7.3. Diğer Akım ve Gerilimler……………………………….........................92
8. SONUÇ VE ÖNERĠLER .................................................................................95
x
KAYNAKLAR ......................................................................................................96
EKLER .................................................................................................................101
EK-1 120V – 69kV‟ luk genel dağıtım sistemi için akım bozunum sınırı ..........102
EK-2 69.001 – 161kV‟ luk altdağıtım sistemi için akım bozunum sınırı............103
EK-3 Gerilim >161kV genel dağıtım sistemleri için akım bozunum sınırı ........104
EK-4 Gerilim bozunum sınırı .............................................................................105
EK-5 Mitsubishi IGBT bilgi dosyası.................................................................. 106
ÖZGEÇMĠġ .........................................................................................................108
xi
ÇĠZELGELERĠN LĠSTESĠ
Çizelge
Sayfa
Çizelge 3.1. Anahtarlama zamanı ..........................................................................38
Çizelge 6.1. DGM doğrultucunun benzetimlerdeki güç katsayısı ve akım
harmonikleri ......................................................................................78
Çizelge 7.1. Tam yük (600 F) için devre değerleri ...............................................85
Çizelge 7.2. Tam yük (300 F) için devre değerleri ...............................................85
Çizelge 7.3. Yarım yük (600 F) için devre değerleri ............................................88
Çizelge 7.4. Yarım yük için devre değerleri ..........................................................88
Çizelge 7.5. AĢırı yük için devre değerleri ............................................................91
Çizelge 7.6. AĢırı yük için çalıĢma değerleri .........................................................91
xii
ġEKĠLLERĠN LĠSTESĠ
ġekil
Sayfa
ġekil 2.1. Doğrultucuların sınıflandırılması .............................................................3
ġekil 2.2. Üç fazlı diyotlu doğrultucu ......................................................................4
ġekil 2.3. Üç fazlı tristör köprü doğrultucu (Graetz köprü) .....................................5
ġekil 2.4. α ateĢleme açısının gösterimi ...................................................................6
ġekil 2.5. Tek yönlü yükseltici tip doğrultucu topolojileri ....................................7
ġekil 2.6. Çift yönlü yükseltici tip doğrultucu topolojileri a) Dört anahtarlı b) VSI
köprü tipi c) Dört telli d) Dört ayaklı ......................................................8
ġekil 2.7. Tek yönlü alçaltıcı tip doğrultucu topolojileri a) Tek – anahtarlı b) Çift
anahtarlı c) Üç anahtarlı d) Üç fazlı CSI tipi...........................................9
ġekil 2.8. Çift yönlü alçaltıcı tip doğrultucu topolojileri a) GTO kullanan b) IGBT
kullanan c) Dört kutup...........................................................................10
ġekil 2.9. Tek yönlü alçaltıcı yükseltici tip topolojileri a) Dört anahtarlı b) SEPIC
devresinden türetilmiĢ c) Flyback devresinden türetilmiĢ d) Yalıtımlı
Cuk devresinden türetilmiĢ......................................................................11
ġekil 2.10. Matris çevirici tabanlı çift yönlü yükseltici tip doğrultucu...................12
ġekil 2.11. Tek yönlü çok seviyeli doğrultucu yapıları a) Üç anahtarlı b) Altı
anahtarlı üç seviyeli c) BeĢ seviyeli..................................................... 13
ġekil 2.12. Çift yönlü çok seviyeli doğrultucu yapıları a) Üç seviyeli kenetleme
diyotlu b) BeĢ seviyeli kenetleme diyotlu c) BeĢ seviyeli uçan
kondansatörlü....................................................................................... 14
ġekil 2.13. Tek yönlü çok darbeli çevirici yapıları a)12 darbeli b) 18 darbeli
c) 24 darbeli.......................................................................................... 15
ġekil 2.14. Çift yönlü çok darbeli çeviriciler a) 24 darbeli b) 48 darbeli............... 15
ġekil 3.1. Üç fazlı DGM yükseltici tip doğrultucu..................................................15
xiii
ġekil
Sayfa
ġekil 3.2. L süzgeçli üç fazlı DGM yükseltici tip doğrultucu ................................20
ġekil 3.3. LCL süzgeçli üç fazlı DGM yükseltici tip doğrultucu...........................21
ġekil 3.4. Geri besleme döngülü üç fazlı DGM yükseltici tip doğrultucu .............22
ġekil 3.5. DGM' nın oluĢturulması.........................................................................23
ġekil 3.6. Doğrultucunun çalıĢma bölgeleri ...........................................................24
ġekil 3.7. Üç fazlı yükselten doğrultucu çalıĢma modları .....................................25
ġekil 3.8. DGM yükseltici tip doğrultucu tek faza ait akımların akıĢ yönü ...........27
ġekil 3.9. DGM doğrultucunun çalıĢabilmesi için DA gerilim Ģartları..................28
ġekil 3.10. DGM sinyalleri uygulaması .................................................................29
ġekil 3.11. Doğal (Natural) örnekleme tekniği ......................................................31
ġekil 3.12. Düzenli (regular) Örnekleme tekniği ...................................................32
ġekil 3.13. Kompleks düzlemde dönüĢ vektörünün gösterimi ...............................34
ġekil 3.14. d-q düzleminde gerilim uzay vektörü ve bileĢenleri ............................35
ġekil 3.14. Sektör 1‟de komĢu vektörlerin bileĢimi olarak referans vektörü .........36
ġekil 3.16. Altı farklı sektörde üç faz için anahtarlama darbe modeli ...................37
ġekil 3.17. Transistör B1 ve B2 Açık / Kapalı durumları, ölü zaman Td...............39
ġekil 4.1. L süzgeçli üç fazlı DGM yükseltici tip doğrultucu................................40
ġekil 4.2. Güç anahtarı sembolleri .........................................................................41
ġekil 4.3. Faz ayağı ................................................................................................42
ġekil 4.4. Faz ayağının tek kutuplu, iki konumlu gösterilmesi ..............................42
xiv
ġekil
Sayfa
ġekil 4.5. Faz ayağının darbe geniĢliği, akım ve gerilim dalga Ģekilleri ...............43
ġekil 4.6. Tek faz ayağı ortalama modeli ...............................................................43
ġekil 4.7. Duran referans ekseninde yükseltici tip doğrultucunun ortalama modeli
................................................................................................................44
ġekil 4.8. RDS anahtarlama direnci eklenmiĢ üç fazlı DGM yükseltici tip
doğrultucu...............................................................................................45
ġekil 4.9. Üç fazlı DGM yükseltici tip doğrultucunun a – b – c koordinatlarındaki
blok diyagramı.......................................................................................47
ġekil 4.10. d – q koordinatlarında ortalama model ................................................49
ġekil 4.11. DGM doğrultucu d – q koordinatlarındaki blok diyagramı .................50
ġekil 4.12. DGM doğrultucu α – β koordinatlarındaki blok diyagramı .................50
ġekil 4.13. Koordinat sistemleri arasındaki iliĢki ..................................................51
ġekil 4.14. Üç faz DGM doğrultucu doğrudan güç kontrol yöntemi blok
diyagramı..............................................................................................52
ġekil 4.15. Üç faz DGM doğrultucu gerilim yönlendirmeli kontrol blok diyagramı
..............................................................................................................53
ġekil 4.16. Geribesleme lineerleĢtirme kontrol yönteminin blok diyagramı .........54
ġekil 4.17. Sensörsüz kontrol yönteminin blok diyagramı ....................................54
ġekil 4.18. PI-RES kontrol yönteminin blok Ģeması .............................................55
ġekil 4.19. d – q koordinatalarında akım kontrolü blok diyagramı .......................56
ġekil 4.20. GYK vector diyagramı; akım koordinat dönüĢümleri .........................58
ġekil 4.21. DGM yükseltici tip doğrultucunun dekuplajlı akım kontrolü..............60
ġekil 5.1. GiriĢ süzgeçleri a) L süzgeç, b) LC süzgeç............................................61
xv
ġekil
Sayfa
ġekil 5.2. Vektörlerin anlık konumu ......................................................................63
ġekil 5.3. DGM doğrultucu doğru çalıĢması için sınır koĢulu ...............................63
ġekil 5.4. GiriĢ akımına bağlı olarak kullanılabilecek en büyük endüktans değeri65
ġekil 5.5. Dalgalanmanın doluluk oranına göre değiĢimi ......................................66
ġekil 5.6. Sistemde kullanılan CM300DU-12F IGBT Modülü .............................68
ġekil 6.1. Üç faz DGM doğrultucu block diyagramı .............................................69
ġekil 6.2. Doğrultucu dq kapalı döngü kontrol blok Ģeması ..................................70
ġekil 6.3. d-q akım kontrol devresinin eĢdeğer kontrol blok Ģeması .....................71
ġekil 6.4. Gerilim kontrol döngüsü eĢdeğer kontrol blok Ģeması ..........................72
ġekil 6.5. DGM doğrultucunun genel görünümü ...................................................74
ġekil 6.6. DGM doğrultucu denetleyici blok diyagramı ........................................74
ġekil 6.7. DGM doğrultucunun tam yükte (3.2 Ω) çıkıĢ gerilimi ..........................75
ġekil 6.8. DGM doğrultucu tam yükte (3.2 Ω) çıkıĢ akımı ....................................75
ġekil 6.9. DGM doğrultucu devresinin yük değiĢme durumundaki genel
görünüm.................................................................................................76
ġekil 6.10. DGM doğrultucunun tam yükten yarım yüke geçiĢi............................76
ġekil 6.11. DGM doğrultucunun tam yükten %25 yüke geçiĢi (1.66 Ω) ...............77
ġekil 6.12. DGM doğrultucunun tam yükten %75 yüke geçiĢi (9.6 Ω) .................77
ġekil 6.13. DGM doğrultucu GiriĢ akım ve gerilimi .............................................78
xvi
RESĠMLERĠN LĠSTESĠ
Resim
Sayfa
Resim 7.1. IGBT doğrultucu deney devresi ...........................................................79
Resim 7.2. Yüksek frekans giriĢteki boost endüktanslar .......................................80
Resim 7.3. GiriĢteki gerilimi düĢüren trafo ...........................................................80
Resim 7.4. Devrede kullanılan hızlı sigortalar .......................................................81
Resim 7.5. Yarı iletkenlerin sıcaklık kontrolü .......................................................82
Resim 7.6. IGBT sürücü kartı ................................................................................82
Resim 7.7. Tam yükte IGBT doğrultucu çıkıĢ DA gerilimi...................................85
Resim 7.8. Maksimum boost için devrenin tepkisi ................................................85
Resim 7.9. Minimum boost için devrenin tepkisi ..................................................86
Resim 7.10. Yarım yükte maksimum boost için devrenin tepkisi .........................87
Resim 7.11. Yarım yükte minimum boost için devrenin tepkisi............................88
Resim 7.12. AĢırı yükte maksimum boost için devremin tepkisi ..........................89
Resim 7.13. AĢırı yük minimum boost için devrenin tepkisi.................................90
Resim7.14. Devrenin yüklenmesi (üst: ÇıkıĢ gerilimi, alt: GiriĢ akımı) ...............90
Resim7.15. Devrenin yüklenmesi (ayrıntılı) (üst: ÇıkıĢ gerilimi, alt: GiriĢ akımı)91
Resim 7.16. Devrenin yükünün kaldırılması (üst: ÇıkıĢ gerilimi, alt: GiriĢ akımı)91
xvii
Resim
Sayfa
Resim 7.17. Devrenin yükünün kaldırılması (ayrıntılı) (üst: ÇıkıĢ gerilimi, alt:
GiriĢ akımı)....................................................................................... 92
Resim 7.18. GiriĢ endüktörünün gerilimi (üst) ve akımı (alt) ................................92
Resim 7.19. GiriĢ endüktörünün gerilimi (üst) ve akımı (alt) (ayrıntılı) ...............93
Resim 7.20. üst: tetikleme iĢareti ve akım; alt: ayrıntılı tetikleme iĢareti ve akım93
xix
SĠMGELER VE KISALTMALAR
Bu çalıĢmada kullanılmıĢ bazı simgeler ve kısaltmalar, açıklamaları ile birlikte
aĢağıda sunulmuĢtur.
Simgeler
Açıklama
A
A katsayı matrisi
B
B katsayımatrisi
C
Kondansatörü, (F)
d
Anahtarlama fonksiyonu
D
Diyot
e
Hata değeri
f
f fonksiyonu
k
Sabit değer
L
Endüktans, (H)
r
L süzgeç bobbin katsayısı
R
Elektriksel direnç, (Ω)
S
Güç anahtarı
t
Zaman, (s)
T
Anahtarlama peryodu
U
Kontrol GiriĢ değiĢkeni
V
Gerilim değeri, (V)
X
Durum değiĢkeni
Y
Kontrol çıkıĢ değiĢkeni
Z
Katsayı matrisi, Alt indisle birlikte
empedans değeri
φ
Akım faz açısı, (Derece)
ω
Açısal frekans, (rad/s)
Δ
fark
φ
tek faz ayağı
φp
tek faz ayağı pozitif tarafı
xx
φn
tek faz ayağı negative tarafı
α
α bileĢeni
β
β bileĢeni
sw
ω ile anahtarlama frekans
Tn
Tn transistörü
park
T ile park matrisi
Mf
TaĢıyıcı oranı
ft
Tasıyıcı iĢaretin frekansı
fr
Referans iĢaretin frekansı
M
Modülasyon indeksi
Vr
Referans iĢaretin genliği
Vt
TaĢıyıcı isaretin genliği
Kısaltmalar
Açıklama
a–b–c
a – b – c koordinatı
AA
Alternatif akım
DA
Doğru akım
DGM
Darbe geniĢlik modülasyonlu
DGK
Direk güç kontrol
GYK
Gerilim yönlendirmeli kontrol
GTO
Kapıdan kapanabilir tristör
IGBT
YalıtılmıĢ kapı bipolar transistör
L
L süzgeç
LCL
LCL süzgeç
MOSFET
Metal oksit yarı iletken alan etkilitransistör
P
P tipi denetleyici
PFC
Güç factor düzeltimi
PI
PI tipi denetleyici
PLL
Faz kilit döngüsü (Phase locked loop)
SDGM
Sinüs darbe geniĢlik Modülasyonu
xx
TDB
Toplam talep bozunumu
THB
Toplam harmonic bozunumu
UPS
Kesintisiz güç kaynağı
UVM
Uzay vektör modülasyonu
VSI
Gerilim beslemeli evirici
MATLAB
Matris Lab
1
1. GĠRĠġ
AA gerilimleri DA gerilimlere dönüĢtürmek için yaygın olarak kontrolsüz (diyotlu)
veya kontrollü (tristörlü) doğrultucular kullanılır. ġebeke komütasyonlu olarak
çalıĢan bu dönüĢtürücüler basit olmakla birlikte Ģebeke üzerinde düĢük güç katsayısı
ve harmonik akımlar gibi olumsuz etkilere sahiptir.
Bu nedenlerden dolayı ülkeler ve uluslararası organizasyonlar ana Ģebekeden çekilen
akımda oluĢan harmonikleri sınırlamak için bir takım standartlar belirlemektedirler.
ġebeke
komütasyonlu
devrelerde
harmoniklerle
ilgili
standartlara
uyum
sağlayabilmek için giriĢte harmonik süzgeçler kullanmak gerekmektedir. Ancak bu
süzgeçler hem maliyeti artırmakta hem de sistemin hacmini büyütmektedir. Darbe
GeniĢlik Modülasyonlu (DGM) doğrultucu devreler, bu sorunların üzerinden
gelebilmek
için
önerilmiĢ
ve
kullanımı
yaygınlaĢmaya
baĢlamıĢtır.
Bu
doğrultucularda bir yandan DA bara gerilimi regüle edilmeye çalıĢılırken bir yandan
da giriĢ akımları, Ģebeke gerilimi ile eĢ fazlı ve sinus biçimli yapılmaya
çalıĢılmaktadır [1].
DGM doğrultucular gerilimi düĢüren veya yükselten türde olabilirler. Uygulamanın
türüne göre bu iki türden biri seçilir.
Bu çalıĢmada, sanayi tipi bir kesintisiz güç kaynağının (KGK) DA bara gerilimini
üretmek için giriĢ katında kullanılabilecek 3 fazlı DGM tekniği ile çalıĢan 15.4 kW
gücünde bir doğrultucu devre incelenmektedir. Doğrultucu çıkıĢında hedeflenen bara
gerilimi 220 VDA olduğu için, sistem giriĢinde kullanılan 3 fazlı bir transformatör ile
gerilim 100 VAA‟a düĢürülmüĢtür. Doğrultucuda anahtarlama elemanı olarak IGBT
kullanılmıĢtır.
Bu tez çalıĢmasının ikinci bölümde doğrultucularla ilgili genel bir sınıflandırma
yapılmıĢ ve doğrultucu tiplerinin Ģemaları ile birlikte avantajları ve dezavantajları
anlatılmıĢtır.
Üçüncü bölümde darbe geniĢlik modülasyonlu doğrultucunun genel Ģeması ve
çalıĢma ilkeleri anlatılmıĢtır. Bu doğrultucunun diğer doğrultuculara karĢı avantajları
2
ve dezavantajları verilmiĢ ve çalıĢmada hedeflenen L-süzgeçli yükseltici tip
doğrultucu incelenmiĢtir. Ayrıca bu bölümde darbe geniĢlik modülasyon teknikleri
ele alınmıĢtir. Sinüsoidal darbe geniĢlik yöntemi ve uzay vektör darbe geniĢlik
yöntemi (UV-DGM) karĢılaĢtırılmıĢtır.
Dördüncü bölümde darbe geniĢlik modulasyonlu IGBT doğrultucunun matematiksel
analizi yapılmıĢtır. Bu bölümde doğrultucunun matematiksel modelleri a-b-c
koordinatlarında ve d-q koordinatlarındaki incelenmiĢ ve ortalama modelleri elde
edilmiĢtir. Bu bölümde darbe geniĢlik modülasyonlu yükseltici tip doğrultucularda
kullanılan farklı kontrol yöntemlerinin karĢılaĢtırılması yapılmıĢ ve bu çalıĢmada
kullanılan döner referans ekseni tabanlı akım kontrol yöntemi üzerinde durulmuĢtur.
Bu yöntem kabaca doğrudan güç kontrolü (DGK) ve gerilim yönlendirmeli kontrol
(GYK) olmak üzere iki türde uygulanmaktadır.
BeĢinci bölümde devrede kullanılan pasif süzgecin tasarımına yönelik çalıĢmalar
verilmektedir ve devrenin güç katının tasarımı yapılmıĢtır. Ayrıca yarı iletken seçimi
de bu bölümde yapılmıĢtır.
Altıncı bölümde MATLAB/SĠMULĠNK yazılımı kullanılarak yapılan darbe geniĢlik
modülasyonlu doğrultucunun kontrolü ile ilgili benzetim çalıĢmalarının sonuçları
verilmiĢtir.
Yedinci bölümde deneysel çalıĢmanın sonuçları verilmiĢtir.
3
2. DOĞRULTUCU DEVRELER
Bü bölümde doğrultucu yapıları genel bir bakıĢla sınıflandırılmakta ve farklı
doğrultucu yapılarının avantajları ve dezavantajları incelenmetedir.
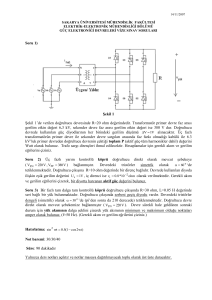
Doğrultucular, ġekil 2.1‟ de gösterildiği gibi geleneksel doğrultucular ve aktif güç
katsayısı düzelten (AGKD) doğrultucular olarak ikiye ayrılabilirler. Geleneksel
doğrultucular kendi aralarında Ģebeke komütasyonlu kontrolsüz ve Ģebeke
komütasyonlu kontrollü olarak ikiye ayrılır. AGKD doğrultucular ise tek yönlü ya da
çift yönlü çalıĢabilirler. Her iki tür AGKD dönüĢtürücü alçaltıcı tip, yükseltici tip,
alçaltıcı-yükseltici tip, çok seviyeli ve çok darbeli olmak üzere kendi içinde beĢ ayrı
kategoride sınıflandırılırlar [2, 3].
DOĞRULTUCULAR
Aktif Güç katsayısı Düzelten
Doğrultucular
Geleneksel Doğrultucular
Şebeke
Komütasyonlu
kontrolsüz
Doğrultucular
Şebeke
Komütasyonlu
Kontrollü
Doğrultucular
Yükseltici
Çift
yönlü
Tek
yönlü
Alçaltıcı
AlçaltıcıYükseltici
Çok
Seviyeli
Çok
Darbeli
Yükseltici
Alçaltıcı
Alçaltıcı
Yükseltici
Çok
Seviyeli
Çok
Darbeli
ġekil 2.1. Doğrultucuların sınıflandırılması
2.1. ġebeke Komütasyonlu Kontrolsüz Doğrultucular
ġebeke komütasyonlu kontrolsüz doğrultucular ucuz olmaları nedeniyle AA motor
sürme sistemleri ve DA servo sürme sistemleri gibi uygulamalarda kulanılırlar. Bu
uygulamaların çoğunda doğrultucular, pahalı ve hantal transformatörler olmaksızın
doğrudan Ģebeke kaynağından beslenmiĢlerdir. Ancak, bu tip doğrultucularda güç
akıĢı, sadece Ģebeke AA tarafından DA tarafına doğru olabilir.
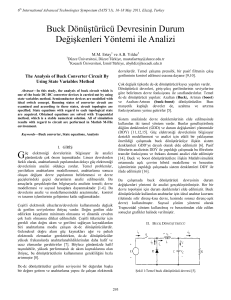
ġekil 2.2‟de üç fazlı bir doğrultucu görülmektedir. Doğrultucunun çıkıĢ doğru
geriliminin salınımsız olması için, DA tarafına süzgeç olarak büyük bir kondansatör
bağlanır. ġebeke akımı dalga Ģeklini düzeltmek için de AA tarafına, seri bir bobin
eklenir [2].
4
ġekil 2.2. Üç fazlı diyotlu doğrultucu
ġebeke akımlarının harmonikli olması, AA gerilim dalga biçiminin kalitesini önemli
ölçüde etkileyip aynı kaynağa bağlı hassas yüklerde sorun oluĢturur. Ayrıca bu
harmonikli akımlar Ģebekede ek harmonik kayıpları oluĢturup büyük gerilimlere
yolaçan elektriksel rezonansları uyarırlar, ve ek olarak devre bağlantılarının aĢırı
yüklenmesine de neden olurlar [2].
Diyotlu doğrultucular harmonik bozunumlarının yüksek, güç faktörlerinin düĢük
olması ve kontrol edilememelerinden dolayı hassas uygulamalarda tercih edilmezler.
Ancak maliyetlerinin düĢük olması nedeniyle kullanılmaya devam edilmektedirler.
Harmonik standartlarının düzenlenmesiyle kullanım alanlarının iyice kısıtlanması
kaçınılmazdır.
2.2. ġebeke Komütasyonlu Kontrollü Doğrultucular
Akü doldurma devreleri ve DA-AA motor sürme devrelerinin bir kısmında DA
geriliminin kontrol edilebilir olması gereklidir. ġebeke komütasyonlu kontrollü
çeviricilerde kullanılan tristör yardımıyla, AA‟nın kontrollü DA‟ya çevrilmesi
gerçekleĢir. Anma gerilimi ve akımı yüksek, daha iyi kontrol edilebilir anahtarların
yaygınlaĢmasıyla, tristörlü çeviricilerin kullanımı üç fazlı yüksek güçlü ve güç
akıĢının iki yönlü olması gereken uygulamalarla sınırlanır. ġebeke komütasyonlu
kontrollü doğrultucuların, üç fazlı yarım dalga doğrultucu, altı darbeli ya da çift
yıldız doğrultucu, arafaz bağlantılı çift yıldız doğrultucu, yarı kontrollü köprü
çevirici ve üç fazlı tam dalga doğrultucu ya da Graetz köprü gibi çeĢitleri vardır.
5
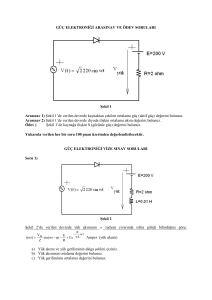
ġekil 2.3‟te en çok kullanılan Ģebeke komütasyon kontrollü doğrultucuolan üç fazlı
tam dalga doğrultucu gösterilmektedir [4].
Bu tip çeviricilerde tristörler, anot-katod gerilimi pozitif olduğunda ve kapı giriĢine
tetikleme akımı uygulandığında iletime geçerler. Diğer tristör iletime geçtiğinde ya
da akım negatif değere ulaĢmaya çalıĢtığında da kesime giderler.
ġekil 2.3. Üç fazlı tristör köprü doğrultucu (Graetz köprü)
Ayrıca
bu
doğrultucularda
Vda
gerilimi,
tristörlerin
ateĢleme
sinyalinin
ayarlanmasıyla kontrol edilir. ġekil 2.4‟da gösterildiği gibi; ateĢleme sinyali, α
açısıyla belirlenir ve 0º ve 180º arasında değiĢir. AteĢleme açısı α, kaynak
gerilimlerinin kesiĢme noktasından ölçülür. Bu noktada anot – katod tristör gerilimi
Vak pozitif olmaya baĢlar ve tristör iletime geçer. Komütasyon problemi yüzünden
gerçekte maksimum ateĢleme açısı ise 160º civarındadır [4].
ġekil 2.4. α ateĢleme açısının gösterimi
6
ġebeke komütasyonlu kontrollü çeviriciler, güç akıĢı AA‟dan DA tarafına doğru iken
doğrultma, DA‟dan AA tarafına doğru iken ise evirici olmak üzere iki bölgede
çalıĢabilirler. α açısı, 90º‟den küçükse Vda pozitif olur ve çevirici, doğrultucu olarak
çalıĢır. α açısı, 90º‟den büyük olduğunda ise Vda negatif olur ve çevirici, evirici
olarak çalıĢır. Ancak devrenin evirici olarak çalıĢabilmesi için DA tarafında bir güç
kaynağının olması gereklidir [4].
2.3. Aktif Güç Katsayısı Düzelten Doğrultucular
Aktif Güç katsayısı Düzelten (AGKD) doğrultucular tek yönlü ya da çift yönlü güç
akıĢlı, alçaltıcı, yükseltici, alçaltıcı-yükseltici, çok seviyeli ve çok darbeli olmak
üzere beĢ ayrı kategoride sınıflandırılırlar [3].
Bu tip doğrultucularda genel amaç;
Ayarlanabilir güç katsayısı
Sinüs Ģebeke akımları
Harmoniksiz Ģebeke akım ve gerilimleri
Ayarlanabilir çıkıĢ DA gerilimi
ġebekede daha düĢük elektromanyetik parazit (EMG) ve radyo frekans paraziti
(RFG) elde etmektir.
2.3.1. Tek yönlü yükseltici tip doğrultucular
Tek yönlü yükseltici tip doğrultucular, değiĢken referans ve yüklerde sabit DA çıkıĢ
gerilimi verirler. Ayrıca, güç kalitesi bakımından daha iyi performansa sahiptirler.
Bu gibi avantajları sayesinde diyotlu doğrultucular yerine kullanılmaktadırlar. ġekil
2.5‟de bu tip doğrultucuların öncü yapıları görülmektedir. 2.5 a)‟da tek anahtarlı, 2.5
b)‟de zig zag trafolu Minnesota doğrultucu, 2.5 c)‟de Vienna doğrultucu ve 2.5 d)‟de
Scott trafolu iki anahtarlı doğrultucu gösterilir. Bununla birlikte, bu grupta bulunan
diğer yapılar, tek fazlı yükseltici tip ve diğer topolojilerin kombinasyonu ile elde
edilirler. Bu tip doğrultucular, çoğunlukla güç kaynaklarında ve motor hız
kontrolünde kullanılırlar.
7
ġekil 2.5. Tek yönlü yükseltici tip doğrultucu topolojileri
a) Tek anahtarlı
b) Zig zag trafolu Minnesota doğrultucu
c) Üç anahtarlı(Vienna doğrultucu)
d) Scott bağlantı tarafolu iki anahtarlı
2.3.2. Çift yönlü yükseltici tip doğrultucular
Çift yönlü yükseltici tip doğrultucular, iki yönlü güç akıĢının gerektiği
uygulamalarda kullanılırlar. Bu uygulamalar içerisinde, kaldıraç, vinç, asansör,
batarya enerji depolama sistemleri (BESS) ve Ģebeke etkileĢimli kesintisiz güç
kaynağı (UPS) gibi uygulamalar bulunur. ġekil 2.6‟da bu çevirici yapılarının temel
devreleri gösterilir. ġekil 2.6 a)‟daki devre güç anahtarı maliyetini azaltmak için dört
anahtarlı olarak yapılır. ġekil 2.6 b)‟deki yapı bu doğrultucular içerisinde en çok
kullanılan yapıdır ve gerilim beslemeli doğrultucu (GBD) olarak bilinir. ġekil 2.6 c)
ve 2.6 d)‟de gösterilen dört – telli yapılar dengesiz kaynak gerilimlerinde de daha iyi
performans elde etmek için kullanılırlar.
8
ġekil 2.6. Çift yönlü yükseltici tip doğrultucu topolojileri
a) Dört anahtarlı
b) VSI köprü tipi
c) Dört telli
d) Dört ayaklı
2.3.3. Tek yönlü alçaltıcı tip doğrultucular
Tek yönlü alçaltıcı tip doğrultucular, tristör köprü doğrultucuda bulunan güç kalite
ve DA çıkıĢ problemlerini gidermek için kullanılırlar. ġekil 2.7‟de bu doğrultucu
yapılarına ait devre Ģemaları gösterilir. Bu yapılardaki güç anahtarlarının DGM
kontrolü, kullanılan süzgecin boyutunu düĢürür ve sistemin verimini arttırır. Ayrıca,
anahtarlama elemanlarının, akım yönüne seri bağlanması sayesinde, boĢta çektikleri
akımlar düĢük değerdedir. Buna karĢın, bu tip doğrultucular, giriĢ geriliminden
aĢağıda bir gerilim sağladıkları için süzgeç gereksinimi daha büyüktür. Bununla
birlikte, bu tip doğrultucular, batarya Ģarjı ve DA motor hız kontrolü gibi
uygulamalarda kullanılırlar.
9
ġekil 2.7. Tek yönlü alçaltıcı tip doğrultucu topolojileri
a) Tek – anahtarlı
b) Çift anahtarlı
c) Üç anahtarlı
d) Üç fazlı CSI tipi
2.3.4. Çift yönlü alçaltıcı tip doğrultucular
Çift yönlü alçaltıcı tip doğrultucular, tristör köprü doğrultucularla benzer iĢlev
sağlarlar. Ancak bu tip doğrultucuların güç kaliteleri daha iyidir ve iki yönlü güç
akıĢına da izin verirler. ġekil 2.8‟de bu tip doğrultuculardan bazıları gösterilir.
Yüksek güç uygulamalarında ġekil 2.8 a)‟da gösterilen GTO‟lu yapı, düĢük güç
uygulamalarında ise ġekil 2.8 b)‟de gösterilen IGBT‟li yapı kullanılır. ġekil 2.8
c)‟deki dört ayaklı yapı, dengesiz Ģebeke gerilimlerinde de yüksek performans
sağlanması için kullanılır.
11
ġekil 2.8. Çift yönlü alçaltıcı tip doğrultucu topolojileri
a) GTO kullanan
b) IGBT kullanan
c) Dört kutuplu
2.3.5. Tek yönlü alçaltıcı-yükseltici tip doğrultucular
Tek yönlü alçaltıcı – yükseltici tip doğrultucular; üç fazlı diyot köprü, alçaltıcı tip,
yükseltici tip ve alçaltıcı – yükseltici tip DA – DA çeviricilerin kombinasyonları ile
yapılırlar. Bu doğrultucular Ģebekeden yalıtımlı ya da yalıtımsız DA çıkıĢ
verebilirler. ġekil 2.9‟da bu doğrultucu yapılarından bazıları gösterilmektedir. ġekil
2.9 a) dört anahtarlı, b) SEPIC topolojisinden türetilmiĢ, c) Flyback topolojisinden
türetilmiĢ ve 2.9 d) Cuk topolojisinden türetilmiĢ yapılar verilmektedir. Bu
doğrultucular, pil Ģarj devreleri ve güç kaynakları gibi bir çok uygulamada
kullanılırlar.
11
ġekil 2.9. Tek yönlü alçaltıcı yükseltici tip topolojileri
a) Dört anahtarlı
b) SEPIC devresinden türetilmiĢ
c) Flyback devresinde türetilmiĢ
d) Yalıtımlı Cuk devresinden türetilmiĢ.
2.3.6. Çift yönlü alçaltıcı-yükseltici tip doğrultucular
Çift yönlü alçaltıcı – yükseltici tip doğrultucular, iki yönlü güç akıĢlı, alçaltıcı ve
yükseltici tip olarak çalıĢabilme yeteneğindedirler. Bu doğrultucular, alçaltıcı ve
yükseltici tip doğrultucuların seri bağlanmasıyla elde edilebilirler. Ancak, bu yapıyı
gerçekleĢtirmenin en kolay yolu matris dönüĢtürücünün kullanılmasıdır. ġekil
2.10‟da matris çevirici kullanılarak yapılmıĢ iki yönlü alçaltıcı – yükseltici tip
doğrultucu yapısı gösterilmektedir.
12
ġekil 2.10. Matris çevirici tabanlı çift yönlü yükseltici tip doğrultucu [52]
2.3.7. Tek yönlü çok seviyeli doğrultucular
Tek
yönlü
çok
seviyeli
doğrultucular
düĢük
anahtarlama
frekanslarında,
doğrultucunun neden olduğu, anahtarlama kayıplarını ve harmonikleri azaltmak için
kulanılırlar. Bu tip doğrultucularda, devre elemanlarındaki gerilim baskısı düĢüktür
ve çıkıĢ gerilimi giriĢ geriliminden yüksek olur. Bu özellikleri nedeniyle yüksek
gerilim ve yüksek güç uygulamalarında kullanılırlar. ġekil 2.11 a) üç anahtarlı, ġekil
2.11 b) altı anahtarlı ve ġekil 2.11 c) beĢ seviyeli yapıların gösterilmektedir.
13
ġekil 2.11. Tek yönlü çok seviyeli doğrultucu yapıları
a) Üç anahtarlı
b) Altı anahtarlı üç seviyeli
c) BeĢ seviyeli
2.3.8. Çift yönlü çok seviyeli doğrultucular
Çift yönlü çok seviyeli doğrultucular güç kalite problemlerini en aza indirmek ve
kaynak değiĢimlerinden etkilenmeyen, kalıcı durum hatası az, kontrollü DA çıkıĢ
gerilimi elde etmek için kullanılırlar. ġekil 2.12 a) ve b)‟de kenetleme diyotlu tipi,
2.12 c)‟de ise uçan kondansatörlü çok seviyeli çeviriciler gösterilmektedir. Bu
yapılarda düĢük ve orta güç uygulamalarında IGBT‟ler, yüksek güç uygulamalarında
ise GTO‟lar kullanılır. Batarya enerji depolama sistemleri, AA motor sürücüleri,
yüksek doğru gerilim iletim sistemleri (HVDC - YGDA), esnek alternatif akım iletim
(FACT - EAAĠ) sistemleri ve statik var kompanzasyon sistemleri gibi uygulamalarda
tercih edilirler.
14
ġekil 2.12. Çift yönlü çok seviyeli doğrultucu yapıları
a) Üç seviyeli kenetleme diyotlu
b) BeĢ seviyeli kenetleme diyotlu
c) BeĢ seviyeli uçan kondansatörlü
2.3.9. Tek yönlü çok darbeli doğrultucular
Tek yönlü çok darbeli doğrultucular, Ģebekedeki harmonikleri ve DA çıkıĢ
gerilimindeki salınımı azaltmak için çok darbeli diyot köprüler kullanırlar. Bu tip
doğrultucular; giriĢte kullanılan trafolar sayesinde, 12-, 18-, 24-, 30-, 36-, 48- darbeli
olarak yapılabilirler. ġekil 2.13 a) 12, b) 18, ve c) 24‟de darbeli doğrultucu yapıları
gösterilmektedir.
15
ġekil 2.13. Tek yönlü çok darbeli çevirici yapıları
a)12 darbeli
b) 18 darbeli
c) 24 darbeli
2.3.10. Çift yönlü çok darbeli doğrultucular
Çift yönlü çok darbeli doğrultucular, iki yönlü güç akıĢını sağlamak ve kontrollü DA
çıkıĢ gerilimi elde etmek için anahtarlama elemanı olarak tristör kullanılırlar.
Harmonik azaltımı ise darbelerin arttırılması ve trafoların kullanılmasıyla
gerçekleĢir. GiriĢte çok sargılı trafo, dağıtılmıĢ reaktör kullanan darbe çoklayıcı ve
injeksiyon trafosu sayesinde çok sayıda fazın kullanımı, giriĢ AA akımındaki
harmonikleri ve çıkıĢ DA gerilimindeki dalgacıkları azaltır. ġekil 2.14 a) 6- ,12- ve
24- darbeli olarak çalıĢabilen çok darbeli doğrultucuları, ġekil 2.14 b) 12- , 24- ve 48
darbeli olarak çalıĢabilen çok darbeli doğrultucuları gösterir. Bu çeviriciler yüksek
güçlü DA motor sürücülerinde, YGDA iletim sistemlerinde ve bazı güç
kaynaklarında kullanılır.
16
ġekil 2.14. Çift yönlü çok darbeli çeviriciler
a) 24 darbeli
b) 48 darbeli
Doğrultucu seçiminde dikkate alınması gereken bazı noktalar vardır [3].
GiriĢte, gerekli olan güç kalite seviyesi
ÇıkıĢ DA gerilim türü (sabit, ayarlı)
Güç akıĢı (tek yönlü, çift yönlü)
Bölge sayısı (bir, iki, ya da dört)
DA çıkıĢ yapısı (yalıtımlı, yalıtımsız)
DA çıkıĢ gereksinimi (alçaltma, yükseltme, ve alçaltma-yükseltme)
ÇıkıĢta, istenen güç kalite seviyesi (gerilim dalgacığı, çökme, ve artma)
17
DA yük tipi (lineer, nonlineer v.b.)
Maliyet, boyut, ve ağırlık
Verim
Gürültü seviyesi (EMG, RFG, v.b.)
Değer (kilowatt, megawatt, v.b.)
Güvenilirlik
Çevre (çevre ısısı, yükseklik, kirlenme seviyesi, nem, soğutma tipi, v.b.)
18
3. DGM DOĞRULTUCU TEMEL TEORĠSĠ VE DARBE GENĠġLĠK
MODÜLASYONU YÖNTEMLERĠ
Bölüm 2‟de gösterildiği gibi, diyotlu ve tristörlü dönüĢtürücüler en sık kullanılan
AA/DA dönüĢtürücülerdir. Ancak bu dönüĢtürücülerin giriĢ akımları genel olarak
uluslararası standartlarda belirtilen sınırların üzerinde harmonik içeriğe sahiptir. Bu
nedenle ya bu doğrultucularla birlikte harmonik süzgeçler ya da bu doğrultucuların
yerine harmonik içeriği düĢük akımlar çeken farklı tip doğrultucular kullanılmalıdır.
Diğer doğrultucu topolojileri arasında en çok bilinen ġekil 3.1‟de gösterilen altı
anahtarlı yükseltici tip doğrultucu topolojisidir. Bu çeviriciler iki yönde akım
akıtabilen ve tek yönde gerilim tıkayabilen, yani iki bölgede çalıĢabilen altı adet yarı
iletken anahtara ihtiyaç duyarlar. Çeviricideki bobinler yükseltme iĢlemini yapmak
için kullanılırlar. DA hat tarafındaki kondansatör ise DA gerilimindeki salınımı
azaltmaya yardımcı olur. Ayrıca bobinler ve kondansatör; yüksek frekans
anahtarlama harmoniklerini süzerken, alçak frekans AA bileĢeni dalga Ģekillerine de
biraz etkileri vardır. Bozunumsuz akım dalga Ģekilleri elde etmek için DA çıkıĢ
gerilimi Vda, faz arası AA giriĢ gerilimi tepe değerine eĢit ya da ondan daha büyük
olmalıdır. Uygulamalarda Vda AA giriĢ gerilimi tepe değerinden biraz daha büyük
seçilir.Yüksek frekanslı darbe geniĢlik modulasyön ile kontrol edilen bu tip
çeviriciler, doğrultucu olarak çalıĢmaları dıĢında evirici olarak da çalıĢabilirler [4, 5].
ġekil 3.1. Üç fazlı DGM yükseltici tip doğrultucu
19
Yükseltici tip doğrultucunun diğer doğrultuculardan daha çok tercih edilme nedenleri
Ģunlardır [4].
AA giriĢ akımları üzerindeki dalgalanma küçük olduğundan küçük EMG
süzgeçleri yeterlidir.
Güç anahtarı akımları ve dolayısıyla iletim kayıpları alçaltıcı, alçaltıcı –
yükseltici tip doğrultucu topolojilerine göre daha azdır.
Devrenin Ģebeke komütasyonlu doğrultuculara göre avantajları ise Ģunlardır [3]:
Daha az harmonik bozunumu üreterek akım ve gerilim ayarlanabilir.
Sinüs giriĢ akımları elde edilebilir.
GiriĢ güç katsayısı açısı ileri veya geri olacak biçimde kontrol edilebilir.
Doğrultucun DA barası akım veya gerilim barası olabilir.
Tristörlü doğrultucuda ters güç akıĢı DA taraftaki gerilim ters döndürülerek
gerçekleĢtirilebilir. DGM doğrultucularda ise hem gerilim hem de akım ters
döndürülebilir.
Yükseltici tip doğrultucu topolojisindeki diğer doğrultuculara göre, DGM yükseltici
tip doğrultucunun dezavantajları ve avantajları Ģunlardır [5].
Dezavantajları;
Yüksek akım oranı.
Arızalardan kolay etkilenmesi.
Yüksek anahtarlama kayıpları.
Avantajları;
Maliyetinin daha düĢük olması.
Ġki yönlü enerji akıĢı yeteneği.
21
3.1. L Süzgeçli DGM Yükseltici Tip Doğrultucu
ġekil 3.2‟de L süzgeçli üç fazlı yükseltici tip doğrultucu gösterilir. L süzgeç hat
akımı dalga Ģeklini düzeltmek ve yükseltme iĢlemini yapmak için kullanılır [2].
ġekil 3.2. L süzgeçli üç fazlı DGM yükseltici tip doğrultucu
Akım harmoniklerini anahtarlama frekansı civarına düĢürmek için yüksek değerli
giriĢ endüktörleri kullanmak gerekebilir. Yüksek değerli giriĢ bobinlerinin
kullanılması, yüksek güçlü uygulamalarda oldukça pahalı olur ve ayrıca sistemin
dinamik cevabını da zayıflatır [6]. Bu tür süzgeç kullanımının bir diğer sakıncası da
yüksek dinamik performans elde etmek ve DGM doğrultucudan kaynaklanan
harmoniklerin azaltılmasını sağlamak için yüksek anahtarlama frekanslarının
kullanılmasıdır [7].
3.2. LCL Süzgeçli DGM Yükseltici Tip Doğrultucu
ġekil 3.3‟te LCL süzgeçli yükseltici tip doğrultucu devre gösterilmektedir. LCL
süzgeç Ģebeke ve doğrultucu tarafında bulunan, seri bağlı direnç – bobinlerden ve bu
direnç – bobin gruplarına, paralel bağlı kondansatör – direnç gruplarından oluĢur.
21
ġekil 3.3. LCL süzgeçli üç fazlı DGM yükseltici tip doğrultucu
LCL süzgeç kullanımının bir takım avantajları vardır [6, 7, 8]
LCL süzgeçli yapı ile yüksek güçlerde küçük endüktans ve kapasitanslar
kullanılarak optimum sonuçlar elde edilebilir. LCL süzgeç kullanımında, L
süzgeçli yapıya kıyasla ek sensöre ihtiyaç duyulmaz.
L süzgeç ile karĢılaĢtırıldığında LCL süzgecin en önemli avantajı, düĢük
anahtarlama frekanslarında, harmonik bozunumları daha az olan Ģebeke
akımlarının elde edilebilmesidir. Anahtarlama frekansının düĢük olması,
çeviricinin verimini arttırır ve yarıiletkenlerin anahtarlamasından kaynaklanan
yüksek frekans harmonik bozunumunu azaltır.
LCL süzgeç kullanılmasıyla, DGM‟nin neden olduğu harmonikler azalır ve
yüksek dinamik performans elde edilir.
LCL süzgeç kullanımının dezavantajları Ģunlardır [7]:
Kullanılan kontrol sistemi pahalı ve karmaĢık olur.
Ölü darbe cevabını elde etmek zordur.
LCL süzgeç kullanırken süzgeç bobinleri ve kondansatörleri arasında oluĢabilecek
rezonansı önlemek için temelde iki yöntem kullanılır [8]:
Süzgeç kondansatörlerine seri bağlı dirençlerin kullanılmasıyla yapılan pasif
sönümleme.
22
Kontrol mantığında değiĢiklik yapmak suretiyle uygulanan aktif sönümleme. Pasif
sönümlemede kullanılan dirençler sisteme ek bir maliyet getirecektir. Aktif
sönümlemede ise sistemin kontrol yapısındaki karmaĢıklık artacaktır.
3.3. DGM Yükseltici Tip Doğrultucunun ÇalıĢması
DGM yükseltici tip doğrultucunun temel çalıĢma prensibi, ġekil 3.4‟te gösterildiği
gibi, geri besleme kontrol döngüsü kullanarak DA gerilimini istenilen referans
değerinde tutmaktır. Bu görevi gerçekleĢtirmek için DA tarafın Vda gerilimi C
kondansatöründen ölçülür ve Vref gerilimiyle karĢılaĢtırılır. Bu karĢılaĢtırmadan
üretilen hata sinyali, doğrultucunun altı anahtarını açıp kapamak için kullanılır. Bu
Ģekilde, güç DA gerilim ihtiyacına göre AA kaynağa gelir ya da dönebilir.
ġekil 3.4. Geri besleme döngülü üç fazlı DGM yükseltici tip doğrultucu
DGM sinyalleri ile yapılan kontrolde aktif gücün kontrolüyle birlikte reaktif güç de
kontrol edilerek güç katsayısı ayarlanır. Ayrıca, bu kontrol yöntemi Ģebekenin
harmonik bozunumunu azaltır. Bu sayede Ģebeke akım dalga Ģekillerinin sinüs
olması sağlanır [4].
DGM‟nin oluĢturulması ġekil 3.5‟te gösterildiği gibidir. DGM üretilirken kontrol
çıkıĢından Ģebeke ile aynı frekansta olan, sinüsoidal akım ya da gerilim referans
değerleri alınır. Bu referans değerleri genellikle üçgen olan taĢıyıcı sinyalle
23
karĢılaĢtırılır. Bu karĢılaĢtırma sonucunda değiĢken geniĢlikli kare dalga sinyalleri
elde edilir. Bu sinyallerin ve bu sinyallerin tümleyenlerinin anahtarlara uygulanması
ile anahtarların açılıp kapanması gerçekleĢir [9, 10].
ġekil 3.5. DGM‟ nin oluĢturulması
DGM üretilmesi için kullanılan V1,2,3 gerilimlerinin genliğinin ve Ģebekeye göre faz
farkının değiĢtirilmesiyle doğrultucunun dört bölgede çalıĢması gerçekleĢtirilir. Bu
dört bölge; ileri güç faktörlü doğrultucu, geri güç faktörlü doğrultucu, ileri güç
katsayılı evirici ve geri güç katsayılı evirici durumlarını içerir. Doğrultucunun dört
bölgede çalıĢması sırasında V1,2,3 ve Va,b,c gerilimleri arasındaki iliĢki ġekil 3.6‟daki
fazör diyagramı ile gösterilir [4].
24
ġekil 3.6. Doğrultucunun çalıĢma bölgeleri
a) Birim güç kastayılı doğrultucu çalıĢma
b) Birim güç kastayılı evirici çalıĢma
c) Kapasitif çalıĢma
d) Endüktif çalıĢma
DGM yükseltici tip doğrultucunun temel devresi IGBT‟lerden ya da yüksek güç
durumunda GTO‟lardan oluĢur. Anahtarlama durumları da ġekil 3.7‟de verilmektedir
[11].
25
ġekil 3.7. Üç fazlı yükselten doğrultucu (a), (b), (c) çalıĢma modları
26
ġekil 3.7. Üç fazlı yükselten doğrultucu (d), (e), (f) çalıĢma modları
ib akımı, yarı iletkenler üzerinden, ġekil 3.8‟de gösterilen yol üzerinde akar. Pozitif
yarı periyot boyunca, DA hattın negative tarafına bağlı olan Tn tranzistörü iletime
27
geçer ve ib akımı Tn (iTn) üzerinden akmaya baĢlar. Akım, en negatif fazla döngü
oluĢturur ve DA hattın aynı negatif ucuna bağlı diyot üzerinden geçerek kaynağa
döner ve anahtarlara geri gelir. Akım DA yüke de gidebilir (evirme) ve DA hattın
pozitif ucuna yerleĢtirilmiĢ diğer transistör üzerinden döner. Tn tranzistörü kesime
gittiğinde, akım yolu kesilmiĢtir ve akım, DA hattın pozitif ucuna bağlı Dp diyodu
üzerinden akmaya baĢlar. Üretilen id akımı, yüke paralel bağlı C kondansatörünü Ģarj
ederek doğrultucunun DA güç üretmesine izin verir. Bunun yanısıra, doğrultucunun
AA tarafında kullanılan L bobinlerinde, endüklenen gerilim sayesinde Dp diyotu
iletime geçtiği için çalıĢma boyunca L bobinlerinin önemi oldukça büyüktür. Benzer
iĢlem negatif yarı periyot boyunca da Tp ve Dn elemanları ile gerçekleĢir [4].
ġekil 3.8. DGM yükseltici tip doğrultucu tek faza ait akımların akıĢ yönü
Evirme iĢleminde, tranzistörlerden akan akımlar DA kondansatörü C‟den geldiği için
yönleri farklıdır. Çevirici doğrultma iĢlemi altında yükseltici tip çevirici, evirme
iĢleminde ise alçaltıcı tip çevirici gibi çalıĢır [4].
DGM yükseltici tip doğrultucunun, çıkıĢ DA gerilimi kontrol iĢlemini düzgünce
gerçekleĢtire bilmesi için doğrultucunun altı diyotunun negatif kutuplandırılması
gerekir. Eğer negatif kutuplandırılmazsa diyotlar iletecek ve DGM yükseltici tip
doğrultucu diyot köprü doğrultucu gibi çalıĢacaktır. ġekil 3.9‟da gösterildiği gibi,
negatif kutuplandırma iĢlemini gerçekleĢtirebilmek için kondansatör üzerindeki Vda
geriliminin, diyotlar tarafından üretilecek Vköprü geriliminden daha büyük olması
gereklidir. Böylelikle diyotlar, sadece transistörlerden en az bir tanesi iletime
geçirildiğinde ileteceklerdir. Vda geriliminin, VKöprü geriliminden daha büyük
28
olmasını sağlamak için ise DGM doğrultucunun, ġekil 3.4‟te gösterildiği gibi bir geri
besleme kontrol döngüsüne sahip olması gereklidir [4].
ġekil 3.9. DGM doğrultucunun çalıĢabilmesi için DA gerilim Ģartları
Dolayısıyla doğrultucu için çalıĢma koĢulu Ģu biçimde ifade edilir:
√ √
(
(3.1)
)
Uygulamalarda DA-bara gerilimi √
değerinden %15-20 daha büyük olmalıdır.
3.4. DGM Doğrultucu Ġçin Darbe GeniĢlik Modülasyon Teknikleri
Sinüs biçiminde bir gerilim elde etmek için en kolay ve en ekonomik yöntem, darbe
geniĢlik modülasyonu (DGM) yöntemidir. DGM yönteminde, giriĢ genliğinin sabit
tutulduğu ancak bu genliğin uygulama süresinin ya da darbe geniĢliğinin çıkıĢta
istenilen sinüsoidal iĢarete göre modüle edilerek, darbe dizisi biçimindeki iĢaretlerin
oluĢturulduğu yöntemdir. DGM dalga Ģekli farklı Ģekillerde elde edilebilir. Bunun
için çeĢitli modülasyon yöntemleri geliĢtirilmiĢtir [12].
3.4.1. Sinüsoidal darbe geniĢlik modülasyonu
Doğrultucudaki yarı iletken anahtarlama elemanlarının tetikleme anlarını belirlemek
ve eĢ zamanlamayı saglayabilmek için sinüsoidal DGM (SDGM) metodu endüstriyel
uygulamalarda çogunlukla kullanılmaktadır. ġekil 3.10‟de kontrol blok Ģemasında
gösterildigi gibi doğrultucu çıkısının gerilimini ve frekansını belirleyecek bir sinüs
referans iĢareti, frekans ve genliği sinüs iĢaretinden daha büyük bir üçgen dalga iĢaret
29
ile karĢılaĢtırılır. Bu iki iĢaretin kesiĢtiği noktalarda evirici içindeki aynı koldaki
anahtarlama elemanları durum değiĢtirirler.
ġekil 3.10. DGM sinyalleri uygulaması
Doğrultucu çıkıs gerilimi ve frekansı değerinin değiĢtirilmesi için referans iĢareti
(kontrol iĢareti) genliğinin ve frekansının değiĢtirmesi yeterli olacaktır. TaĢıyıcı
temelli DGM evirici çıkıĢ gerilimin ayarlanmasında etkin olan iki büyüklük vardır.
Bunlar modülasyon indeksi (M) ve taĢıyıcı oranı (Mf )‟dır. Bu parametreler Ģu
biçimde tanımlanır:
(3.2)
(3.3)
Burada:
ft: TaĢıyıcı iĢaretin frekansı
fr : Referans iĢaretin frekansı
Vr: Referans iĢaretin genliği
Vt: TaĢıyıcı iĢaretin genliği
Sinüsoidal DGM elde edilen çıkıĢ gerilimi ile kare dalga gerilime nazaran asenkron
motor gibi bir yükte harmoniklerin neden olduğu ısınma ve moment salınımlarından
bir ölçüde sakınılabilinir. TaĢıyıcı oranının yüksek tutulması halinde çıkıĢ
geriliminde yüksek mertebeden harmonikler oluĢur. ÇıkıĢ akımı sinüse yakın
31
olduğunda düĢük hızlarda motor milinde moment salınımı oluĢmaz, düzgün bir
dönüĢ sağlanır. TaĢıyıcı oranının küçük tutulması halinde motorun momentinde ve
hızında salınımlar oluĢur. Düsük hızlarda bir asenkron motorda düzgün bir çalıĢma
sağlanabilmesi için taĢıyıcı oranının en az 9 veya üstünde bir değer olması
gerekmektedir. Ancak doğrultucularda toplam harmonik bozunumunu azaltmak için
bir yarı periyottaki anahtarlama sayısı, kullanılan yarı iletkenlere bağlı olarak,
geçmiĢte sınırlı tutulmak zorundaydı. Çünkü makine kayıplarını azaltmakla sağlanan
verim eviricide oluĢan komutasyon kayıpları nedeniyle düĢmekteydi ve yarı
iletkenlerin kesime gitme zamanları sınırlıydı. Fakat son yıllarda geliĢtirilen
anahtarlama kayıpları düĢük ve hızları yüksek güç yarı iletken anahtarlama
elemanları sayesinde problemler büyük ölçüde ortadan kaldırılmıĢtır.
DGM anahtarlama stratejileri için iki farklı yaklaĢım söz konusudur. Bunlardan
birincisi, hem sayısal hem de analog sistemlerin uygulanmasında geniĢ Ģekilde
kullanılan doğal örnekleme tekniğidir. Sayısal veya mikroiĢlemcili uygulamalarda
kullanılan ve pek çok avantajlara sahip olan teknik ise düzenli örnekleme tekniğidir.
Doğal örnekleme tekniği çoğu analog DGM doğrultucu kontrol uygulamalarında
kullanılır. Analog elektronik malzemeler çok hızlıdır ve bu yüzden evirici
anahtarlama frekansları 10 kHz veya daha fazla seviyede kolayca elde edilebilir.
Burada, tasıyıcı üçgen dalga isaret referans iĢaret olan sinüsoidal iĢaret ile
karĢılaĢtırılır ve iki iĢaretin kesiĢtiği örnekleme noktalarında anahtarlama
elemanlarının durumları ve darbe geniĢlikleri belirlenir. Herhangi iki nokta arasında
oluĢan darbe geniĢliği ġekil 3.11‟te gösterilmiĢtir.
31
Sekil 3.11. Doğal örnekleme tekniği
Herhangi iki nokta arasında oluĢan darbe periyot oranı darbe geniĢliği değeri;
*
(
)+
(3.4)
eĢitliğinden bulunur.
Düzenli örneklenmiĢ DGM doğrultucu kontrol tekniği sayısal veya mikroiĢlemci
uygulamalarında kullanıldığı zaman bazı avantajlara sahiptir. ġekil 3.12‟te de
görüldügü gibi sinüsoidal iĢarete, taĢıyıcı iĢaretin her periyodunda bir adım yaptırılır
ve Ģekildeki gibi merdiven Ģeklinde bir iĢaret elde edilir. Daha sonra elde edilen bu
iĢaret ile tekrar üçgen dalga iĢaret karĢılaĢtırılarak anahtarlama elemanları için darbe
geniĢlikleri belirlenir. Darbe geniĢlikleri üçgen dalga iĢaretin her bir kenarı için elde
edilmiĢ olan merdiven Ģeklinde iĢareti kestiği noktalara göre simetrik düzenli
örnekleme ve asimetrik düzenli örnekleme diye ikiye ayrılır. Bu durumda darbe
geniĢliği simetrik düzenli örnekleme için;
[
];
(3.5)
32
asimetrik düzenli örnekleme için ise:
*
(
)+;
(3.6)
Biçiminde ifade edilir.
Sekil 3.12. Düzenli örnekleme tekniği
3.4.2. Uzay vektör darbe geniĢlik modülasyonu
Uzay vektör modülasyon (UVM) tekniği üç fazlı eviricilerde DGM‟ye vektörel bir
yaklaĢım olarak geliĢtirilmiĢtir. Bu yöntemle, sinüsoidal DGM‟ye göre daha düĢük
harmonik bozunum ve daha yüksek ana harmonik elde edilir. Ayrıca, anahtarlama
kayıpları da daha düĢüktür. Sayısal uygulamalar için de uygun olan bu yöntem doğal
olarak daha karmaĢıktır.
DGM
modülasyonunun
farklılığı
gösterimini temel almasından gelmektedir.
Anahtarlama anının belirlenmesi
düzleminde
gerilimin
uzay vektör
bileĢenleri dönüĢümlerle bulunur.
düzleminde anahtarlama vektörlerinin
33
gösterimini temel alan uzay vektör modülasyon tekniğinin kullanılmasıyla baĢarılır.
Uzay vektör modülasyon tekniği hesaplama yoğunluklu bir DGM tekniği olup
sürücü uygulamaları için tüm DGM teknikleri arasında en iyisidir. Üstün performans
karakteristiğinden dolayı son yıllarda yaygın olarak kullanılır.
3.4.2.1. Uzay vektör kavramı
Uzay vektör kavramı evirici çıkıĢ geriliminin modülasyonunda kullanılan AA
makinenin döner alanından türetilmistir. Bu modülasyon tekniğinde üç fazlı
nicelikler onların iki fazlı eĢdeğer niceliklerine dönüstürülebilir. Bu ya senkron
olarak döner çerçevede veya sabit çerçeve de yapılabilir. Bu 2 fazlı bileĢenden evirici
çıkıs modülünde kullanmak için referans vektör genliği bulunabilir. Döner uzay
vektörünün elde edildiği iĢlem durağan çerçeve göz önüne alınarak aĢağıdaki Ģekilde
hesaplanabilir.
Üç fazlı sinüsoidal gerilim bileĢenlerinin bulunması:
(3.7)
(
⁄ )
(
⁄ )
Üç fazlı gerilim AA makinaya uygulandığı zaman AA makinanin hava aralığında
döner akı üretir. Döner akı bileĢeni tek döner gerilim vektörü olarak ifade edilebilir.
Döner vektörün genliği ve açısı durağan referans çerçevede aĢağıda açıklandığı gibi
Clark‟ın dönüĢümleriyle bulunabilir. Kompleks düzlemde döner vektör gösterimi
ġekil 3.13‟deki gibidir. Üç faz niceligin uzay vektör gösterimi,
(
)
(3.8)
Burada
⁄
| |
√
(3.9)
34
⁄
(
⁄
)
(3.10)
EĢ. 3.10‟ün gerçek ve sanal kısımları:
(
⁄
(
[
]
⁄
⁄
[
⁄
⁄
)
⁄
⁄
⁄
(3.11)
)
(3.12)
][ ]
(3.13)
ġekil 3.13. Kompleks düzlemde dönüĢ vektörünün gösterimi
3.4.2.2. Uzay vektör DGM prensibi
Sabit frekansta sabit genlikli bir vektör gibi dönen sinüsoidal gerilim gibi
davranır.
Bu DGM tekniği (V0 – V7) 8 anahtarlama modelinin birleĢimiyle Vref referans
gerilimine yaklaĢtırır.
Koordinat dönüĢümü (durağan d-q çerçevesinden a-b-c referans Ģekline): Üç fazlı
gerilim vektörü üç fazlı gerilimin uzay vektör toplamını gösteren d – q koordinat
çerçevesinde bir vektöre dönüsür.
35
3.4.2.3. Uzay vektör DGM’in uygulamasi
Uzay vektör PWM aĢağıdaki adımlarla gerçekleĢtirilir.
Vd , Vq , Vref ve a açısı belirlenir.
T1 , T2 , T0 zaman süreleri belirlenir.
her bir IGBT‟nin anahtarlama zamanı (S1 - S6 ) belirlenir.
Koordinat dönüĢümleri: a-b-c‟den d-q‟ya dönüĢüm. d-q düzlemindeki gerilim uzay
vektörü ve bileĢenleri ġekil 3.14„deki gibi gösterilir.
Sekil 3.14. d-q düzleminde gerilim uzay vektörü ve bileĢenleri
[
|
]
[
|
√
√
][
√
]
(3.14)
(3.15)
(3.16)
Burada f1 temel frekansdır.
Vd , Vq , Vref gerilimi ve açısı yukarıdaki denklemlerin kullanılmasıyla hesaplanır.
36
Sekil 3.15. Sektör 1‟de komĢu vektörlerin bileĢimi olarak referans vektörü.
̅
(
|
|*
+
̅)
(3.17)
* +
⁄
[
⁄
]
(3.18)
Burada
Her bir sektörün anahtarlama zaman süresi:
√
|̅
|
√
|̅
|
(
(
)
(3.19)
)
(3.20)
(3.21)
Burada, n = 1 - 6 , Bu da Sektör1„den Sektör 6‟ya kadar
Her bir IGBT için anahtarlama zamanı ġekil 3.16‟de verilmistir.
37
ġekil 3.16. Altı farklı sektörde üç faz için anahtarlama darbe modeli
Her bir sektördeki üst ve alt kol IGBT‟leri için anahtarlama zamanı Çizelge 3.1‟de
gösterildigi gibidir.
38
Çizelge 3.1. Anahtarlama zamanı
Sektör
Üst Anahtarlar (S1, S3, S5)
Alt Anahtarlar (S4, S6, S2)
1
S1=T1+T2+T0/2
S3=T2+T0/2
S5=T0/2
S4=T0/2
S6=T1+T0/2
S2=T1+T2+T0/2
2
S1=T1+T0/2
S3=T1+T2+T0/2
S5=T0/2
S4=T2+T0/2
S6=T0/2
S2=T1+T2+T0/2
3
S1=T0/2
S3=T1+T2+T0/2
S5=T2+T0/2
S4=T1+T2+T0/2
S6=T0/2
S2=T1+T0/2
4
S1=T0/2
S3=T1+T0/2
S5=T1+T2+T0/2
S4=T1+T2+T0/2
S6=T2+T0/2
S2=T0/2
5
S1=T2+T0/2
S3=T0/2
S5=T1+T2+T0/2
S4=T1+T0/2
S6=T1+T2+T0/2
S2=T0/2
6
S1=T1+T2+T0/2
S3=T0/2
S5=T1+T0/2
S4=T0/2
S6=T1+T2+T0/2
S2=T2+T0/2
3.5. Ölü Zaman Etkisi
Çevirici uygulanması bahs edildiğinde, DA-link kısa devre olmasını önlemek için
DGM sinyallerine ölü zaman (gecikme) enjekte edilir. Sistem daha güvenli olur ama
performans etkilenir.
Bu kontrol kaybı geçicidir. Bu olay her anahtarlamada tekrar ve tekrar yapıldığı için
yüksek frekansta çalıĢan çeviriciler için zararlı olabilir. Bu ölü zaman etkisi olarak
adlandırılır. Ölü zaman boyunca bacaktaki iki tranzistor de durdurulmaya zorlanır.
Ölü zamanın bir diğer etkisi istenmeyen harmoniklerin ortaya çıkmasıdır. [13,14].
Ölü zaman enjeksiyon için çeĢitli stratejiler kullanabiliriz. Bir örnek ġekil 3.17‟de
gösterilmiĢtir.
39
ġekil 3.17. Transistör B1 ve B2 Açık/Kapalı durumları, ölü zaman Td
41
4.
DGM
YÜKSELTĠCĠ
TĠP
DOĞRULTUCUNUN
MATEMATĠKSEL
MODELĠ VE DENETLEYĠCĠ TASARIMI
Bu bölümde, L süzgece sahip üç fazlı yükseltici tip doğrultucunun duran ve senkron
referans eksenlerindeki matematiksel modeli gerçekleĢtirmektedir [15, 16, 17, 18,
19].
4.1. L Süzgeç Matematiksel Modeli
ġekil 4.1‟de L süzgeçli bir yükseltici tip doğrultucu görülmektedir. Bu
doğrultucunun ortalama ve genel matematiksel modelleri duran referans ekseninde
çıkarılır. Daha sonra, d – q ve α – β koordinatlarındaki modellemeleri gösterilir [17,
18, 19].
ġekil 4.1. L süzgeçli üç fazlı DGM yükseltici tip doğrultucu
Üç fazlı Ģebeke gerilimleri ve akımları Ģu biçimde tanımlansın:
(4.1)
(
)
(4.2)
(
)
(4.3)
(
(
)
(4.4)
)
(4.5)
41
(
)
(4.6)
ve hiç bir nötr bağlantısı olmadığı için:
(4.7)
Ortalama model çıkarılırken; öncelikle tek faza ait model çıkarılır ve daha sonra
diğer fazlar da eklenerek genel modele ulaĢılır.
ġekil 4.2 (a)‟daki güç anahtarı, ġekil 4.2 (c)‟deki basit sembol yardımıyla da
gösterilebilir.
ġekil 4.2. Güç anahtarı sembolleri
a) IGBT sembolü
b) akım gerilim iĢlem durumları
c) genel anahtar sembolü
S güç anahtarı açıkken, anahtar ya da paralel bağlı diyot kesimdedir ve sonuç olarak i
akımı “0” olur. S güç anahtarı kapandığında ise, anahtar ya da paralel bağlı diyot
iletime geçer ve bunun sonucunda v gerilimi “0” olur. Bu durum, altdaki eĢitlikle
ifade edilir.
{
çı
ı
(4.8)
DGM yükseltici tip doğrultucularda, bir faz ayağı ġekil 4.3‟de gösterildiği gibi iki
tane güç anahtarından oluĢur ve faz ayağının bir tarafında bobin (akım kaynağı),
diğer tarafında ise kondansatör (gerilim kaynağı) bulunur.
42
ġekil 4.3. Faz ayağı
Faz ayağındaki güç anahtarları açılıp kapanırken kondansatörün kısa devre ve
bobininde açık devre olmamasına dikkat edilmelidir. Bu durumu gerçekleĢtirmek
için ise, anahtarların aynı anda açılıp, aynı anda kapatılmamaları gerekir. Sonuç
olarak faz ayağındaki güç anahtarları birbiriyle iliĢkilidir ve bu iliĢki EĢ. 4.9 ile
belirtilir.
(4.9)
Faz ayağındaki güç anahtarları birbirleriyle iliĢkili olduğu için ġekil 4.4‟deki gibi tek
konumlu, iki kutuplu anahtar yardımıyla da gösterilebilir.
ġekil 4.4. Faz ayağının tek kutuplu, iki konumlu gösterilmesi
ġekil 4.5‟de faz ayağının darbe geniĢliği, akım ve gerilim dalga Ģekilleri ile birlikte
gösterilmektedir. Yine bu Ģekilde; T anahtarlama peryodunu, dφT‟de Sφp anahtarının
iletimde olduğu bölgeyi ifade eder.
43
ġekil 4.5. Faz ayağının darbe geniĢliği, akım ve gerilim dalga Ģekilleri
ġekil 4.5‟deki dalga Ģekillerine dayanarak, ortalama akım ve gerilim iliĢkileri EĢ.
4.10 – 4.11‟deki gibi tanımlanır.
(4.10)
(4.11)
ġekil 4.4 ve EĢ. 4.10 – 4.11‟in kullanılmasıyla tek faz ayağı ortalama modeli ġekil
4.6‟da gösterildiği gibi olur.
ġekil 4.6. Tek faz ayağı ortalama modeli
44
Üç fazlı DGM yükseltici tip doğrultucunun ortalama modeli, üç faz ayağına ait
ortalama modellerin ve diğer devre elemanlarının da birleĢtirilmesiyle, ġekil 4.7‟de
gösterildiği gibi elde edilir. Ayrıca DA tarafı pozitif ve negatif akımları, ip ve in EĢ.
4.12 – 4.13‟te tanımlanır.
(4.12)
(4.13)
ġekil 4.7. Duran referans ekseninde yükseltici tip doğrultucunun ortalama modeli
Üç faza ait ortalama matematiksel model, EĢ. 4.14 – 4.15‟deki gibi elde edilir.
[ ]
[ ]
[
[ ]
][ ]
[
]
[
]
(4.14)
(4.15)
ġekil 4.8‟de gösterildiği gibi, DGM yükseltici tip doğrultucunun anahtarlama direnci
RDS‟in de eklendiği genel matematiksel modeli EĢ. 4.16 – 4.28‟deki gibi çıkarılır.
45
ġekil 4.8. RDS anahtarlama direnci eklenmiĢ üç fazlı DGM yükseltici tip doğrultucu
ġekil 4.8‟deki devrede tek faz için EĢ. 4.16‟daki eĢitlik elde edilir.
(
açık,
)
(4.16)
kapalı iken anahtarlama fonksiyonu EĢ. 4.17 ve vDN gerilimi EĢ. 4.18‟deki
gibi olur.
́
(4.17)
(4.18)
kapalı,̅̅̅̅ açık iken ise anahtarlama fonksiyonu EĢ. 4.19 ve vDN gerilimi EĢ. 4.20‟
de gösterildiği gibi bulunur.
́
(4.19)
(4.20)
EĢ. 4.18 ve EĢ. 4.20‟deki ifadelerin, EĢ. 4.16‟da yerine yazılmasıyla EĢ. 4.21 elde
edilir.
)
[(
EĢ. 4.9‟da benzer Ģekilde,
EĢ. 4.22‟deki eĢitlik sağlanır.
ve
(
) ́
]
(4.21)
anahtarlarından sadece biri iletimde olduğundan
46
́
(4.22)
EĢ. 4.22‟deki eĢitliğin EĢ. 4.21‟de kullanılmasıyla, EĢ. 4.23 elde edilir.
[
́ )
(
]
(4.23)
RDS direnci; R içerisinde gösterildiğinde üç faza ait eĢitlikler, EĢ. 4.24 – 4.26 ile
gösterilir.
(
)
(4.24)
(
)
(4.25)
(
)
(4.26)
Üç fazlı dengeli sistemlerde akım ve gerilimler, EĢ. 4.27 – 4.28‟deki gibidir.
(4.27)
(4.28)
EĢ. 4.27 – 4.28‟deki eĢitlikler, EĢ. 4.24 – 4.26‟deki eĢitliklerin toplamında yerine
yazılarak, EĢ. 4.29‟da belirtilen
∑
değeri bulunur.
(4.29)
(4.30)
vNO değerinin, EĢ. 4.24 – 4.26‟da yerine yazılmasıyla ve EĢ. 4.30‟deki, DA tarafı
eĢitliğinin de eklenmesiyle, matematiksel model çıkarılmıĢ olur. Çıkarılan
matematiksel modelin, EĢ. 4.31‟deki formda yazılmasıyla EĢ. 4.31 – 4.36‟daki
matrisler elde edilir.
̇
(4.31)
[
]
(4.32)
47
A=
(
∑
)
(
∑
)
(
[
∑
(4.33)
)
]
]
Z=[
(4.34)
B=
(4.35)
[
]
[
]
(4.36)
Üç fazlı DGM yükseltici tip doğrultucunun a – b – c koordinatlardaki matematiksel
modeline göre blok diyagramı ġekil 4.9‟da gösterilir.
ġekil 4.9. Üç fazlı DGM yükseltici tip doğrultucunun a – b – c koordinatlarındaki
blok diyagramı
48
4.2. d – q Koordinatlarındaki Matematiksel Modeli
Denetleyici tasarımında ve iĢlemlerde kolaylık sağlayabilmek için sistem genellikle,
senkron hızda dönen d – q koordinatlarına dönüĢtürülür. Bu dönüĢüm EĢ. 4.37‟de
gösterilen Tpark (Park) dönüĢüm matrisiyle gerçekleĢtirilir.
(
⁄ )
(
√
√
[
(
⁄ )
⁄ )
(
√
⁄ )
√
(4.37)
]
EĢ. 4.38, EĢ. 4.39 - 4.41‟de gösterildiği gibi, EĢ. 4.14 – 4.15‟e uygulanır. Bu iĢlem
sonucunda,
üç
fazlı
DGM
yükseltici
tip
doğrultucunun
döner
referans
koordinatlarındaki ortalama modeli, EĢ. 4.42 – 4.43‟deki gibi elde edilir.
(4.38)
[ ]
[ ]
(4.39)
[
]
[ ]
(4.40)
[
]
[
(4.41)
[ ]
]
[ ]
[
[
][ ]
]
[
]
[
][ ]
[
]
(4.42)
(4.43)
(4.44)
(4.45)
49
(4.46)
DGM yükseltici tip doğrultucularda; z bileĢeni ”0” a eĢit olduğu için denklemlerden
çıkarılır ve d – q koordinatlarındaki ortalama modeli, EĢ. 4.47 – 4.48‟deki gibi elde
edilir.
[ ]
[ ]
[
[
]
*
+[ ]
[
][ ]
]
(4.47)
(4.48)
ġekil 4.10. d – q koordinatlarında ortalama model
Devrenin d – q koordinatlarındaki blok diyagramı ise ġekil 4.11‟de gösterildiği
gibidir.
51
ġekil 4.11. DGM doğrultucu d – q koordinatlarındaki blok diyagramı
d – q koordinatlarında ω = 0 olduğunda, devre denklemleri EĢ. 4.49 – 4.50‟
deverilen, α – β koordinatlarındaki model elde edilir.
[ ]
[ ]
[
[
]
[
]
][ ]
α – β koordinatlarındaki modele ait blok diyagram, ġekil 4.12‟de gösterilir.
ġekil 4.12. DGM doğrultucu α – β koordinatlarındaki blok diyagramı
(4.49)
(4.50)
51
Koordinat sistemleri arasındaki iliĢkiyi gösteren vektör diyagram, ġekil 4.13‟de
gösterilmiĢtir.
ġekil 4.13. Koordinat sistemleri arasındaki iliĢki
4.3. DGM Yükseltici Tip Doğrultucunun Kontrollü
Bu bölümde; literatürde DGM yükseltici tip doğrultucu için geliĢtirilen kontrol
yöntemı ve benzetimi yapılacak olan kontrol yöntemı tanımlanmıĢtır.
Duran ve senkron referans eksenindeki koordinat dönüĢümüne dayanan kontrol
yöntemlerinden biri doğrudan güç kontrol yöntemidir. Bu yöntemde, geribesleme
döngüsünden aktif güç referans değeri elde edilir. Reaktif güç referans değeri de
birim güç faktörünün elde edilebilmesi için (“0”) sıfır olarak alınır. Bu referans aktif
ve reaktif güç değerlerinin, Ģebeke aktif ve reaktif güç değerleriyle karĢılaĢtırılması
sonucu kontrol iĢlemi gerçekleĢtirilir [8, 11, 17]. Bu kontrol yönteminin blok
diyagramı ġekil 4.14‟de verilmiĢtir.
52
ġekil 4.14. Üç faz DGM doğrultucu doğrudan güç kontrol yöntemi blok diyagramı
Diğer bir yöntem, gerilim yönlendirmeli kontrolde; Ģebeke akımı, Ģebeke gerilimine
senkronlanır. Daha sonra geribesleme döngüsünden aktif akım referans değeri elde
edilir. Reaktif akım referans değeri ise birim güç faktörünün elde edilmesi için “0”‟a
ayarlanır. Referans aktif ve reaktif akım değerlerinin Ģebeke akımları ile
karĢılaĢtırılması sonucunda kontrol gerçekleĢtirilir [18, 21, 22, 23]. Ayrıca gerilim
yönlendirmeli kontrol yönteminin performansını artırmak için çapraz kuplajlı, seri ve
durum geribeslemeli dekuplaj kontrol yöntemleri uygulanır [24].
53
ġekil 4.15. Üç faz DGM doğrultucu gerilim yönlendirmeli kontrol blok diyagramı
Bir baĢka yöntem, geribesleme doğrusallaĢtırma kontrol yöntemidir. Bu da duran
referans ekseninden senkron referans eksenine dönüĢüm yapılarak uygulanır.
Kontrolde; çıkıĢ değiĢkenleri olarak; Vda gerilimi, id akımı ya da id ve iq akımları
alınır. Bu değiĢkenlere giriĢ – çıkıĢ lineerleĢtirme tekniğinin uygulanması sonucu
yeni giriĢ değiĢkenleri elde edilir. Yeni giriĢ değiĢkenlerine hata fonksiyonunun
eklenmesinden sonra SDGM anahtarlama yönteminin kullanılmasıyla kontrol
gerçekleĢtirilir [25 – 27]. Bazı kontrol yapılarında; giriĢ – çıkıĢ lineerleĢtirme sonucu
elde edilen değerlerle, Ģebeke geriliminin senkron çerçeveye dönüĢtürülmüĢ değerleri
iĢleme tabi tutulur. Bu iĢlem sonucunda bulunan değerler, UVM anahtarlama
bloğuna gönderilerek kontrol gerçekleĢtirilir [28 – 30]. Uygulanan farklı geribesleme
lineerleĢtirme kontrol yöntemlerinin yanısıra alçaltıcı tip doğrultucunun da bu
yöntemlerle kontrolü gerçekleĢtirilebilir [31–34]. Nonlineer kontrol yaklaĢımlarından
olan Lyapunov tabanlı kontrol ve kayıcı kipli kontrol genellikle UVM anahtarlama
yöntemi kullanılarak yapılır [4, 35, 36]. ġekil 4.16 geribesleme lineerleĢtirme kontrol
yönteminin blok diyagramın gösterilmiĢtir.
54
ġekil 4.16. geribesleme lineerleĢtirme kontrol yönteminin blok diyagramı
Bir baĢka kontrol yöntemi ise, sensörsüz kontroldür. Bu yöntemde çıkıĢ DA akımı ya
da hem çıkıĢ DA akımı hem de gerilimi ölçülür. Bu ölçüm ile giriĢ akım ve
gerilimleri tahmin edilmeye çalıĢılır. Bu sayede giriĢ akım ve gerilim sensörlerinin
kullanımının önlenmesiyle sistemin genel maliyeti azalır [37 – 38]. ġekil 4.17
sensörsüz kontrol yönteminin blok diyagramını göstermektedir.
ġekil 4.17. Sensörsüz kontrol yönteminin blok diyagramın
55
DGM doğrultucuların performansını arttıran kontrol yöntemleri içinde; bulanık
mantık ve yapay sinir ağlı denetleyiciler, sinirsel bulanık mantık ve adaptif bulanık
mantık denetleyiciler de kullanılır [39 – 45].
Bir baĢka kontrol yöntemi ise, PI-rezonans kontrol yöntemidir. ġekil 4.18‟de
gösterildiği gibi bu yöntem sayesinde döner çerçevesinde yapılan kontrol sayesinde
iki tane harmonik aynı anda kompanse edilebilir. Bu sayede akım harmonikleri azalır
ve birim güç katsayısı elde edilir [53].
ġekil 4.18. PI-rezonans kontrol yöntemi blok Ģeması
4.4. Döner Referans Çerçevede Akım Kontrolü
Bu çalıĢmada denetleyici tasarımı için akım kontrol yöntemi seçilmiĢtir. Döner
referans çerçevedeki akım kontrol yöntemi, üç fazlı değiĢkenlerin, dönüĢümler
sayesinde iki faz değiĢkenlere çevrilmesiyle gerçekleĢtirilir [20, 39].
56
DGK yönteminde, DA geri besleme geriliminden elde edilen aktif güç değeri,
Ģebekeden bulunan aktif güç değeriyle karĢılaĢtırılır. Reaktif güç referans değeri de
Ģebekeden elde edilen reaktif güç değeriyle karĢılaĢtırılır. Doğrultucunun
anahtarlama durumları aktif ve reaktif güç değerleri ile kontrol edilen değerler
arasındaki ani hataya dayandığı için DGM üretim bloğu yoktur. Bu nedenle, DGK
yöntemini gerçekleĢtirirken dikkat edilmesi gereken en önemli nokta, aktif ve reaktif
gücün doğru ve hızlı olarak elde edilmesidir [10, 20, 46, 47].
GYK; duran (a – b – c), α-β ve senkron dönen (d-q) referans eksenleri arasındaki
dönüĢümüne dayanan bir yöntemdir.
ġekil 4.18‟de gösterilen temel kontrol yapısında; Vda gerilimi ile Vref geriliminin
karĢılaĢtırılması sonucu elde edilen hata sinyalinden id referans akım değeri üretilir.
Bu id akımı, Ģebekeye d – q dönüĢüm uygulanması ile elde edilen id akımı ile
karĢılaĢtırılır. d – q dönüĢümden bulunan iq akımı da referans iq akımıyla
karĢılaĢtırılır. Bu karĢılaĢtırmalar sonucunda ters d – q dönüĢümü yapılır.
DönüĢümden elde edilen üç fazlı gerilim değerleri DGM bloğuna gönderilerek
anahtarlar için uygun sinyallerüretilir. d – q dönüĢümün gerçekleĢtirile bilmesi için
gereken açı değeri, Ģebeke geriliminden faz kilit döngüsü (PLL) kullanılarak elde
edilir [11, 21, 22]. PLL yerine PLL ile aynı iĢlevi yapan farklı döngülerin de
kullanılması mümkündür [47].
ġekil 4.19. d – q koordinatalarında akım kontrolü blok diyagramı
57
GYK yöntemini ġekil 4.18‟deki mantıkta bir kaç değiĢiklik yaparak da
gerçekleĢtirmek mümkündür. Ölçülen üç fazlı değerler, EĢ. 4.51 kullanılarak α-β ve
4.52 kullanılarak d – q sisteme dönüĢtürülür.
[
]
[
]
[
√
√
( )
( )
[
][
]
(
(
)
][
)
(4.51)
]
(4.52)
Denetim iĢlemleri yapıldıktan sonra çıkıĢ değiĢkenleri, EĢ. 4.53 vasıtasıyla tekrar α-β
koordinat sistemine ya da EĢ. 4.54 vasıtasıyla a – b – c koordinat sistemine
dönüĢtürülür.
[
]
[
(
(
)
)
(
[
]
[
( )
][
( )
]
(
)
)
(4.53)
(
)
(
)
(
)
(
)
[
]
(4.54)
]
Eğer PLL kullanılmamıĢsa, dönüĢümler sırasında gerekli olan açı değerleri EĢ. 4.55
ve 4.56 sayesinde bulunur.
(
(
)
√(
) (
)
√(
) (
)
)
(4.55)
(4.56)
ġekil 4.19‟de gösterildiği gibi, AA Ģebeke akım vektörü ia,b,c , iq ve id olmak üzere iki
dikdörtgen bileĢene bölünür. iq bileĢeni reaktif, id ‟ de aktif gücü tanımlar. Bu iki
akımın kontrolü sayesinde reaktif ve aktif güç bileĢenleri bağımsız olarak kontrol
edilebilir. Birim güç faktörünün elde edilmesi için ise Ģebeke akımları ia, b, c Ģebeke
gerilimleri Va, b, c ‟ye senkronlanmalıdır.
58
ġekil 4.20. GYK vektör diyagramı; akım koordinat dönüĢümleri
Sistemin d – q senkron referans çerçevedeki denklemleri EĢ. 4.57 ve 4.58‟deki
gibidir.
(4.57)
(4.58)
DA gerilim kontrolörü tarafından belirlenen id referans akımı, DA taraf ile kaynak
arasındaki güç akıĢını kontrol eder. iq referans akımı ise birim güç faktörünün elde
edilebilmesi için „0‟ a ayarlanır.
vd = vm, birim güç faktörü için vq = 0 ve R = 0 olarak verildiğinde ise denklemler, EĢ.
4.59 ve 4.60‟daki gibi olur.
(4.59)
(4.60)
akımının „0‟ a tam olarak ayarlandığının varsayılmasıyla, EĢ. 4.61 ve 4.62‟de
gösterildiği gibidir.
59
(4.61)
(4.62)
ġekil 4.20‟deki blok diyagramında akım kontrolörü olarak PI tipi kontrolör kullanılır.
Bununla birlikte, PI akım kontrolörü özellikle, EĢ. 4.63 ve 4.64‟deki gibi kuplajlı
sistemlerde hatayı yeterli derecede düzeltemez. Bu nedenle, ġekil 4.20‟ de gösterilen
dekuplajlı kontrol yapısı uygulanır [11, 24].
ġekil 4.21. DGM yükseltici tip doğrultucunun dekuplajlı akım kontrolü
(4.63)
(4.64)
EĢ. 4.65 ve 4.66‟de ifade edilen ed ve eq akım denetleyicilerinin çıkıĢıdır.
(
)
∫(
)
(4.65)
(
)
∫(
)
(4.66)
Elde edilen vd ve vq çıkıĢ değerleri, ya d-q/α-β dönüĢümü ile UVM bloğuna, ya da dq / a – b – c dönüĢümü ile SDGM bloğuna gönderilerek anahtarlar için uygun
sinyaller üretilir.
61
GYK kontrol yönteminin genel olarak iki avantajı vardır [19, 25] ;
DönüĢüm yapıldığı için değiĢkenler DA değiĢkenlerdir. Bu sayede; kalıcı durum
hatası “0” a yakındır.
DeğiĢkenler dekuplajlı oldukları için yani; hem aktif hem de reaktif bileĢene
ayrılabildikleri için her iki bileĢenin de kontrolü mümkündür.
61
5. GÜÇ KATININ TASARIMI
Bu bölümde, DGM doğrultucunun güç devresinde kullanılacak anahtarın seçimi,
giriĢte kullanılacak endüktörün ve çıkıĢta kullanılacak kondansatörün hesaplamaları
verilmektedir.
Bu tez kapsamında tasarlanacak DGM doğrultucu, sanayi tipi bir kesintisiz güç
kaynağının giriĢ katında kullanılacaktır. Bu sistemde DA bara geriliminin 220 V DA
olması istenmektedir. Hedeflenen çıkıĢ gücü de 15.4 kW‟tır. Yani, baradan çekilecek
akım 70 A olarak belirlenmiĢtir.
Bara geriliminin 220 V DA olabilmesi için sistemin giriĢinde, 380 V AA gerilimin
daha düĢük bir gerilime düĢürülmesi gerekmektedir. Bu amaçla giriĢte 380 V – 100
V üç fazlı bir transformatör kullanılmıĢtır.
Sistemin çıkıĢ gücü 15.4 kW olduğundan, %95 verim varsayımıyla giriĢ gücü 16.21
kW olarak hesaplanır. GiriĢ gerilimi 100 V olduğundan (faz-faz), güç katsayısının 1
olduğu varsayımıyla hat akımının etkin değeri Ģu biçimde hesaplanabilir:
5.1. GiriĢ Endüktörünün Hesaplanması
ġebekeye bağlı DGM doğrultucunun Ģebeke ile arasında bir süzgece ihtiyacı vardır.
GiriĢ süzgeçinin amacı, Ģebeke tarafındaki yüksek harmonikleri azaltmaktır.
En yaygın ve en basit süzgeç olarak her fazın giriĢinde seri bağlı bir adet endüktör
kullanılır (L süzgeç). Bir baĢka süzgeç türü olan LC-süzgeç ise bu endüktörlere ek
olarak üç tane de paralel kapasitör içerir. Ancak bu süzgeçlerde rezonans nedeniyle
bazı sorunlar meydana gelebilir. Rezonans frekansı kondansatör ve Ģebeke endüktans
değerlerine bağlıdır ve bu da zamanla değiĢir. Doğrultucu devrelerde yaygın olarak
kullanılan bu iki giriĢ süzgeci türü ġekil 5.1‟de gösterilmektedir.
62
ġekil 5.1. GiriĢ süzgeçleri. a) L süzgeç, b) LC süzgeç
Bu çalıĢmada süzgeç olarak yalnızca endüktör kullanılacaktır.
DGM doğrultucunun giriĢ akımının değiĢimini tanımlayan denklem senkron referans
eksen takımında EĢ. 5.1‟de gösterildiği biçimde verilebilir [11].
(5.1)
Bu eĢitlikte akım vektörünün yönü ve değiĢimi gerilim vektörleri yardımıyla
tanımlanmaktadır. DGM doğrultucunun altı aktif vektörü (
) senkron d-q
eksenlerinde saat yönünde dönerler. Gerilim vektörlerinin
olması durumlarında akımın türevini ifade eden vektörler ġekil 5.2‟de
sırasıyla
olarak gösterilmektedir. Akımın
tamamen kontrol edilebilmesi için, akım vektörünün ġekil 5.3‟te gösterilen hata
bölgesi içerisinde tutulabilmesi gerekir.
63
ġekil 5.2. Vektörlerin anlık konumu
ġekil 5.2 ve 5.3,
ve
vektörlerinin arasındaki açı
koĢulunu
sağladığında bütün vektörlerin akım vektörünü hata bölgesi içinde kalmaya
zorladığını göstermektedir.
yüksekliği
vektörleri,
olan bir eĢkenar üçgen oluĢtururlar.
ġekil 5.3. DGM doğrultucu doğru çalıĢması için sınır koĢulu
durumunda
64
Bu nedenle, trigonometrik iliĢkiler kullanılarak sınır koĢulu tanımlamak mümkündür.
|
|
√
(5.2)
ve birim güç katsayısı ile çalıĢma varsaımında
,
alınarak bara geriliminin alabileceği en düĢük gerilim için aĢağıdaki koĢul elde edilir.
√ [
(
) ],
(5.3)
EĢ. 5.3, genellikle sabit olan giriĢ gerilimi, çıkıĢ DA gerilimi, yük akımı ve
endüktans arasındaki iliĢkiyi ifade eder. Bu eĢitlik ayrıca
gerilim
düĢümünün doğrusal modülasyon bölgesinin dıĢına çıkmaması gerektiğini gösterir.
GiriĢ endüktörü çok dikkatli tasarlanmalıdır. Endüktans değerinin düĢük olması akım
dalgalanmasının artmasına ve devrenin performansının hat empedansına bağlı
olmasına neden olur. Yüksek endüktans değeri ise akım dalgalanmalarını azaltır ama
doğrultucunun çalıĢma aralığını daraltır. Endüktörün uçları arasındaki gerilim akımı
belirler. Bu gerilim de doğrultucu tarafından kontrol edilir fakat maksimum değeri
DA bara gerilimi ile sınırlandırılır. Dolayısıyla, endüktörden yüksek akım (yüksek
güç) akabilmesi için ya DA bara gerilimi yüksek olmalı ya da endüktans küçük
olmalıdır (düĢük empedans). Sonuç olarak maksimum endüktans değeri Ģu Ģekilde
belirlenebilir:
√
(5.4)
Tasarlanan sistemde Ģu parametreler kullanılmıĢtır:
Bara gerilim :
GiriĢ gerilimi:
ġebeke frekansı:
√
√
z
65
√
GiriĢ akımı:
Bu değerleri EĢ. 5.4‟te yerleĢtirirsek giriĢ endüktansın sınır değeri elde edilir.
ġekil 5.3‟te giriĢ akımına bağlı olarak kullanılabilecek en büyük endüktans değerinin
nasıl değiĢtiği gösterilmektedir..
4,5
4
3,5
L (mH)
3
2,5
2
1,5
1
0,5
0
0
50
100
150
200
250
300
350
Im (A)
ġekil 5.4. GiriĢ akımına bağlı olarak kullanılabilecek en büyük endüktans değeri
Endüktans değerinin büyümesi ile birlikte hacmininde büyğmesi, ve büyük
değerlerde bü uygulamanın dezavantajlarından dolayısıyla, Deneysel çalıĢmada
endüktas değeri 300
ve 600
olarak uygulandı.
5.2 DA Bara Kapasitörünün Hesaplanması
ÇıkıĢ gerilimi
, bara gerilimi
ve doluluk oranı d olursa:
(5.5)
Ayrıca d‟nin değeri 0 ve 1 arasında değiĢir.
66
( ⁄ )
(5.6)
⁄
(5.7)
( ) (
)
(5.8)
(5.9)
(
)) (
(
)
(5.10)
(5.11)
(
ġekil 5.4 de
)
(
)
(5.12)
‟nın d ye göre değiĢimi gösterilmektedir. Maksimum dalgalanma %50
doluluk oranında ortaya çıkmaktadır.
ġekil 5.5. Dalgalanmanın doluluk oranına göre değiĢimi
(
)
(5.13)
Yukarıda hesaplamalardan DA bara kapasitör akım dalgalanma değerini elde ettik.
ġimdi gerilim dalgalamalarını hesaplamak zorundayız.
(
⁄ )
( ⁄ )
(5.14)
(5.15)
67
(5.16)
*
(
+
(5.17)
)
(
)
(5.18)
%50 doluluk oranında maksimum tepe gerilim dalgalanmasıdır.
(
)
(5.19)
Ġfade ettiğimiz denklemleri kullanarak kapasitör değeri elde edilir. Burada kapasitör
değeri 5300 µF olarak elde edilir ama deneysel çalıĢmalarda 20000 µF olarak
kullanıldı.
5.3. Yarı Ġletken Seçimi
Etkin değeri 162.1 A, tepe değeri 229.25 A olan sinüsoidal giriĢ akımları en fazla
yarım periyot boyunca yarıiletken anahtar olarak kullanılacak IGBT‟lerden akacaktır.
Bu nedenle IGBT akımlarının etkin değerini kabaca
olacaktır. Dolayısıyla IGBT akımının etkin değeri 81.05 A‟den küçük olacaktır.
Anlık olarak anahtardan akacak en büyük akım da 229.25 A‟dir.
Anahtarların görecekleri en büyük gerilim ise çıkıĢ bara gerilimi, yani 220 V
olacaktır. Bu durumda 600 V, 300 A değerlerine sahip bir IGBT bu devrede
kullanılabilir.
Deneysel
sonuçların
alındığı
devrede
Mitsubishi
firmasının
CM300DU-12F kodlu, 600 V besleme gerilimi altında, 300 A akımı anahtarlayabilen
modülü kullanılmıĢtır.
Modülde iki tane IGBT bulunmaktadır. Bu modülün fotoğrafı ġekil 5.6‟te
görülmektedir.
68
ġekil 5.6. Sistemde kullanılan CM300DU-12F IGBT Modülü
69
6. DENETĠM SĠSTEMĠNĠN TASARIMI VE BENZETĠM ÇALIġMALARI
Bu bölümde, DGM doğrultucu modeli kullanılarak denetleyici tasarımı yapılacak ve
sistemin
MATLAB
ile
gerçekleĢtirilen
benzetim
çalıĢmaları
verilecektir.
Benzetimlerde SĠMULĠNK araç kutusundan IGBT köprü, PI denetleyici, dq0 – abc
ve abc – dq0 dönüĢüm blokları kullanılmıĢtır. Ayrık zamanlı olarak yapılan
çalıĢmalarda Ts = 50 µs örnekleme zamanı seçilmiĢtir. Ayrıca, harmonik analizini
yapabilmek için “FFT (hızlı Fourier dönüĢümü) analiz aracı” kullanılmıĢtır.
Benzetimlerde üç faz Ģebeke ile DGM doğrultucu arasına üç fazlı bir 380 / 100 V
transformatör yerleĢtirilmiĢtir. Benzetimi yapılan sistemin genel yapısı ġekil 6.1‟de
verilmektedir.
ġekil 6.1. Üç faz DGM doğrultucu block diyagramı
DGM doğrultucu devresinde anahtarlama yöntemi olarak Sinüsoidal DGM
kullanılmıĢtır. Bu amaçla, referans sinüsler testere diĢi gerilimlerle karĢılaĢtırılarak
anahtarlama iĢaretleri üretilmiĢtir.
6.1. Denetleyicinin Genel Yapısı
DGM doğrultucunun çalıĢmasını modellemel için kullanılan ve senkron referans
ekseninde ifade edilen denklemler EĢ. 6.1‟de verilmektedir.
(6.1)
{
(
)
71
Ayrıca:
(6.2)
Görüldüğü gibi d ve q ekseni akımlarına ait denklemler arasında bir bağlaĢım
bulunmaktadır. Bu bağlaĢımı ortadan kaldırıp denetleyici yapısını basitleĢtirecek bir
tekniğe ihtiyaç bulunmaktadır. Bu amaçla, gerilim komutları EĢ. 6.6‟da gösterilen
biçimde ifade edilebilir.
{
(6.3)
EĢ. 6.3 kullanılarak EĢ. 6.1 yeniden yazılabilir:
{
(6.4)
Bu dönüĢüm ve denklemler kullanılarak oluĢturulan kapalı çevrim denetim sistemi
ġekil 6.2‟de gösterilmiĢtir.
ġekil 6.2. Doğrultucu d-q kapalı döngü kontrol blok Ģeması
Gerilim geribesleme döngüsünde, bara gerilimi için tanımlanan referans gerilimi ile
gerçek bara gerilimi karĢılaĢtırılarak gerilim hatası üretilir. Bir PI denetleyici bu hata
iĢaretinden d ekseni akımı için referansı üretir.
(
)(
)
(6.4)
71
Bu referans değeri,
ile karĢılaĢtırılır. Hata iĢaretinden, ikinci bir PI denetleyici
kullanılarak bir gerilim iĢareti üretilir (
(
)(
).
)
(6.5)
Akımın q bileĢeni, güç katsayısının değerini belirler. Birim güç katsayısı için
alınmalıdır. Akım döngüsünün bu bölümünde, q bileĢeni için tanımlanan referans
değeri ile akımın q bileĢeni karĢılaĢtırılır ve elde edilen hata iĢareti, bir baĢka PI
denetleyici kullanılarak gerilimin q bileĢeni elde edilir (
(
)(
).
)
(6.6)
Tüm bileĢenler bir araya getirildiğinde gerilimin d ve q bileĢenleri Ģu biçimde ifade
edilir:
(
)(
)
(6.7)
(
)(
)
(6.8)
6.2. Akım Döngüsünün Tasarımı
Akım döngüsünün doğrusal bölgede kaldığı, yani doymaya girilmediği ve bileĢenler
arasındaki etkileĢimin tamamen yok edildiği varsayımıyla d ekseni akım döngüsü
ġekil 6.3‟te gösterildiği gibi yeniden çizilebilir.
ġekil 6.3. d-q akım kontrol devresinin eĢdeğer kontrol blok Ģeması
72
Akım döngüsünün hızının yüksek olması için 1. Tip akım regülatörü kullanılabilir.
Kutup-sıfır iptali için
alınabilir. Açık döngü akım transfer fonksiyonu EĢ.
6.9‟da ifade edilmiĢtir.
( )
(
)
(6.9)
Tip 1 regülatör için parametre ayarlama yöntemine göre sönüm oranı
olursa:
(6.10)
PI kontrolörünün parametreleri alttaki Ģekilde seçilmelidir:
(6.11)
(6.12)
6.3. Gerilim Döngüsünün Tasarımı
Gerilim döngüsü ġekil 6.4‟te verilmektedir.
ġekil 6.4. Gerilim kontrol döngüsü eĢdeğer kontrol blok Ģeması
Gerilim regülatörü transfer fonksiyonu Ģu biçimde tanımlanabilir:
( )
(6.13)
73
Burada:
(6.10)
ġekil 6.4‟ten açık döngü transfer fonksiyonu Ģu biçimde ifade edilebilir:
(
(
)
(6.11)
)
Gerilim döngüsünün en önemli amacı çıkıĢtaki gerimi kararlı tutmaktır. Bu nedenle
Tip 2 regülatör yapısı kullanılabilir. Tip 2 regülatör için Ģu bağıntı yazılabilir:
(6.12)
Burada
(6.13)
olup,
gerilim döngüsünün bant geniĢliğini belirler.
seçilirse sonuç Ģu
biçimde elde edilir.
{
(6.14)
6.4. Benzetimlerde Kullanılan Devreler ve Benzetim Sonuçları
Yükseltici tip DGM doğrultucu devrenin benzetimleri MATLAB/SĠMULĠNK
yazılımı
kullanılarak
yapılmıĢtır.
ġekil
6.5‟de
devrenin
genel
görünümü
gösterilmektedir. ġekil 6.6‟da devrenin kontrolü için kullanılan denetleyici
görünümü gösterilmektedir. Denetleyici blok diyagramında iki tane kontrol döngüsü
uygulanmaktadır. Birinci döngüde (gerilim döngüsü), çıkıĢ gerilimini, istediğimiz
değerde sabit tutmak için referans değeri ile karĢılaĢtırılıyor ve üretilen hata sinyali,
PI regülatörü vasıtasıyla, DGM darbelerini hata sinyaline göre ayarlamaktadır. Ġkinci
döngüde(akım döngü) ise, birim güç katsayısı elde etmek için referans bir akım
74
değeri ile karĢılaĢtırılıyor. Birim güç katsayısı elde etmek için referans akım değeri
“0” olarak ayarlanır.
ġekil 6.5. DGM doğrultucunun genel görünümü
ġekil 6.6. DGM doğrultucu denetleyici blok diyagramı
ġekil 6.7‟de DGM doğrultucunun tam yükte (3.2 Ω) çıkıĢ gerilimi gösterilmektedir.
ġekil 6.8‟de devrenin tam yükteki çıkıĢ akımı gösterilmektedir.
75
ġekil 6.7. DGM doğrultucunun tam yükte (3.2 Ω) çıkıĢ gerilimi
ġekil 6.8. DGM doğrultucu tam yükte (3.2 Ω) çıkıĢ akımı
ġekil 6.9‟da devrenin yük değiĢme durumunda genel görünümü gösterilmektedir.
ġekil 6.10‟da DGM doğrultucunun, yarım yükteki çıkıĢ gerilim ve akımını
görebiliyoruz. Bu durumda devre tam yükte çalıĢırken (3.2 Ω), yük iki katına çıkıyor
(6.4 Ω). Yükün değiĢme anında, çıkıĢ geriliminde bir yükselme meydana gelmekte
ve denetleyici gerilimi referans değerine döndürmektedir.
Tam yükten %75 yüke ve %25 yüke geçiĢlerdeki tepkiler ġekil 6.11‟de ve ġekil
6.12‟de verilmektedir.
ġekil 6.13‟de giriĢ akımı ve gerilimi bir periyot boyunca gösterilmektedir.
verilmektedir. Görüldüğü gibi, akımla gerilim aynı fazdadır.
76
ġekil 6.9. DGM doğrultucu devresinin yük değiĢme durumundaki genel görünüm
ġekil 6.10. DGM doğrultucunun tam yükten yarım yüke geçiĢi
77
ġekil 6.11. DGM doğrultucunun tam yükten %25 yüke geçiĢi (12.8 Ω)
ġekil 6.12. DGM doğrultucunun tam yükten %75 yüke geçiĢi (2.4 Ω)
78
ġekil 6.13. DGM doğrultucu giriĢ akım ve gerilimi
DGM doğrultucunun çeĢitli yüklerdeki güç katsayı değeri ve total harmonik
bozunumu çizelge 6.1‟de gösterilmektedir.
Çizelge 6.1. DGM doğrultucunun benzetimlerdeki güç katsayısı ve akım
harmonikleri (Benzetim sonuçları)
YÜK
%25
%50
%75
%100
THB (%)
17
6
3
2.7
GK
0.98
0.99
0.99
0.99
Çizelgeden görüldüğü gibi düĢük yüklerde THB değeri kötüleĢmektedir. Uygun
ednüktör seçimi ile THB değerinin kabul edilebilir olduğu çalıĢma bölgesi
geniĢletilebilir.
Bölüm 7‟de benzetimleri yapılan devreler, uygulamalı olarak yapılmıĢtır.
79
7. DENEYSEL SONUÇLAR
Bu bölümde 220 V, 70 A çıkıĢ değerleri olan DGM doğrultucu devre ile ilgili
deneysel sonuçlar verilmektedir. Sonuçlar, GESS OES firması tarafından geliĢtirilen
doğrultucu devre üzerinde yapılan testlerden alınmıĢ olup, yapılan teorik
hesaplamaların ve benzetim çalıĢmalarının doğruluğunu göstermek amacıyla teze
dâhil edilmiĢtir.
Uygulama yapılan devre 220V, 15.4 kW gücünde bir 3-fazlı yükseltici tip IGBT
doğrultucu devresidir. Sistem 380 V AA gerilim ile beslenmektedir. IGBT
doğrultucu yükseltici tip olduğu için 3 faz bir trafo ile giriĢ gerilimi 100 V‟a
düĢürülmüĢtür. Resim 7.1‟de 3 faz IGBT doğrultucu devresi gösterilmektedir.
Resim 7.1. IGBT doğrultucu deney devresi
GiriĢte tarafında 3-fazlı bir varyak kullanılmıĢtir. GiriĢ gerilimi bu varyak ile
değiĢtirilerek sistemin anma geriliminin altında ve üstünde nasıl davrandığı
gözlemlenmiĢtir. Süzgeç endüktörleri bu varyakla doğrultucu arasına bağlanmıĢtır.
GiriĢ tarafındaki endüktanslar iki önemli iĢlem için kullanılırlar. Hem giriĢ
81
tarafındaki akımları sinüsoidal yapmak için ve hem de boost iĢlemini yapmak için
devrenin en önemli kısımlarıdırlar. Resim 7.2‟de boost endüktanslar verilmiĢtir.
Resim 7.2. Yüksek frekans giriĢteki boost endüktanslar
Resim 7.3. GiriĢteki gerilim düĢüren trafo
81
IGBT doğrultucunun giriĢinde hızlı sigortalar vardır. Hızlı sigortalar aĢırı akım, kısa
devre gibi durumlarda devrenin hızlı bir Ģekilde açılmasını sağlar, yangın çıkmasını
vb durumları engeller. Yani güvenlik amaçlıdır. Resim 7.4‟te hızlı sigortalar
verilmiĢtir.
Resim 7.4. Devrede kullanılan hızlı sigortalar
IGBT köprü devresi için 3 adet sırt-sırta IGBT mödül kullanılmıĢtır. Ayrıca sistemin
yarı iletkenlerin sıcaklığını kontrol etmek için soğutucu ve AA fan kullanılmıĢtır.
Uygulama aĢamasında yarı iletkenlerin sıcaklığı sürekli olarak kontrol edilmektedir.
Resim 7.5‟te bu iĢlem gösterilmiĢtir.
Elektronik kartlarının ve sürücü kartların DA beslemesi için ayrıca bir AA kaynak ve
DA-DA konverter kullanılmıĢtir. Bir çevirici devre çıkıĢında 4 adet +16V DA
besleme (izole) vardır. Bu beslemelerin 3 tanesi sürücü kartları için 1 tanesi ise
kontrol kartı için kullanılmıĢtır.
IGBT anahtarlama frekansı 20 kHz‟dir. Hem sinyalı akım gerilim yönünden
kuvvetlendirmek için hem de optokuplerle tam bir yalıtım sağlamak için bir sürücü
kartı kullanılmıĢtır. Bu sayede güç katında yüksek frekans yüzünden oluĢan parazit
ve gürültüler elektronik kontrol kartlarına yansımaz. Resim 7.6‟da IGBT sürücü kartı
gösterilmiĢtir.
82
Resim 7.5. yarı iletkenlerin sıcaklık kontrolü
Resim 7.6. IGBT sürücü kartı
83
7.1. Geri Besleme Devresi
Geri besleme devresi için iki tane kontrol aynı anda yapılmaktadır.
1- ÇıkıĢ DA gerilim geri besleme
2- Güç katsayısını
yapmak için giriĢ akımından geri besleme
ÇıkıĢ DA gerilim 220 V olacağı için çıkıĢtan alınan bir izleme devresi ile 220V
kapalı çevrim kontrol sürekli olarak yapılmaktadır. ÇıkıĢ DA gerilime göre DGM
sinyallerinin katsayı çarpanı sinüsoidal biçimde artırılır veya azaltır. Bu iĢlemi dspic
(micrichip) mikroiĢlemcisi yapar.
dspic içerisinde DGM sinyallerinin tablosu kayıtlıdır. Yani hangi zaman aralığında
hangi DGM doluluk oranının kullanılacağı bellidir. Fakat bu değerler 1 pu
değerleridir. ÇıkıĢ geribesleme devresi yükün durumuna ve giriĢ gerilimi seviyesine
bağlı olarak çıkıĢ DA gerilimini (Vda) sabit tutmak için bu DGM tablosunu 0-1 pu
arasında uygun bir Ģekilde kullanır.
Bu iĢlemi mikroiĢlemci çok daha kısa Ģekillerde gerçekleĢtirir. GiriĢ gerilimi ve yük
yüzdesi çıkıĢ DA gerilim seviyesini öncelikli olarak etkiler.
Ġkinci denetim döngüsünde IGBT doğrultucunun
değeri ayarlanır. Akım
referansının açısı istenen değere ayarlanarak giriĢ gerilimi ile akımı arasındaki faz
farkı kontrol edilebilir. Böylece bir yandan düĢük harmonikli giriĢ akımları elde
ederken bir yandan da çift yönlü güç akıĢı sağlamak mümkündür.
GeliĢtirilen 3-fazlı IGBT doğrultucunun nasıl çalıĢtığını görmek için devre 3 farklı
modda çalıĢtırıldı.
- Tam yük
- Yarım yük
- AĢırı yük
Elde edilen sonuçlar aĢağıda grafikler ve resimlerle verilmiĢtir. Bu sonuçlar
incelendiğinde teorik hesaplamalar ve benzetim değerlerine çok yakın sonuç elde
84
edildiği görülmektedir. Ayrıca devre iki farklı giriĢ endüktans değeri ile
çalıĢtırılmıĢtır. Hem 300 µF ve hem 600 µF için yukarıda söz edilen üç modda
deneme yapılmıĢtır.
7.1.1. Tam yükte çalıĢma durumu
a) 600 µH ile çalıĢma durumları
GiriĢte 600 µH değerinde bir endüktör kullanıldığında elde edilen sonuçlar Çizelge
7.1‟de verilmektedir. Ölçümler anma geriliminin altında ve üzerinde iki farklı
gerilimde yapılmıĢtır. Her iki durumda da Toplam Harmonik Bozunum (THB)
değerinin %5 seviyesinin altında kaldığı, güç katsayısının da 0.99-1 arasında olduğu
gözlemlenmiĢtir.
Çizelge 7.1. Tam Yük (600 µH) için devre değerleri
TAM YÜK
V
THB
PF
GiriĢ gerilimi (maksimum boost)
185
%3
1
GiriĢ gerilimi (minimum boost)
235
%5
0.99
b) 300 µH boost için çalıĢma durumları
GiriĢte 300 µH değerinde bir endüktör kullanıldığında elde edilen sonuçlar Çizelge
7.2‟de verilmektedir. Ölçümler anma geriliminin altında ve üzerinde iki farklı
gerilimde yapılmıĢtır. Endüktans değeri azaldığında THB değerinin kötüleĢtiği,
özellikle yüksek gerilim değerinde sınır dıĢına taĢtığı, güç katsayısının da bir miktar
kötüleĢtiği gözlemlenmiĢtir.
85
Çizelge 7.2. Tam Yük (300µF) için devre değerleri
TAM YÜK
V
THB
PF
GiriĢ gerilim (maksimum boost)
185
%3.5
0.99
GiriĢ gerilim (minimum boost)
235
%9
0.995
Resim 7.7-7.9 arasında IGBT doğrultucunun 600 µH endüktans değeri ile elde edilen
bazı sonuçlar verilmektedir.
Resim 7.7‟de tam yükte çalıĢma sırasında çıkıĢ gerilimi gösterilmektedir. ġekil 7.8
ve 7.9‟da, düĢük ve yüksek giriĢ gerilimleri için giriĢ akımı ve gerilimi
gösterilmektedir. Her iki durumda da giriĢ gerilimi ile akımının aynı fazda olduğu,
akımın sinüsoidal olduğu görülmektedir.
Resim 7.7. Tam yükte IGBT doğrultucu çıkıĢ DA gerilimi
86
Resim 7.8. Maksimum boost için devrenin tepkisi
Resim 7.9. Minimum boost için devrenin tepkisi
7.1.2. Yarım yükte çalıĢma durumu
a) 600 µH boost için çalıĢma değerleri
GiriĢte 600 µH değerinde bir endüktör kullanıldığında yarım yükte elde edilen
sonuçlar Çizelge 7.3‟te verilmektedir. Ölçümler anma geriliminin altında ve üzerinde
87
iki farklı gerilimde yapılmıĢtır. Her iki durumda da THB değerinin %5 seviyesinin
üzerinde olduğu, güç katsayısının da 0.97-0.99 arasında olduğu gözlemlenmiĢtir.
Çizelge 7.3. Yarım Yük (600 µH) için devre değerleri
YARIM YÜK
V
THB
PF
GiriĢ gerilimi (maksimum boost)
185
%9
0.99
GiriĢ gerilimi (minimum boost)
235
%17
0.97
b) 300 µH için çalıĢma durumları
GiriĢte 300 µH değerinde bir endüktör kullanıldığında yarım yükte elde edilen
sonuçlar Çizelge 7.4‟te verilmektedir. Ölçümler anma geriliminin altında ve üzerinde
iki farklı gerilimde yapılmıĢtır. Her iki durumda da THB değerinin %15 seviyesinin
üzerinde olduğu, güç katsayısının da 0.94-0.97 arasında olduğu, sistem davranıĢının
ciddi biçimde bozulduğu gözlemlenmiĢtir.
Çizelge 7.4. Yarım Yük için devre değerleri
YARIM YÜK
V
THB
PF
GiriĢ gerilim (maksimum boost)
185
16%
0.97
GiriĢ gerilim (minimum boost)
235
20%
0.94
Çizelgelerden de görüldüğü gibi, endüktans değerinin küçük olması hem güç
katsayısının düĢmesine hem de harmoniklerin büyümesine yol açmaktadır. Bu
nedenle daha geniĢ bir yük aralığında THB değerinin sınırlar içerisinde kalabilmesi
için daha büyük bir endüktans değerine gereksinim vardır.
Resim 7.10-11‟de yarım yükte çalıĢma ile ilgili akım ve gerilimler gösterilmektedir.
88
Resim 7.10. Yarım yük maksimum boost için devrenin tepkisi
Resim 7.11. Yarım yükte minimum boost için devrenin tepkisi
7.1.3. AĢırı yükte çalıĢma durumu
a) 600 µH boost endüktansı için calıĢma
GiriĢte 600 µH değerinde bir endüktör kullanıldığında 150 A yükte elde edilen
sonuçlar Çizelge 7.5‟te verilmektedir. Ölçümler anma geriliminin altında ve üzerinde
89
iki farklı gerilimde yapılmıĢtır. Her iki durumda da THB değerinin %5 seviyesinin
altında olduğu, güç katsayısının da 0.99-1.00 arasında olduğu gözlemlenmiĢtir.
Çizelge 7.5. AĢırı Yük için devre değerleri
AġIRI YÜK
V
THB
PF
GiriĢ gerilim (maksimum boost)
185
%4
0.99
GiriĢ gerilim (minimum boost)
235
%2.5
1
b) 300 µH boost endüktansı için calıĢma
GiriĢte 300 µH değerinde bir endüktör kullanıldığında aĢırı yükte elde edilen
sonuçlar Çizelge 7.6‟da verilmektedir. Ölçümler anma geriliminin altında ve
üzerinde iki farklı gerilimde yapılmıĢtır. Her iki durumda da THB değerinin %5
seviyesinin altında olduğu, güç katsayısının da 0.99-1.00 arasında olduğu
gözlemlenmiĢtir.
Çizelge 7.6. AĢırı Yük için çalıĢma değerleri
AġIRI YÜK
V
THB
PF
GiriĢ gerilim (maksimum boost)
185
3%
1
GiriĢ gerilim (minimum boost)
235
5%
0.99
Akım büyüdüğü için her iki endüktans değerinde de THB değerinin sınırlar içinde
kaldığı, güç katsayısının da istenilen değerde tutulabildiği görülmektedir.
Resim 7.12-7.13‟te deneysel sonuçlar verilmektedir.
91
Resim 7.12. AĢırı yükte maksimum boost için devremin tepkisi
Resim 7.13. AĢırı yük minimum boost için devrenin tepkisi
7.2. Geçici Olaylar
Bu kısımda devrenin yüklenmesi ve yükünün kaldırılması sırasında yaĢanan geçici
olaylar gösterilmektedir.
91
Resim 7.14. Devrenin yüklenmesi (üst: ÇıkıĢ gerilimi, alt: GiriĢ akımı)
Resim 7.15. Devrenin yüklenmesi (ayrıntılı) (üst: ÇıkıĢ gerilimi, alt: GiriĢ akımı)
92
Resim 7.16. Devrenin yükünün kaldırılması (üst: ÇıkıĢ gerilimi, alt: GiriĢ akımı)
Resim 7.17. Devrenin yükünün kaldırılması (ayrıntılı) (üst: ÇıkıĢ gerilimi, alt: GiriĢ
akımı)
7.3. Diğer Akım ve Gerilimler
Bu bölümde devre üzerinde çeĢitli noktalardan alınan diğer akım ve gerilim Ģekilleri
veirlmektedir. Resim 7.18‟de giriĢ endüktörünün gerilimi ve akımı gösterilmektedir.
93
Resim 7.18. GiriĢ endüktörünün gerilimi (üst) ve akımı (alt)
Resim 7.19. GiriĢ endüktörünün gerilimi (üst) ve akımı (alt) (ayrıntılı)
94
Resim 7.20. GiriĢ gerilimin üst: tetikleme iĢareti ve akım; alt: ayrıntılı tetikleme
iĢareti ve akım
95
8. SONUÇ VE ÖNERĠLER
Darbe GeniĢlik Modülasyonlu (DGM) doğrultucular ayarlanabilir güç katsayıları ve
düĢük harmonik yüzdeleri nedeniyle pek çok uygulamada tercih edilmektedirler. Bu
çalıĢmada, sanayi tipi kesintisiz güç kaynaklarının giriĢ katında kullanılabilecek
yükselten tür bir DGM doğrultucu devresi incelenmiĢ, çıkıĢ gerilimi 220 VDA, 70 A
olan bir doğrultucu için güç devresi ve denetleyici tasarımları yapılmıĢ, bununla ilgili
benzetim
çalıĢmaları
gerçekleĢtirilmiĢtir.
Yapılan
çalıĢmaların
doğruluğunu
göstermek için bir sanayi kuruluĢunun gerçekleĢtirdiği devre üzerinde deneyler
yapılmıĢ ve sonuçlar alınmıĢtır.
Bu çalıĢma kapsamında yalnızca sinüsoidal DGM tekniği kullanılmıĢ, iki farklı giriĢ
endüktansı değeri için deneysel sonuçlar alınmıĢtır. Elde edilen sonuçlar, hafif
yüklerde THB ve güç katsayısı değerlerinin kötüleĢmeye baĢladığını göstermektedir.
Bu değerlerin standartlar tarafından belirlenen sınırlar içerisinde kalabilmesi için
endüktans değerinin yeterince büyük olması gereklidir. Öte yandan, devrenin
tasarlandığı gibi yükseltme iĢlemi yapabilmesi için endüktans değerinin belli bir
değerin altında olması gereklidir. Tasarlanan devrede maksimum endüktans değeri
1.3 mH olarak hesaplanmıĢ, deneyler ise 300 µH ve 600 µH ile gerçekleĢtirilmiĢtir.
300 µH kullanılması durumunda elde edilen sonuçlar arzulanandan çok farklıdır. 600
µH kullanıldığında ise düĢük akımlarda elde edilen sonuçlar tatmin edici değildir. Bu
nedenle 1 mH civarında bir endüktans ile deneylerin tekrar edilmesinde yarar vardır.
Bu çalıĢmanın devamında, farklı modülasyon tekniklerinin kullanılmasına ve
optimum endüktans değerinin belirlenmesine yönelik çalıĢmalar yapılmalıdır.
Ayrıca,
denetleyici
geliĢtirilebilir.
tasarımı
üzerinde
çalıĢarak
yeni
denetleyici
yapıları
96
KAYNAKLAR
1.
IEEE Standart 519 – 1981 Düzenlenmesi “ IEEE Recommended Practices and
Requirements for Harmonic Control in Electrical Power Systems”, IEEE Standard
519 – 1992, (1993).
2.
Mohan, N., Undeland, T.M., Robbins, W.P., “Güç Elektroniği Çeviriciler Uygulama
ve Tasarım”, Tuncay, N., GökaĢan, M., Boğosyan, S., Literatür Yayıncılık, 85 – 125,
(2003).
3.
Singh, B., Singh, B.N., Chandra, A., Al – Haddad, K., Pandey, A., Kothari, D.P., “A
Review of Three – Phase Improved Power Quality AC – DC Converters”,
IEEETransactions on Industrial Electronics, 51, 641 – 660, (2004).
4.
Rashid, M.H., “Power Electronics Handbook”, Academic Press, 183 – 196, 431 –
484, (2001).
5.
Erickson, R.W., “Some Topologies of High Quality Rectifiers”, First International
Conference on Energy, Power, and Motion Control, Tel - Aviv, 1 – 6, (1997).
6.
Liserre, M., Blaabjerg, F., Hansen, S., “Design and Control of an LCL – Filter –
Based Three – Phase Active Rectifier”, IEEE Transactions on Industry
Applications, 1281 – 1291, (2005).
7.
Lindgren, M., Svensson, J., “Control of a Voltage – source Converter Connected to
the Grid through an LCL – filter – Application to Active Filtering”, Power
Electronics Specialists Conference PESC 98, Fukuoka, 229 – 235, (1998).
8.
Lindgren, M., Svensson, J., “Connecting Fast Switching Voltage – source Converters
to the Grid – Harmonic Distortion and its Reduction”, IEEE Stockholm Power Tech
Conference Proceedings of Power Electronics, Stockholm, 191 – 195, (1998).
9.
Holtz, J., “Pulsewidth Modulation for Electronic Power Conversion”, IEEE
Proceedings, 82: 1194 – 1214, (1994).
10. Bose, B.K., “Modern Power Electronics and Ac Drives”, Prentice Hall, 183 – 196,
431 – 484, (2002).
11. Kazmierkowski, M.P., Krishnan, R., and Blaabjerg, F., “Control in Power
Electronics: Selected Problems ”, Academic Press, 396 – 401, (2002).
12. Sarıoğlu, K., GökaĢan,M., Boğosyan,S., Asenkron Motorlar ve
yayınları , 254-271, (2003).
Kontrolu Birsen
13. Jong woo choi, sung il yong, seung ki sul. “Evirici output voltage synthesis using
novel dead time compensation”IEEE Applied Power Electronics Conference and
Exposition, Pages: 100 – 106, (1994).
97
14. Seung‐gi jeong, min‐ho park. “The analysis and compensation of dead‐time effects in
PWM eviricis”.IEEE Transactions on Industrial Electronics, Pages: 108 – 114,
(1991).
15. Wu, R., Dewan, S.B., Slemon, G.R., “A PWM AC to DC Converter with Fixed
Switching Frequency”, IEEE Transactions on Industry Applications, 26, 880 – 885,
(1990).
16. Blasko, V., Kaura, V., “A New Mathematical Model and Control of a Three – Phase
AC – DC Votage Source Converter”, IEEE Transactions on Power Electronics, 116
– 123, (1997).
17. Liserre, M., Dellaquıla, A., Blaabjerg, F., “An Overview of Three – Phase Voltage
Source Active Rectifiers Interfacing the Utility”, Bologna PowerTech Conference,
Bologna, (2003).
18. Lindgren, M.,“Modelling and Control of Voltage Source Converters Connected to
Grid ”, Doktora Tezi, School of Electrical and Computer Engineering Chalmers
University of Technology, Göteborg, Sweden, (1998).
19. Ye, Z.,“Modelling and Control of Parallel Three – Phase PWM Converters”, Doktora
Tezi, Faculty of the Virginia Polytechnic and State University, Virginia, U.S.A,
(2000).
20. Zargari, N.R., Joos, G., “Performance Ġnvestigation of a Curretn – Controlled
Voltage – Regulated PWM Rectifier in Rotating and Stationary Frames”, IEEE
Transactions on Industrial Electronics, 396 – 401, (1995).
21. Verdelho, P., Marques, G. D., “DC Voltage Control and Stability Analysis of PWM
Voltage – Type Reversible Rectifiers”, IEEE Transactions on Industrial
Electronics, 263 – 273, (1998).
22. Mendalek, N., Al – Haddad , K., “Modelling and Nonlinear Control of Shunt Active
Power Filter in the Synchronous Reference Frame”, Ninth International Conference
on Harmonics and Quality of Power, Orlando, 215-219, (2000).
23. Dai, K., Liu, Y., Chen, J., “Decoupling Current Control for voltage Source Converter
in Synchronous Rotating Frame”, IEEE PEDS, Indonesia, 39 – 43, (2001).
24. Rioual, P., Pouliquen, H., “Nonlinear Control of PWM Rectifier by State Feedback
Linearization and Exact PWM Control”, Power Electronics Specialists Conference,
PESC 94 Record, 1095 – 1100, (1994).
25. Lee, T.S., “Input Output Linearizing and Zero – Dynamics Control of Three – Phase
AC/DC Voltage – Source Converters”, IEEE Transactions on Power Electronics,
11 – 22, (2003).
98
26. Lee, T.S., Tzeng, K.S., “Input – Output Linearizing Control with Load Estimator for
Three – Phase AC/DC Voltage – Source Converters”, Power Electronics Specialists
Conference PESC, 791 – 795, (2002).
27. Lee, D.C., “Advanced Nonlinear Control of Three – Phase PWM Rectifiers”, IEE
Proceedings Electric Power Applications, 361 – 366, (2000).
28. Lee, D.C., Lee, K.D., Lee, G.M., “Voltage Control of PWM Converters using
Feedback Linearization”, Thirty-Third IAS Annual Meeting Industry Applications
Conference, St. Louis, 1491 – 1496, (1998).
29.
Lee, D.C., Lee, G.M., Lee, K.D., “Dc – Bus Voltage Control of Three – Phase
Ac/Dc PWM Converters Using Feedback Linearization”, IEEE Transactions on
Industrial Applications, 826 – 833, (2000).
30.
Lee, T.S., “Nonlinear State Feedback Control Design for Three – Phase PWM Boost
Rectifiers Using Extended Linearisation”, IEE Proceedings Electric Power
Applications, 546 – 553, (2003).
31. Burgos, R.P., Wiechmann, E.P., Holtz, J., “Complex State Variables Modelling and
Nonlinear Control of PWM Voltage and Current Source Rectifiers”, IEEE 2002
28th Annual Conference of the Industrial Electronics Society, IECON 02, 187 –
192, (2002).
32. Espinoza, J.R., Joos, G., Bakhshai, A., “Non – Linear Control and Stabilization of
PWM Current Source Rectifiers in the Regenaration Mode”, Applied Power
Electronics Conference and Exposition, APEC 97 Conference Proceedings,
Atlanta, 902 – 908, (1997).
33. Espinoza, J.R., Joos, G.,“State Variable Decoupling and Power Flow Control in
PWM Current Source Rectifiers”, IEEE Transactions on Industrial Electronics, 78
– 87, (1998).
34. Kaletsanos, A., Xepapas, F., Xepapas, S., Manias, S.N., “Nonlinear Control
Technique for Three – Phase Boost AC/DC Power Converter”, Power Electronics
Specialist Conference PESC 03, 1080 – 1085, (2003).
35. Kömürcügil, H., Kükrer, O., “Lyapunov – Based Control for Three – Phase PWM
AC/DC Voltage – Source Converters”, IEEE Transactions on Power Electronics,
801 – 813, (1998).
36. Lee, D.C., Lim, D.S.,“AC Voltage and Current Sensorless Control of Three – Phase
PWM Rectifiers”, IEEE Transactions on Power Electronics, 883 – 890, (2002).
99
37. Lee, W.C., Hyun, D.S., Lee, T.K., “A Novel Control Method for Three – Phase
PWM Rectifiers Using a Single Current Sensor”, IEEE Transactions on Power
Electronics, 761 – 767, (2000).
38. Kazmierkowski, M.P., Malesani, L., “Current Control Techniques for Three – Phase
Voltage – Source PWM Converters: A Survey”, IEEE Transactions on Industrial
Electronics, 691 – 703, (1998).
39. Burgos, R.P., Wiechmann, E.P., Rodriguez, J.R., “An Adaptive Fuzzy Logic
Controller for Three – Phase PWM Boost Rectifiers: Design and Evaluation under
Transient Conditions”, Proceedings of the 24th Annual Conference of the IEEE
Industrial Electronics Society IECON 98, 2761 – 767, (1998).
40. Liserre, M., Dell`Aquila, A., Cecati, C., Ometto, A., “A Fuzzy Logic CC – PWM
Three – Phase AC/DC Converter”, IEEE Transactions on Power Electronics, 987 –
989, (2000).
41. Burgos, R.P., Wiechmann, E.P., Rodriguez, J.R., “Development of A Fuzzy Logic
Controller for Boost Rectifier with Active Power Factor Correction”, Power
Electronics Specialists Conference, PESC 99, Charleston, 149 – 154, (1999).
42.
Lin, B.R., Wiechmann, E.P., Rodriguez, J.R., “Analysis of neural and fuzzy – power
electronic control”, IEE Proceeding Science Measurement and Technology, 144,
25 – 33, (1997).
43. Cecati, C., Dell`Aquila, A., Liserre, M., Ometto, A., “A Fuzzy Logic Based
Controller for Active Rectifier”, IEEE Transactions on Industry Applications, 105
– 112, (2003).
44. Pena, S.R., Cardenes, R.J., Clare, J.C., Asher, G.M., “Control Strategies for Voltage
Control of a Boost Type PWM Converter”, Power Electronics Specialists
Conference, PESC 2001, 730 – 735, (2001).
45. Cichowlas, M., Malinowski, M., Kazmierkowski, M.P., Blaabjerg F., “Direct Power
Control for Three – Phase PWM Rectifier with Active Fitering Function”, APEC 03
Eighteenth Annual IEEE Applied Power Electronics Conference and Exposition,
913 – 918, (2003).
46. Blasko, V., Agirman, I., “Modelling and Control of Three – Phase Regenerative Ac –
Dc Converters”, Proceedings of the 40th IEEE Conference on Decision and
Control, Orlando, 2235 – 2240, (2001).
47. Kaytaz, V.G., “ A New Simulation Model Coupled Electro-Thermal Performance for
MOSFET Devices”, PhD Thesis, SMU Mechanical Engineering Department, USA,
(2005).
111
48. Hermwille, M.,“Cooling of Power Semiconductors and Their Characteristics”,
Istanbul, Ekim 21-22, 5-6, (2007).
49. Campbell, J.R., Rajashekara, M.K., “Evaluation of Power Devices for Automotive
Hybrid and 42V Based Systems”, SAE World Congress, Detroit, Michigan, USA,
Mart 8-11, (2004).
50. Motto, E.R., “Trench-Gate Technology For The Next Generation of MOS Power
Devices”, Institute of Electrical and Electronics Engineers (IEEE) APEC
Conference, Dallas, Texas, USA, Mart 14-18, (1999).
51. Chung S., “A Phase Tracking System for Three Phase Utility Interface Inverters”,
IEEE Transactions on Power Electronics, 431-438, (2000).
52. J.B.Ejea, E.Sanchis, A.Ferreres, “High Frequency bi-directional three phase rectifier
based on matrix converter topology with power factor correction” in Proc. IEEE
APEC, (2001).
53. Marco Liserre, Remus Teodorescu, Frede Blaabjerg, “ Multiple Harmonics Control for
Three-phase Grid Converter Systems With the Use of PI-RES Current Controller in a
Rotating Frame ”, IEEE Transactions on Power Electronics, ( 2006).
111
EKLER
112
EK-1. 120V – 69kV‟ luk genel dağıtım sistemi için akım bozunum sınırı
Maksimum Akım Harmonik Bozunumu
Bireysel harmonik sırası
TDD
h
20
4
2
1.5
6
0.3
5
20
7
3.5
2.5
1
0.5
8
10
4.5
4
1.5
0.7
12
12
5.5
5
2
1
15
15
7
6
2.5
1.4
20
50
50
100
100
1000
113
EK-2. 69.001 – 161kV‟ luk altdağıtım sistemi için akım bozunum sınırı
Maksimum Akım Harmonik Bozunumu
Bireysel harmonik sırası
TDD
h
20
2
1
0.75
0.3
0.15
2.5
20
3.5
1.75
1.25
0.5
0.25
4
5
2.25
2
0.75
0.35
6
6
2.75
2.5
1
0.5
7.5
7.5
3.5
3
1.25
0.7
20
50
50
100
100
1000
114
Ek -3. Gerilim >161kV genel dağıtım sistemleri için akım bozunum sınırı
Maksimum Akım Harmonik Bozunumu
Bireysel harmonik sırası
TDD
h
20
2
1
0.75
0.3
0.15
2.5
20
3
1.5
1.15
0.45
0.22
3.75
50
115
Ek -4. Gerilim bozunum sınırı
Bağlantı noktası
Tekil harmonik büyüklüğü
gerilimi
Toplam gerilim
bozunumu
3
5
69.001 – 161 KV
1.5
2.5
161 KV
1
1.5
116
Ek - 4. Mitsubishi IGBT bilgi dosyası
117
118
ÖZGEÇMĠġ
KiĢisel Bilgiler
Soyadı, adı
PASHAEI , ALI
Uyruğu
Doğum tarihi ve
yeri
IRAN
Medeni hali
BEKAR
Telefon
0 (312) 582 3303
e-mail
ali.pashaei@gazi.edu.tr
22/08/1989 TABRIZ
Eğitim
Eğitim Birimi
Derece
Mezuniyet
tarihi
Lisans
Tabriz Azad Üniversitesi Elektrik-Elektronik
Müh.
2011
Lise
Ferdosi Lisesi
2007
Yabancı Dil
Ingilizce
Farsça
Azerice