CEBRSEL TOPOLOJ
Prof. Dr. smet KARACA
Ders Notlar
çindekiler
1
HOMEOMORFZM
2
2
DENTFKASYON UZAYLAR
11
3
BÖLÜM UZAYLARI
17
4
HOMOTOP
24
5
TEMEL GRUPLAR
32
6
ÖRTÜLÜ UZAYLAR
37
7
ÇEMBERN TEMEL GRUBU
42
8
DELNM DÜZLEMN TEMEL GRUBU
47
9
S n 'N
TEMEL GRUBU
50
10 YÜZEYLERN TEMEL GRUBU
52
11 AYNI HOMOTOP TPNE SAHP UZAYLAR
53
12 SMPLEKSLER
57
13 SIMPLICIAL KOMPLEKSLER
67
1
Bölüm 1
HOMEOMORFZM
X ve Y birer topolojik uzay olmak üzere f : X −→ Y bijektif
f ve f nin tersi f −1 sürekli ise f fonksiyonuna homeomorzm
denir. E§er f : X −→ Y fonksiyonu homeomorzm ise X uzay Y uzayna
homeomorktir denir ve X ≈ Y ile gösterilir.
Tanm 1.0.1.
olsun. E§er
Örnek 1.0.1.
[a, b] ≈ [c, d]
oldu§unu gösteriniz.
Çözüm:
f : [a, b] −→ [c, d]
f
ile tanmlansn.
i) f bijektiftir:
• ∀x1 , x2 ∈ [a, b]
f
d−c
(x − a)
b−a
homeomorzmadr.
için
f (x1 ) = f (x2 ) ⇒ c +
Böylece
x 7→ f (x) = c +
d−c
d−c
(x1 − a) = c +
(x2 − a) ⇒ x1 = x2
b−a
b−a
bire birdir.
• ∀y ∈ [c, d]
için
f (x) = y
f (x) = y ⇒ c +
Dolaysyla
f
Sonuç olarak
olacak ³ekilde
vardr:
d−c
b−a
(x − a) = y ⇒ x = a + (y − c)
∈ [a, b]
b−a
d−c
örtendir.
f
∃x ∈ [a, b]
bijektiftir.
2
ii)
f
ve
1.Yol:
f −1
süreklidir:
f (x) = c +
b−a
d−c
(x − a), f −1 (x) = a +
(x − c) fonksiyonlar, x bib−a
d−c
rim fonksiyonunun sabit bir fonksiyonla çkarlmas, toplanmas, çkarlmas
ve çarpmlar ³eklinde yazlabildi§inden bu fonksiyonlar süreklidirler.
2.Yol:
f : ([a, b], τ[a,b] ) −→ ([c, d], τ[c,d] )
(e, q) ∈ τd
~
⇔ ∀V ∈ τ[c,d]
için
f −1 (V ) ∈ τ[a,b]
olmak üzere
τ[a,b]
(k, l) ∈ τd
~
süreklidir
(e, q)
[a, b]
= (e, q) ∩ [a, b] = [a, q)
(e, b]
∅
a < e ve q < b
e < a ve b < q
e<a<q<b
a<e<b<q
e, q < a veya b < e, q.
olmak üzere
τ[c,d]
(k, l)
[c, d]
= (k, l) ∩ [c, d] = [c, l)
(k, d]
∅
(k, l) ∈ τ[c,d] için;
b−c
f −1 (k) = a + d−c
(k − c); c < k < d
f −1 (l) = a +
b−c
(l
d−c
− c)
c<l<d
c < k ve l < d
k < c ve d < l
k<c<l<d
c<k<d<l
k, l < c veya d < k, l.
oldu§undan
oldu§undan
< 1 ⇒ a < f −1 (k) < b
l−c
< 1 ⇒ a < f −1 (l) < b.
d−c
k−c
d−c
⇒ f −1 ((k, l)) = (e, q) ∈ τ[a,b] , a < e < q < b
[c, d] ∈ τ[c,d]
için;
[c, l) ∈ τ[c,d]
oldu§undan
f −1 (c) = a, f −1 (d) = b ⇒ f −1 ([c, d]) = [a, b] ∈ τ[a,b]
için;
f −1 (c) = a, f −1 (l) = a +
b−a
(l − c), k < c < l < d
d−c
l−c
< 1 ⇒ a < f −1 (l) < b ⇒ f −1 ([c, l)) = [a, q) ∈ τ[a,b]
d−c
3
(k, d] ∈ τ[c,d]
f −1 (d) = b, f −1 (k) = a +
için;
b−c
(k − c), c < k < d < l
d−c
k−c
< 1 ⇒ a < f −1 (l) < b ⇒ f −1 ((k, d]) = (e, b] ∈ τ[a,b]
d−c
⇒ f süreklidir. Benzer ³ekilde f −1 'in süreklili§i de gösterilebilir.
oldu§undan
Sonuç olarak
f
Örnek 1.0.2.
homeomorzmadr.
f : (−1, 1) −→ R
x
x 7→ f (x) = 1−x
2
homeomorzma mdr?
Çözüm:
i) f bijektiftir:
• ∀x1 , x2 ∈ (−1, 1)
için
f (x1 ) = f (x2 ) ⇒
Böylece
f
• ∀y ∈ R
x1
x2
=
⇒ x1 = x2
2
1 − x1
1 − x22
bire birdir.
için
f (x) = y
olacak ³ekilde
∃x ∈ (−1, 1)
vardr:
p
−1
∓
1 + 4y 2
x
2
f (x) = y ⇒
=
y
⇒
yx
+
x
−
y
=
0
⇒
x
=
1 − x2
2y
Böylece
ii)
f
ve
f
örtendir.
f −1
süreklidir:
τ(−1,1)
(−1, 1)
a < −1 < 1 < b
−1 < a < b < 1
(a, b)
(−1, b)
a < −1 < b < 1
= (−1, 1) ∩ (a, b) =
(a, 1)
−1 < a < 1 < b
∅
a, b < −1 ∨ 1 < a, b
f −1 (x) =
(a, b) ∈ τd
için
√
−1+ 1+4x2
2x
0
x 6= 0
x=0
f −1 ((a, b)) ∈ τ(−1,1) ?
f
−1
(a) =
−1 +
4
√
1 + 4a2
.
2a
S 1 = {(x, y) ∈ R2 |x2 + y 2 = 1}
|y| = 1} olsun. S 1 ≈ K oldu§unu gösteriniz.
Örnek 1.0.3.
ve
K = {(x, y) ∈ R2 ||x| +
Çözüm:
1
−1
1
1
−1
1
−1
−1
ekil 1.1: Çember kareye homeomorftur
f : S 1 −→ K
y
x
(x, y) 7→ f (x, y) = |x|+|y|
, |x|+|y|
x
y
ve y1 =
|x|+|y|
|x| + |y| x y |x| + |y| = |x|+|y| + |x|+|y| =
~ x1 =
O halde
x1
ve
y1
ise, bu durumda
|x|2 +2|x||y|+|y|2
(|x|+|y|)2
=
(|x|+|y|)2
(|x|+|y|)2
=1
noktalar karenin üzerindedir.
(x1 , y1 ) = (x2 , y2 ) ∈ S 1 için
y1
x2
y2
x1
,
= Big(
,
=
f (x1 , y1 ) =
|x1 | + |y1 | |x1 | + |y1 |
|x2 | + |y2 | |x2 | + |y2 |
f (x2 , y2 )
i) Her
Böylece
ii) Her
f
iyi tanmldr.
x1
y1
x2
y2
,
,
,
∈K
|x1 | + |y1 | |x1 | + |y1 |
|x2 | + |y2 | |x2 | + |y2 |
x2
x1
=
⇒ x1 = x2
|x1 | + |y1 |
|x2 | + |y2 |
Böylece
f
için
y2
y1
=
⇒ y1 = y2
|x1 | + |y1 |
|x2 | + |y2 |
bire birdir.
5
(k, t) ∈ K için f (x, y) = (k, t) olacak ³ekilde ∃(x, y) ∈ S 1 vardr:
x
y
x
y
f (x, y) =
,
= (k, t) ⇔ k =
∧t=
|x| + |y| |x| + |y|
|x| + |y|
|x| + |y|
2
2
x
y
k2 =
, t2 =
olmak üzere
(|x| + |y|)2
(|x| + |y|)2
1
x2 + y 2
⇒
= k 2 + t2
k 2 + t2 =
2
2
(|x| + |y|)
(|x|
+
|y|)
(
x = √k2k+t2
1
k
t
2
2
√
√
⇒ |x|+|y| = √
⇒
,
x
+y
=
1
⇒
,
∈
y = √k2t+t2
k 2 + t2
k 2 + t2
k 2 + t2
iii) Her
S 1.
Böylece
iv)
f
f
ve
örtendir.
f −1 : K −→ S 1
(x, y) 7→ f −1 (x, y) = √
Lemma 1.0.1.
2)
3)
süreklidir.
x
,
x2 +y 2
√
y
x2 +y 2
1) Homeomorf iki fonksiyonun bile³kesi yine homeomorftur.
Homeomorf fonksiyonun tersi de homeomorftur.
Birim dönü³üm
1 : (X, τ1 ) −→ (X, τ2 )
homeomorf
⇔ τ1 = τ2 .
spat:
X ≈ Y, Y ≈ Z ⇒ X ≈ Z :
f : X −→ Y, g : Y −→ Z homeomorf olsun. g ◦ f : X −→ Z homeomorzmadr. Çünkü; f ve g bijektif ise g ◦ f de bijektif, f ve g sürekli ise g ◦ f de
1)
süreklidir.
X ≈ Y ⇒ Y ≈ X:
f : X −→ Y homeomorzma olsun. O halde f bijektif
−1
süreklidir. f
: Y −→ X sürekli, örten, (f −1 )−1 = f
−1
oldu§undan f
de homeomorzmadr. Y ≈ X
2)
3)
(⇒:) 1X : (X, τ1 ) −→ (X, τ2 )
−1
=U
1X (U ) = (1−1
X )
−1
bu sebeple 1X süreklidir. Bu durumda
(1)
ve
sürekli,
−1
V ∈ τ2 olsun. 1−1
X (V ) = V
durumda V ∈ τ1 . O halde τ2 ⊂
homeomorzm,
açktr; çünkü homeomorzm vardr. Bu
τ1 ...(1)
U ∈ τ1
f −1 de
f 1−1
ve sürekli,
olsun.
∈ τ2 ; çünkü 1X
τ1 ⊂ τ2 ...(2)
homeomorzmdir ve
(2)den τ1 = τ2 .
(⇐:) τ1 = τ2
olsun. Yansma özelli§inden dolay
6
1X : (X, τ1 ) −→ (X, τ2 )
homeomorzmdir.
Sonuç 1.0.1. Homeomorzma ba§nts bir denklik ba§ntsdr.
Önerme 1.0.1.
f : X −→ Y
homeomorzma,
(i) A, X de kapal ⇔ f (A), Y
(ii) f (A) = [f (A)]
(iii) f (A◦ ) = [f (A)]◦
A⊂X
olsun.
de kapal
spat:
(i)
(⇒:)
A⊂X
Teorem:
f
homeomorzma
kapal olsun. O halde
f
⇒f
kapal sürekli fonksiyondur.
kapal sürekli fonksiyon oldu§undan
f (A), Y
de kapaldr.
(⇐:)
f
Teorem:
sürekli ise
homeomorzma oldu§undan
sun. O halde
A
f : X −→ Y
f
oldu§undan
(ii)
−1
f −1
için
f −1 (K) ∈ KX
dir.
f (A) ⊂ Y kapal ol(f (A)), X de kapaldr. f −1 (f (A)) =
sürekli fonksiyondur.
sürekli oldu§undan
A⊂X
∀K ∈ KY
f
−1
de kapaldr.
f (A) = [f (A)] ⇔ f (A) ⊂ [f (A)](?) ∧ [f (A)] ⊂ f (A)(?)
~ [f (A)] ⊂ f (A)
∀A ⊂ X için A ⊂ A ⇒ f (A) ⊂ f (A) ⇒ f (A) ⊂ f (A)
f kapal fonksiyon oldu§undan A ∈ KX için f (A) ∈ KY
f (A) dr.
⇒ [f (A)] ⊂ f (A)
dir. O halde
f (A) =
~ f (A) ⊂ f (A)
Y uzaynda f (A) y kapsayan kapal küme K 0 olsun. Yani f (A) ⊂ K 0 olsun.
−1
Bu durumda A ⊂ f
(f (A)) ⊂ f −1 (K 0 ), f −1 sürekli oldu§undan f −1 (K 0 )
kapaldr. O halde; A, A y kapsayan en küçük kapal küme oldu§undan
A ⊂ A ⊂ f −1 (K 0 ) dür. f (A) ⊂ f (f −1 (K 0 )) ⊂ K 0 ve seçilen K 0 kapals
f (A) seçilebilece§inden f (A) ⊂ f (A) dr.
(iii)
f (A◦ ) = [f (A)]◦ ⇔ f (A◦ ) ⊂ [f (A)]◦ ∧ [f (A)]◦ ⊂ f (A◦ )
~ f (A◦ ) ⊂ [f (A)]◦
∀A ⊂ X için A◦ ⊂ A dr. O halde f (A◦ ) ⊂ f (A) dr. f (A) ⊂ Y
7
nin kapsad§
en büyük açk küme
[f (A)]◦
oldu§undan;
f (A◦ ) ⊂ [f (A)]◦
olmak zorundadr.
~ [f (A)]◦ ⊂ f (A◦ )
Bu ³kkn ispat al³trma olarak okuyucuya braklm³tr.
Teorem 1.0.1.
X
kompakt,
fonksiyon olsun. O zaman
spat:
f −1
f
Y
Hausdor ve
f : X −→ Y
sürekli, bijektif
homeomorzmadr.
in sürekli oldu§unu göstermemiz gereklidir. Yani
f
nin kapal
C , X te kapal olsun. X komC de kompakttr. (Kompakt uzaylarn kapal alt uzaylar
da kompakttr.) f (C), Y de kompakttr. (Kompakt uzayn sürekli dönü³üm
altnda görüntüsü kompakt oldu§undan Y de kompakttr.) f (C), Y de kapaveya açk dönü³üm oldu§unu göstermeliyiz.
pakt oldu§undan
ldr. (Hausdor uzayn kompakt alt uzay kapaldr.)
8
ALITIRMALAR
1) Herhangi iki
a, b ∈ R(a < b)
saylar için
[0, 1) ≈ [a, b) ≈ (0, 1] ≈ (a, b]
oldu§unu gösteriniz.
2)
[0, 1) ≈ [0, ∞)
3)
f : (−1, 1) −→ R
x 7→ f (x) =
ve
(0, 1) ≈ (0, ∞)
oldu§unu gösteriniz.
homeomorzma mdr? Açklaynz.
x
1−x2
4) Reel do§runun herhangi iki açk aral§ homeomorftur. Gösteriniz.
S herhangi bir topolojik uzay ise, bu takdirde h : (−1, 1) −→ S ve
j : R −→ S sürekli dönü³ümleri arasnda bire bir e³leme vardr; ve h−1 :
S −→ (−1, 1) ve j −1 : S −→ R sürekli dönü³ümleri arasnda bire bir e³leme
5)
vardr. spatlaynz.
f : S −→ T bir homeomorzm ve g : T −→ U bir homeomorzm
takdirde g ◦ f : S −→ U bir homeomorzmdir. spatlaynz.
6)
ise, bu
7) A, B, C, D, E, F, G, H, I, J, K, L, M, N, O, P, R, S, T, U, V, W,
Y, Z olmak üzere alfabenin elemanlarndan hangileri birbirine homeomorftur?
8) 0, 1, 2, 3, 4, 5, 6, 7, 8, 9 rakamlarnn hangileri birbirine homeomorftur?
9)
S = {1, 2}
ve
T
T = {1, 2} kümesi
g : T −→ S bir bijeksiyon
kümesi üzerinde discrete topolo ji ve
inde indiscrete topoloji tanmlanm³ olsun.
üzerise
S
homeomorf mudur?
S 1 = {(x1 , x2 ) ∈ R2 |x21 + x22 = 1} ve T = {x1 , x2 ) ∈ R2 ||x1 | + |x2 | = 1}
1
kümeleri verilsin. S ≈ T oldu§unu gösteriniz.
10)
11)
S 1 in [0, 1]
12)
V = (0, 1] ∪ (2, 3] ∪ (4, 5] ∪ . . .
kapal aral§na homeomorf olmad§n gösteriniz.
f (x) =
ve
f : V −→ V
x
2
x−1
2
x−2
x ∈ (0, 1]
x ∈ (2, 3]
di§er durumlarda
9
ile tanmlansn.
f
bir homeomorzm midir?
10
Bölüm 2
DENTFKASYON UZAYLAR
(X, τ )
Y herhangi bir küme ve p : X −→ Y örten
τ 0 = {V ⊂ Y |p−1 (V ) ∈ τ } kolleksiyonunun Y üzerinde
bir topolo jik uzay,
fonksiyon olsun.
bir
bir
topolo ji oldu§unu iddia ediyoruz:
t1 )
t2 )
p−1 (∅) = ∅ ∈ τ ⇒ ∅ ∈ τ 0 , p−1 (Y ) = X[
∈τ ⇒Y ∈τ
0
−1
{Vi }i∈I ∈ τ ⇒ ∀i ∈ I p (Vi ) ∈ τ ⇒
p−1 (Vi ) ∈ τ
[
[ i∈I
−1
⇒ p ( Vi ) ∈ τ ⇒
Vi ∈ τ 0
i∈I
t3 )
i∈I
U, V ∈ τ 0 ⇒ p−1 (U ), p−1 (V ) ∈ τ ⇒ p−1 (U ) ∩ p−1 (V ) ∈ τ
⇒ p−1 (U ∩ V ) ∈ τ ⇒ U ∩ V ∈ τ 0
Y üzerinde olu³turulan τ 0 topolojisine identikasyon topo0
lo jisi denir. (Y, τ ) topolojik uzayna (X, τ ) uzaynn identikasyon uzay,
p : (X, τ ) −→ (Y, τ 0 ) dönü³ümüne identikasyon dönü³ümü denir.
Tanm 2.0.2.
Önerme 2.0.2.
Y
∀V ⊂ Y , Y
de açktr
⇔ p−1 (V ), X
de açktr
⇔ p : X −→
identikasyon dönü³ümüdür.
Not 2.0.1. Bu önerme mevcut ise
(⇒:)
(⇐:)
p : X −→ Y
identikasyon dönü³ümdür.
yönü süreklili§i belirtir.
yönü baz kitaplarda açklk ile denk tutulur fakat bu genelde do§ru de-
§ildir.
11
Örnek 2.0.4.
X = {1, 2, 3}, τ = {X, ∅, {1}, {1, 2}, {1, 3}}, Y = {a, b} olsun.
p : X −→ Y
1 7→ p(1) = a
2 7→ p(2) = b
3 7→ p(3) = a
dönü³ümü örtendir. Bu dönü³üm sürekli midir?
p
üzerindeki topolojiyi belir-
leyiniz.
Çözüm:
τ 0 = {∅, Y, {a}}
alalm.
p
bu topolo ji üzerinde identikasyon dön-
ü³ümdür.
p−1 (∅) = ∅ ∈ τ
p−1 (Y ) = X ∈ τ
−1
p ({a}) = {1, 3} ∈ τ
⇒p
sürekli dönü³ümdür.
Örnek 2.0.5.
C ⊂ [0, 1]
ile tanmlansn.
χC
χC : [0, 1] −→ [0, 1]
1 t∈C
t 7→ χC (t) =
0 t∈
/C
olmak üzere
dönü³ümü
identikasyon dönü³üm müdür?
Çözüm: C ⊂ [0, 1] olsun. τS , R
τ[0,1] = {[0, 1] ∩ V |V ∈ τS }.
üzerindeki standart topolo ji olmak üzere
~ C 6= ∅, C = [0, 1]∩Q alalm. τ 0 = {∅, {0, 1}} seçilirse (kümeyi {0, 1} ⊂ [0, 1]
−1
−1
seçti) χC (∅) = ∅, χC ({0, 1}) = [0, 1] ∈ τ[0,1] oldu§undan χC süreklidir.
a = 0,b = 1
{0, 1}
∅
a, b < 0 ∨ a, b > 1
χC ([0, 1] ∩ V ) = χC ([0, 1] ∩ (a, b)) =
(a, b)
0<a<b<1
O halde
χC
açktr. Sonuç olarak
Teorem 2.0.2.
p : X −→ Y
χC
identikasyon dönü³ümdür.
örten ve sürekli fonksiyon olsun. E§er
ü³ümü açk ya da kapal dönü³üm ise
spat:
p
p : X −→ Y
p
p
dön-
identikasyon dönü³ümdür.
örten, sürekli ve açk dönü³üm olsun.
identikasyon dönü³üm
:⇔ ∀V ⊂ Y, Y
de açk
⇔ p−1 (V ), X
de açk?
(⇒:) p sürekli oldu§undan a³ikardr.
(⇐:) p−1 (V ), X de açk olsun. p açk dönü³üm oldu§undan p(p−1 (V )), Y
−1
açktr. p örten dönü³üm oldu§undan p(p
(V )) = V dir. O halde V, Y
açktr.
12
de
de
Örnek 2.0.6.
p : R −→ S 1 ⊂ R2
t 7→ p(t) = e2πit = (cos 2πt, sin 2πt)
Çözüm:
∀y = (y1 , y2 ) ∈ S 1
y1
1
arctan
∈R
(y1 , y2 ) ⇒ t =
2π
y2
~ p
örtendir:
için
f (t) = y ⇒ (cos 2πt, sin 2πt) =
~ p süreklidir: p1 (t) = cos 2πt sürekli, p2 (t) = sin 2πt sürekli ⇒ p = (p1 (t), p2 (t))
süreklidir.
~ p
hem açk hem de kapal dönü³ümdür. Bu ispat okuyucuya braklm-
³tr.
p
Sonuç olarak Teorem 2.0.4 gere§ince
Örnek 2.0.7.
identikasyon dönü³ümdür.
π1 : R × R −→ R
(x, y) 7→ π1 (x, y) = x
Çözüm:
~ π1 örtendir: ∀z ∈ R
∃(x, y) ∈ R × R
~ π1
~ π1
için
π1 (x, y) = z ⇒ x = z, y ∈ R
olacak ³ekilde
V ⊂ R açk için π1−1 (V ) = V × R ⊂ R × R de açk
∀W = U × V ∈ R × R açk için π1 (W ) = U, R de açk
süreklidir:
açktr:
O halde
π1
identikasyon dönü³ümdür.
π1 kapal dönü³üm de§ildir. K = {(x, y) ∈ R2 |y =
π1 (K) = (−∞, 0) ∪ (0, ∞) R de kapal de§ildir.
Fakat
kapal iken,
Teorem 2.0.3.
ve
Z
Y
topolojik uzay,
topolojik uzay
Y
X
1
},
x
R2
de
topolojik uzaynn identikasyon uzay
uzaynn identikasyon uzay olsun. O zaman
Z, X
in identikasyon uzaydr.
spat:
p : X −→ Y , q : Y −→ Z
~ k : X −→ Z
X de açk)
identikasyon dönü³ümü olsun.
identikasyon dönü³ümdür
⇔ (∀V ⊂ Z
önermesini kullanaca§z (Önerme 2.0.2).
(⇒:) V, Z de açk olsun. k = q ◦ p : X −→ Z
k −1 (V ) = (q ◦ p)−1 (V ) = p−1 (q −1 (V ))
13
dir.
de açk
⇔ k −1 (V ) ⊂
q identikasyon
p identikasyon
⇒ k −1 (V ), X de
dönü³üm oldu§undan
dönü³üm oldu§undan
q −1 (V ), Y de açktr.
p−1 (q −1 (V )), X de açktr.
açktr.
(⇐:) k −1 (V ), X de açk olsun.
k −1 (V ) = p−1 (q −1 (V )) açk olmas için q −1 (V ) nin açk olmas
mektedir. q identikasyon dönü³üm oldu§undan V ⊂ Z de açktr.
Teorem 2.0.4.
p : X −→ Y
gerek-
identikasyon dönü³üm olsun. Herhangi bir
Z
uzay için;
k : Y −→ Z
süreklidir
⇔ k ◦ p : X −→ Z
süreklidir.
spat:
(⇒:) k ve p sürekli oldu§undan k ◦ p : X −→ Z süreklidir.
(⇐:) k ◦ p : X −→ Z sürekli olsun. ∀V ⊂ Z açk için k −1 (V ), Y de açk mdr?
(k ◦ p)−1 (V ), k ◦ p sürekli oldu§undan, X de açktr.
(k◦p)−1 (V ) = p−1 (k −1 (V ))in X de açk olmas için k −1 (V )nin Y de açk olmas
gerekmektedir. Çünkü p identikasyon dönü³ümdür.
Teorem 2.0.5.
p : X −→ Y
g : X −→
∀x, x ∈ X için p(x) =
identikasyon dönü³üm olsun.
0
Z a³a§daki özelli§e sahip sürekli fonksiyon olsun:
p(x0 ) ⇒ g(x) = g(x0 ).
O zaman h ◦ p = g olacak ³ekilde bir tek h : Y −→ Z
sürekli fonksiyonu
vardr.
spat:
olsun.
h : Y −→ Z
y 7→ h(y) = g(p−1 (y))
h iyi tanml, sürekli ve örtendir.
Sonuç 2.0.2.
p : X −→ Y , q : X −→ Z
identikasyon dönü³üm ise
Y ≈
Z dir.
h : Y −→ Z olsun.
h bijektif mi?
k : Z −→ Y olsun. k ◦ h = 1Y ⇔ h, 1 − 1
spat:
1)
ve
h ◦ k = 1Z ⇔ h,
göstemeliyiz.
X@
p
@@
@@
q @@
Z
q =h◦p
ve
p=k◦q
/Y
~?
~
k ~
~~
~
~
göz önüne alalm.
14
örten oldu§unu
(h ◦ k) ◦ q = h ◦ (k ◦ q) = h ◦ p = q = 1Z ◦ q ⇒ h örten
(k ◦ h) ◦ p = k ◦ (h ◦ p) = k ◦ q = p = 1Y ◦ p ⇒ h, 1 − 1
⇒ h bijektif
2) kinci teoremden
q =h◦p
3) kinci teoremden
p = h−1 ◦ q
sürekli
⇔h
sürekli
15
sürekli
⇔ h−1
sürekli
ALITIRMALAR
X = {a, b, c, d}, τX = {∅, X, a, a, b, b, c, d, b}, Y = {0, 1}
f : X −→ Y
1)
olmak üzere
f (a) = f (c) = 0, f (b) = f (d) = 1
dönü³ümünü sürekli klan,
Y
üzerindeki en geni³ topolo jiyi bulunuz.
2) a) Açk dönü³üm olmayan bir identikasyon dönü³ümü örne§i bulunuz.
b) Kapal dönü³üm olmayan bir identikasyon dönü³ümü örne§i bulunuz.
16
Bölüm 3
BÖLÜM UZAYLARI
Tanm 3.0.3.
X
R, X üzerinde bir denklik ba§nts olsun. X/R
qR : X −→ X/R bölüm dönü³ümü kanonik dönü³üm-
bir küme ve
bir bölüm kümesidir.
dür.
(Her zaman örten olan dönü³ümlere kanonik dönü³üm ya da do§al dönü³üm
denir.)
X/R = [x]R = {z ∈ X|xRz}
qR : X −→ X/R bölüm dönü³ümünü sürekli
−1
0
en geni³ topoloji τ = {V ⊂ X/R : qR (V ) ∈ τ } dr ve
0
bölüm topolo jisi denir. (X/R, τ ) identikasyon uzayna da
(X, τ ) bir topolojik
klan Y üzerindeki
bu topolojiye
(X, τ )
uzay olsun.
nun bölüm uzay denir.
Örnek 3.0.8.
I = [0, 1], xRy ⇔ x = y = 0
veya
1
olsun.
qR : [0, 1] −→ [0, 1]/R
x 7→ qR (x) = [x]R
dönü³ümü bölüm dönü³ümüdür.
p : [0, 1] −→ S 1
t 7→ p(t) = e2iπt
identikasyon dönü³ümdür.
Sonuç2.0.1'den yararlanarak
[0, 1]/R ≈ S 1
oldu§unu söyleyebiliriz.
pb : [0, 1]/R −→ S 1
[x]R 7→ pb([x]R ) = p(x) = e2iπx
olsun.
17
i) pb,
bijektif dönü³ümdür:
~ pb([x]R ) = pb([y]R ) ⇒ e2iπx = e2iπy
⇒ cos 2πx = cos 2πy ∧ sin 2πx = sin 2πy
⇒ x = y + k , k = 0, 1
⇒x∼y
⇒ [x]R = [y]R
−1
~ pb, örten: p ve q örten oldu§undan pb = p ◦ qR
örtendir.
ii) pb sürekli ⇔ p = pb ◦ qR sürekli (Teorem 2.0.4)
iii) pb−1 sürekli ⇔ qR = pb−1 ◦ p sürekli (Teorem 2.0.4)
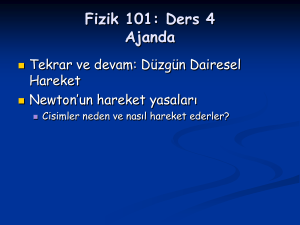
Örnek 3.0.9. A³a§daki gibi verilen
p : I × I −→ I × S 1
(s, t) 7→ p(s, t) = (s, e2iπt )
identikasyon dönü³ümdür.
q : I × I −→ I × I/R
(s, t) 7→ q(s, t) = p(s, t) = (s, e2iπt )
identikasyon dönü³ümdür.
p
k
k
e
f
f=e
b
d
a
c
h
a=c
b=d
g
l
h=g
ekil 3.1: Silindir
I × I/R ≈ I × S 1
dir.
pb : I × I/R −→ I × S 1
[s, t]R 7→ pb([s, t]R ) = p(s, t) = (s, e2iπt )
dönü³ümü homeomorzmadr.
18
p : I × I −→ S 1 × S 1
(s, t) 7→ (e2πis , e2πit )
q : I × I −→ I × I/R
(s, t) 7→ q(s, t) = [(s, t)]R
Örnek 3.0.10.
pb : I × I/R −→ S 1 × S 1
[s, t]R 7→ pb([s, t]R ) = p(s, t)
homeomorzmadr.
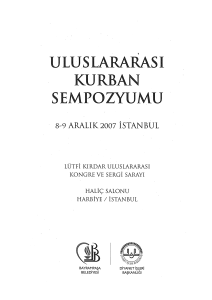
Örnek 3.0.11.
Mobius eridi: Mb
yönlendirilemeyen manifolddur.
p : I × I −→ I × I/ ∼, (0, s) ∼ (1, 1 − s)
ekil 3.2: Mobius eridi
19
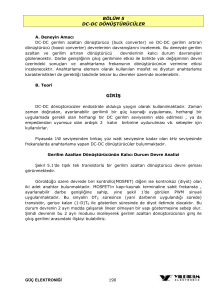
Örnek 3.0.12.
Projektif Düzlem:
Topun merkezinden geçecek ³ekilde to-
pun yüzeyine batrlan ³i³ler projektif düzlemdir.
p : S 2 −→ S 2 / ∼, x ∈ S 2 : x ∼ −x
ekil 3.3: Reel Pro jektif Düzlem
20
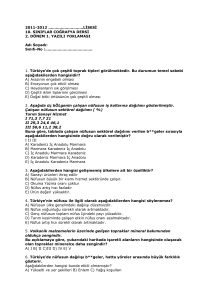
Örnek 3.0.13.
Klein i³esi: Kb
yönlendirilemeyen manifolddur.
p : I × I −→ I × I/ ∼, (0, t) ∼ (1, t), (s, 0) ∼ (1 − s, 1)
ekil 3.4: Klein i³esi
21
Bir Topolo jik Uzayn Süspansiyonu:
Tanm 3.0.4.
X
topolojik uzay ve
I = [0, 1]
olmak üzere;
X × I −→ X × I/X × {0, 1} = ΣX
bölüm uzayna
X
in süspansiyonu denir.
X = S1
Örnek 3.0.14.
alnrsa;
S 1 × I/S 1 × {0, 1} ∼
= S2
dir. Yani çemberin
süspansiyonu küredir.
⇒ ΣS 1 = S 2 ⇒ ΣS n−1 = S n
Tanm 3.0.5.
üzere
f
f : X −→ Y
sürekli verilsin.
X × I ∪ Y / ∼: x ∼ f (x)
olmak
dönü³ümüne silindir dönü³ümü denir.
Örnek 3.0.15.
X × I = S1 × I
alnrsa; silindir dönü³ümü elde edilir.
22
ALITIRMALAR
∼, bir X topolo jik uzay üzerinde denklik ba§nts ve R = {(x, y) ∈
X × X|x ∼ y} olsun. π : X −→ X/ ∼ do§al dönü³üm olsun. Bu durumda;
a) X/ ∼, H -uzay ise R ⊂ X × X in kapal oldu§unu gösteriniz.
b) R ⊂ X × X kapal ve π : X −→ X/ ∼ açk dönü³üm ise X/ ∼nn
H -uzay oldu§unu gösteriniz.
c) R ⊂ X × X açk ise,
iX : X −→ {x} × X
y 7→ iX (y) = (x, y)
1)
dönü³ümü
X
ile
{x} × X
uzaylarn homeomorf klyor olmak üzere
X/ ∼
üzerindeki bölüm topolo jisinin discret oldu§unu gösteriniz.
2)
π1 : R2 −→ R
(x, y) 7→ π1 (x, y) = x
izdü³üm fonksiyonu verilsin.
a)
X = (0 × R) ∪ (R × 0) ⊂ R2
alt uzay ve
g = π1 |X
olsun.
g
nin kapal
bir dönü³üm oldu§unu fakat açk olmad§n gösteriniz.
b)
Y = (R+ × R) ∪ (R × 0) ⊆ R2
alt uzay ve
h = π1 /Y
olsun.
h
n
kapal bir dönü³üm olmad§n ancak bölüm dönü³ümü oldu§unu gösteriniz.
g : R2 −→ R+ = [0, ∞)
(x, y) 7→ g(x, y) = x2 + y 2
biçiminde tanmlanan g dönü³ümünün bölüm dönü³ümü oldu§unu gösteriniz.
3)
g : R2 −→ R
(x, y) 7→ g(x, y) = x + y 2
biçiminde tanmlanan g dönü³ümünün bölüm dönü³ümü oldu§unu gösteriniz.
4)
p : X −→ Y bir sürekli dönü³üm olsun. p ◦ f = 1Y olacak ³ekilde sürekli
bir f : Y −→ X dönü³ümü mevcutsa, p bir bölüm dönü³ümüdür. Gösteriniz.
5)
6) Retraksiyonun bir bölüm dönü³ümü oldu§unu gösteriniz.
π1 : R × R −→ R birinci koordinat üzerine
R × R nin A alt uzay ³u ³ekilde tanmlansn:
7)
A = {x × y|x ≥ 0
q : A −→ R, π1
in kstlan³ olsun.
q
ya da
y = 0}.
nun bir bölüm dönü³ümü oldu§unu,
fakat açk dönü³üm olmad§n gösteriniz.
23
izdü³üm fonksiyonu olsun.
Bölüm 4
HOMOTOP
Tanm 4.0.6. X, Y iki topolojik uzay, f, g : X −→ Y sürekli iki dönü³üm ve
I = [0, 1] olsun. ∀x ∈ X için H(x, 0) = f (x) ve H(x, 1) = g(x) olacak ³ekilde
bir H : X × I −→ Y sürekli dönü³ümü varsa f dönü³ümü g dönü³ümüne
homotoptur ve H ye homotopi dönü³ümü denir.
x0 ,x1 ∈ X noktalar için f (0) = x0 ve f (1) = x1 olacak ³ekilde
f : I −→ X sürekli dönü³üm varsa, f ye x0 dan x1 e giden bir yol denir.
Tanm 4.0.7.
bir
Örnek 4.0.16. A³a§daki dönü³ümler birer yoldur:
f : I −→ S 1
t 7→ f (t) = (cos 2πt, sin 2πt)
g : I −→ R2
t 7→ g(t) = (t, t2 )
h : I −→ R2
t 7→ h(t) = (cos 2πt, 2 sin 2πt)
f, g : I −→ X , ba³langç noktalar f (0) = g(0) = x0 ve biti³
f (1)=g(1) = x1 olan iki yol olsun. H(s, 0) = f (s), H(s, 1) = g(s),
H(0, t) = x0 ve H(1, t) = x1 olacak ³ekilde bir H : I × I −→ X sürekli
dönü³ümü varsa f ve g ye yol homotopik dönü³ümler denir ve f 'p g
Tanm 4.0.8.
noktalar
ile gösterilir.
24
Lemma 4.0.2.
spat:
1.
'
'p
ve
'
ba§ntlar birer denklik ba§ntsdr.
ba§ntsnn denklik ba§nts oldu§unu gösterelim.
' ba§nts yansmaldr:
f : X −→ Y sürekli dönü³üm olsun. O zaman;
H : X × I −→ Y, H (x,t)=f (x) dönü³ümü de süreklidir. Ayrca
H(x, 0) = f (x) ve H(x, 1) = f (x) ko³ullar sa§lanr. Buradan f ' f
dir.
2.
' ba§nts simetriktir:
f ' g olsun. O zaman;
H(x, 0) = f (x), H(x, 1) = g(x)
H : X × I −→ Y sürekli dönü³ümü vardr.
F : X × I −→ Y , F (x, t) = H(x, 1 − t) sürekli dönü³ümünü
olacak ³ekilde
tanmla-
yalm.
F (x, 0) = H(x, 1) = g(x) ve F (x, 1) = H(x, 0) = f (x)
sa§land§ için ve
3.
H
sürekli oldu§undan
F
' ba§nts geçi³melidir: h, g, f : X −→ Y
f ' g ve g ' h olsun. O zaman
H(x, 0) = f (x),
olacak ³ekilde
H : X × I −→ Y
de süreklidir ve
g'f
dir.
sürekli dönü³ümler olsunlar.
H(x, 1) = g(x)
sürekli dönü³ümü ve
G(x, 0) = g(x), G(x, 1) = h(x)
olacak ³ekilde
G : X × I −→ Y
sürekli dönü³ümü vardr.
K : X × I −→ Y,
K(x, t) =
H(x, 2t),
G(x, 2t − 1),
0 ≤ t ≤ 1/2
1/2 ≤ t ≤ 1
K(x, 0) = H(x, 0) = f (x) ve K(x, 1) =
G(x, 1) = h(x) ³artlar sa§lanr. Ayrca H ve G sürekli oldu§u için Pasting Lemma dan K dönü³ümü de süreklidir. Böylece f ' h dir.
sürekli dönü³ümünü tanmlayalm.
25
Örnek 4.0.17.
f, g : X −→ R2
sürekli dönü³ümlerini göz önüne alalm.
Bunlar homotop dönü³ümler midir?
H : X × I −→ R2 ,t ∈ I
Çözüm:
t.g(x)
olmak üzere
dönü³ümlerini göz önüne alalm.
H(x, t) = (1 − t).f (x) +
2
R de sürekli dönü³ümlerin toplam
H süreklidir ve H(x, 0) = f (x), H(x, 1) = g(x)
f ' g dir.
ve çarpm sürekli oldu§undan
³artlarn sa§lar. Buna göre
Tanm 4.0.9.
arasndaki
∗
X
de
f (1) = g(0)
(f ∗ g)(s) =
f
özellikli iki yol
f, g : I −→ X
olsun.
f (2s),
g(2s − 1),
dönü³ümünün homotopi snfn
Teorem 4.0.6.
∗
[f ]
ile gösteririz.
[f ∗ g] = [f ] ∗ [g]
g
dir.
i³lemi a³a§daki özellikleri sa§lar:
∗
2.
∗ i³leminin birle³me özelli§i vardr:
([f ] ∗ [g]) ∗ [h] = [f ] ∗ ([g] ∗ [h]) .
3.
∗ i³leminde birim eleman vardr fakat tek de§ildir:
ex0 , ex1 : I −→ X sabit yol ve f : I −→ X ,f (0) = x0 , f (1) = x1
bir yol olsun. [f ] = [f ] ∗ [ex1 ] ,
[ex0 ] ∗ [f ] = [f ].
i³lemi, yol homotopi snar üzerinde iyi tanmldr.
∗ i³lemine göre
bir [f ] elemannn ters
f ∗ [f ] = [ex1 ].
[ex0 ] = [f ] ∗ f ,
Ayrca
ile
0 ≤ t ≤ 1/2
1/2 ≤ t ≤ 1
1.
4.
f
i³lemini ³u ³ekilde tanmlarz:
∗
özellikli
elemanlar vardr:
i³lemi bu özellikleri sa§lad§ndan yol homotopi snar üzerinde
gruboid yaps olu³turur.
spat:
1.
f1 ' g1
ve
f2 ' g2
f1 ' g1
oldu§undan
yan bir sürekli
f 2 ' g2
olsun. Bu durumda
H(x, 0) = f1 (x), H(x, 1) = g1 (x)
H : I × I −→ X dönü³ümü vardr.
ko³ullarn sa§la-
G(x, 0) = f2 (x), G(x, 1) = g2
G : I × I −→ X dönü³ümü vardr.
ko³ullarn sa§la-
oldu§undan
yan bir sürekli
f1 ∗ f2 ' g1 ∗ g2 :
26
f1 ∗ f2 ' g1 ∗ g2 oldu§unu göstermek için F (x, 0) = f1 ∗
f2 , F (x, 1) = g1 ∗ g2 ko³ullarn sa§layan bir F : I × I −→ X sürekli
dönü³ümü bulmalyz. H ve G dönü³ümlerinden yararlanarak F dön-
O halde
ü³ümünü olu³turalm.
H(2x, t)
Tanmlad§mz
1
x ∈ [0, ]
2
F (x, t) =
1
G(2x − 1, t) x ∈ [ , 1]
2
F dönü³ümü pasting lemma ve H ve G
dönü³ümleri-
nin süreklili§inden dolay süreklidir. stenilen ko³ullar da sa§lad§ndan
dolay
2.
∗
i³lemi yol homotopi dönü³ümleri üzerinde iyi tanmldr.
[f ] ∗ ([g] ∗ [h]) = ([f ] ∗ [g]) ∗ [h] oldu§unu göstermeliyiz. Bu durumda
f ∗ (g ∗ h) ' (f ∗ g) ∗ h oldu§unu göstermeliyiz.
t+1
4s
)
s ∈ [0,
]
f(
4
t+1
t+1 t+2
H : I × I −→ X, H(s, t) = g(4s − t − 1) s ∈ [
,
]
4
4
h( 4s − t − 2 ) s ∈ [ t + 2 , 1]
2−t
4
f, h, g
³eklinde tanmlad§mz dönü³üm
sürekli oldu§undan ve pasting
lemmadan dolay süreklidir.
f (4s)
H(s, 0) = g(4s − 1)
h(2s − 1)
f (2s)
H(s, 1) = g(4s − 2)
h(4s − 3)
O halde
s ∈ [0, 1/4]
s ∈ [1/4, 1/2] , H(s, 0) = (f ∗ g) ∗ h(s)
s ∈ [1/2, 1]
s ∈ [0, 1/2]
s ∈ [1/2, 3/4] , H(s, 1) = f ∗ (g ∗ h)(s)
s ∈ [3/4, 1]
f ∗ (g ∗ h) 'p (f ∗ g) ∗ h
dir. Yani
vardr.
3.
[f ] = [f ] ∗ [ex1 ] ⇔ f 'p f ∗ ex1
?
27
∗
i³leminin birle³me özelli§i
2−t
2s
f (
) s ∈ [0,
]
2−t
2
H : I × I −→ X, H(s, t) =
2−t
x1
s∈[
, 1]
2
H dönü³ümü pasting lemma ve f ile sabit dönü³ümün süreklili§inden
dolay süreklidir ve H(s, 0) = f (s), H(s, 1) = f ∗ ex1 oldu§undan [f ] =
[f ] ∗ [ex1 ] dir.
Benzer ³ekilde di§er birim elemann varl§ da gösterilebilir.
4.
[f ] ∗ [f ] = [ex0 ] ⇔ f ∗ f 'p ex0
?
28
f : I −→ X , f (t) = f (1 − t)
³eklinde tanmldr.
(
f (2ts)
s ∈ [0, 1/2]
H : I × I −→ X, H(s, t) =
f (2t(1 − s)) s ∈ [1/2, 1]
³eklinde tanmlad§mz
ve
H(s, 0) = f (0) = ex0
H dönü³ümü f sürekli oldu§undan süreklidir
H(s, 1) = f ∗f (s) oldu§undan [f ]∗[f ] = [ex0 ]
ve
dir.
Benzer ³ekilde di§er ters eleman da gösterilebilir.
f, f 0 : X −→ Y ve g, g 0 : Y −→ Z
g ' g 0 olsun. O halde g ◦ f ' g 0 ◦ f 0 dür.
Lemma 4.0.3.
f 'f
0
ve
sürekli dönü³ümler ve
f ' f 0 oldu§undan F : X ×I −→ Y sürekli dönü³ümü F (x, 0) = f (x),
F (x, 1) = f 0 (x) ko³ullarn sa§lar. g ' g 0 oldu§undan H : Y ×I −→ Z sürekli
0
0
0
dönü³ümü H(x, 0) = g(x), H(x, 1) = g (x) ko³ullarn sa§lar. g ◦ f ' g ◦ f
oldu§unu göstermek için ' ba§ntsnn denklik ba§nts oldu§undan yarar0
0
0
0
0
0
lanaca§z. g ◦ f ' g ◦ f ve g ◦ f ' g ◦ f oldu§unu gösterirsek g ◦ f ' g ◦ f
spat:
oldu§unu göstermi³ oluruz.
29
g
/Y
/Z
• X ×I
G : X × I −→ Z, G(x, t) = g ◦ F (x, t) ³eklinde tanmlanan dönü³üm F
ve g sürekli oldu§undan süreklidir. G(x, 0) = g ◦ F (x, 0) = g ◦ f (x) ve
G(x, 1) = g ◦ F (x, 1) = g ◦ f 0 (x) oldu§undan g ◦ f ' g ◦ f 0 dir.
F
f 0 ×1
/Y ×I
/Z
• X ×I
0
G ◦ (f × 1) : X × I −→ Z sürekli dönü³ümü G ◦ (f 0 × 1)(x, 0) = g ◦ f 0 (x)
0
0
0
0
0
0
ve G◦(f ×1)(x, 1) = g ◦f (x) ko³ullarn da sa§lad§ndan g◦f ' g ◦f
G
dir.
O halde
g ◦ f ' g0 ◦ f 0
dir.
30
ALITIRMALAR
1)
h, h0 : X −→ Y
homotopik ve
k, k 0 : Y −→ Z
homotopik ise,
k ◦ h ve k 0 ◦ h0
homotopiktir. Gösteriniz.
2) Bir
X
uzaynn birim dönü³ümü, sabit dönü³üme homotop ise,
X
uza-
yna büzülebilirdir denir.
a)
I = [0, 1]
ve
R
nin büzülebilir oldu§unu gösteriniz.
b) Büzülebilir uzaylar yol ba§lantldr. Gösteriniz.
3)
X , Rn
de konveks bir küme olsun.
X
de ayn uç noktalara sahip iki yolun
yol homotop oldu§unu gösteriniz.
4)
X
Y ye dönü³ümlerin homotopi snarnn kümesi [X, Y ]
a) I = [0, 1] [X, I] tek elemanldr. Gösteriniz.
b) Y yol ba§lantl ise [I, Y ] tek elemanldr. Gösteriniz.
den
31
olsun.
Bölüm 5
TEMEL GRUPLAR
Tanm 5.0.10.
eren
x0
X
X
topolojik uzay ve
x0 ∈ X
olsun.
x0
da ba³layp
x0
da sona
deki yollara kapal yol (loop) denir.
tabanl kapal yollarn homotopi snf
∗
i³lemi altnda bir grup te³kil eder.
Bu gruba temel grup ya da 1. homotopi grubu denir.
Örnek 5.0.18.
X=R
olmak üzere
X
in temel grubu nedir?
Çözüm: f , x0 da kapal yol olsun. π1 (R, x0 ) = {[g] : g ' f, f, g : I →
Xf (0) = g(0) = x0 , f (1) = g(1) = x1 } H : I × I :→ R, H(s, t) =
(1 − t).f (s) + t.ex0 (s) sürekli dönü³ümünü tanmlayalm. g = ex0 alnrsa
π1 (R, x0 ) = {[e0 ]} = {0} a³ikar gruptur.
Örnek 5.0.19.
X
Örnek 5.0.20.
X =D 2
Örnek 5.0.21.
X ={∗}
Örnek 5.0.22.
X =[0, 1]
Tanm 5.0.11.
α, X
konveks uzay olsun.
(Disk) olsun.
olsun.
olsun.
π1 (X, x0 ) = {[ex0 ]}.
π1 (X, x0 )={[ex0 ]}.
π1 (X, x0 )={[ex0 ]}.
π1 (X, x0 )={[ex0 ]}.
topolojik uzaynda
x0
dan
x1
e giden bir yol olsun.
α
b : π1 (X, x0 ) −→ π1 (X, x1 )
[f ] 7→ α
b([f ]) = [α] ∗ [f ] ∗ [α]
³eklinde dönü³üm tanmlansn.
32
α
b iyi tanmldr.
α
b homomorzmdir.
iii) α
b bijektiftir.
i)
ii)
spat: i)
α
b
iyi tanmldr:
[f ] = [g] ⇒ α
b([f ]) = α
b([g])?
[f ] = [g] ⇒ f 'p g ⇒ α ∗ f 'p α ∗ g
⇒ α ∗ f ∗ α 'p α ∗ g ∗ α
⇒ [α] ∗ [f ] ∗ [α] 'p [α] ∗ [g] ∗ [α]
⇒α
b([f ]) = α
b([g])
ii)
α
b
homomorzmdir:
[f ] ∗ [g] = [f ∗ g]
α
b([f ] ∗ [g]) = α
b([f ]) ∗ α
b([g])?
oldu§unu biliyoruz.
α
b([f ] ∗ [g]) = α
b([f ∗ g]) = [ᾱ] ∗ [f ∗ g] ∗ [α] = [ᾱ] ∗ [f ] ∗ [g] ∗ [α]
= [ᾱ] ∗ [f ] ∗ [α] ∗ [ᾱ] ∗ [g] ∗ [α]
=α
b([f ]) ∗ α
b([g])
Böylece
iii)
α
b
α
b
homomorzmadr.
bijektiftir:
βb : π1 (X, x1 ) −→ π1 (X, x0 )
b
[h] 7→ β([h])
= [β̄] ∗ [h] ∗ [β]
³eklinde tanmlansn.
β : I → X , her t ∈ I
için
β(t) = α(1 − t) = α(t) alalm.
Bu durumda
b
β([h])
= [α] ∗ [h] ∗ [α].
A³a§daki iki durum mevcut ise
α
b
bijektiftir:
βb ◦ α
b = 1π1 (X,x0 ) ⇔ α
b injektif
b
α
b ◦ β = 1π1 (X,x1 ) ⇔ α
b surjektif
33
b
b α([f ]) = β(b
b α[f ]) = β([α]∗[f
b
]∗[α]) = β([α∗f
∗α]) = [α]∗[α]∗[f ]∗[α]∗[α]
β◦b
= [ex0 ] ∗ [f ] ∗ [ex0 ] = [f ] ∗ [ex0 ] = [f ] = 1π1 (X,x0 )
Böylece
α
b
injektiftir.
b
b
α
b ◦ β([g])
=α
b(β[g])
=α
b([β̄ ∗ g ∗ β]) = [ᾱ ∗ β̄ ∗ g ∗ β ∗ α] = [e ∗ g ∗ e] =
[g] = 1π1 (X,x1 ) ([g])
α
b
Dolaysyla
Sonuç olarak
α
b
surjektiftir.
bir izomorzmdir.
Bu durumda a³a§daki teoremi elde ederiz;
Teorem 5.0.7.
Sonuç 5.0.3.
α
b : π1 (X, x0 ) −→ π1 (X, x1 )
X
yol ba§lantl uzay ve
izomorzmdir.
x0 , x1 ∈ X
olsun. O zaman
π1 (X, x0 ) ∼
= π1 (X, x1 ).
Tanm 5.0.12.
ise
X
π1 (X, x0 ) = {ex0 }
R
basit ba§lantldr; çünkü
R
yol ba§lantldr ve
π1 (R, r0 ) =
dr.
Örnek 5.0.24.
{ed0 }
D2 basit ba§lantldr; çünkü D2 yol ba§lantldr ve π1 (D2 , d0 ) =
dr.
Örnek 5.0.25.
{e∗ }
topolojik uzay ve yol ba§lantl olsun.
e basit ba§lantl uzay denir.
Örnek 5.0.23.
{er0 }
X
{∗} basit ba§lantldr; çünkü {∗} yol ba§lantldr ve π1 ({∗}, ∗) =
dr.
Lemma 5.0.4. Basit ba§lantl
X
uzaynda ba³langç ve biti³ noktalar ayn
olan iki yol, yol homotoptur.
spat:
α
ve
β , x0
dan
x1
e giden iki yol olsun.
α ∗ β , X uzaynn x0 noktasnda
π1 (X, x0 ) = {ex0 } dir.
α 'p β ?
bir looptur.
X
uzay basit ba§lantl ol-
du§undan
[α ∗ β] = [ex0 ] ⇔ α ∗ β 'p ex0
α 'p α ∗ ex1 'p α ∗ β ∗ β 'p (α ∗ β) ∗ β 'p ex0 ∗ β 'p β ⇒ α 'p β ⇔
[α] = [β].
34
Tanm 5.0.13.
X , x0
h : (X, x0 ) −→ (Y, y0 ) bir sürekli dönü³üm olsun. f : I −→
h ◦ f , Y de y0 bazl bir looptur.
bazl bir loop ise, bu durumda
Tanm 5.0.14.
h : (X, x0 ) −→ (Y, y0 )
bir sürekli dönü³üm olsun.
h∗ : π1 (X, x0 ) −→ π1 (Y, y0 )
[f ] 7→ h∗ ([f ]) = [h ◦ f ]
³eklinde tanmlanan dönü³üme
h tarafndan olu³turulan homomorzma
ya da indirgenmi³ homomorzma denir.
• h∗ dönü³ümü iyi tanmldr:
[f ] = [g] ⇒ f 'p g ⇒ h ◦ f 'p h ◦ g ⇒ h∗ ([f ]) = h∗ ([g])
• h∗ homomorzmdir:
h∗ ([f ] ∗ [g]) = [h ◦ (f ∗ g)] = [h ◦ f ] ∗ [h ◦ g] = h∗ ([f ]) ∗ h∗ ([g])
Teorem 5.0.8.
h : (X, x0 ) −→ (Y, y0 )
ve
k : (Y, y0 ) −→ (Z, z0 )
iki sürekli
dönü³üm olsun.
1) (k ◦ h)∗ = k∗ ◦ h∗
2) 1X : X, x0 ) −→ (X, x0 )
birim dönü³üm ise,
(1X )∗
birim homomor-
zmdir.
spat: 1)
h : (X, x0 ) −→ (Y, y0 )
ve
k : (Y, y0 ) −→ (Z, z0 )
iki sürekli dö-
h∗ :
[f ] ∈ π1 (X, x0 )
nü³üm olsun. Bu iki dönü³ümün üretti§i indirgenmi³ homomorzmler
π1 (X, x0 ) −→ π1 (Y, y0 )
ve
k∗ : π1 (Y, y0 ) −→ π1 (Z, z0 )
dir.
herhangi bir loop olsun.
(k ◦ h)∗ ([f ]) = [(k ◦ h) ◦ f ] = [k ◦ h ◦ f ] (i)
k∗ ◦ h∗ ([f ]) = k∗ (h ◦ f ) = [k ◦ (h ◦ f )] = [k ◦ h ◦ f ]
(ii)
(i) ve (ii)den istenen e³itlik elde edilir.
2)
(1X )∗ ([f ]) = [1X ◦ f ] = [f ]
Sonuç 5.0.4.
homomorzm
oldu§undan
(1X )∗
birim homomorzmdir.
h : (X, x0 ) −→ (Y, y0 ) bir homeomorzm ise, h
h∗ : π1 (X, x0 ) −→ π1 (Y, y0 ) izomorzmdir.
h : (X, x0 ) −→ (Y, y0 ) bir homeomorzm olsun. O zaman k ◦ h = 1X
h ◦ k = 1Y olacak ³ekilde k : (Y, y0 ) −→ (X, x0 ) sürekli dönü³ümu vardr.
spat:
ve
nin indirgedi§i
Teoremden
(h ◦ k)∗ = 1Y ⇒ h∗ ◦ k∗ = (1Y )∗ ⇒ h∗ surjektif
(k ◦ h)∗ = (1X )∗ ⇒ k∗ ◦ h∗ = (1X )∗ ⇒ h∗ injektif
O halde
h∗
bijektif homomorzm oldu§undan izomorzmdir.
35
ALITIRMALAR
A ⊂ X ve r : X −→ A bir retraksiyon olsun. Verilen bir a0 ∈ A için r∗ :
π1 (X, x0 ) −→ π1 (A, a0 ) dönü³ümünün surjektif oldu§unu gösteriniz. [pucu:
j : A −→ X kapsama dönü³ümünü göz önüne alnz.]
1)
36
Bölüm 6
ÖRTÜLÜ UZAYLAR
Tanm 6.0.15.
p : E −→ B
örten, sürekli bir dönü³üm ve
olsun. A³a§daki özellikler mevcut ise,
B
nin
U
aç§
p
U ⊂B
de açk
tarafndan düzgün
örtülüyor denir:
p−1 (U ) = ∪α∈I Vα , (α 6= β için Vα 6= Vβ , Vα ⊂ E açk )
ii) Her α için p |Vα : Vα −→ U bir homeomorzmdir. (p ye
i)
yerel homeomorf-
izm denir.)
Not 6.0.2. Bir dönü³üm homeomorzm ise yerel homeomorzmdir, fakat
tersi genelde do§ru de§ildir.
p : E −→ B örten ve sürekli bir dönü³üm olsun. B uzayna
U açk kom³ulu§u p tarafndan düzgün örtülüyorsa, p ye
dönü³üm ve E ye de B nin örtü uzay denir.
Tanm 6.0.16.
ait her noktann
örtülü
Örnek 6.0.26. A³a§daki ³ekilde tanmlanan
p : R −→ S 1
t 7→ p(t) = e2πit = (cos2πt, sin2πt)
dönü³ümü, örtülü dönü³ümdür.
p nin identikasyon dönü³ümü oldu§unu biliyoruz. O halde p örten
Çözüm:
ve süreklidir.
imdi
i)
S1
∀b ∈ S 1
in düzgün örtülü olup olmad§n inceleyelim:
için
α 6= β
iken
Vα ∩ Vβ = ∅
37
olmak üzere
p−1 (U ) = ∪α∈I Vα ?
p−1 ((1, 0)) = Z dir. (1, 0) noktasnn bir U kom³ulu§unu alalm. (1, 0) ∈ U ⊂
S 1 de açk olsun. Vα = (α − 14 , α + 41 ) alalm. α ∈ Z olmak üzere α 6= β iken
Vα ∩ Vβ = ∅ oldu§undan ve Vα lar p−1 (U ) yu örttü§ünden, p−1 (U ) = ∪α∈Z Vα
dr.
ii)
p |Vα : Vα −→ U
homeomorzm midir?
Vα = (α − 41 , α + 14 ) ⊂ R
• p
de açk olmak üzere
p |Vα
örten oldu§undan
da örtendir.
• t1 6= t2 olmak üzere ∀t1 , t2 ∈ Vα için
cos2πt1 6= cos2πt2 ∧ sin2πt1 6= sin2πt2 ⇒ p |Vα (t1 ) 6= p |Vα (t2 )
oldu§undan p |Vα bire birdir.
• p
sürekli oldu§undan
• (p |Vα )−1 : U −→ Vα
O halde
p
p |Vα
süreklidir.
süreklidir, çünkü
p |Vα
açk dönü³ümdür.
örtülü dönü³ümdür.
Örnek 6.0.27. Her homeomorzm bir örtülü dönü³ümdür.
Çözüm:
p : X −→ Y
bir homeomorzm olsun. Bu durumda
p
örten ve
süreklidir.
i) Süreklilikten dolay
ii)
p
U ⊂Y
açk için
homeomorzm oldu§undan
O halde inceledi§imiz
Örnek 6.0.28.
Çözüm:
1X
x 7→ x
p
p |Vα
p−1 (U ) = V ⊂ X
açktr.
homeomorzmdir.
homeomorzmi örtülü dönü³ümdür.
birim dönü³ümü bir örtülü dönü³ümdür.
ile tanmlanan
1X : X −→ X
birim dönü³üm oldu§undan
örtenlik ve süreklilik mevcuttur.
U = Vα alrssak p−1 (U ) = U = Vα
ii) p |U : U −→ U homeomorzmdir.
i)
O halde
1X
dr.
örtülü dönü³ümdür.
Örnek 6.0.29.
E = X × {0, 1, 2, 3, ...}
örtülü dönü³ümdür.
38
ve
B=X
olmak üzere
p : E −→ B
Çözüm:
• ∀x ∈ X için (x, 0) ∈ X × {0, 1, 2, 3, ...}
p örtendir.
• U ⊂B =X
de açk olsun.
öyle ki
p(x, 0) = x
+
p−1 (U ) = U × Z ⊂ E
oldu§undan
açk oldu§undan
p
süreklidir.
p−1 (U ) = ∪α∈Z+ U × α ayrk birle³imine e³ittir.
ii) p |Vα : Vα −→ U ; p |Vα : U × α −→ U homeomorzmdir.
i)
O halde
p
örtülü dönü³ümdür.
Örnek 6.0.30.
p : S 2 −→ RP 2 , p(z) = [z]
ile tanmlanan bölüm dönü³ümü
örtülü dönü³ümdür.
Örnek 6.0.31.
p : R+ −→ S
1
,
p(t) = (cos2πt, sin2πt)
örtülü dönü³üm
de§ildir.
Tanm 6.0.17.
dönü³üm olsun.
f
p : E −→ B bir dönü³üm ve f : X −→ B bir sürekli
e
p ◦ fe = f olacak ³ekilde fe : X −→ E dönü³ümu varsa, fe ya
nin yükseltilmi³i (liftingi) denir.
Örnek 6.0.32.
p
ve
f
dönü³ümleri
p : R −→ S 1
t 7→ p(t) = (cos2πt, sin2πt)
f : [0, 1] −→ S 1
t 7→ f (t) = (cosπt, sinπt)
olarak tanmland§nda
dönü³ümü
f
fe : [0, 1] −→ R, t 7→ fe(t) =
t
ile tanmlanan
2
fe
nin yükseltilmi³idir.
p ◦ fe(t) = p(fe(t)) = p( 2t ) = (cosπt, sinπt) = f (t)
Örnek 6.0.33.
p
ve
g
dönü³ümleri
p : R −→ S 1
t 7→ p(t) = (cos2πt, sin2πt)
g : [0, 1] −→ S 1
t 7→ g(t) = (cosπt, −sinπt)
olarak tanmland§nda
dönü³ümü
g
ge : [0, 1] −→ R, t 7→ ge(t) = − 2t
ile tanmlanan
nin yükseltilmi³idir.
p ◦ ge(t) = p(e
g (t)) = p(− 2t ) = (cosπt, −sinπt) = g(t)
39
ge
Örnek 6.0.34.
p
ve
h
dönü³ümleri
p : R −→ S 1
t 7→ p(t) = (cos2πt, sin2πt)
h : [0, 1] −→ S 1
t 7→ h(t) = (cos4πt, sin4πt)
olarak tanmland§nda
dönü³ümü
h
e
h : [0, 1] −→ R, t 7→ e
h(t) = 2t
ile tanmlanan
e
h
nin yükseltilmi³idir.
p◦e
h(t) = p(e
h(t)) = p(2t) = (cos4πt, sin4πt) = h(t)
p : (E, e0 ) −→ (B, b0 ) örtülü dönü³üm olsun. B uzaynda
b0 noktasnda ba³layan f : [0, 1] −→ B yolunun, E uzaynda e0 noktasnda
e : [0, 1] −→ E yükseltilmi³i vardr.
ba³layan bir tek f
Lemma 6.0.5.
p : (E, e0 ) −→ (B, b0 ) örtülü dönü³üm olsun. F : I×I −→ B ,
F (0, 0) = b0 özellikli sürekli bir dönü³üm olsun. O zaman Fe(0, 0) = e0 olacak
e : I × I −→ E yükseltilmi³i vardr. Ayrca F homotopi
³ekilde F nin bir tek F
e da homotopi dönü³ümudur.
dönü³ümu ise, F
Lemma 6.0.6.
p : (E, e0 ) −→ (B, b0 ) örtülü dönü³üm; f ve g B uzayna b0
e ve ge srasyla f ve g nin yükseltilmi³leri ve ba³langç
dan b1 e giden iki yol; f
e
noktalar f (0) = e0 = g
e(0) olsun. f yolu g yoluna homotop ise, fe yolu ge
Teorem 6.0.9.
yoluna homotoptur.
40
ALITIRMALAR
1)
p : S 1 −→ S 1
z 7→ z n
örtülü dönü³ümdür. Gösteriniz.
p : E −→ B ve p : E 0 −→ B 0 örtülü
B × B 0 örtülü dönü³ümdür. Gösteriniz.
2)
dönü³ümler ise,
p × p0 : E × E 0 −→
p : E −→ B örtülü dönü³üm ve B ba§lantl olsun. Bir b0 ∈ B
p (b0 ) k elemanl ise, ∀b ∈ B için p−1 (b) k elemanldr. Gösteriniz.
3)
için
−1
p : E −→ B örtülü dönü³üm, B ba§lantl ve yerel ba§lantl olsun. C ,
E nin bir bile³eni ise p |C : C −→ B örtülü dönü³ümdür. Gösteriniz.
4)
5)
B
basit ba§lantl ve
dönü³üm ise,
6)
p
E
yol ba§lantl olmak üzere
p : E −→ B
örtülü
bir homeomorzmadr. Gösteriniz.
p : R −→ S 1
nullhomotop ise,
örtülü dönü³üm ve
f
f : X −→ S 1
bir dönü³üm olsun.
f
nin yükseltilmi³inin var oldu§unu gösteriniz.
p : E −→ B bir örtülü dönü³üm olsun. α(1) = β(0) olmak üzere α :
e
I −→ B ve β : I −→ B , B de sürekli iki yol olsun. α
e(1) = β(0)
olmak üzere
e
e
α
e ve β srasyla α ve β nn yükseltilmi³i olsun. α
e ∗ β , α∗β nn yükseltilmi³idir.
7)
Gösteriniz.
8)
B 2 , R2
de birim disk olmak üzere
B2
den
S1
e tanml bir retraksiyon
dönü³ümünün var olmad§n gösteriniz.
p : E −→ B bir örtülü dönü³üm, p(e0 ) = b0 ve E
p∗ : (π1 )(E, e0 ) −→ π1 (B, b0 ) injektiftir. Gösteriniz.
9)
41
yol ba§lantl olsun.
Bölüm 7
ÇEMBERN TEMEL GRUBU
Tanm 7.0.18.
sun.
f
p : E −→ B
bir dönü³üm ve
f : X −→ B
sürekli dönü³üm ol-
in yükseltilmi³i a³a§daki diyagram de§i³meli klan bir
fe : X −→ B
sürekli dönü³ümdür.
p ◦ fe = f
XA
fe
E
AA f
AA
AA
/B
p
Örnek 7.0.35. A³a§daki gibi tanmlanan
p : R −→ S 1
;
t 7→ p(t) = (cos(2πt), sin(2πt))
e= f
dönü³ümleri sürekli olmak üzere p ◦ f
Çözüm:
f
f : [0, 1] −→ S 1
t 7→ f (t) = (cos(πt), sin(πt))
e mevcut mudur?
olacak ³ekilde f
nin yükseltilmi³i
fe : [0, 1] −→ R
t 7→ fe(t) =
t
2
olsun. Bu durumda
(p ◦ fe)(t) = p(fe(t)) = p( 2t ) = (cos(πt), sin(πt)) = f (t)
Örnek 7.0.36. A³a§daki gibi tanmlanan
q : [0, 1] −→ S 1
;
p : R −→ S 1
t 7→ q(t) = (cos(πt), − sin(πt))
t 7→ p(t) = (cos(2πt), sin(2πt))
dönü³ümleri sürekli olmak üzere q nin yükseltilmi³i var mdr?
42
Çözüm:
qe : [0, 1] −→ R
t 7→ qe(t) = − 2t
ile dönü³ümü tanmlayalm. Bu durumda
(p ◦ qe)(t) = (cos(πt), − sin(πt)) = q(t)
oldu§undan
qe, q
Lemma 7.0.7.
nun yükseltilmi³idir.
Lifting Lemma: p : E −→ B
örtülü dönü³üm ve
b0 olsun. b0 da ba³layan f : [0, 1] −→ B yolunun e0
fe : [0, 1] −→ E yükseltilmi³ dönü³ümü vardr.
Lemma 7.0.8.
f (e0 ) =
da ba³layan bir tek
Covering Homotopy Lemma: p : E −→ B
örtülü dön-
f (e0 ) = b0 olsun.F (0, 0) = b0 olacak ³ekilde F : I × I −→ B sürekli
e(0, 0) = e0 olacak ³ekilde Fe : I × I −→ E sürekli döndönü³ümü varsa F
ü³üm ve
ü³ümü vardr.
E§er
F
homotopi dönü³ümü ise
Fe
de homotopi dönü³ümüdür.
p : E −→ B örtülü dönü³üm, p(e0 ) = b0 ; f, g b0 dan bi ye
e, ge (ba³langç noktalar e0 ) f ve g nin yükseltilmi³i
giden B de iki yol ve f
e da ge ya yol homotoptur.
olsun: f , g ye yol homotop ise f
Teorem 7.0.10.
f ve g yollar arasndaki homotopi dönü³ümü F : I × I −→ B ,
F (0, 0) = b0 olsun. Fe(0, 0) = e0 olacak ³ekilde bir Fe : I × I −→ E yükseltilmi³i vardr. Lemmann ikinci ksmndan F : I × I −→ B homotop dönü³üm
e : I × I −→ E homotop dönü³ümdür.
oldu§undan F
spat:
Fe({0} × I) = e0
Fe({1} × I) = e1
Fe/I × {0} = Fe(s, 0): e0
Fe(0, t) = e0
Fe(1, t) = e1
noktasnda ba³layan
E
de bir yoldur.
Fe(s, 0) = fe(s)
Fe/I × {1} = Fe(s, 1): e0
da ba³layan
E
de bir yol.
Fe(s, 1) = ge(s)
43
O halde
fe ' ge
SONUÇ:
p : E −→ B
örtülü dönü³üm ise
p0 : π1 (E, e0 ) −→ π1 (B, b0 )
monomorzmadr.
p ◦ ([fe]) = p ◦ ([e
g ])
e
[f ] = [e
g]
Teorem 7.0.11.
E
p : E −→ B
basit ba§lantl ise, bu durumda
E
fe yolu
vardr. Bu durumda
tanmdan
E
p(e0 ) = b0 olsun. E§er
φ : π1 (B, b0 ) −→ π1 (E, e0 ) örtendir. E§er E
φ bijektiftir.
bir örtülü dönü³üm ve
yol ba§lantl ise, bu takdirde
spat:
p ◦ fe = p ◦ ge
f =g
fe ' ge ⇒ [fe] = [e
g]
e1 ∈ p−1 (b0 ) için E de e0 dan e1 e bir
f = p ◦ fe, B nin b0 noktasnda bir looptur, ve
yol ba§lantl ise, verilen bir
φ([f ]) = e1 .
[f ] ve [g], φ([f ]) = φ([g])
e
olacak ³ekilde π1 (B, b0 ) nin iki eleman olsun. f ve g
e, E de e0 da ba³layan
e
srasyla f ve g nin yükseltilmi³leri oldu§undan, f (1) = g
e(1) dir. E basit
e ve ge arasnda bir Fe yol homotopi dönü³ümü
ba§lantl oldu§undan, E de f
vardr. Buna göre p◦F , B de f ve g arasnda bir yol homotopi dönü³ümüdür.
nin basit ba§lantl oldu§unu kabul edelim.
Teorem 7.0.12.
spat:
π1 (S 1 , b0 ) ∼
= (Z, +)
p : R −→ S 1 , f : R −→ S 1
ve
fe : R −→ R, f
nin yükseltilmi³i olmak
üzere
φ : π1 (S 1 , b0 ) −→ (Z, +)
[f ] 7→ φ([f ]) = n = fe(1)
φ
1) φ
izomorzmadr:
iyi tanmldr:
[f ] = [g] ⇒ f ' g ⇒ fe ' ge ⇒ fe(1) ' ge(1) ⇒ φ([f ]) = φ([g])
2) φ homomorzmadr:
f ve g π1 (S, b0 ) da birer
ge(1) = m
loop ve yükseltilmi³leri
44
fe
ve
ge
olsun.
fe(1) = n,
h(s) =
fe(2s),
s ∈ [0, 1/2]
n + ge(2s − 1), s ∈ [1/2, 1]
p : R −→ S 1
t 7→ p(t) = (cos(2πt), sin(2πt))
periyodik dönü³ümdür.
p ◦ fe(2s),
s ∈ [0, 1/2]
p(n + ge(2s − 1)), s ∈ [1/2, 1]
f (2s),
s ∈ [0, 1/2]
p ◦ fe(2s),
s ∈ [0, 1/2]
=
=
g(2s − 1), s ∈ [1/2, 1]
p ◦ ge(2s − 1), s ∈ [1/2, 1]
p ◦ h(s) = p(h(s)) =
O halde
h, f ∗ g
nin yükseltilmi³idir.
φ([f ∗ g]) = h(1) = n + m = φ([f ]) + φ([g]).
Böylece
φ
homomorzmadr.
3) φ, 1 − 1 dir: φ([f ]) = φ([g]) = n ⇒ [f ] '? [g]
fe ve ge srasyla f ve g nin yükseltilmi³i olsun. fe(0) = 0, ge(0) = 0, fe(1) =
n, ge(1) = m olsun. R basit ba§lantl oldu§undan fe ' ge, Fe : I × I −→ R
F = p ◦ Fe : I × I −→ B , F = p ◦ Fe f ve g dönü³ümleri arasnda homotopi
dönü³ümleridir.
p ◦ fe ' p ◦ ge ⇒ f ' g ⇒ [f ] = [g]
4) φ
örtendir:
n ∈ p−1 (b0 )
olsun.
p : R −→ S 1
t 7→ p(t) = (cos 2πt, sin 2πt)
fe : [0, 1] −→ R
fe(0) = 0, fe(1) = 1
f : [0, 1] −→ S 1
t 7→ f (t) = p ◦ fe
f (0) = p ◦ fe(0) = p(0) = b0 , f (1) = p ◦ fe(1) = p(n) = b0
O halde
φ
örtendir.
45
Teorem 7.0.13.
p : E −→ B
bir örtülü dönü³üm ve
(a) p∗ : π1 (E, e0 ) −→ π1 (B, b0 )
(b) H = p∗ (π1 (E, e0 )) olsun. φ
lerinin kolleksiyonundan
p(e0 ) = b0
olsun.
homomorzmi bir monomorzmdir.
H n sa§ yan kümeΦ : π1 (B, b0 )/H −→ p−1 (b0 ) injektif
yükseltilmi³ dönü³ümü,
−1
p (b0 ) a bir
E yol ba§lantl ise, bu dönü³üm bijektiftir.
loop ise, [f ] ∈ H olmas için gerek ve yeter
dönü³ümünü üretir. E§er
(c) f , B
nin
E
de
b0
de
e0
bazl bir
³art
f
bazl bir loopa yükseltilmesidir.
spat:
a)
e
h, E
de
e0
bazl bir loop ve
p∗ ([e
h])
birim eleman olsun.
F, p ◦ e
h
ile sabit
e, Fe(0, 0) = e0 olacak ³ekilde F nin
loop arasnda bir yol homotopi olsun. F
E ye yükseltilmi³i ise, bu takdirde Fe e
h ile e0 daki sabit loop arasnda bir yol
homotopidir.
B de f ve g looplar verilsin, fe ve ge da srasyla f ve g nin e0 da ba³lae(1) ve φ([g]) = ge(1).
yan E ye yükseltilmi³leri olsun. Bu durumda φ([f ]) = f
φ([f ]) = φ([g]) olmas için gerek ve yeter ³artn [f ] ∈ H ∗ [g] oldu§unu gösteb)
relim.
[f ] ∈ H ∗ [g] oldu§unu kabul edelim. Bu takdirde E de e0 bazl
bir loop için h = p ◦ e
h olmak üzere [f ] = [h ∗ g] dir. e
h ∗ ge çarpm tanmldr
e ve
ve h ∗ g nin yükseltilmi³idir. [f ] = [h ∗ g] oldu§undan, e0 da ba³layan f
e
e
h ∗ ge yükseltilmi³leri E nin ayn noktasnda bitmelidirler. Bu takdirde fe ve
ge, E nin ayn noktasnda sona erdiklerinden φ([f ]) = φ([g]).
e ve ge, E nin
imdi φ([f ]) = φ([g]) oldu§unu kabul edelim. Bu takdirde f
e ile ge nn tersinin çarpm tanmldr ve E de e0
ayn noktasnda sona erer. f
bazl e
h loopudur. Buradan [e
h ∗ ge] = [fe]dir. Fe, E deki e
h ∗ ge ve fe arasndaki
bir yol homotopi ise, h = p ◦ e
h olmak üzere p ◦ Fe B de h ∗ g ve f arasna bir
yol homotopidir. Böylece [f ] ∈ H ∗ [g] dir.
E yol ba§lantl ise, bu takdirde φ örten oldu§undan Φ de örtendir.
lk olarak
φ([f ]) = φ([g]) olmas için gerek
[f ] ∈ H ∗ [g] olmasdr. g bir sabit loop iken bu sonucu uygularsak, φ([f ]) = e0 olmas için gerek ve yeter ³artn [f ] ∈ H oldu§unu görürüz.
Ancak f nin yükseltilmi³i e0 da ba³layp e0 da bitiyorsa φ([f ]) = e0 dr. Bu
c)
Φ
nin injektif olmas ³u anlama gelir:
ve yeter ³art
da ispat tamamlar.
E basit ba§lantl uzay ve p : (E, e0 ) −→ (B, b0 )
B nin evrensel örtülü uzay denir.
Tanm 7.0.19.
ü³üm ise
E
ye
Lemma 7.0.9.
B
B
p : E −→
takdirde p nin
yol ba§lantl ve lokal yol ba§lantl uzay ve
E0 , E nin bir yol bile³eni
p0 : E0 −→ B de örtülü dönü³ümdür.
örtülü dönü³üm olsun.
kstlan³ olan
46
ise, bu
örtülü dön-
Bölüm 8
DELNM DÜZLEMN TEMEL
GRUBU
x0 ∈ S 1
Teorem 8.0.14.
ve
J : (S 1 , x0 ) −→ (R2 − {0}, x0 )
kapsama dön-
ü³ümü,
J∗ : π1 (S 1 , x0 ) −→ π1 (R2 − {0}, x0
izomorzmasn üretir.
spat:
r : R2 − {0} −→ S 1
x 7→ r(x) =
x
kxk
ile tanmlanan sürekli dönü³ümü alalm.
r∗ : π1 (R2 − {0}, x0 ) −→ π1 (S 1 , x0 )
ve
J∗ : π1 (S 1 , x0 ) −→ π1 (R2 − {0}, x0 )
olmak üzere
r∗ ◦ J∗ = 1π1 (S 1 ,x0 )
ve
J∗ ◦ r∗ = 1π1 (R2 −{0},x0 )
(S 1 , x0 )
J/
dr.
(R2 − {0}, x0 )
r
/ (S 1 , x
0)
• O halde r ◦ J = 1(S 1 ,x0 ) dr. (r ◦ J)∗ = (1(S 1 ,x0 ) )∗ ve r∗ ◦ J∗ = 1π1 (S 1 ,x0 ) .
• (J∗ ◦ r∗ )([f ]) = J∗ (r∗ ([f ])) = J∗ (r ◦ f ) = [J ◦ r ◦ f ] ∈ π1 (R2 − {0}, x0 )
g = J ◦ r ◦ f : I −→ R2 − {0}
(s)
s 7→ g(s) = kff (s)k
47
x0 da bir loop olsun.
f 'p g dir: F : I × I −→ R2 − {0}
(s, t) 7→ F (s, t) = t kff (s)
+ (1 − t)f (s)
(s)k
1.
2.
3.
4.
f, R2 − {0} da loop oldu§undan g da R2 − {0}
f sürekli oldu§undan F süreklidir.
F (s, 0) = f (s), F (s, 1) = g(s)
F (0, t) = x0 , F (1, t) = x0
~ F (s, t) = 0 olursa R2 − {0}
ve f (s) 6= 0 olmaldr.
da looptur.
a ait olamaz. O halde
t
kf (s)k
+ (1 − t) 6= 0
x0 ∈ S n−1 (n ≥ 2), J : (S n−1 , x0 ) −→ (R2 − {0}, x0 )
Teorem 8.0.15.
kap-
sama dönü³ümü,
J∗ : π1 (S n−1 , x0 ) −→ π1 (R2 − {0}, x0 )
izomorzmasn üretir.
π1 (R2 − {0}, x0 ) ∼
= π1 (S n−1 , x0 ) ∼
= (Z, +)
Tanm 8.0.20.
r ◦ i = 1A
A, X
olacak ³ekilde bir
bir retrakt denir ve
i : A −→ X kapsama
r : X −→ A sürekli dönü³ümü
in alt uzay ve
r
dönü³ümü olsun.
varsa
A
ya
X
in
ye retraksiyon denir.
A, X in alt uzay olsun. ∀x ∈ X için H(x, 0) = x ve
H(x, 1) ∈ A, ∀a ∈ A ve ∀t ∈ I için H(a, t) = a olacak ³ekilde bir H :
I × I −→ X sürekli dönü³üm varsa A ya X in güçlü deformasyon ret-
Tanm 8.0.21.
rakt denir.
Örnek 8.0.37.
S 1 , R2 − {0}
n kuvvetli deformasyon retraktdr.
H : R2 − {0} × I −→ R2 − {0}
x
+ (1 − t)x
(x, t) 7→ H(x, t) = t kxk
x
H(x, 0) = x, H(x, 1) = kxk
∈ S1
a
t ∈ I için H(a, t) = t
+(1 − t)a = a
kak
|{z}
• ∀x ∈ R2 − {0}
• ∀a ∈ S 1
ve
için
1
A, X in kuvvetli deformasyon retrakt ve a0 ∈ A olsun.
J : (A, a0 ) −→ (X, a0 ) kapsama dönü³ümü J∗ : π1 (A, a0 ) −→ π1 (X, a0 )
Teorem 8.0.16.
izomorzmasn üretir.
48
Örnek 8.0.38.
R2
den iki nokta çkarrsak ne olur?
π1 (R2 , x0 ) = π1 (S 1 × S 1 , x0 ) =?
49
Bölüm 9
S n'N
TEMEL GRUBU
"Van-Kampen" Teoremi U ve V, X de U ∩ V yol
x0 ∈ U ∩ V olacak ³ekilde bir açk olmak üzere X = U ∪ V
i : (U, x0 ) −→ (X, x0 ) ve j : (V, x0 ) −→ (X, x0 ) kapsama dönü³ümleri,
Teorem 9.0.17.
ba§lantl, ve
olsun.
sfr homomorzmalar yani;
i∗ : π1 (U, x0 ) −→ π1 (X, x0 ),
[f ] 7→ i∗ ([f ]) = 0
homomorzmalarn üretiyorsa,
Örnek 9.0.39.
j∗ : π1 (V, x0 ) −→ π1 (X, x0 )
[g] 7→ j∗ ([g]) = 0
π1 (X, x0 ) = {0}
dr.
X = S 2 , U = S 2 − {p}, V = S 2 − {q}; U
ve
V, X
te açk
kümelerdir.
i∗ : (S 2 − {p}, x0 ) −→ (S 2 , x0 ), j∗ : (S 2 − {q}, x0 ) −→ (S 2 , x0 )
2
olsun. x0 ∈ U ∩ V = S − {p, q} olmak üzere
dönü³ümlar
i : π1 (S 2 − {p}, x0 ) −→ π1 (S 2 , x0 )
j : π1 (S 2 − {q}, x0 ) −→ π1 (S 2 , x0 )
dönü³ümlar sfr homomorzmadr. Çünkü;
S 2 − {p} ∼
= R2 ⇒ π1 (S 2 − {p}, x0 ) ∼
= π1 (R2 , x0 ) = {0}
S 2 − {q} ∼
= R2 ⇒ π1 (S 2 − {q}, x0 ) ∼
= π1 (R2 , x0 ) = {0}
Van-Kampen teoreminden
Teorem 9.0.18.
S2
π1 (S 2 , x0 ) = {0}
dr.
basit ba§lantl uzaydr.
spat:
π1 (S 2 , x0 ) = {0} (Örnek 9.0.39'dan)
2
2
2)S yol ba§lantl mdr? Yani f : I −→ S sürekli dönü³üm
f : I −→g R3 − {0} −→h S 2 , f = h ◦ g : I −→ S 2
1)
50
var m?
x 7→
x
kxk
t 7→ h ◦ g(t) =
sürekli dönü³üm vardr. Yani
O halde
(1)
Sonuç 9.0.5.
ve
yol ba§lantldr.
basit ba§lantl uzaydr.
1) Rn − {0} (n > 2)
2) R (n > 2) R
n
(2)den S 2
S2
2
g(t)
kg(t)k
basit ba§lantldr.
ye homeomorf de§ildir.
spat:
1)
Rn − {0} ∼
= S n−1
ve
S n−1
basit ba§lantl oldu§undan
Rn − {0}
basit
ba§lantldr.
2) Varsayalm ki
Rn , R2 ye
homeomorf olsun.
Rn − {0} ∼
= S n−1 ⇒ π1 (Rn − {0}, x0 ) ∼
= π1 (S n−1 , x0 ) ∼
= {0}
2
1
2
1
∼
∼
S
⇒
π
(R
−
{0},
x
)
π
(S
,
x
)
R − {0} ∼
=
1
0 = 1
0 = Z
π1 (Rn − {0}, x0 ) π1 (R2 − {0}, x0 )
oldu§undan varsaymmz yanl³tr.
51
Bölüm 10
YÜZEYLERN TEMEL GRUBU
Tanm 10.0.22.
E§er
Xe
oluyorsa,
X
Xe
R2
nin açk alt kümesine homeomorf
yüzey denir.
Teorem 10.0.19.
spat:
Hausdor, saylabilir baz olan bir topolojik uzay olsun.
ait her noktann kom³ulu§u
π1 (X × Y, x0 × y0 ) ∼
= π1 (X, x0 ) × π1 (Y, y0 )
p1 : X × Y −→ X
ve
p2 : X × Y −→ Y
izdü³üm dönü³ümleri olsun.
φ : π1 (X × Y, x0 × y0 ) −→ π1 (X, x0 ) × π1 (Y, y0 )
[h] 7→ φ([h]) = ([p1 ◦ h]), ([p2 ◦ h])
ile tanmlansn.
1)
2)
3)
φ homomorzma ve iyi tanmldr.
φ 1 − 1:
φ([h]) = ([ex0 ], [ey0 ]) olsun. h ' e(x0 ,y0 ) ?
([p1 ◦ h], [p2 ◦ h]) = ([ex0 ], [ey0 ]) ⇒ [p1 ◦ h] = [ex0 ] ∧ [p2 ◦ h] = [ey0 ]
⇒ p1 ◦ h ' ex0 ∧ p2 ◦ h ' ey0
⇒ h ' ex0 ∧ h ' ey0
⇒ h ' (ex0 , ey0 ) = e(x0 ,y0 )
φ örtendir:
g : I −→ X , x0 da bir loop; f : I −→ Y , y0 da bir loop olsun.
h : I −→ X × Y
t 7→ h(t) = (g(t), f (t))
x0 × y0 da bir looptur. Üstelik φ([h]) = ([g], [f ])dir. [g] ∈ π1 (X, x0 ), [f ] ∈
π1 (Y, y0 ). Bu durum φnin örtenli§ini getirir.
Sonuç 10.0.6.
π1 (T, z0 ) ∼
= Z × Z.
T ∼
= S1 × S1
π1 (T, z0 ) ∼
= π1 (S 1 × S 1 , x0 × y0 ) = π1 (S 1 , x0 ) × π1 (S 1 , y0 ) ∼
= Z × Z.
spat:
52
Bölüm 11
AYNI HOMOTOP TPNE
SAHP UZAYLAR
f : X → Y sürekli dönü³üm olsun. g ◦ f ' 1X ve f ◦ g ' 1Y
g : Y → X sürekli dönü³ümü varsa X ve Y ayn homotopine
ve ' ile gösterilir.
Tanm 11.0.23.
olacak ³ekilde
sahiptir denir
Teorem 11.0.20.
'
ba§nts bir denklik ba§ntsdr.
spat:
1. (Yansma)
X'X
1:X→X
ve
birim dönü³üm olsun.
10 ◦ 1 = 1 =⇒ 10 ◦ 1 ' 1
2. (Simetri)
dönü³üm vardr.
h ◦ k ' 1X
h=g
k=f
olacak ³ekilde
10 : X → X
vardr.
X'X
X ' Y =⇒ Y ' X
X ' Y =⇒ g ◦ f ' 1X
ve
1 ◦ 10 = 1 =⇒ 1 ◦ 10 ' 1
f ◦ g ' 1Y
h:Y →X
olacak ³ekilde
alrsak
3. (Geçi³me)
ve
Y 'X
X'Y
ve
olacak ³ekilde
g:Y →X
sürekli
sürekli dönü³üm olsun.
k ◦ h ' 1Y
ve
k : X → Y
sürekli dönü³ümü var mdr.?
gerçeklenir.
Y ' Z =⇒ X ' Z
X ' Y =⇒ g ◦ f ' 1X ve f ◦ g ' 1Y olacak ³ekilde g : Y → X
sürekli dönü³üm vardr. Y ' Z =⇒ h ◦ k ' 1Y ve k ◦ h ' 1Z olacak
53
k : Z → Y sürekli dönü³üm vardr. k, g, f, h dönü³ümleri sürekli
k ◦ f = m : X → Z ve g ◦ h = n : Z → X sürekli
dönü³ümlerini m◦n ' 1Z ve n◦m ' 1X olacak ³ekilde tanmlayabiliriz.
(k ◦ f ) ◦ (g ◦ h) = k ◦ (f ◦ g) ◦ h = (k ◦ 1Y ) ◦ h ' 1Z ve
(g ◦ h) ◦ (k ◦ f ) = g ◦ (h ◦ k) ◦ f = (g ◦ 1Y ) ◦ f ' 1X oldu§undan X ' Z
³ekilde
oldu§u için
dir.
O halde yukarda tanmlanan
Örnek 11.0.40.
1.
'
ba§nts bir denklik ba§ntsdr.
h:X →Y
homeomorzma ise
X
ve
Y
ayn homo-
topi tipine sahiptir.
h bir homeomorzma ise h ◦ k = 1Y ve k ◦ h = 1X
k : Y → X bir sürekli dönü³üm mevcuttur.
h ◦ k = 1Y =⇒ h ◦ k ' 1Y
2.
X R'nin
ve
olacak ³ekilde
k ◦ h = 1X =⇒ k ◦ h ' 1X
X
konveks alt kümesi olsun.
ile
{∗}
(tek noktal uzay) ayn
homotopi tipine sahiptir.
h:X →{∗}
sürekli dönü³ümünü ele alalm (h sabit dönü³üm oldu§u
k : { ∗ } → X sürekli dönü³ümü tanmlayalm:
k{ ∗ } = { ∗ } olsun. Buradan h ◦ k : { ∗ } → X → { ∗ },h ◦ k = 1{ ∗ } =⇒
h ◦ k ' 1{ ∗ }.
için süreklidir.)
k ◦ h ' 1X
nasl tanmlarz?
H :X ×I →X
sürekli dönü³ümünü
X
konveks oldu§u için ³u ³ekilde
tanmlyabiliriz:
H(x, t) = (1 − t).(k ◦ h)(x) + t.1X (x)
3.
S1
ile
R2 − {0}
ayn homotopi tipine sahiptir.
x
h : R2 − {0} → S 1 , h(x) = kxk
sürekli dönü³ümünü tanmlayalm.
1
2
k : S → R − {0}, k(x) = x kapsama dönü³ümünü ele alalm. (Kapsama dönü³ümü süreklidir.) k ◦ h ' 1R2 ve h ◦ k ' 1S 1 oldu§unu gösterelim.
S1
k/
R2 − {0}
h
/
S1
x
H : R2 − {0} × I → R2 − {0}, H(x, t) = (1 − t).x + t. kxk
dönü³ümünü
tanmlarsak k ◦ h ' 1R2 oldu§unu kolayca görebiliriz. Benzer ³ekilde
h ◦ k ' 1S 1 dir.
Teorem 11.0.21.
X
ve
Y
yol ba§lantl olsun.
X
ve
Y
sahip ise bu uzaylarn temel gruplar izomorftur. Yani
54
ayn homotopi tipine
π1 (X, x0 ) ' π1 (Y, y0 ).
spat: X ve Y uzaylar yol ba§lantl ve ayn homotopi tipine sahip olsun.
g : X → Y sürekli ve f , Y de kapal yol olsun. g ◦ h ' 1Y ve h ◦ g ' 1X
olacak ³ekilde h : Y → X sürekli dönü³ümü vardr.
g∗ : π1 (X, x0 ) → π1 (Y, y0 )
h∗ : π1 (Y, y0 ) → π1 (X, x0 )
g∗ ◦ h∗ ([f ]) = g∗ ([h ◦ f ]) = [g ◦ h ◦ f ] = [1Y ◦ f ] = [f ]
g∗ ◦ h∗ ([f ]) = 1Π1 (Y,y0 ) ([f ])
O halde
g∗
birebirdir.
(g ◦ h)∗ : π1 (Y, y0 ) → π1 (Y, y0 )
(h ◦ g)∗ [f ] = [h ◦ (g ◦ k)] = [1X ◦ k] = [k]
h∗ ◦ g∗ ([k]) = 1Π1 (X,x0 ) ([k])
h∗
nn sa§ tersi vardr dolaysyla
Tanm 11.0.24.
1X
h∗
örtendir.
(birim dönü³üm) sabit dönü³üme homotop ise
X 'e
bü-
zülebilir uzay denir.
Teorem 11.0.22.
bu uzayn
1. Bir uzayn büzülebilir olmas için gerek ve yeter ³art
{∗} tek noktal uzay ile ayn homotopi tipine sahip olmasdr.
2. Büzülebilir uzay basit ba§lantldr.
3. De§er kümesi büzülebilir olan iki dönü³üm homotoptur.
4. X büzülebilir ise
1X
sabit dönü³ümüne homotoptur.
spat:
1.
(⇒:) X
g :X →{∗}
büzülebilir uzay olsun.
C∗ = g : X → { ∗ } birim dönü³ümümüz
1 = h : { ∗ } → X olsun. Buradan g ◦ h = 1{∗} ve h ◦ g ' 1X
Sabit dönü³ümümüz
g : X → {∗}
sürekli dönü³ümumuz olsun. Hipotezden öyle bir h : { ∗ } → X sürekli
dönü³ümumuz vardr ki h ◦ g ' 1X ve g ◦ h ' { ∗ }. h ◦ g(x) = h(x) = c
sabit ve h ◦ g ' 1X oldu§u için X büzülebilirdir.
(⇐:) X
ve
{∗}
ayn homotopi tipine sahip olsun.
55
56
Bölüm 12
SMPLEKSLER
Tanm 12.0.25.
oluyorsa
A'ya
Tanm 12.0.26.
için
x
y
ve
A bir küme olsun. ∀x, y ∈ A, t ∈ [0, 1] için (1 − t)x + ty ∈ A
konveks küme denir.
A,
Euclid uzaynn bir alt kümesi olsun.
tarafndan olu³turulan do§ru
A'da
∀
bulunuyorsa
farkl
A'
x, y ∈ A
ya ane alt
küme denir.
Not:
1. Ane alt kümeler konvekstir.
2. Bo³ küme ve tek noktal kümeler ane kümelerdir.
Teorem 12.0.23.
o zaman
T
j∈J
xj
{xj }j∈J , Rn 'e
aitkonveks (ane) alt kümeler ailesi olsun.
konveks alt uzaydr.
spat:
∀x, y ∈
\
Xj (x 6= y)olsun.
j∈J
∀j ∈ J için x, y ∈ xj 'dir. ∀j ∈ J için xj ler konveks alt küme
T oldu§undan;
∀j ∈ J için (1 − t)x + ty ∈ Xj 'dir. O halde (1 − t)x + ty ∈ j∈J 'dir.
Tanm 12.0.27.
X, Rn 'in
bir alt kümesi olsun.
konveks kümelerin arakesitine
Tanm 12.0.28.
X 'in
X 'i
içeren
Rn 'e
ait tüm
konveks hull'u denir.
• p0 , p1 , . . . , pm , Rn 'de
noktalar olsun.
talarnn ane kombinasyonu
x = t0 p0 + t1 p1 + · · · + tm pm ;
m
X
i=1
³eklinde tanmlanr.
57
ti = 1
p0 , . . . , p m
nok-
• p0 , p1 , . . . , pm noktalarnn konveks
dur öyleki ti ≥ 0, i = 0, . . . m'dir.
t0 p0 + t1 p1 + · · · + tm pm ;
m
X
kombinasyonu an kombinasyonu-
ti = 1 ve ti ≥ 0, i = 0, . . . , m
i=1
Örnek 12.0.41.
x, y
noktalarnn konveks kombinasyonu an kombinasyonu
(1 − t)x + ty, t ∈ [0, 1]0 dir.
p0 , p1 , . . . , pm , Rn 'de noktalar olsun. p0 , . . . , pm noktalar
tarafndan gerilen [p0 , . . . , pm ] konveks küme, p0 , . . . , pm noktalarnn konveks
Teorem 12.0.24.
kombinasyonlarn kümesidir.
spat: S,tüm konveks kombinasyonlarn kümesi olsun.
S = [p0 , p1 , . . . , pm ]
?
(i)[p0 , p1 , . . . , pm ] ⊂ S
?
S 'nin p0 , . . . , pm noktalarn
içeren konveks küme oldu§unu göstermemiz
yeterli olacaktr.
• tj = 1
ve di§eleri için
tj = 0
olsun. Bu durumda;
m
X
t0 p0 + · · · + tj pj + · · · + tm pm ;
ti = 1, ti ≥ 0, i = 0, ..., m
i=0
• ⇒ ∀j
α=
için
m
X
pj ∈ S
ai p i , β =
i=0
m
X
bi p i ∈ S
olsun.(ai , bi ≥ 0;
X
ai = 1;
X
bi = 1)
i=0
(1 − t)α + tβ ∈ S
(1 − t)α + tβ = (1 − t)
m
X
ai p i + t
i=0
m
X
i=0
(1−t)ai +tbi = (1−t)
m
X
m
X
i=0
bi = 1,
i=1
58
bi p i =
m
X
((1 − t)ai + tbi )pi ∈ S
i=0
(1−t)ai +tbi ≥ 0 ⇒ (1−t)α+tβ ∈ S
⇒ [p0 , p1 , . . . , pm ] ⊂ S
(ii)S ⊂ [p0 , p1 , . . . , pm ] (?)
X , p0 , . . . , pm noktalarn içeren bir konveks
m ≥ 0 üzerinde tümevarm ile gösterelim.
• m=0
için
• m>0
olsun.
m
X
ti = 1 icin p =
i=0
p = p0
Aksi halde
t1
p
1−t0 1
S⊂X
oldu§unu
S = p0 'dr.
ti ≥ 0 ve
q=
küme ise
+
m
X
ti pi ∈ X
(p ∈ S) t0 6= 1 olsun.
i=0
olabilir ve bir üstteki ko³ul içine dü³er.
t2
tm
p +, . . . , + 1−t
pm
1−t0 2
0
∈X
p = to p0 + (1 − t0 )q ∈ X
⇒ S ⊂ X 'dir.
(i) ve (ii)'den
Sonuç 12.0.7.
S = [p0 , . . . , pm ]
p0 , p1 , . . . , pm , Rn 'de
noktalar olsun.
p0 , ..., pm
noktalarnn
gerdi§i an küme bu noktalarn an kombinasyonunu içerir.
Rn 'de p0 , . . . , pm noktalarnn sral kümesini ele alalm.
{p1 − p0 , p2 − p0 , . . . , pm − p0 } kümesi Rn vektör uzaynn lineer ba§msz alt
uzay ise p0 , p1 , . . . , pm sral kümesine an ba§mszdr denir.
Tanm 12.0.29.
Not:
1.
Rn 'nin
lineer ba§msz alt kümesi an ba§msz kümedir. Tersi do§ru
de§ildir.
2. Tek noktal küme
3.
{p0 , p1 }
{p0 }
an ba§mszdr.
kümesi an ba§mszdr.
59
4.
{p0 , p1 , p2 }
p0 , p1 , p2
an ba§mszdr. (
ayn düzlemde olursa kolineer
durumu olaca§ndan an ba§msz olamaz.)
Teorem 12.0.25.
{p0 , . . . , pm }, Rn 'de
sral küme olsun. A³a§dakiler denk-
tir:
1.
{p0 , . . . , pm }
2.
{s0 , . . . , sm } ⊂ R
an ba§mszdr.
kümesi
m
X
si pi = 0 ve
m
X
i=0
i=0
e³itsizliklerini do§ruluyor ise
3.
∀x ∈ A (A, {p0 , . . . , pm }
si = 0
s1 = s2 = · · · = sm = 0dr.
tarafndan gerilen an küme) eleman,
x=
m
X
ti pi
ve
m
X
i=0
ti = 1
i=0
an kombinasyonu olarak tektürlü ifade edilir.
spat:
1.
{p0 , p1 , ..., pm }
an ba§msz olsun.
m
X
{s0 , ..., sm } ⊂ R
si pi = 0 ve
i=0
m
X
kümesi
si = 0
i=0
e³itsizliklerini sa§lasn.
m
X
si pi =
i=0
i = 1, . . . , m
m
X
si pi − (
i=0
için
p i − p0
m
X
si )p0 =
i=0
si (pi − p0 ) = 0
i=0
lineer ba§msz. Çünkü
§msz. o halde;
s1 = s2 = · · · = sm = 0'dr.
m
X
i=0
oldu§undan
m
X
s0 = 0'dr.
60
si = 0
{p0 , . . . , pm }
an ba-
2.
xεA
alalm. Sonuçtan dolay;
x=
m
X
t0i pi
m
X
ve
i=0
x=
m
X
i=0
t0i pi
ve
i=0
m
X
ti pi =
i=0
3.
∀x ∈ A
m
X
t0i pi ⇒
i=0
eleman
t0i = 10 dir.
m
X
t0i = 1 olsun.
i=0
m
X
∀i
∀i
ti − t0i pi = 0 ⇒ ti − t0i = 0 ⇒ ti = t0i
i=0
p0 , p1 , ..., pm
noktalarnn an kombinasyonu olarak
{po , . . . , pm } kümesinin an
{p1 − p0 , p2 − p0 , . . . , pm − p0 }
tektürlü ifade edildi§ini varsayalm. Yani
ba§msz oldu§unu göstermeliyiz. Yani;
lineer ba§msz oldu§unu göstermeliyiz.
Varsayalm ki
{p1 − p0 , . . . , pm − p0 }
m
X
lineer ba§ml olsun. O halde;
ri (pi − p0 ) = o
i=0
ri (hepsi
pj ∈ A ise
iken
rj 6= 0
sfr de§il) vardr.
pj = −
X
rj = 1
alalm.
pj = 1.pj
X
ri pi + (
ri + 1)p0
i6=j
pj
olsun.
i6=j
iki türlü ifade edilemeyece§inden çeli³ki.
O halde
{p1 − p0 , . . . , pm − p0 }
Sonuç 12.0.8.
{p0 , . . . , pm }
lineer ba§mszdr.
sral küme olsun. An ba§mszlk bu kümenin
bir özelli§idir.
Tanm 12.0.30.
{a1 , . . . , ak }, Rn 'de
bir küme olsun. Bu kümenin
eleman an ba§msz küme olu³turuyorsa,
yondadr denir.
61
{a1 , . . . , ak }
(n + 1)
kümesi genel pozis-
Notlar:
Genel pozisyonda olma özelli§i
{a1 , a2 , . . . , ak }R
• n = 1
n
için
n
saysna ba§ldr.
'de genel pozisyon olsun.
{ai , aj }
an ba§msz olmaldr. Yani tüm noktalar farkl
olmal.
• n=2
için üç nokta kolineer olmamaldr.
• n=3
için dört nokta kodüzlem olmamaldr.
Teorem 12.0.26.
∀k ≥ 0
Rn
için
k
tane
an ba§msz alt küme olsun.
A'da
Euclid uzay genel pozisyonda
eleman ihtiva eder.
Teorem 12.0.27.
{p0 , p1 , . . . , pm }Rn 'de
bu alt küme tarafndan gerilen bi an küme olsun.
x ∈ A;
x=
m
X
ti pi ,
i=0
(t0 , t1 , . . . , tm )(m + 1)
p0
p1
bile³enine
t0 = t1 =
x
m
X
ti = 1
i=0
elemannn bary-centric koordinat denir.
1
2
p2
JJ
J
t0
"J
b
b "
"
"b
b J
b J
""
b
J
"
b
p0
x = 13 (p0 + p1 + p2 )
p1
p3
p2
"
"
"
""
""
"
p0
Genel hali:
= t1 = t2 = 31 ,
x = 41 (p0 + p1 + p2 + pj )
p1
1
(p
m+1 0
Tanm 12.0.31.
+ · · · + pm ) = x
{p0 , p1 , . . . , pm }, Rn 'de
an ba§msz olsun.
{p0 , p1 , . . . , pm }
[p0 , p1 , . . . , pm ]
kümesi tarafndan gerilen konveks kümeye m-simpleks denir.
p
ile gösterilir. ( i 'ler kö³eler)
62
Teorem 12.0.28.
simpleksinin her
x
x=
{P0 , P1 , . . . , Pm }
an ba§msz olsun.
{P0 , . . . , Pm }
m-
eleman;
m
X
ti pi ,
i=0
m
X
ti ≥ 0,
ti = 1,
i = 0, . . . , m
i=0
formunda tektürlü yazlr.
{P0 , P1 , . . . , Pm } an ba§msz olsun. [P0 , . . . , Pm ] m-simpleksinin
1
1
(P0 +P1 +· · ·+Pm )'dir.(t0 = t1 = · · · = tm = m+1
)
barycentrik koordinat;
m+1
Tanm 12.0.32.
Örnek 12.0.42.
• [P0 ]
barycentric'i kendisidir.
• [P0 , P1 ]
1-simpleksinin barycentric'i
• [P0 , P1 , P2 ]
1
(P0
2
2-simpleksinin barycentric'i
+ P1 )'dir.
1
(P0
3
+ P1 + P2 )'dir.
• ei = (0, 0, . . . , 0, 1, 0, . . . , 0) ∈ Rn+1
{e0 , e1 , . . . , en } an ba§mszdr.
[e0 , e1 , . . . , en ],
n
X
x=
ti ei
i=0
formundaki tüm konveks kombinasyonu içerir.
(t0 , t1 , . . . , tn )'dir.
P0 = (1, 0, 0, 0, 0 . . . ) = e0 ,
P1 = (0, 1, 0, 0, 0 . . . ) = e1 ,
P2 = (0, 0, 1, 0, 0 . . . ) = e2 ,
P3 = (0, 0, 0, 1, 0, . . . ) = e3 ,
......
centric koordinat
6
v
a
aa
aa v v
63
[e0 , e1 , . . . , en ]'in
bary-
Tanm 12.0.33.
[P0 , P1 , . . . , Pm ]
m-simpleks olsun.
m
X
tj pj |
[P0 , P1 , . . . , Pin , Pi+1 , Pm ] = {
j=0
[P0 , P1 , . . . , Pm ]
s
m
X
Pi 'nin
tj = 1,
ters yüzü
tj ≥ 0}0 dir.
j=0
m-simpleksinin snr bu ters yüzlerin birle³imidir.
0-simplekste
P0 'in
tersyüzü kendisi
P0
1-simplekste
P0
P1 'in
tersyüzü
P0 'dr.
P1
P2
@
@
@
@
2-simplekste
@
P
P2 'nin
ters yüzü
P 2 P0
ve
P0 P 1
do§ru par-
P1
çalar
0
P3
@
@
@
@
P0HH
@
P2
H
H
H
P1
Not:
1. Bir m-simpleksin
2.
[P0 , P1 , . . . , Pm ]
m+1
tane yüzü vardr.
simpleksinin
k
yüzü, k-simplekstir. Öyleki bu yüz
kö³e tarafndan gerilir.
Teorem 12.0.29.
i.
ii.
iii.
u, v ∈ S
ise
S, n
simpleksi
[P0 , P1 , . . . , Pn ]
ile gösterilir.
ku − vk ≤ Sup ku − Pi k
diamS = Sup kPi − Pj k
b, S 'nin
barycentric'i ise
kb − Pi k ≤
64
n
n+1
(diamS)
k+1
spat:
i.
n
X
v=
n
X
ti pi ,
i=0
ti = 1,
ti ≥ 0,
i=0
|u − vk = ku −
n
X
n
n
X
X
ti pi k = k(
ti )u −
ti pi =
i=0
k
n
X
i = 0, . . . , n olsun
ti (u − pi )k ≤
i=0
n
X
i=0
kti (u − pi )k =
i=0
i=0
n
X
ti ku − pi k
i=0
n
X
≤(
ti )Sup ku − pi k
i=0
ii.
ku − pi k ≤ Sup kpj − pi k0 dir.
çap tanmndan;
diamS = Sup kpi − pj k
n
iii.
b=
1 X
pj
n + 1 j=0
olmak üzere;
n
1 X
kb − pi k = k
pj − pi k
n + 1 j=0
n
1 X
1 X
=k
pj −
j = 0n pi k
n + 1 j=0
n+1
n
1 X
=k
(pj − pi )k
n + 1 j=0
n
1 X
≤
Sup kpj − pi k
n + 1 j=0
(i = j, kpj − pi k)
n
n
=
Sup kpj − pi k =
diamS
n+1
n+1
65
Tanm 12.0.34.
{P0 , . . . , Pm }
an ba§msz ve
A
bu noktalarn gerdi§i an
küme olsun.
T : A → Rk
m
m
m
X
X
X
ti pi 7−→ T (
ti pi ) =
ti T (pi )
i=0
T |S=[P0 ,...,Pm ]
Notlar:
i=0
i=0
kstlan³ yine bir an dönü³ümdür.
1. An dönü³üm, an kombinasyonu ve konveks kombinasyonu korur.
2. An dönü³üm, an ba§msz küme üzerinde ald§ de§erle belirlenebilir.
3.
P0 , . . . , P m
noktalarnn bary centric koordinatn tekli§i bu tür
T
dön-
ü³ümlerin varl§n gösterir.
[P0 , . . . , Pm ] m-simpleks, [q0 , . . . , qn ] n simpleks ve
f : {P0 , . . . , P0 } −→ [q0 , . . . , qn ] bir fonksiyon olsun. T (Pi ) = f (pi )
³ekilde bir tek T : [P0 , . . . , Pm ] −→ [q0 , . . . , qn ] mevcuttur.
Teorem 12.0.30.
Y.G :
m
m
X
X
T(
ti pi ) =
tf (pi )
i=0
i=0
66
olacak
Bölüm 13
SIMPLICIAL KOMPLEKSLER
S = [v0 , v1 , . . . , vq ] q-simpleks olsun.
V er(S) = {v0 , . . . , vq } ile gösterilsin.
Tanm 13.0.35.
S
Bu simplekslerin kö³elerinin kümesi
V er(S 0 ) ⊂ V er(S) ise S 0 ne S
V er(S 0 ) ( V er(S) ise S 0 ne S simpleksinin
bir simpleks olsun. E§er
simpleksinin yüzü denir. E§er
has yüzü denir.
Tanm 13.0.36. Sonlu simplicial kompleks
K
a³a§daki özellikleri sa§layan
simplekslerin kolleksiyonudur.
i.
ii.
s∈K
ise
s, t ∈ K
s
nin yüzü de
K
ya aittir.
ise bu iki simpleksin arakesiti ya bo³tur ya da bu iki simpleksin
ortak yüzüdür.
Tanm 13.0.37.
1.
K
bir simplicial kompleks olsun.
K 'nn
underlying
uzay
| K |=
[
s
s∈K
K, Rn 'in
³eklinde tanmlanr. (
2.
alt uzay)
X topolojik uzay verilsin. E§er K simplicial kompleks ve
h :| K |→ X homeomorzma varsa X 'e polyhedron denir. (K, h)
sine X 'in üçgenle³tirilmesi denir.
Not:
• (K),
Euclid uzaynn kompakt alt uzaydr.
• s, K 'da
bir simpleks ise
| s |= s'dir.
67
ikili-
Örnek 13.0.43.
2
X
4 ={
ti vi
2
|
i=0
2
X
ti = 1,
i = 0, 1, 2}
i=0
(42 ⊂ Rn ) K = 42
standart 2-simpleks
ti ≥ 0,
standart 2-simpleksindeki tüm
0-simpleks ve tüm 1-simplekslerin kolleksiyonu olsun.
v2
K = {[v0 ], [v1 ], [v2 ], [v0 , v1 ], [v0 , v2 ], [v1 , v2 ]}
@
@
@
@
@
v0
v1
2 − simpleks
K
K
simplicial komplekslerin kolleksiyonu iki ko³ulu da sa§lar.
underlying uzay üçgen olacaktr.
v2
L : |K| =
v0
@ −→
@
X = S1
v1
homeorzmas var.
O halde çember polyhedrondur.
v5
v2
[v1 , v2 ] ∩ [v3 , v5 ] = [v3 ] → v3
JJ v
3
JH
J HH
H
H
J
→
Örnek 13.0.44.
v0
v1
v2
v0
→
v5
JJ
v
J3
J
J
v1J
JJ
ortak yüz de§ildir.
Simplicial kompleks de§il.
v4
Simplicial kompleks de§il.
v1 , v3
ortak yüz de§il.
v4
Tanm 13.0.38.
talar,
K 'da
K
ve
L
{p0 , p1 , . . . , pq } nok{ϕ(p0 ), ϕ(p1 ), . . . , ϕ(pq )} noktalar L'de
iki simplicial kompleks olsun.
bir simpleksi gererken
68
bir simpleksi gerecek ³ekilde tanmlanan
ϕ : K → L
dönü³üme simplicial
dönü³üm denir.
Teorem 13.0.31.
homeomorzm ise
Tanm 13.0.39.
K ve L iki simplicial
dimK = dimL'dir.
K
kompleks olsun. E§er
f : |K| → |L|
bir simplicial kompleks olsun.
dimK = sup{dim(s)}
s∈K
Örnek 13.0.45.
P0 = (0, 0, 0),
P1 = (1, 0, 0),
P2 = (1, 2, 0),
(2, 3, 4)
P3
6
P0
@
R
@
@
@ P2
P1 Bu üçgen prizmann snrlar bir simplicial kompleks olu³turur.
~ 0-simpleksler:
σ10 = P0 , σ20 = P1 ,
~ 1-simpleksler:
σ11 = (P0 , P1 ),
σ51 = (P1 , P3 ),
σ30 = P2 ,
σ21 = (P0 , P2 ),
σ61 = (P2 , P3 )
~ 2-simpleksler:
σ12 = (P0 , P1 , P2 ),
σ42 = (P0 , P1 , P3 )
σ40 = P3
σ31 = (P0 , P3 ),
σ22 = (P1 , P2 , P3 ),
69
σ41 = (P1 , P2 ),
σ32 = (P0 , P2 , P3 ),
P3 =