5. Uluslararası İleri Teknolojiler Sempozyumu (IATS’09), 13-15 Mayıs 2009, Karabük, Türkiye
THIPWM ile Kontrol Edilen 3 Fazlı Gerilim Beslemeli İnverterin
Matlab/Simulink ile Modellenmesi ve DSP Kontrolör ile Uygulamasının
Gerçekleştirilmesi
Model with Matlab/Simulink and Application with DSP Controller of
Three Phase Voltage Source Inverter Controlled with THIPWM
a,
a
b
a
Mehmet YUMURTACI *, Seçil VARBAK NEŞE , Seydi Vakkas ÜSTÜN ve Yüksel OĞUZ
a
Afyon Kocatepe Üniversitesi, Afyon, Türkiye
Adıyaman Üniversitesi, Adıyaman, Türkiye E-posta:
E-posta: mehmetyumurtaci@aku.edu.tr, secilvarbak@aku.edu.tr, svustun@adiyaman.edu.tr, yukseloguz@aku.edu.tr
b
Özet
Bu çalışmada, motor kontrolü amacıyla geliştirilmiş olan
Dijital İşaret İşlemeli (DSP) kontrolörlerden dsPIC30F2010
mikro kontrolörü kullanılarak açık çevrim gerilim beslemeli
bir inverterin Üçüncü Harmonik Enjeksiyonlu Darbe
Genişlik Modülasyonu (Third Harmonic Injection Pulse
Width Modulation) (THIPWM) tekniğiyle kontrolü yapıldı ve
sistem
modeli
Matlab/Simulink
programında
gerçekleştirildi. Güç analizörü ile asenkron motor
girişindeki akım harmonikleri ve akımın dalga şekli ile ilgili
ölçümler yapıldı. Elde edilen sonuçlar uygulama ile
simülasyon
sonuçlarının
birbirlerini
desteklediğini
göstermiştir. THIPWM tekniği, Sinüsoidal Darbe Genişlik
Modülasyonuna (Sinusoidal Pulse Width Modulation)
(SPWM) göre çıkış gerilimi daha yüksek ve Toplam
Harmonik Distorsiyon (THD) değeri daha düşük olan bir
PWM tekniğidir. Çıkış gerilimindeki artıştan dolayı aynı güç
değeri için düşük akım seviyesine göre motor kontrol
sistemi dizayn edilir. Akımdaki bu azalma iletim
kayıplarında da azalmaya sebep olacaktır.
Anahtar kelimeler: THIPWM,
Beslemeli İnverter, Matlab/Simulink
Harmonik,
Gerilim
Abstract
In this paper, control of open loop voltage sourced inverter
with Third Harmonic Injection Pulse Width Modulation
(THIPWM) technique is made using dsPIC30F2010
microcontroller that one of DSP controller developed for
motor control purpose and system model is implemented
in Matlab/Simulink program. Measurements concerned
with input current harmonics of motor and waveform of
current were made with power analyzer. Obtained results
showed that results of simulation and experiments support
each other. THIPWM technique is a Pulse Width
Modulation (PWM) technique which has higher output
voltage than Sinusoidal PWM (SPWM) and has low Total
Harmonic Distortion (THD) value. Motor control system is
designed according to low current level for same power
value because of increment at output voltage. This
decrease at current will cause to decrease in transmission
losses.
Keywords: THIPWM, Harmonic, Voltage Source Inverter,
Matlab/Simulink
1. Giriş
© IATS’09, Karabük Üniversitesi, Karabük, Türkiye
İnverterin görevi, DC giriş gerilimini; simetrik, istenilen
genlikte ve frekansta AC gerilime dönüştürmektir. DC giriş
gerilimi sabit ve ayarlanamaz ise, inverter kazancının
ayarlanmasıyla değişken çıkış gerilimi elde edilebilmekte,
bu genelde inverterin PWM ile kontrolüyle sağlanmaktadır.
PWM tekniği ve stratejileri sinüsoidal çıkış gerilimi elde
etmek için 1970’lerden beri yoğun bir araştırma konusudur.
İnverterin çıkışındaki harmonik içerik PWM kullanılarak
azaltılabilir [1]. Senkron ve asenkron makinaların her ikisi
içinde, harmoniklerin ana problemi demir ve bakır
kayıplarının artması, harmoniklerin sebep olduğu yüksek
akımdan dolayı ısınma ve verimin düşmesidir. Harmonikler
motor momentinde salınımlara neden olabileceği gibi,
yüksek akım bu makinalarda, yüksek ses seviyesine sebep
olabilir [2].
PWM tekniğindeki temel yaklaşım bir referans sinyal ile
taşıyıcı sinyalin karşılaştırılmasıdır. Referans sinyalin
taşıyıcı sinyalden büyük olduğu durumlarda çıkış sinyali
pozitif değer alırken referans sinyalin taşıyıcı sinyalden
küçük olduğu durumlarda çıkış sinyali negatif değer alır.
Sinyallerin kesişim noktaları yarı iletken güç elektroniği
anahtarlama
elemanlarının
komütasyon
zamanını
göstermektedir [3].
PWM tekniğinin kullanılmasının amacı inverterin
çıkışındaki THD seviyesini azaltmak, istenilen harmonikleri
yok etmek, filtreleme gereksinimini en aza indirmek,
geriliminin genliğini arttırmak ve anahtarlama kayıplarını en
aza indirmektir [4,5].
PWM tekniği; gerilim beslemeli inverterler de, AC motor
sürücü uygulamalarında, DC şebekenin kontrollü
doğrultucu uygulamalarında ve AC güç dönüşümünde
yaygın olarak kullanılmaktadır. Birçok gerilim kaynaklı
inverter sürücülerinde; sabit anahtarlama frekansı, düşük
akım
dalgalanması
ve iyi
harmonik
spektrum
karakteristiklerinden dolayı taşıyıcı tabanlı PWM metotları
tercih edilir[6]. Taşıyıcı tabanlı metotlar için üçgen kesişim
tekniği ve doğrudan dijital metot olmak üzere genellikle iki
uygulama tekniği kullanılır. Üçgen kesişim tekniğinde PWM
sinyali oluşturmak için bir referans sinyal ile üçgen sinyal
karşılaştırılır. Doğrudan dijital metot ta ise uzay vektör
modülasyonunda her bir örnekleme peryodu için doluluk
boşluk oranı hesaplanır [7].
Yumurtacı, M., Varbak Neşe, S., Üstün, S. V. ve Oğuz, Y.
2. PWM Tekniği
Denklem 2’de M modülasyon indeksini, Vc kontrol sinyalini
PWM tekniğinin temel prensibi kısaca yarı iletken
anahtarlama elemanlarının on/off kontrolü olarak
tanımlanabilir. Aynı genlikte ve farklı genişlikteki bir dizi
darbe, sinüsoidal dalgayı veya istenilen diğer dalga
şekillerini elde etmek için çıkış portunda üretilir. Çıkış
dalga şeklinin doluluk boşluk oranı belirli kurallar yoluyla
ayarlanır [8].
ve Vt taşıyıcı sinyali göstermektedir.
İnverterdeki toplam harmonik distorsiyonunu azaltmak için
bir yarı periyottaki darbe sayısını arttırmak gerekmektedir.
Bir yarı periyottaki darbe sayısı, yok edilmek istenilen
harmoniklere göre kararlaştırılabilir. Bu sayı sınırlı tutulmak
zorundadır. Çünkü makine kayıplarını azaltmakla sağlanan
verim inverterde oluşan komutasyon kayıpları nedeniyle
düşecektir. Son yıllarda geliştirilen anahtarlama kayıpları
düşük ve hızları yüksek olan anahtarlama elemanları ve
yeni PWM teknikleri ile inverterlerde ortaya çıkan
problemler büyük ölçüde giderilmekte ve bununla birlikte
verimi de yükseltilmektedir.
Şekil 1. İki seviyeli taşıyıcı tabanlı PWM.
PWM tekniği taşıyıcı sinyal ile kontrol sinyalinin
karşılaştırılmasına dayanır. Şekil 1‘de görüldüğü gibi
kontrol sinyali taşıyıcı sinyalinden büyükse (Vc>Vt) çıkış
+Vi, kontrol sinyali taşıyıcı sinyalden küçükse (Vc<Vt) çıkış
–Vi olur. Sinyallerin kesim noktaları yarı iletken
anahtarlama elemanlarının komütasyon zamanını gösterir.
PWM tekniğinde iki çalışma modu vardır. Bunlar doğrusal
mod ve doğrusal olmayan moddur. Doğrusal modda,
kontrol sinyalinin genliği taşıyıcı sinyalin genliğine eşit veya
küçüktür. Şekil 1 doğrusal modda ki bir PWM şeklini
göstermektedir. Doğrusal olmayan modda, kontrol
sinyalinin genliği taşıyıcı sinyalin genliğinden büyüktür.
Verim %100’ün altına düşer ve aşırı modülasyon oluşur.
Çıkış anahtarlama dalga şekillerinin THD’si artar [4].
Kontrol sinyalinin genliğinin yükseltilip azaltılmasıyla,
çıkışta elde edilen PWM işaretinin darbe genişliklerinin
değişmesi nedeniyle, temel bileşeninin genliğinde değişme
sağlanır ve çıkış gerilimi ayarlanabilir. Çıkış frekansı,
kontrol sinyalinin frekansıyla aynıdır.
Üçgen işaretin frekansı, periyot başına yarı iletkenlerin
anahtarlama sayısını belirlemektedir. İnverter çıkış
geriliminin ayarlanmasında etkin olan iki büyüklük vardır.
mf =
M =
Denklem 1’de
fc
f1
(1)
Vc
Vt
mf
taşıyıcı frekansı ve
(2)
frekans modülasyon oranını,
fc
f1 temel frekansı göstermektedir.
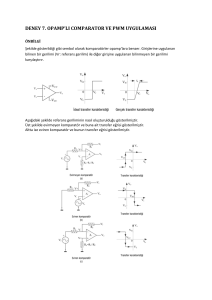
Şekil 2. Sinüsoidal sinyale 3. harmonik enjeksiyonundan
elde edilen kontrol sinyali (a), kontrol sinyalinin taşıyıcı
sinyalle karşılaştırılması (b), elde edilen THIPWM (c)
2.1 THIPWM Tekniği
PWM kazancını arttırmanın bir metodu üçüncü harmonik
enjekte etmektir. THIPWM tekniği temel dalga olan sinüs
dalgasının üzerine üçüncü harmoniğin eklenmesiyle
oluşan kontrol sinyalinin testere formundaki taşıyıcı
sinyalle karşılaştırılmasından elde edilir. Şekil 2 a’ da
sinüsoidal sinyale belirli oranda 3. harmoniğin enjekte
edilmesiyle elde edilen kontrol sinyali gösterilmektedir.
Şekil 2 b’ de elde edilen kontrol sinyali ile taşıyıcı sinyalin
karşılaştırılması yapılmakta ve Şekil 2 c’ de elde edilen
THIPWM dalga şekli görülmektedir. SPWM’e göre %15
kazancı daha fazladır. THIPWM’ in referans dalga şekli
denklem (3) teki gibi tanımlanmaktadır [9].
f (ω0t ) = 1.15M sin(ω0t ) + 0.19M sin(3ω0t ) 0 ≤ ω0t ≤ 2π (3)
Yumurtacı, M., Varbak Neşe, S., Üstün, S. V. ve Oğuz, Y.
Sadece %78,5 verime sahip olan SPWM, üçüncü
harmonik enjeksiyonu ile kazancı %90,7’lere yükselir [7].
3. Sistemin Tanıtılması
3.1 Deneysel Çalışma
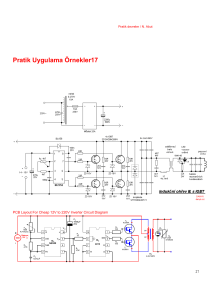
Kontrol devresinin sürücü olarak kullandığı güç devresi,
Akıllı Güç Modülü (Intelligent Power Module) (IPM) ile
yapılan inverterin ve asenkron motorun sürülmesini
sağlamış olup, prensip şeması Şekil 5’te verilmiştir. IPM
aşırı akım, kısa devre ve aşırı sıcaklığa karşı kendini
koruyacak
şekilde tasarlanmıştır.
Bu
durumlarla
karşılaşıldığında kontrol sinyali ne olursa olsun IPM
durmakta ve dışarıya hata sinyali göndermektedir. IPM
içerisindeki her bir IGBT‘e HP4504 gibi bu amaçla üretilmiş
olan opto sürücü üzerinden kontrol işareti verilmektedir.
Kullanılan IPM ile 15kHz gibi yüksek anahtarlama
bölgesinde çalışabilmektedir [11]. Çizelge 1’de kullanılan
asenkron motorun parametreleri verilmektedir.
Çizelge 1. Asenkron motorun parametreleri [12]
Şekil 3. Kontrol devresinin blok diyagramı.
PWM kontrol tekniklerini içeren uygulama devresinin blok
diyagramı Şekil 3’te gösterilmektedir. EasydsPIC2 DSP
kartı hem programlama hem de kontrol amaçlı
kullanılmıştır
ve
USB
aracılığıyla
bilgisayara
bağlanmaktadır.
Şekil 4. Gerilim beslemeli köprü inverter
Gerilim beslemeli inverterler, bir yanda DC gerilimi alır ve
diğer yanda AC gerilime dönüştürür (Şekil 4). AC gerilim
ve frekans uygulamaya bağlı olarak sabit veya değişken
olabilir. Gerilim beslemeli inverterin girişinde sabit gerilim
kaynağı vardır. Kaynak sabit değilse büyük değerli bir
kapasitör girişe bağlanabilir. İnverter çıkışı tek fazlı veya
çok fazlı olabilir [10].
Parametre
Stator direnci (Rs)
Rotor direnci (Rr)
Stator endüktansı (Ls)
Rotor endüktansı (Lr)
Mıknatıslanma endüktansı (Lm )
Atalet momenti (J)
Kutup sayısı (2p)
Hat gerilimi (U)
Güç (P)
Hat akımı (I)
Güç katsayısı (Cos ϕ )
Rotor devri (nr)
Frekansı (f)
Parametre Değeri
10,0105 (Ω)
11,9358 (Ω)
0,0767 (H)
0,0767 (H)
1,6041 (H)
0,0165 (kgm2)
1
380 (V)
550 (W)
1,34 (A)
0,84
2780 (1/min)
50 (Hz)
Bir IGBT’in devreden çıkıp onun tümleyeninin devreye
girmesi için gerekli olan ölü zaman değeri 5 µs olarak
belirlenmiştir. THIPWM oluşturmak için gerekli olan yazılım
C programlama dilinde MPLAB IDE ortamında
geliştirilmiştir. Bu programın derlenmesiyle elde edilen hex
dosyası mikroElektronika-dsPicFLASH programı aracılığı
ile
USB’den
DSP
mikroişlemcisine
yüklenerek
çalıştırılmıştır.
3.2 Simülasyon
Gerilim beslemeli inverterin prensip şeması doğrultusunda
sistemin simülasyonu Matlab/Simulink programında
SimPowerSystems toolbax’ı içerisindeki elemanların
kullanılmasıyla Şekil 6’daki gibi gerçekleştirilmiştir.
Şekil 6. Deneysel sistemin Simulink modeli
4. Simülasyon ve Deneysel Çalışma Sonuçları
Şekil 5. Asenkron motorun gerilim beslemeli AC sürme
devresi prensip şeması.
THIPWM tekniğinin kullanıldığı açık çevrim kontrollü
gerilim beslemeli inverterle yüksüz durumda bir asenkron
motor çalıştırılmıştır.
Yumurtacı, M., Varbak Neşe, S., Üstün, S. V. ve Oğuz, Y.
(a)
(a)
(b)
Şekil 6. M=0,9, mf=175 için deneysel çalışma (a) ve
simülasyon (b) ile elde edilen inverter çıkış akımı dalga
şekli
Simülasyon ve deneysel çalışma sonuçlarına göre inverter
çıkışına bağlı olan asenkron motorun bir fazından çekilen
akımın dalga şekli ve genliği Şekil 6’da gösterilmektedir.
THDi akım harmoniklerini sınırlandırmak için kullanılır,
temel bileşen hariç tüm harmonik bileşenlerinin vektörel
toplamının efektif değere bölünmesiyle bulunur.
∞
∑I
THDI =
n =2
I1
2
n
(4)
Simülasyon ve deneysel çalışma sonuçlarına göre inverter
çıkış
akımı
harmonik
spektrumu
Şekil
7’de
gösterilmektedir.
Deneysel çalışma ve Simülasyon sonuçlarından da
görüldüğü gibi inverter çıkış akım dalga şekli sinüs
formunda ve THDİ faktörü akım harmonikleri sınır değeri
olan % 5’in çok altındadır.
(b)
Şekil 7. M=0,9, m f=175 için deneysel çalışma (a) ve
simülasyon (b) ile elde edilen inverter çıkış akım
harmoniklerinin spektrumu
5.Sonuçlar
Asenkron motorlar, sürme devrelerindeki yarı iletken
anahtarlama güç elemanlarından dolayı birer harmonik
kaynağıdır. İnverterin ürettiği harmonikler kaçınılmaz
olduğundan bunların optimizasyonu yoluna gidilmiştir. Bu
amaçla, kullanılan yarı iletken güç anahtarlama
elemanlarının daha hızlı ve anahtarlama kayıpları az
olanları tercih edilirken, inverterlerde kullanılan PWM
teknikleri de geliştirilmektedir.
PWM kazancını arttırmanın bir metodu üçüncü harmonik
enjekte etmektir. Bu teknik sinüs dalgaya yine sinüs
formundaki üçüncü harmonik bileşenin eklenmesiyle elde
edilir. THIPWM tekniği, Uzay Vektör PWM (Space Vector
PWM) (SVPWM) tekniğinin hesaplama yoğunluğuna gerek
kalmadan aynı özellikleri göstermektedir. THIPWM tekniği
geniş lineer modülasyon aralığına sahiptir. İnverter çıkış
gerilimi SPWM’in çıkış geriliminden yaklaşık %15 daha
fazladır, dolayısıyla DC bara geriliminin daha verimli
kullanılmasını sağlar ve THD değeri daha düşüktür. Çıkış
gerilimi daha yüksek olduğundan aynı güç değeri için daha
az akım çekilir ve bu da kullanılan anahtarlama
elemanlarının akım değerlerinin daha düşük seçilmesini ve
anahtarlama kayıplarının azalmasını sağlar.
Yumurtacı, M., Varbak Neşe, S., Üstün, S. V. ve Oğuz, Y.
Kaynaklar
[1] Jeevananthan, S., Nandhakumar, R., Dananjayan,
P.,”Inverted Sine Carrier for Fundamental Fortification
in PWM Inverters and FPGA Based Implementations ”,
Serbian Journal of Electrical Engineering, Vol.4,
No.2,2007.
[2] Dugan, R.C., McGranchan, M.F., Beay, H.W.,
Electrical Power Systems Quality, McGraw Hill
Companies, Inc. 1996.
[3] Karanun, K, Khan-ngern, W., Nitta, S., The
Characteristics of Conducted EMI Emission on PWM
Inverters with Various PWM Patterns, IEEE, 2002.
[4] Zhou, K., Wang, D., Relationship between SpaceVector Modulation and Three-Phase Carrier-based
PWM: A Compherensive analysis, IEEE Transactions
on Industrial Electronics, Vol.49, No.1, pp.186-196,
2002.
[5] Jeevananthan, S., Dananjayan, P., Venkatesan, S., A
Novel Modified Carrier PWM Switching Strategy for
Single-Phase Full-Bridge Inverter, Iranian Journal of
Electrical and Computer Engineering, Vol.4 No.2,
2005.
[6] Hava, A.M., Kerkman, R.J., Lipo, T.A., Simple
Analytical and Graphical Methods for Carrier-Based
PWM-VSI Drives, 1999.
[7] Sundvall, J., Varens, M.C.P., Ofeigsson, T.,
Swierczynski, M., Dynamic Control of an Electrical
Truck Motor, Alborg University, Institute of Energy
Technology, 2007.
[8] Infineon Technologies AG, Different PWM Waveforms
Generation for 3-Phase AC Induction Motor with
XC164CS, Application Note, V1.0, July 2006.
[9] Massoud, A.M., Finney, S.J., Williams, B.W.,Control
Techniques
for
Multilevel
Voltage
Source
Inverters,2003.
[10] Kose, B. K., Modern Power Electronics and AC
Drivers, Prentice-Hall PTR, America, 2002.
[11] Üstün, S. V.,Asenkron Motorun DSP (Sayısal İşaret
İşlemci) Temelli Kontrolünde Yapay Sinir Ağları ve
Genetik Algoritmalar Kullanılarak PI Katsayılarının
Optimizasyonu, Doktora Tezi, Yıldız teknik Ünivesitesi,
Fen Bilimleri Enstitüsü, İstanbul,2001.
[12] Wang, J., Kang, L., Cao, B., Neural Network PID
Control of a Distributed Power Generation System
Based on Renewable Energy, Journal of Applied
Science, vol.5, pp.1772-1776, 2005.