MARS EXPLORATION ROVERS
MARS KEŞİF ROBOTLARI PROGRAMI
Çok eskilerden beri insanlığın ilgisini cezbeden Mars gezegeni, gerek Dünyamıza
yakınlığı, gerekse benzerliği nedeniyle kardeş gezegenimiz olarak anılır. Adını kırmızı
rengiyle Yunan mitolojisindeki savaş tanrısından alan Mars, dünyaya yakınlığı nedeniyle de
daha ilk astronomlar tarafından bile ilk teleskoplarla gözlemlenmeye başlamıştır.
1960’lı yıllarda kademeli roketlerin geliştirilmesiyle uzay yarışının soğuk savaşın bir
parçası haline gelmesi ve dünya sahnesinde güç gösterisine dönüşmesi hiçte beklenmedik bir
durum değildi. Dünya’nın tek doğal uydusu Ay’a düzenlenen görevlerin her biri çıtayı bir
basamak üste çekiyor, yarışa ivme kazandırıyordu. Görece yakın olması ve 10 yıllık bir
dilimde Ay’ın keşfinde birçok ilerleme kaydedilmesi sonrasında yarışın iki kutbu; ABD ve
SSCB’nin komşu gezegenlere olan yönelimi arttı. Teknikte üstün olan ülke yarışı önde
götürüyordu. Mekanik mühendisleri ise bu yarışın şüphesiz kilit insanlarıydı. Yüzlerce tonluk
roketleri Dünya’nın çekim alanından kurtarmak ve diğer gezegenin çekim alanına istenilen
yerde sokmak hayli zor bir işti. Uzay Mühendisliği(Aerospace Engineering) alanının doğuşu
da bu şekilde oldu.
Günümüze kadar Mars’a yaklaşık 50 görev düzenlendi, fakat bunların üçte ikisi
başarısız oldu. Hatta bu yüzden Mars zaman zaman uzay aracı mezarlığı diye anılmaktadır.
Buna rağmen bu gezegeni bizim için bu kadar çekici kılan ne? Neden bu kadar üzerinde
duruyor, milyon dolarlar harcıyoruz? Basitçe ‘’Bir zamanlar orada hayat var mıydı?’’
sorusuna aranan yanıttır. Esasen sorumuzu ‘’Dünya dışında bir yerde hayat gelişebilir mi,
yoksa güneş sisteminde yalnız mıyız?’’ şeklinde daha kapsamlı hale getirmek yerinde
olacaktır.
Bahsi geçen soruları başka bir gezegen ya da gök cismi değil de Mars için sormamızın
sebeplerine değinelim kısaca.
Güneş sistemimizde canlı hayatı destekleyen, organik tepkimelerde başrol oynayan bileşiğin
‘’Sıvı Su’’ olduğunu biliyoruz. Sıvı suyun bulunabileceği sıcaklıkların 0 ila 100 °C arası
olduğunu da. Bütün bu çalışmaların sebebi de burada yatıyor; Mars, Güneş sistemimizde bu
sıcaklığın bulunabileceği bir aralıkta bulunuyor.
Yine aynı şekilde, ‘’Eğer Dünya yaşanmaz bir yer haline gelirse, Mars insanlık için alternatif
bir yaşam yeri olabilir mi?’’ sorusu son yarım yüzyılda üzerinde durulan bir konu haline
gelmiştir.
Mars Gezegeninin Özellikleri
Kayalık gezegenlerin dördüncüsü, yörünge uzaklığı olarak Güneş’ten itibaren
dördüncü sırada,
6780 km’lik ekvatoral çapıyla dünyanın yaklaşık yarı boyutunda ve yaklaşık 1/3
kütlesine sahip,
Yörünge ortalama yarıçapı 227,7 milyon km,
Yörünge periyodu 687 dünya günü,
1 günü 24 saat 39 dakika
Atmosfer bileşimi %95,3 CO2, %2,7 N ve %1,6 Ar ve diğer gazlar,
Atmosfer basıncı dünyanınkinin 1/1000’i kadar,
Zaman zaman hızı 40 m/s’yi bulan kum fırtınaları ve küçük hortumlar meydana
geliyor,
Yüzey sıcaklığı gün içerisinde -127 ila +18C arasında değişiyor.
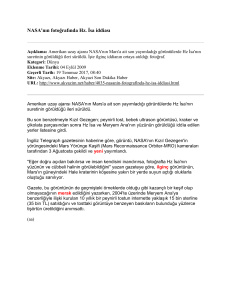
Resim 1: Mars Gezegeni. Resimde görülen, gezegenin ekvatorunun üçte birini kaplayan
vadi ise Valles Marineris vadisidir. 4000 km’lik uzunluğu, 200 km’lik genişliği ve 7
km’lik derinliği ile güneş sisteminde bilinen en büyük yarık sistemidir.
Genel olarak özelliklerine baktığımızda Mars gezegeninin bize niçin çekici geldiğini daha
iyi anlayabiliyoruz.
NASA’NIN KEŞİFÇİ PROGRAMI
Son yarım asırda büyük çoğunluğu başarısızlığa uğrayan görevlerden sonra NASA 2000
yılında yeni ve donanımlı bir keşifçi gönderme projesine başladı. Bu görev için Pasadena’daki
JPL(Jet Propuslion Loboratory-Jet İtiş Laboratuarı)’de bir grup mühendis toplandı ve projenin
başına Cornell Üniversitesi’nden Prof. Steve SQUYRES getirildi.
Daha önce de bahsedildiği gibi, Mars’a yapılan görevlerde başarısızlık oranı çok yüksekti.
Yapılan son üç görevden birinde yörüngeci (Mars Climate Orbiter, Aralık 1998) İngiliz ve
metrik ölçü sistemi arasındaki bir karışıklıktan dolayı atmosfere girip yandı, diğerinde ise
sonda (Mars Polar Lander, Ocak 1999) gezegenin yüzeyine çarparak parçalandı. Ama şanslı
bir şekilde, başarılı olan bir görev vardı. 1996 yılında, ilk hareketli keşifçiyi taşıyan Mars
Pathfinder görevi amacına ulaşmıştı.
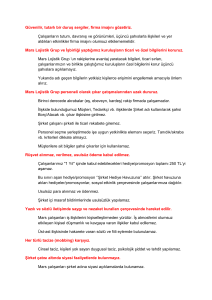
Resim 2: Mars Pathfinder, Sojourner Rover ile birlikte. (NASA 1997)
Son iki görevdeki başarısızlık ve Pathfinder’daki başarının sağladığı veriler ışığında NASA
bu defa şansı ikiye katlamak adına gezegenin farklı yerlerine birbirine eş iki keşifçi yollamaya
karar verdi. Fırlatma takvimi ise 2003 yazı olarak belirlendi. Özetle, Squyres ve ekibinin Mars
yüzeyine inip keşif yapacak iki keşifçi inşa etmeleri için 3 yıldan daha az süreleri vardı. Tabii
tek zorluk bu değil, Mars oldukça soğuk, neredeyse havasız, oldukça engebeli ve talk pudrası
inceliğinde tozla kaplı bir yer. Robotlarınızın zaman zaman Dünya’dan 375 milyon km uzakta
bütün bu koşullarda çalışabilecek dayanımda olması gerekir. Bununla birlikte ilk etapta
sarsıntılı bir fırlatılışı, 480 milyon km’lik yolculuğu, atmosfere girişteki sarsıntıyı,
sürtünmeden oluşan ısıyı ve en önemlisi iniş kapsülünün yüzeyle ilk temasının sağlandığı
zaman dilimindeki sarsıntıları atlatması gerekir. Bütün bu faktörler göz önüne alındığında,
uzay araçları için tasarım, konstrüksiyon ve malzeme seçimlerinin önemi daha iyi
anlaşılmaktadır.
Bu bölümden sonra bir başka gezegene gönderilen bir uzay aracının tasarım, hayata
geçirilme ve görev aşamalarıyla ilgili konular mühendislik açısından adım adım
açıklanacaktır.
1-ROKETLER
Bu görevde keşifçiler Boeing tarafından üretilen Delta II roketleriyle fırlatıldı. 3
kademeye ve 9 adet katı yakıt roketine sahip olan bu roketler, NASA’nın Keppler Teleskobu
gibi çok önemli 150’den fazla görevinde kullanılmış, başarısını ispat etmiş roketlerdir.
Resim 3: Fırlatmada kullanılan Delta II roketi ve kısımları
180 kg’lık bir keşifçiyi Dünya çekiminden kurtarıp Mars gezegenine indirmek için bu
roket toplamda 1 446 000 Newton’luk itiş uyguluyor.
Yakıt ve oksitleyici olarak ilk aşamada Kerosen ve Oksijen, ikinci aşamada
Aerozine50 ve Azot Tetraoksit, üçüncü aşamada ise katı yakıt olarak Amonyum
Perklorat ve Alüminyum kullanıyor.
1.1 Sıvı Yakıt Motorları
Birinci Aşama motoru
1.aşama bir adet Rocketdyne RS-27A ana motorundan oluşmaktadır. RP-1 (Rocket
Propellant-1) ve uçak yakıtı olan Kerosenin bir derece daha rafine halini sıvı oksijen ile
yakan bu motor 12:1 genişleme oranında çalışmaktadır. Gövdeye 1. aşama oksitleyici
tankının hemen altında merkezlenerek monte edilen RS-27A T+0’da ateşlenir, 263,4 sn
çalışarak toplam itişin %15’ini sağlar. Yakıt ve oksitleyiciyi yanma bölgesine sevketmek
için iki adet turbo-pomp kullanılır. Bu motorun durmasına ise MECO (Main Engine Cut
Off) denmektedir. Aynı zamanda hidrolik olarak tahrik edilen sistemle roketin yükseliş
esnasında gövde hareketlerini içeren(pitch-yaw) manevraları yapmasını sağlar.
Resim 4: Rocketdyne RS-27A
İkinci Aşama Motoru
2 aşama bir adet Aerojet AJ10-118K ana motorundan oluşmaktadır. RS-27A kadar
kompleks olmayan bu motorda yakıt ve oksitleyici aynı deponun bir bölme ile
ayrılmasıyla muhafaza edilir. Yakıt olarak iki özel yakıtın karışımı olan Aerozine50 ve
oksitleyici olarak Diazottetraoksit kullanır. Bu aşamanın yakıtı ileri derecede zehirli
olmasının yanı sıra özelliği, her hangi bir ateşleme sistemine ihtiyaç duymadan temas
anında doğrudan yanmaya başlamasıdır. MECO’dan sonra T+276,9. saniyede ateşlenen
bu motor, park yörüngesine yerleşme ve ayrılma olaylarındaki itmeleri kontrol ettiği için
birden çok kez ateşlenip durdurulması gerekir. Temas ile doğrudan ateşlenebildiği için bu
motorun kontrolü oldukça kolaydır. Yakıt ve oksitleyiciyi yanma odasına sevk etmek için
de pompa sistemine ihtiyaç duyulmaz, bunun yerine He ve N gazları itici olarak kullanılır.
İtici gazların tutulduğu depolar ise motor gövdesinin hemen altında yer alır.
5 dakika 2 saniye çalıştıktan sonra uzay
aracı park yörüngesine girdiği için motor
kapatılır. Uzay aracı yörüngede uygun
konuma gelince T+27dk 23 s’de tekrar
ateşlenerek aracın park yörüngesinden
ayrılarak gezegenler arası yörüngeye
girmesi sağlanır. 2 dakika 4 saniye süren bu
ateşleme ile toplamda 43,6 kN itme
uygulayan motor, sonrasında T+30dk
22s’de 2. Aşama ile araçtan ayrılarak
boşluğa bırakılır.
Resim 5: Aerojet AJ10-118K
Üçüncü Aşama Motoru
Delta II roketlerinin 3. aşaması bir katı yakıt roketinden oluşmaktadır. Bu aşamanın
amacı, park yörüngesinden ayrılan araca son bir ivme vererek hız kazanmasını ve barındırdığı
Spin-Control sistemi ile gezegenler arası yörüngesinin kararlı hale gelmesini sağlamaktır.
Spin-Control sistemi aşama ayrılmadan hemen önce ivmelenme esnasında araca 60 d/d’lık bir
dönme hareketi yaptırır. Bu hareket aracın yörünge doğrultusunda momentumunu koruması
ve yolculuğu esnasında Güneş’ten zarar görmeden enerjisini sağlayabilmesi için önemlidir.
Yakıt olarak Amonyumperklorat ve Alüminyum, oksitleyici olarak ta Hidroksil
emdirilmiş Polibütadien kullanır. Yaklaşık 86 s çalışan bu motor 66 kN’luk bir itme
sağlayarak araca son bir hız kazandırır.
1.2 Dış Katı Yakıt Roketleri
Delta II roketlerinde fırlatılacak yüke bağlı olarak birkaç farklı segment katı yakıt
roketleri kullanılmaktadır. Bu görevde ise GEM-42 (Graphite-Epoxy Motor) kullanılmıştır.
Toplam itişin %82’sini sağlayan katı yakıt roketleri, adından anlaşılacağı üzere sıvı değil katı
yakıt yakarlar ve birim ağırlıkları başına göre sıvı yakıtlı roketlere oranla daha fazla itiş
sağlarlar. Bu yüzden atmosferin en yoğun ilk 100 km’lik kısmını aşmak için bu roketlerden
yararlanılır. Ana motorlarla birlikte ateşlenir ve 72 saniye sonra atılırlar.
Katı yakıtlı dış roketler yakıt olarak Amonyumperklorat ve Alüminyum, oksitleyici
olarak ta Hidroksil emdirilmiş Polibütadien kullanırlar. Üretilmeleri kolaydır, nispeten daha
az tehlike arz ederler. Gövde silindirinin içine oksitleyici çubuklar halinde yerleştirilir. Kalan
boşluğa ise yakıt akışkan bir kıvamdayken dökülür. Bu şekilde elde edilen katı yakıt iticileri,
birinci aşama oksitleyici tank hizasına toplam 9 adet olmak üzere çepeçevre sabitlenir.
Katı yakıt roketleri ucuz ve güçlü olmalarına karşın bir kez çalıştırıldıkları zaman,
yakıt bitene kadar durdurulamazlar. Bunun sebebi yakıt ve oksitleyicinin bir arada bulunması
ve reaksiyonun oldukça hızlı gerçekleşmesidir. Bu yüzden fırlatma esnasında ana motorlar T0,3 s’de çalışmasına karşın katı yakıt roketleri T=0 anında ateşlenirler.
Resim 6: Delta II roketlerinde kullanılan GEM-42 katı yakıt roketleri
2-SEYİR ve YOLCULUK
2.1 Seyir ve Rotasyon
Uzay araçlarının motorlarını Mars’a kadar ateşleyemezsiniz, buna gerekte yoktur
zaten. Aracı Mars’a doğru Güneş’i merkez alan bir yörüngeye oturtursunuz ve Mars’a kadar
süzülmeye bırakırsınız. Bu ve diğer görevlerde yapılan tam olarak buydu.
Mars ve Dünya, birbirlerine göreli yörünge periyotları sebebiyle yaklaşık 2 yılda bir
yakın konuma gelirler. Yakın konuma geldikleri süredeki en yakın 8-15 günlük periyoda ise
fırlatma penceresi adı verilir. Diğer gezegene ulaşmak için bu pencere içinde fırlatma
yapılmalıdır. Aksi takdirde kullanılan roketlerin araçlara kazandırdıkları hız yeterli
gelmeyecektir.
Resim 7: Fırlatma ve yolculuğa ait plan
Fırlatmadan sonra aracın seyri esnasında belli kritik noktalarda yörüngesinde küçük
düzeltmeler yapılır. Bu sayede görev yeri olan gezegende hedeflenen noktaya tam olarak
varabilmesi sağlanır. Bu düzeltmeler seyir modülünün çevresinde çeşitli yerlerde bulunan
mini roketlerin anlık olarak ateşlenmesi ile yapılır.
Yörünge düzeltme işlemlerini ve konum belirlemeyi sağlamak için araçlarda bir
navigasyon sistemi vardır. Bu navigasyon sistemi Dünya’da programlanan ateşleme ve
yönelim işlemlerinin kesin olarak zamanlamasını yapar. Bu hesaplamaları yaparken kendi
konumlama sistemini kullanır. Araçlarda yıldızlara odaklı ve güneş merkezli olmak üzere iki
ayrı konumlama sistemi mevcuttur.
Yıldızlara dayalı konumlama sisteminde yıldızların yerleri, birbirlerine göre konumları
ve aralarındaki açı hesaplanarak kesin olarak konumlama mümkündür.
Güneş merkezli konumlama sisteminde ise araç fırlatma parametrelerini ve Güneşin
konumunu kullanarak daha küçük ölçekte konumunu belirler.
Nitekim fırlatmanın henüz ikinci ayında Güneşte meydana gelen büyük bir patlama
sonucu uzaya saçılan çok büyük miktarda yüklü parçacık ve kozmik ışınların, uzay araçlarının
belleklerine zarar vermemesi ve yüksek parlaklıktaki patlamayı yıldız olarak algılayarak
yörüngeden sapmamaları için Güneş merkezli konumlama sistemine geçilmiştir. Patlamanın
savurduğu parçacık ve ışınların etkisi geçince araçların bilgisayar belleklerine sırasıyla reboot
yapılarak patlamanın -az bile olsa- verdiği zarar düzeltilmiştir.
Resim 8: Tipik bir güneş patlamasında gezegenler arası ortama saçılan yüklü parçacık ve
plazma.
Seyir esnasındaki önemli noktalardan biri de aracın sahip olduğu spin hareketidir.
Roketin üçüncü aşamasının ayrılma mekanizmasıyla birlikte çalışan küçük iticiler sayesinde
sağlanan spin hareketi, uzay aracının tıpkı bir merminin yivli bir namludan çıktığı anki
hareketi yapmasını sağlar. Balistik bilminde bu spin, merminin yörüngesinde kararlı
olabilmesi için gereklidir. Hız doğrultusundaki eksende verilen dönme hareketinin araca
kazandırdığı jiroskopik momentum, yörüngeden sapmaya sebep olacak her türlü kuvvete karşı
koyarak aracın kararlı hareketine devam etmesini sağlamaktadır.
Resim 9: Uzay aracının ilerleme doğrultusundaki spin hareketi
Uzay aracının spin hareketinin bir gerekçesi de aracın güneş etkilerinden minimum
düzeyde etkilenmesini sağlamaktır. Gezegenler arası uzayda seyir esnasında sıcaklık aracın
güneş gören tarafında +250 °C civarındayken güneş görmeyen tarafında -250 °C’yi
bulmaktadır. Bu kadar uç sıcaklık değerlerine aynı anda maruz kala araçların sürekli aynı
kısımlarının bu sıcaklıklara maruz kalması istenmeyen durumdur. Bu spin hareketi sayesinde
sürekli aynı kısımların maruz kalması yerine devinim halinde aracın her yeri güneşe eşit
oranda maruz kalmaktadır.
2.2 Seyir Esnasında Enerji
Uzay araçları seyir esnasında Dünya ile iletişim kurmak, kendilerini sıcak tutmak,
bilgisayarların ve navigasyon sisteminin çalışır halde kalmasını sağlamak için enerjiye ihtiyaç
duyarlar. Bu enerjiyi seyir modülünün arkasında bulunan güneş panellerinden sağlarlar.
Yaklaşık 2,65 m çapa sahip dairesel şekilli bu güneş paneli seti, araca Dünya yörüngesi
yakınında 600 W/sa, Mars yörüngesi yakınında 300 W/sa enerji sağlayabilmektedir.
Resim 10: Uzay aracı seyir modülü ve bileşenleri
Yine de aracın bazı kritik dış enstrümanlarını sıcak tutabilmek için bazı noktalarda
termonükleer hücrelerden yararlanılmaktadır. Bunun sebebi, robot kol ucundaki enstrümanlar
gibi aracın ana gövdesi içinde bulunmayan ve genel sıcaklıktan ısı paylaşımı ile
faydalanamayan kısımları da olması gereken sıcaklıkta tutmaktır.
Termonükleer Hücreler
Termonükleer hücreler, nispeten orta derece yarılanma ömrüne sahip radyoaktif
elementler (238Pu) içerir. Bu elementlerin bozunurken açığa çıkardığı ısı, termonükleer
hücrelerde hareketli mekanik parçalar olmaksızın doğrudan elektriğe dönüştürülür. Buradaki
prensip, yüzeyleri farklı ısılara sahip iki farklı metal plakanın arasında enerji farkı nedeniyle
yüklerin sıcak alandan soğuk alana doğru ilerlemesidir. Özellikle serbest elektronu fazla olan
metallerin ürettiği güç daha fazla olmaktadır.
Bazen de robotlardaki küçük enstrümanlar gibi yerlerde elektrikten ziyade,
enstrümanın çalışma sıcaklık aralığında kalabilmesi için sadece açığa çıkan ısıdan yararlanılır.
Yarılanma ömrü orta dereceli elementler oldukları için de tehlikeli radyasyon seviyesi (α, β ve
γ emisyonları) oldukça düşüktür. Öyle ki; 238Pu kullanılan yerlerde 2,5 ila 25mm’lik bir grafit
kaplama radyoaktif sızıntıyı önlemek için yeterli olmaktadır.
3-ATMOSFERE GİRİŞ, ALÇALMA VE İNİŞ (ENTRY, DESCENT AND LANDING)
Görevin bilim adamlarınca en zor kısmı olan giriş, alçalma ve iniş kısmı sadece altı
dakika sürmektedir. Projede görev alan mühendisler ve bilim adamları, gezegenler arası
uzayda süren yedi aylık zorlu yolculuktan sonraki bu kısacık zaman dilimini ‘‘Altı dehşet
dakikası’’ olarak nitelemektedirler. Altı dehşet dakikası, gezegene göreli saatte 20.160 km
hızla atmosfere girip zemine temas anına kadar olan sarsıntılı, aşırı sıcak ve aerodinamik
kuvvetlerce zorlanmış aşamadır.
Bu aşamayı çok daha kritik hale getiren ise, modüle hiçbir şekilde eşzamanlı kontrol
yapılamıyor olmasıdır. Giriş olayının gerçekleştiği zaman diliminde Dünya ile Mars arasında
iletişim ya da komut için bir sinyalin tek yönlü varış süresi yaklaşık 13 dakikadır. Bu yüzden
araç telemetri verileri doğrultusunda tamamen uçuş ve EDL programının kontrolündedir.
3.1 Atmosfere Giriş
7,5 ay ve yaklaşık 480 milyon km’lik yolculuğun ardından uzay aracı ses hızının 16,5
katı bir hızla(mach 16,47) atmosfere giriş yapar. Girişten 30 dakika önce araca enerji ve
konum bilgisi sağlayan seyir modülü araçtan ayrılır. Bu, hızın da biraz düşmesini sağlar. Son
konum düzeltmeleri arkada yer alan küçük iticiler aracılığıyla yapılır.
Gezegenin atmosferine hasarsız olarak girebilmek için giriş açısı 18,5 ila 20°’dir.
Oldukça hassas ayarlanması gereken bu değer daha büyük olursa, araç atmosfere çarpma
etkisiyle parçalanacaktır. Eğer daha küçük olursa bu sefer de su üzerinde sektirebildiğimiz
taşlar gibi atmosferin üst kısmından sekecek ve giriş yapamayacaktır.
Gezegenler arası yörüngeden Mars’ın çekim alanını, oradan da atmosferde doğru giriş
noktasını doğru açıda yakaladıktan sonra araç atmosfere girer. Giriş olayı oldukça sarsıntılı
bir olaydır. Bu sebeple araçların, fırlatmadan daha sarsıntılı bir olayı atlatması gerekmektedir.
Giriş esnasında aracın sahip olduğu 2 d/d’lık dönme hareketi, atmosfere doğru noktada
girilmesine ve ilk temas sarsıntısının yörüngeden saptırma gibi etkilerini en aza indirilmesine
yardımcı olur.
3.2 Alçalma
Alçalma hipersonik( ≥ mach 5), süpersonik( ≥ mach 1) ve sesaltı( ≤ mach 1 ) olmak
üzere üç aşamada gelişir. Atmosfere bir merminin 6 katı hızla giren aracın, bu aşamada hızı
gittikçe azalmakta ve vektörel olarak gittikçe düşeye doğru yönelmektedir.
Isı Kalkanı
Giriş +102 s’ye kadar ısı kalkanı sebebiyle araç alevlerle çevrili bir şekilde yol alır. Isı
kalkanının alev alması istenmeyen değil, aksine istenen bir durumdur. Isıya karşı koyacak bir
kalkan tasarımı, yalıtım malzemeleri sebebiyle nispeten daha ağır olacaktır. Aracın hem
dengesini hem de fırlatma maliyetini etkileyen bu faktör göz önüne alındığında alev alan tip
ısı kalkanı kullanmak daha uygun olmaktadır. Bu ısı kalkanındaki temel mantık, kalkanın
kararsız bileşiklerden imal edilmiş olması, atmosferde ilerlerken de ısı ve sürtünmenin
etkisiyle bu bileşiklerin atmosferin içerdiği elementlerle tepkimeye girmesidir. Tepkime
sonucu ortaya çıkan maddeler gaz ve plazma şeklinde kalkan yüzeyinden ayrılırken ısıyı da
araçtan uzaklaştırmış olur. Bu sayede araç aşırı ısıdan korunmuş olur.
Bu tip ısı kalkanları NASA’nın 1960-70’li yıllarda gerçekleştirdiği insanlı-insansız
Mercury, Gemini, Apollo ve SkyLab programlarında kullanılan kapsüllerdeki ile aynı
teknolojiye sahiptir. Fark ise Dünya ile Mars atmosfer içeriğinin farklı oluşundan dolayı
kullanılan bileşiklerdedir. Dünya atmosferi O2 ve N2 üretirken Mars atmosferi CO2 ve N2
üretir. Ayrıca Mars atmosferinde gezegenin yüzeyinden rüzgarla kalkan ince tozlar fazlaca
bulunduğu için oluşan plazma daha ağır karakterli ve aerodinamik fren etkisi daha fazladır.
Giriş +102 saniyeye kadar olan plazma ve alev teması süresince araca 6,2 g’lik bir ivme
etkir(ġdünya ≈ 9,80665 m/s2).
Paraşüt
Giriş +244 s’de araç 125 km irtifadan yaklaşık 9,5 km’lik irtifaya alçalmış ve hızı 430
m/s’ye kadar(mach 1,26) düşmüştür. Aerodinamik etki ile epeyce yavaşlayan aracı daha da
yavaşlatmak için bir süpersonik paraşüt kullanılır. Ses hızından daha yüksek hızlarda açılıp
aracı yavaşlatmak ve aracı daha stabil hale getirmek için özel olarak tasarlanmış bu paraşütün
tasarımına ‘’Esnek Disk Boşluğu’’ adı verilmektedir.
Resim 11: Tasarlanan paraşüt rüzgar tünelinde test edilmekte.
Bu paraşüt tasarımını özel kılan, iki ayrı kısımdan oluşuyor olmasıdır. Kubbe
biçiminde baş aşağı duran kısım havayı tutarak esas yavaşlatmayı, boşluktan sonraki esnek
disk kısmı ise yüksek hızda türbülansın etkilerini azaltarak aracı stabil halde tutmayı
sağlamaktadır.
Paraşütün tepesinde bulunan dairesel boşluk, paraşütün çok fazla gerilmeye maruz kalarak
zarar görmesini engeller. Zira tasarlanan paraşütlerden test aşamasında boşluğun küçük
olduğu modeller parçalanmış, fazla büyük olduğu modeller ise ‘‘Mürekkep Balığı Etkisi’’
denen etkiye maruz kalarak hiç açılamamıştır.
Model olarak paraşüt tasarımı tamamlandıktan sonra malzeme seçimi oldukça önemli
hale gelmiştir. Tasarlanan paraşüt ses üstü hızda açılıp aracı yavaşlatacak kadar sağlam, ısı ve
Mars atmosferinin korozif etkilerine dayanıklı ve aynı zamanda 35 cm çapında ve 45 cm
yüksekliğinde bir çantaya sığacak boyutta olmalıdır.
Seçilen malzemeler Mars Pathfinder görevinde kullanılan paraşütle aynı olmak üzere büyük
ölçüde Naylon ve Polyester’dir. Bu malzemelerin özelliği yüksek aerodinamik gerilme
dayanımlarına karşın oldukça hafif ve küçük hacme sığabiliyor olmalarıdır.
Paraşütün halatları ise Zylon adı verilen özel bir maddeden yapılmıştır. Zırh üretiminde
kullanılan Kevlar benzeri bir madde olan Zylon 5,8 GPa gibi yüksek bir çekme dayanımına
sahiptir(1,6 x Kevlar). Tepe noktasından toplanma noktasına kadar uzanan halatların arası
paraşütü güçlendirmek adına paraşüt üzerinde örümcek ağı gibi örülmüştür. Bu sayede ilk
açılma anındaki ani gerilmenin koparıcı etkisinin önüne geçilmiştir. Paraşüt halatlarını araca
bağlayan 3 adet kablo ise Kevlar’dan yapılmıştır. Bu kablolar ısı kalkanı atıldıktan sonra
aracın doğru pozisyonda kalabilmesi için kendini düzeltmesine yarayan makaralara bağlıdır.
Bu makaraları da üç ayrı motor kontrol etmektedir. Konstrüksiyonu tamamlanan paraşüte
araca monte edilmeden önce sterilizasyon için ısı uygulanmıştır.
Giriş +244 s’de açılan paraşüt sonrası Giriş +264 s’de ısı kalkanı atılır. Yaylar ile ön
gerilmeli olarak bağlanmış 6 piroteknik cıvatanın kesilmesiyle ısı kalkanı araçtan ayrılır.
Ayrılan ısı kalkanının etkisiyle modülün içine doğrudan çarpan hava da saptırılarak bir miktar
fren sağlamaktadır.
Giriş +264 s’de keşifçinin içinde bulunduğu kapsül araçtan ayrılır. Düzgün dörtyüzlü
şekle sahip olan kapsül bir kablo ile asılı şekilde aşağı sarkar. Yaklaşık 2,4 km irtifada
telemetriye iniş radar sistemi dahil olur. Bu sistem hava yastıklarının patlatılması, ters
roketlerin ateşlenmesi ve kapsülün serbest bırakılması için irtaifa bilgisi sağlar. Sonrasında
dahil olan iniş görüntüleme sistemi ise arazinin fotoğraflarını çekerek iniş alanını görüntüler.
Resim 12: İniş modülü araçtan ayrılmış durumu.
EDL telemetrisinin zamanladığı son şey ise 0,5 s arayla hava yastıklarını patlatmak,
ters roketleri ateşlemek ve modülü serbest bırakmaktır. Yaklaşık 120 m irtifada hava
yastıkları patlar, 0,5 s sonra ters roketler ateşlenir. Yaklaşık 12 m yüksekliğe kadar inildiğinde
ise kapsül hava yastıkları üzerine serbest bırakılır.
Ters Roketler
Ters roketlerin kullanım amacı, Dünya’nın %0,1 yoğunluğuna sahip Mars
atmosferinde paraşütün aracı yeterince yavaşlatamamasıdır. Toplamda üç adet olan ters
roketlerden biri diğerlerine göre daha güçlüdür. Bunun sebebi aracı tamamen düşey olarak
serbest bırakmak yerine eğik olarak araziye yuvarlamaktır. Düşey yönde hızı iyice yavaşlayan
araç, güçlü roket sayesinde kabloda asılı olan kapsülü sarkaç gibi hafifçe savurarak
yuvarlanmasını sağlar.
Resim 13: Ters roketlerin aracı yavaşlatması.
3.3 Yüzeyle Temas ve İniş
Gezegene iniş için roket kontrollü hassas iniş sistemi bu projede kullanılmamıştır.
Mars Pathfinder göreviyle özdeş olarak; keşifçilerin içinde olduğu düzgün dörtyüzlü şekle
sahip kapsül etrafında hava yastıkları ile yüzeye belli bir yükseklikten bırakılır. Hava
yastıklarıyla çevrili kapsül zemine çarpar, arazide seker. 700 ila 1000 m arasında arazi
boyunca seken kapsül durana kadar sinyal bozukluğunun önüne geçmek için Dünya ile
iletişime geçmez. Ancak kapsül durduğunda gelen sinyal kapsülün hasarsız olarak yüzeye
indiğini teyit eder.
Kullanılan hava yastıkları araçlarda güvenlik için kullanılan hava yastıklarıyla aynı
sistemde çalışmaktadır. Bir gaz jeneratörü veya basınçlı depolanmış bir ortamdan birden
serbest bırakılan gaz kısa bir süre içerisinde yastık hacimlerini doldurur. Ancak araçlarda
kullanılan sistemden farklı olarak keşifçilerin kapsüllerinde kullanılan hava yastıkları arazi
yüzeyi ile temas etmektedir. Bahsi geçen temas sadece dokunma değil, sürtünme, çarpma ve
sürüklenme gibi kütlenin serbest hareketine bağlı şekillerde gerçekleşmektedir. Bu yüzden
kullanılacak hava yastıklarının konstrükte edileceği malzemeler oldukça önem arz etmektedir.
Mars Pathfinder görevinde olduğu gibi bu görevde de hava yastıkları ‘‘Vectran’’ adı
verilen özel bir sentetik malzemeden yapılmıştır. Vectran, kevlar gibi diğer sentetik
malzemelere kıyasla yaklaşık iki kat daha güçlüdür. İpliklerinin birim kalınlıkta çekebildiği
yük kevların 2 katıdır.
Vectran adlı materyalden imal edilmiş küresel hava yastıklarının yerleşimi, düzgün
dörtyüzlü kapsülün her bir yüzünde 6’şarlı loblar şeklindedir. Her bir yüzeyde 1,8 m çapında
6 adet küresel yastık bulunur, her bir yastık kutup bölgelerindeki dairesel parçalar hariç 7
parçanın bir araya getirilmesiyle oluşturulmuştur. Her bir yüzeydeki yastıklar doğrudan
kapsüle değil, çapraz olarak öncelikle diğer yüzlerdeki yastıklara bağlıdır. Bu, gaz içeriği
olarak ta birbirine bağlı durumda olan yastıklara hem çarpma etkilerinde daha fazla esneklik
sağlar, hem de genel itibariyle yastıkların kapsül etrafında alacağı şekli belirler.
Resim 14: İnişten sonra hava yastıklarının durumu.
Kapsül arazi boyunca sekip stabil hale geldikten sonra keşifçi iniş teyit sinyalini iletir.
Bu teyitten bir süre sonra hava yastıklarının içerisindeki gaz boşalarak yastıklar iner. Bunu
kapsülün açılması ve keşifçinin aktif hale gelmesi izler. Kapsül, keşifçi tabanı alta gelecek
şekilde tepede birleşen dört ayrıtın ayrılmasıyla açılmış olur. Kapsülden hemen sonra da
keşifçinin güneş panelleri açılır.
Resim 15: Kapsül açılmış durumda.
Kapsül açılır açılmaz keşifçi güneş panellerini açmaktadır. Kamera direğini açma ve
yüzey operasyonlarından önce ihtiyaç duyulan gücü sağlayabilmek için gereklidir. Güneş
panellerini birbirine sabitleyen piroteknik cıvataların kesilmesiyle güneş panellerinin sırasıyla
bir ve ikinci aşamaları açılır. Bunu kamera direğinin açılması ve ilk fotoğrafların Dünya’ya
gönderilmesi izler.
Resim 16: Güneş panellerinin açıldığı durum.
4-YÜZEY OPERASYONLARI
Keşifçinin Mars yüzeyine sağlam şekilde vardığını doğrulayan sinyallerin ardından
kapsül ve keşifçinin açılması, ilk resimlerin görev kontrol merkezine ulaşmasının ardından
önce aracın tüm sistemleri gözden geçirilir. Bu kontrol, önceden belirlenmiş bir referans
ölçüme dayalı bir kontrol geriliminin sırasıyla tüm kısımlara uygulanması ve sonuçların
referans ölçümleriyle karşılaştırılması şeklindedir.
Araç atmosfere giriş +274 s’ye kadar Dünya ile iletişimini MFSK ile doğrudan
gerçekleştirir. MFSK(Multiple Frequency-Shift Keying) verileri Binary kod sistemine göre (1
ve 0) taşıyan sistemdir. Veriler log2(M) bağıntısına göre dalga boyuna göre kodlanarak
iletilirler. Bağıntıdaki M değeri 2 ila 64 bit arasında değişmektedir. MFSK sistemi UHF ve
VHF üzerinden, telefon bankacılığı gibi görüşmelerde yapılan tuşlamaların karşı tarafta
çözümlenmesine dayalı sistemi ile aynı prensipte çalışır.
Giriş +274 s’den itibaren ise verilerin bir kısmını o zaman diliminde araç üzerinden
geçmekte olan Mars Global Surveyor(NASA 1996-2006) uydusu üzerinden gerçekleşmiştir.
Bu sayede doğrudan Dünya ile iletişimdeki enerji sarfiyatı fazlalığının bir miktar önüne
geçilmiş olur. Güneş panelleri ve kamera direğinin açılması ve ilk resimler MGS üzerinden
görev kontrol merkezine iletilmiştir.
Güneş panellerinin açılmasını kamera direğinin(MAST) ve High-Gain Antenna radyo
anteninin açılması ve oryantasyonu izler. Aktif hale gelen panoramik ve stereo kameralar ile
iniş alanı ilk kez fotoğraflanır ve görev kontrol merkezine gönderilir. Çekilen fotoğraflardan
elde edilen arazi bilgisi keşifçileri karakterize etmekte kullanılır.
Keşifçiler hareket sistemi yazılımları gereği arazi koşullarına göre yapacakları hareket
ve dönüşleri kendileri belirlerler. Örneğin hareket güzergahında bulunan bir taş için; üç
boyutlu fotoğraflarına göre büyüklüğünü değerlendirip üzerinden geçmeyi ya da etrafından
dolaşmayı tercih edebilirler.
Keşifçilerin karakterizasyonu sonrasında üzerlerinde bulunan enstrümanların
kalibrasyonu yapılır. Her enstrümanın kalibrasyon için özel değeri vardır. Bu değer mevcut
yerden okunarak kalibrasyon tamamlanmış olur.
4.1 Keşifçinin Yapısı ve Donanımları
Keşifçiler 180 kg kütleli, üzerlerinde güneş panellerinin yayılı vaziyette açık kaldığı 6
tekerlekli robotlardır. Temaslı analiz yapabilmek için önlerinde bir robot kol bulunur.
Üzerlerinde bulunan donanımlar gövde üzerinde bulunanlar ve robot kol üzerinde bulunanlar
olmak üzere iki kısımdan oluşur. Gövde üzerindeki donanımlar uzaktan analiz veya iletişim
amaçlı enstrümanlardan oluşur. Robot kol üzerinde bulunan enstrümanlar ise temaslı ve
yakından analizler için kullanılmaktadır.
Resim 17: Keşifçinin donanımları.
4.1.1 Yapısal Donanımlar
Her bir keşifçi 180 kg kütleli, güneş enerjisi ile çalışan 6 tekerlekli robotlarıdır. Gövde
ve diğer uzuvların yapımında kullanılan temel malzeme Alüminyumdur. Alüminyumu bu
konstrüksiyonda avantajlı kılan, ısı dalgalanmalarından nispeten az etkilenmesi ve kütlesine
göre mukavemetinin yüksek olmasıdır.
Enerji
Enerji sağlayan güneş panelleri 6 kısım halinde aracın üst yüzeyindedir. İki adet 7,15
kg kütleli Lityum-iyon bataryaları şarj eden paneller, gün içerisinde 0,3 ila 0,9 kWh arasında
güç üretir. Hareket için 100 W güç tüketen keşifçi, bataryalarda depolanan enerjiyi gece
kendisini sıcak tutmak için kullanır. -40 ila +40 °C çalışma aralığına sahip elektronik ve
bilgisayar donanımını uygun sıcaklık değerinde tutabilmek için 8 Radyo-İzotop ısıtıcı ünite ile
destekler. Isı kaybını azaltmak için de püskürtme altın film ile kaplanmış Silika-Aerojel
tabaka ile yalıtım yapılmıştır.
Hareket Sistemi
180 kg’lık keşifçi, oldukça engebeli Mars yüzeyinde yol alırken bünyesindeki hassas
elektronik donanım ve bilgisayar sistemini korumalıdır. İrili ufaklı taşlar içeren arazide
taşların ve diğer engebelerin oluşturacağı etki en aza indirilmelidir. Projede görev alan
mühendisler bu gereklilikler için keşifçinin hareket sisteminde, yay ve sönüm elemanlarından
oluşan süspansiyon sistemi kullanmak yerine iki aşamalı bir çözüm geliştirmişlerdir.
Çözümün ilk basamağı, tekerlek tasarımında kullanılan malzeme ve konstrüksiyonu ile
alakalıdır. Genel olarak tekerlek alüminyumdan yapılmıştır ve göbeğe spiral şeklinde kollarla
bağlıdır. Spiral şeklindeki kollar titreşimlerin üst ksımlara ulaşmadan sönümlenmesini sağlar.
Kolların arasında ise Solimid adı verilen, turuncu renkli açık hücreli bir tür köpük malzeme
vardır. Bu malzemenin özelliği silikon gibi davranarak -160 °C gibi çok düşük sıcaklıklarda
esneklik gösterebiliyor olmasıdır. Bağlantı kollarının arasını dolduran Solimid, hareket ve
engebelerden kaynaklanan titreşimleri büyük oranda sönümleyerek elektronik ve bilgisayar
donanımını korumaktadır.
Çözümün ikinci basamağı ise tekerleklerin bağımsız süspansiyonlar yerine RockerBogie adı verilen bir sistemle bağlanmış olmasıdır. Türkçesi Kaya-Teker olan bu sistem,
keşifçinin her iki tarafında Rocker ve Bogie adlı iki kısımdan oluşur. Rocker kısmı ön
tekerleklere doğrudan bağlıdır. Bogie kısmı ise her iki ucunda tekerlekler bağlı, Rocker’ın
arka uzantısına ortasından bağlanmış serbest bir kaldıraç gibidir. Bu sistemi özel yapan, her
iki yandaki Rocker’ların birbirine diferansiyel olarak bağlanmış olmasıdır. Bir tarafın β açısı
kadar yer değiştirmesi, diğer tarafın da tam tersi yönde yine β açısı kadar yer değiştirmesiyle
sonuçlanır. Örneğin keşifçinin bir tarafı 20 cm yüksekliğinde bir kaya üzerinden geçiyor ve
diğer tarafı düz zeminde yol alıyorsa, 20 cm yükselen tarafın karşıya yaptığı etki keşifçinin
toplamda 10 cm eğilmesine sebep olacaktır. Bu da engebeli arazilerde aracın dengesini %50
artıracak ve devrilme gibi riskleri aza indirecektir. Keşifçinin altı tekerleğinin de yer ile
temasta kalmasını sağlamasının yanında bu sistemin bir diğer avantajı da tekerlek
çapından(26 cm) büyük kayaların üstünden geçmesini sağlamasıdır.
Resim 18: Rocker-Bogie sisteminin çalışması.
Resim 19: Rocker-Bogie sistemi keşifçi üzerinde test ediliyor.
4.1.2 Çevresel Donanımlar
Kamera Direği(MAST)
Keşifçinin üstünde bulunan yaklaşık 80 cm yüksekliğindeki kamera direği, üzerinde
navigasyon kameralarını, panoramik kameraları ve kızılötesi izgeölçeri taşır.
Navigasyon kameraları 45° açıya sahip iki siyah beyaz kameradan oluşur. Birlikte
çalışarak stereo(3 boyutlu) görüntüler elde eden bu kameraların görüntüleri, arazi şekline göre
sürüş planını hazırlamakta kullanılır.
Panoramik kameralar insan gözü ile yaklaşık aynı özelliklere sahiptir. Aralarındaki
uzaklık, odak uzaklığı, yerden yükseklik ve açısal çözünürlük değeri(0,3 mili radyan) gibi
özelliklerle insan gözünün taklidi gibidir. Bu kameralardan 3 boyutlu olarak görüntüleri
inceleyen bilim adamları, Mars’ta çevreye bakan bir insanın gördüklerine en yakın görüntüleri
elde ederler. Elde edilen görüntüler aynı zamanda navigasyon için de kullanılır.
Resim 20: Kamera direği üzerindeki kamera barında Navigasyon(içte) ve Panoramik(dışta)
kameralar.
Kamera barının arka kısmında bir Mini-termal emisyon spektrometresi(Mini-TES)
bulunur. Bu spektrometre kızılötesi duyarlılığa sahiptir. Her madde sıcaklık değerine göre
belli miktarda kızılötesi ışınım yapar. Her elementin yaydığı ışınımın kızılötesi spektrumda
belli bir değeri vardır. Mini-TES, sıcaklığa göre bir taş veya her hangi bir hedefin yaydığı
ışının dalga boyuna göre, 90 m’ye kadar mesafeden içeriği hakkında bilgi edinilmesini sağlar.
Böylece incelemek üzere hedefin yanına gidilip gidilmeyeceğine karar verilmiş olur.
Balık Gözü Kameralar(Haz-Cams)
Keşifçinin ön ve arkasında birer çift olmak üzere doğrudan zemine bakan ve analiz edilmek
üzere 3 boyutlu görüntü alan kameralardır. 10 cm ara mesafeye ve 2,1 mRad/piksel
çözünürlüğe sahip bu kameralar zeminden yaklaşık 50 cm yukarıda görüntü alırlar. 3 x 4
m’lik bir alanı görüntüleyip stereo görüntü elde eden kameralar yol üzerindeki engebeleri
belirler ve keşifçinin otomatik ilerleme modunda karar vermesine yardımcı olur. Platin
braketler ile doğrudan gövdeye sabitlenen balık gözü kameralar hareketsizdir.
Kalibrasyon Hedefi
Keşifçinin arka güneş panelinin sağında güneş saati şeklinde bir kalibrasyon hedefi bulunur.
Bu hem konum hem de renk olarak Panoramik ve Navigasyon kameralarının kalibre
edilmesini sağlar. Bu sayede kameralar görüntüleri doğru renk aralığında kodlayabilirler.
Resim 21: Kalibrasyon hedefi montaj öncesi.
High-Gain Anten
Keşifçinin üst kısmında sol tarafında yer alır. Verileri radyo sinyalleri aracılığıyla
binary kod sistemine göre ileten bu anten genellikle doğrudan Dünya ile iletişime
geçmektedir. İki adet motor ile konumlaması gerçekleştirilen 2 serbestlik derecesine sahip
anten, keşifçinin bulunduğu kısım Dünya’ya dönük olduğu zaman kendini Dünya’ya göre
oryante ederek iletişimi sağamaktadır.
Resim 22: Gövdenin üst kısmında bulunan High-Gain anten.
High-Gain antenin arkasına, 1 Şubat 2003 tarihinde STS-107 yörünge görevi dönüşü
sırasında 7 mürettebatıyla birlikte infilak eden Columbia Uzay Mekiği anısına Mürettebat
isimleri ve görev armasının yer aldığı bir çıkartma yapıştırılmıştır.
Keşifçi üzerinde tek parça ve hareketsiz olmak kaydıyla bir Low-Gain anten ve bir de
UHF anten bulunmaktadır. Yörüngeci iletişimlerinde az enerji tüketmek için, ya da High-Gain
anten ile iletişim kurmanın zor olduğu zamanlarda bu antenlerden yararlanılmaktadır.
Manyetik Alanlar
Mars, atmosferinde oldukça fazla toz içeren bir gezegendir. Uçuşan bu tozların büyük
çoğunluğu ise manyetikliğe sahiptir. Keşifçinin kamera direği bağlantısının tam önüne
yerleştirilmiş bir dizi manyetik alan ise incelemek üzere bu tozların bir kısmını tutar.
Manyetik kutuplanmış tozlar, gezegen jeolojisinde su geçmişine dair güçlü veriler sunan
mineraller içermektedirler. Bu yüzden bu manyetik alanlar robot kol üzerinde bulunan Alfa
Parçacık X Işını ve Mössbauer spektrometreleri tarafından incelenmek üzere ulaşılabilir
konumdadır. Manyetik tozların kalıp, manyetik olmayanların düşmesini sağlamak için bu
alanlar yatay ile belirli bir açı yapacak şekilde konumlandırılmıştır.
Resim 23: Kamera direğinin hemen önüne konumlandırılmış manyetik alanlar.
Robot Kol
Keşifçiler gezegende yol alan jeolog robotlardır. Bir gezegen üzerinde su veya iklim
geçmişine dair araştırma yapılıyorsa kayaç, toprak ve taş yapıları incelenmek zorundadır. Bu
projede çeşitli jeolojik hedefleri inceleyebilmek için keşifçilerin önlerinde bir robot kol vardır.
Üç serbestlik derecesine sahip bu robot kolun ucunda, temas ile inceleme yapan dört önemli
enstrüman vardır. Bunlardan ikisi spektrometre, biri mikroskop ve diğeri de kayaların
yüzeyini öğüterek bir miktar içini gösteren aşındırma aletidir.
Resim 24: Robot kol çalışma esnasında.
Mikroskobik Görüntüleyici
Robot kolun ucunda bulunan mikroskobik görüntüleyici, bir CCD(Charged Coupled
Device) kamera ve bir mikroskop sisteminin birleştirilmiş halidir. Topraktaki ve kayaların
üzerindeki bazı mineraller şekilleri ve görüntüleriyle oluşumları hakkında ipucu sağlarlar.
Bunun için genellikle ilk olarak toprağa ve temel kayalara bakılır.
Alfa Parçacık X ışını Spektrometresi(APXS)
Spektrometreler bazı ışınlar kullanarak maddelerin içeriklerini belirlemekte
kullanılırlar. Alfa parçacıkları radyoaktif bozunma sırasında açığa çıkar. X ışınları da
elektromanyetik ışımaların bir türüdür. Bu ışınlar atomlara çarptıklarında enerjilerinin
tamamını ya da bir kısmını bırakırlar. Tamamen soğurulduklarında, enerjilerini bıraktıkları
atomlar kazandıkları enerjiyi belirli dalga boylarında ışınım olarak yayarlar. Her element için
spektrumda belirli bir dalga boyu vardır. Spektrometrelerin alıcılarına gelen bu ışınların dalga
boylarına göre de incelenen maddenin içeriği belirlenmiş olur.
Keşifçilerdeki APXS robot kol ucunda bulunur. Oldukça küçük ve hafiftir. Bu
enstrümanın ölçümleri genelde geceleri yapılmakta ve ortalama 10 saat almaktadır. X ışını
emisyon ölçümleri ise 2-3 saat almaktadır.
Mössbauer Spektrometresi
Mars zeminindeki birçok kaya ve taş, demir esaslıdır. Aynı zamanda toprakta demir
açısından oldukça zengindir. APXS gibi robot kol üzerinde bulunan Mössbauer
spektrometresi, demir esaslı yapıları incelemek üzere özelleşmiş bir spektrometredir. Demir
esaslı maddeleri incelemek üzere özelleştirilen bir spektrometre olduğu için de veri
sonuçlarının kesinliği daha yüksek olmaktadır.
Mössbauer spektrometresiyle yapılan ölçümler, enstrümanın doğrudan maddeye
yaklaştırılması şeklinde 12 saat sürmekte ve genellikle geceleri yapılmaktadır.
Kaya Aşındırma Aleti(Rock Abrassion Tool-RAT)
Jeolojik geçmiş ile ilgili araştırma yaparken tüm veriler kayaç veya temel kaya
katmanlarının yüzeylerinde bulunanlarla sınırlı değildir. Dahası yüzeyde bulunan veriler
yeterli gelmeyebilir. Herhangi bir kaya geçmişte, su veya ıslak bir iklim sebebiyle değişime
uğramışsa da, sonrasında atmosfer ve rüzgar erozyonu bu etkileri gizleyebilir. Kesinliği
yüksek veriler elde edebilmek için kayaç ve yapıların yüzeylerinin bir miktar altına bakmak
gerekir.
Robot kolun ucunda bulunan dört enstrümandan bir olan kaya aşındırma aleti de
kayaların yüzeyini 45 mm çapında ve 5 mm derinliğinde aşındırarak geçmişteki etkilere daha
keskin bakmayı sağlamaktadır.
Resim 25: Kaya aşındırma aletinin yakından görünüşü.
Resim 26: Kaya aşındırma aleti bir kaya yüzeyine yaklaşırken.
5-BULGULAR
Keşifçiler Mars’ın ekvatoral kesimlerinde kuzey ve güney yarımkürede iki ayrı
bölgeye gönderilmiştir. MER-A Spirit güney yarımküredeki Gusev kraterine, MER-B
Opportunity ise kuzey yarımkürede Meridiani Planum(ova) bölgesine inmiştir. Görevlerin
düzenleneceği bölgeler daha önceki yörüngeci görevlerinden alınan veriler doğrultusunda
belirlenmiştir.
Yörüngecilerin spektrometreleri ve yüksek çözünürlüklü kameraları ile belirlenen
veriler doğrultusunda; Gusev kraterinin su yatakları barındırdığı için daha önce göl olmuş
olabilecek bir yer olduğu düşünülmekteydi. Meridiani ovası ise birçok temel kaya katmanı
çıkıntıları içermekteydi. Her iki bölgenin de inişte sorun çıkarmayacak düzeyde engebesiz
olması, görev bölgeleri olarak belirlenmelerinde etkili olmuştur.
Resim 27: Mars’a düzenlenmiş görevler ve gezegen üzerinde coğrafi konumları.
Keşifçilerden Spirit 4 Ocak 2004 günü, Opportunity ise 25 Ocak 2004 günü yerel öğle
saatlerinde görev yerlerine inmişlerdir.
İlk inen keşifçi Spirit’in bulunduğu bölgenin geçmişte göl olmuş olabileceği
düşünülmekteydi. Spirit kapsülden ayrılıp Mars toprağına ilk bastığında, incelemek üzere
yakında bir kaya seçilmiş ve seçilen kayaya Adirondack ismi verilmiştir. Keşifçinin görevini
yapıp yapamadığından emin olmak adına tüm enstrümanlar bu kayanın üzerinde denenmiştir.
Kızılötesi izgeölçer ile bakıldıktan sonra kayada bir KAA deliği açılmış ve yüzey altındaki
mineraller incelenmiştir.
Resim 28: Adirondack kayasının balık gözü kameralardan görünümü.
Resim 29: Adirondack üzerinde robot kol ve enstrümanları ile inceleme yaparken.
Göl olduğu düşünülen Gusev kraterinde incelenen ilk kaya, sonuç olarak bazalt
çıkmıştır. Bazalt, lav akıntılarının veya püskürmelerinin katılaşmış bir kalıntısıdır. Çökelti
tuzları bulunması beklenen bölgede incelenen ilk kayada bulgular lav kayası olmuştur.
Beklenenin aksine çıkan bu durum, keşifçiyi bilimsel getirisi olan şeylere yönlendirmeyi
gerektirmiştir. Kraterin tabanı göl tabanı gibi olması beklenirken volkanik kalıntılarla
örtüldüğü için en yakın tepelik kısımlara yönelmeliydiler. Bu yer iniş bölgesinin 2,5 km
ilerisindeki Columbia Tepeleri’ydi. Keşifçileri ömürleri boyunca ortalama 550 m yol
alabilmek için tasarlanmışlardır. Spirit Columbia tepelerine yönlendirilirken bu durum göz
önünde bulundurulmakla beraber, bir getiri için yapılmak durumundaydı. Günde en fazla 110
m yol alabilen keşifçi için zorlu bir yol olmasına rağmen görev başlamıştır.
Resim 30: Spirit’in iniş alanından Columbia Tepeleri’nin görünümü(Panoramik kameralar ile
çekilmiş).
Spirit’in Columbia tepelerine yolculuğu başladığı sırada gezegenin diğer tarafında
Opportunmity iniş yapmıştır(25 Ocak 2004). Şans eseri, Opportunity’nin kapsülü hava
yastıkları üzerinde arazide sekerken sığ bir kratere yuvarlanarak durmuştur. Eagle krateri adı
verilen bu sığ krater 22 m çapında ve 3 m derinliğindedir. Opportunity, iniş alanı bakımından
şanslı olan keşifçidir. Kapsül açıldıktan sonra keşifçinin ilk gönderdiği resimlerde krater
duvarında görülen temel kaya çıkıntıları, su geçmişi aramak için en ideal yerlerdir.
Resim 31: Opportunity’nin Eagle kraterinden çektiği ilk panoramik resimde görülen temel
kaya çıkıntıları. Zeminde görülen izler yuvarlanan hava yastıklarının bıraktığı izler, sol altta
görülen parlak cisim ise Opportunity’nin Low-Gain anteinidir.
Opportunity zemine ilk indiği zaman toprağa mikroskop ile bakmıştır. Zeminde
görülen küçük renkli küreler incelendiğinde ‘’Hematit’’ minerali içerdiği anlaşılmıştır. Krater
duvarındaki temel kaya katmanı çıkıntıları incelendiğinde ise taşların içine kekteki yaban
mersinleri gibi dağılmış1 aynı kürelerin olduğunu görmüşlerdir. Hematit, Dünya üzerinde
genelde su içeren yerlerde oluşan bir mineraldir. Katmanları daha inceledikçe Jarosit
mineraline de yoğun bir şekilde rastlanmıştır. Fe2O3 ve FeSO3 türevleri tuzlar ve çökeltiler
içeren bu mineraller sıvı halde su çözeltileri ortamı içinde oluşmuş minerallerdir.
1
Proje yöneticisi Steve Squyres’ın tabiri ile.
Resim 32: Opportunity’nin Eagle Krateri’nde zemin toprağına ilk baktığında gördüğü Hematit
minerali kürecikleri.
Kayaların jeolojik şekilleri incelendiğinde ise su aşındırma izlerine rastlanmıştır. Dünya’daki
su yataklarında bulunan kayaların aşınma şekilleri de düzgün bir şekilde oluşmuş paralel
dalga izleri şeklinde gruplanır. Aynı temel kaya katmanı çıkıntısında da bu bulguya rastlamak,
proje yöneticilerine Eagle krateri ve Mars su geçmişi ile ilgili çok fazla veri sağlamıştır.
Resim 33: Opportunity’nin Eagle Krateri duvarında incelediği temel kaya katmanı çıkıntıları
içine dağılmış Hematit ve Jarosit mineral kürecikleri. Temel kaya üzerinde paralel dalgalar
şeklinde su izleri de görülebilmektedir.
Resim 34: Spirit’in Gusev kraterinde Mössbauer Spektrometresiyle zeminde yaptığı ilk ölçüm
grafikleri.
Opportunity’nin görevi Eagle Krateri içinde sonlanmış olsaydı, keşifçilerin Mars’a
aramak için gittikleri şeye ulaşılmış, ıslak geçmişe ait yeterince bulgu incelenmiş olacaktı.
Opportunity eagle kraterinde incelemelerini tamamladıktan sonra kraterden çıkarak yakında
başka bir hedefe yönelerek görevini sürdürmeye devam etmiştir.
Spirit ise Columbia tepelerinin eteklerine gelip tırmanmaya başladığında görevin
öngörülen 90 Sol’lük süresi2 çoktan dolmuş durumdaydı. Mühendislerin keşifçiler için
gezegen üzerinde biçtikleri 90 Sol ömür sonrasında keşifçiler çalışmaya devam ediyordu.
Ancak Spirit’in açık arazide aldığı yol boyunca kendisine enerji sağlayan güneş panelleri
gittikçe tozla kaplanmaya ve güneşten yararlanma oranını düşürmeye başlamıştır. Daha az
enerjiyle daha kısıtlı aktivitelerde bulunan ve gün içerisinde daha az yol almaya başlayan
keşifçiye bir gün beklenmedik bir şekilde birden fazla küçük toz fırtınaları ve hortumlar isabet
etmiştir. Bu küçük hortumlar güneş panellerini temizleyerek güneşten yeniden daha fazla
yararlanılmasını sağlamıştır. Güneşten yararlandığı enerji oranı %30’lara düşen Spirit, birden
temizlenen güneş panelleri sayesinde kullanabileceğinden bile fazla enerji elde etmeye
başlamıştır. Bu enerjiyle birlikte gün içerisinde daha fazla yol kat etme ve daha fazla inceleme
olanağı sağlayan keşifçi, tepe yamaçlarında temel kaya katmanı çıkıntıları ve mineral
kayalarına rastlamış ve bunları incelemiştir. İnceleme sonuçları Opportunity’nin bulgularıyla
örtüşen keşifçi, Mars’ın her iki yarı küresinin de bir zamanlar zemin üzerinden akan sulara ev
sahipliği yaptığını göstermiştir.
2
1 sol: 1 Mars günü, 24 saat 39 dakika.
Resim 35: Spirit’in kendi çektiği panoramalarda tozlanan güneş panelleri(solda) ve
temizlenmiş hali(sağda).
SONUÇLAR
Her iki keşifçi de 90 sol’lük öngörülen ömürleriyle Komşu gezegen Mars’a
gönderilmiştir. Öngörülenin aksine, her ikisi de biçilen ömürlerden çok daha uzun süre görev
yapmışlardır.
Görev süreleri boyunca Spirit ve Opportunity keşifçilerinin sağladığı verilerle, daha
önce tamamlanmış ve devam eden görevler, yüzeyde Viking 1, Viking 2, Mars Pathfinder,
Phoenix Mars Lander, yörüngede Mars Global Surveyor, Mars Oddyssey, Mars Express, ve
Mars Reconnaissance Orbiter keşifçilerinin sağladığı veriler birleştirilerek Mars gezegeninde
sıvı suya ait bulgular değerlendirilmiştir. Yüzey jeolojisi ve bulunan minerallerin ortak
göstergesi, Mars’ta yakın jeolojik geçmişte derin okyanuslar yerine yüzeyin her yanına
dağılmış sığ göller olduğudur. Mineraller doğrultusunda bilinen bir canlı türüne çoğunlukla ev
sahipliği yapamayacak nitelikte tuzlu ve asitli suları olan bu göller, gezegenin mevsim
değişimleri ve iklimlerine göre yer yer yağışlara sebep olarak rüzgarla birlikte yüksek
kesimleri de jeolojik olarak şekillendirmiştir. Dünya’ya birçok yönden fazlaca benzeyen Mars
gezegeninin jeolojik geçmişi, bu geçmişi süreci ve şu anki durumunun araştırılması halen
devam etmektedir.
Resim 36: Mars göllerinin temsili bir resmi.
Mühendisliğin tasarım ve uygulama alanındaki başarısının bir sonucu olarak Mars
Keşif Robotları görevi 90 sol’lük öngörülen görev süresinden çok daha uzun sürmüştür. Spirit
normal görev süresinin 24,53 katı kadar süre, 2208 sol(2269 Dünya günü) aktif kalmıştır.
Görevinin 1892. Solünde(26 Ocak 2010) talk pudrası inceliğinde bir kum yığınına saplanan
Spirit, tekerleklerinden birinin arıza yapması sonucu saplandığı yerden kutulamamıştır.
Saplanılan yerin simülasyonu ve bilgisayar yazılımları kullanılarak üretilen kurtarma planları
sorunu çözemeyince, Spirit’in görevine bulunduğu yerde sabit olarak devam etmesine karar
verilmiştir.
Dünya’da olduğu gibi Mars gezegeninde de mevsimler güneş ışınlarının geliş açısını
etkilemektedir. Güneş ışınlarının dar bir açıyla ve daha az miktarda geldiği bölgesel kış
mevsimleri, keşifçiler güneşe doğru bakacak bir yamaç veya yükseltiye çıkarılarak
atlatılmıştır. Spirit saplandığı kumdan kurtulamayıp kış mevsiminde yeterince güneş
alabileceği bir yere gidemediği için, kış mevsiminde kendini sıcak tutabileceği yeterli enerjiyi
alamamış ve 22 Mart 2010 günü de(sol 2210) keşifçiyle iletişim kesilmiştir. Programları
gereği keşifçileri ısınabilmek ve enerji tasarrufu yapabilmek için kendilerini güvenli moda
aldıklarında Dünya ile iletişimi de keserler. Bu sebeple Dünya üzerinde bulunan Deep Space
Network antenleri ve Mars yörüngecileri aracılığıyla keşifçiyle iletişim kurma çalışmaları
devam etmiştir. 1300’den fazla gönderilen sinyale karşılık bölgesel kış mevsimi geçtikten
sonra bile keşifçiden veri alınamadığı için Spirit’in görevi 25 Mayıs 2011 tarihinde resmen
sonlandırılmıştır. Görev sonlanana kadar keşifçinin gezegen üzerinde aldığı yol toplam
7730,50 metredir.
Resim 37: Keşifçi Spirit’in kat ettiği yol.
Spirit’in ters giden görevlerinin aksine Opportunity, 19 Mayıs 2013 tarihi itibariyle
halen Mars üzerinde aktiftir. 16 Mayıs 2013 güncellemesine göre sol 3309 itibariyle keşifçi
Opportunity, 9 yıldan daha uzun süredir gezegen üzerinde çalışmalarına devam etmektedir ve
Mars gezegeni üzerinde 35,76 km yol kat etmiştir. Eagle krateri, Victoria krateri ve Santa
Maria krateri sonrasında keşifçi 6,5 km’lik yolculuğun ardından 9 Ağustos 2011 tarihinde
Endeavour kraterine ulaşmış ve kraterin çeperinde inceleme yapmaya başlamıştır. Endeavour
krateri 22 km çapında ve 300 m derinliğinde olup, Victoria krateriyle jeolojik olarak büyük
benzerlikler göstermektedir. Geçerli güncellemeye göre Endeavour krateri’nin Cape York
bölgesinde bulunan keşifçi, Mars Express ve Mars Reconnaissance Orbiter yörüngecilerinin
sağladığı verileri doğrular nitelikte Jips, Hematit ve Jarosit mineralli bulgular sunmuştur ve
görevine devam etmektedir.
Resim 38: Opportunity’nin Endeavour kraterine kadar kat ettiği yol.
Sonuç olarak;
Mühendislikte tasarım, uygulama, malzeme ve yöntem seçiminin önemini gözler
önüne serer nitelikteki Mars Keşif Robotları programı, insanlığın ve bilimin ufkunu bir adım
öteye taşıyan tarihi çalışmalardan bir tanesidir. Yaklaşık 92,5 günlük öngörülen görev
süresine 9 yıldan daha uzun süre çalışarak cevap veren robotlar, mühendislik çalışmalarında
öngörülen ve test edilen her bir verinin işlenişinin önemini göstermektedir. NASA,
düzenlediği görevlerden elde ettiği veriler doğrultusunda yeni ve daha gelişmiş programlarla
Güneş Sistemi’nde su geçmişi aramayı sürdüreceğini belirtmektedir. Sıkça sorulan ‘‘Nasıl?’’
sorusuna yanıtlar bu projeler sayesinde cevaplanmaya devam edecektir.
KAYNAKLAR
1.
2.
3.
4.
5.
6.
7.
8.
9.
marsrover.nasa.gov/spirit
marsrover.nasa.gov/opportunity
marsrover.nasa.gov/mission/status
marsrover.nasa.gov/mission/spacecraft
NASA Mars Exploration Rovers Launch Fact Sheets
NASA Mars Exploration Rovers EDL Fact Sheets
NASA Mars Exploration Rovers Surface Operations Fact Sheets
http://en.wikipedia.org/wiki/Mars_Exploration_Rover_Mission
Honey Bee Robotics