YILDIZ TEKNİK ÜNİVERSİTESİ
MAKİNE FAKÜLTESİ
MEKATRONİK MÜHENDİSLİĞİ
MÜHENDİS
BÖLÜMÜ
MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ
IŞIĞI TAKİP EDEN KAFA - 2
Proje Raporu
SÜLEYMAN OZAN GÜRSOY - 12067035
16.01.2013
İstanbul
İÇİNDEKİLER
1. ÖZET ................................................................................................................................. 3
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ ................................................. 3
3. SONUÇLAR ve DEĞERLENDİRME........................................................................ 11
4. REFERANSLAR ............................................................................................................ 11
2
1. ÖZET
Bu
projede
breadboard
üzerine
çeşitli
devre
elemanları
kullanılarak
oluşturulan bir düzenek yardımıyla motor miline takılan LDR’lerin ışığın
konumuna göre hareket etmesini sağlamak amaçlanmıştır. Motor milinin
üzerine takılan parçaların kenarlarına 60’ar derecelik açılarla 2 adet LDR
yerleştirilir.Yerleştirilen LDR’lerden ışık aldığı anda motoru döndürüp ışığa
göre konum alması isteniyor.Sistemi bu şekilde kontrol etmek için H Bridge
sistemi kurulur.Devre 9 voltla beslendiğinde motor üzerindeki kafanın ışığa
doğru hareket etmesi sağlanır.
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ
Projemizin çalışma sistemini detaylı bir şekilde anlatmaya başlamadan önce
projemizde kullandığımız devre elemanlarını tanıyalım ve bu projede ne
göreve sahip olduklarını öğrenelim.
Proje Elemanları
1.BREADBOARD: Üzerine projemizin devre elemanlarını yerleştirdiğimiz ve
projemizin lehimlenmeden çalışmasını sağlayan devre tahtasıdır.Devre
tahtası üzerinde birbirine bağlı paralel bağlanmış yapılardan oluşur.İki hat
boyunca uzanan kırmızı ve mavi çizgiler gerilim bağlantılarını sağlar.Kırmızı
artı (+) mavi ise toprak (-) hattıdır.
3
2.ENTEGRE (LM 358): 2 adet OP-AMP içerir.Bunlar devrede gerilim
kazancının
kontrol
kullanılmıştır.Yani
edilmesine
yüksek
yarar.Projemizde
voltajın
karşılaştırıcı
uygulandığı
taraftan
olarak
gerilim
geçer.Motorun milinin sağa ve sola hareketi de bunun göstergesidir.
3.TRANZİSTÖRLER: Çoğunlukla anahtarlama amacıyla kullanılan 3 bacaklı
devre
elemanıdır.Projemizde
BC327
ve
BC337
cinsi
tranzistörleri
kullanmaktayız.3 bacağı bulunur.Soldan sağa doğru C(Collector), B(Base) ve
E(Emitter)
kısımlarından
oluşur.Base
bacağına
voltaj
uyguladığımızda
üzerlerinden akım geçirirler.
4.LDR: Gelen ışığın şiddetine göre dirençleri değişen devre elemanıdır.Işığın
şiddeti ile direnç ters orantılıdır.Aydınlıkta az karanlıkta yüksek direnç
gösterirler.Projede ayrıca iki LDR nin gerilim bölücü görevi vardır.
5.DC MOTOR:
Elektrik enerjisini hareket enerjisine dönüştüren ve güç
kaynağından gelen akımın yönüne göre dönen devre elemanıdır.Projemizde 3
voltluk bir DC motoru kullanmaktayız.
4
6.DİYOTLAR: Tek yöne akım ileten devre elemanıdır.Üzerine bakarak + ve –
kutupları tayin edebiliriz.Projede 4 adet 4001 adlı diyot kullandık ve akımın
tek yönde ilerlemesini sağladık.
7.KONDANSATÖRLER:
Yük
depolamak
için
kullanılan
devre
elemanıdır.Sistemizde biri kutuplu biri kutupsuz olmak üzere 2 adet
kondansatör kullandık.
8.DİRENÇLER:
tutar.Devrede
Direnç devrede akımı kısıtlar ve belli bir değerde
potansiyometre
ile
birlikte
gerilim
bölücü
olarak
kullanılırlar.Dirençler üzerinde çeşitli renkler vardır ve bu renklere göre
okunurlar.
5
9.POTANSİYOMETRE: Devrelerde değişken direnç ve gerilim elde etmek için
kullanılır.Projemizde
ayarlı
direnç
haline
getirilmek
için
iki
ayağı
kullanılır.Böylece kafanın istenilen şekilde ışığı takip etmesi kolaylaşır.
ÇALIŞMA ŞEKLİ
Güç kaynağından 9 voltluk gerilim çıkar ve devreyi çalıştırır.Trimpot
ile motorun dönme hızını ayarlarız.Tranzistör ve diyotları devrede gösterilen
şekilde taktığımızda devre çalışmaya başlamaktadır.Burada entegrenin
görevi ise LDR nin ışığa doğru hareket etmesini sağlamaktır.Entegrenin 3 ve
6 nolu uçlarını birleştirmemizden de anlaşılıyor ki entegre gerilim bölücü
olarak kullanılmıştır.Tranzistörler ve diyotlar yön kontrolünü sağlar.Ayrıca
dirençler
ve
trimpot
arasındaki
kısım
da
gerilim
bölücü
olarak
kullanılmıştır.H-bridge köprüsü doğru kurulduktan sonra sistem istenilen
şekilde hareket etmeye başlar.H Bridge nin sistemdeki görevi akım yönünü
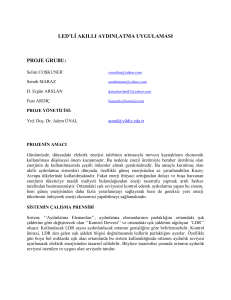
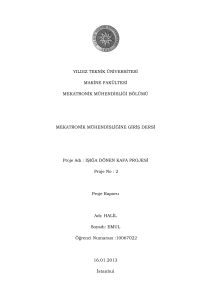
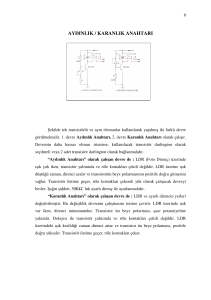
ayarlamaktır.Devrenin
elemanları,
kurulumu
6
aşağıdaki
fotoğraflarda
gösterilmektedir.
7
8
9
10
3. SONUÇLAR ve DEĞERLENDİRME
Başarı durumuna bakmak gerekirse, projemde hedeflediğim sonuca
ulaştım ve başarıyla çalıştırdım.Fakat projemde LDR lerin telleri zil teli
olmasına rağmen motorun dönmesini engellediğinden motorun üzerine,
motorun hangi tarafa döndüğünü belli eden bir sistem yerleştirdim.Sonuç
olarak mantık değişmemiş oldu.LDR lere ışık tutunca LDR ler ışığa
yönelmedi de motorun milinin dönüş yönünü değiştirdi.
Bu projede devre kullandığım devre elemanlarını ayrıntılı bir şekilde
öğrendim.Devre gördüğümde ne yapmam gerektiğini öğrendim ve bu bende
özgüven oluşturdu.Lehim yapma konusunda ustalaştım.Devre yapımında
ihtiyacım olan örneğin avometre,entegre gibi aletlerin kullanımını öğrendim.
Projemi başka türlü yapabilseydim öncelikle breadboardaki görüntü
kirliliğine sebep olan tellerden kurtulmak isterdim.Bunun içinde bread
boardın etrafına dikdörtgenler prizması şeklinde bir
parça ekler ve
görünümünü daha da güzelleştirirdim.Bu sistemden otomatik bir kumsal
şemsiyesi yapmak isterdim.Güneş’i görünce ona doğru dönerek altında gölge
bırakan bir sistem tasarlamak isterdim.
1. REFERANSLAR
Yararlanılan kaynakların listesi. Formatı:
Newton C. Braga, Robotik Mekatronik ve Yapay Zeka, 2005
Güçlü Tuğay, Elektronik Hobi, Alfa Yayınları, 2011
http://arduinoturkiye.com/devre-tahtasi-breadboard-kullanimi/
12
Ocak
2013
http://endtas.com/robot/modules.php?name=Content&pa=showpage&pid=
39 12 Ocak 2013
11
http://www.diyot.net/op-amp.htm 12 Ocak 2013
http://www.google.com.tr/imgres?q=op+amp+lm358&hl=tr&tbo=d&biw=128
0&bih=909&tbm=isch&tbnid=YmMts19v8AbhuM:&imgrefurl=https://www.s
parkfun.com/products/9456&docid=jU0zQSuZo483GM&imgurl=https://dln
mh9ip6v2uc.cloudfront.net/images/products/9/4/5/6/0945601.jpg&w=600&h=600&ei=ezzzUKKqD86YhQe8xoCgDg&zoom=1&iact=hc&v
px=168&vpy=113&dur=3144&hovh=225&hovw=225&tx=142&ty=122&sig=1
02242088661900672650&page=1&tbnh=142&tbnw=141&start=0&ndsp=31
&ved=1t:429,r:1,s:0,i:79 12 Ocak 2013
http://www.galigear.com.au/BC337-NPN-Transistors-for-sale 13 Ocak 2013
http://www.devreyapimi.com/tag/ldr-nedir/ 14 Ocak 2013
http://www.robotiksistem.com/dc_motor_ozellikleri.html 15 Ocak 2013
http://www.robotiksistem.com/diyot_nedir_diyot_polarlama.html 15 Ocak
2013
http://www.elektrikport.com/teknik-kutuphane/potansiyometrenin-icyaps/4260#ad-image-0 15 Ocak 2013
12
http://www.yasiy.com/s/h-bridge-hakkinda-bilgi 15 Ocak 2013
13