YILDIZ TEKNİK ÜNİVERSİTESİ
MAKİNE FAKÜLTESİ
MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ
Işığa Dönen Kafa Projesi – 2
Proje Raporu
Nurulllah Anıl Afacan-11068011
16.01.2013
İstanbul
İÇİNDEKİLER
1. ÖZET ..................................................................................................... 3
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ...................................... 3
3. SONUÇLAR ve DEĞERLENDİRME ......................................................... 8
4. REFERANSLAR ...................................................................................... 8
2
1. ÖZET
Işığa dönen kafa projesinde verilen bilgiler kullanılarak ve çeşitli bilgileri
araştırıp, öğrendikten sonra onları yorumlayarak projeme aktardım.
Kullanılacak malzemelerin herbirinin işlevini, devreye nasıl bağlandığını,
devredeki amacını, diğer yapılarla olan ilişkisinin ne olduğunu detaylı olarak
öğrendi. Ayrıca bu aksamların datasheetlerini inceleyerek tam olarak
mantığını kavramaya çalıştım.
Projede gerekli elektronik aksamlar kullanarak, üzerinde duyucular
bulunan bir kafanın, bu duyucuları kullanarak, motor yardımıyla dönerek
ışığı takip etmesini sağlandım. Sonuç olarak kafanın yaklaşık 90 derecelik
bir aralıkta hareket aralığında ışığı takip etmesini sağladım.
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ
Yapıyı iki kısımda inceleyelim;
1)Kafa
Kafa kısmında kullanılan malzemeler:
3 Volt Motor
2 Adet LDR
Yukarda bahsettiğim üzere ışığı takip etmek için çeşitli duyuculara
gereksenimimiz vardı. Burda duyucu olarak 2 adet LDR kullandım.
Duyucuların hareketi ise 3 voltluk Dc motor ile sağladm. LDR’leri sert bir
mukavvaya bağladıktan sonra bu mukavva ile motoru yapıştırdım. LDR’lerin
çalışma prensibinden kısaca bahsedecek bahsedecek olursak;
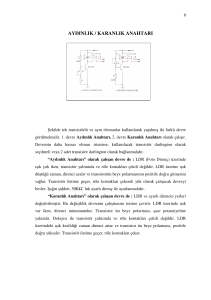
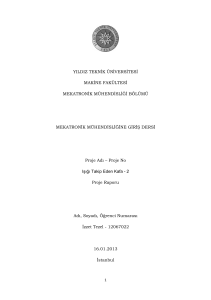
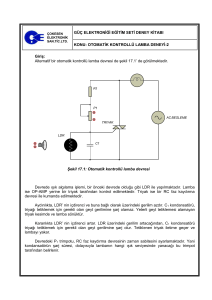
LDR’ler diğer adıyla foto-dirençler ışığa göre
devrenin direncini değiştirirler. Pasif haldeyken yani
üzerine ışık düşmediğinde direnci 1 milyon ohm’a kadar
çıkarken, üzerine ışık düştüğünde bu değer birkaç kohm’a kadar düşer. Bu durumda direnç azaldığından
gerilimi de yükselir. Kısacası üzerine ne kadar kuvvetli
3
ışık düşerse gerilimi o kadar yükselir ve üzerinden akım geçer.
Yanda LDR’nin direnç ışık değişim
karakteristiği verilmiştir.
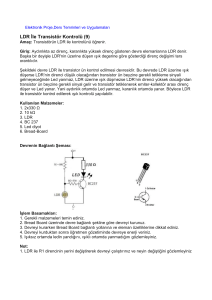
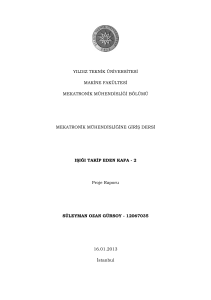
LDR’nin gövde kısmında kullanacağımız
transistörle olan ilişkisinden bahsedersek. Bu
devrede LDR üzerine ışık düşerse LDR’nin
direnci
beyzine
düşük
(yandanki resimde “B” ile
olacağından
gösterilen)
transistor’ün
gövdede kullnacağımız
entgreden(LM358) gerekli tetikleme sinyali gelmeyeceğinden akım geçmez.
Burada transistör anahtar işlevi görmüş olur.Eğer LDR üzerine ışık
düşmezse
LDR’nin
direnci
yüksek
olacağından
transistor’ün
beyzine
entegreden gerekli sinyal gelir ve transistör tetiklenir akım geçer ve motor
hareket eder. Bu sayede kafa hareket ederek ışığa yönlenmiş olur.
2)Gövde
Gövde Kısmında kullanılan malzemeler:
2 Adet BC337 Transistör (Q4 ve Q3)
2 Adet BC327 Transistör (Q1 ve Q2)
15k ve 22k Dirençler
100n ve 100 µf-16 Volt Kondansatör
LM358 entegre
4 adet 4001 diyot
4
Gövde kısmını açılamaya H-köprüsü (H-bridge)
ile başlayalım. Gövdenin H-köpüsü bölümünde 2
çeşit transistör, 4 adet diyot ve motor kullandık.
Şimdi diyot ve transistörün ne işe yaradığını neden devreye bu şekilde
bağlandığını ve neden iki çeşit transistör kullandığımızı inceleyelim.
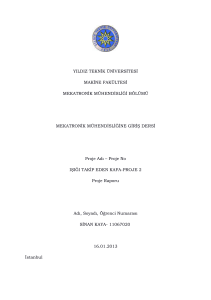
Transistörler yükselteç olarak görev yaparlar.
Devrede gerilim ve akım kazancı sağlarlar. Aynı
zamanda devrede anahtar işlevi görürler. NPN ya
da
PNP
şeklinde
dizilmiş
üç
yarı
iletkenin
birleşiminden oluşur. Ayakları, beyz (B), kolektör
(C), emiter (E)'dir.
Diyot ise tek yönde akım geçiren devre elamanıdır. Her zaman bir ucu
anot diğer ucu katottur.
Kullandığımız
transistörlerinden
BC337
NPN,
BC327 ise PNP özelliklidir. Devrede LDR lerin ışığa göre
hareket edebilmesi için ters kutuplu iki adet transistör
kullandık.
BC337 ye akım geldiğinde kolektör ve emiterden
gelen akım beyze ilerler. BC327 de ise tam dersi bir akım
oluşur. Böylece motorun hareketi sağlanır. Motorun
dönüş yönü de buna bağlıdır. Akım nasıl geçiyorsa
motorda akımın geçtiği yöne doğru döner.
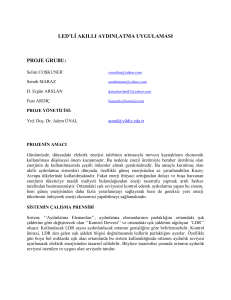
Şimdi devrede kullandığımız LM358 entegreyi inceleyelim;
5
Bu entegrenin içinde A ve B kısmı olmak üzere iki adet OP-AMP
(işlemsel kuvvetlendirici) bulunur. Tek kaynakla beslenebilir. Devredeki
amacı karşılaştırma yapmaktır. Bu devrede LM358’deki op-amp’a giriş,
1.giriş yani LDR’lerden diğeri ise dirençlerden yani 2.girişten oluşan iki ayrı
gerilim bölücü ile yapılmaktadır.
LM358 in 1. Ve 7. Ayakları output olarak görev yapar. Bunlar
transistörlerin beyz ayaklarına bağlanır. Işığın geldiği yöne göre entegrenin 1.
ve ya 7. ayağından gelen (+) yüklü akım transistöre Beyz kutubundan giriş
yapmaktadır
ve
bu
bacaktan
giren
akım
transistörün
çalışmasını
sağlamaktadır. Motorun dönmesini saplayan akım pilden gelmektedir.
4.ayak topraklanır. 8. Ayak ise devreye seri olarak bağlanır. Aşağıda
görüldüğü gibi 2 ve 5 numaralı bacaklar birbirine bağlanmıştır.
6
Potansiyometrenin
ise
fiziksel
müdahalelerle
ayaralanabilen bir çeşit dirençtir. Potansiyometreler
devrelerde akımı sınırlamak ya da devrede direnç
değişimi
yaparak
gerilimi
bölmek
amacıyla
kullanılırlar. 3 bacaklıdırlar. Devrede 15k ve 22k lık
devrelere bağlanarak gerilimi böler.
Görüldüğü gibi bir bacağı 22k lık dirence, bir
bacağı
15k
lık
topraklanmıştır.
dirence,
diğer
Potansiyometre
bu
bacağı
iki
ise
direnç
arasında gerilimi böler.
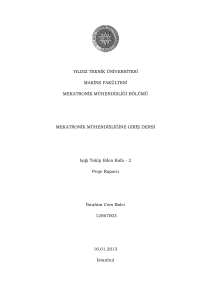
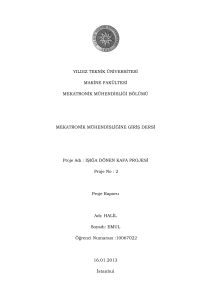
Işık tutulduktan sonra gözlemlenenleri sırayla açıklayacak olursak;
Pilden çıkan akım, kondansatörlerde depoladıktan sonra 3 bölüme
ayrılır. Bir kısmı entegreye gider ve entegreyi çalıştırır. İkinci kısmı
potansiyometre R1 ve R2’nin bulunduğu yola gider. Son kısmı ise LDR’lerin
olduğu yola sapar.
7
LDR’lere ışık tutulduğundai direnç azalır ve üzerinden akım geçmeye
başlar. Ve akım 2. Ve 5. Ayakların bulunduğu noktaya gelerek pencere
karşılaştırıcısına girer. Akım OP-AMP’lar tarafından 3. ve 6. ayaklara göre
karşılaştırılırken yine OPAMP’lar tarafından yükseltilerek entegrenin 1. ve
ya 7.ayağına yönlendirilerek entegreden gönderilmektedir. Akım 7. ayaktan
çıkar, bu akım Q2 ve Q4 transistörlerinin beyz ayaklarına ulaşarak
transistörleri çalıştırmaktadır. Q4, kollektörüne pilden gelen akımı ve Beyze
entegreden gelen akımı birleştirerek emitere yönlendirmektedir. Emiterden
çıkan
ve diyotlarla motora yönlendirilen akım motorun dönmesini 10
sağlamaktadır. Motordan çıkan akım Q1’in emiterinden girip kollektöründen
çıkarak toprağa gitmektedir. Böylece devre tamamlanmış olur.
Yukarıda devrenin Solid works ‘deki çizimi yer almaktadır.
8
3. SONUÇLAR ve DEĞERLENDİRME
Birçok elektronik aksamın kullanıldığı bu proje elektronik bilgimin
gelişmesi için bana büyük bir heves getirdi. Board kullanımını öğrenmek
elketronik aksamlarla uğraşmak, heyecan vericiydi.
Projenin daha yazılımsal unsurlar içermesini. PIC’in kullanılacağı ve
programlanabileceği bir projeyle uğraşmak isterdim
REFERANSLAR
Güçlü Tuğay, Elektronik Hobi, Alfa Yayınları, İstanbul, 2004
Transistörler
http://www.yapalim.net/elektrik-ve-elektronik-dersleri/elektronikdevre-elemanlar%C4%B1-ve-g%C3%B6revleri/transist%C3%B6r/
http://www.devreyapimi.com/tag/ldr-nedir/
http://www.robotiksistem.com/dc_motor_ozellikleri.html
9