F. Ü. Fen ve Mühendislik Bilimleri Dergisi, 17 (1), 10-18, 2005
Klasik Yol Verme Metotlarının Denetleyici Yardımıyla
Gerçekleştirilmesi
İlhami ÇOLAK
Ramazan BAYINDIR
icolak@gazi.edu.tr
bayindir@gazi.edu.tr
Gazi Üniversitesi, Teknik Eğitim Fakültesi, Elektrik Eğitimi Bölümü, 06500 Beşevler, Ankara
Özet
Bu çalışmada üç fazlı asenkron motorlarda kullanılan klasik yolverme yöntemleri PIC 16F84
denetleyicisi ile gerçekleştirilmiştir. Yıldız-üçgen, seri direnç ve rotoru sargılı asenkron motora yol verme
yöntemlerinde kullanılan kontaktör, zaman rölesi ve kontak sistemi yerine, anahtarlama elemanı olarak
triyak kullanılmıştır. Anahtarlama elemanlarının tetikleme sinyalleri denetleyicinin sayısal çıkışları
kullanılarak elde edilmiştir. Yapılan uygulama ile hassas, bakım gerektirmeyen ve elektromekanik
elemanlardan arındırılmış bir yol verme sistemi geliştirilmiştir.
Anahtar Kelimeler: Asenkron motor, Yol verme, PIC 16F84 denetleyici
Implementation of the Classical Starting Techniques Using
Microcontroller
Abstract
In this study, classical starting methods used in three phase induction motors have been
implemented using PIC 16F84 microcontroller. Triacs have been used as switching components apart
from the contactors, time relays and contacs used in the delta/wye, serial resistance and wounded rotor
induction motor starting methods. The gate signals of the switching components have been generated by
using PIC microcontrtoller. With this application, a sensitive, reliable and a simple structured starting
system has been developed.
Keywords: Induction motor, Starting, PIC 16F84 microcontroller
1. Giriş
Asenkron motorlar üç fazlı sistemden beslenir ve sargıları 220 V veya 380 V
değerindeki gerilime göre sarılırlar. Özel durumlarda sargılara uygulanacak gerilim farklı
değerlerde olabilir. Sargılara uygulanan bu gerilim, sargı empedanslarının küçük olması
nedeniyle kalkınma anında çok fazla akım çekilmesine neden olur. Motor ilk kalkınma anında
rotor dönmediği için sekonderi kısa devre edilmiş bir trafo gibi çalışır. Dolayısıyla rotor
devresinden ve buna bağlı olarak stator devresinden kalkınma anında yaklaşık olarak tam yük
akımının 4-8 katı kadar bir akım çekilir. Kalkınma torkları ise tam yük torkunun 2-3.5 katı
kadardır. Bundan dolayı asenkron motorlar genellikle boşta çalıştırılıp, anma hız değerlerine
ulaşıldıktan sonra yüklenirler. Asenkron motorların kalkınma anında fazla akım çekmesi
kumanda devresinde kullanılacak elemanlar ve iletkenlerin maliyetini artıracağından, bazı
yöntemler yardımıyla kalkınma akımı belirli değerlerde tutulur. Bu yöntemlerin ana prensibi,
stator sargılarına düşük gerilim uygulamaktır. Bilhassa büyük güçlü asenkron motorlara direkt
olarak yol verildiklerinde ilk kalkınmada çekecekleri büyük kalkınma akımları enerji iletim
Klasik Yol Verme Metotlarının Denetleyici Yardımıyla Gerçekleştirilmesi
hatlarında düşen gerilimin artmasına sebep olur. Dolayısıyla bu hattan beslenen alıcılar
uçlarındaki gerilimin düşük olmasından etkilenir. Yol verme yöntemlerinin tamamında, motora
yol verebilmek için zaman rölesi ve kontaktörden oluşan bir kumanda devresi kurulur. Motor
ise kontaktörün kontakları kullanılarak oluşturulan güç devresine bağlanır [1, 2].
Bu tip yol verme yöntemlerinde kumanda devresinde anahtar olarak kontaktör
kullanılır. Kontaktör kontakları aşındığı için belirli zaman sonra mekaniki arızalar meydana
gelebilmektedir. Kontak noktaları tamamıyla aşınmış ise kontaklar değiştirilmelidir.
Kontaktörlerin manyetik nüvelerinde zamanla toz birikmesi sonucu gürültülü çalışabilir. Bu
nedenlerden dolayı bu tip sistemler sürekli bakım gerektirir. Kullanılan kontaktör ve zaman
rölesi ve yol verme dirençlerinden dolayı güç kaybı da oldukça fazladır [3].
PIC serisi denetleyiciler Microchip firması tarafından geliştirilmiş ve üretim amacı çok
fonksiyonlu lojik uygulamalarının hızlı ve ucuz bir denetleyici ile yazılım yoluyla
karşılanmasını sağlamaktadır [4, 5]. Ayrıca sayısal olarak akım, gerilim, güç katsayısı ölçme
işlemi ve reaktif güç kompanzasyonu uygulamaları da denetleyici tabanlı olarak
gerçekleştirilmektedir [6, 7]. Gerçekleştirilen sistemde kontaktör ve zaman rölesi
kullanılmamıştır. Kontaktör yerine anahtar olarak yarıiletken elemanlar kullanılmıştır. Yazılan
program ile de, gerekli gecikmeler elde edilerek, zaman rölesi ihtiyacı karşılanmıştır. Bütün
endüstri dallarında temel amaç, otomasyonu sağlayarak üretimi artırmak ve maliyeti
düşürmektir. Yapılan bu çalışmanın kuruluş maliyeti kontaktörlü sistemlere göre pahalı
olmasına karşılık, işletme maliyeti düşüktür. Uygulama ile buna benzer motor kontrol
uygulamalarının daha basit ve güvenilir şekilde denetleyici ile yapılabileceği gösterilmiştir.
Yapılan çalışma ile endüstriyel uygulamalarda yol vermede kullanılan yol verme
metotları üç fazlı bir alternatif akım motoru ile PIC 16F84 denetleyici kullanılarak
gerçekleştirilmiştir
2. Klasik Yol Verme Metotları
Asenkron motorların kalkınma anında fazla akım çekmesi kumanda devresinde
kullanılacak elemanlar ve iletkenlerin maliyetini artıracağından, bazı yöntemler yardımıyla
kalkınma akımı belirli değerlerde tutulur. Bu yöntemlerin ana prensibi, stator sargılarına düşük
gerilim uygulamaktır. Bu maksatla aşağıdaki metotlar kullanılır:
1. Yıldız-üçgen yol verme.
2. Stator sargılarına seri direnç veya reaktans bağlayarak yol verme.
3. Rotoru sargılı asenkron motorlarda, rotor sargılarına harici dirençler bağlanarak yol
verilir.
Sincap kafesli asenkron motorlarda ise rotor yapıları uygun şekilde imal edilerek kalkınma
anında rotor etkin direncinin büyük olması sağlanır.
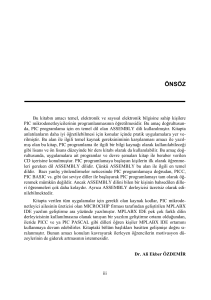
2.1 Yıldız-üçgen yol verme: Yıldız-üçgen yol verilen motorlarda, motorun stator sargıları üçgen
bağlantıdaki maruz kalacağı gerilim değerinin etkisinden ve aşırı akım ve güç çekmesinden ilk
kalkınma anında kurtulmaktadır. Şekil 1.a’da bir asenkron motora yıldız-üçgen yol verme güç
11
İ. Çolak ve R. Bayındır
devresi verilmiştir. Bu devrede, motor önce yıldız, sonra da üçgen çalışmaya geçer. Yıldız
çalışmada M ve Y kontaktörleri, üçgen çalışmada ise M ve ∆ kontaktörleri kapalı durumdadır.
Yıldız-üçgen bağlantıyı gerçekleştirecek kumanda devresi burada gösterilmemiştir. Ancak
kumanda devresinin tasarlanmasında, yıldız kontaktörü çalışırken üçgen kontaktörü
çalışmamaktadır. Üçgen kontaktörü çalışırken de yıldız kontaktörü çalışmamaktadır. Yani,
yıldız ve üçgen kontaktörlerinin normalde kapalı kontakları birbirlerinin bobin sargılarına seri
bağlanarak elektriksel kilitleme gerçekleştirilir. Şekil 1.b’de ise yıldız üçgen yol verme
denetleyici yardımı ile yapılmıştır.
R S T
R S T
∆
M
Υ
Asenkron motor
Asenkron motor
(a)
(b)
Şekil 1. Asenkron motorun yıldız-üçgen yol verilmesine ait güç devresi
Anahtarlama elemanı olarak triyak kullanılmıştır. Böylece yol verme sistemi elektro
mekanik elemanlardan arındırılarak sistem mekaniki arıza, gürültü, bakım ve kullanılan
elektromekanik elemanlardan arındırılmıştır. Triyakların geyt sinyalleri denetleyici tarafından
sağlanmaktadır. Geyt sinyalleri ile ayrıntılı bilgi Tablo.1’de özetlenmiştir. Hangi durumda
denetleyicinin hangi pininin set olduğu bu tablodan görülebilmektedir.
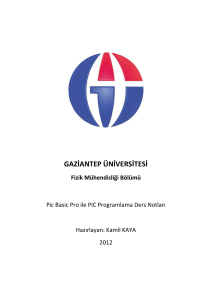
2.2 Stator sargılarına seri direnç veya reaktans bağlayarak yol verme: Stator sargılarının
kalkınma anında yüksek gerilime maruz kalmasını önlemek için, ayarlı veya kademeli ön
dirençler kullanılır. Kullanılacak olan dirençler sadece gerilim bölücü görevi görürler. Ayarlı
olanlar reosta veya statik direnç (yarıiletken kontrollü direnç) olabilir. Kademeli olanlarda ise,
kademe sayısı istenilen sayıda olabilmektedir. Her bir kademedeki direnç değerleri bir kontaktör
gurubu veya anahtar gurubu tarafından kısa devre edilerek devre dışı bırakılırlar. Ön direnç
kullanılarak yapılan yol verme metodunun en önemli dezavantajı, dirençler üzerinden geçen
akım nedeniyle ısı şeklinde güç kaybı meydana gelmesidir. Motor önce R1 direnci devrede iken,
üçgen olarak yol almaya başlar. Motor hızlandıkça, belirli bir zaman sonra R1 direnci M1
kontakları ile kısa devre edilir. Daha sonra motor üçgen çalışmasını sürdürür. Böylece motorun
düşük gerilim ve akımla kalkınması sağlanmış olur. Asenkron motora ön dirençle yol
verilmesine ilişkin güç devresi Şekil 2.a’da verilmiştir. Şekil 2.b’de ise ön dirençle yol verme
işlemi denetleyici yardımı ile yapılmıştır. Anahtarlama elemanı olarak triyak kullanılmıştır.
12
Klasik Yol Verme Metotlarının Denetleyici Yardımıyla Gerçekleştirilmesi
Sistem elektromekanik elamanlardan arındırılmıştır. Sinyaller Tablo.1’de verildiği sıraya göre
uygulanmaktadır.
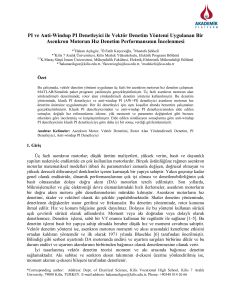
2.3 Rotoru sargılı asenkron motorun rotor sargılarına harici direnç bağlayarak yol verme:
Şekil 3.a’da rotoru sargılı bir asenkron motorun rotor sargı dirençlerinin artırılarak yol
verilmesine ilişkin güç devresi verilmektedir. Burada rotor devresine seri olarak direnç
bağlanmıştır. Motor yıldız olarak yol almaya başladığında, yol aldıkça R1 direnç gurubu M1
kontakları tarafından kısa devre edilir.
Rotoru sargılı asenkron motorun rotor sargı uçları altı adet olarak bağlantı kutusuna
çıkartılmış ise, rotor devresi yıldız veya üçgen bağlanabilir. Fakat çoğunlukla yıldız bağlantı
yapılarak, üç adet rotor sargı uçları ve nötr ucu bağlantı kutusuna çıkartılır.
Rotoru sargılı asenkron motorların kalkınma anında aşırı akım çekmesinin nedeni; hız
sıfır iken rotorda endüklenen gerilimin yüksek olması ve bu gerilim değerinin çok küçük bir
rotor empedansı üzerinden kısa devre edilmesidir. Rotor devresine bağlanacak dış dirençler
yardımıyla rotorun toplam empedansı artırılacağından, rotor devresinden geçen akım azalacak
ve rotor geriliminin kısa devre olması ortadan kalkacaktır Harici direnç değeri arttıkça motorun
ürettiği kalkınma torku artmakta, ancak anma hızında çalışırken kayması da artmaktadır. İşte
bundan dolayı motorun kalkınma anında rotor direnci büyük, anma hızında çalışırken rotor
direnci küçük yapılarak kayma en aza indirilir. Rotor devresine çok büyük değerli bir direnç
bağlanırsa veya rotor sargı uçları açık devre yapılırsa motorun kalkınması mümkün olmayabilir.
Çünkü açık devre yapılan rotor devresinden akım geçmez. Rotor akımının sıfır olması
durumunda ise motor tork üretmez. Dolayısıyla, rotor devresine bağlanacak harici direnç
motoru kalkındıracak kadar tork üretebilen bir değerde olmalıdır [8]. Şekil 3.b’de ise rotoru
sargılı asenkron motorun rotor sargılarına harici direnç bağlayarak yol verme işlemi denetleyici
yardımı ile yapılmıştır. Anahtarlama elemanı olarak triyak kullanılmıştır. Triyakların geyt
sinyalleri Tablo 1’de verilen sıra ile anahtarlanmaktadır. Tabloda kullanılan RB0-RB7 PIC’in B
portuna ait pinlerdir.
Tablo.1 PIC 16F84’e ait pinlerin set edilmesi
Yol verme
çeşidi
Yıldız
Üçgen
Ön
dirençle
Rotoru
sargılı
PIC 16F84’ün yol verme çeşidine göre pinlerin set edilmesi
R S T uçları
Yıldız noktası oluşturulması
Üçgen Bağlantı yapılması
RB0
X
X
RB1
RB2
X
X
X
X
R S T uçları
RB3
X
RB6
RB0
X
X
RB1
RB2
X
X
X
X
R S T uçları
RB0
X
X
RB1
X
X
RB2
X
X
RB4
X
RB5
X
Dirençlerin kısa devre edilmesi
RB3
RB4
RB5
X
X
X
Dirençlerin kısa devre edilmesi
RB3
RB4
RB5
X
X
X
13
RB7
RA2
X
X
X
Üçgen bağlantı yapılması
RB6
RB7
RA2
X
X
X
X
X
X
Üçgen bağlantı yapılması
RB6
X
X
RB7
X
X
RA2
X
X
İ. Çolak ve R. Bayındır
R
R1
T
S
M1
M1
R1
R
M1
R1
T
S
R1
R1
R1
∆
M
Asenkron motor
Asenkron motor
(a)
(b)
Şekil 2. Asenkron motora ön dirençlerle yol verilmesine ait güç devresi
R S T
R S T
∆
M
Rotoru Sargılı
Asenkron motor
R1
M1
Rotoru Sargılı
Asenkron motor
R1
M1
R1
M1
R1
R1
R1
(b)
(a)
Şekil 3. Rotoru sargılı asenkron motorun rotor devresine direnç bağlanarak yol verilmesine ait
güç devresi
14
Klasik Yol Verme Metotlarının Denetleyici Yardımıyla Gerçekleştirilmesi
4. Uygulama Çalışmaları
PIC 16F84 ile yapılan çalışmaya ait blok diyagram Şekil 4’de verilmiştir. Sistem 4 ana
bölümden oluşmuştur.
Denetleyici
Giriş/Çıkış
Sürücü Devre
Üç fazlı
Asenkron Motor
Şekil 4. PIC 16F84 ile yapılan çalışmaya ait blok diyagram
Denetleyicinin çıkışından alınan dijital sinyaller opto izolatörleri iletime geçirmektedir.
Böylece diyak iletime geçmekte diyaklar ise triyakları iletime geçirmektedir. Burada triyaklar
anahtar görevi yaparak iletime geçirildiğinde motoru çalıştırmakta, kesime geçirildiğinde ise
motoru durdurmaktadır.
Şekil 5’de asenkron motora yıldız-üçgen yol verilmesine ait akış diyagramı verilmiştir.
Ön dirençlerle ve rotoru sargılı asenkron motorun rotor devresine direnç bağlanarak yol verme
devresi akış diyagramı yıldız üçgen yol verme ile aynıdır. Sadece çıkış portundaki bitlerin
yönlendirilmesi farklıdır. Bu nedenle portların yönlendirilmesi Tablo.1’de verilmiştir. Program
assembler dilinde hazırlanmıştır. Elde edilen program makine diline çevrildikten sonra hex
dosyası programlama cihazı yardımıyla PIC’e kopyalanmıştır. Akış diyagramında verilen
gecikmeler dikkate alınarak gerekli çıkışlar enerjilendirilmiştir. Gecikme için ayrıca bir alt
program yazılmıştır. Bu programın akış şeması Şekil.6’da verilmiştir.
Yapılan sistemin önemli özelliklerinden biri bu alt programı kullanarak bir zaman
rölesine ihtiyaç duymamasıdır. Zaman gecikmeleri yazılımla gerçekleştirilmiştir. Böylece çok
hassas zaman gecikmeleri yapmak mümkün olmuştur. Bir komutun icra süresi osilatör
frekansının 4’e bölünmesi ile bulunur. Çalışmada osilatör olarak 4 MHz’lik kristal osilatör
kullanıldığı için bir komutun icra süresinin frekansı (dahili frekans) 1 MHz’dir. Bu frekansın bir
saykılı, yani bir komutun icra süresi 1 µs ’dir. Zaman gecikmesini artırabilmek için iç içe iki
döngü oluşturulmuştur. Bir döngüde maksimum gecikmeyi sağlamak için SAY2 ve SAY3’ün
içine h’FF’ yazılmıştır. İç içe döngüde elde edilen gecikme 200 ms’dir. Bu değer SAY1
içeriğine yazılan D’05’ değeri ile 5 defa döndürülerek geciktirme alt programının bir defa
çağrılmasında toplam bir saniyelik gecikme elde edilmiştir. Gecikme süresi SAY1 içeriği
değiştirilerek artırılıp azaltılabilir.
Şekil 7’de PIC 16F84’ün çalıştırılabilmesi için temel konfigürasyon ve yapılan çalışma
görülebilmektedir. Devrede PORT A’nın RA0 ve RA1 pinleri giriş olarak kullanılmıştır. RA0
pini başlatma, RA1 pini durdurma işlemi yapmaktadır. RA2 pini çıkış olarak kullanılmıştır.
PORTB’nin çıkışlarının tamamı çıkış olarak kullanılmıştır [9, 10].
15
İ. Çolak ve R. Bayındır
GECİKME
BAŞLA
SAY1 D'05' yükle
PIC 16F84'ü tanıt
PIC 16F84'ün
giriş/çıkış hazırla
SAY2 h 'FF'
yükle
Port A'nın 0.biti
0 mı?
H
SAY3 h 'FF'
yükle
E
PORTB'ye b'00011111' yükle
PORTA'ya b'0010' yükle
SAY3=0 mı?
CALL GECIKME
Hayır
SAY3=SAY3-1
GECIKME
Evet
PORTB'ye b'11100111' yükle
Port A'nın 1.biti
0 mı?
SAY2=0 mı?
Evet
Hayır
SAY2=SAY2-1
Evet
H
Hayır
E
SAY1= 0 mı ?
Evet
PORTB'ye h'00' yükle
PORTA'ya h'00' yükle
SAY1=SAY1-1
Evet
RETURN
Şekil 5. Asenkron motora yıldız-üçgen yol
verilmesine ait akış diyagramı
Şekil 6. Zaman geciktirme alt programı
PIC çıkış gerilimi 5 volttur. Çıkış devre elemanlarının çalışma gerilimi ise 220 volttur.
Bu devreden elde edilen dijital sinyaller opto izolatörü iletime geçirmektedir. Opto izolatör hem
PIC çıkış ile sürücü girişini yalıtmakta hem de PIC çıkışının yüklenmesini önlemektedir. Şekil
8’de opto izolatör ve triyağın bağlantısı verilmiştir. Opto izolatör iletime geçtiğinde içerisindeki
diyak iletime geçirmektedir. Böylece triyaklar iletime geçmektedir. Burada triyaklar anahtar
görevi yapmaktadır. Triyak alternatif akımda çalışan tam dalga yük kontrolü yapabilen
elektronik akım anahtarıdır. AC akımda her iki yönde de akım geçirir. Akım geçirebilmesi için
yeterli A1 ve A2 akım taşıyıcı polarmaları yanında geyt polarması olarak AC, DC veya kısa
süreli değişik dalga şekilli gerilim uygulanmalıdır. Her alternans bitiminde gerilimin sıfır
olduğu anada triyak yalıtkan olur ve geyt kontrolü eline geçirir. İkinci alternans bitimine kadar
triyakın iletken olması sağlanır. Triyakın sürekli olarak iletimde kalması yani yük akımım
sürekli geçirmesi isteniyorsa triyak her alternans başında bir kez tetiklenmelidir. Çalışmada bu
işlem opto izolatör içerisindeki diyak ile sağlanmıştır.
16
Klasik Yol Verme Metotlarının Denetleyici Yardımıyla Gerçekleştirilmesi
RA2
RA1
RA3
RA0
RA4
OSC1
100 MCLR
OSC2
10k
PIC 16F84
Vss
Kurma
RB0
RB1
GND
10 k
10 k
Vcc (+5V)
Başlatma
Vdd
22 pf
RB7
RB5
RB3
RB4
22 pf
GND
RB6
RB2
Durdurma
Vcc (+5V)
0.1µF
⎫
⎪
⎪⎪
⎬ Optoizolatör
⎪
⎪
⎪⎭
Şekil 7. PIC 16F84’ün konfigürasyonu
Şebeke
A2
BTA 41-600B
MOC 3051
270
1
4
2
5
3
6
G
A1
PIC çıkışı
10k
Motor sargıları
Şekil 8. PIC denetimli bir faz sürme devresi
5. Sonuç
Bu çalışma üretim amacı çok fonksiyonlu lojik uygulamaların hızlı ve ucuz bir şekilde
yapılması olan PIC 16F84 denetleyicisi ile gerçekleştirilmiştir. Bu çalışmada bilgisayarda
hazırlanan yazılım Microchip firması tarafından geliştirilmiş PIC serisi 16F84 denetleyicisine
yüklenerek, üç fazlı asenkron motorlarda klasik yol verme metotları denetleyici yardımıyla
uygulanmıştır. Kontaktör, yardımcı röle, zaman rölesi gibi elemanlara gerek kalmaksızın klasik
yol verme yöntemleri gerçekleştirilmiştir. Kapladığı alan, giriş-çıkış terminallerinin
kullanılabilmesi ve hassasiyet boyutunda klasik kumanda sistemine göre PIC ile yapılan
sistemin sağladığı avantajlar görülmüştür. Ayrıca yazılımın değiştirilmesi, fiyat, çevre birimleri,
17
İ. Çolak ve R. Bayındır
kolay programlama, kullanım esnekliği ve ucuzluğu gibi üstün özelliklere sahip olması,
pratikliği ve sürenin değiştirilerek yazılımın yüklenebilmesi kolaylığından dolayı bu
uygulamada PIC uygulama çalışmalarını oldukça kolaylaştırmıştır.
Yapılan çalışma ile endüstriyel uygulamalarda kullanımı oldukça yaygınlaşan asenkron
motorlara yol vermede kullanılabilecek yol verme metotları üç fazlı bir alternatif akım motoru
kullanılarak PIC 16F84 denetleyici ile gerçekleştirilmiştir. Bu ve buna benzer motor kontrol
uygulamalarının daha basit ve güvenilir şekilde PIC ile yapılabileceği gösterilmiştir.
Kaynaklar
1. Y. Türkmen, C. Gençtan, Kumanda Devreleri 1, Yeniyol Matbaası, İzmir, 1998.
2. Y. Türkmen, C. Gençtan, Kumanda Devreleri 2, Yeniyol Matbaası, İzmir, 1998.
3. W. N. Alerich, Electric Motor Control, Delmar Publishers, New York, 1988.
4. H. Gümüşkaya, Mikroişlemciler ve 8051 Ailesi, Alfa Basım Yayım Dağıtım Ltd. Şti., İstanbul, 1998.
5. H. Ateş, R. Bayındır, PIC Kontrollü Sürtünme Kaynak Makinesi Tasarımı ve Uygulaması, Zonguldak
Karaelmas Üniversitesi, Teknik Eğitim Fakültesi, Teknoloji Dergisi, Yıl 6, Sayı 3-4, 107-114, 2003.
6. İ. Çolak, R. Bayındır, Ö.F. Bay, Reactive Power Compensation Using A Fuzzy Logic Controlled
Synchronous Motor, Energy Conversion And Management, Vol. 44, Issue 13, Pages 2059-2215,
2003.
7. İ. Çolak, R. Bayındır, Güç Katsayısının Bir Mikrodenetleyici Kullanarak Ölçümü, Erciyes
Üniversitesi Fen Bilimleri Enstitüsü Dergisi, Cilt 19, Sayı 1-2, 50-58, 2003.
8. İ. Çolak, Asenkron Makinalar, Nobel Yayıncılık, Ankara, 2001.
9. N. Gardner, PIC Programlama El Kitabı, Editör: Elk. Müh. Gökhan Dinçer, Bileşim Yayıncılık,
İnfogate, İstanbul, 1998.
10. O. Altınbaşak, Mikrodenetleyiciler ve PIC Programlama, Melissa Matbaacılık İstanbul, 2000.
18