8. ÜNİTE
SENKRON MOTORLAR
KONULAR
1. Senkron Motorların Yapıları ve Çalışma Prensipleri
2. Senkron Motorlara Yol verme
3. Senkron Motorların Kullanıldıkları Yerler
4. Senkron Makinelerde Kayıplar ve verim
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
Üç Fazlı Senkron Motorlar
Senkron devirle dönen motorlara senkron motor denir. Senkron devir, 3 faz
alternatif manyetik döner alanın devir sayısıdır. Asenkron motorlarda rotor, döner
alan devrinden bir miktar (kayma oranı kadar) yavaş döner. Örneğin senkron devri
3000 d/d olan bir asenkron motor %5 kayma ile dönerse rotor devri 2850 d/d olur.
Senkron motorlar da ise rotor devir sayısı döner manyetik alan devir sayısına eşittir.
Örneğin senkron devri 3000 d/d olan bir senkron motorun rotor devri de 3000 d/d
olur.
Senkron devir aşağıdaki formül ile bulunabilir.
: Senkron devir sayısı
f : Çalışma frekansı
2p : Kutup sayısı
8.1. Senkron Motorların Yapıları ve Çalışma
Prensipleri
Senkron motorlar, yükü değiştiği halde devir sayısı sabit kalan motorlardır.
Eğer yükün momenti, motorun en yüksek momentinden büyük olursa motor durur.
Motor senkron hızda döndüğü için devir sayılan yalnız frekans ve kutup sayılarına
bağ­lıdır.
Bu sebeple bu motorları senkron motor adı verilmiştir.
Bir senkron motorla asenkron motorun karşılaştırmasını yapalım:
• Senkron motorlarda iki cins kaynak vardır. Bunlarda stator alternatif akım­la
beslenir.
• Asenkron motorlarda ise tek kaynak olup, yalnız stator alternatif akımla
beslenir.
• Güç katsayısı asenkron motorlarda daima endüktiftir. Senkron motorlarda
ise, kutupların az veya çok uyartılışına göre omik, endük­tif veya kapasitif
olabilir.
• Asenkron motorların devir sayısı yükle değişir. Senkron motorların ise
daima sabittir.
8.1.1. Senkron motorların yapılan
Senkron motorların yapılan aynen senkron generatörler gibi olup aralarında hemen hiç fark yoktur. Doğru akım makineleri hem motor ve hem de dinamo olarak çalıştırılabiliyordu. Senkron makineler de ayni şekilde motor veya generatör olarak çalıştırılabilir.
221
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
Nitekim, şebekeye paralel bağlı bir alternatörün döndürücü motorunu
durdur­duğumuzda, alternatörün durmadığı ve senkron hızla çalışmasına devam
ettiği görü­lür.
Yalnız senkron motorlar kendi kendilerine harekete geçemediklerinden
kutup­larına kısa devre çubukları ve hatta bazılarında sargı dahi yerleştirilmiş olabilir.
Böyle­ce motor ilk anda aynen bir asenkron motor gibi yol alır.
8.1.2. Senkron motorların çalışma prensibi
Senkron motorların ilk hareket momentleri yoktur. Bu bakımdan senkron mo­
torlar kendi kendine yol alamaz.
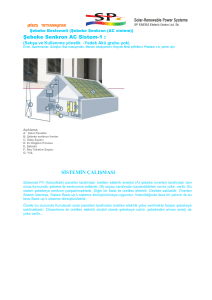
Senkron motorun yol alma anını Şekil: 8.1 a da inceleyelim. Burada kutup­lar
sabit, sargılar hareketli kabul edilmiştir. Kutuplara doğru akım, sargılara alternatif
akım uygulandığı ilk anı ele alalım. Sargılardaki akım ilk anda a kenarında giriş (+),
Şekil 8.1 Senkron motorun yol alma anındaki durumu
222
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
b kenarında çıkış ( . ) olsun. Sol el kuralına göre bobin sağa doğru itilecektir.
Fakat bobin harekete geçmek isterken a - b kenarlarındaki akım yön değiştirecek
ve a kena­rında çıkış, b kenarında giriş yönünde olacaktır. Akımın hemen yön değiştirişi ile bo­bin kenarları bu defa sola doğru itilecektir. Arkasından akım yine yön
değiştireceğin­den itilme sağa doğru olacaktır.
Sonuç olarak a — b iletkenleri, uygulanan alternatif gerilimin frekansına göre
(f =50 Hz. ise) saniyede 50 defa sağa, 50 defa sola itilecektir. Bu durumda bobin veya
üzerinde bulunduğu demir kütle, ataletinden dolayı, olduğu yerde kalarak bir tit­
reşim yapar.
Şimdi biz, bobine dışardan bir kuvvet uygulayarak öyle bir hız verelim ki, me­
sela bobinin a kenarındaki akım yön değiştirdiği an bu kenar diğer kutbun altına
gel­miş olsun.Şekil: 8.1 b de a kenar giriş, b kenar çıkış olduğuna göre sağa doğru
itilir. Bobini dış etki ile itelim ve a kenar S, b kenar N kutbu altına geldiği an akım
yön de­ğiştirmiş olsun. Bu durumda bobin yine sağa doğru itilecektir. Böylece bobin
veya üzerinde bulunduğu kütle dönüşüne devam eder.
Motor bir defa yol aldıktan sonra, hep aynı yönde itilme meydana geleceğin­
den, dönen kısımda döndürücü bir kuvvet veya moment doğar ve çalışmasına devam eder.
Burada inceleme tek bobin için yapılmıştır. Statoruna üç fazlı alternatif akım
uygulanan ve döner alan meydana gelen motorda da durum aynıdır. Mesela iki
kutup­lu bir makinede f =50 Hz. için statorda meydana gelen döner alanın hızı dakikada 3000, saniyede 50 devirdir. Bu değişim anında stator döner alan kutupları
(Asenkron motor­ların aynıdır), rotor kutuplar ile kavrama yapıp rotoru döndüremez.
Çünkü rotorun ve kutupların ataleti, saniyenin 1/50 sinde senkron hıza çıkmasına
engel olur. Ancak dışardan bir etki ile rotor senkron hıza veya ona çok yakın bir hıza
çıkarılırsa, rotorun N kutbu statorun S kutbu ile birleşir. Bir defa bu manyetik kavrama olduktan sonra, artık rotor stator döner alanı ile birlikte dönüşüne devam eder.
Senkron motorların çalışma prensibini açıklayınız?
8.2.Senkron Motorlara Yol verme
Yukarıdaki açıklamalardan da anlaşılacağı üzere senkron motorlara, asenkron
motorlarda olduğu gibi, doğrudan doğruya yol verilemez. Bu sebeple senkron motorları çalıştırmak için, çeşitli metotlarla rotorunun devrini senkron veya ona yakın
hıza çıkarmamız gerekir.
8.2.1.Yardımcı motor kullanarak senkron motorlara yol
verme
223
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
8.2.1.1.Asenkron motorla
Senkron motora yol verebilmek için yardımcı bir kuvvete ihtiyaç vardır. Bu
dön dürücü kuvvet genellikle senkron motorla sağlanır. Motorun gücü, senkron
motor gücü­nün % 5 —10’u dolayındadır. Senkron motora yol verileceği zaman aynen alternatörün çalıştırılması ve dev­reye paralel bağlanması gibi hareket edilir.
Senkron motora yol verme işlemi şöyle yapılır:
Yardımcı motor çalıştırılarak senkron motorun devir sayısı, döner alan devir sayısına veya yakın bir değere çıkarılır. Kutupları uyartılarak senkron motorun gerilim
vermesi sağlanır. Alternatörlerin paralel bağlanmasında olduğu gibi söner ışık veya
diğer bir bağlantı ile senkronizm anı tespit edilir ve şalter kapatılır. Soma yardımcı
motor devreden çıkarılarak, mekanik bir (üzenle senkron motor milinden ayrılır.
Senkron motor devreye Ok defa bağlanıyorsa, faz sıralarının aynı olman gere­
kir. Bunun için yine alternatörlerde olduğu gibi yardımcı motor kullanılır.
8.2.1.2.Uyartım dinamosunu motor olarak kullanmak
Genellikle her senkron motorun miline bağlı bir uyartım dinamosu vardır, öy­
leyse bu dinamodan motor olarak faydalanmak mümkündür. Yol verme şöyle yapılır:
Dışardan bir doğru akım kaynağından beslenen uyartım dinamosu, motor ola­
rak çalıştadır. Senkron motorun senkron hıza çıkması sağlanır. Senkron hıza ulaşıldığında motor statoruna alternatif akım uygulanır. Döner alan etkisi ile kutuplarda
tesirle mıknatıslanma olur ve rotor döner alan tarafından çekilerek dönmeye başlar.
Uyartım dinamosu doğru akım kaynağından ayrılır ve dinamo olarak senkron moto­
run kutupları uyartılır. Uyartım akımı yavaş yavaş arttırılır. Eğer döner alan kutupları
ile, rotor kutupları karşılıklı aksi adlı değilse, rotor geriler ve bir sonraki kutupla kilit­
lenerek dönmesine devam eder. Bu tip yol verme daha çok başta yol alan ve çıkıntılı
kutuplu senkron motor­lara uygulanır.
8.2.2.Senkron motoru asenkron motor gibi çalıştırarak
yol verme
8.2.2.1.Sincap kafesti asenkron motor olarak yol verme
Senkron motorlara yol verme için en çok uygulanan yol budur. Bunun için rotorun kutup ağızlarına kısa devre çubukları yerleştirilir. Bu çubuklar aynen asenk­ron
motorlarda olduğu gibi pirinç, bronz veya bakırdan yapılmış ve iki tarafından kı­sa
devre edilmiştir.
Senkron motor statoruna bir gerilim uygulandığında, rotor aynen sincap ka­
224
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
fesli bir asenkron motor gibi dönmeye başlar ve senkron hıza çok yakın bir devir
sayı­sına çıkar.
Senkron motor yol alırken, aynen asenkron motor gibi devreden normal akı­
mının 3 - 6 katı arasında akım çeker. Bu akımı azaltmak için, asenkron motorlara
uy­gulanan yol verme sistemleri, senkron motorlarda da kullanılır.Mesela, bu motorlara yıldız - üçgen şalterle veya oto transformatörle yol verilir. Senkron motor
yol aldıkça yol alma akımı azalır. Senkron hıza yakın devirler­de akım, normal akımın
yansı dolayına düşer.
Asenkron motor olarak yol vermede ilk anda kutup sargıları doğru akım
kaynağından ayrılır ve bir direnç üzerinden kısa devre edilir. Çünkü ilk harekette döner alan kutup sargılarını büyük bir hızla keseceğinden, uyartım devresinde
bir gerilim endüklenir. Kutup sargılarının sarım sayısı fazla olduğundan endüklenen gerilim çok yüksek olur. Bu gerilimin bazen 35 000 Volta kadar yükseldiği görülmüştür. Bunun için de kutup sargılarının yalıtkanlığının çok iyi olması gerekir.
Kutup sargılarının kısa devre edilmesinde küçük bir direnç kullanılır. Devreden geçen akım, gerilimin büyük kısmının sargılar üzerinde düşmesini sağlar. Motor
senkron hıza yaklaştığında kesme hızı azaldığı için kutuplarda endük­lenen gerilim
çok düşer. Bu an kısa devre direnci devreden çıkarılır ve kutuplara doğru akım uygulanır. Böylece kutupların döner alanla manyetik kilitlenmesi kolaylaşır.
Senkron motora yol vermede uyartım devresi niçin bir direnç üzerinden
kısa devre edilir?
8.2.2.2.Bilezikli asenkron motor olarak yol verme
Yük altında yol alması gereken yerlerde, daha yüksek kalkınma momenti sağlamak için senkron motorun kutuplarına sargılar yerleştirilir. Bu sargıların yapılışı aynen sargılı rotorlu asenkron motorlarda olduğu gibidir. Senkron motora yol verme
direnci kullanarak yol verilir. Böylece yüksek kalkınma momenti sağlanır.
Motorda yapılan diğer işlemler, aynen sincap kafesli motorda olduğu gibidir.
Asenkron motor prensibiyle yol vermede, motor senkron hıza ulaştıktan sonra, yol verme sargısı ve çubuklar üzerinde artık gerilim endüklenmez. Çünkü rotor
senkron hızla döndüğünden kısa devre çubukları veya sargıları döner alan tarafından kesilmez. Bu sebeple bu sargıların motora bir etkisi olmaz.
Senkron motoru asenkron motor gibi çalıştırarak nasıl yol veririz?
8.2.3.Küçük frekansla yol verme
Bu metot, motorun bağımsız bir alternatörü varsa uygulanır. Motor ve alterna­tör beraber çalıştırılır. Alternatörün frekansı yavaş yavaş artacağından, devresine bağlı senkron
225
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
motorun statorundaki döner alanın hızı da sıfırdan başlayarak artar. Böylece rotor senkron
hıza çıkarılır.
8.3. Senkron Motorların Kullanıldığı Yerler
8.3.1.Genel kullanma yerleri
Senkron motorlar, hızlan mutlak olarak değişmemesi istenen yüklerde kullanılır. Bu motorlar güçleri 20 BG. (Beygir gücü) ve daha yüksek güçlerde yapılırlar. Küçük
işletmelerde senkron motordan, hem bir iş tezgahının çalıştırılmasında ve hem de
işletmenin güç kat sayısının düzeltilmesinde faydalanılır.
Büyük elektrik tesislerinde yalnız şebekenin Cos sini düzeltmek amacı ile
senkron motorlar kullanılır. Bunlar boşta çalışır ve şebekenin durumuna göre otomatik olarak uyartım akımları ayarlanır. Bu motorlara senkron kapasitör adı da verilir. Senkron kapasitörler herhangi bir mekanik yükü beslemez. Bu sebeple yapılan
narindir ve normal bir senkron motora oranla daha ucuzdur.
Senkron kapasitörler KVA cinsinden sıfır ileri güç katsayısına göre değerlendirilirler.
8.3.2. Senkron motorlarla güç katsayısının düzeltilmesi
8.3.2.1. Güç katsayısının düzeltilme ihtiyacı
Bir şebekede yükün önemli bir kısmı asenkron motorlardan oluşur. Asenkron
motorlar endüktif karakterde akım çektiklerinden şebekenin Cos sini bozarlar.
Güç katsayısının birin altına düşmesi, şebekede bulunan alternatör, transformatör ve enerji iletim hatlarının gereksiz yüklenmesine ve buralarda meydana gelen kayıpların artmasına sebep olur. Bütün bunlar şebekede bulunan makine ve iletim sistemlerinden ekonomik olarak tam faydalanmamıza engel olur. Bir problemle
durumu inceleyelim.
8.3.2.2 Senkron motorla Cos ‘nin düzeltilmesi
Bir senkron motor, öncede belirtildiği gibi, devrede iki şekilde çalışır. Senkron
kapasitör olarak çalıştıklarında güç katsayıları sıfır olup çektikleri akım kapasitiftir.
Diğer senkron motorlar ise, genellikle aşın uyartımda çalıştırılırlar. Bunlar Cos = 1
veya 0,8 ileri güç katsayısında çalışacak şekilde düzenlenirler.
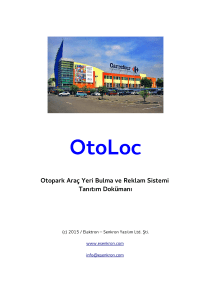
Bir devrenin güç katsayısının ileri veya geri oluşuna göre aktif, reaktif ve görünür güçlerinin vektöryel durumu Şekil: 8.2 de görülmektedir.
226
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
Şekil 8.2 Güç katsayısının geri (a) veya ileri (b) oluşuna göre güç vektörleri
Şekil: 8.2-a’da geri güç katsayılı, b de ise ileri güç katsayılı yükün vektör diyagramları verilmiştir. Bilindiği gibi burada (Bir faz için):
Görünür Güç Pg = U.I
Hakiki Güç
P=U.I. Cos =Pg. Cos w.
Kör Güç
Pk= U.I. Sins =Pg.Sin VAR dır.
Görünür Güç Pisagor Teoreminden:
Bir Devrede Güç Katsayısı Cos :
Şekil 8.2’deki vektör diyagramlarına dikkat edilirse, geri güç katsayısındaki
ile, ileri güç katsayısındaki nin yönleri birbirine zıttır. Bu iki güç aynı devrede çalıştıklarında devrenin toplam gücü :
Devrenin toplam görünür gücü;
Devrenin yeni güç katsayısı:
227
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
Örnek:
Üç fazlı bir tesisin gücü 4000 kw. Olup güç katsayısı 0,8endüktiftir. Devreye
=0 ileri)gücü ne olmalıdırki devrenin
bağlanacak olün senkron kapasitörün (
güç katsayısı 1’e eşitlensin.
Çözüm :
Sistemin reaktif gücü;
=
=5000.0,6=KVAR.
Bu devrede reaktif gücü yok etmek için kullanılacak senkron kapasitörün gücü
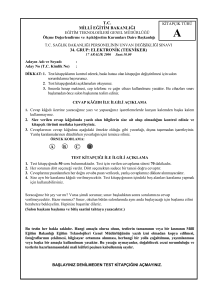
P2=S3000 KVA olmalıdır. Devrenin müşterek vektör diyagramını çizersek Şekil: 8.3
elde edilir. Şekilden de görüleceği gibi senkron kapasitörün gücü P2, devrenin kör
gücü e eşit ve ters yönde olmaktadır. Bu durumda devrede
Şekil 8.3 Senkron kapasitör kullanıldığında devrenin vektör diyagramı
8.4. Senkron Makinelerde Kayıplar ve Verim
8.4.1. Senkron makinelerde kayıplar
Senkron makinelerin kayıpları da, diğer makinelerde olduğu gibi demir, bakır
ve sürtünme kayıpları olmak üzere üç ana grupta toplanır.
8.4.1.1. Demir Kayıpları
Statorda ve kutup uçlarında meydana gelen Fuko ve Histerezis kayıplarıdır.
Kutup uçlarında meydana gelen kayıplar çok küçük olduğundan dikkate alınmasa
da olur.
228
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
Demir kayıpları manyetik alanla oranlıdır. Manyetik alan sabit olduğuna göre
statorda meydana gelen demir kayıpları da hemen hemen sabittir.
8.4.1.2. Bakır kayıpları
Bakır kayıplarım uyartım devresi bakır kayıpları ve stator sargılarında meydana gelen bakır kayıpları olarak ikiye ayırırız. Bunlardan uyartım devresi bakır kayıpları makine kutuplarını uyartmak için harcanan güçtür. Uyartım dinamosu kayıpları
senkron makinenin kayıplarına eklenmez. Yalnız senkron makine uyartım direnci
kaybı makine kayıplarına dahil edilir.
Endüvi devresi bakır kaybı ise, stator sargılarının etkin direncinden dolayı mey
dir.
dana gelen bakır kayıpları olup üç fazlı makinelerde
Senkron makinelerde meydana gelen kayıplar nelerdir?
8.4.1.3. Sürtünme ve rüzgâr kayıpları
Bu kayıplar da yatak sürtünmesi, rotorun hava ile sürtünmesi ve soğutma için
kullanılacak pervanelerin meydana getirdiği kayıplardır. Sürtünme ve rüzgâr kayıpla n devir hiç değişmediğinden sabittir.
8.4.2. Senkron makinelerde verim
Senkron makinelerin verimi de, diğer elektrik makinelerinde olduğu gibi, direk metotla veya kayıpların bulunması yolu ile hesaplanır.
8.4.2.1. Direk metotla verim hesabı
Direk metotla alternatörün verimi bulunuyorsa, makine bir yükle yüklenir. Alternatörün verdiği ve çevirici makinenin çektiği güç ölçülür. Çevirici makinenin verim eğrisinden alternatöre verilen güç bulunur.
Motor halinde ise, yine verim eğrisi bilinen bir yük makinesi ile motordan alınan güç bulunur. Veya fren kullanarak motor milindeki moment ve devir sayısı ölçülür.
Kw. Olarak alınan güç hesaplanır.
Motora verilen güç ise Watmetre veya Ampermetre, Voltmetre ve
yardımı ile ölçülür.
metre
Alman ve verilen güçten verim :
Formülü ile bulunur.
229
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
Direkt metotla senkron makine verimi nasıl hesaplanır?
8.4.2.2. Endirek metotla verim hesabı
Büyük güçlü senkron makinelerin verimi yükleme zorlukları ve maliyeti arttırması sebebi ile direk metotla bulunmaz. Bunun için kayıplar hesaplanır ve endirek
tmetot kullanılır.
Burada kayıpların bulunuşunda en basit yollan kullanacağız. Bu sebeple bulunacak verim biraz hatalı olacaktır.
Sürtünme ve demir kayıpları makinenin boş çalışmasından bulunur. Bunun
için makine normal uyartımda motor olarak çalıştırılır. Makinenin devreden
çektiği güç bu kayıplara sarf olduğu kabul edilir. Her nekadar stator bakır kayıpları
ölçülen bu kaybın içindeyse de, normal uyartımda stator akımı çok küçük olduğundan dikkate alınmaz.
Uyartım devresi gerilimi ve akımı ölçülerek uyartım kayıpları bulunur.
dir. Bu kayıpta uyartım akımına göre değişir. Fakat genelBurada
likle normal uyartımdaki değer alınır.
Endüvi devresi bakır kaybı ise, Re hesaplanarak bulunur. Bunun için stator faz
ile etkin direnç hesadirencinin doğru akım değeri ölçülür. Bu değerden
olur.
bedilir. Endüvi devresi bakır kaybı üç fazlı makine için
Yapılan ölçmelerle kayıpları bulunan bir alternaatörün verimi:
Senkron Motorun verimi;
Örnek :
100 KVA, 2400 Volt, 50 Hz.’lik üç fazlı yıldız bağlı bir alternatörün etkin di­renci
1,2 ohm dur. Alternatörün sürtünme ve demir kaybı 4 kw.’tır. Alternatör güç katsayısı
0,8 tam yükle yüklenmiştir. Bu durumda uyartım devresi gerilimi 110 volt, akımı 30
Amperdir. Alternatörün verimini bulalım.
Çözüm :
230
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
Makine Yıldız bağlı olduğundan:
Stator bakır kaybı
Uyartım kaybı
Demir ve sürtünme kaybı
Alternatörden alınan güç:
Kayıplar
Alternatörün verimi
olur.
Senkron makine aynı şartlar altında motor olarak çalışsaydı verimi:
231
1. SINIF ELEKTRİK TESİSATÇILIĞI
ELEKTRİK MAKİNALARI VE LABORATUVARI
DEĞERLENDİRME SORULARI
Aşağıdaki soruları dikkatlice okuyunuz ve doğru seçeneği işaretleyiniz.
1. Senkron Motorlar;
a. Devir sayısı değişken motorlardır.
b. Yük değiştiği halde devir sayısı sabit kalan motorlardır
c. Güç katsayısı daima endüktif olan motorlardır.
d. Hiçbiri
2. Senkron motorlara asenkron motorlara yol vermede asenkron motor gücü
senkron motor gücünün yüzde kaçı olmalıdır?
a. % 2 si
b. % 1 i
c. % 5-10 u
d. % 25 i
3. Senkron motor devreden ilk kalkınma anında normal akımın kaç katı akım
çeker?
a. 2 - 3 katı
b. 10 katı
c. 3 - 6 katı
d. 12 katı
Aşağıdaki cümlede boş bırakılan yerlere getirilecek bilgilerin bulunduğu
seçeneği işaretleyiniz.
4. Büyük elektrik tesislerinde yalnız şebekenin………………………. düzeltmek
amacıyla senkron motor kullanılır
.
232