motorlar elektrik")
DC MOTOR HIZ KONTROLÜ
DC (Doğru Akım) motorlar elektrik enerjisini mekanik enerjiye çevirirler. Bir DC motor Şekil
1’de ve motoru oluşturan parçalar ise Şekil 2’de gösterilmektedir.
Şekil 1. DC Motor.
Şekil 2. DC Motor’u oluşturan parçalar.
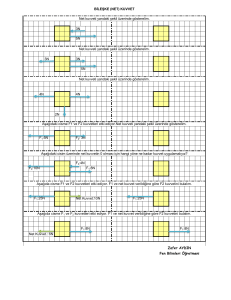
Bir DC motorun kapalı çevrim kontrolü Şekil 3’de gösterilmiştir. Burada motorun hızı kontrol
edilmek istenmektedir. Referans hız, input olarak sisteme girilmektedir. Sistem modeli
aşağıdaki denklemlerde gösterildiği gibi kurulmaktadır. Sistem kontrolcüsü PID olarak
tasarlanmaktadır. Bilgisayar üzerinden gönderilen referans hız komutu bir mikro-processor’e
ulaşmaktadır. Mikro-processor ile DC motor arasındaki etkileşimi ise motor driver
sağlamaktadır. DC motor üzerine entegre edilen bir enkoder ile motorun dönüş hızı elde
edilmekte ve bu bilgi geri bildirim olarak kontrol sistemine gönderilmektedir.
Şekil 3. DC motor kapalı çevrim kontrolü.
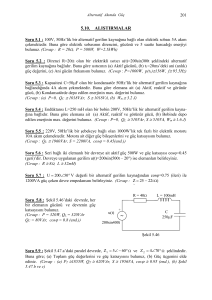
DC motor fiziksel sistemi Şekil 4’de gösterilmektedir. Motor sistem modeli buna göre
kurulmaktadır.
Şekil 4. DC motor fiizksel sistemi.
Motor tork’u şu şekilde ifade edilebilir.
T = K ti
(1)
Bu denklemde tork T ile, tork katsayısı Kt ile ve sistemin çektiği akım i ile gösterilmektedir.
Back emf ile motor açısal hızı arasınındaki ilişki aşağıdaki şekilde gösterilir. Burada Ke motor
sabit değeridir.
e = K e θ
(2)
Şekil 4’e göre, Newton’un ikinci kanunu ve Kirchhoff voltaj yasasını kullanarak aşağıda
verilen eşitlikleri elde edebiliriz:
J
θ + bθ = Ki
di
L + Ri = V − Kθ
dt
(3)
Denklem (3)’e Laplace kuralı uygulanırsa, aşağıda verilen eşitlikler elde edilir.
s ( Js + b ) θ(s) = ( K ) I(s)
( Ls + R ) I(s) = V(s) − ( Ks ) θ(s)
(4)
Denklem (4) kullanılarak DC motor açık çevrim transfer fonksiyonu aşağıdaki şekilde
bulunabilir:
P(s) =
K
θ (s)
⎡ rad / s ⎤
=
2 ⎢
V(s) ( Js + b )( Ls + R ) + K ⎣ V ⎥⎦
(5)
Modelde kullanılan sabir değerler aşağıdaki gibidir:
J = 0.01 kg.m2 , b = 0.1 N.m.s, Ke = 0.01 V/rad/s, Kt = 0.01 N.m/A, R = 1 Ohm, L = 0.5 K.
PID kontrolcüsü transfer fonksiyonu aşağıdaki denklemle verilebilir:
C(s) = K p +
Ki
+ K ds
s
(6)
 motorlar elektrik")