T.C.
KARADENİZ TEKNİK ÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
MANYETİK AMORTİSÖR
TOLGA YASAN
MURAT ŞEN
Danışman
PROF. DR. ADEM SEFA AKPINAR
Mayıs 2012
TRABZON
T.C.
KARADENİZ TEKNİK ÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
MANYETİK AMORTİSÖR
210340 Tolga YASAN
210396 Murat ŞEN
Danışman
Prof. Dr. Adem Sefa AKPINAR
Mayıs 2012
TRABZON
LİSANS BİTİRME PROJESİ ONAY FORMU
Tolga YASAN ve Murat ŞEN tarafından Prof. Dr. Adem Sefa AKPINAR yönetiminde
hazırlanan “MANYETİK AMORTİSÖR” başlıklı lisans bitirme projesi tarafımızdan
incelenmiş, kapsamı ve niteliği açısından bir Lisans Bitirme Projesi olarak kabul edilmiştir.
Danışman
: Prof. Dr. Adem Sefa AKPINAR
………………………………
Jüri Üyesi 1
: Prof. Dr. Cemil GÜRÜNLÜ
………………………………
Jüri Üyesi 2
: Yrd. Doç. Dr. H. İbrahim OKUMUŞ
………………………………
Bölüm Başkanı
: Prof. Dr. İ. Hakkı ALTAŞ
………………………………
ÖNSÖZ
Bu tez bitirme projesi dersi kapsamında Manyetik Amortisör projesi için hazırlanmıştır.
Mühendisliğe ilk adım olarak tabir ettiğimiz bu proje bizim için çok önemli bir aşama
olmuştur.
Projemizin başlangıcından, son anına kadar bizden desteklerini esirgemeyen ElektrikElektronik mühendisliği bölüm başkanlığına, başta Sn. Prof. Dr. Sefa AKPINAR dâhil
bütün hocalarımıza ve asistanlarımıza, ayrıca tezin düzenlenmesi aşamasında bize yardımcı
olan sevgili Emine KARTAL arkadaşımıza, bizim bu günlere kadar gelmemizde büyük
katkıları olan ailelerimize teşekkürü bir borç biliriz.
Mayıs, 2012
Tolga YASAN
Murat ŞEN
iii
İÇİNDEKİLER
Sayfa No
Lisans Bitirme Projesi Onay Formu…………………………………………..……...............ii
Önsöz ………………………………………………………………………………...iii
İçindekiler…………………………………………………………………………….iv
Özet…………………………………………………………………………………..vi
Semboller Ve Kısaltmalar……………………………………………………………vii
Şekil Listesi……………………………………………………………………..........ix
1. Giriş…………………………………………………………………………..…...1
1.1. Amortisör Ve Manyetik Amortisör………………………………...……1
1.2. Neden Manyetik Amortisör……………………………………………...2
2. Teorik Altyapı....……………………………………………………………...….3
2.1. Manyetik Alan Nedir?..............................................................................3
2.2. Amper Yasası………………...………………………………………….5
2.3. Manyetik Direnç………………..………………………………………..6
2.4. Endüktans………………..………………………………………………7
2.5. Bağıl Manyetik Geçirgenlik………………..…………………………....7
2.6. Kaçak Akı………………..………………………………………………8
2.7. Akı Sapması………………..…………………………………………....8
2.8. Girdap Akımı Kayıpları……………….………………………………...8
2.9. Mekanik Denklemlerin Yazılması……………….……………………....9
2.10. Açma Kapama Olayları………………………………………………...9
2.10.1. Hareketin Çok Hızlı Olması Durumu………………...9
2.10.2. Hareketin Çok Yavaş Olması Durumu……………….10
2.10.3. Hareketin Ne Hızlı Ne Yavaş Olması Durumu...…….10
2.11. Kesit Hesaplama……………………………………............................11
2.12. Amortisör Çeşitleri……………………………………………………..11
2.12.1. Elektro-Dinamik Amortisör…………………………...11
2.12.2. Elektro-Manyetik Amortisör……………………….....12
2.13.Manyetik Amortisörlerin Bu Amortisörlere Göre Farkı………………..12
iv
2.14. Projemizin Benzer Konuları ve Farklılığı……………………………...13
2.15. Sensörler…………………………………………………………….....14
2.15.1. Algılayıcı (sensör) Nedir?...........................................14
2.15.2. Algılayıcı (sensör) Çeşitleri..…………………………15
2.15.3. Kullanacağımız Algılayıcı (sensör)…………………..15
2.15.4. Sharp GPY2Y0D805Z0F Sensör...…………………..16
2.15.5. Neden Sharp GPY2Y0D805Z0F Sensör………….….18
2.15.6. Sensörün Bağlanışı..………………………………….18
3. Tasarım…………………………………………………………………………...19
3.1. Trafo E Sacı…………..………………………………….19
3.2. Trafo I Sacı…………...…………………………………..20
3.3. Hareketsiz Kısım……..…………………………………..21
3.4. Sargılar………………..………………………………….22
3.5. Hareketli Kısım……....…………………………………..22
3.6. Yaylar………………...…………………………………..23
3.7 Projenin Gerçekleşmesi.…………………………………..24
4. Deneysel Aşama…………………………………………………………………..26
5. Sonuçlar………………………………………………………………………………….27
6. Yorum ve Değerlendirme…..……………………………………………………..29
Kaynakça……………………………………………………………………………..30
Ekler………………………………………………………………………………….31
Ek1 (Standartlar ve Kısıtlar Formu)………………………………………………….31
Ek2 (Maliyet Tablosu)……………………………………………………………….33
Özgeçmiş……………………………………………………………………………..34
v
ÖZET
Hazırlamış olduğumuz bu tez “Manyetik Amortisör” konulu projenin tezidir. Bu tezde
“Manyetik Amortisör” oluşturulurken yapılan araştırma, tasarım ve proje aşamaları
bulunmaktadır.
Daha önce denenmemiş bir proje olan manyetik amortisör endüstriyel alandan
kullanılan normal amortisörlerden kısa ömürlü, pahalı, kullanışlı olmaması nedeni ile
tasarlanmamıştır.
Manyetik levitasyon, manyetik alan yardımı ile cisimlerin havada asılı kalması olayıdır.
Bunun en belirgin örneği günlük hayatta yeni kullanılmaya başlamış Mag-Lev trenleridir.
Bilindiği üzere bu trenler yerden yaklaşık 10mm yukarda hareket ederler. Mag-Lev trenleri
manyetik amortisör projesine gösterilebilecek bir örnektir.
Normal amortisörlerin etki-tepki prensibine göre çalışması nedeniyle istenmeyen bir
durum ortaya çıkmaktadır. Hazırlamış olduğumuz bu proje bu durumu ortadan kaldırmak
için uygulanacak ilk projedir.
Ek-1’ de standartlar ve kısıtlar formu ve Ek-2’ de projenin 2012 yılı için maliyet tablosu
çizelgesi gösterilmiştir.
vi
SEMBOLLER ve KISALTMALAR
E:
Elektrik alanı
Fe:
Elektriksel kuvvet
q:
Yük
B:
Manyetik alan
V:
Gerilim
Fb:
Manyetik alan kuvvet
T:
Tesla alan büyüklüğü
Ø:
Akı
A:
Yüzey
H:
Akı yoğunluğu
µ:
Manyetik geçirgenlik
N:
Sarım sayısı
F:
Kuvvet
R:
Relüktans (manyetik direnç)
L:
Endüktans
µ0:
Boşluğun manyetik geçirgenliği
µr:
Cismin manyetik geçirgenliği
l:
Akı yolu uzunluğu
m:
Metre
vii
Øf:
Faydalı akı
Øk:
Kaçak akı
W:
Güç
Mag-Lev: Manyetik levitasyon
MR:
Manyetik rezonans
MMK:
Magnetomotor kuvvet
EMK:
Elektromotor kuvvet
IRED:
Infrared (kızıl ötesi ışık kaynağı)
PSD:
Pozisyon algılayıcı
PLC:
Programlanabilir lojik kontrolör
PID:
Oransal integral türev denetleyici
viii
ŞEKİL LİSTESİ
Sayfa No
Şekil 1.
Sağ el kuralının uygulanması……………………………………………………4
Şekil 2.
A yüzeyinden geçen Q akısı…………………………………………………......5
Şekil 3.
Magnetomotor kuvvetin eşdeğer devresi………………………………..............6
Şekil 4.
Hareketin çok hızlı olması durumunda akı-akım grafiği………….…………….9
Şekil 5.
Hareketin çok yavaş olması durumunda akı-akım grafiği …………………….10
Şekil 6.
Hareketin ne hızlı ne de yavaş olması durumunda akı-akım grafiği ……..……10
Şekil 7.
Elektro-dinamik süspansiyon……………………………………………..........11
Şekil 8.
Elektro-manyetik süspansiyon…...…………………………………………….12
Şekil 9.
Japonya’da bulunan Mag-Lev treni…………………………………..………..13
Şekil 10. Sharp GPY2Y0D805Z0F sensör………………………………………………16
Şekil 11. Sharp sensörün çalışma prensibi…...…………………………………………..17
Şekil 12. Sharp sensörün giriş ve çıkış uçları...………………………………………….17
Şekil 13. Sharp sensörün çalışma aralığı ve çalışma voltajı………………………..........18
Şekil 14. Trafo E sacı…………………………………………………………………….19
Şekil 15. 60 mm’lik trafo sacının boyutları………………………………………………19
Şekil 16. Trafo I sacı…………………………….……………………………………….20
Şekil 17. Trafo I sacının boyutları……………………..…………………………………20
Şekil 18. Manyetik amortisörün hareketsiz kısmı……………….……………………….21
Şekil 19. Hareketsiz kısmın boyutlandırılması…………………….……………………..21
Şekil 20. Sargının bulunduğu karkas…..…………………………………………………22
Şekil 21. Manyetik amortisörün hareketli kısmı………...……………………………….22
Şekil 22. Manyetik amortisörün hareketli kısmının boyutlandırılması..…………………23
Şekil 23. Manyetik amortisörde kullanılan çelik yay…………………………...………..23
Şekil 24. Hareketli kısma paket sacların montajı………………...………………………24
Şekil 25. Hareketsiz kısmın montajı…………...…………………………………………24
Şekil 26. Manyetik amortisörün son hali…………………………………………………25
Şekil 27. Sistemde enerji yokken ağırlık-uzaklık grafiği…...……………………………27
Şekil 28. Sistemde enerji varken ağırlık-uzaklık grafiği…...……………………………28
ix
1.GİRİŞ
1.1. AMORTİSÖR VE MANYETİK AMORTİSÖR
Büyük makinelerde çalışma esnasında oluşan sarsılma ve bu sarsılmalarda oluşan
titremeleri önlemeye yarayan alete amortisör adı verilir. Amortisör, oluşan bu sarsıntıları
hareket yönünün aksine yani tersine oluşan sarsıntı boyutu ile doğru orantılı, bir şekilde
direnç göstererek yok eder.
Gösterdikleri direnç nedeniyle oluşan sarsıntıları ve titreşimleri absorbe ederler. Büyük
güçte ve sarsıntılı çalışan makinelerde (otomobil, pres, iş makinesi, tekstil makinesi)
yoğun bir şekilde kullanılır. Amortisörün en çok karşılaştığı yer araçlardır.
Amortisörler genellikle tek başına kullanılmaz. Çünkü oluşan sarsıntıda açığa çıkan
enerjiyi absorbe etmek gerekir. Bu nedenle çoğu amortisörlerde bu enerjiyi absorbe etmek
için yay kullanılır.
İlk amortisörlerin kullanımı yaklaşık yüzyıl öncesine dayanmaktadır. İlk kullanılan
yaylar kalın çelik yaylardır. Bugün ise amortisörün hem endüstriyel hem de otomotiv aynı
zamanda inşaat sektöründe birçok kullanım alanı vardır.
Mekanik amortisörlerin kötü yanı sarsıntı ve titreşimi ısı enerjisine çevirerek yok
ederler, darbenin sertliğine göre ters tepki gösterirler, sürtünme olduğundan dolayı
ömürleri fazla değildir.
Mekanik amortisörlerin bu uygunsuzluklarını ortadan kaldırmak için hareketli taraf ile
hareketsiz taraf arasında bir sürtünme olmamalı yani iki taraf birbirine temas etmemelidir.
Burada manyetik amortisör olarak adlandırdığımız olay devreye girer. Manyetik amortisör
tamamen manyetik alan prensibi ile çalışan bir tip amortisördür. Cismin ağırlığını yenecek
kadar kaldırma kuvveti uygulamamız gerekir. Başka bir deyişle hareketli taraf ile
hareketsiz taraf arasında belirli bir aralık kalacak kadar bir kaldırma kuvveti uygulayarak
elde edeceğimiz amortisör türüdür. Tablo 1’de manyetik amortisör ile ilgili iş zaman
çizelgesi bulunmaktadır.
1
Tablo 1. İş zaman çizelgesi
TARİH
YAPILAN İŞ
MALZEMELERİN
BELİRLENMESİ
ANA GÖVDENİN
OLUŞTURULMASI
SAÇLARIN
PAKETLENMESİ
SARGILARIN
SARILMASI
PAKET SAÇLARIN
YAPIŞTIRILMASI
KUMANDA
DEVRESİNİN
OLUŞTURULMASI
SABİTLEME
İŞLEMLERİ
ÖLÇÜM
VE
TESTLER
TEZ’İN
HAZIRLANMASI
TESLİM
20-24
ŞUBAT
27ŞUBAT
-2MART
5-16
MAR
T
19-30
MART
2-14
NİSA
N
16-27
NİSA
N
1-11
MAYIS
1425MAY
IS
X
X
X
X
X
X
X
X
X
X
X
X
X
1.2.NEDEN MANYETİK AMORTİSÖR
1-) SÜRTÜNME ÇOK AZDIR.
Manyetik amortisörün en büyük avantajı sürtünmelerin çok az olmasıdır. Dolayısıyla
amortisör görevini yaparken mekanik amortisörler gibi sürtünme enerjisini ısı enerjisine
çevirerek tehlikeli bir ortam oluşturmazlar.
2-)GÜRÜLTÜLÜ ÇALIŞMAZLAR.
Normal amortisörler çok zorlandıkları zaman gürültüye sebep olur.
3-)ENERJİ KULLANIMI EN İDEAL SEVİYEDEDİR.
Küçük voltaj ve normal akımlarda bile çok ağırlık kaldırmamızı sağlarlar.
4-)GÜVENLİDİR.
Küçük voltaj seviyelerinde çalışabildiklerinden herhangi bir tehlike söz konusu
olmayacaktır.
2
2.TEORİK ALTYAPI
2.1. MANYETİK ALAN NEDİR?
Hareket eden elektrik yükleri tarafından, zamanla değişen elektrik alanlardan manyetik
alan üretilir. Manyetik alan iki farklı alandan oluşur. Vektörel bir büyüklüktür yani
herhangi bir noktada yönü ve kuvveti ile gösterilir. Manyetik alan genel olarak hareket
eden elektriksel yüke etki eden Lorentz kuvveti ile tanımlanır.[1]
E elektrik alanı içindeki bir noktaya hareketsiz olarak bulunan bir test yükü koyarsak
yüke etki eden elektriksel kuvvet Fe;
E = Fe / q
(1)
B manyetik alanı içinde hareket halindeki yüklü bir parçacığa etki gösteren manyetik
kuvvetin özellikleri şöyle sıralanabilir:
1) Parçacığa etkiyen kuvvetin büyüklüğü, parçacığın yüküne bağlıdır.[1]
2) Kuvvetin yönü ve büyüklüğü, B manyetik alanının büyüklüğü ve yönüne bağlı
olduğu gibi hızına da bağlıdır.[1]
3) Yüklü bir parça alan vektörüne paralel hareket ederse parçaya etkiyen manyetik
kuvvet sıfır olur.[1]
4) V ve B nin düzlemleri FB manyetik kuvveti düzlemine diktir.[1]
5) Parçacığın hız vektörü ile manyetik alan arasında q açısı varsa, parçacığa etkiyen
manyetik kuvvetin büyüklüğü sinq ile orantılıdır.[1]
Şekil 1’de manyetik alan kuramı için sağ el kuralı gösterilmektedir.
3
Şekil 1. Sağ el kuralının uygulanması[1]
(a) Sağ el kuralının uygulanması
(b) Pozitif yükler için sağ el kuralının uygulanması
(c) Negatif yükler için sağ el kuralının uygulanması
Elektrik ve manyetik kuvvetler arasındaki farklar:
1) Elektrik kuvveti, elektrik alanına paralel, manyetik kuvvet ise manyetik alana dik
olarak etkir.[2]
2) Manyetik kuvvet yüklü parçacık hareket halinde iken etki edebilir. Elektriksel
kuvvet ise parçacığın hızına bağlı değildir.[2]
Manyetik kuvvet;
FB = |q|vBsinq
(2)
Manyetik alan ile ilgili daha geniş bilgi [1] ve [2] den bulunur.
4
Tablo 2. Bazı manyetik alan büyüklükleri
MANYETIK ALAN BÜYÜKLÜKLERINE ÖRNEKLER (YAKLAŞIK DEĞERLER)
Manyetik Alan Kaynağı
Alan Büyüklüğü (T)
Kuvvetli bir elektromıknatıs
2T
Süper iletken mıknatıs
30 T
Tıpta kullanılan MR
1,5 T
Çubuk mıknatıs
10-2 T
Güneşin Yüzeyi
10-2 T
Dünyanın yüzeyi
10-4 T
İnsan beyninin içi (sinir atımlarından kaynaklanan)
10-13 T
Yukarıdaki tablo 2’de çeşitli manyetik alan büyüklüklerine örnekler verilmiştir.
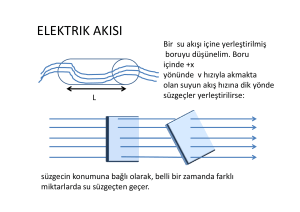
2.2. AMPER YASASI
Alan şiddetinin kapalı çevre boyunca çizgisel integrali bu kapalı çevrenin içinden geçen
akım yoğunluğunun bu kapalı çevreyle tanımlanan yüzey integraline eşittir. Şekil 2’de A
yüzeyinden geçen Ø akısı görülmektedir.[4]
Şekil 2. A yüzeyinden geçen Ø akısı [4]
5
(3)
(4)
(5)
Bir demir parçası üzerine N sarımlı sargıyı saralım sargı içerisinden “i” akımı aksın bu
durumda
büyüklüğüne magnetomotor kuvvet (mmk) adı verilir. Mmk kuvvet akı
yaratma kapasitesidir. [4]
2.3. MANYETİK DİRENÇ
Şekil 3. Magnetomotor kuvvetin eşdeğer devresi[4]
(6)
Manyetik direnç ile elektriksel direnç birbirinden çok farklıdır. Şekil 3’de
magnetomotor kuvvetin eşdeğer devresi görülmektedir. [4]
6
2.4. ENDÜKTANS
(7)
(8)
(9)
Bir sargının endüktansı sargının karesinin akı yolunun direncine bölümünden elde
edilir.
(10)
Bu ifade “l” akı yolunun boyunu “µ0” boşluğun manyetik geçirgenliğini
“µr”
malzemenin bağıl manyetik geçirgenliğini “A” ise akının gördüğü dik kesiti gösterir. [4]
Sistemde hareketli bir öğe varsa sistemin endüktansının zamanla değişken olmasını
bekleriz.[4]
Hareketli öğe sabit öğeden uzaklaştıkça hava aralığı büyür, hava aralığı büyüdükçe
manyetik direnç büyür, sonuçta endüktans küçülür.[4]
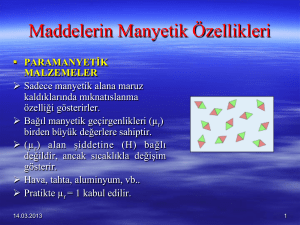
2.5. BAĞIL MANYETİK GEÇİRGENLİK
Herhangi bir malzemenin manyetik geçirgenliğini ölçelim bu ölçtüğümüz değeri
boşluğun manyetik geçirgenliği µ0 =4.π.10-7 H/m ‘ye bölelim. Böylelikle bağıl manyetik
geçirgenliği elde etmiş oluruz.[3]
µr=
(11)
µr˂1 Dia manyetik malzeme
µr˃1 Para manyetik malzeme
µr˃˃˃ 1 Ferro manyetik malzeme
7
Ferro manyetik malzemelerin dirençleri çok küçüktür. Bu nedenle elektrik
makinelerinde Ferro manyetik malzemeler kullanılır.[3]
2.6. KAÇAK AKI
Yolunu hava aralığı üzerinden tamamlayan akıya “ f” faydalı akı adı verilir.
Yolunu hava aralığı üzerinden tamamlamayan akıya kaçak akı adı verilir. “
k”
ile
gösterilir.[4]
Bir sargının toplam akısı kaçak akıyla faydalı akının toplamına eşittir. Sistemde %5
civarından kaçak akı bulunur. Kısa devre durumunda akıyı sınırlayan eleman kaçak akının
reaktansı olur.[4]
2.7. AKI SAPMASI
Akı yolunu hava aralığı üzerinden tamamlarken bir miktar şişmeye uğrar bu olaya akı
sapması adı verilir.[4]
2.8. GİRDAP AKIMI KAYIPLARI
Saç levhalardan oluşturulmuş bir malzemenin üzerine sargının sarılsın. Malzeme
yüksekliği “a” olsun ve “n” adet saç levhadan oluşsun. Bu saç levhadan geçen akı;
(12)
Girdap akımı kaybı;
(13)
Girdap akımı kayıplarını azaltmak için aşağıdaki önlemler alınır;
1-) Malzemeyi ince saç levhalardan oluşturmak,
2-) Malzeme içerisinde silisyum %2-%3 katılarak malzemenin (q) özgül direnci büyütülür
yani kayıpları azaltılır.[3]
8
2.9. MEKANİK DENKLEMLERİN YAZILMASI
Mekanik sistemler hareket biçimine göre ikiye ayrılır;
1-Doğrusal Sistemler
2-Dönmeli Sistemler
Devinim denklemi;
(14)
2.10.AÇMA KAPAMA OLAYLARI
Hareketli öğenin hareketi 3 farklı şekilde olabilir.
1- Hareketi çok hızlı olması durumu
2- Hareketin çok yavaş olması durumu
3- Hareketin ne o kadar hızlı nede o kadar yavaş olması durumu
2.10.1.Hareketin Çok Hızlı Olması Durumu
Bu durumda akının sabit olduğunu düşünürüz. Şekil 4’te hareketin çok hızlı olması
durumunda akı-akım grafiği görülmektedir.
Şekil 4. Hareketin çok hızlı olması durumunda akı-akım grafiği[4]
9
2.10.2. Hareketin Çok Yavaş Olması Durumu
Bu durumda akımın sabit olduğunu düşünürüz. Şekil 5’de bu durum görülmektedir.
Şekil 5. Hareketin çok yavaş olması durumunda akı-akım grafiği[4]
2.10.3. Hareketin Ne Hızlı Ne de Yavaş Olması Durumu
Şekil 6’da hareketin ne hızlı ne de yavaş olması durumunda akı-akım grafiği
görülmektedir.
Şekil 6. Hareketin ne hızlı ne de yavaş olması durumunda akı-akım
grafiği[4]
Açma kapama olayları ile ilgili daha geniş bilgiler [4] de bulunmaktadır.
10
2.11. KESİT HESAPLAMA
Manyetik alan oluşturmak için sarılan bakırın, alınacak güç için belirli bir hesabı
bulunmaktadır. Bu hesaba kesit hesabı adı verilir.
Lenz kanununa göre bir iletkende indüklenen elektromotor kuvvet (EMK) saniyede
kesilen kuvvet çizgisi sayısı ile orantılıdır. Kesme hızı ne kadar fazla ise indüklenen EMK’
da o kadar büyük olur.
2.12. AMORTİSÖR ÇEŞİTLERİ
1-ELEKTRO-DİNAMİK SÜSPANSİYON
2-ELEKTRO-MANYETİK SÜSPANSİYON
2.12.1. ELEKTRO-DİNAMİK SÜSPANSİYON
- Aynı iki kutbun birbirini itme prensibine dayanarak tasarlanmış amortisör çeşitleridir.
- Kutuplaşmada zorluklar yaşandığı için ve kayıpları çok olduğundan bu yöntem pek
kullanılmamaktadır. Şekil 7’de elektro-dinamik süspansiyon görülmektedir.[5]
Şekil 7. Elektro-dinamik süspansiyon[5]
11
2.12.2. ELEKTRO-MANYETİK SÜSPANSİYON
- Farklı iki kutbun birbirini çekme prensibine dayanarak tasarlanmış amortisör çeşididir.
- Elektro-dinamik süspansiyona göre daha kararlı bir çalışma yapısına sahiptir.
- Elektro-dinamik süspansiyona göre daha fazla ağırlık kaldırma kuvvetine sahiptir.[5]
Şekil 8’de elektro-manyetik süspansiyon görülmektedir.
Şekil 8. Elektro-manyetik süspansiyon [5]
Manyetik süspansiyonlarla ilgili daha geniş bilgi [5] ten elde edilebilir.
2.13. MANYETİK AMORTİSÖRLERİN BU AMORTİSÖRLERE GÖRE FARKI
Anlattığımız iki süspansiyonda da hem hareketli ve hareketsiz tarafa sargı koymak
gerekir. Bu hem fazla maliyet hem de fazladan ağırlıktır.
Yapacağımız projede ise hem hareketli ve hareketsiz tarafa sargılı çekirdek koymak
yerine hareketsiz parçaya sargılı çekirdek koyarak, hareketli parçaya da akı yolunu
tamamlayacak ufak bir silisyum paket koymak hem maliyeti hem de ağırlığı azaltacaktır.
12
2.14. PROJEMİZİN BENZER KONULARI VE FARKLILIĞI
Manyetik levitasyon manyetik olarak havada tutma, yükselme anlamına gelir. Yani
manyetik alan kullanarak bir cismi havada asılı tutmadır. Basit manyetik levitasyon
devreleri ile günlük hayatta karşılaşırız. Ama ağırlık kaldırabilecek kadar elverişli
değildirler.
Gerçek hayatta bunun en güzel örneği Mag-Lev trenleridir. Bu trenler arada hiçbir parça
olmadan manyetik alanın etkisi ile havada kalırlar. Ve saatte 500 km kadar hızlara
çıkabilirler. Şekil 9’da Japonya’ da bulunan Mag-Lev treni görülmektedir.
Şekil 9. Japonya’da bulunan Mag-Lev treni [7]
Projemize benzeyen bir diğer konu ise manyetik yatak adı verilen sistemdir. Bu
sistemde motorda bulunan rulmanın yerine manyetik alan vasıtası ile temassız yataklamayı
sağlayan elektromanyetik elemanlardır.
Teknolojideki gelişmelere bağlı olarak son 30 yılda endüstriyel anlamda
kullanılmaya başlanan manyetik yatak teknolojisi önemli avantajları olan, ekonomik
maliyetinin yüksek olmasından dolayı hali hazırdaki kısıtlı uygulama alanlarının dışında
potansiyel ve stratejik uygulama alanlarının giderek arttığı bir teknolojidir.
Basit olarak rotor üzerine etkiyen elektromanyetik çekme kuvvetini dış kuvvetlere karşı
rotor merkez eksende duracak şekilde kontrol etmek olarak açıklanabilir.
13
Bizim projemizin farklılığı:
Görmüş olduğumuz bu uygulamalarda tam anlamıyla ağırlık kaldırmak ve amortisör
görevi görmesi için özel tasarlanmış bir proje söz konusu olmamıştır. Biz manyetik alan
kuvvetinin büyüklüğünden faydalanarak manyetik amortisörü tasarlamak istiyoruz.
2.15.SENSÖRLER
2.15.1.ALGILAYICI (SENSÖR) NEDİR?
Sistemlerdeki denge için en önemli olan şey geri besleme ve algılamadır. Geri besleme
bazen akım ve gerilim yoluyla yapılabildiği gibi çoğu zaman bir algılamaya gerek vardır.
İşte bu ihtiyacımızı karşılayan alete algılayıcı denir. Algılayıcı yalnız başına yeterli
olmayabilir. Algıladığını büyük bir veriye çevirmesi gerekir. İşte hem algılayıcı hem de
algılanan büyüklüğü akım veya gerilime çeviren sisteme biz sensör adını veririz.[6]
Algılayıcıya tam bir cevap vermek gerekirsek; oluşturduğumuz sistem dışındaki fiziksel
büyüklükleri kontrol etmek için, bu fiziksel büyüklüğü elektriksel büyüklüğe çeviren
cihazdır.[6]
Bir fiziksel büyüklük birden çok tür algılayıcı ile algılanabilir. Örnek verecek olursak,
bir uzaklığı, hem ultrasonik sensör hem de kızılötesi sensör yardımı ile ölçebiliriz.
Dolayısıyla hangi büyüklüğü nasıl algılayabileceğimizi bilmek için sensörün temellerini
iyice anlamamız gerekmektedir.[6]
Algılayıcıların, çıkışındaki değere göre basit veya karmaşık değerleri vardır diyebiliriz.
Daha iyi bir şekilde anlatmak gerekirse,
anahtar basit on-off algılayıcıdır. Fotoğraf
makinesi lensi ise binlerce ışığa duyarlı fototransistörden oluşan karmaşık bir algılayıcıdır.
Sensörler ile ilgili daha ayrıntılı bilgiye [6] dan ulaşılabilir.
14
2.15.2. ALGILAYICI (SENSÖR) ÇEŞİTLERİ
Piyasada çok farklı türde algılayıcı bulunmaktadır. Hepsinin uygulama alanı farklıdır.
Dolayısıyla biz algılayıcıları aktif ve pasif olarak iki grupta ayırabiliriz. Pasif algılayıcılar
hazır olan sinyalleri ölçebilir. Aktif sinyaller ise kendi sinyallerini üretip bu sinyalin dış
ortama tepkisini ölçerler.[6]
2.15.3. KULLANACAĞIMIZ ALGILAYICI (SENSÖR)
Manyetik amortisör sisteminde önemli olan hava aralığıdır. Çünkü hava aralığı arttıkça
endüktans küçülür, direnç büyür. Dolayısıyla hava aralığını olabildiğince küçük ve sabit
tutmamız gerekir. Aynı zamanda normal amortisörlerdeki etki-tepki durumunu ortadan
kaldırmak istediğimiz için her ağırlığa göre aynı konumunda kalmasını istemekteyiz.
Dolayısıyla mesafe algılamamız gerekmektedir. Bu nedenle sensörümüzün tercihi mesafe
sensörü olmuştur.
Mesafe sensörünün birçok türü bulunmaktadır. Ultrasonik, kızılötesi ve lazer sensörler
bunlardan birkaçıdır.
Ultrasonik sensörde yayılan frekansın cisme çarpıp geri dönmesi sonucu ve geri dönüş
süresine göre hesaplayarak mesafe ölçümü yapar. Fakat hem istediğimiz mesafe aralığında
çalışamaması, hem de diğer frekanslardan etkilenmesi nedeni ile kullanamadık.
Lazer sensörler belirli bir hava aralığı tarayarak her aralık için mesafe ölçümü
gerçekleştirir. Fakat fiyatlarının pahalı olmasından dolayı maliyeti artıracağından
tercihimiz olmamıştır.
Kızılötesi sensörler kızılötesi ışık yayan diyod (IRED) ve pozisyon algılayıcı(PSD)
kullanarak ölçüm yapar. İstediğimiz mesafe aralığında çalışması, aynı zamanda fiyatının
ucuz olması nedeni ile kızılötesi sensör tercihimiz olmuştur.
15
2.15.4. SHARP GPY2Y0D805Z0F SENSÖR
Şekil 10. Sharp GPY2Y0D805Z0F sensör
Sharp GPY2Y0D805Z0F sensörü uzaklık ölçümünde kullanılan aktif bir sensördür.
Şekil 10’da Sharp GPY2Y0D805Z0F sensör görülmektedir. Gönderilen kızılötesi ışının
cismin üzerinden yansıyıp, ışığın yoğunluğuna göre uzaklığı verir.
Sharp GPY2Y0D805Z0F sensörünün önünde bir obje yoksa sensör çalışmaz dolayısıyla
sensörün önü boştur. Fakat önüne bir obje konulursa, yansıyan kızılötesi ışın sensör
tarafından algılanır. Şekil 11’de bunun basit bir örneği vardır.
16
Şekil 11. Sharp sensörün çalışma prensibi
Sharp GPY2Y0D805Z0F sensörünün normalde 14 ucu vardır. Fakat piyasada bu hali ile
bulunmaz. Breakout kartı denilen 3 adet ucu bulunan karta monte bir şekilde gelir.
Sensörün çalışma aralığı 0,5 cm ile 5cm arasını algılar. Şekil 12’de ise çıkış uçları net bir
şekilde gösterilmiştir.
Şekil 12. Sharp sensörün giriş ve çıkış uçları
17
2.15.5. NEDEN SHARP GPY2Y0D805Z0F SENSÖR
- Şekil 13’te verilen çalışma aralığı bizim için uygundur.
- Arabirim gerektirmeyen bir breakout kartı vardır.
- Hassasiyet yüksektir.
- Her türlü cismi algılayabilir.
Şekil 13. Sharp sensörün çalışma aralığı ve çalışma voltajı
2.15.6. SENSÖRÜN BAĞLANIŞI:
Sharp'ın GPY2Y0D805Z0F modelinde 3 pin bulunur. 1 numaralı pin, 0 ile 5 Volt arası
değişen analog çıkıştır. 3 nolu pin GND ve 2 nolu pin ise +5 Volt girişidir. Daha stabil bir
ölçüm için +5V ile GND pinleri arasına bir kondansatör yerleştirebilir. GPY2Y0D805Z0F
modelindeki analog çıkış 3,3 Volt ‘un altında çıkış verdiği için, hem 5 Volt hem de 3.3
Volt ile çalışan mikro denetleyicilerde kullanılabilir.
18
3. TASARIM
Tasarımda kullanacağımız parçalar ve özellikleri şunlardır;
3.1. Trafo E Sacı
Şekil 14. Trafo E sacı
Şekil 14’te gözüken trafo saçından 47 tanesini birleştirip paket haline getirerek
hareketsiz kısımdaki bölgesine monte edeceğiz. Kullandığımız trafo saçının boyutları
aşağıdaki şekil 15’de daha net bir şekilde gözükmektedir.
Şekil 15. 60mm’lik trafo sacının boyutlar
19
3.2. Trafo I Sacı
Şekil 16. Trafo I sacı
Şekil 16’da gözüken saçtan 47 tanesini birleştirip paket haline getirerek, hareketli
kısımdaki yerine monte edeceğiz. Kullandığımız trafo saçının boyutları aşağıdaki şekil
17’de daha net bir şekilde gözükmektedir.
Şekil 17. Trafo I sacının boyutları
20
3.3. Hareketsiz Kısım
Şekil 18. Manyetik amortisörün hareketsiz kısmı
Şekil 18’de gözüken manyetik amortisörün hareketsiz kısmıdır. Trafonun E saçı ve
sargılar buraya monte edilecektir. Hareketsiz kısmının boyutları şekil 19’da daha net bir
şekilde gözükmektedir.
Şekil 19. Hareketsiz kısmın boyutlandırılması
21
3.4. Sargılar
Şekil 20. Sargının bulunduğu karkas
- Sargılar 0,8mm Bakır kablodan şekilde görüldüğü gibi plastik karkas üzerine 300
spin(tur) olacak şekilde sarılmıştır.
- Karkasın boyutları ise uzunluğu 40mm genişliği 25mm dir. Şekil 20’de sarılmış olan
karkasın son hali gözükmektedir.
3.5. Hareketli Kısım
Şekil 21. Manyetik amortisörün hareketli kısmı
22
Şekil 21’de manyetik amortisörün hareketli kısmı gözükmektedir. Trafonun I saçı
buraya monte edilecektir. Hareketli kısmın boyutları şekil 22’de daha net bir şekilde
gözükmektedir.
Şekil 22. Manyetik amortisörün hareketli kısmının boyutlandırılması
3.6. Yaylar
Şekil 23. Manyetik amortisörde kullanılan çelik yay
23
Manyetik
amortisörün
en
önemli
parçalarından
biride
yaydır.
Şekil
23’de
kullanacağımız 2 adet 50mm uzunluğunda 16mm çapında çelik yaylardır.
3.7. Projenin Gerçekleşmesi
Projeyi gerçekleştirmeye öncelikle hareketsiz kısma paketlenmiş saçların monte
edilmesi ile başladık. Şekil 24’de gözüktüğü gibi montajını yaparken, epoksi yardımıyla
yapıştırdık.
Şekil 24. Hareketli kısma paket sacların montajı
Daha sonra montajını yaptığımız paket saçların üstüne sargıları yerleştirdik. Hareketli
kısma ise Şekil 25’de gözüktüğü gibi epoksi yardımı ile montajını yaptık.
Şekil 25. Hareketsiz kısmın montajı
24
Hareketli kısım ile hareketsiz kısım arasındaki yaylarında koyduğumuzda projemiz en
son Şekil 26’deki hali aldı.
Şekil 26. Manyetik amortisörün son hali
25
4.DENEYSEL AŞAMA
Sargılara uyguladığımız gerilim V(t), sargılardan geçen akım I(t),sarım sayısına N, hava
aralığı Z(t) dersek ve bu amortisörün kaldıracağı yükün ağırlığına M dersek;
kullanacağımız formüller şöyle oluşmaktadır,
∑F=Fm-Fg
(15)
L=
(16)
(17)
=
(18)
(19)
(20)
(21)
Karkasın üzerindeki spin sayısı 300 turdur, sargılara verdiğimiz gerilim 12V , ve Max
akım 2Adir. Bunun sonucunda deneysel aşamamızın teorik kısımdaki formüller ile birebir
tuttuğunu net bir şekilde gözlemledik.
26
5. SONUÇLAR
Manyetik amortisör en son halini aldığı zaman ilk olarak sistemin enerjisiz ağırlığa
nasıl bir tepki vereceğini ölçtük. Yaklaşık olarak 250 g aralıklarla ağırlığı artırıp hareketli
kısım ile hareketsiz kısım arasındaki uzaklığı ölçtüğümüz zaman tablo 3 ‘deki değerleri
elde ettik. Bu değerleri tabloya koyduğumuz zaman şekil 27’deki gibi enerjisiz durumda
iken ağırlık-uzaklık grafiğini elde ettik.
Tablo 3. Sistemde enerji yok iken ağırlık-uzaklık tablosu
Ağırlık (kg)
0
0,5
0,75
1
1,25
1,5
1,75
2
2,25
2,5
2,75
3
Uzaklık (mm)
0,4
0,42
0,43
0,45
0,46
0,47
0,475
0,48
0,48
0,485
0,49
0,495
3,5
3
Ağırlık (kg)
2,5
2
1,5
1
0,5
0
0,4
0,42
0,43
0,45
0,46
0,47 0,475 0,48
Uzaklık (mm)
Şekil 27. Sistemde enerji yokken ağırlık-uzaklık grafiği
27
0,48 0,485 0,49 0,495
Daha sonra sisteme 12V 2A‘lik adaptörümüz yardımı ile sisteme enerji verdiğimiz
durumda aynı ağırlıklarda elde ettiğimiz değerler tablo 4’de bulunmaktadır. Bu değerlere
göre şekil 28’de grafiğimiz görülmektedir.
Tablo 4. Sistemde enerji varken ağırlık-uzaklık tablosu
Ağırlık (kg)
0
0,5
0,75
1
1,25
1,5
1,75
2
2,25
2,5
2,75
3
Uzaklık (mm)
0,35
0,36
0,365
0,37
0,37
0,375
0,375
0,38
0,38
0,38
0,38
0,38
3,5
3
Ağırlık (kg)
2,5
2
1,5
1
0,5
0
0,35
0,36
0,365
0,37
0,37
0,375 0,375
0,38
Uzaklık (mm)
Şekil 28. Sistemde enerji varken ağırlık-uzaklık grafiği
28
0,38
0,38
0,38
0,38
6. YORUM VE DEĞERLENDİRME
Bu proje daha önce denenmemiş bir şeyi denemek olduğu için gerçekleşip
gerçekleşmediğini, herhangi bir projeyi örnek alarak net bir şekilde söylemek mümkün
değildir. Çünkü projeyi ilk tasarlarken hareketli kısım ile hareketsiz kısım arasında hiçbir
bağlantının olmaması öngörülüyordu. Fakat bu durumun çok zor olduğunu ve bulunan
olanaklar ile bunun gerçekleşmeyeceği fark edilerek hareketli kısım ile hareketsiz kısım
arasına yay yerleştirildi.
Ayrıca hava aralığının çok ufak bir değişimde (0.5mm ve daha büyük ), uyguladığımız
kontrol türlerine rağmen (PID, PLC ve PIC ) kontrolü sağlanamadı. Bunun nedeni ise hava
aralığının çok az bir artışında relüktans değerinin çok artması ve bu sebeple çekilen
enerjinin anında karşılanamamasıdır. Aynı zamanda uygulanan her ağırlığa sistemin aynı
tepkiyi vermesi istendiğinden hava aralığının kontrolü yerine sistemin üzerinde ağırlık olup
olmadığı kontrol edilip, belirli ağırlık aralığında sistemin düzgün çalışması sağlandı. Bu
sonuç ile projenin düzgün çalışması yolunda önemli bir yol kat edilmiş oldu.
29
KAYNAKÇA:
[1]. David J. Griffiths, Elektromanyetik Teori, B. ÜNAL, Third Edition Prentice Hall
International, London, Ekim 2003
[2]. A. AKHUNLAR, Elektromanyetik Alan Teorisi, 2. baskı, İ.T.Ü. Ofset Baskı Atölyesi,
1978
[3]. A. ERGENELİ, Magnetik Alan Teorisi, Yıldız Üniversitesi Yayınları, 1988
[4]. C. GÜRÜNLÜ, Enerji Dönüşümü Notları, Basılmamış, Trabzon, Türkiye, Aralık 2011
[5]. F. C. MOON, Superconducting Levitation: Applications to Bearing & Magnetic
Transportation, 1994
[6]. (2008) O.D.T.Ü. Robot Topluluğu. [Online]. Available:
http://www.robot.metu.edu.tr/dosya/sensor
[7]. (2012) The wikipedia website. [Online]. Available:
http://en.wikipedia.org/wiki/Transrapid
30
EKLER
EK 1
STANDARTLAR VE KISITLAR FORMU
1.Projenizin tasarım boyutu nedir? Açıklayınız.
Projemizin tasarım boyutları
Hareketli parça: 310mm*60mm*170mm
Hareketsiz parça: 260mm*200mm*60mm
Büyük paket silisyumlu paket levhalar: 60mm*26mm*40mm
Küçük paket silisyumlu paket levhalar: 60mm*26mm*10mm
2.Projenizde bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Projemizi bütün malzemesinin silisyumlu saçtan yapmaya düşündük. Fakat silisyumlu
saçların çok pahalı ve istediğimiz şekilde yaptırmamız aşırı zor olduğu için sadece akı
yolunun geçeceği yerin silisyumlu saçtan yapılmasına karar verdik.
Aynı zamanda hava aralığının sabit kalması için hava aralığını ölçmek yerine sistemde
ağırlık olmadığını ölçüp buna göre sisteme enerji verdik.
3.Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız?
Manyetik alan teorisi, Enerji Dönüşümü derslerindeki bilgi ve becerilerimizi uyguladık.
4.Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
Proje daha önce yapılmadığından dolayı sadece trafoda kablo kesit hesapları ve
silisyumlu saçlarla ilgili standartları uygulayabildik.
5.Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir?
a-) Ekonomi:
Bütün hareketli ve hareketsiz aksamı silisyumlu saçtan yaptırmak maliyeti ciddi oranda
artıracağından dolayı sadece akım yolunun olacağı yerleri silisyumlu saçtan yapmaya karar
verdik.
31
b-) Çevre sorunları:
Projemizde kullanacağımız manyetik alan çok aşırı bir büyüklükte olmamakla beraber
manyetik bir zararlılık söz konusu olabilir. Bunun yanında kullanacağımız demir aksamın
mekanik ömrünü tüketmesi durumunda yenilenebilir bir ürün olması bizim için bir
avantajdır.
c-) Sürdürülebilirlik:
Mevcut amortisörlerin kısa ömürlü ve pahalı olması başka alternatif çözümlere
yöneltmiştir.
d-) Üretilebilirlik:
Amortisöre alternatif bir tercih olduğundan gelecek yıllarda otomotiv sektörü başta
olmak üzere çoğu uygulamada kullanmak üzere üretime geçmesini istemekteyiz.
e-) Etik:
Manyetik amortisör projesi tamamen mühendislik etiğine uygun olarak düşünülmüş ve
araştırması buna göre yapılmıştır. Herhangi bir projenin devamı olmamakla beraber kendi
farklılıklarını ortaya bariz bir şekilde koymaktadır.
f-) Sağlık:
Herhangi bir sağlık sorunu bulunmamaktadır.
g-) Güvenlik:
İnsanı tehdit edecek bir gerilimde çalışmadığından dolayı yüksek güvenlik önlemlerine
gerek yoktur. Fakat her türlü güvenlik alınmıştır. Sensör bağlantı devreleri ve giriş
devrelerinin kabloları dışarıda bırakılmamıştır.
h-) Sosyal ve politik sorunlar:
Herhangi bir politik sorunun başlangıcı veya bitişi değildir.
32
EK 2
MALİYET TABLOSU
TOPLAM
MALZEME
MİKTARI BİRİM FİYATI (TL) FİYAT(TL)
HAREKETLİ KISMIN PARÇASI
1 ADET
30 TL
30 TL
HAREKETSİZ KISMIN PARÇASI
1 ADET
30 TL
30 TL
60MM LİK TRAFO SACI (PAKET)
2 ADET
20 TL
40 TL
0.80 MM'LİK EMAYELİ BAKIR KABLO
10 METRE 2 TL
20 TL
SHARP GPY2Y0D805Z0F MODEL SENSÖR
1 ADET
20 TL
20 TL
SHARP BREAKOUT MONTE KARTI
1ADET
10 TL
10 TL
RÖLE KARTI(*)
1ADET
20 TL
20 TL
220VAC/12VDC 2A ADAPTÖR
1 ADET
30 TL
30 TL
BAĞLANTI KABLOLARI
5 ADET
0,50 TL
2,50 TL
TOPLAM(TL)
203 TL
(*)= RÖLE KARTININ TASARIMI VE YAPIMI BİZE AİT OLUP TOPLAM MALİYETİDİR.
33
ÖZGEÇMİŞ
210340 TOLGA YASAN:
1990 yılı Trabzon doğumludur. İlköğrenimini Cudibey İlköğretim Okulu’nda,
ortaokulu Cumhuriyet Ortaokulu’nda, liseyi ise Trabzon Lisesinde okumuştur. 2008
yılında Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik
Mühendisliğini kazanmış ve halen burada okumaktadır.
210396 MURAT ŞEN:
1989 yılı Kütahya doğumludur. İlköğrenim ve Ortaöğrenimini Cumhuriyet ilkokulunda,
liseyi Kütahya Anadolu Öğretmen Lisesinde tamamlamıştır. 2008 yılında Karadeniz
Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliğini kazanmış
ve halen burada okumaktadır. 1997-2002 yılları arasında Türkiye Yüzme Federasyonunda
milli sporcu olarak bulunmuş ve bu alanda birçok ödül kazanmıştır.
34