5. Uluslararası İleri Teknolojiler Sempozyumu (İATS’09), 13-15 Mayıs 2009, Karabük, Türkiye
AĞLARIN EĞİTİMİ VE ARAŞTIRILMASI İÇİN DEVS TABANLI SİMÜLATÖR
TASARIMI VE UYGULAMASI
DESIGN AND APPLICATION OF A DEVS-BASED SIMULATOR FOR
NETWORK EDUCATION AND RESEARCH
Ahmet ZENGİN, Hüseyin EKİZ, Bülent ÇOBANOĞLU ve Sinan TUNCEL
Sakarya Üniversitesi Teknik Eğitim Fakültesi Elektronik ve Bilgisayar Eğitimi Bölümü, Sakarya, TÜRKİYE.
{azengin, ekiz, bcobanoglu ve stuncel}@sakarya.edu.tr
Özet
Bilgisayar ağları günümüzde hemen hemen her alanda
yaygın olarak kullanılmaktadır. Devlet kamu hizmetlerinden
eğlence ve sohbet ağlarına kadar her sektör ağ
sistemlerini hizmet ve faaliyet alanı olarak benimseyerek,
bir şekilde sanal alemde yer edinmişlerdir. Ağ sistemleri bu
kadar hayatımıza girmişken, bu sistemlerin ve teknolojinin
henüz yeterince eğitim altyapısı oluşmamıştır. Özellikle
eksiklik, teorik kavramların yerleşmesine kaktı sağlayacak
eğitim
ve
araştırma
araçlarının
yetersizliğinden,
anlaşılmazlığından, kullanım / gelişim zorluğundan ve açık
kaynak kodlu olmayışından kaynaklanmaktadır.
Bu çalışmada, yukarıda ifade edilen problemleri ortadan
kaldırmaya yönelik olarak, eğitim ve araştırma amaçlı
kullanılabilecek bir ağ simülatörü geliştirilmiştir. Simülatör
ayrık olaylı modelleme ve simülasyon yöntemi (DEVS)
kullanılarak DEVSJAVA ortamında geliştirilmiştir.
Anahtar kelimeler: Eğitim Simülatörü, Modelleme ve
Simülasyon, DEVS, İnternet.
Abstract
Network systems are used almost all areas in the world.
From public services to entertainment, all sectors are
adopted the internet as a service area. Though this is a
fact, its education approaches are not completely well
defined and provided. These deficiencies are lack of tools
of education and methodology, difficulty of their design and
lack of open source software.
In this work, in order to meet above problems, a opensource, modular and easy to use network simulator are
designed which can be used for network education and
research. Simulator itself contains the technologies such
as Java, DEVS and agent based modeling, and
implemented in DEVSJAVA modeling and simulation
environment.
.
Keywords: Educational simulator,
simulation (M&S), DEVS, Internet.
Modeling
and
1. Giriş
Bilgisayar ağları günümüzde hemen hemen her alanda
yaygın olarak kullanılmaktadır. Devlet kamu hizmetlerinden
basit eğlence ve sohbet ağlarına kadar her sektör ağ
sistemlerini hizmet ve faaliyet alanı olarak benimseyerek,
bir şekilde sanal alemde yer edinmişlerdir. Ağ hızında ve
© IATS’09, Karabük Üniversitesi, Karabük, Türkiye
işlem yapma gücündeki hızlı artış gereksinimi, ağ
içerisinde gerçekleştirilen yönlendirme ve yönetim
işlemlerinin, merkezi bir yapıdan dağıtık bir yapıya doğru
kaymasını zorunlu kılmaktadır. Performans / maliyet
oranının göz önünde tutulması zorunluluğu, araştırmacıları
ağ üzerinde yeni işlem kapasitelerinin eklenmesi ve yeni
yöntemlerin
tasarlanması
konusuna
daha
fazla
yöneltmektedir. Bu yönelim, nesneye yönelik teknolojilerle
birlikte yazılım endüstrisinde yoğunlaşmakta ve yazılım
endüstrisindeki yoğunlaşma sonucunda nesneye yönelik
eğilim birbirleri ile etkileşen yazılım bileşenlerinin
modellenmesi ve tasarlanması yaygın bilinen konular
olarak ortaya çıkmaktadır.
Ağ sistemleri bu kadar hayatımıza girmişken, bu
sistemlerin ve teknolojinin henüz yeterince eğitim altyapısı
oluşmamıştır. Özellikle eksiklik, teorik kavramların
yerleşmesine kaktı sağlayacak eğitim ve araştırma
araçlarının yetersizliğinden, anlaşılmazlığından, kullanım /
gelişim zorluğundan ve açık kaynak kodlu olmayışından
kaynaklanmaktadır. Bunun yanında, İnternetin yakın
gelecekte 1 milyar düğüme erişeceği düşünülürse,
ölçeklenebilirlik kavramının ağların modellenmesinde ve
simülasyonunda yeni boyutlar kazanacağı açıktır. Statik
topoloji üreten simülatörler (COMNET, NS2, OPNET, vb.)
küçük ağları çalışmak için ideal platformlarken,
günümüzde üstel olarak artan ağ sistemlerini modellemede
ve değişken yapılı ağ sistemlerinin performansını test
etmede yetersiz kalmaktadırlar. Ayrıca, bu simülatörlerin
mimarilerinin birçoğu soyutlama ve hiyerarşiden yoksun
olmaları yanında çok büyük hesaplama maliyeti
oluşturmaktadırlar [1,2,3]. Yapılan çalışmada, belirtilen
kısıtlamaları / sakıncaları ortadan kaldırmaya yönelik
olarak DEVS (Discrete Event System Specification)
metodolojisi kullanılarak bir ağ simülatörü geliştirilmiştir [4].
Tasarlanan ağ sisteminin modeli; ağ bileşenlerinin
tanımlanmasını, bu bileşenlerde çalışacak yazılım
nesnelerinin, etkileşimlerinin ve bu varlıkların işlem yapan
düğümlere dağıtılmalarını, ağ topolojilerinin ve iletişim
protokollerinin tanımlanmasını içermektedir. Düğümler ve
bağlantı elemanları temel ağ bileşenleri olarak
tanımlandıktan sonra, DEVS birleşik model tanımı
kullanılarak temel bileşenler birbirine bağlanıp birleşik ağ
modelleri oluşturulmuştur. Geliştirilen ağ ortamı farklı
yönlendirme algoritmalarını (en kısa yol, uzaklık vektörü,
oğul zekası, vb.) modelleyebilme yeteneğine sahiptir.
Geliştirilen simülatörün eğitim amaçlı kullanılması
örneklendirilmiş ve bu çerçevede Açık En Kısa Yol İlk
(Open Shortest Path First – OSPF) algoritması
modellenmiştir. Modellenen ağ, farklı trafik yükleri altında
Zengin, A., Ekiz, H.,Çobanoğlu, B. ve Tuncel, S.
çalıştırılarak, çalışma sırasında geliştirilen yönlendirme
algoritmasının performansı incelenmiştir. Gerçekleştirilen
uygulamalardan, geliştirilen simülatörün son derece
paralel, esnek ve hızlı çalıştığını, değişik teknolojileri
barındıran uygulamaları geliştirebilme yeteneğine sahip
olduğu ve nihayetinde sağlam bir eğitim aracı olduğu
gözlemlenmiştir.
Bu çalışmada, 2. Bölümde Java teknolojisi, DEVS ve
gezgin görevli yaklaşımı, 3. Bölümde DEVS tabanlı
simülatörün gelişim evreleri, 4. Bölümde simülasyon
deneyleri ve 5. Bölümde sonuçlar ve öneriler
özetlenmektedir.
2. Yararlanılan Teknolojiler
Bu bölümde, dağıtık ve paralel bir şekilde çalışan bir ağ
sisteminin temel ve birleşik parçalarının geliştirildiği
teknolojiler açıklanacaktır. Tüm modeller Java dili
kullanılarak ve DEVS yaklaşım/formalizmine uygun olarak
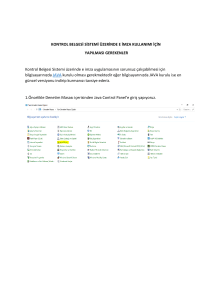
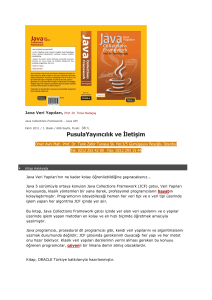
hiyerarşik ve modüler bir tarzda geliştirilmiştir. Sağlam bir
hiyerarşi model ve/veya modüllerin arasında sıkı bir ilişki
tesis ederken, modülerlik yazılımın hata bulma ve giderme,
yeniden kullanılabilirlik, karşılıklı çalışılabilirlik gibi yönetim
işlevlerinin kolayca gerçekleştirilmesini olanaklı kılar
(Şekil 1).
2.1. Java teknolojisi
Java, taşınabilir uygulamalar ve appletler gibi bir takım
kolaylıklarla yazılımcılara heyecan vermiştir [5]. Gerçekte,
Java üç farklı taşınabilirlik sunar: Kaynak kodu
taşınabilirliği, CPU mimarisi taşınabilirliği ve OS/GUI
taşınabilirliği. Bu taşınabilirlik türlerini sağlayan paketler;
Java programlama dili, Java sanal mekanizması (JVM) ve
dil ile ilişkili sınıf kütüphaneleridir. Java programlama dili
en alışık olduğumuz taşınabilirliği sağlar: kaynak kodu
taşınabilirliği. Belirli bir Java programı, temel CPU, işletim
sistemi veya Java derleyicisi dikkate alınmaksızın aynı
sonuçları üretmelidir. JVM CPU mimarisi taşınabilirliğini
sağlar. Java derleyicisi, JVM için nesne kodunu (J-code)
üretir ve belirli bir CPU üzerinde JVM ilgili CPU için Jkodunu derler. OS/GUI taşınabilirliğini tesis etmek için,
Java sanal OS ve GUI için bir takım paketler (awt, util ve
lang) sağlar.
Java programlama dili nesneye yönelik olguyu benimser
ve dağıtık uygulamaların geliştirilmesi için araçlar sağlar.
Bu çalışmada ağ sistemleri Java teknolojisi kullanılarak
modellendi ve test edildi. Karmaşık sistemler, hesaplama
için daha büyük kaynaklara ihtiyaç duyacağından,
geliştirilen bileşenlerin artan Java performansından
faydalanacak olması bir avantajdır. Java çalışma anı
performansının arttırmak aktif bir araştırma alanıdır.
2.2. Ayrık Olaylı Sistem Tanımlama Formalizmi (DEVS)
DEVS(Discrete Event System Specification) modelleme
yaklaşımı, ayrık olaylı modelleme ve simülasyonda temel
bir yaklaşım olarak Zeigler tarafından ortaya atılmıştır [6].
DEVS yaklaşımının sadece ayrık olaylı modeller için değil,
ayrık zamanlı ve diferansiyel denklemli sistemlerle ifade
edilen davranışları uyarlamak için bir hesaplama temeli
meydana getirmesi nedeni ile, modelleme ve simülasyon
uygulamalarında DEVS teorisinin gücünü görmek
önemlidir. Ayrık olaylı yaklaşımlar sınıfı içinde modeller,
zamanın sürekli olduğu ancak sınırlı bir zaman
periyodunda sonlu sayıda olayın meydana geldiği bir
soyutlama seviyesinde tanımlanır [7]. Bu olaylar sistemin
durum değiştirmesine neden olabilir. Olaylar arasında
sistemin durumu kesinlikle değişmez. Bu nedenler Ayrık
sistemler, sistemin durumunun zaman içerisinde sürekli
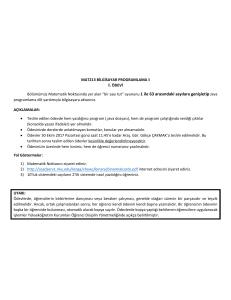
değiştiği sürekli modellerden bu noktada farklıdır. Şekil
2’de, modelleme ve simülasyon kavramlarının birbiriyle
ilişkisi görülmektedir.
DEVS bir sistemin davranışını iki farklı seviyede ele alır:
atomik ve birleşik. Atomik DEVS; en düşük seviyede, sıralı
durumlar arasındaki geçişler gibi ayrık olaylı sistemin
otonom davranışını, harici bir girişe (olaylar) nasıl tepki
verdiğini ve çıkışı (olaylar) nasıl hesapladığını tanımlar.
Birleşik DEVS; daha yüksek bir düzeyde, bir sistemi
bileşenler ağı olarak tarif eder. Bileşenler, atomik DEVS
modelleri ve birleşik DEVS modelleri olabilir. Bağlantılar,
bileşenlerin birbirini nasıl etkilediğini gösterir.
GERÇEKLİK
MODEL
Gerçek-Dünya
Varlığı
(nesne)
Temel
Model
HEDEFLER
sadece deneysel ortamdaki
davranışın çalışılması
Model
Sistem (S)
Model
Model (M)
ortam ile deney
yapılması
Model
Deney
esnasında
Gözlenen Veri
Model
Model
Model
Model
Şekil 1. Hiyerarşik ve modüler bir tasarımının alt
bileşenlere ayrılması.
geçerleme
Model hakkında
temel ön bilgi
Modelin simüle edilmesi =
sanal deney
Simülasyon
Sonuçları
Modelleme ve
Simülasyon
Süreci
Şekil 2. M&S kavramları ve birbirleriyle ilişkileri.
Paralel bir atomik DEVS modeli aşağıdaki yapıdadır:
M=<X, S, Y, δint, δext, δconf, λ, ta>
Burada;
X, giriş değerleri kümesi,
S, durumlar kümesi,
Y, çıkış değerleri kümesi,
δint : S→S dahili geçiş fonksiyonu,
Zengin, A., Ekiz, H.,Çobanoğlu, B. ve Tuncel, S.
δext : Q x X→S harici geçiş fonksiyonu,
burada; Q = {(s,e)|s ∈ S, 0≤ e≤ta(s) toplam
durum kümesi,
e, en son olan geçişten bu yana geçen
süredir.
δext : Q x X→S çakışma (confluent) geçiş
fonksiyonu,
λ: S→Y çıkış fonksiyonu,
ta: S→R+0,∞ zaman ilerleme (time advance)
fonksiyonu, 0 ve ∞ arasındaki pozitif reel sayılar
kümesidir.
görevliler bir problemi çözmek için ortak bir çaba
gösterirler. Bu yöntem, büyük sistemin sadece küçük
parçalara bölündüğü anlamına gelmez. Bu yöntemde, her
biri problemin belirli bir yönüne odaklanabilen birkaç
uygulama bir iletişim sistemiyle birlikte bağlanarak, bakış
açılarının karşılıklı değişilmesini sağlarlar. Problemin
çözümüne yönelik olarak sonuçları toplamak, ilerleme
stratejileriyle birlikte gündeme gelir. Bu problem çözme
tekniği ‘dağıtık problem çözümü’ olarak adlandırılır ve
işbirliği yapan sistemlerin her biri ‘görevli’ (agent) olarak
adlandırılır [10].
2.3. Gezgin görevliler
3. DEVS Tabanlı Simülatör Tasarım Süreci
Günümüzün iletişim ortamlarında heterojen ağların
kullanımına doğru artan eğilim, ağ operatörlerinin daha
kapsamlı bir bilgiye ve daha iyi bir eğitime sahip olmalarını
gerektirmektedir [8]. Farklı ağların yönetimi, büyük boyutta
verinin ağdan toplanmasını ve yönetim aktivitesine
başlanmadan önce verinin analiz edilmesi gereksinimini
ortaya çıkarmaktadır. Diğer taraftan, günümüz ağ ve
internet kullanıcılarının artan bir güvenilirlik ve hizmet
kalitesi gereksinimine ve beklentisine sahip olmaları, bu
gereksinimleri ve beklentileri karşılayacak olan ‘yazılım
görevlileri’ (software agents) konusunun gelişimine bir etki
/ katkı yapmaktadır [9].
Paralel ve dağıtık çalışan bir ağ sistemini modelleme
amacına yönelik oluşturulan bağlantı elemanları, bu
bağlantılar aracılığıyla haberleşen düğümler ve IP
paketleri, ‘temel ağ bileşenleri’ olarak tanımlanmıştır [11].
Tanımlanan düğümler ve bağlantı elemanları ile
ayarlanabilir
kapasiteleri
kullanılarak
çeşitli
ağ
konfigürasyonları ve topolojileri geliştirilebilir. Daha sonra
bu bileşenlerin bir araya gelmesinden oluşan bir ağ modeli
‘DEVS birleşik ağ modeli’ olarak adlandırılır. Burada
kullanılan atomik ve birleşik modeller, ‘Paralel DEVS
yaklaşımı’ kullanılarak tanımlanılır ve ‘DEVSJAVA’
modelleme ve simülasyon ortamında tasarlanılır. Bu
yöntemde, düğümler ve bağlantı elemanlarında tanımlı
dinamikler, ağ modelinin davranışını (çıkış zamanı gibi)
belirlemek için kullanılabilir.
Çoklu görevli sistemlerde, merkezi olarak çalışan ve
sistemin tüm zekasını / işlevini gerçekleştiren çok büyük bir
uygulamanın yerine bir takım küçük sistemler veya
DÜĞÜM
Global Yönlendirme Tablosu
Yönlendirme Tablosu
Yönlendirme
Modülü
DÜĞÜM
Gezgin Görevliler
Global Yönlendirme Tablosu
Yönlendirme Tablosu
route
Yönlendirme
Modülü
route
route
Gelen ve giden paketler için
tamponlar
route
Ağ Arabirimi (NIC)
1… m
Işleme zamanı
Gelen ve giden paketler için
tamponlar
IP Addresi
Alıcı
kuyruğu
Gezgin Görevliler
Gönderici
kuyruğu
Ağ Arabirimi (NIC)
1… m
Işleme zamanı
IP Addresi
Band genişliği
Alıcı
kuyruğu
Gönderici
kuyruğu
Band genişliği
Duplex Link Model
Link 1
in
Queue
out
Dela
Link 2
Queue
Dela
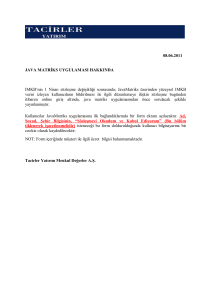
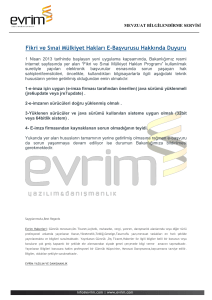
Şekil 3. Düğümlerin bir bağlantı elemanı aracılığıyla birbirine bağlanması
Bir ağ topolojisi, düğümler (bilgisayar, yönlendirici, vb.) ve
bağlantı elemanlarından oluşur (Şekil 3). Düğümler, ağ
üzerinde dolaşan varlıklar / gözcüler / gezgin görevliler için
bir hesaplama altyapısı oluşturması yanında diğer
düğümlerle mesajlaşma ve veri trafiği için bir takım
arabirimlere ve araçlara sahiptir. Diğer düğümlere bağlantı
elemanları kullanılarak bağlanan bir düğüm, ağın yapısına
göre değişik modlarda çalışabilir (yönlendirici, dağıtıcı vb.).
Dağıtıcı (hub) modunda çalışan bir düğüme bir bağlantı
elemanı üzerinden gelen paketler, diğer bağlantı
elemanları üzerinden dağıtılır. Düğümün yönlendirici
(router) modunda çalışması durumunda, paket adres bilgisi
bir yönlendirme kararı verebilmek için kullanılır ve bu
bilgiye göre paket belirli bir bağlantı elemanı üzerinden ilgili
adrese gönderilir. Ağı oluşturan diğer bileşenler olan
bağlantı elemanları ise ağdaki anahtarlama elemanları
arasında bir haberleşme yolu sağlar.
Zengin, A., Ekiz, H.,Çobanoğlu, B. ve Tuncel, S.
Yapılan çalışmada geliştirilen modellerle simülasyon
deneyleri gerçekleştirmek için, bir modelin deney
yapılacağı ve gözlemleneceği şartları tanımlayan ‘DEVS
deneysel çerçeve’ kavramından faydalanıldı [7]. Tipik bir
deneysel çerçeve bir üreteç ve dönüştürücüden oluşur. Ağ
trafiğini üretmek ve bağlantı elemanı, düğüm, vb. ağ
bileşenlerinin arızalanmaları ve hizmet verememeleri gibi
ağın çalışması sırasında meydana gelebilecek olayları
önceden programlamak ve zamanlamak maksadıyla bir
‘olay üreteci’ kullanıldı. Bu işlemleri gerçekleştirmek için
üreteç ağdaki ilgili bileşenlere DEVS mesajları gönderir.
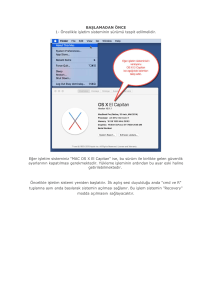
Şekil 4’te basit bir ağın ekran çıktısı verilmektedir.
3. Adım: her düğüm daha sonra Dijkstra algoritmasına
göre en kısa yolları hesaplarlar [12].
4.2. Simülasyon sonuçları
Yukarıda açıklanan OSPF uygulaması belirli bir trafik yükü
altında çalıştırılmış ve sonuçlar grafikler halinde
sunulmuştur. Geliştirilen örnek uygulamalarda yapılan
deneylerde gerçek dünya şartları tesis edilmeye
çalışılmıştır ve bütün bileşenlerin parametreleri gerçek
dünyaya uygun olarak seçilmiştir. Bununla birlikte, değişik
senaryoları uygulamak amacıyla ağın davranışını etkileyen
simülasyon parametreleri simülasyon çalışmasından önce
esnek bir şekilde ve kolayca ayarlanabilir.
Şekil 4. Bir ağın DEVSJAVA görüntüsü
Her düğüm, içinde ağdaki muhtemel her bir hedef
düğümün temsil edildiği bir yönlendirme tablosuna sahiptir.
Bu yönlendirme tablosu komşu düğümlerin sütunları,
kendisi hariç hedef düğümlerin ise satırları temsil ettiği bir
matris olarak düşünülebilir (yani satırlar hedeflere,
sütunlarda komşulara karşılık düşer) (Şekil 5.c).
Yönlendirme tablosunun boyutu ilgili düğümün komşuları
ve düğümün kendisi hariç ağdaki hedef düğümlerin
çarpımı kadar olsa da, bizim uygulamamızda yönlendirme
tablosunun boyutu düğümün keşfedebildiği düğüm ve
komşu sayısı ile ilişkilidir. Her bir düğümü bir yönlendirme
tablosuyla donatarak veri paketleri sistematik olarak ağ
boyunca yönlendirilebilir. Bir düğüm bir paketi belirli bir
hedefe doğru göndermeye ihtiyaç duyduğunda, hangi gidiş
bağlantı elemanının (veya DEVS atomik model çıkış portu)
kullanılacağı kararı yönlendirme tablosunda belirtilen
bilgiye dayanılarak verilir. Yönlendirme tablolarının görsel
olarak takip edilebilmesi, geliştirilen simülatörün eğitim
amaçlı kullanılmasında son derece büyük öneme sahiptir.
(a)
(b)
4. Örnek Uygulama
Bu bölümde, yukarıdaki bölümlerde temelleri anlatılan
simülatör üzerinde bir örnek çalışma gerçekleştirilmiştir.
Örnek çalışma, OSPF protokolünün çalışmasının eğitimine
yönelik olarak tasarlanmıştır.
4.1. OSPF protokolü
OSPF protokolü bağlantı durumu algoritmasının en yaygın
kullanılan örneklerinden biridir [8]. Kısaca üç adımda
çalışır.
1. Adım: her düğüm başlangıçta kurulum safhasındadır. Bu
aşamada birbirlerini tanımak için “hello” paketleri
gönderirler. Şekil 5.a’da bu aşama görülmektedir.
2. Adım: her düğüm belirli bir zaman aralığında yada olay
tetiklemeli olarak birbirine “bağlantı durumu ilanı- LSA”
paketlerini gönderirler (Şekil 5.b).
(c)
Şekil 5. OSPF protokolünün çalışmasının görsel takibi.
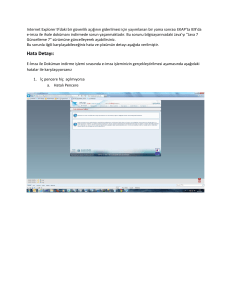
Şekil 6’da, ağ çıkışı 1 ms gibi bir sürede en yüksek
değerini almakta ve simülasyon sonuçlanana kadar
ortalama değerini korumaktadır. Ağ çıkışına hızlı bir
Zengin, A., Ekiz, H.,Çobanoğlu, B. ve Tuncel, S.
şekilde ulaşılması ve çıkışın çalışma boyunca sabit
kalması, OSPF algoritmasının yük dengeleme davranışının
göstergesidir. Bununla birlikte, düğümlerin sınırlı sayıda
bağlantı elemanı kullanılarak birbirine bağlı olmasına ve
ağır trafik şartlarına rağmen OSPF uygulamasında
herhangi bir paket kaybı yaşanmamaktadır. Aşırı trafik
artışlarına sistem hızlı cevap verdiğinden dolayı ağ
çıkışında aşırı dalgalanmalar görülmemektedir.
Bu grafikte toplam yük değeri hiçbir zaman aşırı değerler
almamakta, yükün artma eğilimi gösterdiği durumlara ağ
gecikmeden cevap vermekte ve yük değişiminin belirli bir
aralıkta kalması sağlanmaktadır. Yönlendirme sistemi
yükün artış eğilimine milisaniyeler mertebesinde cevap
vermektedir. Bu sebeple yük değişimi grafiği, inişler ve
çıkışlar şeklindeki bir testere dişini andırmaktadır.
1200
1000
800
Çıkış (KBits/s)
Şekil 8’de, ağ bileşenleri üzerindeki yükün zamanla
değişimi görülmektedir. Ağ yükü birim zamanda ağda
kuyruklarda bekleyen paketlerin sayısı olarak olay
dönüştürücü tarafından hesaplanmaktadır. Kuyruklarda
bekleyen paket sayısının birim zamandaki ağ üzerindeki
toplam yük olarak ele alındığı bu değerlendirmede paket
kayıpları ve kontrol paketleri ihmal edilmektedir.
600
400
5. Sonuçlar ve Değerlendirme
200
0
0
0.2
0.4
0.6
0.8
1
-200
Zam an (s.)
Şekil 6. Ağ içerisinde oluşan trafik çıkışı
Geliştirdiğimiz modelleme ve simülasyon ortamı,
ölçeklenebilir, adaptif ve sağlam ağ uygulamalarının
modellenmesi, tasarımı ve eğitimi için örnek bir çerçeve
olmuştur. Teorik modelleme ve simülasyon bilgisinin
pratiğe
dökülerek
uygulanması,
ağ
sistemlerinin
çalışmasının ve teknolojisinin kavranması ülkemizde son
derece zayıf olan modelleme, simülasyon ve ağ sistemleri
biliminin uygulamalı olarak kavranmasını ve öğrenilmesini
sağlamıştır. Bu çalışma DEVS metodolojisinin geniş bir
alana uygulanabilirliğini desteklemiştir.
Kaynaklar
[1]
[2]
Şekil 7. Ortalama paket gecikmesi.
[3]
[4]
[5]
[6]
[7]
[8]
[9]
Şekil 8. Ağ yükünün zamanla değişimi.
Şekil 7’de, 1 saniye boyunca ağ üzerinden geçen
paketlerin maruz kaldığı ortalama gecikmenin zaman
üzerinde değişim grafiği görülmektedir. Ortalama gecikme;
paket üretecinin paketi ürettiği zaman ile paketin olay
dönüştürücüye vardığı zaman arasındaki fark olarak
hesaplanmaktadır. Şekilden de görülebileceği gibi paketler
için ortalama gecikme 9 ms olarak ölçülmüştür.
Gecikmenin tutarlı ve kabul edilebilir bir seviyede kalması,
ağın tıkanıklıkları yönetebildiğinin bir göstergesidir.
[10]
[11]
[12]
http://www.dei.isep.ipp.pt/docs/arpa.html, History of
ARPANET
D. Bertsekas and R. Gallager. Data Networks,
Prentice-Hall, 1992.
Network Simulator-2, http://www.isi.edu/nsnam/ns/
Bernard P. Zeigler. Theory of Modelling and
Simulation. Robert E. Krieger, Malabar, Florida,
1984.
Java Web Sitesi- www.java.sun.com
B. P. Zeigler, Theory of Modelling and Simulation,
John Wiley, New York, 1976.
Bernard P. Zeigler, Herbert Praehofer, and Tag
Gon Kim. Theory of Modelling and Simulation:
Integrating Discrete Event and Continuous
Complex Dynamic Systems. Academic Press,
second edition, 2000.
Steenstrup, M. E. (Ed.). (1995). Routing in
Communications Network. Prentice-Hall.
Appleby, S. and Steward, S. Mobile software
agents for control in telecommunications Networks.
BT Technology Journal, Vol. 12, No.2. 1994.
Nwana, H. S., Software Agents: An Overview,
Knowledge Engineering Review, vol. 11, no 3,
Sept. 1996, pp.1-40.
Zengin A., Sarjoughian H., Ekiz H., “Biologically
Inspired Discrete Event Network Modeling”,
ESS2004, Budapest / Hungary, 2004.
Dijkstra, E.W. A Note on Two Problems in
Connexion with Graphs In Numerische Mathematik
vol. 1. 1959.