T.C.
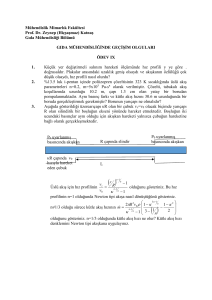
BALIKESİR ÜNİVERSİTESİ
FEN-EDEBİYAT FAKÜLTESİ
GENEL FİZİK
MEKANİK LABORATUVARI
FİZİK BÖLÜMÜ
BALIKESİR
2011-2012
GENEL FİZİK LABORATUVARI
İMZA ÇİZELGESİ
2011-2012
ÖĞRENCİNİN :
ADI SOYADI
:
FAKÜLTE NUMARASI
:
BÖLÜMÜ
:
DENEY
NO
DENEYİN ADI
TARİH
İMZA
DENEY 1: MEKANİK SİSTEMLERE GİRİŞ
A-HOOK KANUNU-KUVVETLERİN ÖLÇÜMÜ
Araçlar
-Deney tahtası
-Yay terazisi
-Kütle asıcısı
-Kütleler
Giriş
Kuvvet kavramı F = ma olarak; Newton’un ikinci kanunuyla ifade edilir. Bu
kanunu kullanarak kütlesi bilinen bir cisim meydana getirdiği ivmeyi ölçerek o cisim
üzerindeki kuvvet tespit edilebilir. Fakat bu yöntem pratik olarak çok nadirdir. Daha
uygun bir diğer yöntem ise ayarlanabilen değerleri belli kuvvetler ile bilinmeyen
kuvvetleri karşılaştırmaktır. Her iki kuvvet bir cisim üzerine uygulandığı zaman ve
aynı zamanda cisim ivmesiz ise bilinmeyen kuvvet hem büyüklük hem de yön olarak
bilinen kuvvete tam olarak ters düşmek zorundadır.
Bu statik sistemler ile kuvvetlerin ölçümü ve uygulanmasıyla ilgili iki yöntem
vardır. Bunlardan birisi ayarlanmış kuvvetleri asmaktır. Kütlesi m olan bir cisim için
yerçekimi kuvveti F = mg olarak bu kütleyi aşağı doğru çeker, burada g yerçekimi
ivmesidir (g = 9.8 m/s2 aşağı doğru, dünyanın merkezine doğru). Yay terazisi
kuvvetlerin uygulanması ve ölçülmesinde ikinci bir yöntem olarak kullanılır. Bu
deneyde yay terazisinin özelliklerini incelemek için ayarlanmış kütleler tarafından
sağlanan bilinen kuvvetleri kullanacaksınız.
Düzenek
Yay terazisini deney tahtasının üzerine asın. Yayın plastik tüple dikey olarak
asılı bulunmasına dikkat ediniz. Yay terazisinde herhangi bir ağırlık olmaksızın, Şekil
1.1.a’da da görüldüğü gibi terazinin santimetre ölçeğinde göstergeyi, 0 cm noktasına
gelene kadar yay terazisinin üzerinde bulunan sıfırlama vidasını ayarlayınız.
Metot
1. Yay terazisinin ucuna 20 gram bir kütle ile birlikte bir kütle asıcısı asınız. Şekil
1.1.b’de görüldüğü gibi santimetre ölçeğinde yayın aldığı yolu ölçünüz. Bu
değeri Tablo 1.1’de uygun bir yere kaydediniz. Toplam kütle içerisinde 5 gr
olan kütle asıcısının kütlesini dikkate alınız.
2. Kütle asıcısına ek kütleler asarak tabloda gösterilen yay terazisine asılı her bir
değer için toplam kütleyi ayarlayınız. Her değer için yayın aldığı yolu
kaydediniz.
3. F = mg formülünü kullanarak kullanılan her kütle değeri için toplam ağırlığı
Newton cinsinden bulunuz. Sonuçlarınızı Tablo 1.1’e yerleştiriniz.
NOT: Kuvvet ölçmek için asılı ağırlıklar kullanılırsa gram terimi genel olarak bir ağırlık
birimiymiş gibi kullanılır. Ağırlık ile kütle arasındaki fark iyi anlaşıldığı sürece bu
kullanımda herhangi bir sakınca yoktur.
Ağırlık = Kütle x Yerçekimi ivmesi
Ağırlık kütleye ve yerçekimine dayanan bir kuvvettir. Eğer çekim sabiti değişirse
ağırlık da değişir, fakat kütle aynı kalır.
Şekil 1.1 Deney Düzeneği
Şekil 1.2 Yay sabitinin ölçülmesi
Hesaplamalar
1. Ayrı bir kağıt üzerinde, ağırlığın, x-ekseni yayın aldığı yol olmak üzere, yayın
aldığı yola olan grafiğini çiziniz. Nokta değerleriniz üzerinden en iyi uyuşmayı
sağlayan bir çizgi çiziniz. Grafiğin eğimi yay terazisinde kullanılan yayın yay
sabitini verecektir.
2. Yay sabitini çizdiğiniz grafikten hesaplayınız. (N/m) birimini kullanınız.
Yay sabiti (k) =……………………..(N/m)
Sorular
1. Kuvvet ve yaydaki yol değişimi arasındaki çizgisel ilişki Hook kanunu olarak
bilinmektedir. Eğer Hook kanunu geçerli olmasaydı, kuvvetleri ölçmek için bir
yay halen başarılı bir şekilde kullanılabilir miydi? Eğer öyleyse nasıl?
2. Kuvvetlerin ölçümü için bir yayın ayarlanmasında Hook kanunu hangi yönden
kullanışlı bir özellik oluyor?
Tablo 1.1
Kütle (gram)
10
20
30
40
50
60
70
Ağırlık = F = mg (N)
Yayın Aldığı Yol (m)
B- BİLEŞKELERİNE AYRILAN KUVVETLER-BİLEŞKELER
Araçlar
-Deney tahtası
-Derece ölçeği
-Kuvvet çemberi
-Makaralar(3)
-Kütle asıcısı (3)
-İp
Teori
Bu deneyde iki kuvvetin birbirlerine eklendikleri zaman bir tek kuvvet gibi aynı
etkiye sahip olduğunu bulacaksınız. İleride göreceğiniz gibi x-y düzlemindeki
herhangi bir kuvvet x ve y yönündeki kuvvetlerin toplamı olarak ifade edilir.
Düzenek
Düzeneği Şekil 1.3’deki gibi kurunuz. Görüldüğü gibi bir makaradan geçirilerek
kuvvet çemberine bağlı bir kütlenin meydana getirdiği kuvveti F olarak tanımlayın.
Kuvvet çemberini yerinde tutabilmek için tutucu iğneyi kullanınız. İpi dengeden
makaranın altından kuvvet çemberine kadar yatay olarak çalışacak biçimde yaya
terazisini ve makarayı kurunuz. İkinci bir kütleyi direkt olarak kuvvet çemberinden
asınız.
Şekil 1.3 Deney Düzeneği
Şimdi yatay kuvveti veya kuvvetin x-bileşenini ayarlamak için yaya terazisini
makaraya doğru veya ters yönde çekiniz. Dikey kuvveti ya da kuvvetin y-bileşenini
ayarlamak için de dikey kütle asıcısına bağlı olan kütleyi ayarlayınız. Kuvvetlerin x ve
y bileşenlerini tutucu iğnenin kuvvet çemberini ortalayana kadar bu şekilde
ayarlayınız. (Bu x ve y bileşenlerinin gerçekte F kuvvetinin kendisinden çok bu
kuvvetin eşdeğerinin x ve y bileşenleri olduğuna dikkat ediniz)
Yöntem
1. F’in büyüklüğünü ve açısını kaydedin. Açıyı Şekil 1.3’de görüldüğü gibi ölçün.
Büyüklük=…………………………..
Açı=……………………………….
2. F’in eşdeğerinin x ve y bileşenlerinin büyüklüğünü kaydedin.
x-bileşeni=…………………………..
y-bileşeni=…………………………
3. F’in x ve y bileşeni olan Fx ve Fy’nin büyüklükleri nedir?
Fx=………………………………….
Fy=…………………………………
4. F’in açısını ve F, Fx ve Fy’nin büyüklüklerini kaydedin.
F:Büyüklüğü=……………………...
Açı=………………………………..
Fx=………………………………….
Fy=…………………………………
Vektörleri tanımlamak için neden onların bileşkesini kullanıyoruz? Bunun bir
sebebi bileşenlerin kullanımı matematiksel olarak vektörlerin toplanmasını daha kolay
hale getiriyor. Şekil 1.4 x-ekseni ile θ gibi bir açı yapmış ve uzunluğu F olan bir
kuvvetin x ve y bileşenlerini göstermektedir. Bileşenler birbirlerine 90 0 açı yaptıkları
için onların toplamlarını bulmak için kullanılan paralelkenar kuralı bir dikdörtgendir.
Dik üçgen özelliğini kullanarak AOX, F’in bileşenleri kolayca hesaplanabilir; x-bileşeni
Fcosθ’ya ve y-bileşeni de Fsinθ’ya eşittir. Eğer eklenen birçok vektörünüz var ise, ilk
olarak her bir vektörün x ve y bileşenlerini tespit ediniz. Bütün x-bileşenlerini beraber
ve bütün y-bileşenlerini de beraber toplayınız. Çıkan değer toplamı kuvvetin x ve y
bileşenlerini verecektir.
Bir makara ve asıcı kütle kullanarak bir kuvvet vektörünün yönünü ve
büyüklüğünü istenilen şekilde oluşturmak için bu deneyin ilk bölümünde olduğu gibi
deney düzeneğini kurun. Derece düzleminin x-eksenine paralel olmasına dikkat
ediniz.
5. Kurduğunuz kuvvet vektörünün (F’in) açısını ve büyüklüğünü kaydediniz.
Büyüklüğü=……………………………..
Açı=……………………………..
6. F’in x ve y bileşenlerinin büyüklüklerinin olan Fx ve Fy’yi hesaplayınız.(Fx=
Fcosθ, Fy= Fsinθ)
Fx =……………………………………..
Fy= ………………………………
Şimdi deneyin ilk bölümünde olduğu gibi (Şekil 1.6) yay terazisi ve bir asılı
kütle düzeneğini kurunuz. 6.soruda hesapladığınız değerleri kullanarak yay terazisini
kuvvet çemberini yatay olarak Fx miktarı kadar çekecek şekilde ayarlayınız. Asılı
kütleyi de kuvvet çemberine dik yönde Fy miktarı kadar çekecek şekilde ayarlayınız.
Şekil 1.4 Vektör Bileşenleri
Sorular
1) Kuvvet çemberi derece düzleminin ortasında dengede mi bulunuyor? Genel
olarak yukarıda yaptığınız gibi bir vektörün birbirlerine dik iki eksen boyunca
bileşenlerini bulmak için kullanışlı bir yöntemdir. Fakat her zaman için x ve y
eksenleri birbirlerine dik olmayabilir. Eğer yeterli zamanınız varsa deney
düzeneğinizi bir vektörün birbirlerine dik olmayan eksenler üzerindeki
bileşenlerini bulmak için kurmaya çalışınız.(Bileşke kuvvetleri dik olmayan
eksenlere yönlendirmek için makaralar kullanınız)
2) Bir vektörün dik olmayan eksenler üzerindeki bileşenlerini bulmak için kurmaya
çalıştığınız düzenekte ne gibi zorluklarla karşılaştınız.
DENEY 2: MERMİ FIRLATICISI
MERMİ YOLU
Araçlar
-Mermi fırlatıcısı ve plastik top
-Grafik kağıdı
-Karbon kağıdı
-Cetvel
-Düşeyde hareket edebilen hedef tahta
-Beyaz kağıt
Amaç
Bu deneyin amacı bir masadan yatay olarak fırlatılan topun düşeyde aldığı
yolun yatayda aldığı yola nasıl bağlı olduğunu bulmaktır.
Teori
Menzil namlu ile topun çarptığı yer arasındaki yatay uzaklıktır. Menzil x ile
gösterilir ve x=v0t ile hesaplanır. Burada v0 topun ilk hızıdır ve t uçuş zamanıdır. Eğer
top yatay olarak fırlatılırsa topun uçuş zamanı t=x/v0 olacaktır. Topun t süresinde
aldığı düşey mesafe
ile verilir. Burada g yerçekimi ivmesidir. t’yi y’de yerine yazarsak denklem
haline gelir.
Düzenek
1. Mermi fırlatıcısını bir masanın kenarına mengene ile sıkıştırınız.
2. Mermi fırlatıcısının açısını sıfır dereceye ayarlayın ki top yatay olarak fırlatılsın.
3. Düşey hedefin ilk konumunu belirlemek için orta menzilde bir test atışı yapın.
Top hedefin alt tarafına çarpacak şekilde hedefi yerleştirin.
4. Hedef tahtayı beyaz kağıtla kaplayın bunun üzerine de karbon kağıdını
sabitleyin.
Deneyin Yapılışı
1. Namludan taban kadar olan yüksekliği ölçün ve bunu Tablo 2.1’e kaydedin. Bu
yüksekliği hedefin üzerinde işaretleyin.
2. Kurşun fırlatıcısının namlusundan hedefe kadar olan yatay uzaklığı ölçün ve
sonucu Tablo 2.1’e kaydedin.
3. Topu fırlatın.
4. Hedefi 10 ile 20 cm arasında fırlatıcıya yaklaştırın.
5. Topun hedefte çarptığı noktanın namlunun yüksekliğinden 10 ile 20 cm
arasında aşağıda kalmasını sağlayana kadar 2 nolu maddeden 4 nolu
maddeye kadar olan işlemleri tekrarlayın.
Şekil 2.1 Deney Düzeneği
Tablo 2.1 Veriler
Namlunun Yüksekliği=……………………….
Yatay (x)
Yükseklik (y)
x2
Analiz
1. Hedef üzerinde işaretlenen namlu seviyesi çizgisi ile topun bıraktığı iz
arasındaki düşey uzaklığı ölçün ve sonucu Tablo 2.1’e kaydedin.
2. Bütün noktaların verileri için x2yi hesaplayın ve sonuçları Tablo 2.1’e kaydedin.
3. y’nin x2’ye göre değişiminde en uygun doğruyu veren grafiği çizin.
4. Grafiğin eğimini hesaplayın ve Tablo 2.2’ye kaydedin.
5. Grafiğin eğiminden topun ilk hızını hesaplayın ve Tablo 2.2’ye kaydedin.
6. Herhangi bir x ve y değeri kullanın. Y’den t’yi bulun ve x ile t’den ilk hızı bulun.
7. İlk hızın bu iki yöntemle bulunan değerleri arasındaki yüzde hatayı hesaplayın
ve Tablo 2.2’ye kaydedin.
Tablo 2.2 İlk Hız
Grafiğin Eğimi
Eğimden hesaplanan ilk hız
Uçuş süresi
x ve y den hesaplanan ilk hız
Yüzde hata
Sorular
1. Çizgi doğru mudur? Bu sonuç size x ile y arasındaki ilişki hakkında ne anlatır?
2. Eğer y’nin x’e göre grafiğini çizerseniz bu grafik y’nin x2’ye göre grafiğinden
nasıl farklıdır?
3. Merminin yolu ne şekildedir?
DENEY 3 : BASİT HARMONİK TİTREŞTİRİCİ (OSİLATÖR)
Araçlar
-Araba
-Araba yolu
-2 Yay
-Makara, ip
-Kütle çengeli ve kütle takımı
-Kronometre
-Dengeleme kütleleri
-Grafik kağıdı
Amaç
İki ucu yaya bağlı arabanın sürtünmesiz yol üzerinde yaptığı periyodik
hareketin incelenmesi, periyodunun deneysel ve teorik değerlerinin karşılaştırılması.
Teorik Bilgi
Yaya bağlı kütlenin yaptığı titreşim hareketi için periyot
olarak verilir. Burada T kütlenin ilk bulunduğu noktadan ileri geri gidip gelerek yine
aynı noktaya gelmesi için geçen süredir, m titreşim hareketi yapan cismin kütlesi ve k
da yay sabitidir.
Hooke kanununa göre sıkıştırılmış yayın uyguladığı kuvvet F=kx dir. k sabiti
yaya göre değişir. Aynı yay sabitine sahip yay değişik kuvvetler uygulanılarak farklı
uzunluklarda sıkıştırılabilir. Kuvvete karşı yaydaki uzama arasında çizilen grafik
çizgisel olarak değişir, buradan da k bulunabilir.
Deneyin Yapılışı:
Teorik Olarak Bulunan Periyot
1. Arabanın kütlesini bulunuz ve bu değeri Tablo 3.1’e yazınız.
2. Arabayı yol üzerine yerleştirip araba yol üzerinde hareketsiz olana kadar yolun
eğimini aşağıya veya yukarıya kaldırarak dengeleyiniz.
3. Şekil 3.1’deki gibi yayaları araba ve yol üzerindeki engellere bağlayınız.
4. Yaylara bağlı olan arabaya, iple makara üzerinden geçirerek kütle çengelini
bağlayınız.
5. Arabaya bütün bağlantıları yaptıktan sonra arabanın denge durumunu Tablo
3.1’e kaydedin.
6. Kütle çengeline kütleler ekleyerek her ek kütle için yeni durumları kaydedin.
Beş farklı kütle için bunları yeniden kaydedin. Yayları gereğinden fazla
germeyin. Bu metot her iki yay için yay sabitini verecektir.
Şekil 3.1 Deney Seti
Tablo 3.1
Arabanın kütlesi=………………..
Ek Kütle (m)
Kuvvet (mg)
Denge konumu=……………………
Konum
Denge Konumundan Olan
Yerdeğiştirme
Hesaplama (Teorik Periyot)
1. Tablo 3.1’deki verileri kullanarak kuvvete karşı yerdeğiştirmeyi gösteren grafiği
çiziniz. Verilen noktalardan en uygun şekilde geçen bir çizgi çekiniz ve bu
çizginin eğimini bulunuz. Grafiğin eğimi, yay sabiti k’ya eşittir.
k=………………….
Şekil 3.2
2. Arabanın kütlesi ve yay sabitini kullanarak teorik formülden periyodu
hesaplayınız. Arabanın üzerine 500 g kütle eklendiğinde yine teorik olarak
periyodu bulunuz.
Periyot(Teorik)
Kütlesiz Araba
T1=
Kütleli Araba
T2=
Deneysel Olarak Bulunan Periyot
7. Arabanın ucuna asmış olduğunuz ipi ve kütle çengelini çıkarınız ve arabayı
denge durumuna getiriniz.
8. Denge durumunda bulunan arabayı, yayları çok germeyecek şekilde denge
konumundan uzağa çekip bırakarak titreşim hareketi yaptırınız. Her denemede
5 titreşim hareketi için geçen zamanı Tablo 3.2’ye yazınız.
9. Arabaya 500 g kütle ilave ederek yine 5 titreşim için geçen zamanı 5 deneme
için tekrarlayarak bulunuz ve Tablo 3.2’ye yazınız.
Hesaplama (Deneysel Periyot)
1. Tablo 3.2’deki verileri kullanarak, kütleli ve kütlesiz arabanın ayrı ayrı 5 titreşim
için ortalama zamanlarını bulunuz.
2. Bulunan bu ortalama zamanlar 5 titreşim içindir. Periyot ise 1 titreşim için
geçen süre demektir. Bu nedenle periyodu hesaplamak için bu ortalama
zamanları 5’e bölünüz ve Tablo 3.2’ye kütleli ve kütlesiz araba için bulduğunuz
periyotları yazınız.
Tablo 3.2
Deneme
5 titreşim için geçen
zaman
1
2
3
4
5
Ortalama
Deneme
1
2
3
4
5
Ortalama
Periyot (Deneysel)
Kütlesiz Arabanın
Periyodu
T1=
5 titreşim için geçen
zaman
Periyot (Deneysel)
Kütleli Arabanın Periyodu
T1=
Karşılaştırma
Ölçülen ve teorik değerler arasındaki % hatayı hesaplayınız.
Kütlesiz araba için % hata=…………………
Kütleli araba için % hata=…………………..
DENEY 4: NEWTON’UN İKİNCİ KANUNU
Araçlar
-Araba
-Kütle çengeli ve kütle seti
-Araba yolu
-Ağaç veya metal durdurucu blok
-İp, Makara
-Kronometre
-Taban ve destek çubuğu
-Denge kütlesi
Amaç
Newton’un İkinci Kanunu’nu
doğrulamak.
Teori
Newton’un İkinci Kanunu’na göre
dır. F, cisim üzerine etkiyen bileşke
kuvvet; m, cismin kütlesi ve a ise cismin ivmesidir. Deney sisteminde arabanın kütlesi
m1, kütle çengelinin kütlesi m2 ise (Şekil 4.1) bileşke kuvvet F tüm sisteme etkir. Kütle
çengelinin ağırlığından dolayı F=m2g olur. Cismin üzerine etkiyen sürtünme kuvveti
ihmal edilebilir.
Newton’un İkinci Kanunu’na göre sistem üzerine etkiyen bileşke kuvvet ma’ya
eşittir. Burada m sistemin toplam kütlesidir ve (m1+m2)’ye eşittir. Bu deneyde
sürtünmeyi göz ardı ettiğimizden F=m2g kuvveti, (m1+m2)a’ya eşit olacaktır.
F=m2g=(m1+m2)a
Deneyde sistemin ivmesinin bulmak için arabanın belirli bir d yolunu alması
için geçen zamanı ölçerek
’den ivme hesaplanabilir. Buna göre ivme
olarak bulunur.
Deneyin Yapılışı
1. Yolun üzerine arabayı yerleştiriniz ve araba hareketsiz duruma gelene kadar
yolun altındaki ayakları aşağı veya yukarı ayarlayarak yolu düz konuma
getiriniz.
2. Arabanın kütlesini Tablo 4.1’e kaydedin.
3. Makarayı yolun ucuna Şekil 4.1’deki gibi bağlayınız. Arabayı yolun üzerine
yerleştirerek araba üzerinde bulunan deliğe ipi bağlayınız. İpin diğer ucunu
askı çengeline bağlayınız. Kütle çengeli yere çarpmadan önce araba engele
çarpacak şekilde ipin boyunu ayarlayın.
Şekil 4.1 Deney seti
4. Arabanın konumunu Tablo 4.1’e kaydedin. Bütün denemeleri aynı uzaklık için
yapın.
5. Arabaya ve/veya askı çengeline kütleler ekleyerek yeni konumları ve
zamanları kaydedin.
6. En az 5 defa ölçüm yapın ve değerleri Tablo 4.1’e kaydedin.
Tablo 4.1
m1
(arabanı
n
kütlesi)
m2 (kütle
çengelini
n kütlesi)
d (yer değiştirme=son
konum-ilk konum)
t1
t2
t3
t4
t5
tort
(ortalama
zaman)
Veri Analizi
1. Ortalama zamanları hesaplayıp Tablo 4.1’e kaydedin.
2. Tablo 4.1’deki verileri kullanarak her durum için ivmeyi hesaplayın ve Tablo
4.2’ye kaydedin.
3. Her durum için (m1+m2)a değerini hesaplayın ve Tablo 4.2’ye kaydedin.
4. Her durum için F=m2g değerini hesaplayın ve Tablo 4.2’ye kaydedin.
5. F=m2g ile (m1+m2)a arasındaki % hatayı hesaplayın ve Tablo 4.2’ye kaydedin.
Tablo 4.2.
m1 (arabanın
kütlesi)
m2 (kütle
çengelinin
kütlesi)
a (ivme)
(m1+m2)a
F=m2g
% hata
DENEY 5 : JİRESKOP GÖSTERİMİ
Araçlar
-Jireskop
-Kütle ve asıcı seti
-Kronometre
-Cetvel
-Süper makara
-Makara tutturucusu
-Makara yükleme çubuğu
-İp (1.5 metre)
Amaç
Bir jireskopun
karşılaştırmak.
presesyon
oranını ölçmek ve
bunu
teorik değerlerle
Teori
Moment, eksenin sonuna bir kütle asılmasıyla jireskopa uygulanır. Bu moment
jireskopun belli bir açısal hızla presesyon hareketi yapmasını sağlar. Jireskopu
başlangıçta yatay konumda dengeleyin. Diski ω açısal hızında döndürün ve daha
sonra m kütlesini dönme ekseninden d uzaklığında jireskop ekseninin sonuna
tutturun. Bu kütle τ = mgd momentine neden olur. Aynı anda moment dL/dt’ye de
eşittir. Burada L diskin açısal momentumudur. Şekil 5.1’de gösterildiği gibi açıdaki
küçük değişmeler için dL = L.dφ olur.
Yandan görünüş
Üstten görünüş
Şekil 5.1 Jireskopa uygulanan moment
Moment denkleminde dL yerine yazılırsa
eşitliği ortaya çıkar.
ve presesyon oranı
olduğu için presesyon hızı
olur. Burada I diskin eylemsizlik momentidir ve ω açısal hızıdır. Deneysel olarak
diskin eylemsizlik momentini bulmak için bilinen bir moment diske uygulanır ve sonuç
olarak açısal ivme ölçülür.
olduğu için
olur. Burada α açısal ivmedir ve a/r’ye eşittir. τ ise diskin üzerindeki makaraya sarılan
ipe kütlenin asılmasıyla oluşan momenttir.
Burada r ipin dolandığı makaranın yarıçapıdır ve F disk döndüğünde ipteki gerilmedir.
Asılı kütleye Newton’un 2.kanununu uygularsak
olur.
Şekil 5.2 Dönen disk ve serbest cisim diyagramı
Buradan
olarak bulunur. Böylece m kütlesinin çizgisel ivmesi belirlenebilir, moment ve açısal
ivme eylemsizlik momentinin hesaplanması için bulunabilir. İvme, kütle belli bir y
uzaklığından düşerken düşme zamanının ölçülmesiyle bulunur ve ivme şöyle ifade
edilir:
Deneyin Yapılışı
1. Ek kütleyi Tablo 5.1’e kaydedin. Eksenin sonuna ek kütleyi takın. Dönme
ekseninden ek kütle merkezine olan d uzaklığını ölçün. Tablo 5.1’e bu uzaklığı
kaydedin.
2. Saniyede yaklaşık 2 dönme yapacak şekilde diski döndürün. Diskin ω açısal
hızını bulmak için diskin 10 kez dönmesi için geçen zamanını ölçün. Tablo
5.1’e kaydedin.
3. Jireskopa presesyon hareketi yaptırın ve presesyon oranını bulmak için iki
dönme için geçen zamanı ölçün. Tablo 5.1’e kaydedin.
4. Diskin 10 kez dönmesi için geçen zamanı tekrar ölçün, önceki ve sonraki
verileri presesyon süresince diskin ortalama açısal hızını bulmak için kullanın.
Tablo 5.1 Açısal hızın ölçülmesi
Ek Kütle
Uzaklık(d)
10 dönme için geçen zaman (ilk)
Presesyon için geçen zaman
10 dönme için geçen zaman (son)
Sürtünmenin Hesaba Katılması
Teori sürtünmeyi hesaba katmadığı için bu sürtünmeyi karşılayan kütleyi
bulmak gerekir. Kütle sabit bir hızla düştüğünde kütlenin ağırlığı kinetik sürtünmeye
eşit demektir. Daha sonradan sistemi ivmelendiren kütleden bu sürtünme kütlesini
çıkaracağız. Kinetik sürtünmenin üstesinden gelen kütleyi bulmak için makaraya
yeteri kadar ağırlık asılmalıdır ki hız sabit kalsın. Tablo 5.2’ye sürtünme kütlesini
kaydedin.
5. İvmeyi bulmak için makara üzerine 30 g koyarak ipi dolayın ve kütlenin
masadan yere düşmesine izin verin ve düşme zamanını ölçün.
6. Bunu 5 kez tekrarlayın, her zaman kütle aynı konumda iken bağlayın.
7. Kütlenin düştüğü yüksekliği ölçün ve Tablo 5.2’ye kaydedin.
8. Cetvel kullanarak ipin sarıldığı makaranın yarıçapını ölçün. Tablo 5.2’ye
kaydedin.
Tablo 5.2 Eylemsizlik momenti verileri
Sürtünme kütlesi
Asılı kütle
Kütlenin düştüğü yükseklik
Makaranın yarıçapı
Zamanlar
Ortalama:
9. Tablo 5.2’deki ortalama zamanı kullanarak ivmeyi hesaplayın ve Tablo 5.3’e
kaydedin.
10. Eylemsizlik momentinin hesaplanması:
A) Denklemlerde kullanılacak m kütlesini belirlemek için diski ivmelendiren
asılı kütleden sürtünme kütlesini çıkarın.
B) Eylemsizlik momentinin deneysel değerini hesaplayın.
Tablo 5.3’e
kaydedin.
11. Tablo 5.1’de 10 dönme için geçen zamanları kullanarak periyotları bulmak için
bunları 10’a bölün. Bu iki periyotun ortalamasını alın ve ortalama açısal hızı
ω=2π/T denkleminden hesaplayın ve Tablo 5.3’e kaydedin.
12. Presesyon zamanını ikiye bölerek ve Ω=2π/T’yi hesaplayarak presesyon oranı
için deneysel değeri bulun ve Tablo 5.3’e kaydedin.
13. Presesyon oranı için teorik değeri hesaplayın ve Tablo 5.3’e kaydedin.
14. Deneysel presesyon oranını ve teorik değerleri arasındaki yüzdelik farkı
hesaplayın.
Tablo 5.3 Sonuçlar
İvme
Eylemsizlik momenti
Diskin ortalama açısal hızı
Deneysel presesyon oranı
Teorik presesyon oranı
% Fark
DENEY 6 : MOMENT
A-MOMENT
Teori
Moment matematiksel olarak aşağıdaki vektör denklemi ile tanımlanır.
rF
(6.1)
Burada =moment, F=uygulanan kuvvet, r=dönme ekseninden kuvvetin
uygulandığı noktaya olan uzaklıktır. Momentin yönü sağ el kuralı ile belirlenir. Şekil
6.1’ de momentin yönü sayfanın dışına doğrudur. Momentin büyüklüğü ise
= = r . ( sin ) . F
(6.2)
Burada , r ve F arasındaki açıdır. r( sin ) = r dönme ekseninden kuvvetin
uygulandığı eksene olan dik uzaklıktır. Moment aşağıdaki denklemle de gösterilir.
= r F
(6.3)
Mekanik dengede olan bir cisim için (hareketsiz ya da sabit hızla hareketli) iki
koşul sağlanmalıdır. Cisim üzerine etki eden dış kuvvetlerin toplamı sıfıra eşit
olmalıdır ve cisim üzerine etki eden dış momentlerin toplamı sıfıra eşit olmalıdır.
Moment vektörü cihazı bu şartların ikincisini incelemek için kullanılır. Momentler
asılan kütlelerle mil üzerindeki topa uygulanır ve topun denge konumuna dönmesine
izin verilir. Bu konumda uygulanan momentlerin tümünün toplamı sıfıra eşit olmalıdır.
Bu gerçek momentlerin ölçülmesiyle doğrulanabilir.
Her bir momentin büyüklüğü Denklem 6.3 kullanılarak ölçülür. Her moment için
kuvvet, asılan kütlelerin ağırlıdır ve r Şekil 6.2’ de gösterildiği gibi milimetre ölçek
kullanılarak ölçülür. Her bir momentin yönü dereceli skala (iletki) kullanılarak ölçülür.
Milimetre ölçeği asılı kütleyi taşıyan ipe değdiğinde, işaretleyici kütlenin ağırlığı
tarafından uygulanan momentin yönünü gösterir.
Moment vektörlerinin tamamı bu yolla ölçüldükten sonra ya trigonometrik olarak ya
da vektörel olarak toplanırlar. Sonuç her zaman sıfıra eşit olmalıdır.
Deneyin Yapışı
UYARI: Üstte yer alan desteğin düşmemesi için kütle değiştirirken topu mutlaka
tutunuz. Ayrıca terazinin herhangi bir koluna 75g‘dan daha fazla kütle asmayınız ve
toplam kütle 200g‘ ı geçmemesine dikkat ediniz.
1- Üç ayağın seviyelerini dengeleyene kadar ayarlayınız.
2- 10cm uzunluğunda 3 adet iplik kesiniz. Denge koluna her bir ipliğin ucuna
bağlayın, ve kütle askılarını asmak için ipin diğer ucuna bir ilmek atınız.
3- Topu tutarken üç ipliğin ucuna kütle askılarını takınız. Askıların her birine ek
kütleler koyunuz (örneğin 20g, 50g ve 70g olabilir) Tablo 6.1’e kullandığınız
kütleleri kaydediniz. Kütle askılarının kütlelerini de eklemeyi unutmayınız.
4- Topu bırakınız ve pompayı sıkarak topun dönmesini sağlayınız. Pompalamaya
topun dönmesi durana kadar devam ediniz. Terazi kollarından herhangi birinin
merkez direğe değmemesine dikkat ediniz. Eğer değiyorsa, değmeyecek
şekilde kütleleri değiştirin. (NOT: Bazen kütlenin bir tanesi o kadar alçak olur ki
masaya temas eder. Böyle bir durumda ipi kısaltıp ve yeniden pompalayınız)
Şekil 6.1 Moment diyagramı
Şekil 6.2 Momentin ölçülmesi
5- Asılan kütlelerin her biri için Şekil 6.4’ teki gibi r ve ‘ yı ölçünüz. Milimetre
ölçeğini ipe temas etmeyecek şekilde uzatınız. Milimetreli ölçek üzerindeki r ‘i
ölçünüz ve cihazın tabanındaki dereceli ölçekten ‘yı ölçünüz. Sonuçlarınızı
Tablo 6.1‘e kaydediniz.
NOT: Doğru ölçüm için milimetreli öçlük ölçtüğünüzü her bir moment için ipin aynı
tarafında olmalıdır. Eğer kütle çok yüksek ise r ‘i ölçmek için milimetre ölçeğini ipe
ulaşacak şekilde yükseltiniz (Şekil 6.5a). ‘yı ölçmek için milimetre ölçeğini ipe
değecek şekilde eğiniz ancak kütle yerinde oynamasın (Şekil 6.b).
Analiz
1- açısı, kuvvet vektörü (F) ve yer değiştirme vektörünü (r) içeren düzleme dik
olan moment vektörünün yönünü gösterir. Yer değiştirme vektörü başlangıç
noktası destek topunun merkezi olan vektörünün ucunda ve ip boyunca aşağı
doğru uzanan vektördür. Kuvvet vektörü asılı kütlenin ağırlığı ile orantılıdır.
Bütün moment vektörlerinin yatay düzlemde olmasına dikkat ediniz. Çünkü
bunların hepsi dikey konumda olan kuvvet vektörlerine diktir.
2- Her bir kütle tarafından uygulanan kuvveti hesaplayınız ve değerleri Tablo
6.1’e kaydediniz.
3- Her bir kütlenin ağırlığı tarafından uygulanan momenti hesaplayınız ve
değerlerini kaydediniz.
Şekil 6.3 Deney Düzeneği
Şekil 6.4 r┴ ve θ nın ölçülmesi
4- Dik koordinatlarda üç moment vektörünü çiziniz. Her bir vektörün uzunluğu
moment vektörü ile orantılıdır ve her bir vektörün açısı x eksenine göre
ölçülmüştür. Şekil 6.6’da bir moment vektörü gösterilmiştir.
5- Her bir moment vektörünü x ve y bileşenine ayırınız. Her moment vektörü için
her bir bileşenin değerini kaydediniz. Çizimi kullanarak bileşenlerin
büyüklüğünü ölçebilirsiniz ve ya bileşenleri trigonometrik olarak
hesaplayabilirsiniz (Tx = TCos. Ty = TCos).
6- Tüm pozitif x bileşenlerinin toplamını hesaplayınız. Benzer şekilde negatif x
bileşenlerinin toplamını da hesaplayınız. Bu değerlerin her ikisini de
kaydediniz.
7- 6. adımdaki iki toplamınız arasındaki yüzdelik farkı hesaplayınız.
Şekil 6.5 Kütle yüksekte iken r┴ ve θ nın
ölçülmesi
Şekil 6.6 Moment diyagramı
Burada
= Pozitif x bileşenlerinin toplamı
= Negatif x bileşenlerinin mutlak değerlerinin toplamı
8- Moment vektörlerinizin y bileşenleri için 6. ve 7. adımı tekrarlayın.
Tablo 6.1 Veri ve hesaplamalar
A
Veri
Moment
B
C
Kütle, M (g)
Düşey uzaklık, r (cm)
Açı, (derece)
Kuvvet, F (Newton)
Moment, (N.m)
x-bileşeni
y-bileşeni
Pozitif x-bileşenlerinin
toplamı
Negatif x-bileşenlerinin
toplamı
% fark
Pozitif y-bileşenlerinin
toplamı
Negatif y-bileşenlerinin
toplamı
% fark
B- Kuvvet Masası
a- Vektör Toplamı
Araçlar:
-Kuvvet masası
- ip
-3 makara ve makara kıskacı
- cetvel
-3 kütle askısı
- iletki
-Kütle seti
Amaç
Bu deneyin amacı kuvvet masası kullanarak dengeleyen üçüncü kuvveti
deneysel olarak belirlemektir.
Teori
Bu deneyde üç metot kullanarak iki vektörün toplamı bulunur: 1. Deneysel
olarak, 2. Bileşenlerine ayırarak ve 3. Grafiksel olarak.
Not: Tüm durumlarda makara üzerine kütlenin asılmasıyla ortaya çıkan kuvvet
yerçekimi ivmesiyle kütlenin çarpılmasıyla bulunur.
1. Deneysel metot
İki kuvvet, belli açılarda yerleşmiş makaralara asılan kütleler tarafından kuvvet
masasına uygulanır. Daha sonra üçüncü makaraya asılan kütle bunun açısı diğer iki
kuvvet dengelenene kadar ayarlanır. Bu üçüncü kuvvet dengeyi sağlayan kuvvet
olduğu için dengeleyici (
)olarak tanımlanır. Dengeleyici kuvvet bileşke kuvvetin (
) aynısı değildir. Dengeleyici kuvvet bileşke kuvvete zıt yöndedir (Şekil 6.7). Bu
nedenle dengeleyici kuvvet, bileşke kuvvetin negatifidir.
+
Şekil 6.7 Bileşke kuvveti dengeleyen kuvvet
Şekil 6.8 Bileşenler
2. Bileşen metodu
İlk olarak iki kuvvet trigonometri kullanılarak x ve y bileşenlerine ayrılır.
+
ve
+
Burada
,
vektörünün x bileşeni ve , x yönünde birim vektördür (Şekil 6.8).
ve
toplamını belirtmek için, bileşenler
bileşke kuvvetinin bileşenleri olarak
toplanırlar.
=(
+
)
+(
+
)
=
+
Bileşke kuvvetin bir yönü (açı) ve büyüklüğü olmalıdır. Bileşke kuvvetin
büyüklüğü ( ve
) Pisagor teoremi kullanılarak bulunur. Trigonometri kullanılarak
açılar bulunur.
=
Tan ( ) =
3. Grafiksel metod
İki kuvvet, bir iletki ve cetvel kullanılarak ölçeklendirilerek kuvvetlerin
çizilmesiyle toplanırlar. İkinci kuvvet ve (
ilk kuvvet (
) nın başına gelecek
şekilde çizilir. Bileşke kuvvet (
),
sonundan
nin başına çizilir ( Şekil 6.9 ).
Bileşkenin büyüklüğü şekilde direk olarak ölçülebilir ve seçilen ölçek kullanılarak
uygun kuvvete dönüştürülür. Açı, iletki kullanılarak ölçülür.
Şekil 6.9 Vektör Toplamı
Analiz
Deneysel Metot
Deneme yanılma yöntemiyle iki kütleyi dengeleyecek üçüncü kütleyi ve bu
kütlenin asılı olduğu makaranın açısını belirleyin. Bu üçüncü kuvvet
dengeleyici
kuvvet olarak adlandırılır. Dengeleyici kuvvet, bileşke kuvvetin negatifidir.
+
Üçüncü makaraya asılı olan ve sistemi dengeleyen bu kütleyi Tablo 2’ye kaydedin.
Sistemin dengede olup olmadığını belirlemek için aşağıdaki işlemi yapın.
Dengeyi Bulmak İçin Halka Metodu
Sistem dengedeyken halka merkezde olmalıdır. Merkez çubuğu çevirerek
halkayı serbest bırakın halkayı yavaşça bir tarafa doğru çekin ve bırakın. Eğer halka
dönmüyorsa, gerekli kütle veya açıları değiştirerek her defasında merkeze dönecek
şekilde ayarlayın. Teorik olarak üçüncü makarada asılı kütleyi ve açısını bulmak için
bileşenler metoduyla ve grafik metoduyla dengeleyici
kuvvetini bulun.
Bileşenler Metodu
Bir kağıt üzerine A ve B kuvvetlerinin bileşenlerini toplayın ve dengeleyici
kuvveti bulun. Yönü belirlemek için trigonometri kullanın ( Bileşkenin, dengeleyici
kuvvetin tam zıttı olduğunu hatırlayın). Sonuçları Tablo 6.2’ye kaydedin.
Grafik Metodu
Bir kağıt üzerinde A ve B kuvvet vektörlerini uç uca ekleyerek çizin. Cetvel
yardımıyla bileşke kuvvetin yönünü ve uzunluğunu bulun. Sonuçları Tablo 6.2’ye
kaydedin. Dengeleyici kuvvetin yönünü tabloya kaydedin.
Tablo 6.2 Vektörlerin toplanmasında kullanıla üç metodun sonuçları
Metot
Dengeleyici (
Büyüklük
Deneysel:
Bileşen:
Grafiksel
=
=
)
Yön ()
DENEY 7: YERÇEKİMİ KUVVETİ VE ORTALAMA HIZ
YERÇEKİMİ KUVVETİ
Araçlar
-Havayolu sistemi ve araba
-Kronometre
Giriş
Bu deneyde Newton’un ikinci kanunu kullanılacaktır (F=ma). İdeal olarak
basitçe dünyanın çekim kuvveti sayesinde serbest olarak düşen bir cismin kütlesini
ölçüp üzerindeki kuvveti hesaplayacak ve ivmesini ölçeceksiniz. Oysa serbest düşen
bir cismin ivmesini hassas bir şekilde ölçmek zordur. Ölçüm hassasiyeti eğimli bir
yüzey üzerinde yavaşça kayan bir cisim sayesinde arttırılabilir. Şekil 7.1’de deney
düzeneğini bulabilirsiniz. Çekim kuvveti Fg iki bileşenine ayrılabilir. Bu bileşenlerden
birisi arabaya dik diğeri de hareket yönündedir. Bileşenlerden sadece hareket
yönündeki arabayı ivmelendirir. Diğer bileşen arabaya dik etki eden hava akımı
sayesinde dengelenir. Şekilden de görüldüğü gibi
arabayı ivmelendiren
kuvvettir. Arabanın ivmesini ölçerek F belirlenip Fg hesaplanır.
Şekil 7.1 Arabaya Etkiyen Kuvvetler
Şekil 7.2 Deney Düzeneği
Deneyin Yapılışı
1. Hava yolunu Şekil 7.2’deki gibi yerleştirin.
2. Hava yolunun destek noktaları arasındaki uzaklığı ölçüp bulduğunuz d
uzaklığını kaydedin.
3. h yüksekliğindeki bir bloğu hava yolunun ayağının altına yerleştirin ve h
yüksekliğini kaydedin.
4. İki kapı arasındaki uzaklığı ölçüp D olarak kaydedin.
5. Arabanın kütlesini kaydedin.
6. Arabayı hava yolunun başından bırakarak kronometreye basın. İlk kapıdan
geçene kadarki süreyi t1 olarak kaydedin. Arabanın 1. ve 2. kapılar arası
geçirdiği süreyi yine kronometre ile ölçün ve t2 olarak kaydedin.
7. Aynı ölçümlerden birçok kez tekrarlayarak Tablo 7.1’e kaydedin.
Veri ve Hesaplamalar
1.
eşitliğini kullanarak θ açısını belirleyiniz.
2. Her zaman aralığı için L uzunluğunu t1 ve t2 ye bölerek v1 ve v2 hızlarını bulun.
3. Her ölçüm için
yi kullanarak arabanın ivmesini
bulun.
4. Ortalama ivmeyi bulun.
5. Her bir ölçüm için
yı kullanarak araba üzerindeki kuvveti bulun.
6.
yı kullanarak her bir ölçüm için yi bulun.
7. Kütleyi(m) x eksenine yerleştirerek
d=………………………..
grafiğini çizin.
D=……………………….. θ=……………………….
h=……………………….
L=………………………...
Tablo 7.1 Veri ve Hesaplamalar
m
t1
t2
v1
v2
a
aort
Fg
Analiz
Çizilen
grafiği nasıl bir bağlantı gösteriyor? Grafik orijinden geçiyor mu?
Grafiğin eğiminden yer çekimi ivmesi g sabitini bulun.
ORTALAMA HIZ
Araçlar
-Havayolu sistemi ve araba
-Kronometre
Giriş
Ortalama hız değeri kullanışlı olabilir. Ortalama hız kavramını kullanarak belli
bir süre sonunda nerede olacağımızı tahmin edebiliriz. Ancak trafik polisleri ortalama
hızınızdan çok radarla ölçüm yaptıkları andaki hızınızla ilgilenirler. Bu deneyde
ortalama hız ile ani hız arasındaki ilişkiyi araştıracaksınız.
Şekil 7.3 Düzeneğin Hazırlanması
Yapılacak işlemler
1- Şekil 7.3’de görüldüğü gibi hava yolunun son noktasını 1-2 cm lik bir destek
yerleştirin.
2noktasını ölçüp Tablo 7.3 e kaydedin.
3- Araba için
noktası seçip kurşun kalem ile hava yolu üzerinde işaretleyin.
Böylece her zaman aynı noktayı kullanabilirsiniz.
4- Şekildeki gibi ışık kapısı zamanlayıcı ve yardımcı ışık kapısını
den eşit
uzaklıklara koyup ışık kapıları arasındaki mesafeyi D olarak Tablo 7.3’e
kaydedin.
5- Arabayı
da tutup sonra bırakın. Araba iki ışık kapısından geçerken
zamanları t1 olarak kaydedin.
6- 5. adımı dört kez tekrarlayıp zamanları t2, t3, t4, t5 olarak kaydedin.
7- Uzaklığı 10 cm kadar azaltıp 4-6 arasındaki adımları tekrar edin.
Veri ve Hesaplamalar
1- D’nin her değeri için t1, t2, t3, t4, t5 zamanlarının ortalama değerlerini hesaplayıp
t ortalama olarak kaydedin.
2=d/
yı hesaplayın. Bu arabanın iki ışık kapısı arasındaki hızıdır.
3- D ve t,
ve
grafiğini çizin.
Tablo 7.3 Veri ve Hesaplamalar
=
D
DENEY 8: DÖNME EYLEMSİZLİK DENEYLERİ
DİSK VE HALKANIN EYLEMSİZLİK MOMENTİ
Araçlar
-Hassaslık zamanlayıcı programı
-Kütle ve askı takımı
-Eylemsizlik momenti takımı
- Akıllı makara
- Cetvel
Amaç
Halka ve diskin eylemsizlik momentini deneysel olarak bulmak ve deneysel
olarak bulunan bu değerleri teorik değerleriyle kıyaslamak.
Teori
Teorik olarak bir halkanın merkezi etrafında eylemsizlik momenti
ifadesiyle verilir. Burada M halkanın kütlesi, R1 halkanın iç yarıçapı ve R2 halkanın
dış yarıçapıdır.
Şekil 8.1 Halka
Bir diskin merkezi etrafında eylemsizlik momenti
ifadesiyle verilir. Bu bağıntıda M diskin kütlesi ve R diskin yarıçapıdır. Bununla
beraber bir diskin çapı etrafında eylemsizlik momenti
şeklinde gösterilir. Eylemsizlik momentini deneysel olarak bulmak için cisme bilinen
bir moment uygulanır ve oluşan açısal ivme ölçülür. Moment
ifadesiyle
verildiği için eylemsizlik momenti
eşitliği ile gösterilir. Burada diskin açısal ivmesini göstermektedir ve değeri a/r dir.
Burada a ivme ve r ise diskin yarıçapıdır. , temeldeki makaraya sarılı ipe asılı
kütlenin ağırlığının neden olduğu momenttir.
bağıntısında r, ipin sarılı olduğu silindirin yarıçapını ve T, sistem dönerken ipte oluşan
gerilmeyi temsil eder.
Şekil 8.2
Asılı m kütlesi için Newton’un ikinci kanununu uygularsak
ifadesini elde ederiz.
Şekil 8.3
Bu denklemde T’yi çekersek
T=m(g-a)
bağıntısını elde ederiz. Eğer m kütlesinin çizgisel ivmesini tespit edersek eylemsizlik
momentini hesaplamak için moment ve açısal ivmeyi bulabiliriz.
Deneyin Kuruluşu
1. Şekil 8.4’te gösterildiği gibi merkez eksene diski yerleştirin. Diskin halka
girmesi için hazırlanmış oluklu kısmının üste gelmesine dikkat edin.
2. Oluğa tam oturacak şekilde halkayı diskin üzerine koyun.
3. Akıllı makarayı temele takıp bilgisayara bağlayın.
4. Akıllı makara programını çalıştırın.
Şekil 8.4
Yapılacak İşlemler
Teorik Eylemsizlik Momentinin Hesabı
1. Halka ve diski tartıp kütlelerini Tablo 8.1’e kaydedin.
2. Halkanın iç ve dış çaplarını ölçüp R1 ve R2’yi hesaplayın. Sonuçları Tablo 8.1’e
kaydedin.
3. Diskin çapını ölçüp yarıçap R değerini Tablo 8.1’e kaydedin.
Tablo 8.1 Teorik Eylemsizlik Momenti
Halkanın Kütlesi
Diskin Kütlesi
Halkanın İç Yarıçapı
Halkanın Dış Yarıçapı
Diskin Yarıçapı
Deneysel Metot İçin Ölçümler
Deneysel olarak eylemsizlik momentini bulmaya yarayan teori sürtünmeyi
hesaba katmamaktadır. Dolayısıyla kinetik sürtünmeye karşılık makaraya kütle
asacağız. Kütlenin tam kinetik sürtünmeye karşılık geldiğini kütlenin sabit hızla
düşüşünden anlayabiliriz. Sonradan bu sürtünme kütlesini sistemi ivmelendiren
kütleden çıkaracağız.
1. Kinetik sürtünmenin üstesinden gelecek kütleyi bulmak için “Display
Velocity(Hızı
göster)”
sekmesini
çalıştırın:<V>-Display
Velocity
<ENTER>;<A>-Smart
Pulley/Linear
String(Akıllı
Makara/Lineer
Tel)
<ENTER>; <N>-Normal Display (Normal Gösterim) <ENTER>.
2. Asılı kütlenin hızı üç önemli basamağa kadar sabit olacak biçimde makaraya
kütle asın. Sonra <ENTER>a basarak hız gösterimini durdurun. Bulunan bu
sürtünme kütlesini Tablo 8.2’ye kaydedin.
Tablo 8.2 Eylemsizlik Momenti Verileri
Halka ve disk bir
arada
Disk yalnız yatay
Disk yalnız dikey
Sürtünme kütlesi
Asılı kütle
Eğim
Yarıçap
Halka ve Diskin İvmesinin Bulunuşu
1. İvmeyi bulmak için makaraya 50 gram civarında kütle asın (Astığınız kütleyi
Tablo 8.2’deki asılı kütle kısmına tam olarak kaydedin). “Motion
Timer”(Hareket zamanlayıcı) sekmesini ENTER tuşuna basarak çalıştırın. İpi
iyice sarıp kütleyi masadan yere doğru serbest düşmeye bırakın. Kütle yere
değmeden az önce ENTER tuşuna basın.
2. Bilgisayar zamanları hesaplayıncaya kadar bekleyin ve sonra ENTER tuşuna
basın. İvmeyi belirlemek için hız-zaman grafiğini çizin: <G>.-Graph Data
(Veriyi Çiz) <ENTER>;<A>-Smart Pulley/Linear String (Akıllı Makara/Doğrusal
Tel) <ENTER>;<V>-Velocity vs. Time (Hıza karşı Zaman) <R>-Linear
Regression (Doğrusal Regresyon) <SPACEBAR>(Aktif konuma getirir) <S>Statistics (İstatistikler) <SPACEBAR><ENTER>.
3. Şimdi grafik görüntülenecek ve eğim grafiğin üst kısmında verilecektir. Bu
eğim ivmeye eşittir. Main Menu (Ana Menü) ye dönmek için bir kez <ENTER>,
iki kez de <X>e basın.
Yarıçap Ölçümü
Cetveli kullanarak ipin sarılı olduğu silindirin çapını ölçün ve yarıçapını
hesaplayın. Bu değerleri Tablo 8.2’ye kaydedin.
Diskin Yalnız Başına İvmesinin Bulunuşu
Daha önce disk halka ile birlikte dönmekteydi. Halkanın eylemsizlik momentini
hesaplamak için toplamdan çıkarmak üzere yalnız diskin eylemsizlik momentini
bulmamız gereklidir. Bunun için halkayı diskin üzerinden alarak “Halka ve Diskin
İvmesinin Bulunuşu” bölümünü tekrarlayın.
NOT: Halka diskin üzerinden alındığı için yeni kinetik sürtünmeyi yenmek için daha
az “sürtünme kütlesi” gereklidir. Bundan dolayı 30 gram kütle yeterlidir.
Diskin Çap Ekseni Etrafında Dönüşü
Diski merkez eksenden ayırıp dikey konuma getirin. Diskin iki tarafında bulunan D
şeklindeki deliklerden biri üzerinde merkez eksene tekrar yerleştirin (Şekil 8.5).
“Yarıçap Ölçümü” ve “Diskin Yalnız Başına İvmesinin Bulunuşu” adımlarını disk bu
konumda iken tekrarlayın ve veriyi Tablo 8.2’ye kaydedin.
Şekil 8.5
Hesaplamalar
Aşağıdaki hesaplamaları yaparak sonuçları Tablo 8.3’e kaydedin.
1. Denklemlerde kullanılacak m kütlesini bulmak için sistemi ivmelendiren asılı
kütleden “sürtünme kütlesini” çıkarın.
2. Halka ve diskin beraber eylemsizlik momentini hesaplayın.
3. Yalnız diskin eylemsizlik momentini hesaplayın.
4. Halka ve diskin toplam eylemsizlik momentinden diskin eylemsizlik momentini
çıkarın. Bu halkanın eylemsizlik momentini verecektir.
5. Diskin çapı etrafında eylemsizlik momentini hesaplayın.
6. Halkanın eylemsizlik momentini teorik olarak hesaplayın.
7. Diskin ağırlık merkezi ve çapı etrafında eylemsizlik momentini teorik olarak
hesaplayın.
8. Deneysel değerleri ve teorik değerleri karşılaştırmak için yüzdelik farkı
kullanın.
Tablo 8.3 Sonuçlar
Deneysel
Eylemsizlik Momenti
Disk ve Halka
Beraber
Yalnız Disk (Yatay)
Yalnız Disk (Dikey)
Yalnız Halka
Teorik Eylemsizlik
Momenti
Yüzde Hata
DENEY 9: AÇISAL MOMENTUMUN KORUNUMU
ARAÇLAR
-Akıllı Makara Zamanlayıcı Programı
-Terazi
-Eylemsizlik Momenti Seti
- Dönen Tabla
-Akıllı Makara Fotokapısı
Amaç
Dönen bir diskin üzerine başlangıçta dönmeyen bir halka bırakıldığında diskin
ve halkanın oluşturduğu sistemin son açısal hızının, çarpışmadan önceki ve sonraki
açısal momentumun korunumunun kullanılarak hesaplanması.
Teori
Dönen diskin üzerine halka bırakılınca sisteme etki eden net moment sıfırdır.
Çünkü halka üzerindeki moment diskin üzerindeki momente eşit ve zıt yönlüdür.
Dolayısıyla, açısal momentumda bir değişme olmaz. Açısal momentum korunur.
Bu bağıntıda
ilk eylemsizlik momenti ve
ilk açısal hızdır. Diskin ilk eylemsizlik
momenti
dir. Halka ve disk sisteminin son eylemsizlik momentin
dolayısıyla son açısal hız
ifadesiyle verilir.
Deneyin Kuruluşu
1- Şekil 9.1’de gösterildiği gibi Eylemsizlik Momenti Seti’ni kurun. Diski oluklu
kısmı üst tarafa gelecek şekilde yerleştirin.
2- Siyah çubuk yardımıyla Akıllı Makara Fotokapısı’nı temele yerleştirin ve öyle
ayarlayın ki fotokopi merkez eksendeki makaranın deliklerini görebilsin.
3- Akıllı Makara Zamanlayıcı programını çalıştırın.
Şekil 9.1 Halkayı Diskin Üzerine Koymak İçin Deney Seti
Yapılacak İşlem
1- M Motion Timer (Hareket Zamanlayıcı)’ı seçin.
2- Halkayı diskin 1cm kadar üzerinde tutun. Diski bir elinizle çevirin. 10 s sonra kadar
halkayı diskin üzerine bırakın. Şekil 9.2’ye bakın.
Şekil 9.2 Deney Seti
3- Çarpışmadan sonra veri almaya devam edin ve sonra ENTER’a basın.
4- Bilgisayar zamanları hesaplandıktan sonra, açısal hız-zaman grafiğini çizdirin. A
Data Analysis Options (Veri Analiz Seçenekleri) ENTER ; G Graph Data (Veriyi
Çiz) ENTER ; E Rotational Apparatus (Dönme Cihazı) ENTER ; V Velocity
vs. Time (Hıza Karşı Zaman) ENTER.
5- Grafiği gördükten sonra ENTER’a basın ve açısal hızlar tablosunu görmek için
T’ye basın. Çarpışmadan az önceki ve az sonraki açısal hızı belirleyin. Bu değeri
Tablo 9.1’e kaydedin.
6- Disk ve halkayı tartın. Yarıçaplarını ölçün. Bu değeri Tablo 9.1’e kaydedin.
Analiz
1- Son açısal hızın beklenen (teorik) değerini hesaplayıp Tablo 9.1’e kaydedin.
2- Son açısal hızın teorik ve deneysel değerini kıyaslamak için yüzdelik fark
kullanın ve Tablo 9.1’e kaydedin.
Tablo 9.1 Veriler ve Sonuçlar
Başlangıç açısal hız
Son açısal hız (Deneysel değer)
Diskin kütlesi
Halkanın kütlesi
Halkanın iç yarıçapı
Halkanın dış yarıçapı
Diskin yarıçapı
Son açısal hız (teorik değer)
Yüzdelik fark