ANAHTARLANMIŞ SİSTEMLERİN
ÇÖZÜMLERİNİN BİLGİSAYAR YARDIMIYLA
İNCELENMESİ
Yrd. Doç. Neslihan Serap ŞENGÖR
Araş. Gör. Özkan KARABACAK
HAZIRLAYANLAR:
Ali Hilmi UYSAL
Çağdaş ÖZTÜRK
Fatma TUNÇER
Kadir COŞKUN
Kerem Yücel ERDEN
040030409
040030456
040040344
040030421
040040382
ANAHTARLANMIŞ SİSTEMLERİN ÇÖZÜMLERİNİN BİLGİSAYAR
YARDIMIYLA İNCELENMESİ
Anahtarlanmış sistemler, kontrol teorisinden bilgisayar bilimlerine kadar birçok uygulama ve
araştırma alanına sahip sistemlerdir. Anahtarlanmış sistemler genel bir ifadeyle bir grup
altsistem ve bu altsistemlerin etkileşiminde kullanılan anahtarlama işaretleri kümesinden
oluşmaktadır. Burada bahsedilen altsistemleri farklı zaman dilimlerinde veya durum uzayının
farklı bölgelerinde bulunan sistemler olarak tanımlayabiliriz. Anahtarlama işlemi ise bu farklı
altsistemlerin birbirleri arasındaki geçişleri sağlamaktadır. Bu altsistemlerin herbirinin
doğrusal olması durumunda sistem anahtarlanmış doğrusal sistem olarak tanımlanmaktadır.
Anahtarlanmış sistemlere kafamızda fiziksel bir takım anlamlar oluşması amacıyla şu şekilde
açıklayabiliriz:
Herhangi bir kapıyı bir sistem, kapının kapalı olması durumunu ve açık olması durumunu
farklı zamanlarda bulunan iki alt sistem ve anahtarlama işaretimizi de fiziksel anahtar olarak
düşünebiliriz. T zamanına kadar kapının kapalı olduğu varsayımını yapalım. T zamanında
anahtarı kullanarak kapıyı açalım. T zamanından sonra sistem farklı bir altsistem olan kapının
açık olması durumunda kalacaktır. Görüldüğü gibi anahtar işareti farklı altsistemlerde geçişi
sağlamış ve farklı zaman dilimlerinde farklı sistemlerin çalıştırılabilmesine olanak
sağlamıştır.
Anahtarlanmış sistemlerin daha iyi anlaşılması amacıyla aşağıda bulunan konuların
tanımlarının yapılması uygun bulunmuştur:
Dinamik Devre
Denge Noktası
Kararlılık
Özdeğer ve Özvektör
Jordan Kanonik Form
Yakınlık Metrik Tanımı
Dinamik Devre
Lineer zamanla değişmeyen bir devrede elemanlardan en az bir tanesi endüktans, kapasite gibi
enerji depolayan eleman ise o devreye lineer zamanla değişmeyen dinamik devre denir.
Denge Noktası
Durum denklemleri ile ilgilenirken bilmemiz gereken önemli kavramlardan bir tanesi denge
noktası tanımıdır.Lineer zamanla değişmeyen ve
bağıntısıyla ifade edilen bir sistemin denge noktaları
eşitliğinin reel kökleridir.
Denge noktası ayrık olmalıdır (yani denge noktası civarında başka denge noktaları
bulunmamalıdır) veya denge noktası civarında denge noktalarının sürekli dizisi bulunmalıdır.
Kararlılık
Aşağıdaki durum denklemleri ile ifade edilen dinamik bir sistemi ele alalım;
Bu denklemlerde x ve y birer vektörü A, B, C, D ise birer matrisi ifade etmektedir.Bu dinamik
sistemdeki bütün bağımsız kaynakları devreden çıkaralım; yani sistemin elektrik devresi
olması halinde, bağımsız gerilim kaynaklarını kısa devre ve bağımsız akım kaynaklarını açık
devre tutalım. Bu durumda u=0 olmaktadır. Böylece sistemi ilk koşulları yani başlangıç
enerjisi ile kendi haline bırakmış oluruz.
Bu durumda çözümümüzü şu şekilde ifade edebiliriz;
Bu denklemde x0 ilk koşuldur ve
lineer zamanla değişmeyen sürekli sistemler için eAt olmaktadır.
“ t “ sonsuza giderken, durum değişkeninin genliği sonlu kalıyorsa, dinamik devreye kararlı,
aksi halde kararsız dinamik devre denir.
Yukardaki denklemle tanımlı bir sistemimiz olsun.
x=0
denge noktasında sistemimiz kararlıdır; ancak ve ancak
ε>0
için
öyle bir δ=δ(ε)>0 fonksiyonu olsun ki ;
||x(0)||<δ
ise ||x(t)||<ε,
Kararlı değilse kararsızdır.
Sistem kararlı ve
||x(0)||<δ ise
Sistem aynı zamanda asimptotik kararlıdır.
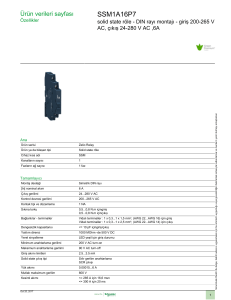
Basit bir örnekle anlatmak gerekirse
koşuluna uyan bir δ varsa
Şekil 1: Örnek devre
Devreye ilişkin durum denklemi;
Çözüm;
R > 0 ise sistem asimptotik kararlıdır.
R = ∞ ise sistem kararlıdır (ama asimptotik kararlı değildir) (açık devre)
R < 0 ise sistem kararsızdır.
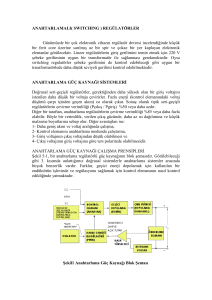
2 boyutlu bir A matrisi Lineer bir sistemin durum matrisi olsun. Aşağıda görülen faz
portresinin 0 a yakınsadığı görülmektedir. t sonsuza giderken x1 durum değişkeni de x2
durum değişkeni de 0 a gitmektedir. Bu da bize sistemin Asimptotik kararlı olduğunu gösterir.
Şekil 2: Asimptotik kararlı bir sistemin yörüngesi
Matrisin Özdeğerleri ve Özvektörleri
A = (aij) bir nxn’lik matris, x ve b birer nx1’lik sütun vektör olmak üzere
Ax = b
Denkleminin özel bir hali olan
Ax = λx (λ skalar)
(*)
Denklemin çözümünü araştırmak, birçok uygulamada ortaya çıkmaktadır.
Bu denklem
(A - λI)x = 0
(**)
şeklinde de yazılabilir.(*) ve (**) denklemlerinin sıfırdan farklı çözümünün olması için gerek
ve yeter koşul
p( ) = det(A - λI) = 0
koşulunu sağlayacak λ’yi veya λ’leri bulmaktadır.Son yazdığımız denklemi sağlayan λ
değerlerine A matrisinin özdeğerleri denir. Bu λ değerini Ax = λx veya (A - λI)x = 0
da yerine koyarak elde edilen 0 dan farklı çözümlere, A matrisinin bu özdeğerine karşı gelen
özvektör adı verilir.
Anahtarlanmış doğrusal sistemler
Giriş kısmında bahsedildiği gibi anahtarlanmış sistemlerdeki alt sistemlerin herbirinin
doğrusal olması durumuna anahtarlanmış alt sistemler denilmektedir. Bu projede tamamen
anahtarlanmış doğrusal sistemlere yer verilmiştir. Anahtarlamış doğrusal sistemlerin tanımı şu
şekilde verilebilir:
P bir indeks kümesi olmak üzere bir
f
p
, p P R n ’den
n
’e fonksiyonlar ailesi verilmiş
olsun. Parça parça sabit ve sonlu zaman aralıklarında sonlu sayıda süreksizlik içeren
: 0, P anahtarlama işaretlerinden oluşan bir S kümesi verilmiş olsun.
x t f x t , S , t 0
şeklinde tanımlanan sisteme anahtarlanmış sistem denir.
Burada f p , p P ’yi altsistemler ailesi, bu ailenin her bir üyesini altsistem ve S kümesini
anahtarlama işaretleri kümesi olarak adlandırılmıştır. Bu tanıma göre bir altsistemler ailesi ve
bir anahtarlama işaretleri kümesi bir anahtarlanmış sistem tanımlar. Altsistemler ailesinin her
bir üyesinin doğrusal olması durumunda oluşan sisteme ise anahtarlanmış doğrusal sistem
denir.
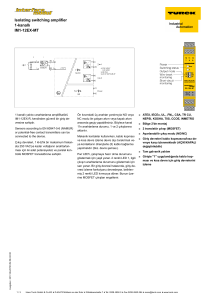
Aşağıda anahtarlama işaretine verilecek bir örnek görüyoruz. Anahtarlama işaretimiz zaman
domeninden indis domenine olduğu için grafiğin yatay ekseninde zaman, düşey ekseninde ise
indis görüyoruz. Grafikte 4 farklı indiste değer alan bir anahtar işareti bulunuyor. Projemizi
gerçekleştirirken bu anahtarlama işaretlerinin bekleme sürelerini (indis ekseninde sabit
kaldıkları minimum süre) belli bir değerin üzerinde tutma kuralı koyarak anahtarlama
işaretlerimizi sınırlayacağız.
Şekil 3: Bir anahtarlama işareti [1]
Mühendislikte çok önemli yere sahip olan kararlılık problemi anahtarlanmış sistemlerde de
karşımıza çıkmaktadır. Genel olarak anahtarlanmış sistemlerin kararlılığıyla ilgili üç problem
üzerinde durulmaktadır. Bu problemler aşağıda açıklamalarıyla birlikte verilmiştir.
Keyfi Anahtarlama Problemi:
Birçok sistemde anahtarlama düzeneği çok yüksek hızlarda çalışır. Bu nedenle keyfi
anahtarlama durumunda sistemin kararlılığını koruması önem kazanmaktadır. Bu problemi
aşmak için sisteme uygulanan bütün anahtarlama işaretlerinin kararlılığı incelenir. Bu
inceleme sonucunda herbir altsistemin kararlı olması gerektiği görülür. Bu nedenle bu
problem kapsamında kararlı altsistemlerden oluşan hangi ailelerin keyfi anahtarlama altında
kararlı olacağı incelenir.
Bu konu dahilinde kararlı altsistemler, anahtarlama işareti uygulandıktan sonra kararlı veya
kararsız olabilmektedir. Bu projede bu durumlar bilgisayar yardımıyla incelenerek, kararlı iki
altsistemden kararlı ve kararsız sistemler elde edilmeye çalışılmıştır.
Kararlılaştırma Problemi
Verilen her bir altsistem için anahtarlanmış sistemi kararlı kılan anahtarlama işaretlerinin
bulunması kararlılaştırma problemini oluşturmaktadır. Yapılan araştırmalarda bu problem
kapsamındaki altsistemlerin kararsız olduğu varsayılmıştır.
Anlaşıldığı gibi bu problem dahilinde kararsız altsistemler kullanılarak, uygun anahtarlama
işareti uygulandığında kararsız altsistemler kararlı hale getirilebilmektedir. Bu sebeple
projede bu konu üzerinde durulmuş ve bilgisayar yardımıyla iki kararsız altsistemin, uygun
anahtarlama işaretleri yardımıyla kararlı olması sağlanmıştır.
Uygun Anahtarlama İşaretleri Kümesini Bulma Problemi
Tüm anahtarlama işaretleri için olmasa da belli bir takım özellikleri sağlayan anahtarlama
işaretleri için kararlı olan altsistemlerin varolabileceği görülmüştür. Bu durumda verilmiş bir
altsistemler ailesi için hangi anahtarlama işaretleri kümelerinin bir kararlı alt sistem
oluşturacağı problemi ile ilgilenilmiştir. Bu problemde her bir altsistemin kararlı olduğu kabul
edilmektedir. Projede bu konunun incelenmesi amacayla bazı kavramların hatırlatması
yapılmıştır.
Jordan Kanonik Form
Jordan kanonik Formu projemizde ne amaçla kullanacağımızdan bahsetmeden önce ne
olduğunu kısaca açıklayalım.
Elmizde bir A matrisi var. Bu matrisin köşegenleştirilebilir bir matris olmasını istiyoruz.
Bunu sağlamak için bu matrise ait özvektörlerin lineer bağımsız olmasını isteriz.
Özvektörlerin lineer bağımsızlığını sağlamak içinse özdeğerlerin birbirinden farklı olması
gerekmektedir.
Bu durumda
A V= V D
Denkleminin her iki tarafını sağdan V-1 ile çarptığımızda A yalnız başına kalacaktır:
A = V D V-1
Bu denklemde görülen V özvektörleri D ise özdeğerlerden oluşan köşegen matrisi ifade
etmektedir.
İşte bu form Jordan kanonik fromu olarak adlandırılmaktadır. Unutmamalıyız ki V
vektörünün tersinin alınabilmesi için sütunlarının lineer bağımsız olması gerekmektedir.
Bu formu projemizde kullanma amacımıza gelince:
Özvektörleri kendimiz belirleyeceğiz. Farklı özvektörler için farklı matrisler oluşacak.
Özvektörleri birbirine yakın seçtiğimizde matrislerde birbirlerine yakın olacak. O zaman bu
iki matrisi anahtarladığımızda kararlılık elde etmemiz daha kolay olacak. Aşağıda verilen
örnekte özvektörleri birbirine yakın altsistemlerin kararlı olduğu görülmektedir.
1 5
3 1
ve A 2
A1
olmak üzere
1 2
6 1
Bu altsistemler için min1 0.5617 , min 2 0.5093 ve bekleme 0.5617 bulunur. Aşağıda bu
sistemin çözümü görülmektedir.
4
3
x
2
2
1
0
-1
-2
-2
-1
0
1
2
3
4
5
6
7
x1
Noktalı ve düz çizgiler sırasıyla birinci ve ikinci altsistemin çalıştığı durumları
göstermektedir.
Yakınlık Metrik Tanımı: [4]
X bir küme olsun.
X Rn
d : XxX R
Her x, y, z
X için aşağıdaki koşullar sağlanmalıdır.
d ( x, y ) 0
d ( x, y ) 0 x y
d ( x, y ) d ( y , x )
d(x, z) d(x, y) d(y, z)
MATLAB da yapacaklarımız.
Rasgele anahtarlama işareti üretmek.
Verilecek iki sistemin anahtarlanmadan önceki ve anahtarlamadan sonraki durum
portrelerinin incelenmesi. Böylece iki kararlı sistemin anahtarlanması ile kararlı veya
kararsız bir sistem üretilebileceği.
Jordan Kanonik Formu kullanarak özdeğer ve özvektörleri bilinen bir sistemin A
matrisinin elde edilmesi. Özvektörleri değişen sistemlerde oluşan değişimlerin
gözlemlenmesi.
Rasgele anahtarlama işareti kullanmak yerine anahtarlamanın bekleme süresinin
kullanıcı tarafından klavye yardımıyla belirlenmesi.
KAYNAKLAR
[1] Karabacak, Ö., 2007. Anahtarlanmış Doğrusal Sistemlerin Kararlılığının İncelenmesi
Yüksek Lisans Tezi, İstanbul
[2] Sun, Z. ve Ge S.S., 2005. Switched Linear Systems: Control and Design, Springer-Verlag
London, USA.
[3] Khalil, H.K., 2000. Nonlinear Systems 3. ed., Prentice-Hall, New Jersey.
[4] Metric (mathematics). (n.d.). Retrieved February 14, 2006 from
http://en.wikipedia.org/wiki/Metric_%28mathematics%29