22,6
22,5
22,4
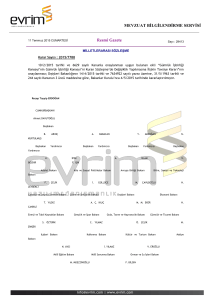
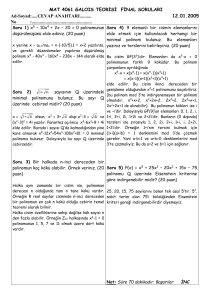
7) İNTERPOLASYON
Sıcaklık (0C)
y = 0,1039Ln(x) + 22,01
22,3
istatistiksel veriler
f(x)
Nüfus
22,2
22,1
10 Milyon
8 Milyon
22
İnterpolasyon, eldeki verilerin dağılımından
yararlanarak, elde olmayan bir değerin tahmin
edilmesi olarak özetlenebilir.
?
6 Milyon
21,9
0
10
20
30
40
50
60
Zaman (dk)
4 Milyon
1945
1950
1955
1960
1965
x ( yıllar)
70
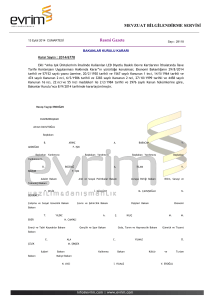
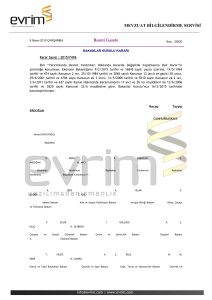
İnterpolasyon ve eğri uydurma
Armatür
Giriş
Sistem
Çıkış
Ra
Va
x
La
ia
x
Vb
y
y=f(x)
Rf
Lf
+
y1
x2
y2
x3
y3
x4
y4
x5
y5
x6
y6
w,
y
if (t)
Alan Akımı
-
x1
Armatür Akımı
Yük
J=Eylemsizlik
b=sürtünme
Sistem veya fonksiyonun karakteristiğini
betimleyen bir polinom elde edilir
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
y=P(x)=2x3-9x2+x+10
2
İnterpolasyon-eğri uydurma?
Ne fark var?
f(x)
---------Doğrusal İnterpolasyon
Eğri Uydurma
x
Şekil.7.1. İnterpolasyon ve Eğri Uydurma Grafikleri
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
3
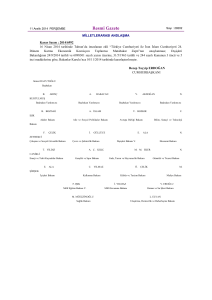
7.1. Doğrusal İnterpolasyon
Koordinatları (x1,y1), (x2,y2) olarak verilen iki noktadan bir
doğru geçer ve denklemi;
x x1
y y1
x 2 x1 y 2 y1
y
x x 2
x x1
y1
y2
x1 x2
x2 x1
Örnek: Verilen noktalardan geçen fonksiyonu bulunuz.
x1=0, x2=1, y1=3, y2=5
x
f(x)
0
3
x 1 3 x 0 5 =2x+3
y
1
5
0 1 1 0
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
4
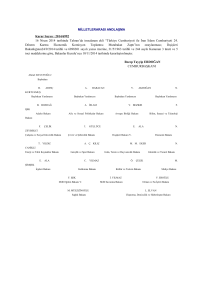
7.2. Lagrange Polinom İnterpolasyonu
Şekil.7.2. N noktadan N-1. dereceden bir polinom geçebilir
Lagrange interpolasyon formülü, N noktadan geçen N-1
dereceli polinomu tanımlayan bir teoremle verilir.
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
5
Teorem: Lagrange İnterpolasyon
Polinomu
Koordinatları (x1,y1),(x2,y2),.......(xN , yN) olan noktalar, derecesi en
fazla N-1 olan,
N
P(x)=L1(x) y1+ L2(x) y2+...................... LN(x) yN = Lk ( x) y k
k 1
tanımlar
Lk(x)=
N
x xi
x x1 x x2 x x3 .............x x N
=
xk x1 xk x2 xk x3 .............xk x N i 1 x k xi
ik
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
6
Örnek: Üçüncü dereceden bir polinomu ele alalım. Polinomun belirli
noktalarda aldığı değerler aşağıdaki gibi olsun. Bu polinomu
bulalım.
x=
P(x)=
Çözüm:
0
10
1
4
2
-8
3
-14
L1(x)=
x 1x 2x 3x 4 = x 4 10 x 3 35x 2 50 x 24
24
0 10 20 30 4
L2(x)=
x 0x 2x 3x 4 = - x 4 9 x 3 26 x 2 24 x
6
1 01 21 31 4
L3(x)=
x 0x 1x 3x 4 =
2 02 12 32 4
L4(x)=
x 0x 1x 2x 4 = - x 4 7 x 3 14 x 2 8 x
6
3 03 13 23 4
L5(x)=
x 0x 1x 2x 3 =
4 04 14 24 3
4
-2
x 4 8 x 3 19 x 2 12 x
4
x 4 6 x 3 11x 2 6 x
24
P(x)=10L1(x)+4 L2(x)-8 L3(x)-14 L4(x)-2 L5(x)
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
P(x)=2x3-9x2+x+10
7
Ödev: x,y=[(0,-5), (1,-1), (2,67), (3,379), (4,1235)]
a) Noktalarından geçen polinomu Lagrange interpolasyon yöntemiyle bulun.
(P(x)=a xn+ b xn-1+….c) gibi tek polinom olacak şekilde sadeleştirin.
b) x=5 için polinomun değerini bulun. Lagrange interpolasyon yöntemiyle
yukarıda verilen noktalara ait polinomun x=5’teki değerini hesaplayan
algoritmayı oluşturun ve programını yazın.
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
8
Örnek: Bir trigonometrik işlevi ele alalım. sin30o=0.5, sin450=0.7071,
sin600=0.8660 olduğu bilinmektedir. Bu durumda sin370 ve sin400
değerlerini Lagrange interpolasyon yöntemiyle bulun.
Çözüm: y1=0.5, y2=0.7071, y3=0.8660 ve x1=30, x2=45, x3=60 olduğuna göre x=37 için Lk
polinomlarını bulalım.
3
L1=
i 1
i 1
3
L2=
i 1
i2
3
L3=
i 1
i 3
x x i x x 2 x x3 37 4537 60
=
=0.4088
x1 x i x1 x 2 x1 x3 30 4530 60
x x i x x1 x x3 37 3037 60
=
=0.7155
x 2 x i x 2 x1 x 2 x3 45 3045 60
x x i x x1 x x 2 37 3037 45
=
= -0.1244
x 3 x i x3 x1 x3 x 2 60 3060 45
P(x)=x3+……
Buradan interpolasyon polinomu;
P(37)=L1 y1+L2 y2+L3 y3=0.4088*0.5+0.7155*0.7071-0.1244*0.8660=0.6026
Sin37’nin gerçek değeri, 0.6016’dır. Bulunan sonuç,
sadece 3 noktadan alınan örnek için iyi bir yaklaştırmadır.
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
9
Şimdi aynı 3 değerden sin400’nin değerini 6 basamak duyarlılıkla bulalım.
L1=
40 4540 60 =0.222222
30 4530 60
L2=
L3=
40 3040 45 =-0.111111
60 3060 45
ve istenen değer,
40 3040 60 =0.888888
45 3045 60
P(40)=0.222222*0.5+0.888888*0.707107-0.111111*0.866025
=0.643224 olacaktır.
Bulunan sonuç, Sin400= 0.642787 değerine oldukça yakındır.
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
10
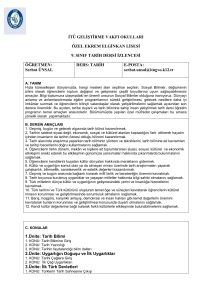
Bu örneği Matlab ile sayısal olarak çözmek için şu şekilde bir program hazırlanabilir
İlk Değerleri Ata
Elimizdeki x noktaları ve bunlara karşılık gelen y değerleri, polinomun aldığı değeri
bulacağımız x noktası, Toplam=0
H
P(x)=Toplam,
k=1
k 3?
k=k+1
N
( Lk ( x) y k )
E
k 1
Çarpım=1
E
H
i= 1
i=i+1
i k?
E
Çarpım*( x xi
Çarpım=
k kendisiyle
karşılaşırsa
x k xi
Star Wars, Lucas,G., 2005
i 3?
)
H
Lk(x)=Çarpım,
N
x xi
)
(
i 1 x k x i
ik
Toplam=Toplam+L(k)*y(k)
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
11
Lagrange İnterpolasyon probleminin çözümü için hazırlanan program
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
12
Kaynaklar
Sayısal Çözümleme, TAPRAMAZ,R., Literatür Yayınları
Advanced Engineering Mathematics, Kreyszig,E.
Nümerik Analiz, UZUN,İ, Beta Yayınları
Serhat YILMAZ, Kocaeli Üniversitesi, Elektronik
ve Haberleşme Bölümü
13