MEHMET SONER ERUL
RADYOTERAPİ TEKNİKERİ
ANKARA DR.ABDURRAHMAN YURTASLAN ONKOLOJİ EĞİTİM ve
ARAŞTIRMA HASTANESİ
‐Cyberknife robotik radyocerrahi sistem ‐Görüntü eşliğinde radyoterapi (IGRT)
‐Gelişmiş IGRT tekniği ile sürekli hasta hareketi ve tümör takibi yapabilme ‐Tümör maksimum doz
‐Riskli organ ve sağlam doku minumum doz
‐1 mm altında hata ile çalışma
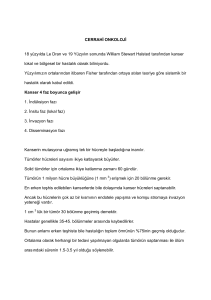
CYBERKNİFE ROBOTİK
RADYOCERRAHİ SİSTEMİ BİLEŞENLERİ
LINAC
X-IŞIN TÜ
TÜPÜ
XCHANGE
KOLİ
KOLİMATÖ
MATÖR
MASASI
TEDAVİ
TEDAVİ
MANİ
MANİPÜLATÖ
LATÖRÜ
TEDAVİ
TEDAVİ
MASASI
GÖRÜNTÜ
NTÜ
DEDEKTÖ
DEDEKTÖRLERİ
RLERİ
Robot ve Doğrusal Hızlandırıcı :
-6 MV enerji
-6 kollu sanayi robotu
‐600‐800‐1000 MU/dk yüksek doz hızı
‐Kompak yapı
‐Her doğrultuda yüksek hassasiyette robot hareketi (0.12 mm hassasiyet) ‐Uzayda tanımlı 200 noktadan 1200 yaklaşım olasılığı ve 6000 ayrı ışın doğrultusu
KOLİMATÖRLER VE DEĞİŞİM MASASI
– 5 mm, 7.5 mm, 10 mm, 12.5 mm, 15 mm, 20 mm, 25 mm, 30 mm, 35 mm, 40 mm, 50 mm ve 60 mm’lik 12 silindirik kon şeklinde ikincil sabit kolimatörler. – Otomatik veya manuel kolimatör değişimi – IRIS değişken kolimatör
– Robotik masa ile 6 boyutlu hareket özelliği
– Synchorny kamerası yardımıyla solunum takibi
– Dual x‐ray kameralar yardımıyla 3 boyutlu IGRT
– Yüksek doz – Keskin doz düşüşleri – Kritik organlara ve normal dokulara minimum doz – Bir veya birkaç fraksiyonda tedavi – Cyberknife’a özel tümör bulma ve takip sistemleri – Set‐up ve tedavi sırasında doğru yerde olduğumuzdan kesin emin olmak için IGRT
CyberKnife’ın olmazsa olmazıdır. IGRT
-IGRT, tedavi sırasında sürekli görüntü rehberliği
ile organ hareketlerini de dikkate alarak hedef
tümörün ve normal dokuların geometrik
belirsizliklerin azaltılmasını sağlayan tedavi
tekniğidir.
- Bu teknikte 2 ya da 3 boyutlu olarak
görüntülerinin elde edilmesi, elde edilen
görüntülerin değerlendirilmesi sonucunda
tedavinin doğruluğu ve hassasiyeti için gerekli
girişimde bulunulur.
®
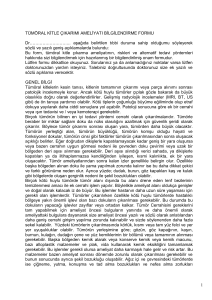
CYBERKNIFE ve IGRT
X-ışın Kaynakları
Doğrusal
Hızlandırıcı
ROBOTİK
UYGULAMA
SİSTEMİ
GÖRÜNTÜLEME
SİSTEMİ
Robot Kolu
Hedefleme Yazılım
Görüntü
Dedektörleri
Tümörün bulunduğu yere, büyüklüğüne ve solunum ile hareketine göre tümör(hedef) bulma ve takip yöntemleri
— 6D Skull
— Xsight Spine
— Xsight Lung
— Fiducial
— Syncrony
— Seçilen takip yöntemine ve yerine göre uygun hasta yatış pozisyonu
— Uygun çekim mesafesi ve görüntü
aralığı (6D skull için anterior ve superiorda 1 cm boşluk, diğerleri için tümörden en az 10 cm aşağı
ve yukarı) — Uygun hasta sabitleme sistemleri (kol, bacak, omurga pozisyonu) — Uygun CT çekim parametreleri (max 1.5 mm CT kalınlığı, kVp ~120 ve mAs>400, pitch 1)
— 6D Kafatası İzleme yöntemi stereotaktik çerçevelere ihtiyaç
duyulmaksızın intrakraniyal hedeflerin (ve C2+C3) izlenebilmesini sağlar
— Termoplastik maske kullanılır
— 6D Kafatası İzleme yöntemi, gerçek zamanlı X ışını görüntüleri ve referans DRR görüntülerinin arasındaki sapmaları hesaplayarak kafatasının iskelet özelliklerinin belirlenmesi ve eşleştirilmesi yoluyla çalışır
— Hedefin izlenmesi, hedef hacimle bu iskelet özellikleri arasındaki sabit ilişkiye dayalıdır.
— Planlamadan gelen DRR (digitally reconstruction radiographs) görüntülerini referans alır. — Anlık alınan iki radyolojik görüntüyle DRR görüntüleri karşılaştırılır.
— Görsel ve izleme parametreler açısından karşılaştırıldığında 3 masa düzeltmeleri sistem doğrusal (x,y,z) 3 açısal (pitch, yaw, roll)tarafından otomatik olarak hesaplanır ve düzeltmeler otomatik olarak yapılır. — Hatalar limitler içine girene kadar bu işlem tekrarlanır. — Uygun görülürse tedavi başlar.
— Tedavi boyunca görüntü alınarak oluşan hatalar otomatik olarak düzeltilir.
0.98<Gain A-B<1.02
– Kemik yapıdaki sorunlar
– Opere hastalar
– Kemik erimesi
– Uygun çekilmeyen CT görüntüleri
– CT kalibrasyonu
– Hizalama merkezi (align merkezi) seçimindeki hatalar
– Xsight Spine İzleme yöntemi, hastanın doğru konumda tutulması amacıyla omurga bölgesindeki iskelet yapılarının izlenmesini sağlar. – Xsight Spine İzleme yöntemi, servikal, torasik ve lumbar omurga dahil, omurganın çoğu bölgesini doğru ve otomatik olarak izleyebilir. – Solunum takibi yapmamaktadır
– Omurga kemiklerinden yola çıkarak tümörün yerini kendi bulmakta ancak tümör kontrolü yapmamaktadır
— Planlamadan gelen DRR görüntülerini referans alır. — Anlık alınan iki radyolojik görüntüyle DRR görüntüleri karşılaştırılır.
— Mesh adı verilen 9x9(81 nokta) alan içinde kontrast farkında yola çıkarak doğru yere oturtturulması
sağlanır. – Görsel ve izleme parametreler açısından karşılaştırıldığında 3 doğrusal (x,y,z) 3 açısal (pitch, yaw, roll) masa düzeltmeleri sistem tarafından otomatik olarak hesaplanır ve düzeltmeler otomatik olarak yapılır.
– Görsel değerlendirme, iskelet yapısının algoritma tarafından doğru olarak izlenmesini sağlar. Bu, Xsight Spine İzleme Yöntemi kullanılarak gerçekleştirilecek güvenli tedavi uygulamasında esastır.
— Hatalar limitler içine girene kadar bu işlem tekrarlanır. — Uygun görülürse tedavi başlar.
— Tedavi boyunca omurga hareketli olduğundan görüntü alınarak oluşan hatalar otomatik olarak düzeltilir.
–
–
–
–
–
–
–
–
CT kalibrasyonundaki sorunlar
Önerilen CT parametreleri dışında çekim Hastanın yatışının CT çekimindeki ile farklı olması
Planlamada hizalama merkezinin yanlış seçimi
Mesh boyutunun yanlış ayarlanması
Omurgadaki aşırı bozukluk
Omurga deformasyonu
Aşırı şişman hastalar
– 6D Skull ve Xsight Spine izleme yöntemlerinin kullanılamadığı
durumlarda vücuda dışarıdan yerleştirilen Fiducial denilen işaretleyiciler yardımıyla hedef bulma ve takip yöntemidir.
– Yumuşak dokularda veya bozuk omurga yapılarında kullanılır. – DRR’leri ve gerçek zamanlı X ışını görüntülerini analiz ederek görüntüler arasında ilişki kurup fiducial konumlarını belirleyen bir fiducial ayırma algoritmasıdır. – Fiducial’ların 3 boyutlu konumlarından yola çıkarak tümörün yerini kendi bulmakta ancak tümör kontrolü yapmamaktadır
–
–
–
–
–
–
–
–
–
Altın veya çelikten yapılır. Çap 0,7 ‐ 1,2 mm
Uzunluk 3 – 6 mm
Tavsiye edilen: 4‐6 fiducial yerleştirilmeli
Rotasyon hareketleri için en az 3 tane gerekli CT çekimi en az 1 hafta sonra olmalı
CT çekimi ile tedaviye hemen başlanmalı
Aralarında en az 15 mm olmalı
Aralarındaki açı en az 15º olmalı
— Planlamadan gelen DRR görüntülerini referans alır. — Anlık alınan iki radyolojik görüntüyle DRR görüntüleri karşılaştırılır.
— Fiducialler görüntülerde tespit edilir.
– Görsel ve izleme parametreler açısından karşılaştırıldığında 3 doğrusal (x,y,z) 3 açısal (pitch, yaw, roll) masa düzeltmeleri sistem tarafından otomatik olarak hesaplanır ve düzeltmeler otomatik olarak yapılır.
— Hatalar limitler içine girene kadar bu işlem tekrarlanır. — Uygun görülürse tedavi başlar.
— Tedavi boyunca görüntü alınarak oluşan hatalar otomatik olarak düzeltilir.
– CT kalibrasyonundaki sorunlar
– Önerilen CT parametreleri dışında çekim – Hastanın yatışının CT çekimindeki ile faklı olması
– Fiducial yerleşimindeki yanlışlıklar
– Fiducial konumlarındaki oynamalar.
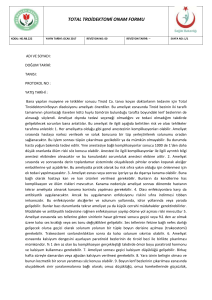
– Fiducial izleme yönteminin, synchrony solunum takip sistemini içinde bulunduran izleme yöntemidir. – Bütün aşamaları ile fiducial izleme yöntemiyle aynıdır. – Planlama aşamasında Synchrony İzleme Yöntemi seçilir.
– Tedavi uygulaması sırasında fiduciallerin doğru yerde olduğu doğrulandıktan sonra tedaviye geçmeden hastanın solunum almasını takip etmek için Synchrony modeli oluşturulur ve tedavi daha sonra başlar.
Fiducial izleme yöntemi ile Synchrony solunum takip sisteminin birlikte
çalışması
External position sensor
Internal fiducial
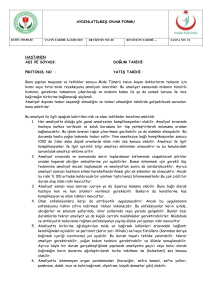
– Xsight Lung İzleme yöntemi, akciğerde fiducial işaretleyiciler kullanılmaksızın aşağıdaki koşulları sağlayan akciğer tümörlerini doğru ve otomatik olarak izleyebilir:
• Tüm yönlerde 15 mm’den büyük tümör çapı.
• Akciğerin periferal bölgesindeki tümör yerleşimi.
• Tümör konumu, görüntüleme geometrisindeki projeksiyon görüntülerinde iskelet yapılarınca tümüyle kapatılmamış.
– Xsight Lung İzleme yöntemi, hasta hizalandırmasını
gerçekleştirmek için Xsight Spine İzleme yöntemini kullanır. – Tedavi uygulaması sırasında Xsight
Lung İzleme Yöntemi, tümörün, hasta solunum biçimlerine bağlı
hareketinin izlenmesinde Synchrony
Solunum İzleme Sistemi ile birlikte kullanılır.
– Diğer izleme yöntemlerinden farklı
olarak hedef tümörün orada olup olmadığını kontrol eder.
— Planlamadan gelen DRR görüntülerini referans alır. — Anlık alınan iki radyolojik görüntüyle DRR görüntüleri karşılaştırılır.
— Mesh içinde kontrast farkından yola çıkarak doğru yere oturtturulması sağlanır. – Görsel ve izleme parametreler açısından karşılaştırıldığında 3 doğrusal ve 3 açısal masa düzeltmeleri sistem tarafından otomatik olarak hesaplanır ve düzeltmeler otomatik olarak yapılır.
– Hatalar limitler içine girene kadar bu işlem tekrarlanır. – Uygun görülürse «Go to
Xsight Lung» düğmesi ile tedavi masası tümörün olduğu yere otomatik kaydırılır.
– Ekran değişir ve tümörün bulunduğu DRR görüntüleri gelir. – Bu konumdayken yeniden gerçek zamanlı görüntü alınır. Planlamadan gelen ve tümörün bulunduğu ve görsel olarak tümörün görüldüğü DRR görüntüleri ile karşılaştırılır. – Görsel değerlendirme ve parametreler yardımıyla tümörün doğru yerde olduğuna bakılarak doğru yerde olunması sağlanır. – Solunum takibi yapmak için Synchrony modeli oluşturulur ve tedaviye başlanır.
– Tedavi boyunca görüntü alınarak oluşan hatalar otomatik olarak düzeltilir.
– Bu yöntem, Xsight Spine ve Synchrony izleme yöntemlerini içerdiğinden her iki yöntemde karşılaşılan zorluklarla bu yöntemde de karşılaşılmaktadır. – Uzun tedavi süresi
– CT çekim parametreleri – CT çekiminde hasta pozisyon BABAMI DİNLEDİĞİNİZ İÇİN
TEŞEKKÜRLER