Dijital Görüntü İşleme (JDF338)
Yrd. Doç. Dr. Saygın ABDİKAN
2015-2016 Öğretim Yılı Bahar Dönemi
1
Görüntü Zenginleştirme
Mekânsal Dönüşümler
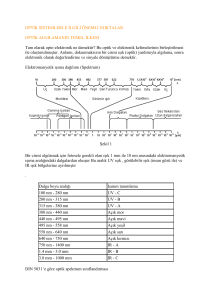
Mekânsal dönüşümler, uzaktan algılama görüntülerindeki
bilgiyi çıkartmak veya değiştirmek için uygulanırlar.
En yaygın dönüşüm uygulaması mekânsal filtrelemedir.
Mekânsal filtreleme yöntemleri görüntü içindeki bazı
özellikleri bu özelliklerin mekânsal frekanslarına dayanarak
vurgulamak veya yok etmek için kullanılır.
Mekânsal frekans, görüntünün belirli bir alanına ait yansıtım
değerlerindeki değişim oranına karşılık gelen doku bilgisiyle
belirlenir.
Değişim oranı fazla olan bir bölge “kaba” dokulu özellik
göstermekte olup yüksek mekânsal frekansa sahiptir.
2
Görüntü Zenginleştirme
Mekânsal Dönüşümler
Filtreleme görüntü üzerinde bir filtre
varmış gibi düşünüp her piksel değerinin
yeniden hesaplanmasıdır.
Filtreleme işleminin amaçları:
netleştirme
nokta yada çizgisel bozuklukları giderme
belirli ayrıntıları ortaya çıkarma
görüntüyü yumuşatma
kenar keskinleştirme veya
kenar bulma gibi işlemler gerçekleştirilir.
3
Görüntü Zenginleştirme
Mekânsal Dönüşümler
Her bir piksel için gezdirilen bu pencerenin ağırlık
değerleriyle eşleştirildiği lokal görüntü parlaklık değerleri
karşılıklı çarpılır ve bu çarpımlar toplanır. Elde edilen
sonuç pencere merkezindeki piksele yeni değer olarak
atanır.
Daha sonra bu pencere satır veya sütün yönünde 1 piksel
ötelenir. Bu öteleme ve aritmetik işlemlerin bütününe
“konvolüsyon” denir.
4
Görüntü Zenginleştirme
Mekânsal Dönüşümler
Pencerenin ağırlık değerleri değiştirilerek görüntüdeki
mekânsal özellikleri vurgulayan veya azaltan filtreler
oluşturulur.
Yansıtım değeri değişiminin az olduğu düşük mekânsal
frekansların vurgulanıp yüksek frekanslı detayların
zayıflatılmak istendiği uygulamalarda “Alçak Geçirgenli”
filtrelerin kullanımı uygundur. Tam tersi durumda ise
“Yüksek Geçirgenli” filtre kullanılır.
5
Görüntü Zenginleştirme
Mekânsal Dönüşümler
Alçak geçirgenli filtreler (Low Pass Filter) görüntüyü
yumuşatırken (ortalamda bilgi muhafaza edilir),
Yüksek geçirgenli (High Pass Filter) filtreler
görüntünün ortalama bilgisini zayıflatan bir etkiye sahiptir.
Yaygın kullanımda alçak geçirgenli filtrenin ağırlıklarının
toplamı 1, yüksek geçirgenli filtrenin ağırlıklarının toplamı
ise 0 olacak şekilde ağırlıklandırma yapılır.
Ancak yüksek geçirgenli filtrelemede bu genellemenin
dışında kalan farklı kernel çeşitleri de kullanılmaktadır.
6
Görüntü Zenginleştirme
Mekânsal Dönüşümler
Bu filtrelerden başka
Istatistiksel
Morfolojik
Gradyen
ölçek-mekan
Filtreleri gibi daha bir çok farklı filtre çeşidi
vardır.
7
Kenar Çıkartma Filtreleri
Kenarlar, piksellerin parlaklık
fonksiyonlarının aniden değiştiği
yerlerdir.
En yaygın kullanılan kenar belirleme
algoritmaları:
Roberts
Prewitt
Sobel
Canny
8
Görüntü Sınıflandırma
Sınıflandırma
nedir
Sınıflandırma türleri
Kontrolsüz/Kontrollü
Sınıflandırma
Hata
(Denetimli, Eğitimli)
doğruluğu
matrisi
9
SINIFLANDIRMA
Yer yüzeyindeki cisimlerin elektromanyetik spektrumun
değişik bölgelerinde yansıttıkları veya yaydıkları ışınım
farklılık göstermektedir.
Bu farklılıklardan yararlanarak yer yüzeyindeki cisimler
sınıflandırılabilmektedir.
Sınıflandırma, piksellerin yansıtma değerleri dikkate
alınarak gruplandırılmaları işlemidir.
Amaç uydu görüntüsündeki her bir pikseli spektral özelliklerine
göre farklı gruplara ayırmak ve pikseli yansıtma değerine göre yer
yüzünde karşılık geldiği kümeye atmaktır.
10
11
12
SINIFLANDIRMA
Sınıflandırma işleminde dikkat edilecek konular
Algılayıcı, algılama zamanı ve spektral bantların amaca
uygun olarak seçimi,
Yeryüzü özelliklerini ortaya koyabilecek kontrol
alanlarının seçimi,
Amaca yönelik sınıflandırma algoritmalarının seçimi,
Belirlenen bu özelliklerin tüm görüntüye uygulanması ve
sonuç görüntülerinde doğruluk analizlerinin yapılması.
13
SINIFLANDIRMA
Piksellerin yansıtma değerleri bulundukları görüntünün çeşidine
ve ait olduğu ögeye bağlı olarak değişmektedir.
Sınıflandırma yöntemi kriterlerine bağlı olarak piksel kümeleri
oluşturulur, ancak bazı piksellerin değerleri, gruplar için belirtilen
sayısal aralıkların çok dışında ise tanımlanamayanlar (null ya da
unknown) grubuna yerleştirilir.
Sınıflandırma yöntemleri, kullanıcının sınıflandırmaya müdahale
edip etmemesine bağlı olarak, kontrollü/denetimli/egitimli
(supervised) ve kontrolsüz/denetimsiz/egitimsiz (unsupervised)
olmak üzere iki başlık altında incelenir (Shrestha, 1998).
14
SINIFLANDIRMA
Kontrolsüz Sınıflandırma
Kullanıcının veya araştırmacının sınırlı olarak
yönlendirmesi ve belirli benzerlik uzaklıkları dikkate
alınarak sadece bilgisayar tarafından piksellerin gri
değerlerler kullanılarak spektral gruplar oluşturulur.
Bu tip sınıflandırma, ilgili alan veya çalışma alanı
hakkında daha önceden herhangi bir bilgi yoksa
uygulanır.
Kullanıcının bilgisi sadece bu grupların
isimlendirilmesinde ve sınıf adedi belirtilmesinde kullanılır
(Richards, 1986).
15
SINIFLANDIRMA
Kontrolsüz Sınıflandırma
Analitik işlem, algoritmalar kullanılarak ve bunlardan
oluşturulan gruplara göre yapılır.
Gruplama uygulaması, yansıma verilerinin sınıflandırılması
sonucunda oluşur ve sonra bu spektral sınıflardan birine ait
olarak ilgili bütün pikseller etiketlenir. Her bir sınıfın bilgisi
sadece semboliktir ve yeryüzünü örtme çeşitleriyle ilgili
değildir.
Diğer taraftan kontrolsüz sınıflandırma, arazide
araştırmacıların çalışmasından önce belirlenen çalışma
alanındaki ayrılabilir sınıfların spektral olarak sayılarının
belirlenmesine yardımcı olabilir.
16
SINIFLANDIRMA
Kontrolsüz Sınıflandırma
Araştırmacının çalışma alanına ait herhangi bir geçmiş
bilgisi olmadan piksellerin gri değerlerinin gruplara
bölünmesiyle yapılır.
Kullanıcının bilgisi sadece bu grupların
isimlendirilmesinde ve sınıf adedi belirtilmesinde
kullanılır (Richards, 1986).
17
En temel kontrolsüz sınıflandırma yöntemi Kortalamalar (K-means) algoritmasıdır.
Bu yöntemde gruplar, seçilen küme merkezlerine
olan uzaklıkları dikkate alınarak en yakın oldukları
kümeye atanır. (Uzaklık ölçütü Öklit)
Küme merkezleri rastlantısal ya da sistematik olarak
belirlenir.
Her bir kümeleme işleminden sonra küme merkezleri
güncellenir.
En uygun merkez değeri iteratif olarak güncellenerek
elde edilir.
18
19
SINIFLANDIRMA
Kontrolsüz Sınıflandırma
Kontrolsüz sınıflandırma yöntemleri içerisinde diğer en
yaygın olarak kullanılan ISODATA yüntemidir.
ISODATA
Iterative Self Organizing Data Analyses Tecnique
Tekrarlı Veri Analizi Yöntemi
Bu yöntem, tekrarlı olarak tüm sınıflandırmayı
gerçekleştirme ve uygulanan her iterasyon sonrasında
yeniden istatistik hesaplamasını temel alır.
512
ISODATA
İstenen sınıf miktarı
Tekrarlama (Iterations)
Yakınlaşma hatası limiti (Convergence
threshold) iterasyonlar arası değişmeyen
maksimum piksel (%)
21
Sınıf merkezleri rastlantısal belirlenir ve pikseller
merkeze en kısa mesafede ki sınıfa atanır
Standart sapma ve sınıf merkezleri arası mesafe
ölçülür
Standart sapma değeri kullanıcı tanımlı eşik
değerden büyükse sınıf ikiye bölünür
İki sınıfın orta noktaları arası mesafe tanımlı min.
mesafeden küçük ise iki sınıf birleştirilir.
22
http://academic.emporia.edu/aberjame/student/banman5/perisocl.gif
23
24
SINIFLANDIRMA
Kontrollü Sınıflandırma
Sınıflandırmayı yapan kişinin çalışma alanı arazi
örtüsü ile ilgili bilgi sahibi olması gereklidir.
Çalışma ve karar verme şeklinde iki aşamaya ayrılır:
Çalışma aşamasında, sınıflandırmayı yapan kişi,
görüntü üzerinde her bir sınıf için piksel sayısal
aralıklarını poligonlar oluşturarak tanıtır.
kullanıcıya poligonlar çizdirme (draw poligon),
artan bölge (region growing)
önceden belirlenen poligon (existing poligon)
yöntemlerinden bir tanesi seçilerek yapılır.
24
Artan bölge (region growing)
Temel/ana/kaynak piksel (seed pixel) seçilir
Komşu pikselleri tarar ve özellikleri kaynak piksel ile
karşılaştırır (gri değer)
Farklı pikseller farklı sonuç verebilir
26
27
28
http://ces.iisc.ernet.in/hpg/envis/Remote/section28.htm
http://www.sc.chula.ac.th/courseware/2309507/Lecture/remote18.htm
29
SINIFLANDIRMA
Kontrollü Sınıflandırma
Bu işlemi karar verme aşaması izler ve bilgisayar piksellerin
benzer özelliklerde olup olmadıklarını saptayarak
görüntüdeki bütün pikselleri sınıflara atama işlemini
gerçekleştirir
Kontrollü sınıflandırma yöntemleri, aşağıdaki aşamaları
içerir;
Yeryüzünü kaplayan sınıfların sayısı ve bunların hangi görüntüde
sınıflandırılacağına karar verilmesi.
Çalışma alanındaki daha önceki bilgiler kullanılarak, belirlenmiş
sınıflardan örnek piksel seçilmesi. Belirlenen her bir eğitim
(training) örneği en az 30 piksel içermelidir.
29
SINIFLANDIRMA
Kontrollü Sınıflandırma
Belirli sınıfların parametrelerini hesaplamada algoritma
kullanılarak eğitim örneğine uygulanır.
Bu parametreler olasılık modeli özelliklerinde kullanılabilir veya
çoklu-spektral alanda tanımlanan bölümlerin denklemlerinde olabilir.
Verilen bir sınıf için bu parametreler dizini sınıfa ait “signature” olarak
isimlendirilir.
Görüntüdeki her piksel algoritmalar sınıflamasından bir
tanesi kullanılarak istenilen sınıflardan biri içerisine
yerleştirilir. Sonuçta sınıflandırılmış görüntü elde edilir.
Tematik haritalar veya istatistik özellikli çizelgeler üretilir.
31
SINIFLANDIRMA
Kontrollü Sınıflandırma Parallelepiped/Kutu (BOX)
Uygun tanıtılan verinin her bir spektral ögesinin
histogramları denetlenerek belirli bir standarda
getirilir
İki boyutlu alanda, dikdörtgenler her bir sınıf için
tanıtım verileri etrafında oluşturulur. Üst ve alt
alanlar tanıtılır ve bu sınıfın her bir ögesinin
karakterleri için alan değeri kullanılmak üzere
tanımlanır.
İkiden büyük boyutlu özellik uzayında hiper
paralelekenarlar oluşur.
Bununla birlikte, bu alanda ki bütün ögeler çok
boyutlu kutu veya parallelepiped olarak
tanımlanır.
Hızlı bir yöntemdir ancak hiper paralelkenarlar
arasında oluşan bindirmeler sınıflandırma
performansı için bir dezavantajdır.
32
SINIFLANDIRMA
Kontrollü Sınıflandırma Minimum Distance
En Kısa Uzaklık (Minimum Distance)
Sınıflandırma Yöntemi
Her bir tanımlama dosyasının ortalama
vektörü hesaplanır. Pikselin her bir sınıf
ortalamasından uzaklığı Öklid’e göre
hesaplanır.
Öklid Uzaklığı” ise “Pisagor Teoremi” temel
alınarak bir pikselin diğer piksele olan uzaklığının
ölçüm yöntemidir (Image Analyst User Guide,
1997)
Pikseller, en yakın ortalama vektörün sınıf
bilgisine atanarak bölümlere ayrılır
33
SINIFLANDIRMA
Kontrollü Sınıflandırma Minimum Distance
Hesaplama alanı için, sadece ortalama vektörleri
hesaplanmış alanlar içerisindeki pikseller ve
sınıflandırma için tanımlanamayan sınıfa ait piksellerin
başlangıç eşik değerleri (threshold) dikkate alınır.
Eğer herhangi bir piksel, belirlenen başlangıç eşik
değerlerinden uzakta yer alıyorsa sınıflandırılmamış
olarak tanımlanır.
34
SINIFLANDIRMA
Kontrollü Sınıflandırma Minimum Distance
Çok basit ve en kolay sınıflandırma yöntemidir, ancak
birden fazla sınıfın sınırları içerisinde yer alan pikseller
genellikle en küçük sınıfın içerisinde değerlendirilmeye
alınır.
Ayrıca bu sınıflandırma yöntemi üst sınıfa hizmet eder.
Çünkü verilen spektral bant içinde en düşük ve en
yüksek sınırlar ile sınıf sınırları tanımlanır.
Eğer hala bütün sınıflar dışında pikseller varsa bu
pikseller tanımlanamamış sınıf içerisinde atanırlar
35
36
SINIFLANDIRMA
Kontrollü Sınıflandırma Maximum Likelihood
En Çok Benzerlik/ Maksimum Olabilirlik
(Maximum Likelihood) Sınıflandırma Yöntemi
Bu algoritma, veri tabanındaki spektral
farklılıklardan yararlanarak işlem yapar.
Spektral farklılıklar sadece objenin farklı
yansımasından değil, ayrıca uydu görüntüsünün
çözünürlüğünün düşük olması, topoğrafik etkiler,
atmosferdeki su moleküllerinden kaynaklanan sis
ve gürültü gibi etmenlerden de kaynaklanabilir.
37
İstatistiksel bir yöntemdir (varyans, kovaryans)
Her pikselin herhangi bir sınıfa ait olma
olasılığını değerlendirir, en yüksek olasılık
değerine sahip olduğu sınıfa atanır
Pikselleri sadece parlaklık değerlerine göre
değil, her sınıf için ayrım oluşturacak varyanskovaryans matris değerine göre oluşturur. Bu
yöntem normal dağılım gösteren veriler için
daha uygun sonuçlar üretecektir
38
39
SINIFLANDIRMA DOĞRULUK
DEĞERLENDİRMESİ
Uydu görüntülerinden elde edilen
sınıflandırma sonuçlarının doğruluklarının
belirlenmesi, uzaktan algılama verilerinden
elde edilen haritaların kalitesinin ve
kullanılabilirliğinin değerlendirilmesini sağlar.
Sınıflandırılmış uydu görüntülerinin, çalışma
alanına ait doğruluğu kesin olarak bilinen
referans verilerle karşılaştırılmasıyla,
sınıflandırmada elde edilen doğruluk oranı
belirlenir.
40
SINIFLANDIRMA DOĞRULUK
DEĞERLENDİRMESİ
Farklı tarihli uydu görüntülerinin
sınıflandırılmasından elde edilen sonuç görüntüler
üzerinde hangi sınıfın ne kadar güvenilirlikle
değerlendirilebileceğini belirlemek amacıyla
sınıflandırma doğruluğu analizi gerçekleştirilir.
Sınıflandırılmış görüntü üzerinden seçilen rastgele
piksellerle referans verilerin karşılaştırılması sonucu,
sınıflandırılmış piksellerin ait olduğu sınıflara atanma
doğrulukları, sınıflandırma hata matrisinden elde
edilir.
41
SINIFLANDIRMA DOĞRULUK
DEĞERLENDİRMESİ
I: Piksellerin yer alması gerekenden farklı bir sınıfa atanması
(error of comission)
II: Piksellerin uygun bir sınıfa atanamamasıdır (error of
omission)
1-I: Üretici doğruluğu (Producer accuracy)
2-II: Kullanıcı doğruluğu (User accuracy)
42
SINIFLANDIRMA DOĞRULUK DEĞERLENDİRMESİ
HATA MATRİSİ (ERROR MATRIX)
Hata matrislerinden çeşitli sınıflandırma doğruluk
kriterleri türetilebilir.
Toplam doğruluk
(overall accuracy)
Üretici doğruluğu
(producer’s accuracy)
Kullanıcı doğruluğu
(user’s accuracy)
43
SINIFLANDIRMA DOĞRULUK DEĞERLENDİRMESİ
HATA MATRİSİ (ERROR MATRIX)
Toplam doğruluk (overall accuracy):
doğru olarak sınıflandırılmış piksellerin toplam
sayısının (köşegen toplamı) referans piksellerin
toplam sayısına bölünmesiyle elde edilir.
Matrisin köşegeni üzerinde bulunmayan elemanları
“ihmal hatası” nı (omission error)’ temsil eder.
44
SINIFLANDIRMA DOĞRULUK DEĞERLENDİRMESİ
HATA MATRİSİ (ERROR MATRIX)
Üretici doğruluğu (producer’s accuracy):
Her sınıf içinde doğru olarak sınıflandırılmış
piksellerin sayısını, bu sınıf için kullanılan
örnekleme veri seti pikselleri sayısına bölerek
bulunur ve verilen bir arazi örtü türünün örnekleme
seti piksellerinin ne kadar iyi sınıflandırılabildiğini
gösterir.
45
SINIFLANDIRMA DOĞRULUK DEĞERLENDİRMESİ
HATA MATRİSİ (ERROR MATRIX)
Kullanıcı doğruluğu (user’s accuracy):
her sınıf içinde doğru sınıflandırılmış piksel
sayısını, bu kategori içinde sınıflandırılan
piksellerin toplam sayısına bölünmesiyle bulunur
ve “dahil etme hatasını” gösteren bir ölçüdür.
Bu doğruluk değeri, herhangi bir sınıfa atanan
bir pikselin bu sınıfı gerçekte temsil etme
olasılığını gösterir.
46
SINIFLANDIRMA DOĞRULUK DEĞERLENDİRMESİ
HATA MATRİSİ (ERROR MATRIX)
Üretici
47
Tek nesne türünün tanımı
Jonathan Huang, Tomasz Malisiewicz
Learning and Inference in Vision: from Features to Scene Understanding, 2009
48
Nesne tanıma : geometrik çeşitlilik
Jonathan Huang, Tomasz Malisiewicz
Learning and Inference in Vision: from Features to Scene Understanding, 2009
49
Bir nesne sınıfında çeşitlilik
50
Viewpoint/Scales/Illumination Variability
51
Images from Flickr
Nesne yakalama
Jonathan Huang, Tomasz Malisiewicz
Learning and Inference in Vision: from Features to Scene Understanding, 2009
52
Yanlış yakalama
Yakalanamayan yüz
Jonathan Huang, Tomasz Malisiewicz
Learning and Inference in Vision: from Features to Scene Understanding, 2009
53
54
Nesne/Obje tabanlı sınıflandırma
Temel işlem birimi piksel yerine görüntü
segmentleri/nesneler
Görüntü analiz uygulamalarından beklenen
gerçek dünya nesnelerinin elde edilememesi
55
Düşük çözünürlüklü görüntüler sadece
piksel tabanlı sınıflandırılırken
Yüksek çözünürlüklü görüntüler nesne
tabanlı sınıflandırma yapmak
mümkündür
Temel Özellikler: Objelerin fiziksel
özelliklerinin belirlenmesi (algılayıcı ve
aydınlatma). Bunlar nesnenin rengini ve
dokusunu ifade eder.
56
Topolojik Özellikler: Nesneler veya bütün
çerçevenin geometrik komşuluğunu ifade eden
özelliktir. Örneğin solda, sağda olma veya belirli
bir nesneye belirli bir mesafede olma veya
görüntü içindeki belirli bir alanda olma.
Çevresel Özellikler: Nesnelerin semantik
komşuluk ilişkilerini tanımlayan özelliklerdir.
Örneğin bir park %100 şehir alanıyla çevrili
olmalıdır.
57
Segmentasyon
Segmentasyon görüntünün birbirinden farklı alt bölümlere
ayrılmasıdır
Çoklu segmentasyon aşağıdan-yukarıya, bir piksellik
nesnelerle başlayan, alan birleştirme tekniğidir
Çok sayıda alt adımda, küçük görüntü nesneleri, büyük
olan nesneler ile birleştirilir
58
Genelde üç yaklaşım
Nokta tabanlı: gri düzeyde eşik değer uyg.
Kenar tabanlı: kenar yakalama teknikleri
Bölge tabanlı: böl ve birleştir (görüntü
nesneleri belirli homojenlik kriterlerine göre
belirlenir)
http://www.ecognition.com/sites/default/files/337_fr07_1420.pdf
59
Farklı uzaysal çözünürlükteki görüntü bilgilerinin eş
zamanlı sunumu sağlanırken, görüntü nesnelerinin
hiyerarşik ağ yapısını kurarken farklı segmentasyon
teknikleri kullanılabilir
Görüntü nesneleri birbiriyle bağlanmıştır, böylece, her
görüntü nesnesi kendi kontekstini (komşuluk), üst
nesnesini, alt nesnesini tanır
Böylece nesneler arasındaki ilişkiyi tanımlamak mümkün
olabilir. Örneğin “Ormana sınır komşuluğu”.
60
Bu hiyerarşik ağ topolojik olarak
sınırlıdır, örneğin bir üst nesnenin sınırı,
alt nesnelerinin sınırlarıyla uyumludur.
Belirli bir görüntü nesnesiyle gösterilen
bir alan, alt nesnelerin alanları toplamıyla
tanımlanır.
Her bir görüntü nesnesi için poligonlar
üretilerek vektörleştirme yapılabilir
61
Çoklu-çözünürlüklü segmantasyon işlemi
kullanarak görüntü nesnelerinin
hiyerarşik yapısı oluşturulmaktadır.
Üst katman görüntü segmentleri küçük
ölçekli nesneleri gösterirken, alt katman
segmentleri ise büyük ölçekli nesneleri
gösterir.
62
Ölçek parametresi (Scale Parameter):
Bu parametre, ortalama nesne boyutunu
dolaylı yoldan etkiler.
Bu parametre nesnelerin heterojenliğine
izin veren maksimum değeri belirler.
Ölçek parametresi ne kadar büyürse
nesnelerin boyutu da o kadar büyür.
63
Renk / Biçim (Color / Shape):
Renk ve biçim çatışmasının nesne üretimine
olan etkisi (homojenlik)
Biçim kriterinin yüksek olması spektral
homojenliğinin nesne üretimine etkisini
azaltır
64
Yumuşaklık / Bütünlük (Smoothness /
Compactness):
0' dan büyük olduğunda kullanıcı,
nesnelerin daha bütün (yoğun) veya daha
yumuşatılmış olması gerektiğine karar
verebilir.
65
J. Appl. Remote Sens. 8(1), 083686 (Jan 29, 2014). doi:10.1117/1.JRS.8.083686
66
Segmentasyonda çeşitli parametreler göz
önüne alınır:
Renk: her bantın ortalama, std sapma, bant
oranları
Boyut: alan, uzunluk/genişlik oranı,
Biçim: asimetri, dikdörtgen uyumu, yuvarlaklık
Doku: pürüzsüzlük, lokal homojenlik
Sınıf seviyesi: komşuluk ilişksi, alt ve üst
komşuluk
67
68
http://geomatik.beun.edu.tr/marangoz/
69