ĠSTANBUL TEKNĠK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
ASENKRON MAKĠNANIN KONTROLÜNDE OPTIMUM PI
TASARIMI VE BULANIK–PI ĠLE KARġILAġTIRILMASI
YÜKSEK LĠSANS TEZĠ
Müh. Devrim ÖZKAN
Anabilim Dalı: Elektrik Mühendisliği
Programı: Kontrol ve Otomasyon Mühendisliği
Tez DanıĢmanı: Doç.Dr. Metin GÖKAġAN
HAZĠRAN 2003
2
ÖNSÖZ
Yapmış olduğum çalışma sırasında benden yardımlarını esirgemeyen değerli
hocam Doç.Dr. Metin GÖKAŞAN‟a ve yine çalışmam sırasında çeşitli aşamalarda
bana görüş ve tavsiyeleriyle yol gösteren değerli hocam Prof.Dr. İbrahim EKSİN‟e
teşekkürlerimi sunarım.
Haziran 2003
Devrim ÖZKAN
3
ĠÇĠNDEKĠLER
ġEKĠL LĠSTESĠ
SEMBOL LĠSTESĠ
ÖZET
SUMMARY
V
VII
VIII
IX
1- GĠRĠġ
1
2- ASENKRON MAKĠNANIN DĠNAMĠK MODELĠ
3
2.1- Duran Eksen Takımında Vektör Uzayı
2.2- Dönen Eksen Takımı ve Bu Eksen Takımı ile İlgili Dönüşümler
3- ASENKRON MAKĠNANIN KONTROLÜ
3.1 Asenkron Motorun Kontrol Yöntemleri
3.1.1- Skaler Kontrol
3.1.2- Vektörel Kontrol
3.1.1.1- Klasik Alan Oryantasyonu Düzenekleri
3.1.1.2- Doğrudan Vektörel Kontrol
4- PI KATSAYILARININ ELDE EDĠLMESĠ
4.1 Hooke-Jeeves Yöntemi
4.2 Sonuçlar
5- BULANIK KONTROL
5.1 Bulanık Mantık ve Bulanık Kümeler
5.2 Üyelik Fonksiyonları
5.3 Bulanık Mantık İşlemleri
5.3.1 Bulanık Sistem
5.3.2 Bulanık Gerçekleme
5.3.2.1 Mamdani Tipi
5.3.2.2 Lusing-Larson Tipi
5.3.2.3 Sugeno Tipi
5.4 Berraklaştırma Yöntemleri
5.4.1 Ağırlık Merkezi Yöntemi
5.4.2 Maksimumların Ortalaması Yöntemi
5.5 Bulanık Kontrol
5.5.1 Neden Bulanık Kontrol
5.5.2 Bulanık Kontrolörün Temel Yapısı ve Kontrol İlkesi
5.5.3 Bulanık Kontrolör Tasarımı
3
9
12
12
13
14
16
16
19
20
25
26
26
27
29
29
29
30
31
32
34
35
35
36
36
37
42
4
6- SONUÇLAR VE ÖNERĠLER
44
KAYNAKLAR
45
EK-A
47
EK-B
52
5
ġEKĠL LĠSTESĠ:
ġekil 2.1
ġekil 2.2
ġekil 2.3
ġekil 2.4
ġekil 2.5
ġekil 2.6
ġekil 2.7
ġekil 2.8
ġekil 3.1
ġekil 3.2
ġekil 4.1
Grafik 4.1
Grafik 4.2
Grafik 4.3
Grafik 4.4
Grafik 4.5
ġekil 5.1a
ġekil 5.1b
ġekil 5.2
ġekil 5.3
ġekil 5.4
ġekil 5.5
ġekil 5.6
ġekil 5.7
ġekil 5.8
ġekil 5.9
ġekil 5.10
ġekil 5.11
ġekil 5.12
ġekil 5.13
ġekil 5.14
ġekil 5.15
ġekil A.1
ġekil A.2
ġekil A.3
ġekil A.4
İki kutuplu, üç fazlı statorun şematik gösterimi
t = 0o olduğu durumda stator mmf vektörleri
t = 60o olduğu durumda stator mmf vektörleri
Stator referans düzleminde stator mmf bileşenleri
t = 0o olduğu durumda 2 fazlı statorun mmf vektörleri
t = 60o olduğu durumda 2 fazlı statorun mmf vektörleri
Başlangıç anında duran ve dönen eksen takımlarında stator
mmf vektörü
‟nın 1/6‟sı kadar geçen zaman diliminde duran ve dönen
eksen takımlarında stator mmf vektörü
Optimal olmayan (a) ve optimal (b) moment üretim koşulları
Serbest uyarmalı bir doğru akım makinasının blok
diyagramı
ASM Kontrolünün PI Kontrolörler Kullanılarak Yapıldığı
Sistemin Blok Gösterimi
Kmi ve Kmf değerleri için elde edilen momentlerin
karşılaştırılması
Kmi ve Kmf değerleri için elde edilen akıların karşılaştırılması
Kmi ve Kmf değerleri için elde edilen açısal hızların
karşılaştırılması
Kmi ve Kmf değerleri için elde edilen isd akımlarının
karşılaştırılması
Kmi ve Kmf değerleri için elde edilen isq akımlarının
karşılaştırılması
Sıcaklığın bulanık kümelerle gösterimi
Sıcaklığın crisp kümelerle gösterimi
Değişik üyelik fonksiyonları
Giriş/çıkış izdüşüm gösterimi
Mamdani yöntemi kullanılan üç kurallı bulanık sistem
Lusing Larson yöntemi kullanılan üç kurallı bulanık sistem
Sıfırıncı derece Sugeno yöntemi kullanılan üç kurallı bulanık
sistem
Birinci derece Sugeno yöntemi kullanılan üç kurallı bulanık
sistem
İki Kurallı bir sistem için çıkışın berraklaştırılması
Değişken eylemsizlik momentine sahip vekör kontrollü
sürücü sisteminin bulanık hız kontrolü
Tek kurallı bulanık hız kontrol ilkesi
İki kurallı bulanık kontrol ilkesi
Geribeslemeli sistemde bulanık kontolün yapısı
Bulanık kontrolörde kullanılan kurallar
e ve de için kullanılan üyelik fonksiyonları
Kullanılan kurallar sonucu oluşan kontrol yüzeyi
Kullanılan ASM‟un Blok Gösterimi
Mekanik dönüşümlerin yapıldığı blok
is‟nın elde edilmesi
ir‟nın elde edilmesi
4
4
5
6
7
7
10
10
15
16
19
23
24
24
25
25
29
29
29
30
32
33
34
35
36
38
39
40
41
42
42
43
47
48
49
49
6
ġekil A.5
ġekil A.6
Grafik B.1
Grafik B.2
Grafik B.3
Grafik B.4
Grafik B.5
Grafik B.6
Grafik B.7
Grafik B.8
Grafik B.9
Grafik B.10
Grafik B.11
Grafik B.12
Grafik B.13
Grafik B.14
Grafik B.15
Grafik B.16
Grafik B.17
Grafik B.18
Grafik B.19
Grafik B.20
Grafik B.21
Grafik B.22
Grafik B.23
Grafik B.24
Grafik B.25
ASM Kontrolünün PI Kontrolörler Kullanılarak Yapılmasını
Gösteren Simulink Modeli
ASM kontrolünde kullanılan Bulanık-PI için hazırlanan
Simulink modeli
Optimize edilmiş PI Kontrolör (üstte) ve Bulanık-PI (altta)
Kontrolör ile elde edilen moment değerleri
Optimize edilmiş PI Kontrolör (üstte) ve Bulanık-PI (altta)
Kontrolör ile elde edilen akı değerleri
Optimize edilmiş PI Kontrolör (üstte) ve Bulanık-PI (altta)
Kontrolör ile elde edilen açısal hız değerleri
Optimize edilmiş PI Kontrolör (üstte) ve Bulanık-PI (altta)
Kontrolör ile elde edilen Isd akımı değerleri
Optimize edilmiş PI Kontrolör (üstte) ve Bulanık-PI (altta)
Kontrolör ile elde edilen Isq akımı değerleri
Kmi ve Kmf değerleri için t=2.5s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen momentlerin
karşılaştırılması
Bulanık-PI kontrolör ile t=2.3s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen moment değişimi
Kmi ve Kmf değerleri için t=2.5s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen akıların karşılaştırılması
Bulanık-PI kontrolör ile t=2.3s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen akı değişimi
Kmi ve Kmf değerleri için t=2.5s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen açısal hızların
karşılaştırılması
Bulanık-PI kontrolör ile t=2.3s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen açısal hız değişimi
Kmi ve Kmf değerleri için t=2.5s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen isq akımlarının
karşılaştırılması
Bulanık-PI kontrolör ile t=2.3s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen isq akımı değişimi
Kmi ve Kmf değerleri için t=2.5s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen isd akımlarının
karşılaştırılması
Bulanık-PI kontrolör ile t=2.3s‟de yük momentinin 0‟dan 20
Nm‟ye yükseltilmesiyle elde edilen isd akımı değişimi
50
Kmi ve Kmf değerleri için moment hatalarının karşılaştırılması
Bulanık-PI kontrolör için moment hatası
Kmi ve Kmf değerleri için akı hatalarının karşılaştırılması
Bulanık-PI kontrolör için akı hatası
Kmi ve Kmf değerleri için açısal hız hatalarının
karşılaştırılması
Bulanık-PI kontrolör için açısal hız hatası
Kmi ve Kmf değerleri için isd akım hatalarının karşılaştırılması
Bulanık-PI kontrolör için isd akımı hatası
Kmi ve Kmf değerleri için isq akım hatalarının karşılaştırılması
Bulanık-PI kontrolör için isq akımı hatası
62
62
63
63
64
51
52
53
54
54
56
57
57
58
58
59
59
60
60
61
61
64
65
65
66
66
7
SEMBOL LĠSTESĠ:
Vs
: eksen takımı stator gerilimleri
Vsdq
: dq eksen takımı stator gerilimleri
is
: eksen takımı stator akımları
Ir
: eksen takımı rotor akımları
isdq
: dq eksen takımı stator akımları
r
: eksen takımı rotor akıları
rd
: dq eksen takımı rotor d akısı
s
: Dönüş açısı
Te
: Motor momenti
Ty
: Yük momenti
Pp
: Asenkron motorun kutup sayısı
Lr
: Rotor endüktansı
Ls
: Stator endüktansı
Lm
: Mıknatıslanma endüktansı
rs
: Stator direnci
rr
: Rotor direnci
m
: Açısal hız
: Elektriksel hız
kT
: Moment sabiti
Me
: Doğrudan vektörel kontrolle elde edilen motor momenti
ia
: Doğru akım makinası endüvi akımı
f
: Doğru akım makinası akısı
J
: Eylemsizlik momenti
r
: Rotor zaman sabiti
: Bulanık mantık üyelik fonksiyonu
8
ÖZET
Günümüzde asenkron makina kullanılan işletmelere, değişken hız ve
moment parametrelerine ihtiyaç duyan tahrik sistemleri uygulanmaktadır. Bu
sistemlerin kontrolünde ise vektör kontrol üniteleri kullanılmaktadır. Bir vektör kontrol
türü olan doğrudan vektör kontrolde de akı, hız, moment, vb gibi değişkenler
çoğunlukla PI kontrolörler yardımıyla
kontrol edilir. Bu çalışmada asenkron
makinanın kontrolü için kullanılan bu PI kontrolörlerin, kontrolör katsayılarının
bulunması için bir sayısal optimizasyon yöntemi kullanılmış ve makinanın değişik
çalışma koşulları için elde edilen sonuçlar gözlemlenmiştir.
Çalışmanın ikinici aşamasını bulanık kontrolörler oluşturmaktadır. Bilindiği
üzere bulanık kontrol geride bıraktığımız on yıl içerisinde giderek daha sık
kullanılan, anlaşılması ve uygulanması oldukça kolay bir yöntem olarak kontrol ve
otomasyon alanındaki yerini sağlamlaştırmıştır.
Bulanık kontrolün klasik kontrol yöntemlerine göre birçok avantajı
bulunmaktadır. Bunlar kısaca matematiksel modele ihtiyaç duyulmaması, kontrolörü
tasarlayan kişinin tecrübelerini direkt olarak tasarıma aktarma olanağına sahip
olması ve lineer olmayan, çok değişkenli parametrelere sahip sistemlerde
dayanıklılığın artmasının sağlanması olarak sıralanabilir. .
Çalışmanın son aşamasında asenkron makinada kullanılan bir PI kontrolör
yerine bulanık-PI kontrolör yerleştirilmiş ve bu koşullarda elde edilen sonuçlar
gözlemlenmiştir.
9
SUMMARY
Recently, excitation systems which need variable speed and flux parameters
are often used in induction motor systems. To control such systems we can use
vectoral control units. Direct vectoral control is a part of vectoral control in which,
parameters like speed, torque, flux, etc. are generally controlled using PI controllers.
In this work, a numerical optimization method is used to find appropriate PI
controller constants and the results are observed for different operating conditions of
the machine.
Fuzzy controllers constitute the second part of this work. The fuzzy logic has
been a very popular control method since the beginning of 1990s. This popularity
comes from the simplicity in the comprehension and application of the method.
Fuzzy control has many advantages compared to the classical methods.
Fuzzy control does not strictly need any mathematical model. It is based on the
operator experience and heuristics and it is easy to apply. Also fuzzy logic gives
robust performance for a linear or nonlinear plant with parameter variation.
In the last part of the work, one of the PI controllers is replaced by a FuzzyPI controller and the results obtained under the given conditions are observed.
10
BÖLÜM 1:
GĠRĠġ:
Asenkron makinalar elektrik enerjisinin mekanik enerjiye dönüştürülmesinde
en çok kullanılan makina tipidir. Tüm elektrik motorları arasındaki paylarının %90‟lar
seviyesinde olduğu tahmin edilmektedir. Bu rakam asenkron motorun önemini
belirtmeye yeter. Asenkron motor, rotorun yapım biçmine göre ikiye ayrılır: bilezikli
asenkron motor ve sincap kafesli asenkron motor. Sanayide ve diğer birçok alanda
büyük çoğunlukla kullanılan sincap kafesli asenkron motor yapımı en kolay, en
dayanıklı, işletme güvenliği en yüksek, bakım gereksinimi en az ve en yaygın
elektrik motorudur [1], [2], [3].
Günümüzde asenkron motor kullanan işletmeler, hız ve moment büyüklükleri
kontrol edilebilen tahrik sistemlerine ihtiyaç duymaktadırlar. Bu sistemlerde hız ve
moment gibi bileşenler değişik yöntemlerle kontrol edilmektedir. Vektörel kontrol de
bu yöntemlerden biridir. Doğru akım makinasının kolayca kontrol edilebilmesi
nedeniyle asenkron makinanın da aynı biçimde kontrol edilebilmesini hedefleyen
vektörel kontrol sayesinde makinanın akı ve moment oluşturan akımları birbirinden
bağımsız olarak kontrol edilebilmektedir [1], [4], [5].
Bunun yanında vektörel kontrolde en uygun kontrolör çıkışlarını elde etmek ve
akı, hız ve moment gibi değişkenlerin kontrolünü sağlamak için PI ya da PID tipi
kontrolörler kullanmak, sıkça başvurulan bir yöntemdir. Ancak değişik sistemlere
uygulanırken bu kontrolörlerin katsayılarının bulunması her zaman kolay olmamakta
ve özellikle lineer olmayan sistemlerde bu katsayılar çoğu zaman deneme-yanılma
yöntemiyle bulunmaktadır.
Bu yöntemle bulunan katsayıların güvenirliği elbette
tartışmaya açıktır. Tüm bu sebeplerden dolayı kontrolör katsayılarının sayısal
yöntemlerle bulunmasının uygun kontrolün sağlanması için daha güvenilir olduğu
kesindir [6]. Bu aşamada sayısal optimizasyon yöntemlerine başvurulması ve elde
edilmek istenen kontrolör katsayılarının bu yöntemler sayesinde bulunması uygun
gözükmektedir. Hız kontrolünde verilen referans değerler ile gerçek değerler
arasında oluşan hız, akı, moment ve akım hatalarının minimize edilmesi ilkesinden
11
yola çıkan bu yöntemlerden birinin seçilerek kontrolörler üzerine uygulanması
neticesinde optimal sonuçlara ulaşılmış olunacaktır.
Tüm bunların yanı sıra, günümüzde giderek daha sık kullanılmaya başlanan
kontrol yöntemlerinden biri de “Bulanık Kontrol” yöntemidir. [7], [8], [9], [10].
Kullanılan sistemin bilinen parametrelere sahip uygun bir matematiksel modeli
bulunuyorsa bu sistem, örneğin Bode ya da Nyquist diyagramlarıyla, analiz edilebilir
ve uygun kontrolörler tasarlanabilir. Ancak eğer kullanılan sistem kesin matematiksel
modelinin bilinmediği veya sistem parametrelerinde belirsizliklerin bulunduğu bir
sistem ise içinden çıkılması güç bir problemle karşı karşıya kalınır zira böyle bir
sistemin kontrolü ya yapılamaz ya da yapılan kontrolden düşük performans elde
edilir. Ayrıca her sistemin matematiksel modelini çıkarmak da kolay değildir.
İşte bu noktada bulanık kontrolün önemi ortaya çıkar, bulanık kontrol klasik
yöntemlere göre daha basit bir şekilde gerçeklenebilen, özellikle lineer olmayan ve
karmaşık bir modele sahip olan sistemlerde iyi sonuç veren ve kontrolörü
tasarlayacak kişinin bilgi ve tecrübesine dayanan bir yöntemdir ve daha önce motor
sürücülerinin kontrolünde, frenleme sistemlerinde, çok giriş çok çıkışlı modeller
kullanan kimyasal uygulamalarda ve bunlar gibi pek çok alanda kullanılmıştır. [11],
[12], [13]. Bulanık kontrolün lineer olmayan bir yapıya sahip olan asenkron motora
uygulanmasının tasarım ve uygulama açısından büyük kolaylıklar sağlayacağı
açıkıtır. Asenkron makinanın hız ve akısının kontrolünde de PI kontrolörler yerine
Bulanık-PI kontrolörler kullanılmasının sonucuda iyi kontrol çıkışları elde edilmesi de
beklenen bir neticedir [14], [15], [16].
12
BÖLÜM 2
ASENKRON MAKĠNANIN DĠNAMĠK MODELĠ
Asenkron makinanın sürekli sinüzoidal hal için geliştirilmiş eşdeğer devresi,
belli bir motor için, motor sürekli rejimde, sabit hızda dengeli ve sinüzoidal besleme
gerilimiyle çalışırken; stator akımı, güç faktörü, moment gibi temel büyüklüklerin
hesaplanmasına olanak tanır. Elektriksel büyüklükler fazör büyüklükler olarak
tanımlanır ve moment, çıkış gücünün rotorun açısal hızına bölünmesiyle hesaplanır.
Çıkış gücü bir ortalama değer olarak hesaplandığı ve ani bir büyüklük olmadığı için
tanımlanan moment de ani bir değer değil ortalama bir değerdir. Bu eşdeğer devre
bu yüzden geçici hal analizleri için yetersiz kalmaktadır.
Bu bölümde asenkron makina için iki adet dinamik model yapısı
tanımlanacaktır. Bunlardan biri stator referans düzleminde (hareketsiz, duran eksen
takımı, eksen takımı) bir diğeri de tahrik düzleminde olandır (hareketli, dönen
eksen takımı, dq eksen takımı). Dinamik model 1959‟da Kovacs ve Racz tarafından
tanımlanan alternatif akım makinasının vektörel büyüklükler ilkesine dayanmakadır
[1]. Motor hem bir eşdeğer devre yapısında hem de bir dizi denklem ile
tanımlanabilir. Bu işlem aynı zamanda sadece sinüzoidal değil her çeşit gerilimle
beslenen motorun dinamiklerinin analizine de olanak tanımaktadır.
2.1- Duran Eksen Takımında Vektör Uzayı:
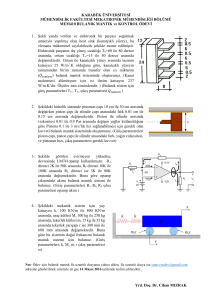
Şekil 2.1, 3 fazlı, 2 kutuplu bir asenkron makinanın statorunun kesidini
gösterir. Kolaylık açısından her faz sargısının tek bir oluğa yerleştirilmiş bobinden
oluştuğu kabul edilmiştir. Bu şekilde toplam altı iletken stator üzerine yerleştirilmiştir.
Pratikte kullanılan motorlar daha karmaşık stator sargılarına sahiptir bu yüzden söz
konusu basit model bundan böyle ilkel üç fazlı motor olarak adlandırılacaktır. Bir faz
akımı üzerinde “üs” işareti bulunmayan iletkenlerden birine, örneğin A, giriyorsa
pozitif olarak, A‟ gibi “üs” işareti bulunan iletkenlerden birine giriyorsa negatif olarak
13
kabul edilmiştir. ve olarak adlandırılan iki eksen sırasıyla statorun yatay ve dikey
geometrik eksenlerine göre yerleştirilmiştir. Bunlar aynı zamanda statorun duran
eksen takımını temsil etmektedirler.
ġekil 2.1- Ġki kutuplu, üç fazlı statorun Ģematik gösterimi
Temel olarak, stator sargılarının açısal hızına sahip dengeli bir üç faz
alternatif akım kaynağından beslendiği kabul edilmektedir. Şekil 2.2‟de stator, isa,
isb, isc
gibi stator akımlarının t = 0 gibi bir andaki fazör diyagramıyla birlikte
gösterilmektedir.
ġekil 2.2- t = 0 olduğu durumda stator mmf vektörleri
o
14
AA‟, BB‟, CC‟ stator sargılarındaki isa, isb, isc akımları buralarda
magnetomotor kuvvetleri (mmf) oluştururlar. Fsa , Fsb, Fsc oluşan bu kuvvet
vektörleridir. Bileşke mmf vektörü Fs mmf faz vektörlerinin toplamıdır.
ġekil 2.3 t = 60 olduğu durumda stator mmf vektörleri
o
Şekil 2.3, akım fazörlerinin Şekil 2.2‟dekine göre 60o hareket etmiş halini
göstermektedir. Şekilden, Fs vektörünün stator referans düzleminde aynı açısal
büyüklükte hareket ettiği görülebilir. Genliği değişmemiş, fazör mmf‟larnın 1.5 katı
büyüklüğünde kalmıştır. Şunu da vurgulamak gerekir ki vektörel büyüklükler
motorun gerçek, fiziksel uzayında bulunmakta buna karşın fazörler, fiziksel alternatif
akım büyüklüklerinin soyut bir gösterimi olup hayali, karmaşık bir düzlemde yer
almaktadırlar. Bu yüzden geometrik açı s, t elektriksel açısına ancak 2 kutuplu bir
statorda eşit olur. Genel olarak P- kutuplu bir stator için;
s
2
t (2.1)
P
yazılabilir.
ekseni reel, ekseni de imajiner eksen kabul edilerek Fs vektörü şu şeklide
ifade edilebilir:
Fs Fs e j s Fs jFs (2.2)
15
burada Şekil 2.4‟te gösterildiği gibi Fs ve Fs, Fs‟nın yatay ve dikey bileşenleri, Fs
ise bu vektörün genliğidir. Şunu da vurgulamak gerekir ki vektörün genliği referans
düzlemden etkilenmez.
ġekil 2.4 Stator referans düzleminde stator mmf bileĢenleri
Şu ana dek ele alınan motor modelinin sürekl hal çalışma koşullarında Fs
vektörünün sabit genlikli ve kaynağın açısal hızına eşit, açısal hızıyla hareket
ettiği kabul edildi. Dengeli ya da sinüzoidal olmayan stator akımları
Fs mmf
vektöründe sabit olmayan genlik ve/veya hız hareketlenmelerine neden olacaktır. Bu
yüzden, vektör gösterimi fazör gösteriminden daha genel ve sadece sinüzoidal, sabit
genlikli ve frekanslı büyüklüklere uygulanan bir gösterimdir.
Şekil 2.2 ve 2.3‟teki hareket eden mmf vektörü Fs, durgun haldeki Fsa , Fsb,
Fsc vektörlerinin toplanması sonucu elde edilmişti. Daha sonraki vektörler aralarında
120o bulunan kendi faz sargılarına dikey konumda olduğundan ve A-fazı sargısı
statorun dikey ekseni olarak kabul edildiğinden, analitik ifade;
Fs Fsa e j 0 Fsb e j120 Fsc e j 240 (2.3)
O
olarak yazılabilir.
o
o
16
Vektör uzayı kavramı akım, gerilim ve akı gibi motorun başka büyüklüklerine
de yayılabilir. Sonuç olarak, tek bir oluğa yerleştirilmiş bobinler yüzünden stator
akım vektörü is stator mmf vektörü Fs‟ya eştir ve akım vektörünün is ve is
bileşenleri gerçek ve pratikte kullanılabilir bir anlama sahiptir. Bu büyüklükler, ele
alınan üç fazlı motora eşdeğer olan iki fazlı bir motorun stator akımlarını temsil
etmektedirler. Bu gözlem sırasıyla Şekil 2.2 ve 2.3‟e karşı düşen Şekil 2.5 ve 2.6‟da
gösterilmektedir.
ġekil 2.5 t = 0 olduğu durumda 2 fazlı statorun mmf vektörleri
o
ġekil 2.6 t = 60 olduğu durumda 2 fazlı statorun mmf vektörleri
o
17
Kullanılacak olan diğer stator vektörleri, gerilim vektörü ve akı vektörüdür;
Vs Vsa e j 0 Vsb e j120 Vsc e j 240 (2.4)
O
o
o
s sa e j 0 sb e j120 sc e j 240 (2.5)
O
o
o
Vsa, Vsb ve Vsc gerilimleri stator faz sargılarının kaynak gerilimlerini
oluşturmaktadırlar. sa, sb ve sc bu sargılarda oluşan akılardır. Buradan hareketle
bu eksen takımındaki stator akımları için şu denklemlere ulaşılır:
dis
di
(Vs rs is Lm r ) / Ls (2.6)
dt
dt
dis
dt
(Vs rs is Lm
dir
dt
) / Ls (2.7)
Bu denklemlerde rs stator direnci, Lm mıknatıslanma endüktansı, Ls stator
endüktansıdır. rr rotor direnci, Lr de rotor indüktansı olmak üzere rotor denklemleri
de aynı şekilde stator referanslı rotor büyüklükleri kullanılarak yazılabilir:
dir
di
( Lm s .Lm is rr ir .Lr .ir ) / Lr (2.8)
dt
dt
dir
dt
( Lm
dis
dt
.Lm is rr ir .Lr .ir ) / Lr (2.9)
Bu denklemlerde elektriksel hız, mekanik hız ile kutup sayısının çarpımı
olarak ifade edilir, yani = m.Pp‟dir. Bunların yanı sıra rotor akıları ve dönüş açısı
s için:
r Lr ir Lm is
(2.10)
r Lr ir Lm is
(2.11)
r
r
(2.12)
s arctan
denklemleri elde edilir.
18
Elde edilen bu matematiksel modelden hareketle moment ifadesi de
aşağıdaki gibi olur:
Te
3
Lm Pp (is ir is ir ) (2.13)
2
Ty yük momenti ve J de eylemsizlik momenti olmak üzere moturun mekanik
hızı da
m
Te T y
J
.dt
(2.14)
olarak belirlenir.
2.2- Dönen Eksen Takımı ve Bu Eksen Takımı ile Ġlgili DönüĢümler:
Daha önce de belirtildiği gibi sinüzoidal sürekli hal koşullarında vektörel
büyüklüklerin bileşenleri sinüzoidal alternatif akım dalga şekillerine sahiptirler.
Bunun böyle olmasının nedeni sözü geçen bileşenlerinin fiziksel yorumunun
eşdeğer iki fazlı makinanın fazör büyüklükleri olarak yapılmasıdır.
Alternatif akım büyüklükleri motor kontrolü için uygun değildir. Şu an için,
kontrol sistemleri, değişkenlerinin zamanla değişen doğru akım işaretleri olarak
tanımlandığı blok diyagramları olarak gösterilirler. Bu yüzden alternatif akım
bileşenlerinin doğru akım bileşenleri haline gelmesini sağlayan başka bir dönüşüm
tanımlanacaktır.
Söz konusu dönüşüm, hareketli esken takımı dq‟nun duran eksen takımı
‟ya göre bir açısal hızında, Fs mmf vektörü ile aynı yönde dönmesini esas alır.
Bunun bir sonucu olarak, sürekli halde, yeni referans düzleminde motor vektörlerinin
koordinatları zamanla değişmeyen bir hal alırlar. Bu sonuç stator mmf vektörünün
her iki referans düzleminde, ‟nın bir devrinin altıda biri (60o) kadar farklı iki anda
gösterildiği Şekil 2.7 ve 2.8‟de belirtilmiştir.
19
ġekil 2.7 BaĢlangıç anında duran ve dönen eksen takımlarında stator mmf vektörü
ġekil 2.8 ’nın 1/6’sı kadar geçen zaman diliminde duran ve dönen eksen takımlarında
stator mmf vektörü
Bu iki eksen takımı arasında yapılan dönüşümler gerilim ve akım
büyüklükleri için aşağıdaki gibi tanımlanabilir:
20
Vsd Vs cos s Vs sin s
(2.10)
Vsq Vs sin s Vs cos s
(2.11)
isd is cos s is sin s
(2.12)
isq is sin s is cos s
(2.13)
Rotorun d ekseni akısı ise
rd r2 r2
(2.14)
olarak tanımlanır.
Son olarak kullanılan asenkron makinaya ait büyüklükler aşağıdaki gibidir:
Lm=0.22 [H]
r=Lr/rr [s]
Ls = Lm + Lls
J=0.5 [kg.m2]
Lr = Ls
Ty=20 [Nm]
rs=2.283 []
Vm = 220 x 2 [V]
rr=2.133 []
L=0.0216 [H]
Pp=2
f= 50 [Hz]
Bundan sonraki bölümlerde yukarıda matematiksel modeli verilen asenkron
makinanın kontrolüne ilişkin yapılan çalışmalar ve elde edilen sonuçlar sunulacaktır.
Geliştirilen model ile ilgili Simulink blokları Ek-A‟da verilmiştir.
21
BÖLÜM 3
ASENKRON MOTORUN KONTROLÜ:
3.1- Asenkron Makinanın Temel Kontrol Ġlkeleri:
Endüstriyel uygulamaların çoğunda değişken hızlı tahrik sistemlerine ihtiyaç
duyulmaktadır. Bir asenkron makinanın kontrolü temel olarak şu büyüklükler
değiştirilerek gerçekleştirilir:
1- Stator uç gerilimi
2- Stator sargısı kutup çifti sayısı
3- Stator frekansı
Bu üç yöntemden kısaca bahsetmek gerekirse; stator uç geriliminin
değiştirilmesi yöntemiyle yapılan hız kontrolü ancak dar bir aralıkta olur. Endüklenen
moment, gerilimin karesiyle orantılıdır. Uygulaması basit bir yöntem olup hızın karesi
ile değişen yük momentli tahrik sistemleri için uygundur.
Kutup saysının değiştirilmesini esas alan yöntem, kademeli bir hız kontrolü
sağlar. Kademe değişimlerinde akım sıçramaları oluşur, istenilen her hız değerine
ulaşılamaz ve en önemlisi de yöntemin sadece özel yapıdaki motorlarda
kullanılması mümkündür.
Stator frekansı değiştirilerek yapılan kontrol ise;
ns f s / Pp (3.1)
senkron hızının değiştirilmesini esas alır. Motorun hızı arttırılmak istendiğinde
frekans arttırılır, bu durumda endüklenen moment azalacaktır. Makinanın uç
gerilimini frekans ile birlikte arttırmak bu sakıncayı ortadan kaldırır. Hız kontrol
22
aralığı sıfır ile makinanın mekanik yapısı arasında olur. Frekans değiştirilerek
yapılan hız kontrolünde doğrudan ve ara devreli frekans çeviriciler kullanılır.
Ara devreli frekans çeviriciler yapısal olarak bir doğrultucu, bir ara devre ve
bir de eviriciden oluşurlar ve ara devrenin yapısına göre akım ara devreli ve gerilim
aradevreli olmak üzere ikiye ayrılırlar.
Gerilim ara devreli çeviriciler ise doğrultucu tipine göre sabit gerilim aradevreli
(SGAFÇ) ve değişken gerilim aradevreli (DGAFÇ) olmak üzere kendi arasında ikiye
ayrılır. SGAFÇ‟de frekans ve gerilim evirici üzerinden değiştirilirken DGAFÇ‟de ise
gerilim doğrultucu, frekans ise evirici üzerinden değiştirilir.
Gerilim aradevreli eviricilerle sürülen asenkron motorlarda kontrol edilebilen
büyüklükler stator geriliminin etkin değeri, frekans ve faz farkıdır. Makinada bu
büyüklüklerin uygun seçilmesi ile hız ve moment kontrolü yapılabilir. Genelde iki tür
kontrol yöntemi vardır:
3.1.1- Skaler Kontrol:
Motordaki manyetik alan sabit bir değerde tutulmuş haldeyken sürekli halde
hızın ya da momentin kontrolüne olanak sağlayan kontrole skaler kontrol adı verilir.
Bunun nedeni kontrol edilen stator akım ve gerilimi sinüzoidal olarak kabul edilmesi
ve sadece bunların genlik ve frekanslarının değiştirilmesidir. Belli bir eksen takımına
göre açısal konumlarda bir değişiklik ise söz konusu değildir.
Pratikte en çok kullanılan skaler kontrol yöntemi sabit Volt/Hertz (VF)
kontrolüdür. Bu isim motorda sabit olarak kabul edilebilecek bir akı elde etmek
amacıyla stator geriliminin frekansla orantılı bir şekilde değiştiriliyor olmasından
gelir. VF yöntemi esas olarak statorun hareketli manyetik alanın hızını frekansı
değiştirerek kontrol etmeyi içerir. Motorda oluşan moment sadece kayma hızına
bağlıdır. Sadece akı geribeslemesi gerektiğinden kontrol sistemi oldukça basittir.
Başka bir skaler kontrol yöntemi olarak da “Moment kontrolü” tekniği
kullanılır. Bu yöntemde yine manyetik alan sabit tutulurken stator akımlarının genlik
ve frekansları değiştirilerek sürekli hal moment değeri kontrol edilir. Bu durumda, hız
geribeslemesi akım geri beslemesiyle desteklenmelidir. Bu da sistemi, VF
yöntemine göre biraz daha karmaşık bir hale sokar. [1]
23
3.1.2- Vektörel Kontrol:
Genel olarak bir elektrik motoru kontrol edilebilir bir moment kaynağı olarak
düşünülebilir. Konum kontrolünde kullanılan sistemler gibi yüksek performans
sürücü
sistemlerinde
ani
momentin
kontrolünün
hassas
olarak
yapılması
gerekmektedir. Motorda üretilen moment; endüvi sargısındaki akımın ve motorda
oluşturulan manyetik alanın biraraya gelmesinin sonucudur. Alan ise belli bir optimal
seviyede tutulmalıdır. Bu seviye yüksek bir momenti ortaya çıkaracak kadar yüksek
olmalı ama motorun manyetik devresini doymaya sokacak kadar da yüksek
olmamalıdır. Alan sabitlenmiş olduğu zaman, moment endüvi akımıyla orantılı hale
gelir.
Endüvi akımları ve alanın bağımsız olarak kontrolü serbest uyarmalı doğru
akım makinalarında mümkündür. Bu makinalarda stator alan sargısındaki akım
motorun manyetik alanını belirler, rotor endüvi sargısındaki akım ise moment
kontrolü için doğrudan kullanılabilir.
Doğru akım motorlarıyla aynı şekilde asenkron makinalarda da alan, akımlar
tarafından stator sargılarında üretilirken, endüvi sargıları da rotor üzerindedir. Buna
karşın, rotor akımı bir dış kaynaktan doğrudan alınmaz, sargıda endüklenen e.m.f
sayesinde oluşur. Stator akımı hem endüvi akımının hem de manyetik alanın
kaynağıdır denilebilir. Yaygın olarak kullanılan sincap kafesli motorlarda sadece
stator akımı doğrudan kontrol edilebilir çünkü rotor sargısı ulaşılabilir konumda
değildir. Optimal moment üretim şartları, statorla rotor alanları arasında sabit bir
fiziksel düzenin bulunmamasından dolayı gerçeklenemez. Bunun yanı sıra moment
denklemi lineer değildir. Sonuçta alan ve momentin bağımsız ve hassas kontrolü
doğru akım makinalarında olduğu kadar kolay değildir.
Asenkron motorun sürekli hal moment kontrolü kavramı, “Alan Oryantasyonu
İlkesi” (AOI) esas alınarak vektörel kontrol uygulanan yüksek performans sürücü
sistemlerinin geçici hal işletim koşullarını da içine alacak şekilde genişletilmiştir. AOI
alan kontrolünü moment kontrolünden ayırmak için gerekli şartları tanımlar. Alan
oryantasyonlu bir asenkron motor bir doğru akım motorunu iki konuda örnek alır:
1- Motorda oluşan moment ve manyetik alan bağımsız olarak kontrol
edilecektir.
2- Hem sürekli hal hem de geçici rejim koşullarında motorda moment üretimi
için optimal şartlar oluşacaktır.
24
Optimal elektromanyetik moment üretim koşulları stator sargı düzlemi alanın
çizgilerine paralel duruma geldiğinde gerçekleşir. Bu stator sargı akımı i vektörünün
akı vektörüne dik olması demektir.
Şekil 3.1‟de optimal ve optimal olmayan moment koşulları gösterilmiştir. i ve
vektörlerinin dikliği elektrodinamik kuvvetleri en iyi döndürme kuvvetini verir ve
bundan dolayı da maksimum moment üretilir.
ġekil 3.1 Optimal olmayan (a) ve optimal (b) moment üretim koĢulları
Daha önce de belirtildiği gibi doğru akım makinasında optimal moment
koşulları bu makinanın doğası gereği sağlanır. Endüvi akım vektörü ia her zaman akı
vektörü f‟ye diktir. Sonuçta oluşan moment hem endüvi akımı hem de alan akısıyla
doğru orantılı olacaktır:
T= kT.ia.f (3.2)
Serbest uyarmalı doğru akım makinasıda endüvi akımı ve alan akısı bağımsız
olarak
kontrol
edilebildiğinden
dolayı
Denklem
3.2‟ye
dayanarak
motorun
değiştirilebilir bir kT.f kazancına sahip lineer bir akımdan momente çevirici olduğu
düşünülebilir. Şekil 3.2‟de böyle bir motorun blok diyagramı gösterilmiştir. Diyagram,
moment kontrollü asenkron makinanınkine benzermiş gibi gözüküyor olsa da
uygulanan işaretler motor değişkenlerinin ani değerlerini temsil etmektedir. Oysa
asenkron makinada bu değerler sürekli hal değerleridir. İşte alan oryantasyon
ilkesinin hedefi de asenkron motor için yapılan bu tip bir tanımlamayı ani değerler
için de uygulanabilir hale getirmektir.[1]
25
ġekil 3.2 Serbest uyarmalı bir doğru akım makinasının blok diyagramı
3.1.1.1- Klasik Alan Oryantasyonu Düzenekleri:
Yukarıda da sözü edildiği üzere alan oryantasyon ilkesi hem sürekli hem de
geçici rejim çalışma koşullarında asenkron motorun optimal moment üretim
koşullarını ve moment kontrolünün alan kontrolünden ayrı olarak yapılması olarak
tanımlanır. Rotor akısı ve akı vektörlerinin dikliği daima sağlanmalıdır. Bu
gereksinim sürekli halde rotorun, üretilen momentin yük momentini karşılayacak
seviyeye geleceği bir hıza oturması sonucu kendiliğinden sağlanır. Buna karşın
geçici rejim halinde alan oryantasyonu ilkesi şartlarını karşılamak için özel teknikler
kullanmak gerekir. Bu teknikler sayesinde örnek alınan doğru akım makinasının
stator ve rotor alanları arasındaki varolan düzenin algoritmik bir eşdeğeri sağlanır.
Vektörel kontrolde klasik olarak kabul edilen iki yaklaşım mevcuttur: motorun
manyetik alanının sensörlerle ölçüldüğü doğrudan vektörel kontrol yöntemi ve bu
alanın rotor konumuna göre belirlendiği dolaylı vektörel kontrol.
3.1.1.2- Doğrudan Vektörel Kontrol:
Doğrudan vektörel kontrol sistemlerinde referans akı vektörünün genliği ve
açısal konumu akı gözlemleyicileri kullanılarak stator gerilimleri ve akımlarından
ölçülür. Manyetik alanları ölçmek için Hall sondaları kullanılabilir. Sondaları motorun
hava boşluğuna, d ve q eksenlerine, yerleştirmek suretiyle hava boşluğu akısı
vektörü m‟in bunlara karşı düşen bileşenlerinin ölçümüne olanak tanınmış olur.
Doğrudan vektörel kontrolde rd ve s büyüklükleri akı gözlemleyicileri sayesinde
ölçülür ancak yapılan çalışmada gözlemleyici kullanılmamış olup bu büyüklükler
aşağıdaki gibi hesaplanmıştır:
26
1- r ve r‟dan hareketle rd ve s hesaplanır.
2- Stator akımlarında abc dq dönüşümü yapılır ve ia, ib, ic‟den isd ve isq elde
edilir.
3- rd, isq ve moment sabiti kT‟nin çarpımı sonucu moment elde edilir.
M e kT isq rd (3.3)
Hesaplanan akı, moment ve ölçülen hız gibi değerler, referans değerleriyle
karşılaştırılıp hata değerleri elde edilir ve uygun kontrolörler ve dönüşümler
yardımıyla makinaya uygulanacak gerilimin genliği, frekansı ve fazı elde edilir. Bu
kontrol işaretleri analog ya da sayısal olarak klasik kontrol yöntemleriyle
gerçekleştirilebildiği gibi modern kontrol algoritmalarının uygulanması sonucu da
elde edilebilir. Bu durumda ortaya klasik ve modern kontrol yöntemleri olmak üzere
iki tanım çıkmaktadır:
Klasik Kontrol Yöntemleri: Analog ve sayısal devrelerle gerçekleştirilebilirler.
Sisteme, verilen bir referans işaret ile karşılaştırılan gerçek değer arasındaki hatayı
sıfır yapacak kontrolörler eklenir. Bu kontrolörler genelde PI ya da PID tipidir. Hız
veya akı referans değeri ve geribeslemelerden hareketle motorun giriş büyüklükleri
olan akım veya gerilimin etkin değerini, fazını ve frekansını üretirler.
Modern kontrol yöntemleri: Bu tip yöntemlerde kontrol işareti bir amaca yönelik
olarak oluşturulur. Bu amaç bir takım hataların sıfır yapılması veya istenilen bir
yörüngenin izlenmesi olabileceği gibi daha değişik de olabilir. Modern kontrol
yöntemleri optimal ve adaptif olarak ikiye ayrılabilir. Optimal kontrolde amaç kısaca,
gerekli fiziksel sınırlamaları sağlayacak ve aynı zamanda da bazı davranış
kriterlerini minimum ya da maksimum yapacak kontrol işaretlerini elde etmektir.
Adaptif
kontrol
ise
optimal
kontrol
algoritmalarının
çoğunlukla
makina
parametrelerine bağlı kurallar vermesi ile bu parametrelerden etkilenmesi sonucu
oluşan dezavantajı gidermek için kullanılmaktadır.
Bu yöntemlerin yanı sıra son on yılda kullanılmaya başlanan bir başka sayısal
yöntem de bulanık kontroldür. Özellikle modeli bilinmeyen, ya da parametre
değişimlerine sahip lineer olmayan sistemlerde son derece olumlu sonuçlar veren
bulanık kontrol aynı zamanda dilsel değişkenler sayesinde uygulaması oldukça
kolay bir yöntem olduğundan son yıllarda giderek daha fazla tercih edilmeye
başlanmıştır.
27
Bulanık mantıktan hareketle geliştirilen neuro-fuzzy, adaptif ağ temelli bulanık
sonuçlandırma sistemleri (ANFIS) ve çeşitli genetik algoritma yöntemleri kullanılarak
gerçekleştirilen kontrol teknikleri de günümüzde kullanılmaktadırlar.
28
BÖLÜM 4
PI KATSAYILARININ BULUNMASI:
Daha önceki bölümlerde de belirtildiği gibi vektörel kontrol kullanılan
sistemlerde akı, hız veya moment gibi değişkenler çoğunlukla PI ya da PID
kontrolörlerle kontrol edilir. Ancak yine daha önce sözü edildiği üzere kullanılan bu
kontrolörlerin katsayılarının bulunması her zaman kolay olmamaktadır. Örneğin
Zeigler-Nichols ya da auto-tuning yöntemleri bu çalışmada kullanılan makinaya
uygulanmış ancak
sistemin lineer olmayan bileşenlere sahip olmasından dolayı
sonuç alınamamıştır [6]. Bir diğer yöntem ise deneme-yanılma yöntemidir ki bu
yöntemin vereceği sonuçlar da tartışmaya açıktır. Tüm bu nedenlerden dolayı
kontrolör
katsayılarının
bulunmasında
sayısal
optimizasyon
yöntemlerinin
kullanılması mantıklı bir çözüm oluşturmaktadır. Yapılan bu çalışmada sayısal
optimizasyon yöntemleri arasında kavranması ve uygulanması oldukça basit bir
yöntem olan Hooke-Jeeves yöntemi kullanılmıştır.
ġekil 4.1 ASM Kontrolünün PI Kontrolörler Kullanılarak Yapıldığı Sistemin Blok
Gösterimi
29
Şekil 4.1‟de de görüldüğü gibi kontrol bloğu beş adet PI kontrolörden
oluşmaktadır. Referans olarak 157rad/s açısal hız ve 0.95 Wb akı verilmiş ve bu PI
kontrolörler aracılığıyla çıkışta Vsq ve Vsd gerilimleri elde edilmiştir. Bu gerilimler
daha sonra abc eksen takımına adapte edilmiş ve motor ve sürücü bloğunun girişine
uygulanmıştır. Çalışmada kullanılan asenkron makinanın Simulink kontrol bloğu EkA‟da verilmiştir:
Beş adet PI kontrolörden oluşan kontrol bloğu için toplam olarak on adet
kontrolör katsayısının belirlenmesi gerekmektedir. Bu beş adet PI kontrolörden hız,
moment ve isq akımı ile akı ve isd akımını kontrol eden kontrolörler birbirleri ile
kaskad şekilde bağlantılıdır. Amaç, uygun kontrolör katsayıları yardımı ile sözü
geçen büyüklüklerde oluşan hataları minimize etmektir. Kontrol katsayıları için ilk
olarak rasgele katsayılar seçilmiş ve bu katsayılarla elde edilen sonuçlar
gözlemlenmiştir. Daha sonra bu katsayılara Hooke-Jeeves yöntemi uygulanarak en
uygun kontrolör katsayılarına ulaşılmaya çalışılmıştır.
4.1- Hooke-Jeeves Yöntemi:
-
Öncelikle her xj değişkeni için bir b1 hareket noktası ve bir hj adım
uzunluğu seçilir.
-
f(b1) bulunduktan sonra yöntem bir dizi “araştırma” ve “örnek” adımıyla
devam eder. Eğer bir araştırma adımı f(x)‟in değerinde bir azalma
yaratıyorsa bu adım “başarılı” olarak adlandırılır aksi olursa “başarısızlık”
mevcuttur.
ARAŞTIRMA ADIMLARI:
1- f(b1+h1e1) bulunur. Eğer b1‟den b1+h1e1‟e geçiş bir başarılı olur ve amaç
ölçütü tarafından verilen değer azalırsa hareket noktası b1, b1+h1e1 olarak
değiştirilir. Hareket başarısız olursa, f(b1-h1e1) bulunur. Burada başarı
sağlanırsa yeni hareket noktası b1-h1e1 olur. Yeni bir başarısızlık söz konusu
ise orjinal hareket noktası muhafaza edilir.
2- Birinci adım x2 için, burada elde edilen noktanın etrafında uygulanır. Bu
prosedür her değişken için sırayla tekrarlanır. Sonuçta yeni bir hareket
noktası olan b2‟ye ulaşılır.
30
3- Eğer b1=b2 ise, adım uzunlukları ikiye bölünür ve birinci adıma dönülür. İşlem
adım uzunluğu daha önceden belirlenmiş bir değere gelene kadar tekrar
edilir. b1b2 ise b2‟den bir “örnek adım” atılır.
ÖRNEK ADIMLAR:
1- b2‟den p1=2b2-b1 noktasına hareket edilir ve p1 etrafında bir dizi araştırma
adımı atılır:
p1=b1+2(b2-b1)
(4.2)
ya da genelleştirilmiş ifadeyi yazmak gerekirse:
pi=b1+2(bi+1-bi) (4.3)
2- Eğer örnek adımlar sırasında en düşük değer elde edilirse ve birinci adımın
araştırma adımları f(b2)‟den daha düşük bir sonuç vermiş ise yeni bir hareket
noktası okunmuş olur. Bu durumda ilk adıma geri dönülür, aksi halde
örnekleme adımından vazgeçilir ve b2 etrafında yeni araştırma adımları atılır.
Yukarıda söz edilen f(x) fonksiyonu amaç ölçütüdür. Bu sistem için amaç ölçütü
tüm hataların karelerinin alınıp birbiriyle toplanması sonucu elde edilmiştir:
J f x k n1e12 k n 2 e22 k n3 e32 k n 4 e42 k n5 e52 (4.4)
Bu denklemde:
e1 : hız hatası
e2 : moment hatası
e3 : isq akımı hatası
e4 : akı hatası
e5 : isd akımı hatası
J = f(x) : amaç ölçütüdür
Amaç ölçütünde yer alan her hata değerinin sonuçta elde edilen değer içinde
ağırlıkça eşit olması için herbir en hata değeri bir kni ağırlık katsayısıyla çarpılmıştır.
Bu katsayılar belirlenirken en küçük değere sahip akı hatası temel olarak alınmış ve
katsayısı 1 olarak kabul edilmiştir. Daha sonra diğer katsayılar bu değere göre
hesaplanmıştır. Örneğin hız hatası en fazla 157rad/s seviyesinde olacağından ve
31
amaç ölçütünde bu hatanın karesi olan 24649 sayısı yer alacağından hız hatası
amaç ölçütü içinde çok daha büyük bir ağırlığa sahip olacaktır. Bu yüzden bu
değerin en küçük hata katsayısına (yaklaşık olarak 1) sahip olan akı hatasının
seviyesine çekilmesi için, değer 1/1572 ile çarpılmıştır. Bu işleme diğer değişkenler
için de devam edilerek amaç ölçütü içinde tüm hataların aynı ağırlığa sahip olması
sağlanmıştır. Eğer herhangi bir parametrenin kontrolünün daha hassas bir şekilde
yapılması istenirse bu parametrenin ağırlık katsayısı arttırılabilir.
Yapılan hesaplamalar sonucu bulunan normalizasyon katsayıları aşağıdaki
gibidir:
kn1= 4.10-5
(1/1572)
(Hız katsayısı)
kn2 = 2.5.10-3
(1/202)
(Moment katsayısı)
kn3= 0.01
(1/102)
(isq akımı katsayısı)
(Akı katsayısı)
kn4 = 1
kn5 = 0.04
2
(isd akımı katsayısı)
(1/5 )
Şunu da belirtmek gerekir ki optimizasyonun ilerleyen devrelerinde her ne
kadar amaç ölçütü tarafından belirtilen hata azalıyor olsa da moment ve hız gibi
büyüklüklerin referans değerlerine oturma süresi artmaktadır. Bu yüzden elde edilen
sonuçlardan oturma süresi okunmuş ve bu süre amaç ölçütü ile çarpılıp hem
hatanın hem de oturma süresinin en az olması sağlanmıştır. Bu sayede
optimizasyonun durdurulması için gerekli bir dinamik ölçüt de belirlenmiştir. O halde
amaç ölçütü, td referans değere oturma süresi olmak üzere, sözü geçen dinamik
ölçütü de kapsayacak şekilde yeniden düzenlenerek şu şekilde ifade edilebilir:
J f x (k n1e12 k n 2 e22 k n3 e32 k n 4 e42 k n5 e52 ).t d (4.5)
Hooke-Jeeves yöntemi uygulanırken ilk başta seçilen kontrolör katsayısı
matrisi şu şekildedir:
Kmi= [ 1
0.1
1
1
30
1
1
1
20
1]
Bu noktadan hareketle optimizasyona başlanmıştır. Bir optimizasyon adımı
örneği vermek gerekirse:
Kmi= [ 1
0.1
olarak belirlenmişti,
1
1
30
1
1
1
20
1]
32
İlk olarak araştırma adımları uygulanmış ve kontrolör katsayıları belli
oranlarda arttırılıp azaltılarak amaç ölçütü tarafından verilen hatalar toplamının
azalmakta mı çoğalmakta mı olduğu gözlemlenmiştir.
Bu gözlemin sonucu elde edilen ikinci matris aşağıdaki gibidir:
Km2= [ 2
0.1
2
1.1
31
2
2
2
21
2]
Görüldüğü gibi ilk kontrolörün integral katsayısı 0.1 hassasiyetinde bir değişim
için bile hatanın artmasını sağladığından sabit olarak kabul edilmiştir. Diğer
katsayılarda yapılan değişiklikler amaç ölçütü tarafından verilen hata katsayısının
düşmesini sağlamıştır.
Bu şekilde devam edilerek 30 adım sonrasında elde edilen kontrolör matrisi
aşağıdaki gibidir:
Kmf= [ 4
0.1
6
1.1
67
18
16
10
60
18]
Kontrolörlere Kmi ve Kmf katsayı matrislerinin uygulanması neticesinde elde
edilen sonuçlar ise şöyledir:
Kmf
Kmi
Grafik 4.1- Kmi ve Kmf değerleri için elde edilen momentlerin karĢılaĢtırılması
33
Kmi
Kmf
Grafik 4.2- Kmi ve Kmf değerleri için elde edilen akıların karĢılaĢtırılması
Kmf
Kmi
Grafik 4.3- Kmi ve Kmf değerleri için elde edilen açısal hızların karĢılaĢtırılması
34
Kmf
Kmi
Grafik 4.4- Kmi ve Kmf değerleri için elde edilen isd akımlarının karĢılaĢtırılması
Kmf
Kmi
Grafik 4.5- Kmi ve Kmf değerleri için elde edilen isq akımlarının karĢılaĢtırılması
35
4.2- Sonuçlar:
Yukarıdaki grafiklerden de görüleceği gibi sayısal optimizasyon yöntemi
uygulanarak elde edilen sonuçlar, deneme yanılma yoluyla elde edilen sonuçlardan
üstündür. Elde edilen sonuçlar arasında en fazla önem taşıyan büyüklük olan açısal
hızın referans değerine oturma süresi 3s‟den 1s‟ye kadar düşmüştür. Bunun yanı
sıra momentin T=20 Nm değerine oturma süresi de azalmıştır. Aynı durum
akımlarda da
gözlemlenmektedir. Akı ise referans değeri olan rd=0.95 Wb
değerine daha fazla yaklaşmıştır. Değişik çalışma koşulları için elde edilen sonuçlar
Ek-B‟de verilmiştir.
36
BÖLÜM 5
BULANIK KONTROL
5.1- Bulanık Mantık ve Bulanık Kümeler
Bulanık kümeler kısaca, 1965‟te Lotfi Zadeh tarafından ortaya atılan günlük
hayatta yaşanan matematiksel belirsizliği betimlemek için kullanılan teorinin
bir
genellemesidir. Bulanık mantığın temelinin anlaşılması oldukça basittir. Örneğin, bir
sürücü kursu eğitmenin yanında bir sürücü adayı olduğu ve bu kişilerin içinde
bulunduğu arabanın kırmızı ışığa yaklaştığı düşünülsün, bu durumda eğitmenin
adaya frene basmasını söylemesi gerekmektedir. Eğitmenin, sürücü adayına “Yaya
geçidine 10 metre kala frene basmaya başla” demesi mi uygundur yoksa “birazdan
frene bas” mı ? Bu örnek gösteriyor ki günlük hayatta bazen aşırı hassas
tanımlamalar gereksiz olabilirken bunların yerine kullanılan daha belirsiz ancak
uygulanabilir ifadeler daha faydalı olabilir. Günlük hayatta herkes şans faktörünün
rol oynadığı durumlar hakkında kararlar verdiği kadar belirsiz kurallara, bulanık ya
da kesin olmayan bilgilere göre de hareket edebilir. Örneğin ailesinin” 10 gibi yatakta
ol” dediği çocuk bulanık mantıkla tanışmıştır bile... Buna dayanarak gerçek
sistemlerin hesaplanabilir modelleri de hem bulanık hem de istatistiksel belirsizlikleri
tanımalı, uygulamalı ve bunlara göre hareket edebilmelidir.
Eğer bir sistemin kesin matematiksel modeli biliniyorsa klasik kontrol
yöntemleri ile bir hayli başarılı sonuçlar elde etmek mümkündür. Ancak eğer
kullanılan
sistem
kesin
matematiksel
modelinin
bilinmediği
veya
sistem
parametrelerinde belirsizliklerin bulunduğu bir sistem ise içinden çıkılması güç bir
problemle karşı karşıya kalınır zira böyle bir sistemin kontrolünü ya yapılamaz ya da
yapılan kontrolden düşük performans elde edilir. Bunun yanı sıra her sistemin
matematiksel modelini çıkarmak da kolay değildir.
İşte yukarda sözü edilen tüm olumsuzlukları çözmek amacıyla “Bulanık
Mantık” geliştirilmiş ve oldukça geniş bir uygulama alanına sahip olmuştur. Başta da
sözü edildiği gibi bulanık mantık sadece kişisel öngörü ve yorumlara dayalı bir
sistemdir. Herhangi bir süreci kontrol eden bir kişi kafasında o sürecin matematiksel
37
modeline sahip değildir ancak geçmişteki tecrübeleri ve sezgilerini bir araya
getirerek gerekli kontrol stratejisini geliştirir ve kontrolü başarıyla sonuçlandırablir.
Örnek vermek gerekirse bir motoru ele alınsın ve bu moturun bulanık mantık
yardımıyla kontrolü ile ilgili tamamen tecrübelere ve belirsiz tanımlamalara dayanan
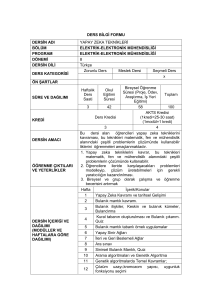
bir kural yazılmak istensin:
Eğer motorun hızı “yüksek” ise ve stator ısısı “orta derecede” ise stator akım
referansı isq‟yu “azalt”
Yukarıdaki örnekte kullanılan yüksek, orta derece ve azalt terimleri günlük
hayatta kullanılan tamamen bulanık terimlerdir. İşte bulanık mantık, yaptığı işte
uzman olan bir kişinin tecrübelerine dayanarak verdiği bu tip komutların endüstride
kullanılmasını ve daha efektif sonuçlar elde edilmesini sağlar.
Kısaca bulanık mantıkla ilgili bilinmesi gereken önemli özellikleri incelemek
gerekirse:
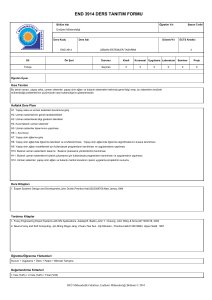
5.2- Üyelik Fonksiyonları:
Bir bulanık değişkenin değerlerinin günlük hayatta kullanılan terimlerle ifade
edildiği belirtilmişti. Örneğin Şekil 5.1‟de gösterildiği gibi bir motorun stator sıcaklığı
konuşulan dilde kullanılan terimlerle ifade edilmek istenilirse: “Soğuk”, “Ilık” ve
“Sıcak” terimlerinin kullanılması uygundur. Burada bu terimlerin her biri bir üçgen ya
da düz çizgi şeklindeki bir üyelik fonksiyonuyla tanımlanır. Bir üyelik fonksiyonu belli
bir bölgedeki bulanık değişkenin, 0 ile 1 arasındaki bir üyelik değerine nasıl
atandığını belirleyen eğriler şeklinde tanımlanabilir. Bulanık kümeler “sıfır”, “çok
soğuk”, “orta derecede soğuk”, “orta derecede sıcak”, “çok sıcak” vs. gibi daha
başka alt gruplara da ayrılabilir, bu bulanık değişkenin daha kesin bir
tanımlamasının yapılmasını sağlar. Şekil 5.1(a)‟da sıcaklık 40F derecenin altındaysa
bu tamamen “soğuk” bölgesine ait olduğunu gösterir, o halde üyelik fonksiyonu
değeri 1‟dir. Ancak sıcaklık eğer 55F derece ise bu %30 “soğuk” bölgesinde
(ÜF=0.3) ve %50 “ılık” bölgesinde demektir (ÜF=0.5). Eğer sıcaklık 80F derece ise
bu sefer tamamen “sıcak” bölgesine aittir (ÜF=1).
Bir üyelik fonksiyonu Şekil 5.2‟de gösterildiği gibi çeşitli biçimlerde olabilir. En
basit ve en çok kullanılan üyelik fonksiyonu üçgen tip olanıdır, üçgen tipi üyelik
fonksiyonu simetrik veya asimetrik bir şekle sahip olabilir.
38
ġekil 5.1 Sıcaklığın a) bulanık kümelerle b) crisp kümelerle gösterimi
ġekil 5.2 DeğiĢik üyelik fonksiyonları: a) üçgen b) yamuk c) Gauss formunda d) Ġki
taraflı Gauss formunda
39
5.3- Bulanık Mantık ĠĢlemleri:
5.3.1- Bulanık Sistem:
Bir bulanık sistem temelde, Şekil 5.3‟de gösterildiği gibi, verilen bir girişten
çıkışa doğru olan izdüşümün bulanık mantık kullanılarak formüle edilmesi olarak
tanımlanabilir. İzdüşüm süreci sonuç çıkarmanın yapılacağı temeli belirlemeye
yarar. Bir bulanık sonuç çıkarma işlemi aşağıdaki beş adımdan oluşur:
ġekil 5.3 GiriĢ/çıkıĢ izdüĢüm gösterimi
1.Adım: Giriş değişkenlerinin bulanıklaştırılması
2.Adım: Kuralın “Eğer” bölümünde bulanık mantık operatörlerinin (Ve, Veya,
Değil) uygulanması
3.Adım: Gerçekleme
4.Adım: Kurallar arasında sonuçların toplanması
5.Adım: Berraklaştırma
5.3.2- Bulanık Gerçekleme:
Gerçekleme adımı ile ilgili literatürde bir dizi yöntem tanımlanmıştır. Aşağıda bu
yöntemlerden sıkça kullanılan birkaç tanesi incelenecektir:
40
5.3.2.1- Mamdani Tipi
Bu yöntem en çok kullanılan yöntemlerden biridir. Önce genel formda verilmiş
olan üç bulanık kontrol kuralını ele alalım:
Kural 1: Eğer X negatif küçük ise ve Y sıfır ise
Z pozitif küçüktür
Kural 2: Eğer X sıfır ise ve Y sıfır ise
Z sıfırdır
Kural 3: Eğer X sıfır ise ve Y pozitif küçük ise
Z negatif küçüktür
Burada X ve Y giriş değişkenleri Z ise çıkış değişkenidir. NS; ZE ve PS bulanık
kümelerdir. Şekil 5.4, X=-3 ve Y=1.5 için Mamdani yöntemi kullanarak geliştirilen
bulanık sonuçlandırma sistemini açıklamaktadır. Tüm kuralların bir VE operatörüne
sahip olduğunu gözden kaçırmamak gerekir. Şekilde Kural 1‟in yerine getirme
derecesi (DOFn) şu şekilde yazılır:
DOF1 NS ( X ) ze (Y ) 0.8 0.6 0.6 (5.1)
Burada ^ işareti minimum operatörü, NS(X) ve ze(Y), sırasıyla X ve Y‟nin üyelik
fonksiyonlarıdır. Kuralın çıkışı PS‟ isimli kesik çizgili üyelik fonksiyonu ile
gösterilmiştir. Aynı şekilde 2. ve 3. kurallar için:
DOF2 ZE ( X ) ZE (Y ) 0.4 0.6 0.4 (5.2)
DOF3 ZE ( X ) PS (Y ) 0.4 1.0 0.4 (5.3)
yazılabilir. Bunlara karşı düşen bulanık çıkışlar şekilde de görüldüğü gibi sırasıyla
ZE‟ ve NS‟ dir. Toplam bulanık çıkış tüm üyelik fonksiyonlarının birleşimidir.
CIKIS PS ' (Z ) ZE ' (Z ) NS ' (Z ) (5.4)
'
'
41
ġekil 5.4 Mamdani yöntemi kullanılan üç kurallı bulanık sistem
5.3.2.2- Lusing Larson Tipi:
Bu yöntemde çıkış, Şekil 5.5‟de gösterildiği gibi kesilmek yerine ölçeklenir. Bu
durumda, hem aynı üç giriş hem de aynı üç kural göz önünde bulundurulur. Kural
1‟in çıkış üyelik fonksiyonu PS, şekilde de görüldüğü gibi tepe değeri 0.6 olan bir PS‟
çıkış olacak şekilde ölçeklenmiştir. Aynı şekilde Kural 2 ve Kural 3‟ün üyelik
fonksiyonları da herbirinin tepe değeri 0.4 olmak üzere ZE‟ ve NS‟ çıkışlarını verirler.
Toplam çıkış üyelik fonksiyonu Denklem 4.4 ile gösterilmiştir. Çıkış alanı Mamdani
yöntemindeki alandan bir miktar farklıdır ve buna bağlı olarak crisp çıkış da biraz
daha farklı olarak elde edilmiştir.
42
ġekil 5.5 Lusing Larson yöntemi kullanılan üç kurallı bulanık sistem
5.3.2.3- Sugeno Tipi:
Sugeno ya da Takagi-Sugeno-Kang yöntemi ilk olarak 1985‟te önerilmişti. Bu
yöntemin Mamdani ve Lusing Larson yöntemlerine göre farkı çıkış üyelik
fonksiyonlarının sadece sabit sayılar olması ya da girişlerle doğrudan lineer bağıntılı
olmasıdır. Yöntem, sabit bir çıkış üyelik fonksiyonu (singleton) ile sıfırıncı dereceden
Sugeno yöntemi olarak tanımlanırken, lineer bağıntı söz konusu olduğunda birinci
dereceden Sugeno yöntemi olarak adlandırılır. Şekil 4.6 sıfırıncı dereceden Sugeno
yönteminin kullanıldığı bir üç kurallı bulanık sistemi gösterir. Buradaki kurallar
aşağıdaki gibidir:
43
ġekil 5.6 Sıfırıncı derece Sugeno yöntemi kullanılan üç kurallı bulanık sistem
Kural 1: Eğer X, NS ve Y, ZE ise Z=K1
Kural 2: Eğer X=ZE ve Y=ZE ise Z=K2
Kural 3: Eğer X=ZE ve Y=PS ise Z=K3
K1, K2 ve K3 sabitleri crisp olarak tanımlanmış sabitlerdir. Her kuralın çıkış
üyelik fonksiyonu, her kuralın bulanık çıkışına katılmaları için gerekli DOF ile
çarpılmış bir singleton doğrusudur. Bu üyelik fonksiyonları şekilde görüldüğü gibi
toplam bulanık çıkışı elde etmek üzere bir araya toplanırlar. Şunu da belirtmek
gerekir ki Mamdani, Lusing Larson ve Sugeno yöntemlerinin aynı probleme
uygulanırsa sonuçta çıkışlar hemen hemen birbirinin aynı olacaktır.
Daha genel bir form olan birinci dereceden Sugeno yöntemi Şekil 5.7‟de
gösterilmiştir. Bu yönteme ait kurallar şu şekildedir:
44
Kural 1: Eğer X=NS ve Y=ZE ise Z=Z1=A01 + A11X + A21Y
Kural 2: Eğer X=ZE ve Y=ZE ise Z=Z2=A02 + A12X + A22Y
Kural 3: Eğer X=ZE ve Y=PS ise Z=Z3=A03 + A13X + A23Y
Yukarıdaki tüm kurallarda An değerleri birer sabittir. Birinci dereceden bir
sistemi gözönüne getirmenin kolay bir yolu her kuralı hareket eden bir singleton‟ın
yerini belirliyor gibi düşünmektir, böylece singleton çıkış doğruları giriş işaretlerinin
değerlerine göre çıkış uzayında lineer bir şekilde dolaşacaklardır. Daha yüksek
derecede Sugeno yöntemleri yaratmak da mümkündür ama bunlar pratikte
kullanılmak için pek de uygun değillerdir.
ġekil 5.7 Birinci derece Sugeno yöntemi kullanılan üç kurallı bulanık sistem
5.4- BerraklaĢtırma Yöntemleri:
Bulanıklaştırma ve birleştirme adımlarının sonucu, teker teker bütün kuralların
tüm çıkışlarının bir bileşimi olan, bulanık bir çıkıştır. Bulanık çıkışın “crisp” çıkışa
dönüştürülme işlemine berraklaştırma denir. Önemli berraklaştırma yöntemlerini
incelemek gerekirse:
45
5.4.1- Ağırlık Merkezi Yöntemi (C-o-A):
Bu yöntemde, crisp çıkış Z değişkeninin Z0 çıkışı, bulanık çıkış değeri ç(Z)
alanının geometrik ortası ya da ağırlık merkezi olarak alınır. Ağırlık merkezi yöntemi
için genel gösterim aşağıdaki gibidir:
Z0
Z . (Z )
(Z )dZ
çııkı
(4.5)
çııkı
ġekil 5.8 Ġki Kurallı bir sistem için çıkıĢın berraklaĢtırılması
5.4.2- Maksimumların Ortalaması Yöntemi (M-o-M) :
Bu yöntemde çıkışta sadece en büyük yüksekliğe sahip üyelik fonksiyonu
bileşeni göz önüne alınır. Eğer M gibi maksimumlar mevcutsa, formül:
M
Zm
m 1 M
Z0
(5.6)
olur. Burada Zm, çıkış üyelik fonksiyonunun maksimum değerde olduğu tanım
uzayının m. elemanı ve M, bu şekildeki elemanların sayısıdır.
Kapalı çevrim kontrol uygulamalarında, bulanık kontrolörün çıkışı işletim
sisteminin bir değişkenini kontrol etmektedir ve kontrol çıkışındaki sıçramalar,
kararsızlıklar ve salınımlara neden olabilir, bu yüzden bu tip durumlarda bir başka
berraklaştırma yöntemi olan C-o-M (maksimumların ortası) berraklaştırma yöntemi
de tavsiye edilir. Ancak bulanık-PI kontrolörlerde, sistem ile kontrolör arasına
yerleştirilmiş olan bir integratör, kontrol değişkeninin M-o-M berraklaştırma yöntemi
kullanılıyor olsa dahi sabit tutulmasını sağlar [7].
46
5.5- Bulanık Kontrol:
5.5.1- Neden Bulanık Kontrol?
Bulanık mantığa dayalı kontrol algoritmasına yukarıda da bahsedildiği gibi
bulanık kontrol adı verilir. Bir bulanık kontrol sistemi esas olarak kontrol operatörü
olan kişinin ya da kimi zaman sistemin araştırmacısı ya da tasarımcısının bilgi ve
tecrübelerini yansıtır. Klasik bir kontrol sisteminin tasarımı, kullanılan sistemin
matematiksel modelini temel alır. Eğer bilinen parametrelere sahip uygun bir
matematiksel model mevcutsa sistem, örneğin Nyquist ya da Bode diyagramları
yardımıyla, analiz edilebilir
ve belirli bir performans değeri için bir kontrolör
tasarlanabilir. Böyle bir süreç yorucu ve zaman alıcıdır. Buna karşın, çimento
fabrikaları, nükleer reaktörler, vb gibi karmaşık işletmeler için, uygun bir
matematiksel modelin bulunması oldukça zordur. Bu esnada sistem operatörü
süreci kontrol etmek için yeterli tecrübeye sahip olabilir.
Kullanılacak sistemin modeli tam olarak biliniyor olsa dahi bu sistemde
parametre değişim problemleri mevcut olabilir. Kimi zaman, aynı asenkron
makinanın dq modelinde olduğu gibi, model çok değişkenli, karmaşık ve lineer
olmayan bir yapıya sahip olabilir. Bir sürücünün vektörel ya da akı oryantasyonulu
kontrolü bu problemin üstesinden gelebilir ama uygun vektörel kontrol neredeyse
imkansızdır ve sistemde büyük çaplı bir parametre değişim problemli var olabilir. Bu
tip problemlerin üstesinden gelmek için, çok çeşitli adaptif kontrol yöntemleri
mevcuttur. Öte yandan bulanık kontrolün sistemin herhangi bir matematiksel
modeline ihtiyacı yoktur. Tamamen operatörün tecrübesine ve bilgisine dayanır ve
daha önce de belirtildiği üzere uygulanması çok kolaydır. Bulanık kontrol temel
olarak parametre değişimlerine sahip lineer ya da lineer olmayan bir sistemde
yüksek performans veren adaptif ve lineer olmayan kontrol tipidir.
Özetlemek gerekirse bulanık kontrolörün avantajları şu şekilde sıralanabilir:
1- Operatörün kontrol stratejisini uyguladığından anlaşılması kolaydır.
2- Gerçeklenmesi oldukça basittir.
3- Geliştirme maliyeti düşüktür. Bulanık kontrolün performans/maliyet oranı;
anlaşılması kolay ve yazılım ile donanım maliyeti düşük bir kontrol tekniği
olduğundan, oldukça yüksektir.
47
5.5.2- Bulanık Kontrolörün Temel Yapısı ve Kontrol Ġlkesi:
Şekil 5.9‟da gösterilen vektör kontrollü bir sürücü sisteminde yer alan bulanık hız
kontrolörü ele alınsın. Kontrolör, hız çevrimi hata işaretinin örneğini gözlemleyecek
ve bunun ardından çıkış işareti olan DU‟yu halihazırdaki hız olan r‟yi referans hız
r*‟a uymasını sağlayacak şekilde güncelleyecektir. Bulanık kontrolöre gelen iki giriş
işareti mevcuttur. Hata, yani:
E= r*-r (5.7)
ve hatanın türevi yani dE/dt olan CE.
ġekil 5.9 DeğiĢken eylemsizlik momentine sahip vekör kontrollü sürücü sisteminin
bulanık hız kontrolü
Vektör kontrollü bir sürücü sisteminde kontrolör çıkışı DU, isq* akımıdır. Bu
işaret mevcut kontrol işareti U ya da isq akımını üretmek için entegre edilir. Sistemin
fiziksel işletme ilkesinden yola çıkarak, basit bir bulanık mantık kuralını şu şekilde
yazmamız mümkündür:
Eğer E sıfıra yakınsa (ZE) ve CE pozitif küçük ise (PS) kontrolör çıkışı DU
negatif küçüktür (NS).
Burada E ve CE bulanık giriş değişkenleri ve DU bulanık çıkış değişkenidir.
ZE, PS ve NS uygun bulanık kümenin üyelik fonksiyonlardır. Bulanık kontrolün
üçgen şeklindeki üyelik fonksiyonları yardımıyla yürütülmesi Şekil 5.10‟da
gösterilmiştir.
E=-1 ve CE=1.8 değerleriyle şekilde de görüldüğü gibi Mamdani
yöntemi DU=-2A şeklinde bir sonuç verecektir. Daha önce de belirtilmiş olduğu gibi
genel olarak birden fazla bulanık kural kullanılır ve teker teker tüm kuralların
birleşimi çıkışta toplanır. Şekil 5.11‟de Mamdani yöntemi kullanılarak elde edilen 2
kurallı kontrol ilkesini göstermektedir. Bu iki kural şunlardır:
48
Kural 1: Eğer E=ZE ve CE=NS ise DU=NS
Kural 2: Eğer E=PS ve CE=NS ise DU=ZE
ġekil 5.10 Tek kurallı bulanık hız kontrol ilkesi
Burada DU çıkışı temsil etmektedir. Verilen kural tabanlı kontrol sistemi için
bulanık kontrolör, değişkenlerin özel giriş koşullarına göre anlamlı bir kontrol
aksiyonu geliştirir. Çıkış birkaç kuralın bileşimi şeklinde olabilir. Bu bileşimlerden en
çok kullanılanı Şekil 5.11‟de gösterilen “MAX-MIN” bileşimidir. Şunu da belirtmek
gerekir ki her kuralın çıkış üyelik fonksiyonu MIN operatörüyle elde edilirken, birleşik
bulanık çıkış MAX operatörüyle elde edilir.
Bulanık kontrolör temelde lineer olmayan statik bir giriş/çıkış atama olarak
değerlendirilebileceğinden, kontrolörün işlevini aşağıdaki formda yazabiliriz:
K1E+K2CE=DU (5.8)
Bu formülde K1 ve K2 hata ve hatanın türevine bağlı lineer olmayan katsayılar
ya da kazanç faktörleridir. Şekil 5.9‟da görülen toplama işlemini de kapsayacak
şekilde şu eşitliği yazabiliriz:
DU K Edt K CEdt
1
2
(5.9)
ya da
U K1 Edt K 2 E (5.10)
49
ġekil 5.11 Ġki kurallı bulanık kontrol ilkesi
Yukarıdaki eşitliklerin belirttiği aslında lineer olmayan kazanç faktörlerine
sahip bir bulanık-PI kontrolörden başka birşey değildir. Aynı ilkeyi genişletirsek, P ve
PID kontrolörler için bulanık kontrol algoritmasını şu şeklide yazabiliriz:
Bulanık-P kontrolü örnek kuralı:
Eğer E=PS ise U=PB
Başka şekilde ifade etmek gerekirse KE=U (K, lineer olmayan kazanç olmak
üzere)
Bulanık-PID kontrolü örneği:
Eğer E=PS ve CE=NS ve C2E=PS ise DU=ZE
Burada C2E, CE‟nin türevidir. Kontrol denklemi aşağıdaki şekilde yazılabilir:
K1 E K 2 CE K 3C 2 E DU (5.11)
çıkışın integrali alınırsa
50
DU K Edt K CEdt K C
1
2
3
2
Edt (5.12)
veya
U K1 Edt K 2 E K 3
d
( E ) (5.13)
dt
Yukarıdaki denklem de aslında bir PID kontrolörden başka birşey değildir.
Bulanık kontrolörün on-line olarak değişen, lineer olmayan adaptif kazançları, yük
bozulması ya da parametre değişiklerine karşı sistemi dayanıklı hale getirmek için
bulanık kontrolöre katkı sağlarlar.
Geribeslemeli bir bulanık kontrol sisteminin genel yapısı Şekil 5.12‟de
verilmiştir. Çevrim hatası E ve hatadaki değişim CE sinyalleri,
belirli boyutlama
faktörlerine bölünerek e ve ce elde edilmiştir. Burada e=E/GE ve ce=CE/GC‟dir.
ġekil 5.12 Geribeslemeli sistemde bulanık kontolün yapısı
Aynı şekilde, sistemin çıkış işareti U, birime indirgenmiş çıkışı boyutlama
faktörü GU ile çarpmak suretiyle elde edilmiştir, bu DU=du.GU şeklinde ifade
edilebilir. Daha sonra buradan hareketle U çıkışı elde edilir.
Bulanık kontrolün birime indirgenmiş değişkenler açısından avantajı aynı
kontrol algoritmasının tüm benzer sistemler üzerine uygulanabilir olmasıdır. Bunun
dışında, bulanık kontrolörün tasarımı da daha kolay bir hale gelir. Boyutlama
faktörleri sabit ya da programlanabilir olabilir. Programlanabilir boyutlama faktörleri
değişik kontrol bölgelerinde işlemin hassasiyetini kontrol edebilirler ya da aynı
kontrol stratejisi benzer cevap çevrimlerine uygulanabilir.
51
5.5.3- Bulanık Kontrolör Tasarımı:
Bu çalışmada kullanılan asenkron makina için geliştirilen bulanık kontrolörün
blok şeması Ek-A‟de görülebilir. Kontrolörde kullanılan kurallar, üyelik fonksiyonları
ve kontrol yüzeyi aşağıdaki gibidir:
de
P
N
P
P
Z
N
Z
N
e
ġekil 5.13 Bulanık kontrolörde kullanılan kurallar
Bu kuralları açıklamak gerekirse:
Eğer e = P ve de = P ise u= P‟dir
Eğer e = N ve de = P ise u = Z‟dir
Eğer e = P ve de = N ise u = Z‟dir
Eğer e = N ve de = N ise u = N‟dir
Burada P = pozitif, N = negatif ve Z = sıfır anlamına gelmekte, e, hatayı; de
hatanın türevini ve u da çıkışı simgelemektedir.
ġekil 5.14 e ve de için kullanılan üyelik fonksiyonları
52
Kontrolör
tasarımında
Mamdani
tipi
gerçekleme,
yamuk
tipi
üyelik
fonksiyonları ve ağırlık merkezi tipi berraklaştırma yöntemleri kullanılmıştır.
Bulanıklaştırma katsayıları olarak hata için 1/100, hatanın türevi için 1/70,
berraklaştırma katsayısı için ise 100 değerleri kullanılmıştır. Tasarlanan kontrolör,
akı kontrolünü yapan PI kontrolörün yerine yerleştirilmiş ve Ek-B‟deki sonuçlar
alınmıştır.
ġekil 5.15 Kullanılan kurallar sonucu oluĢan kontrol yüzeyi
Yukarıdaki şekilden de görüleceği üzere kontrol yüzeyi oldukça lineer bir
yapıya sahiptir. Bu da uygulanan kuralların ve üyelik fonksiyonlarının uygun yapıda
olduğunu gösterir.
53
BÖLÜM 6
SONUÇLAR ve ÖNERĠLER
Asenkron makinanın kontrolü için kullanılan PI kontrolörlerin katsayılarının
sayısal optimizasyon yöntemi kullanılarak belirlenmesinin, bu katsayıların denemeyanılma yöntemiyle belirlenmesine oranla daha güvenilir ve bilimsel bir yöntem
olduğu açıktır. Bu noktadan hareketle bu sayısal optimizasyon yöntemi daha değişik
makina sistemlerine de uygulanabilir ve bu şekilde kontrolör katsayıları bulma işlemi
hem daha pratik hem de daha güvenilir bir hal kazanmış olur.
Bunun yanısıra sayısal optimizasyon sonucu katsayıları bulunan PI
kontrolörlerden birinin (akı kontrolörü) yerine bir bulanık-PI kontrolör yerleştirilmiş ve
elde edilen sonuçların PI kontrolörler ile elde edilen sonuçlara göre daha tatminkar
olduğu görülmüştür. Bu değişiklik sonucu çıkışlar referans değerlerine hem daha
çabuk ulaşmış hem de bazı çıkışlarda gözlemlenen aşım azalmıştır. Ancak şunu da
belirtmek gerekir ki geliştirilen bulanık-PI kontrolörün boyutlama faktörleri denemeyanılma yöntemiyle bulunmuştur ve bu büyüklüklerin optimumluğu tartışmaya
açıktır. İleride yapılacak çalışmalarda bu boyutlama faktörlerinin de sayısal
optimizasyon yöntemleri sonucunda optimum bir hale getirilmesi ve elde edilen
sonuçlara daha bilimsel bir yolla ulaşılması sağlanabilir. Aynı şekilde diğer PI
kontrolörler
yerine
bulanık-PI
kontrolörler
gözlemlenebilir ve birbirleriyle karşılaştırılabilir.
yerleştirilip
elde
edilen
sonuçlar
54
KAYNAKLAR
[1] Trzynadlowski, Andrej M., The Field Orientation Principle in Control of
Induction Motors, Kluwer Academic Publishers, 1994
[2] Novotny, D.W., Vector control and dynamics of AC drives, Oxford: Oxford
University Press, 1996
[3] Çetin, Ġlhami, Schuisky, W., Elektrik Motörleri 1. Kısım, 1987
[4] Boldea, I., Nasar, S.A., Vector Control of AC Drives, CRC Press, Inc., 1992
[5] Dawson, D.M., Hu, Jun, Burg, T.C., Nonlinear Control of Electric Machinery,
Marcel Dekker, Inc. 1998
[6] Yu, Cheng-Ching,
Autotuning of PID controllers: relay feedback approach,
London : Springer, c1999
[7] Harris, John, An Introduction to Fuzzy Logic Applications, Kluwer Academic
Publishers, 2000
[8] Patyra, M.J., Mlynek D.M., Fuzzy Logic Implementation and Applications, Wiley
& Teubner, 1996
[9] Shaw, Ian S., Fuzzy Control of Industrial Systems, Kluwer Academic Publishers,
1998
55
[10]
Palm, Rainer; Driankov, Dimiter; Hellendoorn, Hans, Model Based Fuzzy
Control, Springer, 1997
[11]
Xu, Jian-Xin, Hang, Chang-Chieh, Liu, Chen, Parallel Structure and
Tuning of a Fuzzy PID Controller, Automatica 36 (2000) 673-684
[12]
Kung, Ying-Shieh, Liaw, Chang-Ming, A Fuzzy Controller Improving a
Linear
Model Following Controller for Motor Drives, IEEE Transactions on
Fuzzy Systems, Vol.2, No.3, August 1994
[13]
Alonge,F., D’Ippolito,F., Raimondi, F.M., Urso,A., Method for Designing
PI-type Fuzzy Controllers for Induction Motor Drives, IEE Proc.-Control Theory
Appl., Vol. 148, No. 1, January 2001
[14]
Patel, Ambalal V., Mohan, B.M., Analytical Structures and Analysis of the
Simplest Fuzzy PI Controllers, Automatica 38 (2002), 981-993
[15]
Edgar, C.R., Postlethwaite, B.E., MIMO fuzzy internal model control,
Automatica 34 (2000), 867-877
[16]
Mauer, A Fuzzy Logic Controller For an ABS Breaking System, IEEE
Transactions on Fuzzy Systems, Vol.3, No.4, November 1995
56
EK-A
ASENKRON MOTOR MODELĠ ĠLE ĠLGĠLĠ SĠMULĠNK BLOKLARI
ġekil A.1 Kullanılan ASM’un Blok Gösterimi
57
ġekil A.2 Mekanik dönüĢümlerin yapıldığı blok
58
ġekil A.3 is ’nın elde edilmesi
ġekil A.4 ir ’nın elde edilmesi
59
Yukarıda kullanılan „s‟ ifadesi türev, „1/s‟ ifadesi ise integral operatörü olarak
anlaşılmalıdır. Örneğin „sir_alpha‟, ir akımının türevi anlamına gelmektedir. „1/z‟ ile
ifade edilen bloklar ise birim geciktirme bloklarıdır.
Şekil A.2 mekanik dönüşümlerin yapıldığı bloğun açılımını gösterir, burada
giriş olarak ir, ir ve Ty büyüklükleri kullanılmış ve daha önce açıklanan dönüşümler
sayesinde , m, Te ve nm gibi mekanik büyüklükler elde edilmiştir.
Şekil A.3 ve A.4 is ve ir akımlarının elde edildiği blokların açılımıdır. Bu
bölümlerde giriş büyüklükleri sırasıyla ir ve ir akımlarının türevleri, Vs gerilimleri
ve is akımları ile is ve is akımlarının türevleri, ir ve ir akımları, is ve is akımları ve
elektriksel hız ‟dır.
ġekil A.5 ASM Kontrolünün PI Kontrolörler Kullanılarak Yapılmasını Gösteren
Simulink Modeli
Yukarıdaki şekilde daha önce Bölüm 4‟de blok diyagramı verilen kontrol
düzeneğinin Simulink bloğu görülmektedir. Kontrol için daha önce de belirtildiği gibi
157rad/s hız ve 0.95 Wb akı referansı verilmiş ve toplam beş adet PI kontrolör
kullanılmıştır.
60
ġekil A.6 ASM kontrolünde kullanılan Bulanık-PI için hazırlanan Simulink modeli
Bulanık Kontrol için yapılan simülasyon ise yukarıdaki Simulink modeli ile
gerçekleştirilmiştir. Giriş olarak akı hatası ve bu hatanın türevi kullanılmış daha
sonra bu değerler boyutlama faktörleriyle çarpılıp bulanık kontrolörün girişine
uygulanmıştır. Çıkış değeri tekrar bir boyutlama faktörü ile çarpılıp normalize
edilmiş, bulanık- PI yapısı gereği elde edilen değerin integrali alınmış ve çıkış elde
edilmiştir.
61
EK-B
MOTORUN DEĞĠġĠK ÇALIġMA KOġULLARINDA ELDE EDĠLEN
GRAFĠKLER:
ġekil B.1- Optimize edilmiĢ PI Kontrolör (üstte) ve Bulanık-PI (altta) Kontrolör ile elde
edilen moment değerleri
62
ġekil B.2- Optimize edilmiĢ PI Kontrolör (üstte) ve Bulanık-PI (altta) Kontrolör ile elde
edilen akı değerleri
63
ġekil B.3- Optimize edilmiĢ PI Kontrolör (üstte) ve Bulanık-PI (altta) Kontrolör ile elde
edilen açısal hız değerleri
64
ġekil B.4- Optimize edilmiĢ PI Kontrolör (üstte) ve Bulanık-PI (altta) Kontrolör ile elde
edilen Isd akımı değerleri
65
ġekil B.5- Optimize edilmiĢ PI Kontrolör (üstte) ve Bulanık-PI (altta) Kontrolör ile elde
edilen Isq akımı değerleri
Optimize edilmiş PI kontrolörle elde edilen sonuçlarda referans değere
oturma sürelerinin daha kısa olduğu görülmektedir. Aynı zamanda iki durumda da
moment için kare dalgaya yakın bir çıkış elde edilmiştir. Çıkışın bulanık-PI kontrolör
için daha kısa bir aralıkta alınmasının sebebi simülasyonun yapıldığı MATLAB
programının bu çalışma koşulunda 3.3s‟den sonra “memory allocation” hatası
vermesidir.
66
Kmi
Kmf
Grafik B.6- Kmi ve Kmf değerleri için t=2.5s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen momentin karĢılaĢtırılması
Grafik B.7- Bulanık-PI kontrolör ile t=2.3s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen moment değiĢimi
67
Kmi
Kmf
Grafik B.8- Kmi ve Kmf değerleri için t=2.5s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen akıların karĢılaĢtırılması
Grafik B.9- Bulanık-PI kontrolör ile t=2.3s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen akı değiĢimi
68
Kmi
Kmf
Grafik B.10- Kmi ve Kmf değerleri için t=2.5s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen açısal hızların karĢılaĢtırılması
Grafik B.11- Bulanık-PI kontrolör ile t=2.3s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen açısal hız değiĢimi
69
Kmi
Kmf
Grafik B.12- Kmi ve Kmf değerleri için t=2.5s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen isq akımlarının karĢılaĢtırılması
Grafik B.13- Bulanık-PI kontrolör ile t=2.3s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen isq akımı değiĢimi
70
Kmi
Kmf
ġekil B.14 Kmi ve Kmf değerleri için t=2.5s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen isd akımlarının karĢılaĢtırılması
Grafik B.15- Bulanık-PI kontrolör ile t=2.3s’de yük momentinin 0’dan 20 Nm’ye
yükseltilmesiyle elde edilen isd akımı değiĢimi
71
Yukarıdaki grafiklerde motor yüksüz bir şekilde çalıştırılmaya başlanmış,
daha sonra t=2.5s‟de 20Nm‟lik yük devreye alınmıştır. Yapılan bu değişikliğin
makinanın momenti ve isq akımından direkt olarak gözlemlenmesi mümkündür.
Motor boştayken referans hızın üzerinde olan açısal hızda da yük devreye alındıktan
sonra referans hıza doğru bir azalma meydana gelmiştir. Bulanık kontrolörde ise
yük devreye 2.3s‟de alınmıştır. Bu çalışma koşuluna geçişte akım değerlerinde
dalgalanmalar gözlemlenmiştir.
Kmi
Kmf
Grafik B.16- Kmi ve Kmf değerleri için moment hatalarının karĢılaĢtırılması
Grafik B.17- Bulanık-PI kontrolör için moment hatası
72
Kmi
Kmf
Grafik B.18- Kmi ve Kmf değerleri için akı hatalarının karĢılaĢtırılması
Grafik B.19- Bulanık-PI kontrolör için akı hatası
73
Kmi
Kmf
Grafik B.20- Kmi ve Kmf değerleri için açısal hız hatalarının karĢılaĢtırılması
Grafik B.21- Bulanık-PI kontrolör için açısal hız hatası
74
Kmf
Kmi
Grafik B.22- Kmi ve Kmf değerleri için isd akım hatalarının karĢılaĢtırılması
Grafik B.23- Bulanık-PI kontrolör için isd akımı hatası
75
Kmf
Kmi
Grafik B.24- Kmi ve Kmf değerleri için isq akım hatalarının karĢılaĢtırılması
Grafik B.25- Bulanık-PI kontrolör için isq akımı hatası
76
Yukarıdaki grafiklerden yapılan kontrol ve bulunan kontrolör katsayıları
sayesinde asenkron makina parametrelerinde oluşan hataların sıfıra çok yakın
değerlere düştüğü görülmektedir. Özellikle moment ve i sd hataları neredeyse sıfırdır.
Daha önce sözü edilen amaç ölçütündeki ağırlık katsayılarında değişiklikler
yapılarak arzu edilen parametrelerin hatalarının daha aza indirgenmesi mümkün
olabilir. Bulanık-PI hata değerleri ise bu kontrolörde kullanılan katsayılara
uygulanacak optimizasyonla daha aza indirgenebilir.