ELEKTRİK MOTORLARI VE SÜRÜCÜLER
BÖLÜM 3
Çolakoğlu
3.1.DC MOTOR SÜRÜCÜLERİ
Elektrik motorlarını işletme özellikleri,iş makinesinin işletme koşullarına bağlı olarak,
kumanda devreleri yardımıyla değiştirilebilir. Motorlarda ayarlanması istenen belli
başlı büyüklükler, dönme hızı, döndürme momenti, ivmelenme hızı ve buna bağlı
olarak, yol alma zamanı şeklinde özetlenebilir. Kumanda devrelerinde uydun özellikte
röleler, kontaktörler, magnetik devre elemanları, diyot, tristör ve transistör gibi yarı
iletken elemanlar kullanılır. Motor devresi ile kumanda devresinin tanımına tahrik
sistemi denilir.
İş makinelerinin çalıştırılmasında döndürücü olarak kullanılan elektrik motorlarının hız
ve moment karakteristikleri, iş makinesinin çalışma şartlarına bağlı olarak belirlenir.
Yarı iletkenli kumanda devrelerinin en önemli elemanı doğrultmaçlardır. Diyot ve
tristör yarı iletken elemanları ile oluşturulan doğrultmaç sistemleri,alternatif akım
kaynağından elde edilmiş doğru akım ile, doğru akım motorlarının endüvi ve uyarma
devrelerinin beslenmesinde kullanılır. Motora uygulanan doğru gerilim, motorun devir
sayısı, moment, stabilite ve yüklenme şartlarına ve gereklerine uygun olarak tristörler
yardımıyla kontrol edilir. Böylece, yarı iletkenli motor kumanda devreleri yardımıyla iş
makinelerinde çok geniş hız sınırları arasında kumanda ve ayar yapabilme imkanları
elde edilmektedir.
Doğrultmacın yük devresini bir d.a. motorunun endüvi devresinin oluşturduğunu
düşünelim. Bağıntılarda ve tariflerde kullanılmak üzere zıt E.M.K.’ni ea, endüvi
devresi endüktansını La, direncini Ra ile gösterelim ve fırçaların etkisini ihmal edelim.
Hava aralığı magnetik akısının değişken olmadığı kabul edilecek ve фf ile
gösterilecektir. Endüvi eylemsizlik momenti J ile gösterilecek ve yük momentinin ωm
açısal hızı ile orantılı olduğu kabul edilecektir.
63
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
3.1.1. BİR FAZLI - YARIM DALGA DİYOT MOTOR TAHRİK SİSTEMLERİ
En basit bir motor besleme devresi; bir fazlı a.a. kaynağı, buna bağlı diyot doğrultmaç
ve motor endüvi devresinden oluşur. Devir sayısı kontrolü, motor uyarma devresi ayrı
bir doğrultmaç üzerinden beslenerek sağlanır. Endüvi devresi geriliminin kontrolü için
istenildiğinde, tristör kontrollü doğrultmaçlar da kullanılabilir.
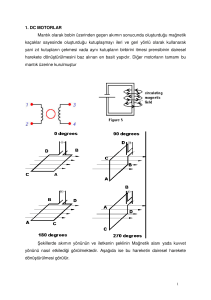
Şekil 3.l’de iki farklı yük momenti ile çalışmakta olan bir d.a. motorunun aynı ortalama
hız kademesi için gerilim, akım ve hızın zamana göre değişimleri görülmektedir.
Diyotun geçirgen olduğu pozitif dalga periyodunda ve vo geriliminin ea zıt E.M.K.’dan
büyük olması durumunda ia endüvi akımının oluştuğu bilinmektedir. Şekil 3.1.a’da ωt
= α değerinde ia akımı oluşmakta ve ωt = β değerine kadar akmaktadır. Bu iki sınır
arasındaki γ açısına “iletim açısı” denilmektedir. Burada doğrultmaçlı iletim süresi,
Va sinüzoidinin içinde ve dışında kalan ve Şekil 3.1.a’da taranmış olarak gösterilen
“gerilim zaman” alanları birbirine eşit oluncaya kadar devam eder. ωt = β iletim süresi
sonunda endüvi sargısı endüktansı tarafından,ikinci taralı alana eşdeğer enerji
şebekeye verilmekte ve endüvi devresi akı miktarı ωt = α zamanındaki duruma
dönüşmektedir.
Endüvi devresinden ia akımının aktığı süre içinde, ia akımı ve hava aralığı akısının
etkisi ile pozitif bir elektromagnetik döndürme momenti oluşur. Bu süre içinde motor
dönüş hızı Şekil 3.1.a'da görüldüğü gibi ∆ωt kadar artar. İletim süresinin bitiminden
sonra ikinci bir iletim süresi olan ωt = (2π+α) süresinin başlangıcına kadar motor
yavaşlamaya çalışır ve hızı ∆ωt kadar azalır. Bu süre içinde motor daha önce
kazanmış olduğu kinetik enerji ile yük için gerekli olan enerjiyi sağlar. Motor
eylemsizlik momentinin oluşturduğu mekanik döndürme momentinin, Tm = J dωt/dt
şeklinde hesaplanacağı bilinmektedir. Diğer taraftan motorun yavaşlama süresindeki
mekanik yük momenti hızın değişimi ile orantılı olup, değeri Bωm şeklinde ifade
edilecektir.
64
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Şekil 3.1: Yarım dalda — diyot doğrultmaçlı bir da. motor besleme devresi ve işletme eğrileri a) Az yüklü b)
Tam yüklü bir d.a. motorunda motor dönüş hızı ωm. endüvi akımı ia zıt e.m.k, ea eğrileri c) Elektriksel şema
Şekil 3.1.’deki volt-zaman alanlarının incelenmesinden de görüleceği gibi, endüvi
devresi
endüktansı iletim
süresi
boyunca
elektriksel
enerji
deposu
görevi
yapmaktadır. Bu olay, iletim süresi boyunca, birinci taranmış alana eşdeğer enerjinin
depolanması ve iletimin kesildiği andan itibaren depolanmış enerjinin geri verilmesi
şeklinde oluşur. Şekil. 3. 1.a ve 3.1 .b eğrileri karşılaştırıldığında, tam yükle
çalışmakta olan motorda ∆ωt hız değişiminin yükleme oranına bağlı olarak daha
büyük olduğu, aynı şekilde i endüvi akımı genliğinin volt-zaman alanlarının ve γ iletim
süresinin Şekil 3.1.a’ya göre daha büyük oldukları görülür. Düşük hız ve büyük yük
momenti ile çalışılması durumunda γ açısı π açısını geçer ve 2π ye kadar yaklaşır.
65
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
3.1.2.
BİR
FAZLI
-
YARIM
DALGA-TRİSTÖR
Çolakoğlu
DOĞRULTMAÇLI
TAHRİK
SİSTEMLERİ
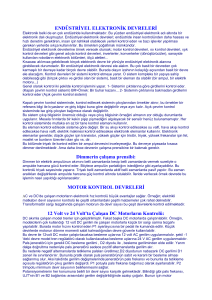
Tristör doğrultmaç üzerinden beslenen bir d.a. motorunun prensip şeması ile işletme
eğrileri Şekil 3.2’de görülmektedir. Diyot yerine tristör (thyristor) kullanılmak sureti ile,
motor endüvi devresine uygulanan doğrultulmuş gerilimin ve dolayısı ile motor dönüş
hızının geniş sınırlar içinde ayarlanabilmesi olanağı sağlanmaktadır. Gerçekten
tristörün α ateşleme açısı, değiştirilmek sureti ile doğrultulmuş gerilimin genliği
istenilen değerlere ayarlanabilir. Sistemin işletme özellikleri, bir RL yük devresinin
diyot doğrultmaçlı d.a. motor devresinin işletme özelliklerine benzer.
Şekil 3.2: Yarım dalga- tristör doğrultmaç ile beslenen d.a. motoru
a) Bağlantı şeması
b) Hız ωm endüvi akımı ia, motor uç gerilimi Vm
ve zıt e.m.k. ea’nın zamana göre değişimi.
Şekil 3.2.b’ de görüldüğü gibi ia endüvi akımının, Va kaynak geriliminin vm motor uç
geriliminden büyük olduğu α ateşleme açısında, tristör kapısına gerilim uygulanarak
akması sağlanmaktadır. ia endüvi akımı γ iletim açısı süresince akmakta ve ωt = β
açısında sıfır olmaktadır. ωt = (2π+α) gibi ikinci bir kapı darbe zamanına kadar tristör
yalıtkan özelliği göstermekte ve ia akımı akmamaktadır. Endüvi devresi
66
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
endüktansının volt-zaman alanı Vı, taranmış olarak işaretlenmiştir. ia akımının sıfıra
ulaşması halinde, pozitif ve negatif volt-zaman alanları birbirine eşit olur ve
endüktansta biriken magnetik enerji tekrar şebekeye verilerek hava aralığı magnetik
akısı tekrar ia akımının başlangıç zamanındaki durumuna gelir. Belirli bir dönüş
hızında daha büyük döndürme momenti elde edilebilmesi için α ateşleme açısı öne
alınarak ia akımının genliği ile γ iletim açısı arttırılır ve böylece tristörün yalıtkan
olduğu süre kısaltılarak hız düşümünün artması önlenir. Aynı moment değerinde
daha büyük bir hız elde edilmesi istenildiği takdirde, α ateşleme açısı öne alınır.
Öyle ki iletim zamanı, vo kaynak gerilimi genliğinin en büyük olduğu zamana en yakın
bir durumda başlatılır. İletim süresi boyunca endüvi devresi için,
vo = ia.Ra+La
dia
+ ea bağıntısı yazılabilir.
dt
Yukarıda belirtilen ifadeden,
Vm = I a. R a + E a bağıntısı bulunur.
Burada,
Vm : Motor uçlarına uygulanan ortalama gerilimi,
I a :( γ /2 π). I a ortalama endüvi akımını,
E a = Km . Ωm = Ea' endüvi ortalama zıt e.m.k.' ni,
Ωm : Motor ortalama dönüş hızını gösterir.
Elektromagnetik moment T; zıt e.m.k. ea, ve motorun elektromekanik özellikleri ile
hava aralığındaki magnetik alanın değişken olmadığı varsayımına bağlı moment
sabiti Km olduğuna göre T = Km.Ia ve ea = Km.ωm bağıntılarının yazılabileceği
bilinmektedir. Sistemin mekanik ve elektriksel büyüklükler cinsinden denge bağıntısı,
aşağıdaki gibi yazılabilir.
T= Km. la=TL+J dωm
dt
67
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Bu ifadede,
TL : Ortalama yük momentini,
J : Dönen kütlelerin- eylemsizlik momentini gösterir.
Buradan TL =Km.Ia dır.
Vm=Ia.Ra+Ea ve TL = Km.Ia eşitliklerinden görüleceği gibi alternatif akım kaynağından
tristör doğrultmaç ile beslenen bir d.a. motorunda, ortalama açısal hız Ωm
ile,
ortalama yük momenti TL, ortalama motor gerilimi Vm ve ortalama endüvi akımı Ia
arasındaki bağıntılar, bir d.a. motorunun değişken olmayan bir d.a. kaynağından
beslenmesi durumundaki bağıntıların benzeridir. Bununla beraber d.a. motorunun
doğrultmaç devresi üzerinden beslenmesi halinde Vm ortalama motor geriliminin
büyüklüğü α ateşleme açısına ve γ iletim açısına bağlı olarak değişir. İletim açısının
endüvi akımına bağlı olarak değiştiği Şekil 3.2.’ den görülür.
Yarım dalga tristör - doğrultmaçlı d.a. motor besleme tertipleri, bir tristör kullanılması
nedeni ile oldukça ucuzdur. Ancak aşağıda özetlendiği gibi işletme yönünden
sakıncalı tarafları vardır.
Bunlar;
1. Öncelikle endüvi akımı kesikli ve kısa sürelerle oluşur. Bu durumda d.a.
kaynağından motor momentine eşdeğer devamlı bir döndürme momentinin
elde edilmesi istenildiği takdirde ısınma kayıpları daha fazla olur. Bu nedenle
motorun cebri soğutma zorunluluğu belirir.
2. İletim periyodu dışındaki sürede motor dönüş hızı azalmaya yönelir. Bu
nedenle dönüş hızında dalgalanma belirir. Bütün bu sakıncaları önlemek için
üç fazlı yarım dalga tristör doğrultmaç beslemeli d.a. sistemlerinin kullanılması
tercih edilir.
68
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
3.1.3. ÜÇ FAZLI TRİSTÖR DOĞRULTMAÇLI MOTOR BESLEME SİSTEMLERİ
Gücü 5 hp.den büyük doğru akım motorlarının beslenmesi amacı ile genellikle üç
fazlı alternatif akım kaynağı kullanılır. Üç fazlı alternatif akımının doğru akıma
çevrilmesi halinde, bir periyot süresince üç faza ait pozitif dalga sinüzoitleri doğru
akıma dönüştürüldüğünden, doğrultulmuş akımın pülzasyon oranı azalır ve dolayısı
ile endüvi sargılarının aşırı ısınması ve motor dönüş hızındaki değişmeler bir
dereceye kadar sınırlandırılmış olur. Ayrıca elde edilen doğru akımın ortalama değeri,
bir fazlı alternatif akımın, doğru akıma dönüştürülmesi ile elde edilen doğru akım
ortalama değerinden daha büyük olduğundan, üç fazlı alternatif akım kaynağından
daha büyük değerde güç elde edilir. Üç fazlı doğrultmaç sistemleri iki gruba ayrılır:
a. Üç fazlı yarım dalga (Üç tristörlü)doğrultmaç
b. Üç fazlı tam dalga (Altı tristörlü) doğrultmaç sistemleri
Birinci grup doğrultmaç sisteminde, alternatif akımın yalnızca bir yöndeki periyotları,
ikinci grup doğrultmaç sisteminde ise her iki yöndeki periyotları da doğrultulmaktadır.
Böylece ikinci tip doğrultmaç sistemi ile beslenen d.a. motorlarında kaynak geriliminin
polaritesi değiştirilmek sureti ile doğru akım yönü de değiştirilerek çok çeşitli ayar
düzenleri geliştirilebilir.
3.1.3.1. ÜÇ FAZLI - YARIM DALGA TRİSTÖR DOĞRULTMAÇLI MOTOR
BESLEME SİSTEMLERİ
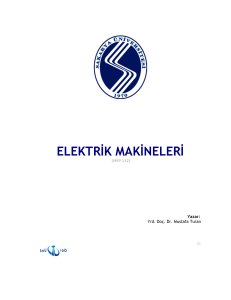
Şekil 3.3’de üç fazlı yarım dalga (üç tristörlü) tipinde bir doğrultmaç tarafından
beslenen d.a. motorunun prensip şeması görülmektedir. Doğru akım motoruna, Tı
tristörü iletken duruma geldiğinde va faz gerilimi, T2 tristörü iletken durumuna
geldiğinde vb faz gerilimi, T3 tristörü iletken durumuna geldiğinde vc faz geriliminin
pozitif periyotları uygulanır.
69
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Şekil 3.3. Üç fazlı - yarım dalga tristör doğrultmaç ve d.a. motoru prensip şeması
Tristörün α ateşleme açısı değiştirilerek, doğrultulmuş çıkış geriliminin büyüklüğü
ihtiyaca göre ayarlanabilir. Sistemin çalışma şekli şöyle özetlenebilir:
Trisörlerden birisi iletken duruma geldiğinde, diğer ikisi negatif işaretli alternatif akım
sinüzoidinin etkisi altında bulunduğundan, iki tristör aynı zamanda iletken duruma
gelememektedir. Ancak tristörlerden birisinin iletken durumdan yalıtkan, diğerinin
yalıtkan durumdan iletken duruma geçişi sırasında kısa bir süre için iki tristör aynı
zamanda iletken duruma gelir. Bu süreye komütasyon süresi denilir.
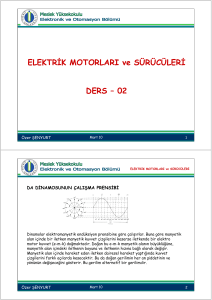
Şekil 3.4.’de üç fazlı-yarım dalga doğrultmaç sistemi ile beslenen bir d.a. motoruna
uygulanan doğrultulmuş vm geriliminin,v1 endüktans geriliminin, ea e.m.k.’nin ve ia
endüvi akımının, α ateşleme açısının 0°, 60° ve 90° değerleri için değişimleri
görülmektedir. Şekil 3.4.b ve c’de görüldüğü gibi ateşleme açısının sıfır durumunda,
ateşleme olayı van sinüzoidinin (α = 0) noktasında oluşur. Bu durumda her tristör 120°
70
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
faz farkı ile iletken hale geldiğinde ia endüvi akımı sürekli olur ve doğrultmaç çıkış
gerilimi ile motor dönüş hızı en büyük değerleri alır. Doğrultmacın direnç ile
yüklenmesi ve ateşleme açısının 150° geciktirilmesi durumunda, doğrultmaç çıkış
gerilimi sıfır olur.
Şekilden görüleceği gibi motora uygulanan vm gerilimi ve ia endüvi akımı, a.a.
frekansının üç katına eşit bir frekans ile pülzasyon yapmaktadır. Bu beslenme
şeklinde hız değişimi çok az olduğundan, ea endüvi e.m.k.’i genel olarak pülzasyonlu
olmayıp,vm motor beslenme geriliminin ortalama değerine eşit kabul edilir. Motor
besleme gerilimi vm ile, ea e.m.k.’i arasındaki farka eşit olan v1 gerilimi, sargı
endüktans gerilimi olup, şekilde taranmış alanda da görüleceği gibi, bir periyot
süresindeki ortalama değeri sıfırdır. Endüvi akımının pülzasyon genliği,endüvi devresi
endüktans değerinin büyüklüğüne bağlı olarak değişir.
Şekil 3.4.e ve f ’de görülen dalga formları, α = 60° ve endüvi akımının devamlı
akmasını sağlayacak büyüklükteki endüktans değeri için, kısmi hızlarda çalışma
durumunu gösterir.
İletkenliğin devamlı olması durumunda, motora uygulanan gerilimin etkin değeri için
aşağıdaki bağıntı elde edilir.
Motora uygulanan doğrultulmuş gerilimin etkin değeri vm, a.a. güç kaynağının faz nötr geriliminin etkin değeri vo olduğuna göre,
Buna göre α = 0° ,için Vm= 1,17vo, α = 60° için, gerilim ve hız Cosα ile orantılı
olduğundan vm = 0,5.1,17 vo =0,585v0 bulunur.Bu durumda endüvi akımı pülzasyon
71
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
genliği, α = 0° durumunda daha büyük olduğundan, her periyoda ait pülzasyonun
yutulmasına karşılık olan, endüvi endüktansı volt-zaman alanları daha büyüktür.
Şekil 3.4. Üç fazlı — yarım dalga tristörlü doğrultmaç ile beslenen da. tahrik sisteminde, motor besleme
gerilimi ve endüvi akımının ateşleme açısına bağlı olarak değişimi
a) Üç fazlı a. a.
b ve c ) α = 00
e ve f) α = 60°
72
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Şekil 3.4.h ve i’de α = 90° durumunda vm motor gerilimi ve ia endüvi akımının değişimi
görülmektedir. Endüvi devresi endüktansının yeterli büyüklükte olması durumunda, ia
endüvi akımının kesintisiz akması sağlanmakta ve motor dönüş hızı sıfır olmakla
beraber, ia endüvi akımı ile orantılı bir moment oluşmaktadır. vm motor gerilimi,
pülzasyon frekansı a.a. kaynak frekansının üç katı olan bir frekans ile ve ( + ), ( 0 ), (
- ), değerleri arasında değişir. Akımın pülzasyon genliğinin tepe değeri, ortalama
akım değerinin iki katı büyüklükte olur. Endüvi devresi endüktansının değerinin yeterli
büyüklükte olmaması durumunda endüvi akımının devamlılığı sağlanamaz. Bu
durum, Şekil 3.4 k ve i’ de görülmekte olup, motor kısmi yüklerde ve düşük hızlarda
çalışabilir.
Şekil 3.4. h ve i) α = 90°
k ve l) α = 90° (düşük hızda)
73
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Üç fazlı - yarım dalga tristör doğrultmaçlı besleme sistemlerinde endüvi akımı iletim
açılarının arttırılması amacı ile Şekil 3.5.a’da görüldüğü gibi motor endüvi uçlarına ek
olarak bir diyot bağlanır. Tristörler iletken olmadığı zaman diyot iletken duruma
gelerek endüvi uçlarını kısa devre yapar ve endüvi devre endüktansının depo ettiği
enerjinin endüvi direnci üzerine boşalmasını sağlar.
Şekil 3.5 : Üç fazlı - yarım dalga tristör ve kısa devre diyotlu doğrultmaç tahrik sistemi
a) Prensip şeması
b) Motor besleme geriliminin değişimi
c) α 90o derece için endüvi akımının değişimi
d) İletim süreleri
74
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Şekil 3.5’de görülen sistemde α = 900 için tristörler iletken oldukları sürelerde vm
motor gerilimi, a.a. faz geriliminin değişimine uyar. Tristörlerin yalıtkan, kısa devre
diyotunun iletken duruma geldiği ‘F’ süresinde ise, endüvi uçları kısa devre yapılmış
olduğundan, endüvi gerilimi sıfır olur. Gerek tristörün, gerekse diyotun iletken
olmadığı ‘0’ süresinde, vm motor gerilimi, ea endüvi e.m.k.’ne eşit olur. Kolaylıkla
görüleceği gibi, Şekil 3.4.h ‘da, α = 90° için vm motor gerilimi sıfır olduğu halde, bu
düzende α = 150° de motor besleme gerilimi sıfır olur.
3.1.3.2. ÜÇ FAZLI - TAM DALGA TRİSTÖR DOĞRULTMAÇLI MOTOR BESLEME
SİSTEMLERİ
Uygulamada birisi pozitif, diğeri negatif a.a. periyodunu ileten çift üç fazlı yarım dalga
doğrultmaç sistemleri kullanılarak, motor uçlarına iki yönlü doğru gerilimin
uygulanması sağlanır. Böylece, tristörlerin ateşleme açıları kontrol edilerek, d.a.
motorunun, her iki dönüş yönünde ve istenilen hızlarda çalıştırılma imkanı elde edilir.
Bu tür doğrultmaçlara “tam dalga köprü doğrultmaç” denilir. Şekil 3.6.a’da, 6
tristörden oluşan tam dalga köprü doğrultmaç sistemi ile beslenen yabancı uyarmalı
bir d.a. motorunun prensip şeması görülmektedir. Böyle bir doğrultmaçta yalnızca
besleme geriliminin yönü değiştirilebildiğinden, d.a. motorunun dönüş yönü
değiştirilmek sureti ile hız / moment düzleminin I ve IV üncü bölgelerinde
çalıştırılması sağlanır. Moment yönünün değiştirilmesi istenildiğinde, uyarma akımı
yönünün değiştirilmesi gerekir.
75
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Şekil 3.6: Tam dalga köprü doğrultmaç yardımı ile beslenen yabancı uyartımlı d.a. motoru prensip şemaları
a) Bir köprü doğrultmaç ile beslenen d.a. motoru ve çalışma bölgeleri
b)Ters - paralel bağlı çift köprü doğrultmaç ile beslenen yabancı uyartımlı d.a. motoru ve çalışma bölgeleri
Şekil 3.6.b’ de, 12 tristörden oluşan ve birbiri ile ters-paralel bağlı çift köprü
doğrultmaç devresi yardımı ile beslenen yabancı uyartımlı bir d.a. motoru prensip
şeması ile böyle bir besleme düzeninde, motorun hız / moment düzlemindeki çalışma
bölgeleri görülmektedir. Çift köprü doğrultmaç sisteminde hem gerilim, hem akım
yönü değiştirilebildiğinden, başka ilave bir düzeneğe gerek kalmadan d.a. motorunun,
hız / moment düzleminin I, II, III ve IV üncü bölgelerinde çalıştırılması imkanı
sağlanmaktadır. Kolaylıkla görüleceği gibi, her hangi bir bağlantı değişikliğine gerek
kalmadan, yalnızca tristörlerin ateşleme açıları kontrol edilmek sureti ile, d.a.
motorunun dönüş yönünün değiştirilmesi, frenlenmesi, hız ve moment büyüklüklerinin
iş makinesinin özelliklerine bağlı olarak ayarlanması mümkün bulunmaktadır. Bu
nedenle a.a. kaynağından köprü doğrultmaçlar yardımı ile beslenen d.a. motorları,
hassas hız ve moment kontrolünü gerektiren tekstil ve kağıt üretim tesislerinde geniş
bir kullanma alanı bulmuştur.
Şekil 3.6.c’ de, 6 tristörden oluşan köprü bağlantılı bir doğrultmaçta t tristörlerin
ateşleme açıları değiştirilmek sureti ile elde edilen doğrultulmuş çıkış geriliminin
değişimi görülmektedir.
76
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Doğrultulmuş çıkış geriliminin ortalama değerinin,
α = 30° ile 90° arasında pozitif,
α = 900 sıfır,
α = 90° ile 1500 arasında negatif olduğu görülmektedir.
Şekil 3.6.c Altı tristörden oluşan üç fazlı tam dalga köprü doğrultmaç yardımı ile, α ateşleme açısının
değişimine bağlı olarak elde edilen doğrultulmuş gerilimler
77
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Örnek:Gücü 100 hp. devir sayısı 1750 d/d. olan bir d.a. şönt motorunun endüvi
devresi direnci Ra = l4,4.10-3 ohm, endüktansı L = 1,1.10-3 H ve gerilim katsayısı Km
= 1,27 volt.san/rad. dır. Motor, faz arası gerilimi 480 V. olan bir a.a. kaynağından,
yarım dalga-tiristor doğrultmaç ile beslenmekte olup endüvi akımı anma değeri la =
340 A’ dır.
Buna göre;
a) 1750 d/d. anma dönüş hızının sağlanabilmesi için α ateşleme açısının değerini
bulunuz. (Tristörün iç gerilim düşümünün I.V ve iletimin kesintisiz olduğu
varsayılacaktır.)
b) α = 90° için endüvi akımının pülzasyon genliğini bulunuz. (Motorun anma endüvi
akımı ile yüklendiği ve hareketsiz olduğu varsayılacak, ayrıca Ra endüvi direnci ihmal
edilecektir.)
Çözüm:
a) 1750 d/d. anma dönüş hızının sağlanabilmesi için α ateşleme açısının değerini
Kaynağın faz-nötr geriliminin etkin değeri Vo = 480/ 3 = 277 V olup
bağıntısına göre motor ortalama geriliminin etkin değeri,
78
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Bu değere tiristor iç gerilim düşümü I.V ve Ia.Ra endüvi devresi omik gerilim düşümü
olarak 4,9 V. eklendiğinde 238 V. bulunur. Buna göre ateşleme açısı,
Cos α = 238 / 325 = 0,735 α = 43° bulunur.
b) α = 900 de endüvi devresine uygulanan gerilim Şekil 3.4.h’da görüldüğü ibi
taranmış alana eşit olan endüvi devresi endüktans gerilimidir. Endüvi akımının ∆Ia
artış değeri wt = 2π/3 ve La endüvi devresi endüktansı göz önünde tutulmak sureti ile
ve aşağıdaki şekilde bulunur.
w = 314 rad./san. ve La = 1,1.10-3. H. değerleri göz önünde tutularak, endüvi
akımının pülzasyon tepe değeri la = 566 A. ve
α = 90° için (1/2) la = 283 A. bulunur.
Endüvi akımı ortalama değeri 340 A. olduğundan hiç bir zaman sıfır değerine
ulaşılamamakta ve dolayısı ile endüvi akımı devamlı olmaktadır.
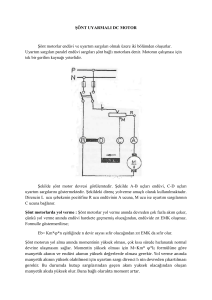
3.1.4. DEVRE KESİCİLER YARDIMI İLE DOĞRU AKIM MOTORLARINDA HIZ
KONTROLÜ
Doğru akım kaynağından beslenen d.a. motorlarında, hız kontrolü için yarı iletken
devre kesiciler kullanılabilir. Özellikle d.a. kaynağından beslenen endüstriyel tahrik
sistemlerinde, troley ve elektrikli demir yolu cer sistemlerinde kullanılan bu düzenin
çalışma prensibi, motor endüvi devresi ile güç kaynağı arasındaki bağlantının bir
devre kesici yardımı ile saniyede bir kaç yüz defa açılıp kapanması esasına dayanır.
79
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Bu düzenin özellikleri arasında, verimin yüksek olması, hızın devamlı kontrol
imkanının
sağlanması
ve
motorun
gerekli
durumlarda
bir
üreteç
olarak
frenlenebilmesi söylenebilir.
Bir d.a. motorunun devre kesici yardımı ile hız kontrolüne ait prensip şeması Şekil
3.7’de görülmektedir. Böyle bir düzen yardımı ile motor uç geriliminin etkin değeri sıfır
ile Vo arasında değiştirilebilir. Bu düzen devreye seri olarak bağlı bulunan tristör,
devre kesici görevini yapar ve endüvi devresini saniyede bir kaç yüz defa açar ve
kapar. Endüvi devresinin kapalı kalma süresi (t1) ile açık kalma süresi (t2) istenildiği
şekilde azaltılıp çoğaltılarak motora uygulanan gerilimin Vm etkin değeri ve dolayısı ile
motor dönüş hızı istenilen değerlere ayarlanır. Devrenin kesilebilmesi için iletken
durumda olan tristörün yalıtkan duruma gelmesi gerekir. Bu amaçla şekilde
komütasyon anahtarı ile gösterilen bir komütasyon devresi kullanılır. Böylece tristörün
katot ucuna kısa bir süre için (örneğin 40 mikrosaniye) pozitif kaynak gerilimi
uygulanarak yalıtkan duruma gelmesi sağlanır.
Şekil 3.7. Bir d.a. motorunun devre kesici yardımı ile hız kontrolü
Şekil 3.8 ve Şekil 3.9 ‘da devre kesici ile çalışan bir kontrol düzeninde, motora
uygulanan gerilim ve akımın (tı) uygulama ve (t2) kesme zamanlarına bağlı olarak
değişimleri görülmektedir. Şekil 3.8’de görüldüğü gibi, kaynağın devrede kalma
80
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
süresi, devre dışı kalma süresine göre daha kısa tutularak motora uygulanan
gerilimin Vm etkin değeri 0,2Vo değerine düşürülmüştür.
Şekil 3.8. Düşük hız ayarında motor gerilimi ve endüvi akımının değişimi
Devre kesici olarak çalışan tristör iletken duruma geldiğinde, güç kaynağından belirli
iki sınır arasında değişen bir ia yük akımı çekilir. Endüvi devresi endüktansı nedeni
ile, Vo kaynak gerilim ile ea endüvi e.m.k.’i arasındaki farktan doğan ve şekilde
taranmış olarak gösterilen volt -zaman, alanına eşdeğer bir enerji yutulur: (tı) iletim
zamanı bitiminde kd diyotu iletken duruma gelerek endüvi devresini kendi üzerine
kısa devre yapar ve bu enerjinin endüvi devresi üzerine boşalmasını sağlar. Motor
işletme geriliminin etkin değeri, t1, t2 zaman aralıkları oranına bağlı olarak
değiştirilmek sureti ile motor dönüş hızı, geniş sınırlar içinde ve devamlı bir şekilde
ayarlanır.
Örneğin Şekil 3.9’ da görüldüğü gibi t2 zaman süresi çok kısaltılarak Vm geriliminin
kaynak gerilimine yakın bir değere ayarlanması sağlanmıştır. Ayrıca her iki şekilden
de görüleceği gibi, endüvi akımı, La ortalama endüvi akımının altında ve üstünde
bulunan iki sınır değeri arasında ve doğrusal olarak değişir.
81
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
Şekil 3.9 Yüksek hız ayarında motor gerilimi ve endüvi akımının değişimi
Devre kesicilerle gerilim ve hız ayarı yapılan d.a. motorlarında, endüvi devresinin
enerji depo edebilecek yeterli bir endüktans değerine sahip olması gerekir. Genellikle
seri uyarmalı motorlarda uygulanan bu düzende, seri uyarma sargısı ile yeterli
endüktans değeri sağlanabilir. Şönt uyarmalı motorlarda ise, uyarma sargısı
doğrudan d.a. kaynağına bağlanarak ve endüvi devresine dışardan seri olarak yeterli
büyüklükte endüktans bağlanmak sureti ile aynı kontrol sistemi uygulanabilir. Devre
kesiciler, ya darbe (pulse) süresi veya darbe frekansının değişken olması esasına
göre çalışırlar. Motor yük akımı La ile çalışma gerilimi Vm, birbirinden bağımsız
olduklarından motor dönüş hızı ayarı, endüvi geriliminin ayarı yardımı ile
sağlanmaktadır.
Örnek:Gücü l00hp., yük akımı 180 A. olan seri uyarmalı bir d.a. motoru, gerilimi 500
V. olan bir d.a. kaynağından beslenmekte ve hız ayarı devre kesici yardımı ile
sağlanmaktadır. Endüvi ve uyarma devreleri toplam endüktansı 0,060 H. dır. Bu
düzende t1 / (t1 + t2) oranının en küçük değeri 0,20 olduğuna göre, endüvi akımının
etkin değeri etrafında 10 amperlik bir salınım yapması için gerekli darbe frekansını
bulunuz.
Çözüm:
Darbe zaman aralığı oranı 0,20 olduğuna göre;
*Endüvi ortalama e.m.k. değeri = 0,20 . 500 = 100V olur.
82
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
Çolakoğlu
*Endüktansa uygulanan volt - zaman alanının değeri = (500-100) t1= 400 t1
volt.saniye
*Endüvi akımı artış değeri = ∆ia = 400 tı /0,060 = 10 A. şeklinde ifade edilir.
t1=0,060.10/400= l,5.l0-3 saniye ve
tı+ t2 = l,5.10-3/ 0,2 = 7.5.10-3 saniye ve darbe frekansı 1/7,5. 10-3 = 133 darbe /
saniye bulunur.
83