ASENKRON (İNDÜKSİYON)
MOTOR
Genel
Tek fazlı indüksiyon motoru
• Asenkron makinalar motor ve
jeneratör olarak
kullanılabilmekle birlikte,
jeneratör olarak kullanım rüzgar
santralleri haricinde yaygın
değildir.
Kapasite
• Genellikle sanayide kullanılan
asenkron makinalar sincap
kafesli motorlardır.
Şaft
Bilgi levhası
• Hem tek faz, hem de 3 fazlı
olarak kullanımı yaygındır.
Bağlantı kutusu
27.12.2012
Asenkron motorlar
•
1
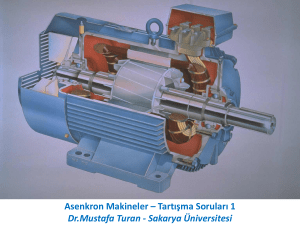
ASENKRON MOTOR
• Statorun (sabit kısım) yapısı
– İnce tabakalardan oluşan ve
yarıklara sahip demir nüve
– Bobinler yarıklara yerleştirilerek tek
veya 3 fazlı sarımlar elde edilir.
• Sincap kafesli rotorun
(hareketli kısım) yapısı
– İnce tabakalardan oluşan ve
yarıklara sahip demir nüve
– Metal çubuklar yarıklara döküm
suretiyle yerleştirilmiştir.
– İki halka çubukları kısa devre eder.
– Çubuklar gürültüyü azaltmak
amacıyla eğimli olarak
yerleştirilirler.
27.12.2012
Asenkron motorlar
•
2
ASENKRON MOTOR
Tel sargı rotorun yapısı
Kesit görünüm
•
•
•
•
3 fazlı sargılar yarıklara
yerleştirilir.
Demir nüveli stator
Sargılar wye (yıldız) veya üçgen
şeklinde bağlanır.
Her faz sargısının ucu şaftın
üzerine yerleştirilmiş bir halkaya
bağlanır. 3 fırça bu halkalara
temas eder.
Rotor sargıları değişken bir direnç
üzerinden veya ayrı bir güç
kaynağı vasıtası ile beslenir.
Yarıklar
Phase
C
Phase
A
Sargılar
3 fazlı sargılar
BA+
C+
Halkalar
C-
Phase
AB+
B
Şaft
27.12.2012
Asenkron motorlar
•
3
ASENKRON MOTOR
Statorun Yapısı
Demir nüveli stator
• Halka şekindeki nüve
motorun kasasına
bağlanır.
• Bobinler yarıklara
yerleştirilir ve bu bölümler
sıkıştırılarak kapatılır.
• Yüksek gerilim
motorlarında kullanılan
bobinler kurutulur ve yağ
emdirilir.
27.12.2012
Asenkron motorlar
•
4
ASENKRON MOTOR
Statorun Yapısı
Stator sargılarının
yerleştirilmesi
• Bobinler izole bakır iletken
(enamel) kullanılarak imal
edilirler.
Bobin sonu
Tape-wound
coil insulation
• İzole bobinler statordaki
yarıklara yerleştirilir.
Bobinin yanal bölgeleri
• Bobinin her iki tarafı elektriksel
olarak yaklaşık 180o‘lik açı
oluşturacak şekilde
yerleştirilmiştir.
Bobin sonu
Bobinin bağlantı uçları
27.12.2012
Asenkron motorlar
•
5
ASENKRON MOTOR
Tel sargı rotor
27.12.2012
Sincap kafesli rotorun yapısı
Asenkron motorlar
•
6
ASENKRON MOTOR
3 fazlı motorların çalışma prensibi
• Stator 3 fazlı gerilimle beslenir ve sargılardan 3 fazlı simetrik
akım geçer.
• 3 fazlı akım döner bir manyetik alanın oluşumunu sağlar.
• Manyetik alan senkron hızda döner. Alanın dönme hızı (ns)
şebeke frekansı (f) ve çift kutup sayısı (p) ile kontrol edilir.
• ns = f / p (1 saniyedeki devir sayısı)
• ns = (f * 60 )/ p (1 dakikadaki devir sayısı)
• Döner alan kısa devre edilmiş rotor iletkenlerinde gerilim
meydana getirir.
• Elde edilen gerilim çubuklardan akım akmasına neden olur.
27.12.2012
Asenkron motorlar
•
7
ASENKRON MOTOR
3 fazlı motorların çalışma prensibi
• Stator manyetik alanı ve rotor akımı arasındaki etkileşim motoru
(rotoru) çeviren kuvveti üretir. (Kuvvet = B I L sin φ)
• Elde edilen gerilimin genliği döner alanın ve rotorun dönüş hızının
farkına bağlıdır.
• Hız farkı rotorun durma konumunda yüksek akım çektiği durumda
maksimum olur. Bu durumda rotor akımının frekansı 50 Hz’dir.
• Demeraj sonrası rotor hızlandıkça aradaki fark azalır ve sonuçta:
– Rotorda endüklenen gerilimin frekansı azalır.
– Rotor akımının ve endüklenen gerilimin genliği azalır.
27.12.2012
Asenkron motorlar
•
8
ASENKRON MOTOR
Kuvvet oluşumu
• Döner alan
çubuklarda akım
oluşturur.
• Oluşan kuvvet
motoru
döndürür.
• L rotorun
uzunluğudur.
27.12.2012
Asenkron motorlar
•
9
ASENKRON MOTOR
3 fazlı motorların çalışma prensibi
• Rotor hızıstatorun açısal döner açısal hızına eşit
olduğunda oluşan gerilim, akım ve moment (tork)
değerleri sıfır olur. Motor (rotor) hızı senkron açısal
hızdan düşük olmalıdır.
• Hız farkına kayma (s) adı verilir
s = (ns - nr) / ns
olup ns = f / p (devir/s)
Rotor akımının frekansı: fr = s f
•
• Nominal çalışma şartları altında kayma 1% ile 5 %
arasında gerçekleşir.
27.12.2012
Asenkron motorlar
•
10
ASENKRON MOTORLARA
YOL VERME YÖNTEMLERİ
• 1. Direkt yol verme:
* Motorun sargılarına şebeke gerilimi bir
anda tam değeriyle tatbik edilir.
* Sadece küçük güçlerdeki motorlarda
(max. 6BG) kullanılır.
* Demeraj akımı yüksek değerlere çıkabilir.
27.12.2012
Asenkron motorlar
•
11
ASENKRON MOTORLARA
YOL VERME YÖNTEMLERİ
• 2. Yıldız-Üçgen Şalterle Yol verme:
* Faz sargısının uçlarına nominal gerilimden √3
kat düşük gerilim tatbik edilir.
* Motor demarajı bitirince nominal gerilim
uygulanır. Önce yıldız bağlanır, sonra otomatik
olarak veya el ile üçgen bağlantıya geçilir.
* Başlangıç akımı ve momenti düşüktür.
* Üçgene geçildikten sonra tam yük verilir.
27.12.2012
Asenkron motorlar
•
12
ASENKRON MOTORLARA
YOL VERME YÖNTEMLERİ
• 3. Stator reostası ile yol verme:
* Faz sargılarına seri dirençler bağlayarak
stator gerilimi düşürülür.
* Motor hızlandıkça direnç değeri azaltılır,
en sonunda tamamen devreden çıkartılır.
* Motor sadece az yükle kalkış yapabilir.
27.12.2012
Asenkron motorlar
•
13
ASENKRON MOTORLARA
YOL VERME YÖNTEMLERİ
• 4. Ototransformatör ile yol verme:
• Şebeke gerilimi özel bir transformatörle
düşürülür.
• Motor ancak yüksüz olarak kalkabilir.
27.12.2012
Asenkron motorlar
•
14