Akademik Bilişim’11 - XIII. Akademik Bilişim Konferansı Bildirileri
2 - 4 Şubat 2011 İnönü Üniversitesi, Malatya
Mayın Tarama ve Bomba İmha Sistemlerinin
Tek Robot Üzerinde Modernizasyonu
Harun Sümbül1, Akif Coşkun2
Gümüşhane Üniversitesi, Elektrik-Elektronik Mühendisliği Bölümü, Gümüşhane
TRT Genel Müdürlüğü, Ankara
habu_58@hotmail.com, akif.coskun@trt.net.tr
1
2
Özet: Bu çalışmada, arazi tarama özelliğine sahip uzaktan kumanda edilebilen mikrodenetleyicili
bir robot tasarımı yapılmıştır. Aynı zamanda sistem, bulduğu bombaya müdahale edebilen bir
kola da sahiptir. Kumanda sistemini bir konsol görevi gören klavye oluşturur. Klavye bilgilerini
yorumlayıcı mikrodenetleyici aynı zamanda grafik LCD’ ye bağlıdır. Robot hakkında bilgiler buradan sunulmaktadır. Klavye bilgileri RF verici ile taşınmakta ve alıcı vasıtası ile ana kart ünitesine gönderilmektedir. Ana kart üzerinde alınan verileri mikrodenetleyici yorumlamakta ve hareket
ünitesine vermektedir. Robot üzerinde birçok algılayıcı mevcuttur. Bunlardan en önemlisi MIR
(Micropower İmpulse Radar)’ dır. Robot üzerinde bulunan bu algılayıcılardan gelen verilerde ana
kart üzerinde yorumlanmaktadır.
Anahtar Sözcükler: Mayın tarama, MIR, Bomba İmha, Robot.
Modernization of Mine Scan and Bomb Disposal Systems the on a Robot
Abstract: In this study, the land capable of scanning a microcontroller can be remotely controlled
robot has been designed. At the same time, the system can intervene to find a lever that also has
a bomb. Control system, creates the keyboard that serves as a console. The microcontroller that
interpreting the keyboard informations, has related graphic LCD screen at the same time. Here is
presented information about the robot. Keyboard information are moving with via RF transmitter and sending motherboard unit with via receiver. Microcontroller interprets the data received
on the motherboard and provides motion unit. There are many sensors on the robot. The most
important is MIR (Micropower Impulse Radar). In the data from the sensors on the robot which
is interpreted on the motherboard.
Keywords: Mine Clearance, MIR, Bomb Destroy, Robot.
1. Giriş
olarak yapılmaktadır.
Mayın tarama ve bomba imha sistemleri
üzerine birçok çalışma yapılmakta ve bu tip
uygulamalarda genellikle RF veya kızılötesi
gibi kısa mesafeli ve düşük güvenliğe sahip
haberleşme yöntemleri tercih edilmektedir.
Bu tip sistemlerin kontrolü, kullanıcı tarafından manuel olarak veya çizgi, ışık ve ses takibi gibi çeşitli yöntemler kullanılarak otomatik
Bu çalışmada, arazi tarama özelliğine sahip
uzaktan kumanda edilebilen mikro denetleyicili bir robot tasarımı yapılmıştır. Uzaktan kumanda sayesinde şüpheli alan insan müdahalesi
olmadan taranır ve alan ile ilgili bilgi toplanır.
Robot tipi paletli bir robot tipidir. Böylece iki
kullanımı sayesinde farklı yapıda özellikleri
üzerinde bulundurmaktadır.
39
Mayın Tarama ve Bomba İmha Sistemlerinin Tek Robot Üzerinde Modernizasyonu
Harun Sümbül, Akif Coşkun
2. Robot Sistemi ve Donanımsal İncelenmesi
Kara mayınının tespiti ciddi bir askeri ve insani problemdir. Önceki savaşlardan kalma mayınlar yüzünden dünya çapında her hafta bine
yakın insan ölmüş ya da sakat kalmıştır. MIR,
toprak altına gömülmüş hem plastik hem de
mekanik kara mayınlarını belirleyebilir. Çok
küçük boyutları, düşük maliyeti elde kolaylıkla taşınabilmesi ve araçlara monte edilebilmesinden dolayı bu teknoloji oldukça caziptir.
Çünkü yerdeki parazitten, mayını ayırt etmesine yardımcı bir dizi tarafından görüntüler biçimlendirilmiştir. Şu an bir lap top bilgisayar,
bir görüntüyü 10 saniyeden daha az bir sürede
yeniden işleyebilir fakat daha yüksek hızlar da
mümkündür. Yapılan çalışmalar kesin olarak
göstermiştir ki; MIR, 2-D görüntü içerisine gömülmüş mayınları kolayca belirleyebilir fakat
3-D görüntüleme, mayını daha güvenlikli bir
şekilde tespit için gerekli olabilir [2].
Sistemde hem mekanik yapı hem de elektronik
yapı mevcuttur. Bu birleşimin ilk bölümü olan
paletli kısım metal ve Polialtetal ham maddeli
makaralardan oluşturulmuştur. Metal kısmın ana
parçaları ve yüzeyleri lazer kesimi olup torna
ve frezede işlenerek kullanışlı hale getirilmiştir.
Yardımcı aksamlar ise demir çubuklar sayesinde
argon kaynak ile kaynatılmıştır. Böylece sağlam
bir gövde elde edilmiştir. Yanlara işlenen raylar
sayesinde ise plastik silindirler (Polialtetal ham
maddeli) eklenmiş ve hareket aksamı oluşturulmuştur. Kontrol bölümünde 16F877 mikro denetleyicisi ile giriş ve çıkış ünitelerine işlem kabiliyeti kazandırılmıştır. Bu hareketli yapıya uzaktan
kontrol eklenerek kumanda edilmiştir [1].
2.1 MIR (Micropower Impulse Radar)
MIR, 1990’ lı yıllarda Amerika da Lawrence
Livermore ulusal laboratuarında geliştirilmiş
ümit verici bir teknolojidir [4]. MIR sensorları,
kredi kartı boyutlarındadır ve çok çeşitli kullanım alanlarına sahiptir. Bunlar; medikal, radar
izleme, ses tanıma, iletişim, askeri uygulamalar, güvenlik ve mayın bulma.
Uzaktan kontrollü bir aracın önüne takılmış
MIR modellerinin bir doğrusal dizisi, anti tank
(tanksavar) ve anti personel (insan öldürücü)
mayınları tespit edebilir. Yoğun topraklı veya
engebeli arazilerde bile, taşınabilen mayın tespit
sistemi bugünün teknolojisi ile mümkündür.
MIR vericisi saniyede 2 milyon hızında geniş
bant radar sinyalleri yayar. Bu hız özellikle bir
gürültü devresi tarafından random hale getirilmiştir. Bileşenlerin oluşturduğu verici, saniyenin 50 triyonda birinden daha kısa bir zaman (50
ps) yükselmesi ile kısaltılmış ve keskinleştirilmiş elektriksel sinyalleri gönderebilir. Bu sinyal
detektör devresi kullanan alıcı, yalnızca birkaç
santimetreden, metrelerce mesafeye kadar önceden belirlenmiş (gidiş-geliş gecikme zamanı)
alan içindeki objelerden ekoları yakalayabilir.
Şekil 2. MIR tarafından iletilmiş bir pulse
Minimum metal antipersonel mayın algılama
ve metalik enkaz, mevcut metal detektörleri ile
zor ayırt edilebilmektedir. Birkaç umut verici
yeni teknoloji gelişmektedir fakat tek bir sensor, her mayın çeşidini bulabilmek için yeterli
olmayacaktır. Bu yüzden yeni sensor füzyonlarına ihtiyaç duyulmaktadır [5].
Şekil 1. MIR
40
Akademik Bilişim’11 - XIII. Akademik Bilişim Konferansı Bildirileri
2 - 4 Şubat 2011 İnönü Üniversitesi, Malatya
2.3. RF Ünitesi
433Mhz alıcı-verici kiti [7] alınarak seri iletişim protokolü ile klavye sayesinde bomba
imha robotu ana kartı ile veri iletişimi sağlanmıştır. Klavye için hazırlanmış sürücü yazılımı
PIC18F452 denetleyici üzerinde çalışmaktadır.
Böylece klavyeden girilen tuş kombinasyonları denetleyici vasıtası ile kablosuz verici kitine
aktarılmıştır. Alıcı kit aynı şekilde bir denetleyici yardımıyla gelen verileri çözümleyerek ana
karttaki denetleyiciye göndermektedir. Böylece
hareket üniteleri uzaktan kontrol edilmektedir.
2.4. Algılayıcılar
2.4.1. Sınır anahtarları
Şekil 3. tipik bir plastik anti tank mayını [3].
Şekil 5. Sınır anahtarı
RF
Kumanda
Hareketli sistemlerde bir hareketin durdurulduğu başka bir hareketin başlamasına yarayan
devre elemanına sınır anahtarı denir [8]. Robotun kol sisteminde hareketin sonlanması ve
çarkların sıkışmasını önlemek için hareketin
sonlandığı noktalara sınır anahtarları yerleştirilmiştir. Sınır anahtarlarından alınan anahtarlama bilgileri sayesinde otonom bir şekilde
hareket sonlandırılmaktadır.
MCU
Algılayıcılar
Hareket üniteleri
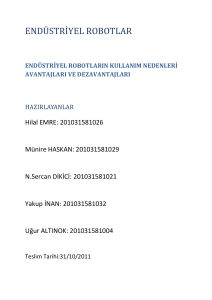
2.2. Kontrol Ünitesi
MIR
Şekil 4. Kontrol Blok Diyagramı
2.4.2. Fotoseller
Paletli sistem (tank) üzerine yerleştirilmiş LDR
(light dependent resistor) sayesinde karanlık
ortamlarda otomatik olarak ışıklandırma sistemini devreye sokmaktadır. Böylece ön ve arka
kısımlar açık bir şekilde aydınlatılmıştır.
Şekil 4’ de görüldüğü gibi devrede etkin olarak
iki entegre bulunmaktadır. PIC16F877 sayesinde giriş siteminde bulunan RF kumanda, algılayıcı ve metal detektöründen alınan bilgiler ile
hareket üniteleri kontrol edilmiştir. PIC16F877
yazılımı için pic basic pro derleyicisi [6], dolayısıyla basic yüksek seviyeli dili kullanılmıştır.
L298 motor kontrol entegresi ise paletli hareket sistemini çok yönlü olarak mikro denetleyiciden aldığı bilgiye göre yönlendirmektedir.
L298 motor kontrol entegresi ise paletli hareket sistemini mikro denetleyiciden aldığı bilgiye göre yönlendirmektedir.
2.4.3. Mikro denetleyici
Mikrokontrolörler (mikrodenetleyiciler) tek bir
silikon yonga üstünde birleştirilmiş bir mikroişlemci, veri ve program belleği, sayısal (lojik)
giriş ve çıkışlar (I/O), analog girişler ve daha
fazla güç veren ve işlev katan öteki çevre birimleri barındıran mikrobilgisayarlardır [9].
41
Mayın Tarama ve Bomba İmha Sistemlerinin Tek Robot Üzerinde Modernizasyonu
Harun Sümbül, Akif Coşkun
3.2. Kol Sistemi
Robot kol paletli sisteme vidalar ile sağlam
bir şekilde adapte edilmiştir. Bağlantı yerinde
hareket olmayıp hareketi tek eksenlidir. Bu
hareket fünye taşıma ve kamera görüntüsü açısından yeterli olup bir eklem sonrasında robot
eli adapte edilmiştir. Robot kolun ekleminde
DC servo motor kullanılmıştır. Sürücü devresi ile kolun X ekseninde hareketi sağlanmıştır.
Kolun aşağı hareketini FET, yukarı hareketini
ise ROLE üzerinden yapmaktadır. Bu hareket
çarklı sistemi ile kol aksamına uygulanmıştır.
Kullanılan işlemcinin önemli özellikleri aşağıdaki gibidir.
• 8 tane 10 bit analog sayısal çevirici
• 33 giriş çıkış portları
• 8 K flash program bellek
• 2 tane capture/compare/PWM devresi
PIC 16F877 mikrokontrolörü 20 Mhz kadar bir
saat hızında çalışabilir. Bu hızda çalışıması halinde komut saykılı 200ns kadardır. RISC yapısına
sahip olan bu mikrokontrolörün sadece 35 tane
tek kelimelik komutu vardır. PIC16F877 mikrokontrolörün 14 tane kesme kaynağı bulunur.
3.3. El Sistemi
Yukarıda bahsedilen DC servo motor sürücü
devresi el açma-kapama hareketi için de kullanılmıştır. Motor çarklı sisteme etki ederek
çene yapısına benzeyen elin tek çenesine hareket vermektedir. Ağız kısmının diğer parçası
sabittir (Şekil 7).
PIC 16F877 mıkrokontrolörün port kontrolü
PIC16F84 gibi çalışmaktadır. PORT A PORT B
PORT C PORTD VE PORT E olmak üzere 5 tane
sayısal portu bulunmaktadır. PORT A pinleri analog sayısal çevirici giriş pini işlevini de görmektedir. PIC16F877 mikrokontrolörün PIC16F84 de
bulunan yazmaçlara göre daha fazla yazmacı ve
özel fonksiyon yazmaçları bulunmaktadır [10].
3. Hareket Üniteleri
3.1. Paletli Sistem
Şekil 6’ da görüldüğü gibi paletli yürüyen aksamda hareket için iki adet DC servo motor bulunmaktadır. DC servo motorlar için PIC16F877
mikrokontrolör kullanılmış ve mikrokontrolör
4MHz bir kristal ile çalıştırılmıştır. Mikrokontrolörün donanımsal olarak CCP1 ve CCP2 bacaklarında PWM çıkışları bulunmaktadır [11].
Bu çıkışlar L298’in enable girişlerine uygulanmış ve hız kontrolü yapılmıştır.
Şekil 7. Robot El
4. Sonuçlar ve Öneriler
Bu çalışmada,; çok fonksiyonlu mayın tarama
Robotu tasarlanmıştır. Robotun gövde kol el
ve mayın tarama özellikleri PIC mikrodenetleyici ile kontrol edilmiştir. Sistem, üzerindeki algılayıcılar sayesinde oldukça fonksiyonel
hale gelmiştir. Özellikle üzerindeki MIR ile,
mayın dedektasyon işlemi sorunsuz gerçekleşmektedir. Düzenek iki kısımdan oluşmaktadır:
birinci kısım; PIC 16F877 ile çalışan kontrol
ünitesi, ikinci kısım ise kumanda ünitesidir.
Mikrodenetleyicili kısmı programlama da PIC
BASIC PRO ve MicroCode Studio; kumanda
Şekil 6. Paletli Sistem
42
Akademik Bilişim’11 - XIII. Akademik Bilişim Konferansı Bildirileri
2 - 4 Şubat 2011 İnönü Üniversitesi, Malatya
[5] Gros B., and Bruschini C., “Sensor technologies for the detection of antipersonnel mines
A survey of current research and system developments”, (ISMCR’96), Brussels, 9-11 May
1996
kısmında RF kiti kullanılmıştır. PIC ile kontrol
edilen bölüm dört ana üniteden oluşmaktadır.
Bunlar kol gövde, el ve mayın tarama üniteleridir. Tasarlanan sistem ile artık insan zafiyeti
olmadan, şüpheli paketlerin açılması ve şüpheli arazilerin taranması çok kolay ve kayıpsız bir
hale gelmiştir.
[6] Doğan İbrahim, Pic basic programlama
ve projeleri ,Bileşim Yayınları 37, Teknik 12,
2001
5. Kaynaklar
[7] Behzad Ravazi, RF MicroElektronics,
Prunter Hell Ptr, 1998
[1] C. Akif, P. Nurdan, C. Mehmet, S.Tahir,
“BOMBA İMHA VE MAYIN TARAMA ROBOTU”, OUS 2008 Teknik Eğitim Faküteleri
VII. öğrenci Sempozyumu, (2008).
[8] T.C. Milli Eğitim Bakanlığı, MEGEP,
Elektrik Elektronik Teknolojisi, Asenkron motor kumanda teknikleri, Ankara, 2007.
[2] S Azevedo, TE McEwan Science & Technology Review – January / February Lawrance
Livermore National Laboratory,1996.
[9] T.C. Milli Eğitim Bakanlığı, MEGEP,
Bilişim Teknolojileri, Mikrodenetleyiciler, Ankara, 2007.
[3] S.G. Azevedo, D.T. Gavel, J.E. Mast, J.P.
Warhus, “Lanmine Detection and Imaging
Using MIR”, Lawrance Livermore National
Laboratory, August 7, 1995.
[10] N. C.Braga, Robotik Mekatronik Ve Yapay Zeka, Bileşim Yayınları 209, Teknik 538.1.46, 2002
[4] P. K. Dutta, Defense Advanced Research
Projects Agency (DARPA) contract OSU-RF
#F33615-01-C-1901
[11] Doğan İbrahim, Pıc C Motor Kontro Projeleri, Bileşim Yayınları 70, Teknik 23
43