TMH
ULAŞTIRMA -TRAFİK
MÜHENDİSLİĞİNDE YENİ
YÖNTEMLER: BULANIK MANTIK
TEKNİĞİ UYGULAMALARI
Yetiş Şazi MURAT (*)
1. GİRİŞ
Ulaştırma, toplumların gelişmesi, medeniyetin ve iletişim seviyesinin artması ve hayatın devamlılığı açısından oldukça önemli işlevleri olan bir bilim dalıdır.
Ulaştırma mühendisliği kavramı, kendi içinde pek çok
ulaşım türünü kapsamakta ve genel olarak bir çok
mühendislik dalında olduğu gibi ulaştırma mühendisliğinde de planlama, tasarım ve uygulama boyutlarında hizmet üretilmektedir. Ulaşım veya ulaştırma
mühendisliği, İnşaat Mühendisliği’nin beş ana bilim
dalından birisi olarak gelişmiştir. Ancak günümüzde,
İnşaat Mühendisliği’nin her bir alt bilim dalı ayrı birer
mühendislik dalı olarak kabul edilir hale gelmiş ve
hatta kendi içinde alt bilim dallarına ayrılmıştır.
Trafik
Mühendisliği
kavramı,
Ulaştırma
Mühendisliği’nin kapsamında, Amerika ve Avrupa’da
gelişmiş ve ülkemize 1940’lı yıllarda girmiştir.
Ülkemizde, lisans ve lisans üstü düzeyde, pek çok
üniversitede Trafik mühendisliği konusunda dersler
verilmekte ve İnşaat Mühendisi adaylarına trafik
mühendisliği anlatılmaktadır. Trafik mühendisliği alanında tüm dünyada çok çeşitli çalışmalar yapılmakta
ve gün geçtikçe karmaşık hale gelen trafik sorunlarına çözüm arayışları devam etmektedir. Nüfus ve
gelir düzeyinin artışı, toplu taşımacılık hizmetlerinin
yeterince geliştirilmemesi ve cazip hale getirilmemesi ve yeterince gelişemeyen ulaşım bilinci, otomobil sahipliği ve kullanımını artırmakta, bu artışa
karşılık planlama eksikliği nedeniyle önlem alınmadığı/alınamadığı için yetersiz kalan altyapı nedeniyle
trafikte sorunlar meydana gelmektedir. Trafik yönetimi, ulaşım ve trafik problemlerinin çözümü, ulaşım
altyapısının kamu yararına en verimli biçimde kullanımının sağlanması gibi pek çok konu trafik mühendisliğinin çalışma konuları arasındadır. Bu amaçla
trafik mühendisliğinde mevcut yöntemlerin yanında
daha iyi sonuçlar verebilecek, problemi daha sağlıklı
tanımlayabilecek veya en uygun (optimum) çözümlere ulaşmayı sağlayacağı düşünülen yeni yön(*) Yrd. Doç. Dr., Pamukkale Üniversitesi, İnşaat Müh.
Bölümü, Denizli (ysmurat@pamukkale.edu.tr)
temler kullanılmaktadır. Bulanık mantık tekniği, söz
konusu yeni yöntemler arasındadır ve özellikle insanın düşünme, karar verme ve denetim mekanizmalarının modellenmesi ile geliştirilmiştir. Bu yöntem
pek çok disiplinde uygulama alanı bulmuş ve başarılı
sonuçlar elde edilmiştir.
Bu çalışmada, bulanık mantık tekniği kısaca tanıtılarak, trafik mühendisliği kapsamındaki uygulamaları
ve geliştirilen modeller anlatılacaktır. Bu çerçevede,
ikinci bölümde bulanık mantık tekniğinin gelişimi ve
yapısı verilmiş, üçüncü bölümde ise trafik mühendisliğindeki uygulamaları anlatılmıştır, dördüncü ve son
bölümde ise tanıtılan modellerin uygulanabilirliği tartışılmış ve bunun ışığında gelecekte geliştirilebilecek
yeni modeller ve sistemler sıralanmıştır.
2. TRAFİK MÜHENDİSLİĞİNDEKİ
UYGULAMALAR
Bulanık mantık tekniğinin çok geniş olan uygulama
alanlarından birisi de, ulaşım-trafik mühendisliğidir.
Trafik mühendisliği kapsamındaki problemlerin çözümünde özellikle belirsizlik içeren yaklaşımların yerine
bulanık mantık tekniği uygulanmış ve başarılı sonuçlar elde edilmiştir. Bu uygulamalar aşağıda çeşitli
başlıklar altında sıralanmıştır.
2.1. Trafik Sinyal Denetimi Uygulamaları
Trafik sinyal denetimi uygulaması, bulanık mantığın
ilk uygulama alanlarındandır. Bu konuda geliştirilen
model sayısı oldukça fazla olduğundan, bu başlıkta
özellikle literatürde kabul gören çalışmaların bir kısmı
detaylı olarak verilmiştir.
Bu çalışmalarda, genel olarak faz düzeni sabittir.
Değişken faz düzeni ile ilgili nadir çalışmalar da özellikle son yıllarda yapılmıştır. Bulanık mantık tekniğinin trafik sinyalizasyonundaki ilk uygulaması, 1977
yılında Pappis ve Mamdani tarafından yayınlanmıştır.
İki adet tek yönlü yolun kesiştiği bir kavşakta bulanık mantık denetleyici uygulanmıştır. Zaman, gelen
taşıt sayısı ve kuyruk uzunluğu bulanık denetleyici
için girdi parametreleri, yeşil süreyi uzatma miktarı
ise çıktı parametresi olarak alınmıştır. Çalışmada 2
fazlı çalışan bir sistem incelenmiştir. Bulanık mantık
TMH - TÜRKÝYE MÜHENDÝSLÝK HABERLERÝ SAYI 429 - 2004/1
53
TMH
denetleyici, girdi ve çıktı parametrelerine göre hazırlanan ve 25 kuraldan oluşan bir kural tabanına
dayanarak denetimi gerçekleştirmektedir. Kurulan
algoritmanın performansının değerlendirilmesi amacıyla benzetim modelleri oluşturulmuş ve bulanık
mantık denetleyici, trafik uyarmalı denetim sistemi ile
gecikme süreleri bakımından karşılaştırılmıştır.
Karşılaştırmada doğu-batı ve kuzey-güney yönlerinden değişken trafik durumları göz önünde bulundurulmuştur. Bulanık mantık denetleyici, ortalama
gecikme süreleri bakımından trafik uyarmalı sistemden daha iyi sonuçlar vermiştir. Sonuçlar Tablo 1’de
görülmektedir. Bu çalışma daha sonraki bir çok araştırmacı için kaynak olmuştur.
Tablo 1 - Taşıt uyarmalı denetleyici ile bulanık mantık
denetleyicinin taşıtların ortalama gecikme süreleri bakımından karşılaştırılması (Pappis ve Mamdani,1977).
Ortalama Gecikme
(sn/taşıt)
KuzeyDoğuGüney
Batı
Trafiği(t/s) Trafiği(t/s)
Taşıt
Uyarmalı
Denetim
Bulanık
Mantık
Denetim
Gelişme
Miktarı
%
+21
360
360
7.2
5.7
360
720
7.4
6.1
+18
360
1080
7.9
6.6
+17
360
1440
8.4
7.3
+13
360
2520
15.8
13.6
+14
720
720
9.7
7.4
+21
720
1080
10.8
8.8
+19
720
1440
12.7
10.9
+14
720
1800
15.9
14.1
+11
720
2160
21.8
18.5
+15
1080
1080
13.6
12.0
+12
1080
1440
17.9
15.4
+14
1080
1800
25.8
21.6
+16
1440
1440
27.3
22.9
+16
Nakatsuyama ve diğerleri (1984) tarafından, ilk çalışmadan esinlenerek bir bulanık mantık denetleyici
modeli geliştirilmiştir. Nakatsuyama ve diğerleri tarafından geliştirilen bulanık mantık denetleyici, trafik
uyarmalı denetleyici ile değişken trafik koşulları
altında ortalama gecikme süreleri bakımından karşılaştırılmıştır. Sonuç olarak, bulanık mantık denetleyici
ile gecikme sürelerinde ortalama % 20 oranında bir
azalma olduğu öne sürülmüştür.
J. J. Janecek ve M.R.Zargham (1995) tarafından
yapılan çalışmada, 4 kollu ve 4 fazlı ayrık bir kavşak
ele alınmıştır. Bu çalışmada fazların değişimi ile ilgilenilmemiş, sinyal faz sürelerinin uzatılması veya azaltılmasının denetimi amaçlanmıştır. Her fazda gelen
trafik hacmindeki değişim ve kavşağa gelen toplam
trafik miktarındaki değişim oranı parametreleri bulanık
girdi verilerini oluşturmaktadır. Janecek ve Zargham,
geliştirdikleri denetleyiciyi sabit zamanlı sinyalizasyon sistemi ile karşılaştırmış ve ortalama bekleme
süreleri bakımından bulanık algoritmanın üstün oldu-
54
ğunu belirlemiştir.
Kim (1997) tarafından yapılan çalışma da, aynı
şekilde 4 kollu ve 4 fazlı ayrık bir kavşak ele alınmıştır.
Çalışma kapsamında, mevcut faz süresinin artırılmasına veya azaltılmasına karar verme amaçlanmıştır.
Çalışmada faz değişimi ile ilgili bir öneri yoktur,
4 fazlı olarak sabit alınmıştır. Taşıtların ortalama
gecikme süreleri bakımından önerilen algoritmanın
sabit zamanlı sinyalizasyon sistemi ile karşılaştırılması Tablo 2’de görülmektedir:
Tablo 2 - Sabit zamanlı sinyalizasyon sistemi ile J.
Kim tarafından önerilen bulanık mantık algoritmasının
gecikme süreleri bakımından karşılaştırılması (Kim,1997).
Trafik
Senaryosu
Ortalama Gecikme (sn/taşıt) Gelişme
Sabit Zamanlı
Önerilen
Oranı
Sinyalizasyon
Algoritma
%
1.Durum
16.8
17.3
-2.9
2.Durum
30.4
23.8
21.7
3.Durum
37.4
33.9
9.4
4.Durum
36.0
35.1
2.5
Sabit faz düzenini ele alan en kapsamlı çalışma
ise, Helsinki Teknoloji Üniversitesinden Jarkko P.
Niittymaki (1997) tarafından yapılan çalışmadır.
Niittymaki, yaptığı çalışmada taşıt dinamiği ile ilgili
temel konuları ele almış, Finlandiya’daki trafik koşulları için doygun akım araştırması yapmış ve iki fazlı
bir bulanık denetleyici geliştirmiştir. Niittymaki tarafından geliştirilen bulanık mantık denetleyici iki aşamalı
olarak çalışmaktadır. Birinci aşama trafik durumunun değerlendirilmesini, ikinci aşama ise yeşil süre
ve devre sürelerinin düzenlenmesini içermektedir.
Algoritmada her yaklaşım koluna iki adet detektör
yerleştirilmesi uygun görülmüştür.
İki aşamalı bulanık denetim algoritmasının ilk aşamasında son 5 dakikada gelen trafik hacmi ve detektörlerin uyarılma durumlarına göre trafiğin durumu
belirlenmektedir. Trafiğin durumu, doygun üstü,
normal ve düşük olarak 3 gruba ayrılmıştır. İkinci aşamada ise herhangi bir faz devam ederken gelen taşıtlar ile kuyruktaki taşıtlar dikkate alınarak devre süresi
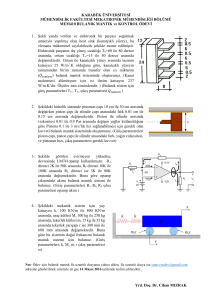
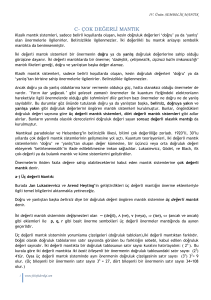
ve faz süreleri belirlenmektedir. Niittymaki tarafından
önerilen algoritmada kullanılan parametrelerin üyelik
fonksiyonları Şekil 1’de verilmiştir:
Tzes, McShane ve Kim (1995) tarafından yapılan
çalışmada hem ayrık (izole), hem de eşgüdümlü
(koordine) kavşaklar için bulanık mantığa dayalı bir
denetleyici önerilmiştir. Tzes, McShane ve Kim tarafından geliştirilen bulanık mantık denetleyicinin girdi
parametreleri; doğu-batı ve kuzey-güney yönlerinden
gelen taşıt sayılarıdır. Benzetim çalışması sonucunda
önerilen bulanık denetim algoritması, sabit zamanlı
sinyalizasyona göre oldukça iyi sonuçlar vermiştir.
Gerson Beauchamp ve diğerleri (1997) tarafından
yapılan çalışmada, trafik denetimi amaçlı bulanık
mantığa dayalı bir faz seçici önerilmiştir. Önerilen sistemde yeşil ışıktaki kuyruk uzunluğu, kırmızı ışıktaki
TMH - TÜRKÝYE MÜHENDÝSLÝK HABERLERÝ SAYI 429 - 2004/1
TMH
resi ele alınmıştır. Çıktı olarak mevcut
faz süresinin değişme miktarı belirlenmiştir.
Jee-Hyong Lee ve diğerleri (1995)
tarafından yapılan çalışmada, eşgüdümlü kavşakların denetimi amacıyla
bir bulanık mantık denetleyici geliştirilmiştir. Faz değişimi ve faz uzunluğu
dinamik olarak kavşağın kendisine ve
bir önceki kavşağın trafik durumlarına göre belirlenmektedir. Faz seçimi
ile ilgili karar, gelecek faz modülünde
Şekil 1 - İki fazlı denetimin üyelik fonksiyonları (Niittymaki,1997).
ve faz süresinin sonlandırılması kararı
ise duruş modülünde verilmektedir.
kuyruk uzunluğu ve devre uzunluğu olmak üzere üç
Gelecek faz modülünde 4 girdi parametresi dikkate
adet girdi kullanılmaktadır. Çıktı ise fazın değişebiliralınmaktadır:
liğidir. Algoritmada çeşitli faz seçenekleri sunulmuştur. Faz seçeneklerine ağırlık katsayıları atanmakta 1. Bir şeritte detektörler arasında bekleyen taşıt
sayısı.
ve akımların ağırlık katsayılarına göre uygun fazın
2.
Kırmızı ışığın başlangıcından beri geçen zaman
seçimine karar verilmektedir. Beauchamp ve diğerleri tarafından önerilen bulanık mantık denetim algo- 3. Bitişik kavşaktan hareket eden taşıtların hesap
ritması, sabit zamanlı sinyalizasyon sistemleri ile
yapılan kavşağa gelişi sırasında geçen zaman.
benzetim programı yazılarak karşılaştırılmıştır. Çeşitli 4. Linkteki taşıt sayısı (bir önceki kavşaktaki taşıt)
trafik hacimleri için ortalama gecikme süresi ve kuy- Lee ve diğerleri tarafından geliştirilen denetim moderuktan ayrılan taşıt sayıları bakımından yapılan karşı- linin geçerliliği benzetim çalışması yapılarak araştırıllaştırmalar sonucunda, ortalama gecikme sürelerinde mıştır. Benzetim çalışmasında 9 kavşak ele alınmıştır.
bulanık mantık denetleyici ile yaklaşık olarak % 25 Tablo 3’te Lee ve diğerleri tarafından geliştirilen
oranında iyileşmeler elde edilmiştir.
modelin karşılaştırma sonuçları verilmiştir.
Stephen Chiu ve Sujeet Chand (1993.a) tarafından Murat (2001), tarafından geliştirilen bulanık mantık
yapılan çalışmada, bir kavşağın, bir önceki kavşağa modeli ise çok fazlı denetlenen ayrık (izole) sinyagöre eşgüdümlü (koordine) sinyalizasyonunun bula- lize kavşakların denetimine yöneliktir. Önceki çalışnık mantık ile düzenlenmesi önerilmiştir. Çalışma malarda geliştirilen modellerin çoğunluğu iki fazlı
kapsamında, faz süresi, faz düzeni ve eşgüdümlü denetlenen kavşaklara yöneliktir. Murat ise, yaptığı
kavşaklar için faz başlangıcının bulanık mantık ile çalışmada çok fazlı denetlenen kavşakları ele almış
düzenlenmesi tasarlanmıştır. Faz süresi, faz dağılımı ve bulanık mantık denetim modelini çok fazlı sistem
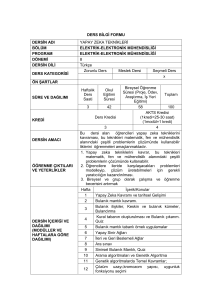
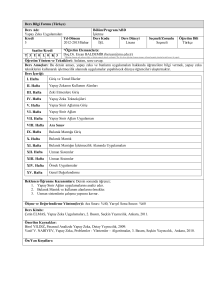
ve faz değişimi bağımsız olarak düzenlenmiş ve için geliştirmiştir. Modelin girdi, çıktı parametreleri ve
toplam 40 bulanık kural kullanılmıştır. Devre süresinin akış şeması Şekil 2’de verilmiştir. Murat, geliştirdiği
düzenlenmesinde, herhangi bir koldaki en yüksek modeli trafik uyarmalı klasik denetim sistemleri ile
doygunluk derecesi ve bu kola karşılık gelen diğer karşılaştırarak geçerliliğini araştırmıştır. Yapılan karbir koldaki en yüksek doygunluk derecesi paramet- şılaştırmalar sonucunda, çok fazlı bulanık mantık
modelinin, klasik trafik uyarmalı modele göre daha iyi
Tablo 3 - Lee ve diğerleri tarafından geliştirilen bulanık
bir denetim sağladığı ve taşıtların ortalama gecikme
mantık denetleyici modelinin ortalama gecikme süreleri
bakımından karşılaştırılması (Lee ve diğerleri,1995).
sürelerinde iyileşmelere neden olduğu anlaşılmıştır.
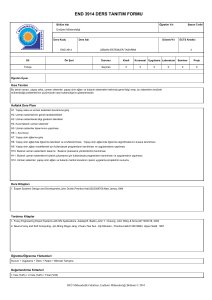
Şekil 3’de yapılan karşılaştırma sonuçları verilmiştir.
Trafik
Ortalama Gecikme (sn/taşıt) Gelişme
Üç fazlı olarak denetlenen kavşak modelinde tüm
Hacmi
Trafik Uyarmalı
Bulanık
Oranı
(taşıt/saat)
Denetim
Denetim
(%)
yaklaşım kollarından aynı trafik hacminin gelmesi
durumunda, 500 taşıt/saat ve daha az trafik hacim1100
54.3
44.2
18.6
leri için trafik uyarmalı denetleyicinin bulanık mantık
1200
55.1
45.6
17.2
denetleyiciye göre ortalama gecikme sürelerinde
1300
54.0
48.6
10.0
%10’luk bir iyileşme sağladığı, fakat 500 taşıt/saat’ten
1400
56.6
52.9
6.5
daha fazla trafik hacimleri için ise bulanık mantık
1500
59.8
58.7
1.8
denetleyicinin daha iyi sonuçlar verdiği ve trafik
1600
64.3
65.5
-1.9
uyarmalı denetleyiciye göre ortalama gecikmelerde
1700
71.3
71.0
0.4
%15.6 oranında iyileşme sağladığı belirlenmiştir. Aynı
1800
79.3
77.8
1.9
şekilde kavşak yaklaşım kollarında farklı trafik hacimlerinin söz konusu olduğu durumda ise bulanık
1900
111.1
88.4
20.4
mantık denetleyicinin daha iyi sonuçlar verdiği
2000
137.2
105.6
23.0
TMH - TÜRKÝYE MÜHENDÝSLÝK HABERLERÝ SAYI 429 - 2004/1
55
TMH
Şekil 2 - Çok fazlı bulanık mantık sinyal denetleyicisinin genel yapısı (Murat, 2001).
ve trafik uyarmalı denetleyiciye göre
ortalama gecikmede %23 oranında
iyileşme sağladığı belirlenmiştir.
Dört fazlı olarak denetlenen kavşak
modeli için yapılan karşılaştırmalar
sonucunda ise, benzer şekilde bulanık mantık denetleyicinin trafik uyarmalı denetleyiciye göre yaklaşım
kollarında aynı trafik hacimleri için
ortalama gecikme sürelerinde %17.6
oranında ve farklı trafik hacimlerinin
söz konusu olduğu durumda ise ortalama %20.25 oranında iyileşme sağladığı sonucu elde edilmiştir.
2.2. Yol Ağlarında Durum Tahmini
2.2.1. Tıkanma ve Kaza Belirleme
Yol ağlarında meydana gelebilecek
tıkanmaların veya trafik kazalarının
bilinmesi veya önceden tahmini trafik
mühendisliği açısından önemlidir.
Gerek bu tıkanmanın yol kullanıcıla-
Şekil 3 - Üç ve dört fazlı denetlenen kavşaklarda yaklaşım kollarındaki trafik hacimlerinin aynı (a) ve farklı (b) olması
durumları için bulanık mantık ve trafik uyarmalı modellerin karşılaştırılması (Murat, 2001).
56
TMH - TÜRKÝYE MÜHENDÝSLÝK HABERLERÝ SAYI 429 - 2004/1
TMH
rına bildirilmesi, gerekse çeşitli önlemler alınarak trafiğin yönetilmesi açısından bu bilgilerin doğru ve
sağlıklı biçimde analizi zorunludur.
Yol ağlarında meydana gelen tıkanma ve kazaların
belirlenmesi amacıyla, Krause ve diğerleri tarafından
bir algoritma geliştirilmiştir (Krause, 1996). Gözlenen
yol kesimindeki taşıt sayısı bir gösterge olarak alınmış ve serbest trafik hacmi ve hız değerleri ile karşılaştırılarak bir model oluşturulmuştur. Aynı zamanda
yol ağındaki kazaların belirlenmesi için geliştirilen
model ile ortalama 3 dakika daha erken olmak üzere
trafik kazaları tahmin edilmiştir. Busch ve diğerleri
(1994) çoklu bir model yaklaşımı geliştirmiş ve klasik
kaza tahmini veya belirleme sistemi ile karşılaştırarak
olumlu sonuçlar elde etmiştir (TRAIL, 1998).
2.2.2. Seyahat süresi tahmini
Seyahat süresi tahmini, sürücü veya yol kullanıcılarına bilgi vermek ve trafik yönetimi amacı ile kullanılmaktadır. Özellikle afet yönetimi gibi durumlarda
çeşitli güzergah alternatiflerinin ortalama seyahat
sürelerini bilmek ve en kısa yolu belirlemek gereklidir. Seyahat süresi tahmini ile ilgili olarak çeşitli yaklaşımlar yapılmıştır (GERDIEN, 1994). Bu yaklaşık
yöntemlerde detektörler ile elde edilen trafik sayımlarından faydalanılmaktadır. Ancak sayımlarda bazen
hatalar olabilmekte veya eksik veriler oluşmakta, bu
da tahmini doğrudan olumsuz etkilemektedir.
Bu olumsuz etkiler, bulanık mantık modelleme de
herhangi bir sorun teşkil etmemektedir. Diğer bir ifadeyle, bulanık mantık modellemede eksik veriler ile
çalışabilme özelliğinden dolayı seyahat süresi tahmininde bulanık mantık yaklaşımı geliştirilmiştir. Choi ve
Lee tarafından geliştirilen algoritmada farklı kaynaklardan elde edilen trafik sayım ve gözlem değerleri
birleştirilmiş ve geçmişteki seyahat süresi değerlerinden de faydalanarak seyahat süresi tahmini
yapılmıştır (Choi ve Lee, 1997). Yapılan modelleme
benzetim (simülasyon) çalışması ile denenmiş ve
olumlu sonuçlar elde edilmiştir.
2.2.3. Kapasite ve Hizmet Düzeyi Tahmini
Kapasite, en basit tanımıyla “herhangi bir yol kesiminde, seçilen bir zaman diliminde gözlenen maksimum trafik birimidir” (May, 1990). Kent içi ve kentler
arası yollar için kapasite değerleri birbirinden farklıdır. Kapasite ve hizmet düzeyi, yolların kullanılabilirlik durumunu ifade etmektedir. Amerika Birleşik
Devletlerinde basılan Yolların Kapasitesi El Kitabı
(Highway Capacity Manual) (TRB, 1985) isimli kitapta
kapasite ile hizmet düzeyi arasındaki ilişkiler için
çeşitli yaklaşımlar yapılmış ve çeşitli tablolar hazırlanarak bu yaklaşımlar ifade edilmiştir.
Klasik yaklaşımlarda kesin sayısal değerlerden yararlanılmaktadır. Örneğin “hız 50km/saat ten fazla ve
yolun geçirebildiği trafik hacmi 2000 taşıt /saat ten
az ise hizmet düzeyi E’dir” biçiminde hizmet düzeyleri ve kapasite değerleri belirlenmektedir. Bunun
yanında gerçekçi düşündüğümüzde, 49 km/saat lik
hız ile 50 km/saat lik hız arasında önemli bir fark
yoktur. Dolayısıyla klasik yaklaşımlarla yapılan tahminler gerçeği yansıtmamaktadır. Bu sayısal değerlerin sınırlarının bulanık olarak belirlenmesi ile gerçeğe
daha yakın modellemeler yapılmıştır.
Chakroborty ve Kikuchi (1990) tarafından yapılan
modellemede ideal kapasite, görüş mesafesi, trafik
hacmi, taşıt aralığı parametreleri girdi; düzeltme faktörü, gerçek kapasite ve hizmet düzeyi ise çıktı olarak
seçilmiştir. Bu parametreler bulanık alt kümelere ayrılmış ve kesin sınırlar yerine üçgen (veya yamuk) üyelik
fonksiyonları ile gösterilen geçişli (bulanık) sınırlara
ayrılarak, girdi ve çıktı parametrelerinin arasındaki
ilişkiler yazılan sözel kurallar yardımıyla modellenmiştir. Modelleme sonucunda, bulanık mantığın klasik
modellemeye göre daha gerçekçi veya sağlıklı sonuç
verdiği anlaşılmıştır.
Ndoh ve Ashford (1994) tarafından yapılan çalışmada geleneksel modellemede kullanılan değerlerin
yerine kullanıcılar tarafından algılanan hizmet düzeyleri modellenmiştir. Bu amaçla, öncelikle kullanıcıların algıladığı hizmet düzeyi kavramı verileri toplanmış
ve bulanık alt kümelere ayrıştırılarak modelleme gerçekleştirilmiştir. Bulanık model, geleneksel değerlendirme ile karşılaştırılmış ve daha duyarlı sonuçlar
elde edilmiştir.
2.3. Sürücü Davranışlarının Modellenmesi
Sürücü davranışları, özellikle mikroskobik simülasyon
modellemesinde kullanılmaktadır. Mikroskobik simülasyon modelleri ile trafik akımlarını detaylı olarak
incelemek, tasarım yapmak mümkündür. Özellikle
taşıt takip aralıklarının belirlenmesi ve modellemesinde sürücü davranışlarının bilinmesi veya kabul
edilmesi gereklidir. Sürücü davranışlarının en doğru
biçimde ve gerçeğe yakın olarak temsil edilmesi
geliştirilecek simülasyon modelini daha kuvvetlendirmektedir. Geliştirilen mikroskobik simülasyon modelleri genellikle taşıt takip modeli ve şerit seçim modelini
dikkate almaktadır.
2.3.1 Taşıt-takip modelleri
En çok bilinen ve kullanılan taşıt takip modeli General
Motor (GM) modelidir. General Motor modelinde
takip eden taşıt, hızını ve takip mesafesini önündeki
araca göre düzenlemektedir. Psiko-fiziksel model ise
diğer bir takip modelidir ve GM modeline göre daha
gerçekçi bir yaklaşım yapmaktadır. Bu modelde,
sürücüler öndeki taşıtın hareketlerinden daha az etkilenmekte ve göreceli hareketleri daha az olmaktadır.
Dolayısıyla öndeki taşıtı belirli ve sınırlı bir mesafeden
takip etme durumu söz konusu olmamakta ve daha
gerçekçi olmaktadır (Leutzbach, 1988).
Bu geleneksel modellerde sürücülerin kendi taşıtları
ve takip ettikleri taşıtın hızı ve mesafeleri ile ilgili
doğru ve kesin bilgilere sahip olması gereklidir. Bu
çoğu zaman mümkün değildir. Ayrıca sürücülerin her
birinin sürüş kabiliyeti deneyimlerine ve trafik kurallarına bağlıdır. Sonuç olarak, taşıt takibinde algılama
TMH - TÜRKÝYE MÜHENDÝSLÝK HABERLERÝ SAYI 429 - 2004/1
57
TMH
ve tepki verme mekanizmaları belirsizdir ve bu yapısı
dolayısı ile bulanık mantık modellemeye uygundur.
Kikuchi ve Chakroborty (1992), bulanık mantığa
dayalı bir taşıt takip modeli geliştirmiştir. Sürücülerin
tepkilerini hazırladıkları bir kural tabanı çerçevesinde
ele almış ve hız, takip mesafesi parametrelerini bulanık olarak modellemişlerdir. Böylece sürücüden sürücüye değişen belirsizlikleri ortadan kaldırarak daha
esnek ve gerçeğe yakın modelleme yapmışlardır.
Rekersbrink (1995) ise bulanık sürüş modeli önermiştir. Bu modelde, taşıtın hızlanma-yavaşlaması ve
şerit değiştirmesi tamamen bulanık kümelerle temsil
edilmiştir. Aşağıda gösterilen parametreler bulanık alt
kümelere ayrılmıştır:
Girdi Parametreleri:
Hız
: çok az, istenen düzeyde, çok fazla
İstenen hız : çok az, istenen düzeyde, çok fazla
Mesafe
: çok yakın, yakın, orta, uzak, çok uzak
Hız farkı
: pozitif, sıfır, negatif
Çıktı:
Hızlanma: çok yavaşla, yavaşla, biraz yavaşla, aynı
kalsın, biraz hızlan, hızlan, çok hızlan
Şerit değiştirme: çok yavaşla, yavaşla, biraz yavaşla,
aynı kalsın, biraz hızlan, hızlan, çok hızlan
Bu parametreler ve aşağıda verilen örnek kurallar
kullanılarak model geliştirilmiştir.
Örnek Kurallar:
EĞER öndeki taşıta mesafe çok yakın İSE yavaşla
EĞER hız çok az VE öndeki taşıta mesafe yakın VE
hız farkı pozitif İSE hızlan
Bu model ile gerçek hayattaki trafik ölçümleri birbirine oldukça yaklaşmıştır.
2.4. Rota (Güzergah) Seçim Davranışının
Modellenmesi
Yol ağlarında rota seçimi konusunda trafik mühendisleri ve ulaşım plancıları tarafından çeşitli çalışmalar yapılmıştır (Bovy and Stern, 1990; Berkum V.
and Van der Mede, 1993). Bu çalışmalarda genellikle
sürücülerin rota tercihindeki davranışları modellenmiştir. Rota seçim modelleri; sürücü davranışındaki
parametrelerin tahmini ve sürücünün tercih davranışının kestirimi gibi amaçlarla kullanılabilir.
Yapılan modellemelerde seçilecek rotaların yararlılık
fonksiyonları (utility functions) belirlenmekte ve buna
göre logit veya probit modelleme yöntemlerinden
faydalanılmaktadır. Yararlılık fonksiyonları; seçilecek
rotanın uzunluğu, seyahat süresi, güvenliği gibi özellikleri içeren doğrusal bir fonksiyondur (Formül 1).
(1)
Uir=Xir+ ir
Burada;
Xir= rota özellikleri
ir= rastgele katsayıdır.
Her bir rota için bu fonksiyon yardımı ile rotanın genel
durumu belirlenmiş olur. Bundan sonra logit veya
58
probit modelleri yardımıyla rotanın seçilme olasılığı
hesaplanarak, iki nokta arasında seyahat edecek
trafik hacmi ilgili rotalara dağıtılır.
Rota seçiminde belirsizlikler mevcuttur. Sürücülerin
alışmış oldukları rotaları seçmesi veya çeşitli rota
alternatifleri hakkında yeterli olmayan ve sübjektif bilgilere sahip olmaları nedeniyle modellemede sorunlar olabilmektedir. Örneğin sürücülerin deneyimi veya
aynı rotanın (güzergahın) farklı günlerde farklı seyahat süresinde hizmet verebilmesi gibi belirsizlikler
nedeniyle problemin yapısında rasgelelikler oluşmaktadır. Problemin rasgele yapısı nedeniyle bazı
belirsizlik yöntemlerinden (utility maximization) faydalanılmaktadır. Ancak bu belirsizlik yöntemlerinde
kesin değerler ile çalışıldığından problemin yapısındaki belirsizliğe tam olarak cevap verememektedir.
Dolayısıyla bulanık mantık modelleme ile bu sorunların aşılabilmesi mümkün olmaktadır.
Bulanık mantık rota seçimi modellemesi ile ilgili
olarak literatürde iki yaklaşım yapılmıştır. Bu yaklaşımlardan birincisi kural tabanlı yaklaşım, ikincisi ise
sıralama veya derecelendirme yaklaşımıdır. Seçilecek
rotaların bulanık maliyetlerinin çıkarılması modellemenin ilk adımı olarak sıralanabilir. Daha sonra
bu maliyetlere göre sıralama ve seçim işlemi
gerçekleştirilmektedir.
Bulanık maliyetlerin belirlenmesi ile ilgili olarak çeşitli
yaklaşımlar geliştirilmiştir (Lotan and Koutsopoulos,
1991; Vythoulkas, 1994). Kural tabanı ile maliyetlerin belirlenmesi bu yaklaşımlardandır. Burada önemli
noktalardan birisi yol ağının çeşitli durumlarda maliyetinin değişebileceği veya belirsizliğidir. Örneğin
Şekil 4’de bir rotanın (güzergahın) normal ve tıkanmış
durumlardaki bulanık maliyet fonksiyonu verilmiştir.
Burada yalnızca seyahat süresi maliyet fonksiyonu
olarak alınmıştır (Henn, 1997).
Her bir rotanın tahmin edilen veya öngörülen bulanık maliyetlerine göre en uygun rota seçimi yapılır.
Burada öncelikle bulanık maliyetler durulaştırılır ve
elde edilen kesin sayısal değerlere göre sıralama
yapılır.
Teodorovic ve Kikuchi (1991) tarafından bir bulanık
mantık rota (güzergah) seçim modeli geliştirilmiştir.
Bu modelde yaklaşık seyahat süreleri bilinen iki alternatif yolun oluşturulan kural tabanı ile karşılaştırılması yapılmaktadır.
Şekil 4 - Bir güzergahın normal ve tıkanmış trafik koşullarındaki bulanık maliyet fonksiyonu
TMH - TÜRKÝYE MÜHENDÝSLÝK HABERLERÝ SAYI 429 - 2004/1
TMH
3. SONUÇLAR VE TARTIŞMA
Bu çalışmada, trafik mühendisliği’nde yeni yöntemlerin uygulamaları ve geliştirilen modeller tanıtılmıştır. Bu kapsamda, yeni hesaplama yöntemlerinden
bulanık mantık tekniğinin genel yapısı, gelişimi ve
uygulama alanları anlatılarak, trafik mühendisliği çerçevesinde yapılan uygulamalara değinilmiştir.
Kent içi trafik sorunlarının artışı nedeniyle, trafik akımlarının daha etkin ve dinamik yönetimi kavramı trafik
mühendislerinin ilgisini çekmektedir. Bu kapsamda,
özellikle kent içi kavşaklarda, trafik sinyal denetimi
konusuna, daha geniş yer verilmiş ve bu konudaki
çalışmalar detaylı anlatılmıştır. Sinyal denetimi ile ilgili
kuramsal çalışmalar, bulanık mantık sinyal denetiminin, özellikle değişken trafik akımlarının bulunduğu
ve yüksek trafik hacmine maruz kalan kavşaklarda
üstün olduğunu kanıtlamıştır. Bu sistemin gerçek
bir kavşakta denenmesi için ilgili çalışmalar yürütülmektedir (Murat, 2003). Yapılacak denemeler
sonucunda, ülkemizde bu denetim sisteminin uygulamaları yaygınlaştırılabilecektir.
Yol ağlarında durum tahmini ve trafiğin yönlendirilmesi konusu, yine trafik yönetimi açısından önem arz
etmekte ve özellikle yurtdışında bu konuda çalışmalar yapılmaktadır. Yol kullanıcılarının bilgilendirilmesi,
trafik tıkanıklığının önlenmesi ve kazalara zamanında
müdahale edilmesi gibi amaçlar doğrultusunda yol
ağları ile ilgili çalışmalar yapılmış ve bulanık mantık
yaklaşımı ile klasik modellemelere göre daha iyi
sonuçlar elde edilmiştir. Bu konularda, ülkemizde de
araştırmaların yapılması ve özellikle büyük kentlerimiz için benzer modeller geliştirilerek yeni ve uygulanabilir sistemlerin kurulması faydalı olabilecektir.
Seyahat süresi tahmini konusu, yol kullanıcıları tarafından en uygun güzergahın veya rotanın seçiminde
etkili olmaktadır. En kısa sürede seyahatini gerçekleştirmek hedefi nedeniyle çeşitli güzergah alternatiflerinin ortalama seyahat süreleri kullanıcılar tarafından
tahmin edilmektedir. Bu tahminlerin, bulanık modellenmesi ile gerçeğe yakın sonuçlar elde edilmiştir.
Ulaşım planlaması çalışmalarında bu yaklaşımı kullanmak ve trafik atamasını bulanık tahminlere dayanarak yapmak ilginç sonuçlar verebilecektir. Bu
konuda yapılan veya yapılacak araştırmaları çeşitli
yazılımlar ile destekleyerek ulaşım planlamacıları ve
trafik mühendisleri için kullanışlı paket programlar
geliştirilebilir.
Kapasite ve hizmet düzeyinin belirlenmesi, özellikle
kavşaklar, yollar gibi ulaşım altyapısının durumunu
belirlemek ve geleceğe yönelik yapılabileceklere karar
vermek açısından önemlidir. Bu amaçla klasik belirleme yöntemlerine alternatif olarak bulanık mantık
modelleme önerilmiş ve başarılı sonuçlar elde edilmiştir. Kapasite ve hizmet düzeyi konusu, yapı itibariyle bulanık mantık modellemeye oldukça uygun
olduğundan (kesin sayısal sınırlar ile modelleme tam
olarak gerçeği yansıtmadığından) yapılan çalışmalar
başarılı olmuştur. Yapılan çalışmaları daha geliştirmek
ve kapasite üzerinde etken parametrelerin tümünü
ele alarak yeni modellemeler yapmak mümkündür.
Ayrıca yine bu modellemenin bilgisayar yazılımı ile
desteklenmesi veya bir yazılıma eklenmesi (entegrasyonu) ile trafik mühendisleri için bir değerlendirme
sistemi geliştirilebilir.
Sürücü davranışlarının gerçeğe en yakın biçimde
modellenmesi, özellikle mikroskobik trafik benzetim
çalışmaları açısından önem taşımaktadır. Geliştirilen
bulanık mantık takip modelleri ile sürücülerin trafikteki davranışları modellenmiş ve General Motor
takip modeli ile karşılaştırılmıştır. Bu modellerin çeşitli
uygulamalarını da gerçekleştirmek ve özellikle kent
içinde serbest ve tıkanık trafik durumlarında otomatik takip yapabilen taşıt teknolojileri geliştirmek mümkündür. Ayrıca bu sayede olası trafik kazaları da
önlenebilecektir.
Bulanık mantığın trafik mühendisliğindeki diğer
önemli uygulamalarından birisi ise rota veya güzergah seçim modellemesidir. Yol kullanıcılarının rota
seçim davranışı genellikle belirsizlikler içermektedir.
Seçilecek rotanın maliyeti (seyahat süresi, mesafesi,
güvenilirliği v.b.) kullanıcılar tarafından yaklaşık olarak
tahmin edilmekte, ancak kesin olarak bilinememekte
ve değişkenlik göstermektedir. Bu belirsizliklerin bulanık mantık ile modellenmesi ile problem daha sağlıklı
olarak tanımlanmış ve başarılı sonuçlara ulaşılmıştır.
Bu modellemenin geliştirilmesi, özellikle ulaşım plancıları ve trafik mühendislerine yardımcı olabilecek ve
bir değerlendirme sistemi oluşturulabilecektir.
Bulanık mantık tekniği’nin trafik mühendisliğindeki
uygulamaları devam etmektedir. Bu çalışma kapsamında değinilen konular dışında, özellikle yol ağlarında trafik denetimi, otoyol ve ekspres yollardaki
trafiğin ve trafik kazalarının önceden tahmini, otopark
denetimi ve yönetimi v.b. gibi konularda da bulanık
mantık tekniği kullanılarak modellemeler yapılması
ve ilginç sonuçlar elde edilmesi mümkündür. Ayrıca,
yukarıda anlatılan ve kuramsal olarak geliştirilen
bazı modellerin uygulanması ile yöntemin verimliliği
gerçek anlamda ölçülebilecektir.
BİLGİ
Bu çalışma, Pamukkale Üniversitesi Bilimsel Araştırma
Projeleri birimince desteklenen 2003MHF08 numaralı araştırma projesi kapsamında hazırlanmıştır.
KAYNAKLAR
Beauchamp-Baez, G., Rodriguez-Morales, E., and Muniz
Marrero, E.,L., (1997). “A Fuzzy Logic Based Phase
Controller for Traffic Control”, Proc. IEEE International
Conference on Fuzzy Systems 1997, pp1533-1539.
Berkum, E. V. and Van der Mede P., (1993). “The impact
of traffic information” PhD. Thesis, Delft University of
Technology.
Diğer referanslara yazarın e-posta adresinden ulaşılabilir.
TMH - TÜRKÝYE MÜHENDÝSLÝK HABERLERÝ SAYI 429 - 2004/1
59