İSTANBUL TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
AKIM MODLU ANALOG-DİJİTAL DÖNÜŞTÜRÜCÜLER
YÜKSEK LİSANS TEZİ
Müh. Mustafa Cem ÖZKILIÇ
504021227
Tezin Enstitüye Verildiği Tarih:
Tezin Savunulduğu Tarih:
6 Mayıs 2005
1 Haziran 2005
Tez Danışmanı : Prof. Dr. Mehmet Sait TÜRKÖZ
Diğer Jüri Üyeleri : Doç. Dr. Ali ZEKİ
Doç. Dr. Shahram MINAEI (D.Ü.)
Haziran 2005
ÖNSÖZ
Bu tezin hazırlanmasında fikirleri ile bana yol gösteren ve moral veren sayın hocam
Prof. Dr. Mehmet Sait Türköz’e teşekkürlerimi sunarım.
Hayatım boyunca beni her zaman destekleyen ve ışığıyla aydınlatan babam
Süleyman Özkılıç, annem Yasemin Özkılıç ve kızkardeşim Sibel Özkılıç’a en derin
teşekkürlerimi sunarım.
Haziran 2005
Mustafa Cem ÖZKILIÇ
ii
İÇİNDEKİLER
KISALTMALAR
TABLO LİSTESİ
ŞEKİL LİSTESİ
ÖZET
SUMMARY
v
vi
vii
ix
x
1. GİRİŞ
1.1. Motivasyon
1
2
2. ANALOG İŞARETTEN SAYISAL İŞARETE GEÇİŞ VE ÇEVRİM
PERFORMANSINI BELİRLEYEN ÖLÇÜTLER
2.1. Örnekleme Teoremi
2.2. Kuantalama ve Kuantalama Gürültüsü
2.3. Analog Dijital Dönüştürücülerin DC ve AC Performans Ölçütler
2.3.1. DC (Statik) Performans Ölçütleri
4
5
8
10
10
2.3.1.1. DNL
10
2.3.1.2. INL
12
2.3.1.3. Offset ve Kazanç Hatası
13
2.3.1.4. Referans
15
2.3.2. AC (Dinamik) Performans Ölçütleri
15
2.3.2.1. İşaret-Gürültü Oranı
15
2.3.2.2. İşaret-Gürültü+Distorsiyon Oranı
16
2.3.2.3. Etkili Bit Sayısı
17
2.3.2.4. Spurlardan Arındırılmış Dinamik Aralık
18
2.3.2.5. Toplam Harmonik Distorsiyon
19
2.3.2.6. İki Tonlu Intermodulasyon Distorsiyonu
2.4. ADD Performansının Belirlenmesi
3. ANALOG DİJİTAL DÖNÜŞTÜRÜCÜ YAPILARI İLE İLGİLİ TEMEL
BİLGİLER
3.1. Analog Dijital Dönüştürücülere Genel Bakış
3.2. Analog Dijital Dönüştürücü Yapıları
20
21
23
23
24
3.2.1. Paralel ADD
24
3.2.2. İki Basamaklı ADD
27
3.2.3. "Pipelined" ADD
30
3.2.4. Başarılı Yaklaşımlar Kütüklü ADD
32
3.2.5. İntegral Almaya Dayalı ADD
34
3.2.6. Algoritmik ADD
38
iii
3.2.7. Diğer ADD Yapıları
41
4. AKIM MODLU PARALEL ADD YAPISI
4.1. Akım Modlu ve Gerilim Modlu Devrelerin Karşılaştırılması
43
43
4.1.1. Gerilim Modlu ADDler
43
4.1.2. Akım Gerilim Kombinasyonuna Dayalı ADDler
44
4.1.3. Akım Modlu ADDler
4.2. Akım Modlu Paralel ADD Yapısı
4.3. Akım Modlu Paralel ADDde Kullanılan Yapı Blokları
44
44
46
4.3.1.Akım Modlu Örnekleme ve Tutma Devreleri
46
4.3.2. Akım Aynaları
49
4.3.2.1. Basit Akım Aynası
50
4.3.2.2. Kaskod Akım Aynası
52
4.3.2.3. Aktif Akım Aynası
54
4.3.2.4. Tasarlanacak ADDde Kullanılacak Akım Aynasının Belirlenmesi
55
4.3.3. Akım Karşılaştırıcılar
55
4.3.3.1. Basit Akım Karşılaştırıcılar
55
4.3.3.2. Resetlemeye ve Tekrar Oluşturmaya Dayalı Akım Karşılaştırıcılar 58
4.3.4. Kodlayıcılar
59
4.3.4.1. Kodlayıcı
59
4.3.4.2. Öncelikli Kodlayıcı
60
5. TASARLANAN AKIM MODLU PARALEL ADD YAPISI
5.1. Akım Modlu Örnekleme ve Tutma Devresi
5.2. Kaskod Akım Aynaları ile Oluşturulmuş Fark Alma Devresi
5.3. Akım Karşılaştırma Devresi
5.4. Öncelikli Kodlayıcı
5.5. Akım Modlu Paralel ADD
5.6. Tasarlanan ADDnin Performansının Belirlenmesi
61
61
64
65
68
69
74
6. SONUÇ
77
KAYNAKLAR
78
EKLER
83
ÖZGEÇMİŞ
85
iv
KISALTMALAR
ADD
BW
DFT
DNL
DSP
ENOB
FFT
FSR
INL
IMD
LSB
MCU
mDAD
MSB
Ö/T
PCM
RAM
RMS
DAD
SAR
SFDR
∑∆
SINAD
SNR
SNDR
THD
TTL
VLSI
:Analog Dijital Dönüştürücü
:Bandgenişliği
:Ayrık Fourier Dönüşümü
:Farksal Lineersizlik
:Sayısal İşaret İşleyici
:Etkili Bit Sayısı
:Hızlı Fourier Dönüşümü
:Tam Ölçü Aralığı
:Integral Lineersizlik
:İntermodulasyon Bozulması
:En Düşük Anlamlı Bit
:Mikrokontrol Ünitesi
:Çarpıcı Dijital Analog Dönüştürücü
:En Yüksek Anlamlı Bit
:Örnekleme ve Tutma
:Darbe Kod Modulasyonu
:Raslantısal Erişimli Hafıza
:Karesel Otalama Değerin Karekökü
: Dijital Analog Dönüştürücü
:Başarılı Yaklaşımlar Kütüğü
:Spurlardan Arındırılmış Dinamik Aralık
:Sigma-Delta
:İşlaret-Gürültü+Bozulma Oranı
:İşaret-Gürültü Oranı
:İşlaret-Gürültü+Bozulma Oranı
:Toplam Harmonik Bozulma
:Tranzistor Tranzistor Lojiği
:Çok Geniş Ölçekli Tümleştirilmiş
v
TABLO LİSTESİ
Sayfa No
Tablo 4.1
Tablo 4.2
Tablo 5.1
: Dörde-ikilik çevirici için doğrluk tablosu........................................... 60
: Dört girişli öncelikli kodlayıcı için doğruluk tablosu.......................... 60
: 8e-3lük MC14532B öncelikli kodlayıcı için doğruluk tablosu........... 69
vi
ŞEKİL LİSTESİ
Sayfa No
Şekil 2.1
Şekil 2.2
Şekil 2.3
Şekil 2.4
Şekil 2.5
Şekil 2.6
Şekil 2.7
Şekil 2.8
Şekil 2.9
Şekil 2.10
Şekil 2.11
Şekil 2.12
Şekil 2.13
Şekil 2.14
Şekil 2.15
Şekil 3.1
Şekil 3.2
Şekil 3.3
Şekil 3.4
Şekil 3.5
Şekil 3.6
Şekil 3.7
Şekil 3.8
Şekil 3.9
Şekil 3.10
Şekil 3.11
Şekil 3.12
Şekil 3.13
Şekil 3.14
Şekil 3.15
: Analog dünya ile sayısal işaret işleyici arasındaki ilişki..................... 4
: (a) x(t) işaretinin dikdörtgen darbeler ile örneklenmesi
(b) örneklenmiş işaretin frekans bölgesindeki durumu........................ 6
: (a) g(t) işaretinin genlik spektrumundaki ifadesi (b) “alias” olayının
görsel olarak ifadesi............................................................................. 7
: (a) g(t) işaretinin Nyquist frekansının üstünde bir değerde
örneklenmesi sonucu oluşan spektral bileşenler (b) işaretin
örneklerinden tekrar oluşturulması için kullanılacak keskin geçişli
olmayan filtrenin genlik cevabı.............................................................7
: N-bitlik işaretin transfer fonksiyonu ve buna karşılık düşen
kuantalama hatası............................................................................... 9
: Bir ADDdeki DNL gösterimi..............................................................11
: DNL hatasına bağlı kayıp kod örneği (a)±1LSB<DNL olduğu için kod
kaybı sözkonusu değil (b) DNL hatası=-1 olması nedeniyle “10” kodu
kayıp.................................................................................................. 11
: Bir ADDdeki monotonluk ifadesi...................................................... 12
: (a) “Son nokta yöntemi” ile INL değerinin belirlenmesi (b) “En iyi
doğru yöntemi” ile INL değerinin belirlenmesi....................................13
: Bipolar sistemlerde offset hatası..................................................... 13
: Unipolar sistemlerde offset hatası................................................... 14
: Offset, kazanç ve tam-ölçü hatası................................................... 14
: Giriş frekansına göre SNDR değişim örneği....................................17
: SFDRnin işaret genliğine (dBC) ve ADDnin tam-ölçü işaret giriş
genliğine (dBFS) bağımlı olarak ifadesi............................................. 19
: İki tonlu IMDnin ikinci ve üçüncü dereceden bileşenleri
20
: Bir çok uygulamada kullanılan ADDlerin hız ve çözünürlük
gereksinimleri.....................................................................................23
: N-bitlik paralel ADD......................................................................... 25
: Basit yapılı N-bitlik iki basamaklı ADD.............................................28
: Sayısal hata düzeltme yöntemi uygulanmış N-bitlik iki basamaklı
ADD................................................................................................... 29
: “Pipelined” ADD blok diyagramı...................................................... 30
: “Pipeline” gecikmesi........................................................................ 32
: N-bitlik SAR ADD blok diyagramı.................................................... 33
: 2-bitlik SAR ADD çevriminin grafiksel gösterilimi.............................33
: Tek eğimli analog sayısal çevirici yapısı..........................................34
: Tek eğimli analog sayısal çeviricinin zamanlama eğrileri................ 35
: Çift eğimli analog sayısal çevirici yapısı.......................................... 36
: Çift eğimli analog sayısal çeviricinin zamanlama eğrileri.................37
: Algoritmik ADD için çevrim algoritması........................................ 38
: Basit akım aynaları kullanılarak oluşturulmuş bir bitlik algoritmik
ADD hücresi.......................................................................................39
: Kaskod akım aynaları kullanılarak oluşturulmuş bir bitlik algoritmik
ADD hücresi.......................................................................................40
vii
Şekil 3.16
Şekil 4.1
Şekil 4.2
Şekil 4.3
Şekil 4.4
Şekil 4.5
Şekil 4.6
Şekil 4.7
Şekil 4.8
Şekil 4.9
Şekil 4.10
Şekil 4.11
Şekil 4.12
Şekil 4.13
Şekil 4.14
Şekil 4.15
Şekil 5.1
Şekil 5.2
Şekil 5.3
Şekil 5.4
Şekil 5.5
Şekil 5.6
Şekil 5.7
Şekil 5.8
Şekil 5.9
Şekil 5.10
Şekil 5.11
Şekil 5.12
Şekil 5.13
Şekil 5.14
Şekil 5.15
Şekil 5.16
Şekil 5.17
Şekil 5.18
: Aktif akım aynaları kullanılarak oluşturulmuş bir bitlik algoritmik
ADD hücresi.......................................................................................40
: N-bitlik akım modlu paralel ADDnin bloklar ile ifadesi.................... 45
: (a) Basit akım aynası temelli örnekleme tutma devresi
(b) Dinamik akım aynası temelli örnekleme tutma devresi........
47
: Regüleli kaskod akım aynası ile oluşturulmuş örnekleme tutma
devresi............................................................................................... 48
: Basit akım aynası............................................................................ 50
: İdeal olmayan Is akım kaynağı ile sürülen basit akım aynasının
küçük işaret eşdeğer devresi............................................................. 51
: Basit akım aynasının zaman bölgesindeki davranışı.......................52
: Basit akım aynasının frekans bölgesindeki davranışı......................52
: Kaskod akım aynası........................................................................ 53
: Kaskod akım aynasının zaman bölgesindeki davranışı...................53
: Kaskod akım aynasının frekans bölgesindeki davranışı..................54
: Aktif akım aynası............................................................................. 54
: CMOS evirici temelli basit akım karşılaştırıcı yapısı........................ 56
: Giriş empedansı azaltılmış CMOS evirici temelli basit akım
karşılaştırıcı yapısı............................................................................. 57
: Pozitif geribeslemeli basit akım karşılaştırıcı................................... 57
: Resetlemeye ve tekrar oluşturmaya dayalı akım karşılaştırıcı
örneği................................................................................................. 58
: Tasarlanan paralel analogdijital dönüştürücüde kullanılacak
örnekleme ve tutma devresi...............................................................62
: Rampa şeklindeki giriş işareti ve çıkışta elde edilen örneklenip
tutulmuş işaret .................................................................................. 63
: Anahtar olarak kullanılan MOS tranzistorun açıldığı zaman
parazitik kapasitelerinden serbest kalan yüklerin tutma anında
neden olduğu hata............................................................................. 63
: Yardımcı devre kullanıldığında elde edilen hata oranı oldukça
düşürülmüş çıkış işareti..................................................................... 64
: Fark alma devresinin blok diyagram ile ifadesi ............................... 64
: Kaskod akım aynaları ile oluştrulmuş fark alma devresi..................65
: Tasarlanan ADDde kullanılan akım karşılaştırıcı devresi................ 67
: CMOS yapılı D-latch devresi........................................................... 67
: Akım karşılaştırıcının tepe değeri 100nA olan kare dalgaya verdiği
cevap................................................................................................. 68
: Öncelikli kodlayıcıda kullanılan yapılar (a) CMOS NAND
(b) CMOS NOR (c) CMOS evirici...................................................... 70
: Akım modlu paralel ADD için1-bitlik hücre örneği........................... 70
: Akım taşıyıcı kullanılarak V-I dönüştürme işlemi............................. 71
: 3-bitlik akım modlu paralel ADD simulasyon sonucu
(a) Giriş işareti (b) 3-bitlik çıkış işaretinin en anlamlı biti (c) 3-bitlik
çıkış işaretinin ikinci en anlamlı biti (d) 3-bitlik çıkış işaretinin en
düşük anlamlı biti............................................................................... 72
: İdeal termometre DAD..................................................................... 73
: Analog sayısal çevrimden sonra yapılan sayısal analog çevrim ile
elde edilen işaret................................................................................73
: Yalnızca kuantalama hatası olan işaretler için elde edilen ENOB
değerleri ............................................................................................ 74
: 319.7 MHz giriş işareti için çıkış işaretinin güç spektrum gösterimi
........................................................................................................... 75
: 62.77 MHz giriş işareti için çıkış işaretinin güç spektrum gösterimi
........................................................................................................... 75
viii
AKIM MODLU ANALOG DİJİTAL DÖNÜŞTÜRÜCÜLER
ÖZET
Bu tez çalışmasında, akım modlu tekniklerin gerilim modlu tekniklere tercih edilme
nedenleri üzerinde durulmuş ve bir akım modlu paralel analog dijital dönüştürücü
tasarımı yapılmıştır.
Daha küçük tranzistor geometrilerine doğru gidilmesi, besleme geriliminin
azaltılmasını gerektirdiğinden, gerilim modlu devrelerin dinamik performansı
sınırlanmaktadır. Bu noktada, daha önce pek dikkate alınmayan, akım modlu
teknikler ihtiyaç duyulan iyileştirilmiş dinamik performans ve yüksek işlem hızı
özellikleri ile ortaya çıkmıştır.
Akım modlu devrelerin, gerilim modlulara göre bu üstünlükleri gözönüne alınarak, en
hızlı analog dijital dönüştürücü yapısı olan akım modlu paralel analog dijital
dönüştürücü tasarımı yapılmıştır. Tasarlanan bu yapının hızını etkileyecek
örnekleme ve tutma devresi ve akım karşılaştırıcı devresi üzerinde durulmuş ve
performansları arttırılmıştır. Kullanılan örnekleme tutma devresinde performansı
sınırlayacak iki etken olan akım transfer oranındaki yetersizlik ve ideal olmayan
anahtarların neden olduğu yük hatası çeşitli yöntemler kullanılarak azaltılmıştır.
Akım karşılaştırıcıda ise, mutlak değer seviyeleri birbirinden çok farklı ve aynı
zamanda zıt işaretli giriş akımlarına, verilecek cevap süresinin hızlandırılması
sırasında karşılaşılan zorlukların aşılmasına çalışılmıştır.
Tasarlanan bu ADD, düşük çözünürlüklü olmasına rağmen, yüksek çevrim hızına
sahip olduğu için tek başına yüksek çözünürlüklü paralel ADD olarak kullanılmak
yerine iki basamaklı veya “pipelined” yapılı ADDlerde alt ADD olarak kullanılmaya
uygundur.
ix
CURRENT MODE ANALOG-DIGITAL CONVERTERS
SUMMARY
In this thesis, the reason why current mode techniques are prefered instead of
voltage mode techniques is stated and a current mode flash ADC is designed.
The reduction of the supply voltage necessiated by the move to the smaller
tranzistor geometries causes the dynamic performance of the voltage mode circuits
to be limited. At this point current mode techniques, which were not taken into
consideration very-well before, emerges with their improved dynamic performance
and high process speed ability .
By considering the superiority of the current mode circuits to their voltage mode
counterparts, a current mode flash analog to digital converter, which is the fastest
architecture to convert analog signal to digital signal, is designed. The performance
of the sample and hold circuit and the current comparator which are the core
elements affecting the speed of conversion is improved. The two factors limiting the
performance of the sample and hold circuit , poor current transfer ratio and the
charge error caused by the non-ideal switches are reduced by using various
methods. The diffuculties to speed up the response time of the current comparator
to the current inputs having distinct absolute values and different signs at the same
time is tried to overcome.
Although the designed ADC has low resolution, because of having high conversion
rate, it is better to apply this converter as a sub ADC to a two step or a pipelined
ADC instead of using as a stand-alone high resolution flash ADC.
x
1. GİRİŞ
Bilinen, kayıtlara geçmiş ikilik sisteme dayanan ilk DAD 18. yy’da Osmanlı
İmparatorluğu’nun su sağlayıcılarında çıkan sorunları çözmek üzere geliştirilen su
miktarını ölçme sistemleriydi. Sistem, 8 bitlik DAD gibi çalışacak şekilde yan yana 8
adet ikilik sistem ağırlıklı kanalın el ile yönlendirilmesiyle çalıştırılmaktaydı (Kester,
2004).
Elektronik
alanına
bakıldığında,
ilk
veri
çeviriciler
haberleşme
alanında
geliştirilmiştir. Telegraf ve telefonun icadıyla elektronik haberleşme alanındaki
çalışmalar başlamış ve PCM (1937) sistemlerinin oluşturulmasıyla veri çeviriciler
devreye girmiştir. Tasarlanan bu çeviricilerde aktif eleman olarak vakum tüpleri
kullanılmıştır.
1940 ve 1950lerde geliştirilen sayısal bilgisayarlar nedeniyle, sayısal işaret işleme
önem kazanmış, dolayısıyla üstün performanslı ADD ve DADlere duyulan ihtiyaç
artmıştır.
1947’de germanyum tranzistorun icadından sonra elektronik sistem tasarımında
yeni bir çığır açılmıştır. 1954’te silikon tranzistor geliştirilmiş, 1959’da tümleştirilmiş
devre teknolojisi uygulanmaya başlanmış ve tümleştirilmiş devre yapısının
karalılığını arttırıp, bozucu etkilere duyarlılığını azaltan “planar” teknoloji ile
desteklenmiştir. Beklenildiği üzere, katı hâl elektroniğindeki bu gelişmeler ADD ve
DADleri doğrudan etkilemiş ve küçük çip alanı kaplayan, çözünürlüğü ve çevrim hızı
yüksek veri çevirici devreleri tasarlanmaya başlanmıştır.
1960’larda NPN ve PNP tranzistorlara dayalı bipolar teknoloji ile “monolithic”
işlemsel kuvvetlendiriciler tasarlanmıştır. Bu lineer elemanlara ek olarak TTL lojik
ailesine üye sayısal devreler kullanılarak 1970’lerdeki veri çeviriciler tasarlanmıştır.
1970’lerden 1990’lara kadar geçen süre içerisinde, bipolar teknoloji ve ince film
direnç teknolojisi ,kalibrasyonu mümkün olan lineer devreler ve veri çeviriciler
oluşturulmasında kullanılan direnç teknolojisi, kullanılarak performansları artan
tümleştirilmiş veri çeviriciler tasarlanmıştır.
1980’lere kadar PNP tranzistorların yüksek frekanslardaki davranışının kötü olması
nedeniyle lineer devrelerin, özellikle işlemsel kuvvetlendiricilerin, performansı kötü
1
yönde etkilenmiştir. 1980’lerde “p-epi” tamamlayıcı bipolar teknoloji kullanılarak bu
engel aşılmıştır.
1960’lı yıllarda ortaya çıkan CMOS teknoloji, TTL devrelerin yerini ,küçük alan
kaplaması, düşük güç harcaması, geniş hafıza olanakları nedeniyle, CMOS
devrelerin almasını sağlamış ve karmaşık VLSI sayısal devrelerin oluşturulmasında
vazgeçilmez yöntem olmuştur.
CMOS teknoloji ile verimli devreler yapılmasına karşılık, bipolar teknoloji kullanılarak
yapılan kuvvetlendirici ve gerilim referansı devreleri daha iyi performans
sunmaktadır. Bu durum CMOS teknoloji ile bipolar teknolojinin birleştirilerek daha
karmaşık buna karşılık daha verimli BiCMOS teknolojinin geliştirilmesine neden
olmuştur.
Modern mikronaltı CMOS teknolojisinin hızlı, düşük güç harcamalı ve ucuz
yapısından dolayı, lojik ve hafıza devrelerinde kullanılan teknikler kullanılarak,
eşlenmiş kapasitelerin, dirençlerin, kaçak akımları ve iletim dirençleri çok düşük
anahtarların oluşturulması olanaklı hale gelmiştir. CMOS teknoloji, bu baskın
özellikleri nedeniyle ADD ve DAD yapılarının birçoğu oluşturulurken, modern
çeviricilerde daha çok sayısal fonksiyonlar eklendiği gözönüne de alındığında,
baskın teknoloji olmuştur.
Buna karşılık mikronaltı CMOS teknolojisi, kullanılan
kanal uzunluğu teknolojisine bağlı olarak tranzistor belverme geriliminin düşmesi
nedeniyle, besleme gerilimlerinin dolayısıyla devrelerin çıkış işaret salınım aralığının
azalmasına neden olmuştur.
Bipolar yapıların kullanıldığı kuvvetlendirici ve gerilim referansı devreleri CMOS
yapılarla oluşturulanlara göre daha iyi performans sunmasından dolayı çok yüksek
performanslı giriş yapıları gerektiren devrelerde BiCMOS yapıların kullanılabileceği
unutulmamalıdır (Kester, 2004).
1.1. Motivasyon
Bu tezde, akım modlu analog-sayısal çeviricilerin gerilim modlu analog sayısal
çeviricilere göre üstünlükleri üzerinde durulmuştur ve bu noktadan hareketle 3 bitlik
akım modlu, 0,5µ mikronaltı CMOS teknolojisine dayalı, paralel ADD devresi
tasarlanmıştır.
Tezin 2. ve 3. bölümlerinde analog-sayısal çevirici performans ölçütleri ve türleri
üzerinde durulmuştur.
2
4. bölümde akım modlu paralel ADD yapısında kullanılabilecek temel yapılar
tanıtılmıştır. 5. bölümde ise bu yapılar, yüksek performanslı ADD tasarımı için
geliştirilmiştir.
6. bölümde elde edilen sonuçlar yorumlanmıştır.
3
2. ANALOG İŞARETTEN SAYISAL İŞARETE GEÇİŞ VE ÇEVRİM
PERFORMANSINI BELİRLEYEN ÖLÇÜTLER
Analog devreler ile karşılaştırıldığında sayısal devreler, gürültüye karşı daha az
duyarlı ve işlem varyasyonlarına karşı daha dayanıklı, tasarım ve testleri daha basit,
programlanmaya daha elverişili yapılardır. Sayısal devre ve işlemcileri hayatın
vazgeçilmezi olmasının en önemli nedeni tümleştirilmiş devre teknolojilerindeki
gelişmeler sonucunda performansların yükselmesidir (Razavi, 1995).
Devreleri analog ve sayısal devreler olarak ayırmadan önce işledikleri işaretleri
incelemek gerekir. İşaretler karakteristik frekanslarına ve genliklerine göre iki gruba
ayrılırlar:
•
Analog İşaretler: Sürekli zaman ve sürekli genlikli işaretleridir. Temel olarak,
genlikleri ve bandgenişlikleri sınırlı değildir.
•
Sayısal İşaretler: Bandgenişlikleri (örneklemeden dolayı) ve genlikleri
(kuantalamadan dolayı) sınırlı işaretlerdir.
Doğada, algılanabilir tüm işaretler analog yapılıdır. Bu analog işaretlerin işlenmesi
sırasında zorluklarla karşılaşılacağı için DSP veya MCU tarafından işlenebilecek
sayısal verilere dönüştürülmesi gerekir. Analog Dijital Dönüştürücüler ve Dijital
Analog Dönüştürücüler, analog dünya ile sayısal dünya arasındaki köprüyü
oluştururlar (Şekil 2.1).
Şekil 2.1: Analog dünya ile sayısal işaret işleyici arasındaki ilişki
4
Analog işaretlere göre yaklaşımlar olarak ifade edilen sayısal işaretlere dönüştürme
sırasında, sınırlamalardan dolayı bazı hatalar oluşur. Bu hatalar, kullanılan ADDnin
performansının ve çevrimi başarıyla yapma mikatrının ölçütüdür.
2.1. Örnekleme Teoremi
Analog dijital çevrim sırasında, tüm çevrim girişlerine ulaşan giriş işaretinin değerinin
belirli zaman aralığında sabit değerli olması gerekir. Bu nedenle sürekli zaman
analog işaretler, belirli zaman aralıklarında, ts=1/fs, orijinal işareti temsil edebilecek
doğrulukta olacak şekilde örneklenirler. Örnekler ne kadar sıklık ile alınırsa, işaretin
sayısal ifadesi o kadar düzgün bir biçimde girişi temsil edebilir. Örnekleme sıklığı
düşük tutulursa, işaretin belirli bir kısmı alınamayacağı için bilgi kaybı sözkonusu
olabilir.
Bilgi kaybı olmadan, örneklenmiş işaretten orijinal işaretin elde edilebilmesi için
gerekli örnekleme sıklığının belirlenmesinde Shannon Örnekleme Teoremi’nden
yaralanılır:
Shannon Örnekleme Teoremi: fmax frekansının ötesinde bileşeni bulunmayan
sürekli
zaman
işareti
x(t),
x[n]=x(nTs)
örneklerinden
tam
olarak
tekrar
oluşturulabilmesi için örnekleme sıkılığı olan fs=1/T için şu şart sözkonusu
olmaktadır:
fs > 2fmax
(2.1)
Örnekleme teoremi iki nokta üzerinde durmaktadır:
•
Bir işaretin, örnekleri kullanılarak tekrar oluşturulabileceğinden,
•
Sürekli zaman işareti x(t)’ nin frekansına bağımlı minimum örnekleme
oranından (frekansından)
Minimum
örnekleme
oranı
(frekansı),
Nyquist
Oranı
(frekansı)
olarak
isimlendirilmektedir (McClellan ve diğ, 1998).
Şekil 2.2(a)’ da g(t) darbeleri ile örneklenmiş işaret görülmektedir. Elde edilen işaret
şu şekilde ifade edilir:
s(t) =
∑
n
x(nT)g(t − nT)
(2.2)
Bu işarete Fourier dönüşümü uygulandığında ise şu sonuç elde edilir Şekil 2.2(b):
5
S(f) =
1
G(f)
T
∑
k
X(f +
k
)
T
(2.3)
Şekil 2.2(b)’de örneklenmiş işaretin spektral bileşenleri görülmektedir. X(f) işareti
band sınırlı işaret olduğu için, S(f)’de fs=1/T peryodu ile band sınırlı olacaktır.
X(f+k/T) bileşenleri üst üste çakışmaz ise, X(f) temel bandının, dolayısıyla x(t)
işaretinin, bir filtre yardımıyla tekrar oluşturulması mümkün olabilmektedir
(Rodriguez-Vazquez, 2003).
Şekil 2.2: (a) x(t) işaretinin dikdörtgen darbeler ile örneklenmesi (b) örneklenmiş
işaretin frekans bölgesindeki durumu
Shannon Teoremi gözönüne alındığında, örnekleme peryodu içinde ilgili giriş
işaretine ait en az iki adet örnek bulunmaz ise orijinal işaretin oluşturulması mümkün
olmayabilir. Örneğin: fo frekanslı bir işaret örneklendiğinde elde edilen ardışık işaret:
x[n] = Acos(2π fo nTs + φ)
6
(2.4)
Şekil 2.3: (a) g(t) işaretinin genlik spektrumundaki ifadesi (b) “alias” olayının görsel
olarak ifadesi
Şekil 2.4: (a) g(t) işaretinin Nyquist frekansının üstünde bir değerde örneklenmesi
sonucu oluşan spektral bileşenler (b) işaretin örneklerinden tekrar oluşturulması için
kullanılacak keskin geçişli olmayan filternin genlik cevabı
şeklinde ifade edilir. fo+lfs (l=tamsayı) frekanslı işaret örneklendiği durumda elde
edilecek ardışık işaret ise:
7
y[n] = Acos(2 π(fo + lfs)nTs + φ)
(2.5)
olacaktır. y[n] işareti peryodik olduğu için:
x[n]=y[n]
(2.6)
elde edilir. fo+lfs gibi frekanslara, fs örnekleme frekansı gözönüne alındığında fo
frekansının “alias”ı denir ve şu şekilde açıklanır: İşaret spektrumunda, yüksek
frekanslı bir bileşenin düşük frekanslı bileşenin yerini almasıdır (Haykin, 1994). Şekil
2.3(a) ve (b)’de g(t) işaretinin spektrum ifadesi ve “alias” olayının ifadesi
görülmektedir. “Aliasing” etkilerine karşı alınabilecek önlemler:
•
İşaret bilgisi ile ilgisi olmayan işaretler “pre-alias” filtreler kullanılarak
bastırılabilir.
•
Filtrelenmiş işaretler, Nyquist frekansının biraz daha üzerinde örneklenebilir.
Aynı durum negatif frekanslı işaretler içinde geçerlidir. Örneğin -fo+lfs (l=tamsayı)
frekanslı işaret örneklendiği durumda elde edilecek ardışık işaret
z[n] = Acos(2 π(-fo + lfs)nTs − φ)
(2.7)
olacaktır. Bu durumda da:
x[n]=z[n]
(2.8)
olur. Bu olay “folding” etkisi olarak adlandırılır.
İşaretler, Nyquist frekansından düşük frekanslarda örneklenmesine “undersampling”
denir. Undersampling uygulamalarında örneklenen işaret bir daha oluşturulamaz.
Nyquist frekansının üstünde yapılan örneklemeye ise “oversampling” denir (Şekil
2.4(b)). “Oversampling” uygulamalarında işaret kolayca, keskin filtreye gerek
duymadan (Şekil 2.4(c)), süzülüp elde edilir .
2.1. Kuantalama ve Kuantalama Gürültüsü
N bitlik bir ADD yalnızca 2N olası çıkış verebilmektedir. Bu nedenle, sürekli genlikli
analog işaretler, ADDnin çözünürlüğüne bağlı olarak belirlenmiş, değerlerine en
yakın 2N seviyeden birisine (kuantalama seviyesi) karşı düşürülürler.
Herhangi bir kuantalama seviyesi ile bir sonraki kuantalama seviyesi arasındaki fark
kuantalama basamağı olarak adlandırılır. Her kuantalama seviyesi arasındaki fark
8
eşit ise bu kuantalama düzgün dağılımlı olarak yapılmıştır denir. Kuantalama
basamakları arasındaki fark ise şu şekilde hesaplanır:
∆ = LSB =
A
2N
(2.9)
Bu denklemde; A, tam ölçü giriş işaretini temsil etmektedir. Kuantalama basmağı bir
LSB değerine eşittir.
İdeal N-bitlik analog dijital dönüştürücünün oluşturacağı hatalar, örnekleme ve
kuantalama sırasında meydana gelir. İdeal bir çevircinin, analog veriyi sayısal veriye
dönüştürürken oluşturacağı max hata ±1/2LSB sınırı içinde olacaktır. Şekil 2.5’ de
N-bitlik ideal ADDnin transfer fonksiyonu görülmektedir.
Şekil 2.5: N-bitlik işaretin transfer fonksiyonu ve buna karşılık düşen kuantalama
hatası
Oluşan kuantalama hatasının, єq ±1/2∆ aralığında raslantısal olarak, düzgün bir
şekilde dağıldığı varsayımıyla bir tür gürültü olarak (kuantalama gürültüsü) ele
alınabilir. Bu gürültünün gücü, giriş işareti ile kuantalama hatasının ilintisiz olduğu
varsayımıyla şu şekilde hesaplanır:
Pkuantalama _gürültüsü
1
=
T
9
∆
2
∫
−∆
2
2
εq dεq =
∆2
12
(2.10)
Bazı durumlarda saat darbesi ile giriş işareti harmonik olarak ilişkili olduğunda
kuantalama hatası ile giriş işareti ilintili olmakta ve enerji, işaretin harmonikleri
üzerinde yoğunlaşmaktadır (Kester, 2004).
2.3. Analog Dijital Dönüştürücülerin DC ve AC Performans Ölçütleri
ADD performans ölçütleri genel olarak iki grupta incelenir: DC ve AC performans
ölçütleri. Bazı uygulamalarda, ADDler göreli olarak statik veya DC benzeri değerleri
(sıcaklık
algılaması)
ya
da
dinamik
değerlerin
(ses
sinyalinin
işlenmesi)
ölçülmesinde kullanılırlar. Bir sistem için seçilecek ADDler yalnızca çözünürlükleri
bakımından değil kullanılacakları görev için gerekli AC veya DC performansları
gözönüne alınarak değerlendirilmelidir. Aksi takdirde yüksek çözünürlüklü bir ADD
beklenenden çok daha kötü performans sergileyebilmektedir.
2.3.1. DC (Statik) Performans Ölçütleri
Bazı uygulamalarda (sıcaklık ve basınç sensörleri) işaretler göreli olarak statik
kalırlar.
Bu
uygulamalarda,
ölçülen
gerilim
veya
akım
fiziksel
verilere
dayanmaktadır. Bu durum gözönüne alındığında, ölçülen gerilim veya akımın,
fiziksel veriyi tam olarak yansıtması gerekir. Bu tür mutlak doğruluğu anlatan
performans ölçütleri offset hatası, genlik hatası, DNL, INL ve referans hatasıdır.
2.3.1.1. DNL
İdealde, ADDnin transfer fonksiyonu gözönüne alındığında herhangi bir sayısal
koddan bir sonrakine geçmek için analog işaret değerinde 1 LSB değerinde artış
olması gerekmektedir. DNL ise bu geçişler sırasında ideal değer olan 1 LSBden
sapmaların ölçüsüdür.
DNL değerinin belirlenmesi için kullanılan formül aşağıda gösterilmiştir:
DNL = Agiriş (Qm+1) – Agiriş (Qm) – 1LSB
(2.11)
(Qm+1) ve (Qm) iki komşu kuantalama seviyesini temsil etmektedir. Agiriş(Qm+1) ve
Agiriş(Qm) değerleri ise sırasıyla bu kuantalama seviyelerine karşılık gelen analog
giriş işaretini temsil etmektedir. Görüleceği gibi iki kuantalama değeri arasındaki fark
1LSB olursa, DNL sıfır değerine eşit olmaktadır. Bu fark, sıfırdan büyük olursa DNL
pozitif, sıfırdan küçük olursa DNL negatif olur.
Bir ADDnin performans ölçütlerinden birsi de, çevrim sırasında kod kaybının oluşup
oluşmamasıdır. Kod kaybının olmaması şu şekilde ifade edilir: giriş işareti giriş
10
aralığında tarandığı zaman, buna karşı gelebilecek tüm kod kombinasyonlarının
çıkışta elde edilebilmesidir. DNL <±1 LSB sınırları içinde tutulduğu sürece ilgili
çeviricinin kayıp kod olayına izin vermeyeceği garanti edilebilir. Bir ADDnin test
koşullarında elde edilen sınırlar genelde veri dokümanlarından elde edilen
sınırlardan daha sıkı olduğu için, kayıp kod olmaması garanti edilememektedir.
Şekil 2.6: Bir ADDdeki DNL gösterimi
Şekil 2.7: DNL hatasına bağlı kayıp kod örneği (a) ±1LSB<DNL olduğu için kod
kaybı sözkonusu değil (b) DNL hatası=-1 olması nedeniyle “10” kodu kayıp
Şekil 2.7(a)’da
görüldüğü üzere, DNL<±1 sınırları içinde kaldığı için kod kaybı
sözkonusu değildir.
Şekil 2.7(b)’de ise DNL=-1LSB olduğu için buna karşı gelen
“10” kodu, çevirici tarafından çıkışa verilmemektedir.
Bir ADDnin çıkışında elde edilen sayısal kod, girişteki analog işaret arttığı sürece
artıyor ya da sabit kalıyorsa kullanılan ADD monotonik olarak sınıflandırılabilir.
11
Monotonluk, DNL değeri 1LSBye eşit veya daha düşük olduğu durumlarda garanti
edilebilir. Bir monotonik sistemde çıkıştaki 1LSBlik artışa karşılık, analog girişte 0 ile
2LSB arasında değişim olur. Şekil 2.8’de bir ADDdeki monotonluk olayının görsel
ifadesi bulunmaktadır.
Pratikte, küçük değerli analog işaret girişlerinde, gürültü
ADD çıkışının iki kod
arasındaki geçişinde osilasyon yapmasına neden olduğu için, monotonluk ölçümü
histogram tekniği kullanılarak yapılır.
Şekil 2.8: Bir ADDdeki monotonluk ifadesi
DNL, kuantalama etkisine, gürültü ve “spurios” bileşenler eklendiğinde, ADD
performansı SNR (işaret gürültü oranı) ve SFDR (“spurous” dan arındırılmış dinamik
aralık) bakımından sınırlanmaktadır.
2.1.1.1. INL
Integral Lineersizlik (INL), bir çeviricinin transfer fonksiyonunun çizilmiş olan bir
doğrudan sapmasının ölçüsüdür ve genelde LSB veya tam ölçü aralığı yüzdesi
(FSR) cinsinden ifade edilir. Bu doğrunun seçiminde baş vurulan yöntemlerden en
sık kullanılan ikisi aşağıda belirtilmiştir:
•
Son nokta yönteminde, orijinden başlayarak tam genlik noktasında son
bulacak bir doğru çizilerek sapma miktarı hesaplanır. Bu yöntem, kullanıcının
çeviriciyi kolayca kalibre etmesini sağlar. Bunun yanısıra, lineerliği
12
göstermenin en yalın yöntemlerinden biridir çünkü toplam hata miktarı
ölçülürken ideal transfer fonksiyonundan sapmaya göre hesaplanır.
•
Standart eğri yerleştirme yöntemi kullanılarak bir doğru, transfer karakteristiği
üzerine çizilir ve sapmalar bu doğruya göre ölçülür. Bu yöntem kazanç hatası
ve offset hatası hakkında da fikir verir. Ayrıca bu yöntem ac uygulamalarında
distorsiyon ile ilgili daha iyi kestirimde bulunmayı sağlar.
Şekil 2.9 (a) ve (b) karşılaştırıldığında, en iyi doğru yönteminde hesaplanan INL
hatası, son nokta INL hatasına göre %50 daha düşük çıkar.
Şekil 2.9: (a) “Son nokta yöntemi” ile INL değerinin belirlenmesi (b) “En iyi doğru
yöntemi” ile INL değerinin belirlenmesi
2.1.1.2. Offset ve Kazanç Hatası
13
Şekil 2.10: Bipolar sistemlerde offset hatası
Kuvvetlendirici ve karşılaştırıcılarda kullanılan elemanların uyumluluğunun sınırlı
olmasından dolayı offset gerilimi ve offset akımı oluşur. Bu offset değeri, çevircinin
girişine sıfır değerli işaret uygulandığı halde, çıkışta sıfırdan farklı bir değer elde
edilmesine neden olur. Bu bilgiler ışığında bir ADDdeki offset şu şekilde
tanımlanabilir: elde edilen transfer fonksiyonunun ilk geçiş noktasının, ideal
noktadan olan sapma miktarıdır.
Şekil 2.11: Unipolar sistemlerde offset hatası
14
Şekil 2.12: Offset, kazanç ve tam-ölçü hatası
Bipolar sistemlerde, offset hatası öteleme ile veya iteratif (offset oluşturma, kazanç
ayarlaması ve öteleme) tekniklerle giderilebilir. Unipolar sistemlerde ise durum biraz
farklıdır. Eğer offset pozitif değereli ise, bipolar sistemlerdeki gibi düzeltilebilir. Eğer
offset negatif ise, çevirici çıkışında lojik “0” değerleri belireceği için giriş değeri
çıkışta bir geçiş noktası oluşturana kadar yavaş yavaş arttırılır.
Kazanç hatası, offset hatası giderildikten sonra, tam ölçü işaret girişi dikkate
alındığında, çıkışın ideal transfer fonksiyonundan sapma miktarıdır. Tam ölçü işaret
hatası ise transfer fonksiyonunun son geçiş noktasında ölçülür ve ideal ADD transfer
fonksiyonuyla karşılaştırılır. Tam ölçü işaret hatası, offset hatası ve kazanç hatasının
toplamı olarak da ifade edilebilir.
Kazanç hatası iki şekilde giderilebilir: referans değerini, belirli bir değerde tam işaret
çıkışı verecek şekilde bükerek ya da ADD transfer fonksiyonunun eğimini software
ile oluşturulacak lineer doğrulama eğrisi ile değiştirerek.
Offset hatası ve kazanç hatası, bir ADDnin dinamik performansının azalmasına
neden olur.
2.1.1.3. Referans
Bir
ADDnin
referans
işareti,
karşılaşılabilecek
en
büyük
potansiyel
hata
kaynaklarından biridir. Bu hata, sıcaklıktan, kaynak gürültüsünden veya yük
regülasyonundan kaynaklanır.
2.1.2. AC (Dinamik) Performans Ölçütleri
Bazı ADDler, DC giriş işaretlerinde (veya yavaş değişen giriş işaretlerinde) iyi
sonuçlar verebilir; ama bu durum hızlı değişen giriş işaretlerinde iyi sonuç vereceği
anlamı taşımamaktadır. Bir ADDnin AC performansının iyi olup olmadığını
anlayabilmek için SNR, SNDR, ENOB, THD, SFDR ve IMD değerlerine bakılmalıdır.
Dinamik performans ölçütleri frekans bölgesinde Hızlı Fourier Dönüşümü (FFT)
uygulanarak incelenir.
2.1.2.1. İşaret-Gürültü Oranı
İşaret-gürültü oranı, giriş işaret gücünün rms (karesel ortalama değerinin karakökü)
değerinin, gürültü gücünün rms (harmonik distorsiyon dahil edilmemektedir)
değerine oranıdır.
15
SNR ölçütü kullanılarak, ölçülen işarete karşı beklenen gürültü gücünün
karşılaştırılması yapılabilir. İşaret-gürültü oranı hesaplanmasında elde edilen gürültü
ölçüsü harmonik distorsiyon bileşenlerini kapsamamasına karşılık kuantlama hatası
ve diğer gürültü kaynaklarını –ısıl gürültü vs.- kapsamaktadır. Çözünürlüğü
gözönüne alınan bir ADDde, teorik olarak en iyi SNR değeri hesaplanırken
performansı sınırlayan tek etken kuantalama hatasıdır. Bir ADDnin teorik SNR
değeri, n değeri çözünürlük olarak ele alınırsa, şu şekilde hesaplanır:
SNR(dB)=6.02n+1.76
(2.12)
Kuantalama hatasının rms değeri hesaplaması Nyquist bandgenişliğinin tamamı
üzerinde (DC’den fs/2’ye kadar) yapılmaktadır. Çoğu uygulamada ise işaret
bandgenişliği (BW) çok daha küçük olur. Bu band genişliğinin dışında kalan bölge
uygun filtre kullanılarak temizlenirse, yukarıdaki denklemde bir düzeltme (işlem
kazancı “process gain”), yapmak gerekir. Bir işareti band genişliğinin iki katından
daha yüksek bir değerde örneklemeye “oversampling” denir ve bu olay Nyquist band
genişiğine düşen gürültünün etkisini azaltır. Genliği, seçilen bir ADDnin tam işaret
giriş genliğine eşit sinüs işareti için teorik maksimum SNR aşağıdaki formül ile
hesaplanır.
SNRdB = 6.02n + 1.76 + 10log10
Kuantalama
hatasını
azaltmak,
işaret-gürültü
fs
2.BW
oranını
(2.13)
arttırmak
için
ADD
çözünürlüğünün arttırılması gerekmektedir. Gerçekte, bir ADDnin SNR değerini
belirlemede harmonik, intermodulasyon ve spurious distorsiyon etkilidir. Sonuç
olarak gürültü kaynakları arttıkça SNR değeri azalır. Bir data çeviricinin, gürültü
tabanını belirleyen çözünürlüğü ve kuantalama seviyesidir. Bu bilgiler ışığında bir
sinüzoidal giriş işareti için, asıl SNR değerinin hesaplanması şu şekildedir:
⎛
⎞
Aisaret(rms)
⎟
SNRdB = 20log10 ⎜
⎜ Atoplam_gürültü(rms) ⎟
⎝
⎠
(2.14)
Aisaret(rms): analog giriş işaretinin rms değeri
Atoplam_gürültü(rms):
dinamik
performansı
sınırlayan
tüm
gürültü
oluşturduğu gürültünün rms değeri (harmonik distorsiyon hariç).
2.1.2.2. İşaret-Gürültü+Distorsiyon Oranı
16
kaynaklarının
Sinüzodal giriş işaretleri için, SNDR (veya SINAD), giriş işaretinin rms değerinin,
gürültü ve distorsiyon, THDnin ilk N harmoniği (genelde 2.’den 5.’ye kadar),
toplamının rms değerine oranıdır. SNDR, bir ADDnin dinamik aralığının kalitesini
belirler ve
⎛ Aisaret(rms)
SNDR dB = 20log 10 ⎜
⎜ Agürültü +HD(rms)
⎝
⎞
⎟
⎟
⎠
(2.15)
şeklinde ifade edilir. Bu denklemde; Aisaret(rms), çıkış işaret seviyesinin rms değerini,
Agürültü+HD(rms) ise Nyquist bandgenişliği içindeki tüm spektral bileşenlerin toplamının
rms değerini temsil etmektedir. SNDR, giriş işaretinin genliğinin yanısıra frekansına
da bağlıdır. Giriş frekansı Nyquist frekansına yaklaştıkça SNDR değeri azalır. (Şekil
2.13)
SNDR
çizimi,
yüksek
frekans
distorsiyonundan
dolayı
ADDnin
AC
performansının azaldığı noktayı göstermekte ve genellikle “undersampling”
uygulamalarında performansın belirlenmesi amacıyla Nyquist bandgenişliğinin
üzerinde çizilmektedir.
Şekil 2.13: Giriş frekansına göre SNDR değişim örneği
2.1.2.3. Etkili Bit Sayısı
ENOB, gerçeklenen ADDlerde performansı belirlemek için daha yaygın olarak
kullanılan bir ölçüttür.
⎛ Aölçülen_hata(rms) ⎞
⎟
ENOB = N − log 2 ⎜
⎜ Aideal_hata(rms) ⎟
⎝
⎠
17
(2.16)
Yukarıdaki denklemde, N gerçeklenen ADDnin bit sayısını, Aölçülen_hata(rms) çevrim
sonunda elde edilen, ortalaması alınmış gürültü, Aideal_hata(rms) idealde elde edilecek
kuantalama hatası şeklinde ifade edilir.
ENOB uygulanan işaretin frekansına ve genliğine bağlıdır. Bu ölçüt, bir ADDnin ideal
kuantalama hatasının rms değeri ile gerçeklendiği zaman ölçülen gürültünün rms
değerlerinin karşılaştırılmasını yapar. Örneğin: gerçeklenen ADDnin ENOB değeri,
ideal bir ADDnin bit sayısına eşit ise (Ngerçeklenen>Nideal, N bit sayısı), bu durumda
gerçeklenen ADDnin ürettiği gürültünün rms değeri, ideal ADDnin ürettiğininkine
eşittir denir.
SNDR ile doğrudan ilişkisi olduğu için ENOB aşağıdaki formül ile de ifade edilir:
ENOB =
SNDR − 1.763
6.02
(2.17)
Frekans arttıkça, kayıp kod oluştukça, AC/DC non-lineerliği arttıkça, referans ve güç
kaynağında gürültü oluştukça ENOB değeri düşer.
2.1.2.4. Spurlardan Arındırılmış Dinamik Aralık
Çeviriciler yüksek “oversampling” oranlarında kullanıldığında ya da çevircinin
spektral saflığı önemli olduğunda, maksimum işaret genliği ile en büyük distorsiyon
elemanı arasındaki oran önemli olmaktadır. Bu oran spurlardan arındırılmış dinamik
aralık olarak adlandırılır.
SFDR genelde giriş işaret genliğine bağımlı olarak çizilir ve işaret genliğine (dBc) ya
da ADD tam işaret giriş geniliğine (dBFS) bağımlı olarak ifade edilir (Şekil 2.14).
Tam genliğe yakın giriş işareti değerlerinde, spur tepe değeri ilk birkaç harmonikten
en büyük olanı ile belirlenir. Buna karşılık, giriş işareti, tam giriş işaretinin birkaç dB
altına düştüğünde giriş sinyalinin doğrudan harmoniği olmayan spurlardan meydana
gelir. Bu olayın nedeni ADD transfer fonksiyonunun DNL değerinden kaynaklanır.
Bu nedenle, SFDR, kaynağı ne olursa olsun tüm distorsiyonları kapsar.
Saf sinüs girişlerinde, SFDR, temel frekansta (A[Fgiriş](rms)) ortalaması alınmış DFT
değerinin genliğinin, Nyquist bandındaki en yüksek genliğe sahip harmoniğe
(AHD_max(rms)) ya da spur değeri en yüksek elemanın (ASPUR_max(rms)) ortalaması alınmış
DFT değerinin genliğine oranıdır.
Genelde SFDR, işaretin genliğine ve frekansına bağlıdır; fakat bazı durumlarda
ADDnin örnekleme frekansına da bağlı olabilmektedir.
18
SFDRdBc
[
]
⎛ AF
giriş (rms)
⎜
= 20log10 ⎜
⎜ AHD_max(rms)
⎝
⎞
⎟
⎟
⎟
⎠
(2.18)
SFDR değerinin büyük olması için çevircinin ölçülen SNR değeri, teorik değerine
olabildiğince yakın olması gerekir. İntegral lineerliği iyi olan çeviriciler genelde SNR
değerinden daha yüksek SFDR değeri verirler.
Şekil 2.14: SFDRnin işaret genliğine (dBc) ve ADD tam-ölçü işaret giriş geniliğine
(dBFS) bağımlı olarak ifadesi
2.1.2.5. Toplam Harmonik Distorsiyon
Dinamik hatalar ve INL, ADDye peryodik işaretler uygulandığında harmonik
distorsiyona neden olur. Saf sinüzoidal giriş işaretleri sözkonusu olduğunda,
harmonik bileşenler temel frekansın tamsayı katlarında ortaya çıkarlar. Bu
bileşenlerin genlikleri, giriş işaretine göre dB cinsinden oran olarak ifade edilir.
THD, FFT spektrumunda (dc’den fs/2’ye kadar olan bölge) bulunan tüm
harmoniklerin rms değerlerinin toplamıdır. Genelde tüm harmonikler hesaplamaya
katılsada, ilk beş harmonik, THD değerini büyük ölçüde etkiler. Bir ADDnin
performansının belirlenmesinde, haberleşme ve RF/IF uygulamaları sözkonusu
olduğunda, THD ölçütü, DC lineersizlik ölçütünden daha etkilidir (Kaya, 2002).
⎛
⎜
THDdBc = 20log10 ⎜
⎜
⎝
{A
2
HD_2(rms)
2
[ ]
A fgiris
19
2
+ AHD_3(rms) + ... + AHD_N(rms)
(rms)
} ⎞⎟
⎟
⎟
⎠
(2.19)
A[fgiris](rms), temel bişenin rms değeri, AHD_2(rms)’den AHD_N(rms)’ e kadar olan değerler
ise 2.’den N.’ye kadar olan harmonik bileşenleri temsil etmektedir.
THD değerleri dB cinsinden ya da taşıyıcı veya temel bileşen referans alınarak ifade
edilir.
2.1.2.6. İki Tonlu Intermodulasyon Distorsiyonu
Göreli olarak birbirlerine yakın, f1 ve f2 frekanslarındaki iki saf sinüs işaretinin bir
ADDye uygulanması ile ölçülür. Bu iki işaretin genlikleri ADDnin tam işaret giriş
genliğinden 6dB daha düşük uygulanarak, üst üste gelip toplandığında ADD
tarafından işaret kırpılmamış olur. Şekil 2.15’de ikinci ve üçüncü seviye bileşenler
görülmektedir. Şekilden de görüleceği üzere ikinci seviye bileşenler sayısal filtreler
kullanılarak süzülebilirler; fakat üçüncü seviye bileşenler (2f2-f1 ve 2f1-f2) temel
frekanstaki bileşenlere daha yakın oldukları için süzülmeleri daha zordur. Aksi
söylenmediği sürece iki tonlu IMD ile, burada örneği verilen üçüncü seviye gibi
bileşenler kastedilir. IMD sonucu, bu iki orijinal tondan bir tanesine göre dBc
cinsinden göreli olarak ifade edilirler.
Şekil 2.15: İki tonlu IMDnin ikinci ve üçüncü dereceden bileşenleri
İki tonlu intermodulasyon distorsiyonu genelde giriş genliklerinin (A[f1] ve A[f2]) ve
frekanslarının (f1 ve f2) fonksiyonudur. Bu nedenle iki tonlu IMD ölçümleri sırasında
giriş genlik ve frekansları belirtilmelidir. Giriş işaretlerinin, intermodulasyon ve
harmonik distorsiyondan bağımsız olmaları önemlidir. Geniş bandlı ve geniş dinamik
aralıklı ADDler için bu durumun sağlanması biraz zordur.
20
Test için kullanılan, çıkış seviye belirleme devresi, kuplaj devreleri ve işaret
üreteçleri kolayca IMD etkisi yaratabilirler. Bu nedenle, testler sırasında bu
etkilerden kaçınmak için güç bölücü/birleştirici (iki giriş işaretini bölmek veya
birleştirmek için kullanılan yapı) elemanları lineer bölgeleri içinde kullanılmalıdırlar
(Kaya, 2002).
2.2. ADD Performansının Belirlenmesi
Gerçeklenen
bir ADDnin teorik çözünürlüğünün ve çevirme oranının, pratik
uygulamalarda istenilen performansı gösterip göstermediğini anlamak için , bir test
düzeneği hazırlanıp AC ve DC performanslarının ölçülmesi gerekir. Bu test
düzeneği, test edilecek eleman, saat ve işaret girişi olmak üzere iki adet giriş ve
gerektiği kadar çıkıştan oluşmaktadır.
Saat maksimum hızında çalışırken, giriş işaret frekansına ve genliğine bağlı olarak
statik ve dinamik olmak üzere iki tür test uygulanır. Statik test sırasında giriş işareti
yavaş yavaş arttırılır ve DNL, INL, offset ve kazanç hatası gibi statik parametreler
ölçülür. Dinamik testte ise giriş işareti, bir saat darbesinden diğerine hızlıca
değiştirilerek SNR ve THD ölçülür. En gerçekçi ölçümün yapılabilmesi için, giriş
işaretinin tam ölçü aralığında salınım yapması ve band genişliğinin saat frekansının
yarısına eşit olması gerekmektedir.
Pratikte, giriş işareti herhangi bir dalga şeklini alsada, devrenin karakteristik
özellikleri belirlenirken, birçok uygulama için uygun, iyi tanımlanmış düzgün
işaretlerin kullanılması gerekir. Buna ek olarak, giriş işaretleri düzgün şekilde
oluşturulabilir, çıkış işaretleri ise düzgün ölçülebilir olmalıdır (Kaya 2002).
Statik testler için giriş işareti sıfır değerinden tam ölçü işaret genliğine doğru lineer
olarak artan ve idealde tüm kodların oluşmasını sağlayabilecek rampa fonksiyou
olabilir.
Sinüzoidal dalgalar ise birçok özelliği nedeniyle dinamik tetsler için çok uygundur:
•
Zaman ve frekans domeninde, matematiksel tanımları tam olarak yapılabilir
ve analog işaretler gözönüne alındığında filtrelemeyle , sayısal işaretler
gözönüne alındığında sayısal kelime uzunluğunu arttırarak ideal şekillerini
alırlar.
•
Spektral analiz yapılarak distorsiyon ve gürültü gibi idealsizlikleri kolayca
ölçülebilir.
21
•
Tekil frekanslı bileşen olarak, saat frekansının yarı değerine ulaşarak,
devrenin frekans cevabı ile ilgili düzgün ölçüm yapılabilir.
•
Lineer sistemler gözönüne alındığında, karmaşık dalga şekline verilen
cevap, o dalgayı oluşturacak sinüzoidal dalgalara verilecek cevapların
toplamı şeklinde oluşturulabilir.
ADDlerin test edilerek ölçülmesi gereken birçok parametresi bulunmaktadır.
Seçilecek test yöntemine bağlı olarak sayısal çıkışlar ya sürekli zaman ve sürekli
genlikli analog işaretlere dönüştürülerek ya da ayrık işaret analiz teknikleri
kullanılarak sayısal işaret olarak test edilir.
22
3. ANALOG DİJİTAL DÖNÜŞTÜRÜCÜ YAPILARI İLE İLGİLİ TEMEL BİLGİLER
3.1. Analog Dijital Dönüştürücülere Genel Bakış
Birbirlerine göre avantajı ve dezavantajı olan ADDler için bir çok algoritma ve
gerçekleme bulunmaktadır. İşaret bandgenişliği 1Hz’den, 5GHz’e kadar ve
çözünürlüğü birkaç bitten 24 bite kadar olan ADD yapıları literatürde mevcuttur.
Sistemin ihtiyacı olan çevrim sonucunun keskinliği, hızı ve ekonomik avantajı hangi
dönüştürücü yapısının uygulamada kullanılacağını belirler. Açıktır ki, farklı
uygulamalar, farklı sistem parametrelerini gerektirir. Şekil 3.1’de yapılarında ADD
bulunduran sistemlerin, gereksinimlerine göre sınıflandırılmaları yapılmıştır.
Şekil 3.1: Bir çok uygulamada kullanılan ADDlerin hız ve çözünürlük gereksinimleri
Nyquist çeviricler, dönüştürme hızlarına göre üç sınıfa ayrılırlar:
1. Yüksek Hızlı ADDler: Sayısal veriye dönüştürülecek analog örnekler, saat
hızına ya da saat hızının yarısına eşit bir hızda dönüştürücüye verilebilir.
Buna bağlı olarak; dönüştürme işlemi saat hızına eşit ya da saat hızının
yarısına eşit bir zamanda sonuçlanır. Bazı durumlarda, analog giriş
23
yapıldıktan sayısal çıkış verisi elde edilene kadar uzun süreli, değişmez
gecikmeler oluşabilir. Yüksek hızlı ADDlere örnek olarak: paralel (flash) ,
enterpolasyonlu (interpolating), iki-basamaklı (two-step, half-flash), “pipeline”
çeviriciler verilebilir. Bu tipteki çeviricilerin dönüştürme oranları saniyede
0.5Ms’den 10Gs’ye kadar değişmektedir. Elde edilen verinin keskinliği 8
bitten 12 bite kadar değişmektedir. Video, görüntü işleme, radar sistemleri,
yüksek hızlı ADD sistemlerin kullanıldığı alanlara örnek olarak verilebilir.
2. Orta Hızlı ADDler: Bir analog örneği, sayısal veriye dönüştürecek N bitlik
ADD için N saat peryodu gerekmektedir. Bunun sonucu olarak; dönüştürme
işlemi saat hızından N kat daha yavaş olacaktır. Bir çok seri çevirici (başarılı
yaklaşımlar) bu tip ADDlere örnek olarak verilebilir. Bu çeviriciler kullanılarak
10 bitten 14 bite kadar çözünürlük ve saniyede 0.1Ms’den 5Ms’ye kadar
çevrim hızı sağlanabilir. Tipik uygulama alanları: telekominikasyon, kontrol,
düşük-orta hızlı ölçüm sistemleri olarak gösterilebilir.
3. Düşük-Hızlı ADDler: Bu çeviriciler, analog giriş örneğini N bitlik sayısal veriye
dönüştürmek için 2N saat peryoduna gereksinim duyarlar. Bu durum ise çok
yavaş sistem hızına neden olur. Örnek olarak: çözünürlüğün N=16 bit olması
istenirse, 65.536 saat darbesine gereksinim duyulur. Açıkça görülmektedir ki
bu sistemler zamanla değişmeyen veya çok yavaş değişen işaretlerle
kullanılmaya uygundur. Bu katagoriye uyan çeviricilere örnek olarak integral
alıp sayma işlemi yapan (tek rampalı ADD, çift rampalı ADD) çeviriciler
verilebilir. Bu çeviriciler kullanılarak 15 bitten 24 bite kadar çözünürlük elde
edilebilir. Uygulama alanlarına örnek olarak dijital göstergeler (biyomedikal
ölçüm aletleri, dijital voltmetreler) verilebilir. (Gregorian, 1999)
3.2.
Analog Dijital Dönüştürücüler Yapıları
3.2.1. Paralel ADD
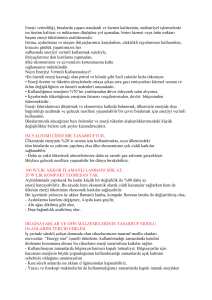
Paralel ADDler, analog işareti en hızlı şekilde sayısal işarete çeviren ADD türüdür.
N-bitlik paralel ADD, 2N adet gerilim bölücü direnç ve 2N-1 adet karşılaştırıcıdan
oluşmaktadır. Şekil 3-2’de N bitlik paralel ADD yapısı görülmektedir. Vgiriş gerilimi,
karşılaştırıcıların pozitif girişlerine uygulanmaktadır. Direnç bölücüler ile elde edilen ,
aralarında bir LSBye karşı gelecek şekilde fark bulunan, referans gerilimleri ise
karşılaştırıcıların negatif girişlerine uygulanmıştır. Giriş gerilimi, ilgili karşılaştırıcıya
uygulanan referans geriliminden büyük ise karşılaştırıcı çıkışında lojik “1” seviyesi,
küçük ise lojik “0” seviyesi elde edilir. Bu sonuçlar ışığında: giriş geriliminin, ilgili
24
referans geriliminden küçük olduğu nokta, karşılaştırıcı çıkışları incelendiğinde
görülecek lojik “1” seviyesinden lojik “0” seviyesine geçiş noktasıdır. “1”’ dan “0”’ a
geçiş noktası, giriş seviyesine bağlı olarak yükselir veya alçalır.
Şekil 3.2: N-bitlik paralel ADD
Lojik “1” ve lojik “0”lardan oluşan koda, bir termometre içindeki civaya benzetilerek,
idealde lojik “0” seviyesinin üzerinde lojik “1” değer olamayacağı varsayılarak,
termometre kodu ismi verilmektedir. Elde edilen termometre kodu, 2N-N bitlik
öncelikli kodlama devresine uygulanarak, analog örneğe karşı gelen sayısal veri
elde edilir.
25
Çeviricilerde kullanılan karşılaştırıcılar, genelde kaskad yapılı, düşük kazançlı ve
geniş bandlı yapılardan oluşmaktadır. Kazancın düşük tutulmasının nedeni, kazançbandgenişliği çarpımının sabit olmasından ileri gelmektedir. Bu sayede yüksek
bandgenişliklerine ulaşılır. Karşılaştırıcılar, offset gerilimleri karşılaştırıcı başına bir
LSB değerinden küçük olacak şekilde tasarlanmalıdır. Aksi takdirde, karşılaştırıcı
offset değeri yanlışlıkla, ilgili karşılaştırıcıyı devreye sokarak termometre kodundan
farklı sayısal çıkış elde edilmesine neden olur (Kaya, 2002).
Paralel ADDde metastabilite, karşılaştırıcı girişine uygulanan giriş gerilimi ve
referans gerilimi arasındaki farkın çok küçük olması nedeniyle, çıkışın olası lojik
seviyeye ulaşma zamanının gecikmesi sonucunda elde edilmesi gereken sayısal
verinin doğru olarak elde edilememesidir. Bu durum ise termometre kodunda,
herhangi bir “0” değerinin üstünde bir “1” değerinin olmasına neden olabilir. Bu
hata, civa içindeki hava kabarcığını çağrıştırdığı için kabarcık (bubble) olarak da
adlandırılır. Bu problemin üstesinden gelmenin yolları, küçük zaman sabitli ve tekrar
oluşturma (regenerative) kazancı optimize edilmiş karşılaştırıcı tasarımı ile
sağlanabilir. Bir başka yöntem ise, karşılaştırıcı çıkışları Gray koduna çevrilir ve
daha sonra Gray-İkili kod çevirici ile ikili koda çevrilir. Bu sayede, karşılaştırıcı
çıkışlarında hata oluşsa bile, Gray
kodunda her seviye arasında yalnızca bir
basamak değiştiği için hata bir LSB ile sınırlı kalacaktır (Kester 2004). Karşılaştırıcı
çıkışlarının Gray koduna çevirmek bazı durumlarda işe yarayabilir ;fakat çevrim
sırasında gecikmelere neden olacağı açıktır.
Yükselme eğiminin büyük değerli olduğu koşullarda da kabarcık hatası ile karşılaşılır
ve bu yüzden karşılaştırıcılardan birisinin cevap anı diğerinden farklı olabilir.
Kabarcık hatalarını bastırmakta kullanılabilecek bir başka yöntem aşağıda
açıklanmıştır:
Ci-1, Ci, ve Ci+1 sırasıyla, (i-1)., i. ve (i+1). karşılaştırıcı çıkışları olduğu varsayılırsa
termometre kodunun son hali verilmeden önce aşağıdaki lojik denklem kullanılarak
bazı kabarcık hataları düzeltilir.
Ci * = C(i −1) • Ci + C(i −1) • C(i +1) + C(i +1) • Ci
(3.1)
Ci* değeri, düzeltme sonrasında i. karşılaştırıcıya karşı gelen çıkış değeridir. Bu
yöntem,
(0000101111),
(0000010111)
ve
(0010011111)
gibi
hataların
düzeltilmesinde bu kullanılabilir; fakat (0001100111) gibi birden fazla “0” değerinin,
birden fazla “1” değeri ile sarıldığı çıkış hatalarında bu yöntem işe yaramayacak,
daha karmaşık yöntemlere ihtiyaç duyulacaktır (Mangeldorf, 1990).
26
İdealde, paralel ADDlerde kullanılan karşılaştırıcılar dc ve ac karakteristikleri
birbirine denk olacak şekilde tasarlanırlar. Pratikte ise , yüksek frekanslarda bu
karşılaştırıcılar arasında gecikme ve ac uyumsuzluklardan kaynaklanan farklılıklar
ENOBda azalmaya neden olur. Bu nedenle, yüksek frekanslarda yüksek SFDR elde
eldilmesi için örnekleme ve tutma devreleri kullanılır (Kester, 2004).
Paralel ADDlerin performansını belirleyen etmenlerden birisi de saat jitteridir. Saat
jitterinin düşük olmadığı durumlarda, ADD için belirlenen SNR değeri düşecek ve
yüksek frekanslarda daha da belirgin hale gelecektir.
Bu tip ADDlerin gerçeklenmesinde karşılaşılan sorunlar; yüksek hızlı karşılaştırıcı
gereksiniminden dolayı yüksek güç harcaması, büyük çip alanına gereksinim olarak
sayılabilir. Bunlara ek olarak, karşılaştırıcıları sürecek kadar yüksek akım
akıtabilecek referans kaynağına ihtiyaç duyulur. Bu nedenlerden dolayı, paralel ADD
çözünürlükleri 8 bit ile sınırlı tutulur. Çözünürlükleri bir bit arttırmak için devrede
kullanılan elemanların saysını iki katına çıkarmak gerekir ki bu ise gerekli olan gücü
ve çip alanını iki katına çıkarır. Tüm bu sorunlara karşın, paralel ADDler, yüksek
frekanslara sahip işaretlerin sayısal veriye dönüştürülmesinde kullanılabilecek tek
yapı olabilmektedir.
3.2.2. İki Basamaklı ADD
Yüksek hızlı çevircilerin güç harcamasını azaltmak ve çözünürlüğünü arttırmak için
sıkça kullanılan yöntem iki basamaklı ADD yapısıdır (Cable ve Harjani, 1994). Şekil
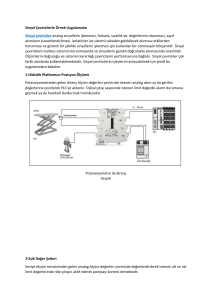
3.3’ te, basit yapılı N-bitlik iki basamaklı ADD örneği görülmektedir. Bu tür
çevircilerde çevrim iki basamakta yapılır: ilk basamakta çevrimi yapan N1-bitlik ADD
ve ikinci basamakta çevrim yapan N2-bitlik ADD. Bu tür ADDler ilk tasarlandıkları
zaman iki basamakta kullanılan çeviriciler genelde paralel ADDler kullanılmaktaydı;
fakat son zamanlarda tasarlanan bazı yapılarda başka türde alt ADDler
kullanılmaktadır (Kester,2004).
Çevrim işlemi, analog işaretin örnekleme ve tutma devresine girişi ile başlamaktadır.
Tutulan bu işaret çevrim sonuna kadar aynı şekilde muhafaza edilmelidir. Tutma
devresini, sayısal işaretin MSB bölümünün elde edilmesini sağlayacak N1-bitlik
kabaca çevrim yapan ADD izler. Bu sayısal veri, N1-bitlik dijital analog dönüştürücü
ile analog değere çevrilerek tutulmuş işaretten çıkarılır ve artık işaret elde edilir. Bu
yeni artık değer incelikli ADDden geçirilmeden önce G kazançlı kuvevtlendiriciye
uygulanarak ikinci ADDnin giriş aralığı için uygun değere çekilir. N1-bitlik ADD ve n2
bitlik ADD çıkışları uygun şekilde birleştirilerek N=N1+N2 bitlik sayısal çıkış verisi
elde edilir.
27
Şekil 3.3: Basit yapılı N-bitlik iki basamaklı ADD
Bu basit iki basamaklı ADDnin doğru çevrim yapabilmesi için; kullanılan N1-bitlik ve
N2-bitlik ADDlerin çözünürlüklerinin, N-bitlik ADDden daha iyi olması gerekir
Genelde, iki basamaklı çeviricilerde çözünürlük 8 bit ile sınırlı olduğu sürece kayıp
kod oluşma ihtimali çok düşüktür. Çözünürlüğü 8 bitin üzerine çıkması durumunda,
yukarıda bahsedilen hatanın oluşmaması için gerekli önlemlerin alınması gerekir.
(Kester, 2004).
İki basamaklı ADDlerde, iki farklı lineersizlik kaynağı gözlemlenir. Birincisi, ilk
basamaktaki çevrimin düzgün yapılamamasından, ikincisi ise kullanılan DAD ve
çıkartma devresindeki kazanç ve tranzistor uyumsuzluklarından kaynaklanan
lineersizlikten dolayı ortaya çıkar. Bu iki sorunun çözümünde kullanılan yöntemler
sırasıyla sayısal hata düzeltme ve sayısal kalibrasyon yöntemleridir. Sayısal hata
düzeltme işlemi, ilk basamaktaki ADD ile ilişkili olup ikinci ADDden elde edilen
sayısal çıkışın MSBsinin ilk basamaktaki ADDnin sayısal çıkışındaki LSB değeri ile
üstüste gelecek şekilde sayısal toplama devresi kullanılarak toplanması ile yerine
getirilmektedir. Sayısal kalibrasyon ise, hatalar belirlendikten sonra depolandıkları
RAMden alınıp kalibre edilmemiş –sadece düzeltilmiş- işaretten çıkarılması ile
gerçekleştirilmektedir (Oliveira ve diğ., 1996).
Bitler üstüste bindirilerek, artık işaretin ikinci basamaktaki çevircinin giriş aralığına
düşmesi sağlanır. Örnek olarak: Bitleri üstüste bindirme yöntemi uygulanırken
yalnızca bir bit kullanılıyorsa, ikinci basamağın kuantalama aralığı, ilk basamakta
oluşan ve bu basamağın 0,5 LSB değerinde olabilecek hataları düzeltebilecek kadar
arttırılır. Bu sayede de ilk basamaktaki karşılaştırıcıların keskin sonuç verme
28
zorunluluğu ortadan kaldırılmaktadır. Şekil 3.4’de sayısal hata düzeltme yöntemi
kullanılmış iki basamaklı ADD görülmektedir.
Çeviricide kullanılan DAD ve çıkartma devresi, işaret yolu üzerindeki anahtar
elemanlardır. Bu nedenle çevirme oranını arttırmak için hızlarını ve lineerliklerini
olabildiğince yüksek tutmak gerekir.
Çıkartma devresinde kullanılan kuvvetlendiriciyi birim kazançlı veya daha yüksek
kazançlı yapmanın avantaj ve dezavantajları sözkonusudur. Çıkartma devresinin
kazancını birkaç kat arttırmak, ikinci basamaktaki ADDnin tasarımını kolaylaştırır.
Buna
karşılık,
bu
çevirici,
çıkatma
devresinin
çıkışı
ile
referans
girişini
karşılaştıracağı için kazanç ayarlaması kullanılarak kontrol edilmeli; böylece
çıkartma devresinini tam ölçü işaret çıkış genliği ile ikinci çeviricinin tam ölçü
referans işaret genliği birbirleri ile uyumlu olması sağlanmalıdır (Shimizu ve diğ.,
1989). Kazanç-bandgenişliği ve kazanç-lineerlik ilişkisi gözönüne alındığında ise,
çıkartma devresinin örnekleme oranını ve lineerliğini yüksek tutmak için birim
kazanç uygulamak yerinde bir çözüm olabilir; fakat ikinci basamakta kullanılan ADD
küçük giriş işaretlerini algılayabilecek keskinlikte çevrim yapabilmek üzere
tasarlanmalıdır. (Razavi ve Wooley, 1992).
Şekil 3.4: Sayısal hata düzeltme yöntemi uygulanmış N- bitlik iki basmaklı ADD
Artık işaret, N2-bitlik ADDnin girişine uygulanabilecek sınırlar içinde kaldığı sürece,
sayısal hata düzeltme yöntemi şu hataları düzeltebilir: örnekleme ve tutma
devresinin çıkışında elde edilecek işaretin yerleşme süresi hatası, N1-bitlik ADDnin
29
lineerlik, kazanç ve offset hatası, N1-bitlik DADnin offset hatası, artık işaret
kuvvetlendiricisinin offset hatası. N1-bitlik DADnin lineerlik hatası ve artık işaret
kuvvetlendiricisinin kazanç hatasını düzeltmek için ise sayısal kalibrasyon yöntemi
kullanılmaktadır.
İki basamaklı ADDler kullanılarak güç kullanımı ve çözünürlük gibi konularda büyük
avantajlar sağlansada, sistemin lineerliğinin ve doğruluğunun yüksek tutulması,
kullanılan ADDler, DAD ve çıkartma devresinin giriş çıkışlarının birbirleri ile
uyumluluğu çeşitli yöntemler kullanılarak – sayısal hata düzeltme ve sayısal
kalibrasyon- sağlanması gerekir.
3.2.3. “Pipelined” ADD
“Pipelined” ADDler ile birkaç Ms/s’den 100Ms/s’ye kadar örnekleme hızına
çıkabilirken yüksek çözünürlük seviyeleri elde etmek mümkün olmaktadır. Düşük
çevrim hızlarında 16 bite, yüksek çevrim hızlarında ise 8 bite kadar çözünürlük
arttırılabilir. Genelde ultrasonik ve kızılötesi görüntüleme sistemlerinde,dijital
alıcılarda, baz istasyonlarında, dijital video uygulamalarında yaygın olarak
kullanılmaktadır.
“Pipelined” uygulaması şu şekilde ifade edilir: bir hat üzerinde birçok işaret işleme
safhası bulunur ve buların her birinde bulunan Ö/T devreleri ile aynı anda farklı
örneklenip tutulmuş işaretler üzerinde işlemler yapılabilir.
Şekil 3-5: “Pipelined” ADD blok diyagramı
30
Şekil 3-5’de “pipelined” ADD blok diyagramı görülmektedir. Bu şekilde gösterilmiş
olan safhaların herbirinde n bitlik dönüşüm yapılmaktadır. Her safhada kullanılan
bite dönüştürme sayısı eşit olmayabilir; fakat eşit olduğu takdirde ADD en iyi
performans için optimize edilmiş olur (Kester, 2004).
Literatürde bulunan “pipelined” ADD türleri çeşitli kıstaslar gözönüne alınarak çözünürlük,
hız
vs.-
her
safhada
N-bitlik
veya
1-bitlik
ADD
kullanılarak
oluşturulmuştur(Bilhan and Gosney, 1999, Real ve diğ., 1991, Sone ve diğ., 1993,
Wu ve Liow, 2000).
“Pipelined” ADD çalışma prensibi şöyle açıklanabilir: Dönüşümü yapılacak olan
işaret ADDye uygulandığı zaman girişte bulunan Ö/T devresi ile örneklenip tutulmuş
işaret elde edilir. Bu işaret N bitlik ADD ile sayısal işarete dönüştürülür. Elde edilen
sayısal işaret bir yandan “pipeline” kütüğü ve hata düzeltme devresine gönderilirken
bir yandan da N bitlik DADye uygulanır. DAD çıkışındaki analog veri, safha girişinde
örneklenip tutulmuş işaretten çıkarılır ve elde edilen artık işaret 2N kazançlı
kuvvetlendiriciden çıkarılarak bir sonraki safha için hazır hale getirilir. Aynı işlemler son safha hariç- diğer safhalarda da aynı şekilde uygulanır. Son safha N-bitlik
ADDden oluşur. Bazı “pipelined” ADD tasarımlarında DAD, kuvvetlendirme ve
çıkarma devreleri yerine aynı işlemleri bir arada yapan tek bir mDAD yapısı
kullanılabilir.
Her safhada bulunan Ö/T devresinden dolayı i. safhadaki çevirme işlemi bittikten
sonra artık işaret (i+1). safhaya gönderildikten sonra i. safha, (i-1). safhanın
çıkışındaki veriyi örnekleyip tutatrak yeni bir çevrim işlemini gerçekleştirebilir.
Her örnek tüm safhalardan ayrı ayrı geçip sayısal veriye dönüştüğü için “pipelined”
gecikmesi adı verilen ve safha sayısı ile kullanılan alt ADD yapılarının fonksiyonu
olan gecikme söz konusu olur (Kester, 2004). Şekil 3-6’ de bu gecikme örneği
görülmektedir.
Analog veriyi sayısal veriye çevirme yöntemi bakımından “pipelined” ADDler, iki
basamaklı ADDlere benzemektedir. “pipelined” ADDnin en büyük farkı
her
safhasında Ö/T devresinin olmasıdır. Bunun yanısıra safha sayısı ikiden fazla ve
safha başına bit sayısı daha düşük yapılarak tasarımcı açısından çevrim zamanı ve
çip alanı ilişkisini düzenleme hakkı oluşur (Geiger ve diğ., 1990).
“Pipelined” ADD performansı kullanılan Ö/T devresinin performansına bağlılığı
yüksek olduğu için Ö/T devresinin hızı ve doğruluğu yüksek olmalıdır. Bunun
yanısıra, çeviricinin hızı ve lineerliği doğrudan ADDlere, DADlere, çıkartma
devrelerine ve dijital toplama devrelerine bağlıdır. İki basamaklı ADDde olduğu gibi
31
iki farklı lineersizlik kaynağı gözlemlenir. Birincisi, alt ADDlerin çevrimi düzgün
yapmamasından, ikincisi ise kullanılan DAD ve çıkartma devrelerindeki kazanç ve
tranzistor uyumsuzluklarından kaynaklanan lineersizlikten dolayı ortaya çıkar. Bu iki
sorunun çözümünde kullanılan yöntemler sırasıyla sayısal hata düzeltme ve sayısal
kalibrasyon yöntemleridir. Bu yöntemlerle ilgili bilgi, iki basamaklı ADD yapıları ile
ilgili bölümde anlatılmıştır.
Şekil 3-6: “Pipeline” gecikmesi
3.2.4. Başarılı Yaklaşımlar Kütüklü ADD
Başarılı yaklaşımlar kütüklü (SAR) ADDler, 5Ms/s örnekleme hızının altında olan 8
bitten 16 bite kadar orta-yüksek çözünürlük ve düşük güç gerektiren sistemlerde
kullanılmaktadır. Bu özellikleri nedeniyle, mikrokontrolör tabanlı sistemler ve akü
beslemeli sistemler için uygun çözümler sunmaktadır.
SAR ADD, geri beslemeye dayalı deneme-yanılma yöntemi kullanılarak analog
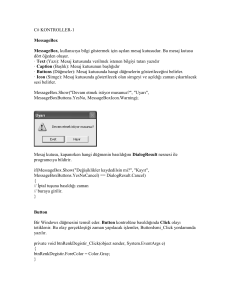
işareti, sayısal veriye yaklaştırmaya çalışır. Şekil 3-7’de N-bitlik SAR ADD blok
diyagramı görülmektedir. Blok diyagramdan da görüleceği gibi SAR ADD yapısında,
Ö/T devresi, DAD yapısı, SAR, ve gerilim karşılaştırıcı bulunmaktadır. Çalışma
prensibi şöyle açıklanabilir: Analog giriş işareti, ADD girişinde bulunan Ö/T devresi
tarafından örneklenip tutulur. Yukarıda da bahsedildiği gibi deneme-yanılma yöntemi
kullanılarak çevrim işlemi başlar. İlk olarak n bitlik kütüğün MSB değeri lojik “1” ,
geri kalan bitler lojik “0” yapılır (100...00). Bu sayısal değer, DADden geçirilerek
Vref/2 değeri elde edilir ve tutulmuş analog işaretten çıkarılarak kuvvetlendirilir.
Analog işaret, DAD çıkış işaretinden büyük ise karşılaştırıcı çıkışında lojik “1”
seviyeli işaret, küçük ise lojik “0” seviyeli işaret elde edilir. Karşılaştırıcı çıkışının
değeri, kontrol devresine yönlendirildiği için elde edilen sonuç SARdeki ilgili bitin
değerinin korunmasına veya değişmesine –lojik “0” seviyeye çekilmesi- karar
32
verecektir. Bu işlemler, ikinci, üçüncü… N. en anlamlı bite kadar sırayla yalnızca
ilgili bitin lojik “1” seviyeye çekilerek DAD çıkışının tutulmuş analog giriş işareti ile
karşılaştırılmasına ve daha sonra da sonucun doğru olup olmamasına bakarak ilgili
bitin lojik ”1” veya lojik “0” seviyeye ayarlanması ile gerçekleştirilir. Bu işlemler
toplam bit sayısı kadar tekrarlanır ve bittiğinde n bitlik sayısal veri kütükte hazır
halde bulunmaktadır.
Şekil 3-7: N-bitlik SAR ADD blok diyagramı
Şekil 3.8: 2-bitlik SAR ADD çevriminin grafiksel gösterilimi
33
Şekil 3-8’de 4 bitlik bir SAR ADD’nin çevrim aşamaları göstrerilmiştir. Kalın çizgiler
Vreferans değerini , ince çizgi ise Vin değerini temsil etmektedir. İlk karşılaştırmada
Vgiriş<VDAC lduğu için bit3 lojik “0” seviyeye çekilmiştir. İkinci karşılaştırmada giriş
işareti daha büyük olduğu için bit2 lojik “1” seviyede bırakılmıştır. Üçüncü
karşılaştırmada, karşılaştırma sonucu küçük olduğu için bit1 lojik “0” seviyeye
çekilmiş ve son olarak dördüncü karşılaştırma sonucu büyük olduğu için bit0 lojik
seviyesini korumuş ve 01012 sonucu elde edilmiştir. Görüldüğü gibi 4-bitlik sayısal
veri eldesi için 4 çevrim sonucunda analog sayısal dönüştürme işlemi sonlanmıştır.
SAR ADDlerin çevirme işleminin doğruluğu ve lineerliği, yapısındaki DAD elemanına
bağlıdır. DADden istenilen özellikleri sağlanabilmesi için yapısında ince film dirençler
kullanılmaktadır. Bu ince film dirençlerin maliyetinin yüksek olması ve kılıfa
uygulanabilecek baskıdan kolay etkilenmesi nedeniyle günümüz uygulamalarında
yeni DAD yapıları oluşturulmaya çalışılmıştır (Kester, 2004). Bulunan çözümlerden
birisi, anahtarlamalı kapasitörler kullanılarak oluşturulan ve elektrik yükü dağılımının
esas alındığı DAD kullanımıdır (Gregorian, 1999). Lineerliği ve doğruluğu etkileyen
bir diğer etken ise karşılaştırma elemanının, girişine uygulanan tutulmuş giriş işatreti
ile DAD çıkışındaki analog işaret arasındaki küçük farklılıkları sezebilme yeteneğinin
sınırlı olabilmesidir. Bu iki önemli yapı elemanının uygun tasarlanması sonucunda
SAR ADD’nin performansı istenilen düzeylere çekilebilir.
Orta hızda çevirme oranı ve bit düzeyinde çalışma özelliği nedeniyle SAR ADDler,
sayısal verinin seri olarak iletilmesi için çok uygundur.
3.2.5. İntegral Almaya Dayalı ADD
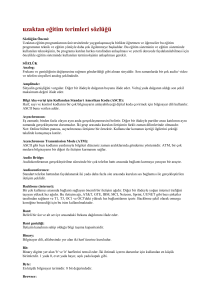
Şekil - 3.9: Tek eğimli analog dijital dönüştürücü yapısı
34
İntegral almaya dayalı analog sayısal çeviriciler, düşük çevrim hızının kabul edilir ve
yüksek doğruluğun gerekli olduğu ugulamalar için uygundur. Çevrimin yavaş
olmasından dolayı düşük bandgenişlikli işaretlerin sayısal değerlerinin elde edilmesi
için uygundur. Bu çeviriciler, yapılarına LED ve LCD sürme devreleri eklenerek
sayısal panel ölçü aletleri gibi portatif ölçü aletlerinde kullanılırlar.
Şekil - 3.10: Tek eğimli analog dijital dönüştürücünün zamanlama eğrileri
Genelde, bu dönüştürücülerde ilk olarak analog işaret giriş işareti ile orantılı zaman
aralıklarına, daha sonra yüksek doğruluklu saat devresi ve sayaç ile sayısal veriye
dönüştürülerek doğrudan olmayan dönüştürme işlemi gerçekleştirilir. Tek ve çift
eğimli ADDler integral alıcı ADDlere örnek olarak verilebilir. Özellikle çift rampalı
ADDlerde ,uzun çevrim süresi işaretin ortalamasını alarak gürültüyü azalttığı için,
sayısal voltmetre uygulamaları için çok uygundur (Gregorian, 1999).
35
Şekil-3.9’ da tek rampalı ADD yapısı görülmektedir. Devre, bir adet resetlenebilir
kapasitörü bulunan integral alıcı, bir adet karşılaştırıcı, bir adet dijital sayaç ve bir
adet de kontrol devresinden oluşmaktadır. İntegral alıcı devre doğruluğu yüksek
referans voltajını rampa işaretine dönüştürür. Dönüştürme işlemi başlamadan önce
dijital sayaç resetlenir ve integral alıcının kapasitöründe birikmiş olan yükler serbest
bırakılır. Dönüştürme işlemi başladığı anda integral alıcı referans işaretinin
integralini almaya başlar ve giriş işareti, Vgiriş, karşılaştırıcının pozitif girişine
uygulanır. Bu sırada kontrol devresi, girişine gelen saat darbelerini sayan dijital
sayacı devreye sokar.
Referans geriliminden elde edilen rampa işareti, Vin
geriliminden küçük olduğu sürece AND kapısının çıkışında saat darbeleri
oluşacaktır. Bu işaret Vgiriş değerine ulaştığı anda sayma devresi durur ve çevrim
sona erer. Şekil 3.10’da tek eğimli integral alıcı ADDnin zamanlama eğrileri
görülmektedir. Bu işlemler ile analog işaret seviyesi, saat darbelerinin sayılmasıyla
elde edilen zaman aralığına karşılık gelir. RC integral alıcının zaman sabitini,
|Vreferans| referans gerilimini, t1 ise rampa işaretinin giriş işaret seviyesine ulaşması
için geçen süreyi temsil eder.
t1 = RC
Vgiriş
Vreferans
(3.2)
Şekil -3.11: Çift eğimli analog dijital dönüştürücü yapısı
(3.2) numaralı denklemden de görülebileceği gibi çıkış değerinin doğruluğu
kullanılan R ve C elemanlarının toleranslarına doğrudan bağlıdır. Buna ek olarak;
işlemsel kuvvetlendirici ve karşılaştırma devresinin offset değerleri, rampa işaretinin
başlangıç noktasının belirsizliği bu çevirciler için ideal olmayan etkiler olarak
sayılabilir. Bu etkilerden kurtulmak için bir çok devre tekniği kullanılabilir. İntegral
36
alıcı devredeki eleman değerlerinin ideal olmayan etkileri çift eğimli yapının
kullanılması ile giderilebilir.
Şekil 3-11’ de çift eğimli integral alıcı analog dijital dönüştürücü yapısı görülmektedir.
Bu tür çeviricilerin, kullanılan devre elemanlarından ve saat frekansından bağımsız
olması nedeniyle tek eğimli çeviricilere göre belirgin üstünlükleri vardır. Devrenin
çalışma prensibinin tek eğimli yapıdan farkı, iki fazda çalışmasıdır. İlk fazda Vin giriş
işareti sabit bir süre boyunca ,genelde t1=2N saat darbesi süresince, integrali alınır.
Bu işlemden hemen sonra sayaç sıfırlanır ve -Vref ,referans gerilimi, integral alıcının
girişine uygulanır. Bu durumda integral alıcının çıkışı rampa aşağıya doğru azalarak
t2=n saat darbesi sonunda sıfır değerine ulaşır. Bu bilgiler ışığında aşağıdaki şu
bağıntı yazılabilir:
⎛V
t 2 = t1 ⎜⎜ in
⎝ Vref
⎞
⎟⎟
⎠
(3.3)
Rampa işareti, yukarı ve aşağıya doğru oluşturulurken integral alıcının RC zaman
sabitinden aynı şekilde etkilendikleri için çevirici sonucu bu ideal olmayan etkiden
bağımsızdır. Çeviricinin DNL değeri çok iyi sonuçlar verir. Bunun yanısıra integral
alınması ile yüksek frekanslı gürültü ve besleme kaynağından gelebilecek gürültü
filtre edilebilir. Bu üstünlüklere rağmen, iki integral alma işleminden dolayı çevrim
hızı tek eğimli yapıya göre yarı değerine düşebilir. Şekil 3.12’de çift eğimli integral
alıcı ADDnin zamanlama eğrileri görülmektedir.
Şekil -3.12: Çift eğimli analog dijital dönüştürücünün zamanlama eğrileri
37
Tek eğimli dönüştürücülerde olduğu gibi çift eğimli dönüştürücülerde, işlemsel
kuvvetlendiricilerden ve karşılaştırıcılardan kaynaklanan offset soruna duyarlıdır.
3.2.6. Algoritmik ADD
Algoritmik ADDler, belirli bir çözünürlük için en küçük çip alanını kaplar ve VLSI
işlemleri ile tam uyumluluk gösterir.
Bu method kısaca şöyle özetlenebilir:
Giriş işareti , Yg, ilk olarak iki katı değere çıkarılır ve yeni elde edililen değer , 2Yg,
referans işareti, Yref, ile karşılaştırılır. Eğer 2Yg, referans değerinden küçük ise
sayısal çıkış lojik “0” seviyeye çekilir ve 2Yg bir sonraki döngüde kullanılacak Yg
değeri olarak atanır. Eğer 2Yg, referans değerinden büyük ise sayısal çıkış lojik “1”
seviyeye çekilir ve 2Yg değerinden Yref değeri çıkartılarak bir sonraki döngü de
kullanılacak Yg değeri olarak belirlenir (Toumazou ve diğ 1990). Şekil 3.13’de
algoritmik çevrim görülmektedir. Her döngüde yalnızca bir bit elde edilir ve istenilen
çözünürlük elde edilene kadar bu döngü devam ettirilir.
Şekil 3.13: Algoritmik ADD için çevrim algoritması
Akım modlu algoritmik ADDler, gerilim modlu algoritmik ADDlere göre keskinliği
yüksek, örnekleme oranı arttırılmış ve çip alanı düşürülmüş yapılar kurulmasını
sağlamaktadır (Nairn ve diğ. 1988a). Bu belirgin farklılıklar, bu tür ADDlerde akım
modlu yapıyı daha ön plana çıkarmıştır. Şekil 3.14’de basit akım aynaları
kullanılarak oluşturulmuş bir bitlik algoritmik ADD hücresi görülmektedir.
38
Şekil 3.14: Basit akım aynaları kullanılarak oluşturulmuş bir bitlik algoritmik ADD
hücresi
Algoritmik ADD yapılarında kullanılan akım aynalarındaki uyuşmazlık ve ideal
olmama durumları, bu çeviricilerin performansını etkileyen en önemli neden
olmaktadır (Giustolisi ve diğ. 2002). Basit akım aynalarının çıkış direncinin yeterince
yüksek olmamasından ve tranzistorlar üretilirken tranzistor parametrelerindeki (Vt
eşik gerilimi uyuşmazlıkları) sapmalar eşleniklik sorunu yarattığı için, akımların farkı
alınırken sorunlarla karşılaşılır.
Çıkarma sorununun üstesinden gelmek için uygulanabilecek yöntemlerden birisi
basit akım aynası yerine kaskod akım aynasından yararlanmaktır. Akım aynasının
çıkış direncinin artmasına karşılık, geçit gerilimini azaltacağı için parametre
uyuşmazlıkları daha belirgin hale gelecektir. Şekil 3.15’de kaskod akım aynalı yapı
görülmektedir(Toumazou ve diğ, 1990, Kaya, 2002).
Vt parametre uyuşmazlığı sorununun üstesinden gelebilmek için, geçit gerilimini
olabildiğince yüksek tutmak; çıkış direncinin sınırlı olmasından kaynaklanan çıkarma
sorununu minimum seviyeye indirmek için ise akım aynasının giriş ve çıkış
gerilimleri eşit tutulması gerekir. Bu istenilen özellikler aktif akım aynaları
kullanılarak sağlanabilir (Nairn ve diğ. 1988b). (Aktif akım aynaları bir sonraki
bölümde ele alınacaktır). Aktif akım aynaları kullanılarak oluşturulmuş algoritmik
ADD Şekil 3.16’de görülmaktedir.
39
Şekil 3.15: Kaskod akım aynaları kullanılarak oluşturulmuş bir bitlik algoritmik ADD
hücresi
Şekil 3.16: Aktif akım aynaları kullanılarak oluşturulmuş bir bitlik algoritmik ADD
hücresi
40
Algorotimik analog-sayısal çeviricilerin hızını arttırmak için, kullanılan akım
aynalarının ve karşılaştırıcıların yerleşme süresini azaltmak gerekir. Çözünürlüklerini
arttırmak için ise:
•
basit akım aynalarının kullanıldığı durumda, akım aynalarının çıkış dirençleri
yüksek tutulmalı,
•
kaskod akım aynaları kullanıldığında besleme gerilimi olabildiğince yüksek
tutulmalı,
•
aktif akım aynalarının kullanıldığı durumlarda ise, eleman uyumluluğu
geliştirilmelidir.
3.2.7. Diğer ADD Yapıları
Bir önceki başlıklarda anlatılan ADD türleri yanında literatüre girmiş birkaç çeşit
ADD türü daha vardır. Bunlardan ilki “folding and interpolating” (gruplama ve
enterpolasyon) tekniklerine dayalı ADDlerdir.
Paralel modlu ADDlerde 8 bitin üzerine, karşılaştırıcıların sayısının çok fazla
olmasından
dolayı
çıkılamaması
gruplama
ve
enterpolasyon
kullanılarak
çözülmüştür. Herhangi bir çevrim anında, geçiş gerilimi giriş gerilimi yakınında
bulunan az sayıda karşılaştırıcı kullanılır bilgi sağlayabilir. Bu nokta gözönüne
alınarak karşılaştırıcı sayısı azaltılabilir. Elde edilmesi gereken sayısal verinin
yalnızca LSB değerleri elde edilebilir. Bu nedenle kaba ADD yapısı kullanılarak eş
zamanlı olarak MSB değerleri de elde edilir. Gruplama tekniğinin derecesi,
azaltılacak karşılaştırıcı sayısı ile gruplandırılmış işaretlerin hızının arttırılması
arasındaki ilişkiye bağımlıdır (Flynn and Sheahan, 1998).
Gruplandırma tekniği kullanıldığında elde edilen karşılaştırıcı çıkışları birbirlerine
benzesede aralarında belirli offset değerleri vardır. Bu farklılıktan yararlanılarak iki
grup arasına ,enterpolasyon tekniği kullanılarak, bir üçüncü grup eklemek mümkün
olmaktadır.
Enterpolasyon
tekniği
ile
devrenin
yüksek
çözünürlüklere
güç
harcamasını arttırmadan ulaşmasının yanısıra, grupların girişinde oluşabilecek
offset hatalarının yol açacağı DNL hataları da azaltılmış olur (Flynn and Sheahan,
1998).
Yüksek çözünürlük seviyelerine ulaşmak için kullanılan bir başka ADD türü de
sigma-delta (∑∆) çeviricilerdir. Çalışma prensibi işaretin “oversampling” edilmesi ve
integralinin alınmasına , daha sonra da bu integrali alınan işaretin bir bitlik DADden
geçirilip giriş işareti ile karşılaştırıldıktan sonra tekrar integratörün girişine
uygulanması ile sağlanır. Bu işlem çok yüksek “oversampling” hızında yapılır ve
41
çıkışında”0” ve “1”lerden oluşan sayısal veriler oluşur. Bu veriler sayısal filtreden
geçirilerek ikilik düzende sayısal veriler elde edilir (Kaya, 2002)
42
4. AKIM MODLU PARALEL ADD YAPISI
4.1. Akım Modlu ve Gerilim Modlu Devrelerin Karşılaştırması
MOS tranzistorların kendine özgü gerilimi veya yük paketlerini depolama ve taşıma
kabiliyeti nedeniyle, analog tümleştirilmiş devre tekniği geliştirilirken, gerilim
parametresinin aktif tasarım parametresi olarak alınmasını sağladı. Buna karşılık,
daha
küçük
tranzistor
geometrilerine
doğru
gidilmesi,
besleme
geriliminin
azaltılmasını gerektirdiğinden, bu devrelerin dinamik performansı sınırlanmaktadır.
Aynı zamanda, yüksek band genişliklerine çıkma isteği daha hızlı ADDlere ihtiyaç
duyulmasına neden olmaktadır. Bu sorunlara çözüm olarak, akım modlu veya akımgerilim kombinasyonuna dayalı ADDler üzerinde çalışmalar yapılmaktadır (Nairn ve
diğ., 1989).
Aktif elemanların lineer olmayan I-V ilişkisi kullanılarak, giriş veya kontrol geriliminde
yapılacak küçük değişimler çıkış akımında büyük değişikliklere neden olmaktadır.
Sonuç olarak, düşük besleme gerilimi için akım modlu işaretlerin kullanılabilir
dinamik aralığı, gerilim modlu işaretlere göre daha geniş olabilmektedir. Aynı
zamanda, bir düğüme akan akımdaki değişiklik, o düğümdeki gerilim düzeyini
değiştirmek gerekliliğini göstermeyebileceği için her zaman karşılaşılan ve değişen
gerilim düzeyi nedeniyle dolup-boşalması gereken parazitik kapasiteler akım modlu
devrelerin performansını azaltmayacaktır. Bu anlatılanlar ışığında, akım modlu
devreler iki potansiyel avantaj sağladığı görülmektedir: gelişmiş dinamik aralık ve
işlem hızında artış.
4.1.1. Gerilim Modlu ADDler
Kullanılan ADD tasarım tekniğinden bağımsız olarak, aranılan performans ölçütleri:
yüksek hız, yüksek çözünürlük ve düşük güç kullanımıdır. Bir ADD, büyük bir VLSI
sistemin parçası ise, dikkatle üzerinde durulması gereken noktalar olabilir. İdealde,
devre minimum alan kaplamalıdır. Mümkün olan en yüksek performansın devreden
alınabilimesi için dayanıklı olması gerekir. Ek olarak, devre, yapım sırasında
karşılaşılabilecek değişimlerden etkilenmemeli veya kalibrasyondan kaçınılmalıdır.
Farklı çevrim prensiplerine dayalı ,paralel ADD, SAR- ADD, algoritmik ADD, gerilim
modlu
ADD devreleri tasarlanmıştır. Bu yöntemler içinde paralel modlu ADDler en
43
hızlı çevrim yöntemine örnek olarak verilebilir. Diğer yöntemler ise daha yavaş kalır
ki;
bunun nedeni bir düğümün, çevrim sırasında bir çok kez dolup-boşalması
gerekliliğidir. Özellikle SAR ADD ve algoritmik ADDlerden
iyi sonuçlar elde
edebilmek için yüksek performanslı karşılaştırıcıların kullanılmasını gerektirmektedir
(Nairn ve diğ., 1989). Gerilim modlu ADDler kullanılarak, yüksek hızlı ve yüksek
çözünürlüklü ADDler tasarlanmış olsada, bu devrelerin çoğu ek kalibrasyon
devrelerine ihtiyaç duymaktadır.
4.1.2. Akım-Gerilim Kombinasyonuna dayalı ADDler
İyileştirilmiş örnekleme hızlarına ulaşabilmek için akım-gerilim kombinasyonuna
dayalı devreler önerilmiştir.Tümleştirilmiş ya da ayrık ADDlerde sıkça kullanılan
yöntem, integralli çevrim tekniğidir. Bu yaklaşımla, çevrilmesi gereken işaret ilk
olarak bir kapasitörde gerilim olarak depolanır ve daha sonra bir akım kaynağı ile bu
kapasitör boşaltılır. Bu sırada bir dijital saat depolanan işaretin kapasitörden
boşalma süresini belirleyerek işaret seviyesinin hesaplanmasını sağlar. Bu ADD
örneği, işlem hızında belirgin artış sağlasada gerekli gerilim salınımı ile ilgili yenilik
getirmez (Nairn ve diğ., 1989).
4.1.3. Akım Modlu ADDler
Akım modlu ADDler, yüksek besleme gerektiren devreler olarak tasarlanmadıkları
için, mikronmetre altı işlemler veya düşük güçlü uygulamalar için uygundur. Akım
modlu ADDler, VLSI tekniği ile uyumlu, büyük çip alanı gerektirmeden yüksek
örnekleme hızlarına çıkabilen ADD tasarımlarına izin vermektedir. Mevcut akım
modlu ADDler, düşük gerilim seviyelerinde çalışsada yeni çalışmalar yapılarak bu
seviye daha aşağıya çekilmektedir. Yüksek hızlara ulaşabilmek için düşük kazançlı
devreler yeterli olmaktadır (Nairn ve diğ., 1989).
4.2. Akım Modlu Paralel ADD Yapısı
Paralel Modlu ADDler, analog işaretin sayısal işarete dönüştürülmesinde kullanılan
en hızlı yöntemdir. Analog işaret aynı anda tüm karşılaştırıcılara uygulanır ve elde
edilen termometre kodu öncelikli kodlayıcıya uygulanarak sayısal veri elde edilir. Bu
işlemlerin hızını etkileyen iki faktör vardır: karşılaştırıcıların gecikmesi ve lojik
yapıdan kaynaklanan gecikme.
Bir önceki bölümde, paralel ADDler ayrıntılı biçimde ele alınmıştır. Bu bölümde ve
bundan sonraki bölümlerde ,bir önceki altbaşlıkta anlatılanlar dikkate alınarak,
44
paralel ADDlere akım modlu yaklaşım ele alınacaktır. Şekil 4.1’de n bitlik akım
modlu paralel ADD yapısı bloklar halinde görülmektedir.
Şekil 4.1: N-bitlik akım modlu paralel ADDnin bloklar ile ifadesi
Analog işaretin sayısal işarete çevrilme işlemi şu şekilde yapılır:
• Giriş işareti (Igiriş) ilk olarak Ö/T ,örnekleme-tutma, bloğuna uygulanır. Bu
bloğun
görevi
işaretin
çevrim
sonuna
kadar
değişmeden
kalmasını
sağlamaktır. Örnekleme-tutma devresinden geçirilerek elde edilen tutulmuş
giriş akımı akım aynalarından oluşan akım kopyalama devreleri ile 2N-1 kez
kopyalanarak, 2N-1 adet akım karşılaştırıcının girişlerinden birisi olmak için
hazır hale getirilir.
• Akım karşılaştırıcılara girilecek olan referans akımları, aralarındaki ILSB
kuantalama aralığı aşağıdaki şekilde elde edilir.
I LSB =
I max − I min
2N −1
(4.1)
En düşük anlamlı bitin bulunabilmesi için gerekli olan referans akımına eşittir.
Bu anlatılanlar ışığında, referans akımlarının değerleri aşağıdaki formül ile
hesaplanmaktadır.
45
(
)
Ireferans m = 2 N +1 − (2m + 1) I LSB /2
m = 1,2,....,2 N - 1
(4.2)
Bu ifadede, N bit sayısını, m ise ilgili karşılaştırıcının numarasını temsil
etmektedir.
• Referans akımları ve örneklenip tutulmuş giriş işareti 2N-1 adet akım
karşılaştırıcıya uygulanır. Giriş işareti, akım karşılaştırıcıya uygulanan referans
akımından büyük ise akım karşılaştırıcının çıkışı lojik “1” seviyesine çekilir.
Eğer giriş işareti daha küçük ise çıkış lojik ”0” seviyesine çekilir. Gerilim modlu
paralel ADDlere benzer şekilde, karşılaştırıcı çıkışlarında termometre kodu
elde edilir.
• Elde edilen termometre kodu, 2N-N bitlik öncelikli kodlayıcıdan geçirilerek N
bitlik dijital çıkış elde edilir.
Şekil 4.1’den de görülebileceği gibi paralel modlu ADDde dört temel yapı
bulunmaktadır:
Örnekleme
tutma
devresi,
akım
kopyalama
devresi,
akım
N
karşılaştırıcı ve 2 -N öncelikli kodlama devresi. Bu bölümde, bu yapılar hakkında
genel bilgiler verilecektir.
4.3. Akım Modlu Paralel ADDde Kullanılan Yapı Blokları
Akım modlu paralel ADD devresinde kullanılacak yapı blokları, akım aynaları, akım
modlu örnekleme ve tutma devreleri , akım karşılaştırıcılar, ve öncelikli kodlayıcılar,
bu bölümde incelenecektir.
4.3.1. Akım Modlu Örnekleme ve Tutma Devreleri
Örnekleme ve tutma devreleri, analog dijital dönüştürücülerde önemli bir yere
sahiptir. Örneğin: iki basamaklı analog dijital dönüştürücülerde kaba (coarse)
dönüştürme yapıldıktan sonra incelikli (fine) dönüştürme işlemi yapılır. İncelikli
dönüştürme işleminde, kaba dönüşüm sonucunda elde edilen yüksek anlamlı bitler
bir dijital analog dönüştürücü yardımıyla analog işarete çevrilip, giriş işaretinden
çıkarılır. Yeni elde edilen işaret tekrar bir analog sayısal dönüştürcü yardımıyla
sayısal veriye dönüştürülerek düşük anlamlı bitler elde edilir ve çevirme işlemi
sonuçlanır. Görüleceği gibi bu işlemler sırasında giriş işareti, çevrim sonuna kadar
sabit tutularak ,zamanla değişmesi engellenerek, çevrim sırasında veri kayıpları
engellenir.
Şekil 4.2 (a) ve (b)’de literatürde bulunan iki farklı örnekleme tutma devresi
görülmektedir. Bu iki devrenin çalışma prensibi aşağıda açıklanmıştır:
46
Şekil 4.2a: S1 anahtarı kapalı olduğu süre boyunca MN2 tranzistörü, diyot bağlı
MN1 tranzistörü ile aynı akımı akıtır. Anahtar açılana kadar geçen sürede Chold
kapasitesi çıkış tranzistörünün akımını giriş akımına eşit yapacak şekilde yüklenir.
Anahtar açıldığında ise kapasitöründeki yükün karesi ile orantılı sabit bir akım MN2
üzerinden akar.
(a)
(b)
Şekil 4.2: (a) Basit Akım aynası temelli örnekleme tutma devresi (b) Dinamik akım
aynası temelli örnekleme tutma devresi
Şekil 4.2b: S1 ve S3 anahtarları aynı anda kapatılarak MN1 ranzistörü diyot bağlı
durumda giriş akımını akıtır. Anahtar açılana kadar geçen sürede Chold kapasitesi
çıkış tranzistörünün akımını giriş akımına eşit yapacak şekilde yüklenir. S1 ve S3
anahtarları açıldıktan sonra S2 anahtarı kapatılır. Bunun sonucu olarak, MN1
tranzistörü kapatılan anahtar açılana kadar akım aynasının çıkış tranzistörü gibi
davranır ve kapasitörde depolanmış yükün karesi ile orantılı sabit akımı üzerinden
akıtır.
Bu iki devre topolojisinin birbirine göre avantajları ve dez-avantajları; bunun yanı sıra
iki yapıda da görülen ortak performans sınırlamaları bulunmaktadır. Bu iki devrenin
karşılaştırması aşağıda kısaca yapılmıştır:
•
Şekil 4.2(a)’daki devrede iki adet eş olması gereken NMOS tranzistör
kullanılmaktadır. Buna karşılık, üretim sırasında oluşabilecek eleman
parametrelerindeki uyuşmazlık, bu iki tranzistordan, eşit geçit gerilimleri için,
eşit akımların akmasını engeller. Şekil 4.2(b)’deki devre yapısında ise
örnekleme ve tutma işlemi için iki adet tranzistör yerine bir adet tranzistör
kullanılarak parametre uyuşmazlığı sorunu ortadan kaldırılmıştır (Fiez ve
diğ., 1991).
47
•
Şekil 4.2(b)’deki devrede üç adet, Şekil 4.2(a)’daki devrede ise bir adet
anahtar kullanılmıştır. Bunun sonucu olarak; anahtarlama sırasında
anahtarların açılması ile serbest kalan yüklerin –anahtar olarak kullanılan
MOS tranzistorların parazitik kapasitelerin neden olduğu hata- ortaya
çıkardığı hata (clock feed-through error)
Şekil 4.2(b)’deki devrede daha
belirgin olur (Sugimoto, 2004).
Bu tezde, yukarıdaki açıklamalar dikkate alınarak, tasarlanmış olan analog dijital
dönüştürücüde kullanılacak örnekleme ve tutma devresi Şekil 4.(2)a’daki devre
topolojisi üzerine kurulmuştur. Bu nedenle, bu tezin geri kalan bölümlerinde
örnekleme ve tutma devreleri üzerinde durulurken Şekil 4.2(a)’daki devre ve
geliştirilmiş şekilleri söz konusu olacaktır.
Örnekleme ve tutma devrelerinin performansını sınırlayan bir çok etken vardır.
Bunlar:
•
Tranzistör parametrelerinin eşlenik yapılamaması: Eşik gerilimleri (VT) ve
tranzistor kazançlarındaki (β) farklılıklar akım oranlarında farklılıklara ve
lineersizliğe neden olur. Geniş alanlı tranzistörler veya yüksek doyma
gerilimli tranzistörler kullanılarak bu etkiler azaltılabilir. (Toumazou ve diğ ,
1990, Hughes ve diğ., 1989) Bunların dışında tranzistörlerin kaynak ucu ile
referans arasına birer direnç bağlanarak
bu iki tranzistörün β ve VT
farklılıklarından kaynaklanan uyumsuzluk bastırılabilir. Bu direnç ile aynı
etkiyi yapabilecek bir yöntem ise uzun kanallı tranzistör kullanımıdır. Uzun
kanallı tranzistorların ise devrenin frekans cevabını etkileyeceği açıktır. Bu
nedenle, uzun kanallı bir tranzistor yerine birbirine seri bağlı kanal boyları
daha kısa iki tranzistör kullanılanılır ve alttaki tranzistorun geçidi üsttekine
göre daha pozitif tutulurak direnç etkisi göstermesi sağlanır (Sugimoto,
2004).
•
Anahtar olarak kullanılan MOS tranzistörlerin yükleme etkisi: Anahtar
açıldığı zaman tranzistör parazitik kapasitelerinde depolanmış yükler
serbest kalır ve bu yükler tutma kapasitesine eklenerek ∆V=∆q/C kadar
geçit gerilimini arttırır. Bu gerilim ise; karesi ile orantılı olarak savak akımını
arttırır. Bu etkileri azaltmak için anahtar olarak kullanılan MOS tanzistörün
WL alanı azaltılır veya tutma kapasitesinin değeri arttırılır. Bu durum ise
örnekleme tutma devresinin hızını azaltır. Devrenin hızını arttırmak için
anahtarlama frekansı arttırılırsa, yükleme etkisinden oluşan hata daha da
artar. (Toumazou ve diğ., 1990) Bu yükleme etkisini azaltmak için pek çok
48
çalışma yapılmıştır (Hu ve Martin , 1997, Hughes ve Moulding, 1993,
Sugimoto ve Imai , 1999, Worapishet ve diğ., 2000).
•
Yüksek doğruluklu devreler gözönüne alındığında, devre performansını
sınırlayan etkenlerden biri de MOS tranzistorun çıkış direncinin sınırlı
olmasından kaynaklanır. Giriş-çıkış akımlarını birbirlerine yaklaştırmak için
yapılması gereken çıkış tranzistörünün empedansını arttırmak veya giriş
tranzistörünün geçiş iletkenliğini azaltmaktır. Çıkış direncinden kaynaklanan
etkileri azaltmak için pekçok yöntem önerilmiştir (Hu ve Martin 1997, Nairn
1996, Toumazou ve diğ., 1990, Sugimoto ve Imai 1999).
Çıkış direncini arttırmak için kullanılan akım aynası topolojilerinden birisi de regüleli
kaskod akım aynasıdır (Şekil 4.3). Bu yapı ile çıkış gerilimindeki değişimlerin VdsMN4
üzerindeki etki yaklaşık olarak gmMN5rDSMN5 gmMN6rDSMN6 defa azaltılmıştır (Toumazou
ve diğ., 1990).
Şekil 4.3: Regüleli kaskod akım aynası ile oluştrulmuş örnekleme tutma devresi.
Bu tezde kullanılmış olan örnekleme ve tutma devresinde akım aynası görevini
regüleli kaskod yapı üstlenmiştir. Anahtarlamadan dolayı oluşacak hatayı azaltmak
için kullanılmış olan yöntem gelecek bölümde ayrıntılı olarak incelenecektir.
4.3.2. Akım Aynaları
Tasarlanan ADDnin performansını etkileyen yapı bloklarından birisi akım aynalarıdır.
Akım aynaları, akım transfer oranı ve hız bakımından incelenmeli ve elde edilen
49
sonuca göre sistem için en uygun yapı seçilmelidir. Bu amaç doğrultusunda gelecek
üç alt bölüm içerisinde sırasıyla basit akım aynası, kaskod akım aynası ve aktif akım
aynası incelenecektir. Elde edilen sonuçlar dikkate alınarak bu türlerin içinde sistem
için en uygun görülen yapı kararlaştırılıp seçilecektir.
4.3.2.1. Basit Akım Aynası
Şekil 4.4’ de basit akım aynası şeması görülmektedir. Tranzistorların µ, Cox ve Vth
değerlerinin eş olduğu varsayıldığında devrenin kollarından akan akımlar arasındaki
ilişki şu şekilde formule edilebilir.
W2
(1 + λ2VDS2 )
L2
I 2 = IS .
W1
(1 + λ1VDS1 )
L1
(4.3)
W2/L2 ve W1/L1 ilgili tranzistorların kanal genişliklerinin kanal boylarına oranını, VDS2
ve VDS1 ilgili tranzistorların savak-kaynak arasındaki potansiyel farkı ve son olarak λ2
ve λ1 ilgili tranzistorların kanal boyu modulasyon katsayısını temsil etmektedir.
Şekil: 4.4 Basit akım aynası
Akım kaynağının akım değerinin eşleniğini çıkış tranzistorundan akıtabilmek için
tranzistorlar eşlenik
ve VDS değerlerinin eş olması sağlanmalıdır. Bu durum
sağlanamazsa kanal boyu modülasyonu etkisi yüzünden çıkış kolundan akan DC
akım, giriş akımını takip etmeyecektir.
Şekil 4.5’ de, Şekil 4.4’ deki devrenin küçük işaret eşleniği görülmektedir. IS ,ideal
olmayan, akım kaynağının iç direnci rS ile buna paralel bağlı M1 tranzistorunun giriş
direncini sürmektedir. Bu durumda şu bağıntı elde edilir:
50
iS
=
i1
rS +
1
g m1
(4.4)
rS
Görüldüğü üzere, transfer edilmesi gereken akım, M1 tanzistorunun geçiş
iletkenliğinin sonsuz olmamasından dolayı bölünmektedir.
Şekil 4.5: İdeal olmayan Is akım kaynağı ile sürülen basit akım aynasının küçük
işaret eşdeğer devresi
Girişten çıkışa küçük işaret akım transfer fonksiyonunu bulmak için, bu aşamaya
kadar kullanılan NMOS akım aynasının bir PMOS akım aynasını sürdüğü
varsayılacaktır. Bu durumda giriş ile çıkış arasındaki bağıntı aşağıdaki gibi
yazılabilir:
iÇ
iG
=
rS
rS +
rN
1
g mN
rN +
1
(4.5)
g mP
gmN ve gmP sırasıyla NMOS ve PMOS tranzistorların geçiş iletkenliğini, rS ve rN ise
sırasıyla akım kaynağı ve NMOS tranzistorun çıkış direncini temsil etmektedir. Çıkış
ve giriş akımları arasındaki oranın birim değerli veya birim değere yakın olabilmesi
için çıkış dirençlerinin veya geçiş iletkenliklerinin arttırılması gerekmektedir.
Akım aynalarının yüksek frekanslardaki
davranışı ve hızı, kullanılacağı ADDnin
çevrim oranını etkileyeceği için ayrıca incelenmesi gerekir. Basit akım aynasının
baskın kutbu aşağıdaki formül ile hesaplanır:
fP =
g m1
2π (CGS1 + CGS2 + CDS1 )
(4.6)
gm1 değerinin küçük olması nedeniyle bu kutup yetrerince yüksek frekanslara
ötelenmiştir. Bu nedenle devre yüksek frekanslarda düzgün çalışabilir (Kaya, 2002).
Basit akım aynasının
frekans bölgesindeki ve zaman bölgesindeki davranışları
Pspice simulasyon programı kullanılarak analiz edilmiştir. Tranzistor boyutları
51
W=2µm, L=0.5µm, besleme gerilimi VDD=5V, çıkış gerilimi Vo=5V olarak
ayarlanmıştır. Simulasyon sonuçları, Şekil 4.6 ve Şekil 4.7’de gösterilmiştir.
Zaman
DB(Içıkış/Igiriş)
Şekil 4.6: Basit akım aynasının zaman bölgesindeki davranışı
Frekans
Şekil 4.7: Basit akım aynasının frekans bölgesindeki davranışı
4.3.2.2. Kaskod Akım Aynası
Basit akım aynasının çıkış direncinin sınırlı olmasından dolayı, giriş akımı ve çıkış
akımları arasında eşlenik olamama problemi söz konusu olur. Eğer çıkış direnci
arttırılırsa çıkış akımının giriş akımını takip etmesi kolaylaşır. Bu sorunun üstesinden
gelmek için kanal boyu daha büyük tranzistorlar kullanılabilir; ama bu durum
52
devrenin frekans cevabını kötüleştirir. Frekans cevabını kötüleştirmeden, iki koldan
akan akım değelerini birbirine yaklaştırmak, kaskod akım aynalarının kullanılmasıyla
sağlanır.
Şekil 4.8’ de kaskod akım aynası şeması görülmektedir. Basit akım
aynasına göre devrenin çıkış direnci yaklaşık gM2rO2 kat iyileştirilmiştir. Bunun yanı
sıra kanal boyu modülasyon etkisi azaltılmıştır. Buna karşılık devrenin çıkış sinyal
salınımı azalmıştır. Şekil 4.8’ de görülen tüm tranzistorların eşlenik olduğu
varsayıldığında, diğer bir deyişle VGS değerleri eşit olduğu kabulü altında MN2
tranzistorunun geçit gerilimi referansa göre 2VGS daha yüksek potansiyelde olur. Bu
durumda M2 tranzistorunun doymada kalabilmesi için aşağıdaki şart sağlanmalıdır.
VOmin ≈ 2VGS −VT ≈ 2VDSsat + VT
Şekil 4.8: Kaskod akım aynası
Zaman
Şekil 4.9: Kaskod akım aynasının zaman bölgesindeki davranışı
53
(4.7)
Kaskod akım aynasının
frekans bölgesinde ve zaman bölgesindeki davranışları
Pspice simulasyon programı kullanılarak analiz edilmiştir. Tranzistor boyutları
W=2µm, L=0.5µm, besleme gerilimi VDD=5V, çıkış gerilimi Vo=5V olarak
DB(Içıkış/Igiriş)
ayarlanmıştır. Simulasyon sonuçları, Şekil 4.6 ve Şekil 4.7’de gösterilmiştir.
Frekans
Şekil 4.10: Kaskod akım aynasının frekans bölgesindeki davranışı
4.3.2.3. Aktif Akım Aynası
Şekil 4.11: Aktif akım aynası
Şekil 4.11’ de aktif akım aynası yapısı görülmektedir. Bu yapı ile, akım aynasının
giriş gerilimi sabit tutularak bir önceki katın yüklenmesi engellenir (Serrano ve
Barranco, 1994). VGS gerilimi, VDS geriliminden bağımsız tutulduğu için, diğer bir
deyişle VDS gerilimi sabit tutulduğu için –negatif geri beslemeden dolayı- giriş direnci
işlemsel kuvvetlendiricinin kazanç miktarı “A” kadar azalır. Buna bağlı olarak giriş ve
çıkış küçük işaret akımları arasındaki bağıntı aşağıda gösterilmiştir.
54
iÇ
iG
=
rS
rN
(4.8)
1
1
rN +
rS +
Ag mP
Ag mN
Bu devre yapısı kullanılarak giriş-çıkış akımları arasındaki uyuşmazlık çok düşük
seviyelere çekilir; ama büyük işaret uygulamaları gözönüne alındığında, kullanılan
işlemsel kuvvetlendiricinin offset değeri belirgin hatalara yol açar. Bunun yanısıra
kullanılan işlemsel kuvvetlendiricinin kazanç-band genişliğinin sınırlı olmasından
dolayı devrenin yüksek frekanslardaki performansı düşecektir.
Bu sorunun
üstesinden gelmek için özel yapılı işlemsel kuvvetlendiriciler ,”folding cascode”
kullanılabilir; ama bu yapılar devre alanını sınırlamanın yanısıra devrenin güç
harcamasını da arttırırlar.
4.3.2.4. Tasarlanacak ADDde Kullanılacak Akım Aynasının Belirlenmesi
Bundan önceki üç altbaşlıkta üç tür akım aynası üzerinde durulmuştur. Bunlardan
ilki olan basit akım aynasının frekans cevabının yeterli olmasına karşılık giriş-çıkış
akımları arasındaki uyuşmazlık yüksektir. İkinci olarak üzerinde durulan kaskod
akım aynasının frekans cevabı ve giriş-çıkış akımları arasındaki uyumun iyi
olmasına karşılık çıkış işaret salınım aralığı düşüktür. Son olarak üzerinde durulan
aktif akım aynasının giriş-çıkış akımları arasındaki uyumun yüksek olmasına karşılık
frekans cevabı diğerlerine göre kötüdür. Tüm bu avantajlar ve dezavantajlar
gözönüne alındığında kaskod akım aynası, tasarlanacak ADDde kullanılmaya en
uygun yapı olarak görülmektedir.
4.3.3. Akım Karşılaştırıcılar
Akım modlu veya gerilim modlu ADD devre yapısında vazgeçilmez olarak kullanılan
ortak yapı bloklarından birisi de karşılaştırıcı devrelerdir. Bu blok yardımıyla elde
edilecek karşılaştırma bilgisi, ilgili bitin değerinin lojik “1” ya da lojik “0” seviye olup
olmayacağı doğrudan ya da dolaylı olarak belirlenir. Günümüzde kullanılan sayısal
devre yapılarının çoğu gerilim modlu olduğu için; kullanılan karşılaştırma
devrelerinin çıkışları büyük çoğunlukla gerilim modlu olmaktadır. Bu bağlamda,
kullanılan akım modlu karşılaştırma devreleri geçiş empedansı kuvvetlendiricisi
olarak anılır.
4.3.3.1. Basit Akım Karşılaştırıcılar
Şekil 4.12’de CMOS evirici yapıların kaskad bağlanması ile elde edilmiş basit akım
karşılaştırıcı devresi görülmektedir. İlk evirici, geçiş empedansı kuvvetlendircisi
55
olarak çalışır. Giriş işareti Igiriş=I1-I2 , I1 ve I2 birbirleri ile karşılaştırılacak akımları
temsil etmektedir, giriş kapasitesi Cgs’ yi doldurarak ya da boşaltarak karşılaştırma
işleminin gerçekleşmasini sağlar.
Şekil 4.12: CMOS evirici temelli basit akım karşılaştırıcı yapısı
Şekil 4.13: Giriş empedansı azaltılmış CMOS evirici temelli basit akım karşılaştırıcı
yapısı
Bu devrenin frekans cevabı, yüksek empedanslı giriş düğümü nedeniyle küçük
genlikli işaretler için düşmektedir. Bu sorunun üstesinden gelebilmek için Şekil
4.13’de görülen yapı kurulmuştur. Eklenen M1 ve M2 numaralı tranzistorların geçit
56
ve savakları birbirlerine kısa devre edilerek değerleri 1/gm olan birer direnç gibi
davranmaları sağlanmıştır. Devrenin giriş empedansı bir hayli azaltılmış ve hızı da
buna bağlı olarak artmıştır (Wu ve Liow, 2000).
Şekil 4.13: Giriş empedansı azaltılmış CMOS evirici temelli basit akım karşılaştırıcı
yapısı
Şekil 4.14: Pozitif geribeslemeli basit akım karşılaştırıcı
Bir diğer basit akım karşılaştırıcı devresi Şekil 4.13’de gösterilmiştir. Bu karşılaştırıcı
devre pozitif geribeslemeye dayanmaktadır. Pozitif geribesleme yüksek hızlı
57
karşılaştırıcılarda sıkça kullanılmakta ve hız-güç kullanımı arasındaki ilişkiyi
düzenlemektedir (Cable and Harjani, 1994). Bunun yanısıra pozitif geri besleme
kullanılarak devrenin giriş empedansı düşürülerek devrenin frekans cevabı biraz
daha iyileştirilmiştir. Bu devrede de bir önceki basit yapıda karşılaşılan küçük genlikli
işaretler için devrenin yüksek giriş empedansı göstermesi sorunu gözlenmektedir.
Bu sorunun üstesinden gelebilmek için akım kaynakları kullanılarak kutuplama, diyot
bağlı NMOS ve PMOS tranzistorların yapıya eklenmesi gibi çalışmalar yapılmıştır
(Tang ve Toumazou 1994, Ravezzi ve diğ., 1997, Chen ve diğ., 2000, Lin ve diğ,
2000).
4.3.3.2. Resetlemeye ve Tekrar Oluşturmaya Dayalı Akım Karşılaştırıcılar
Bir önceki alt başlıkta anlatılan basit akım karşılaştırıcılarda görülen en büyük
problem küçük genlikli değişken akım değerlerinin karşılaştırıcı tarafından
algılanamaması ve bu nedenle de bu değerlerde frekans cevabının kötü olmasıdır.
Örnek olarak iki CMOS eviriciye dayalı topolojiyi ele aldığımızda, yüksek akım
değeri ile giriş kapasitesi doldurulup çıkış lojik”1” seviyeye çekildikten sonra bir
öncekine göre çok küçük değerli bir akım çekilirse çıkış beklenildiği gibi lojik”0”
seviyeye düşmemektedir. Bunun nedeni: çekilen akımın genliğinin giriş kapasitesini
boşaltmak için yeterince zamanı olmaması olarak açıklanabilir. Görüldüğü gibi
mutlak değer seviyeleri birbirinden çok farklı ve zıt işaretli giriş akımlarında devrenin
frekans cevabı dinamik performansı kötü yönde etkilemektedir.
Şekil 4.15: Resetlemeye ve tekrar oluşturmaya dayalı akım karşılaştırıcı örneği
58
Bu sorunlar gözönüne alınarak, çıkış düğümündeki gerilim değeri lojik “1” ya da “0”
değerine çekildikten sonra depolanıp, bu düğüm ortak işaret seviyesine çekilebilirse
bir sonraki karşılaştırma sırasında akım farklarından doğabilecek gecikmeler
engellenebilir. Dolayısıyla karşılaştırıcının dinamik performansı artar. Bu sisteme
dayalı pek çok devre topolojisi gerçekleştirilmiştir (Roientan Lahiji ve Rezvan 2000,
Yin ve diğ., 1992, Gregorian, 1999, Cable ve Harjani, 1994, Guo ve diğ. 2001).
Şekil 4.15’de giriş darbeleri birbiriyle örtüşmeyecek fi1 ve fi2 anahtarları kullanılarak
resetlemeye ve tekrar oluşturmaya dayalı karşılaştırıcı devre örneği görülmektedir.
Devrenin çalışma prensibi kısaca şöyledir. fi1 fazında devre girişlerine bağlı olarak
çıkışlarından birisi lojik “1”, diğeri ise lojik “0” seviyeye çekilmektedir. Bu fazın
sonunda darbeler arasında ölü zaman bırakılarak anahtar olan tranzistorların aynı
anda iletime geçmesi engellenir. fi2 fazında ise çıkış düğümündeki bilgi S-R
devresine girilerek saklanır ve bu düğümdeki değer ortak işaret seviyesine çekilerek
bir sonraki karşılaştırma için hazır olur.
Bu devrenin çalışma hızı anahtarlama frekansına bağımlıdır. Anahtarlama hız ne
kadar arttırılırsa devrenin hızı da aynı oranda arttırılabilmektedir. Buna karşılık iki
farklı
saat
darbesinin
sürdüğü
anahtarlar
aynı
anda
iletimde
olmaması
gerekmektedir. Bu nedenle çalışma hızını belirleyen etkenlerden birisi de bu ölü
zaman süresi olmaktadır.
4.3.4. Kodlayıcılar
Öncelikli kodlayıcı, paralel yapılı ADDlerde kullanılan karşılaştırıcıların çıkışında
elde edilen termometre kodunun ikilik sistem koduna çevrilmesinde kullanılacaktır.
Bu bölümde ilk olarak kodlayıcılar hakkında ön bilgi verilecek,
daha sonra da
öncelikli kodlayıcılardan bahsedilecektir.
4.3.4.1. Kodlayıcı
Sayısal sistemlerde, ayrık bilgiler ikilik sistem kodları ile temsil edilirler. Kodlayıcı, 2N
veya daha az elemanlı girişi N bitlik ikilik sistem koduna çeviren lojik sistemdir.
Örnek olarak dörde-ikilik çevirici ele alınabilir. Bu çevircinin dört adet girişine karşılık
2 bitlik çıkışı vardır. Tablo 4.1’de bu kodlayıcının doğruluk tablosu görülmektedir.
Girişlerin kodlanma işleminin doğru yapılabilmesi için her kodlama anında,
girişlerden yalnız ama yalnız bir tanesi lojik “1” seviyede olması gerekir. Aksi halde
çıkış tanımsız olur (Mano, 1991). Bu tanımsızlığı ortadan kaldırıp yalnızca bir girişin
kodlanmasını sağlamak için öncelik belirlenmelidir.
59
Tablo 4.1: Dörde-ikilik çevirici için doğruluk tablosu
4.3.4.2. Öncelikli Kodlayıcı
Öncelikli kodlayıcı, öncelik fonksiyonunu içinde barındıran kodlayıcı türüdür.
Örneğin, girişlerinden aynı anda birden fazlası lojik “1” seviyesinde ise önceliği en
yüksek giriş seçilerek kodlama işlemi yapılır. Tablo 4.2’de dört girişli öncelikli
kodlayıcının doğruluk tablosu görülmektedir. “X” işaretleri lojik “1” ya da lojik “0”
seviyeli olabilir; ama önceliği düşük olduğu için işleme konulmaz.
Tablo 4.2: Dört girişli öncelikli kodlayıcı için doğruluk tablosu
60
5. TASARLANAN AKIM MODLU PARALEL ADD YAPISI
Bu bölümde, önceki bölümde verilmiş olan bilgiler ışığında tasarlanan paralel modlu
ADD yapı blokları - örnekleme tutma devresi, akım aynaları ile oluşturulan fark alma
devresi, akım karşılaştırma devresi ve öncelikli kodlayıcı devresi- üzerinde
durulacaktır.
5.1. Akım Modlu Örnekleme ve Tutma Devresi
Bölüm 4’te, iki çeşit örnekleme tutma devresi üzerinde durulmuştu. Birincisi, üç adet
anahtar ve tek bir tranzistorun bir fazda diyot bağlı giriş yapısı ve diğer fazda çıkış
tranzistoru olarak görev yaptığı, ikincisi ise tek bir anahtar ve geleneksel akım
aynasına dayanan örnekleme ve tutma devresidir. Bu tezde ikinci olarak belirtilen ,
geleneksel akım aynası topolojisine dayanan yapı kullanılmıştır.
Şekil 5.1’de kullanılan örnekleme tutma devresi gösterilmiştir. Devrede I1, I2, I5,
MN1-MN6, Chold, S1 ile oluşturulmuş olan yapı –ana yapı olarak adlandırılacaktırile I3, I4, I6, MN7-MN12, Chold2, S2 oluşturulmuş yapı –yardımcı yapı- birebir
aynıdır. Buna benzer devre topolojilerinin birçok örneği bulunmaktadır. (Sugimoto ve
Imai, 1999, Fiez ve diğ., 1991) Yardımcı yapı , ana yapıdan farklı olarak giriş
işaretini içermemektedir. Yardımcı yapının görevi I6 isimli kutuplama akım
kaynağının tutma sırasında ortaya çıkaracağı yük hatasını elde etmektir. Bu sayede,
ana yapıda anahtar olarak kullanılan tranzistorun parazitik kapasitelerinden
kaynaklanacak yükleme etkisi azaltılacaktır.
Devrenin çalışma prensibi şu şekilde açıklanabilir:
•
Anahtar olarak kullanılan S1 anahtarı kapandığı zaman giriş akımı ve
kutuplama akımı (I5), MN4 tranzistoru üzerinden akmaya başlar. Aynı
şekilde, S1 ile eş zamanlı olarak kapanan S2 anahtarı sayesinde I6
kutuplama akımı MN7 tranzistoru üzerinden akar.
Bu sırada da Chold1
kapasitesi, MN4 akımı, Chold2 kapasitesi ise MN7 tranzistoru üzerinden
akan akımın karakökü ile ters orantılı olarak dolmaya başlar. Daha önceki
bölümde de üzerinde durulduğu gibi, bu kapasitelerin gereğinden büyük
seçilmesi
durumunda,
örnekleme
61
ve
tutma
devresinin
dinamik
performansında belirgin bir düşme sözkonusu olmaktadır (Toumazou ve diğ.,
1990). MN7 tranzistoru üzerinden akan akım bir PMOS kaskod akım aynası
ile MN4 tranzistoru üzerine yönlendirilir. MN4 ve MN7 tranzistorlarının
arasındaki akım farkı çıkış işaretini oluşturmaktadır.
•
Anahtarlar açıldığı zaman, bir önceki fazdaki gibi MN7 ve MN4 tranzistor
akımları arasındaki fark alınmaya devam edilir. İki faz arasındaki farklılık ise,
ikinci
fazda
tutulmuş
anahtarlamadan
işaretlerin
kaynaklanan
farkları
hatayı
alınır.
bünyelerinde
Tutulmuş
işaretler,
barındırdıkları
için
birbirlerinden çıkarıldıklarında hata işaretleri büyük ölçüde birbirlerini yok
ederler. Şekil 5-2’de örnekleme ve tutma devresinin girişinde verilen işarete
karşılık çıkışında elde edilen örneklenmiş ve tutulmuş işaret görülmektedir.
Şekil 5-1: Tasarlanan paralel analog dijital dönüştürücüde kullanılacak örnekleme ve
tutma devresi
Şekil 5-3’te yarıdmcı yapı kullanılmadığında yükleme etkisinin yaratacağı hata açık
bir şekilde görülmektedir. Şekil 5-4’ te ise yardımcı devrenin hatayı büyük ölçüde
ortadan kaldırdığı görülmektedir.
Akım aynasına dayalı örnekleme ve tutma devrelerinde girişi ve çıkışı arasında,
anahtar olarak kullanılan NMOS tranzistorun ideal olmayan iç direnci ve örnekleme
62
kapasitesinin oluşturduğu RC zaman sabitinin neden olduğu bir gecikme söz
konusudur (Sugimoto ve Imai, 1999). Bunun üstesinden gelmek için tutma
kapasitesi küçültülmeli veya anahtarın iç direnci azaltılmalıdır. Kapasiteyi küçültmek
veya NMOS tranzistorun kanal boyunu büyüterek iç direncini azaltmak ise, yük
hatasını arttıracaktır. Ana yapının yanında kullanılan yardımcı yapı nedeniyle, tutma
kapasitesini büyütme gereği duyulmamıştır (Chold=0.1pF). Sonuç olarak da RC
zanman sabitinden kaynaklanan gecikme 0.5ns ile sınırlandırılmıştır.
Zaman
Şekil 5-2: Rampa şeklindeki giriş işareti ve çıkışta elde edilen örneklenip tutulmuş
işaret
Zaman
Şekil 5-3: Anahtar olarak kullanılan MOS tranzistorun açıldığı zaman parazitik
kapasitelerinden serbest kalan yüklerin tutma anında neden olduğu hata
63
Zaman
Şekil 5-4: Yardımcı devre kullanıldığında elde edilen hata oranı oldukça düşürülmüş
çıkış işareti
5.2. Kaskod Akım Aynaları ile Oluşturulmuş Fark Alma Devresi
Şekil 5.5’ de ,fark alma devresi blok olarak görülmektedir. Devrenin birinci girişine I1
akımı, ikinci girişine ise I2 akımı uygulanmaktadır. Çıkışında ise bu iki akımın farkı
“I1-I2” ve “I2-I1” değerleri elde edilmektedir. Bu iki çıkış doğrudan akım
karşılaştırıcının ilgili giriş uçlarına uygulanmaktadır.
Şekil 5.5: Fark alma devresinin blok diyagram ile ifadesi
Fark alma devresini oluşturmak için akım aynalarından yararlanılmıştır. Basit akım
aynalarının giriş-çıkış akımlarındaki uyuşmazlık, aktif akım aynalarının frekans
cevabının kötü olması nedeniyle bu yapılar fark alma devresinde kullanılmamıştır.
Bunun yerine, frekans cevabı yeterince iyi ve giriş-çıkış akımları arasındaki hata
miktarı yeterince düşük olan kaskod akım aynalarından yararlanılmıştır. Her ne
kadar kaskod akım aynalarının çıkış işaret salınım aralığı düşük olsada, besleme
gerilimlerinin yeterince büyük olması nedeniyle bu etki dikkate alınmayacaktır.
64
Şekil 5.6’ da fark alma devresinin akım aynaları ile oluşturulmuş şekli görülmektedir.
I2 akımı MP4 ve MP9 tranzistorları üzerinden, I1 akımı MN1 ve MN6 tranzistorları
üzerinden aynalanarak birbirlerinden çıkarılmaktadır. “1” ve “2” nolu düğümlerden
birbirinin zıt işaretlisi olan çıkış akımları alınarak akım karşılaştırıcının ilgili uçlarına
uygulanmaktadır.
Şekil 5.6: Kaskod akım aynaları ile oluşturulmuş fark alma devresi
5.3. Akım Karşılaştırma Devresi
Bölüm 4’te ADD yapılarında kullanılabilecek birçok akım karşılaştırıcı örneği
verilmiştir.
Bu
karşılaştırıcılar
içinde
pozitif
geribesleme
kullanılarak
giriş
empedansları düşürülen yapıların dinamik performansı, diğerlerine göre belirgin
artış göstermektedir.
Giriş empedansının düşürülmesinden başka, üstesinden gelinmesi gereken bir
sorun daha vardır: Karar evresinden sonra çıkışlar lojik “1” ya da lojik “0” seviyeye
çekildiği için bir sonraki evrede farklı bir giriş işareti olduğunda çıkışın karar
vermesinin gecikmesidir. Çıkış seviyesi , karar evresinden sonra bir dahaki karar
evresinin başlangıcına kadar reset seviyesinde tutularak, çıkış kararsızlığı ortadan
kaldırılabilir.
65
Yukarıda anlatılanlar temel alınarak tasarlanan ADDde kullanılmış akım karşılaştırıcı
devresi Şekil 5.7’de görülmektedir. MNcomp1-MNcomp2 ve MPcomp1-MPcomp2
tranzistorları çapraz bağlanarak çıkıştan girişe pozitif geri besleme sağlanmıştır.
Devre iki evrede çalışmaktadır: resetleme evresi ve yeniden oluşturma evresi.
Yeniden oluşturma evresinde, yapı giriş işaretine göre çıkışlarını lojik seviyelere
götürürken, resetleme evresinde bu çıkış değerleri saklanıp bir dahaki karşılaştırma
için çıkışlar resetlenmektedir. Bu iki evre başlangıcı arasında 0.75ns olup geçişler
anahtar olarak kullanılan birer NMOS anahtar yardımıyla yapılmaktadır. Devrenin
çalışma prensibi şöyle açıklanabilir:
•
Yeniden oluşturma evresi:Girişlerden birisine iki akım farkı basılırken, diğer
girişten bu fark çekilir. Örneğin akım farkı “I2-I1” in pozitif olduğu varsayılırsa,
akan akım MNcomp2 tranzistorunun geçit gerilimini arttırırken savak
gerilimini
düşürecektir.
MNcomp2
tranzistorunun
savağı
MNcomp1
tranzistorunun geçidine kısa devre olduğu için bu tranzistorun geçit gerilimi
azalacaktır. Çapraz bağlı NMOS tranzistorlarda gözlenen bu olay, çapraz
bağlı PMOS tranzistorlarda da gözlenir. “I2-I1” akımı devreden içeri
basılmaya başlandığında MPcomp2 tranzistorunun geçidindeki gerilim değeri
artarken, savağındaki gerilim azalır. Bu tranzistorun savağı, MPcomp1’in
geçidine kısa devre olduğu için MPcomp1’in savak gerilimi artar. Bu pozitif
geribeslemeli sistem, çıkışlardan birisi pozitif besleme gerilimine, diğeri ise
negatif besleme gerilimine ulaşana kadar sürer.
•
Resetleme evresi: İkinci evrede, ilk evrede elde edilen çıkış değerleri
saklanmalı ve çıkış seviyesi “0” V gerilim değerine getirilerek bir dahaki
çevrime hazır hale getirilmelidir. Çıkışları saklama işlemi için CMOS yapılı Dlatch kullanılmaktadır. Şekil 5.8’de bu yapı görülmektedir. Bu devrede dikkat
edilmesi gereken bir nokta metastabilite problemine yol açmamaktır.
Saklama işlemi için anahtarlama yapılmadan önce devrenin saklanacak
veriyi algılayacak kadar yeterli süresinin olması gerekir (Kang ve Leblebici,
1999).
Şekil 5.9 (a)’da I1 (min=49.9µA, max=50.1µA) ve I2 (=50µA) akımları görülmektedir.
Bu akımların farkı “I1-I2” (=±100nA) devrenin girişlerine uygulanmaktadır. Şekil
5.9(b)’de bu girişler uygulandığında yeniden oluşturma ve resetleme evreleri, Şekil
5.9 (c)’ de ise D- latch çıkışında elde edilmiş çıkış görülmektedir.
Bu analizler
sonuncunda, devrenin çok düşük akım farklarını hızlı bir şekilde algılayıp çıkışa
verebildiği sonucu çıkarılmaktadır. Bu özelliği nedeniyle, akım modlu paralel ADD ler
için gerekli olan hızlı ve kararlı karşılaştırıcı özelliği taşıdığını göstermektedir.
66
Devrenin hızı anahtarlama frekansı ile orantılıdır. Hızı arttırmak için anahtar
frekansını yükseltmek gerekir.
Şekil 5.7: Tasarlanan ADDde kullanılan akım karşılaştırıcı devresi
Şekil 5.8: CMOS yapılı D-latch devresi
67
Devrenin başka ikinci
çıkışı olduğu not edilmelidir.
Bu çıkış, diğerinin evrilmiş
şeklidir ve öncelikli kodlayıcı girişinde kullanılacaktır.
Zaman
Şekil 5.9: Akım karşılaştırıcının tepe değeri 100nA olan kare dalgaya verdiği cevap
5.4. Öncelikli Kodlayıcı
Paralel ADDlerin çıkışında elde edilen termometre kodunun, ikilik sistem koduna
çevirmek için öncelikli kodlayıcı kullanmak gerekmektedir. Elde edilen termometre
kodunun LSBden başlayarak daha anlamlı bitlere giderken, kuvvetlendirici
çıkışlarından ilk lojik “0” değeriyle karşılaşmadan bir önceki lojik “1” seviyesi öncelikli
kodlayıcının çıkışındaki ikilik sistem kodunu belirler.
Tasarlanan paralel ADD çıkışında elde edilen 8-bitlik termometre kodunun ikilik
sistem koduna çevrilmesinde MC14532B öncelikli kodlayıcı entegre devresinden
yararlanılmıştır
(ON
Semi).
Tablo
5.1’de
bu
devrenin
doğruluk
tablosu
görülmektedir.
Şekil 5.10’da ise bu devrenin lojik diyagramı görülmektedir. Bu
diyagramın oluşturulmasında kullanılan lojik denklemler aşağıda belirtilmiştir:
E out = E in • D0' •D1' •D2' •D3' •D4' •D5' •D6' •D7'
(5.1)
Q0 = E in • (D1 • D2' •D4' •D6' +D3 • D4' •D6' +D5 • D6' +D7 )
(5.2)
Q1 = E in • (D2 • D4' •D5' +D3 • D4' •D5' +D6 + D7 )
(5.3)
Q2 = E in • (D4 + D5 + D6 + D7 )
(5.4)
68
GS = E in • (D0 + D + D2 + D3 + D4 + D5 + D6 + D7 )
(5.5)
Tasarlanan ADDden 3 bitlik çıkış elde edileceği için Q0, Q1 ve Q2 uçlarının eldesi
yeterli
olacaktır.
GS
(group
select)
ve
Eout
(enable
output)
çıkışları
kullanılmayacaktır. Ein (enable input) girişinin de her zaman için lojik “1” seviyesinde
olduğu varsayılırsa 3 bitlik çıkışın eldesi için gerekli lojik denklem şu hale gelecektir:
Q0 = D1 • D2' •D4' •D6' +D3 • D4' •D6' +D5 • D6' +D7
(5.6)
Q1 = D2 • D4' •D5' +D3 • D4' •D5' +D6 + D7
(5.7)
Q2 = D4 + D5 + D6 + D7
(5.8)
Tablo 5.1 8e-3lük MC14532B öncelikli kodlayıcı için doğruluk tablosu
Bu lojik denklemi gerçeklemek için CMOS NAND, NOR ve evirici yapıları
kullanılmıştır. Sistem hızının azalmasını engellemek için kullanılan NMOS ve PMOS
tranzistorların kanal boyları olabildiğince kısa tutulmuştur. Şekil 5.10’da CMOS yapılı
lojik kapıların şemaları görülmektedir.
5.5. Akım Modlu Paralel ADD
Şekil 5.11’de bir bitlik paralel modlu ADD hücresinin blok şeması görülmektedir.
(Girişte kullanılan örnekleme-tutma devresi ve öncelikli kodlayıcı sistemin tamamı
için kullanıldığı için gösterilmemiştir.)
69
Paralel ADDlerin en hızlı çevirici yapısı olmasına karşılık, kullanım açısından
dezavantajları bulunmaktadır. Bu dezavantajları oluşturan en büyük etken N bitlik
çözünürlüğe ulaşmak için 2N-1 adet Şekil 5.12’de temsil edilen yapılara gereksinim
duymasıdır. Bu durum, tasarlanacak olası paralel modlu ADD çözünürlüğünü 8 bit
ile sınırlamaktadır. Bu tezde akım modlu paralel ADD yapısının oluşturlabileceği
gösterileceği için yalnızca 3 bitlik yapı ile yetinilmiştir.
Şekil 5.10: Öncelikli kodlayıcıda kullanılan yapılar (a) CMOS NAND, (b) CMOS NOR
(c) CMOS evirici
Şekil 5.11: Akım modlu paralel ADD için 1-bitlik hücre örneği
Elde edilebilir işaretlerin çoğunun gerilim modlu olması nedeniyle işaretlerin akım
modlu işarete dönüştürülmesi gerekir. Bu dönüştürme için kullanılacak yapıların
düşük giriş empedansı ve yüksek çıkış empedansı özelliği göstermesi gerekir.
Literatürde bu konu ile ilgili referans alınacak bir çok çalışma vardır (Chen ve Wu,
1998, Wu ve diğ., 1995). Aktif eleman yardımıyla oluşturulan negatif gerbeslemeli
çevrim ile yapıların giriş dirençleri kazanç değeri kadar azaltılmaktadır. Bu aktif
eleman genellikle işlemsel kuvvetlendirici olarak seçilmektedir. Tasarlanan ADD
yüksek hızlı olduğu için kullanılacak dönüştürücünün hızı da yüksek olmalıdır. Aksi
takdirde ADDnin çevrim hızı, V-I çevircinin hızı ile sınırlı kalacaktır. Bu nedenle V-I
çeviricide yüksek kazanç-bandgenişlikli işlemsel kuvvetlendiriciler kullanılmalıdır. Bu
çevrim için en uygun başka bir yapı yüksek performanslı akım taşıyıcı kullanılarak
70
oluşturulabilir. Şekil 5.12’te bir akım taşıyıcı kullanılarak çevrimin nasıl yapılacağı
gösterilmiştir.
Şekil 5.12: Akım taşıyıcı kullanılarak V-I dönüştürme işlemi
Uygulamada kullanılacak akım taşıyıcıya göre tanım bağıntıları değişecektir. Bu
akım taşıyıcının ikinci nesil olduğu varsayılırsa ve tanım bağıntıları da gözönüne
alınıp IZ=Iref, VY=Vref kabul edilirse, elde edilecek denklem şu şekilde yazılabilir:
I ref =
Vreferans
R
(5.9)
Bu devre yapısının aynısı kullanılarak giriş geriliminden giriş akımı da elde edilebilir.
Paralel Modlu ADDnin 3 bitlik olduğu gözönüne alındığında Şekil 5.11’de gösterilen
yapıdan 7 adede gereksinim duyulmaktadır. Her yapıda akıtılan referans akımı
birbirine eşit uzaklıktaki 7 adet kuantalama seviyesine karşılık gelmektedir. LSB
değerini elde etmek için gerekli referans akım değeri yukarıda belirtilen yöntem ile
akıma dönüştürülüp, yapı içinde kullanılacak akım aynaları ile diğer altı adet
referans akım değeri elde edilmektedir. Bu yedi kuantalama seviyesine karşılık ise
yedi elemanlı termometre kodu elde edilmekte ve 8’e-3’lük bir öncelikli kodlayıcı ile
2’lik sisteme dönüştürülüp, çevrim tamamlanmaktadır.
Tasarlanan ADDnin çevrim hızını görebilmek için Pspice simulasyon programı
kullanılmıştır.Kuantalama basamakları (aynı zamanda bu değerler, yedi adet
referans akımını temsil etmektedir) 12.5µA değerinden başlatılarak, 25µA’lik
artımlarla 162.5µA değerine kadar yükseltilmiştir. Girişe, genliği 175µA, peryodu
28ns olan üçgen dalga uygulanmıştır. Bu işaretin ideal bir örnekleme tutma
devresinden geçirildiği varsayımıyla 2ns’de bir örnekler alınmıştır. Bu durumda giriş
işareti 175µA akım değerine kadar 2ns’de bir genliği 25µA artan ve tepe değerine
ulaştıktan sonra 2ns’de bir genliği 25µA azalan basamak şeklinde işarete
dönüşmüştür. Şekil 5.13(a)’da sözkonusu giriş işareti görülmektedir. Şekil 5.13(b),
(c), ve (d)’de sırasıyla dönüşüm sonrasında Bit2, Bit1 ve Bit0 değerleri
71
görülmektedir.
Görüldüğü
üzere
tasarlanan
akım
modlu
paralel
analog
dijitaldönüştürücü kod kaybına izin vermeden düzgün olarak çalışmaktadır.
Elde edilen üç bitlik sayısal veri, ideal DAD kullanılarak tekrar analog veriye (ADD
girişine uygulanan tutulmuş işaret) dönüştürülüp giriş işareti ile karşılaştırılmıştır.
İdeal kabul edilen DAD girişine 3’e 7lik kod çözücü bağlanmış termometre DAD
olduğu varsayılmıştır. Bu nedenle ikilik düzendeki 3 bitlik çıkışları bu DAD ye
bağlamak yerine, öncelikli kodlayıcıya giden akım karşılaştırma devrelerinin çıkışları
bağlanmıştır. Şekil 5.14’de bu ideal DAD ve Şekil 5.15’da elde edilen çıkış işareti
görülmektedir.
Zaman
Şekil 5.13: 3-bitlik akım modlu paralel ADD simulasyon sonucu (a) Giriş işareti (b) 3bitlik çıkış işaretinin en anlamlı biti (c) 3-bitlik çıkış işaretinin ikinci en anlamlı biti (d)
3-bitlik çıkış işaretinin endüşük anlamlı biti
72
Şekil 5.15’dan görüldüğü üzere, sayısal analog çevrim sonucunda elde edilen işaret,
giriş işaretinden (basamak süreleri gözönüne alındığında) biraz farklıdır. Bu farklılık
kullanılan akım karşılaştırıcı devrelerinin cevap sürelerinin (anahtarlama frekansına
bağlı olarak) değişmesinden kaynaklanmıştır. Karşılaştırıcıların 1.5ns’de bir çıkış
verdikleri gözönüne alınırsa, 2ns boyunca karşılaştırıcılar bir ya da iki kez
karşılaştırma yapacaktır. Buna rağmen analog dijital dönüştürme sonucunda kod
kaybı sözkonusu olmayacaktır.
Şekil 5.14: İdeal termometre DAD
Zaman
Şekil 5.15: Analog sayısal çevrimden sonra yapılan sayısal analog çevrim ile elde
edilen işaret
73
5.6. Tasarlanan ADDnin Performansının Belirlenmesi
İkinci bölümde üzerinde durulan performans ölçütlerinin belirlenebilmesi için elde
edilen sayısal veriler tekrar analog işarete dönüştürülmeli ve FFTsi alınarak
performansı etkileyen bozucu etkilerin değeri hesaplanmalıdır.
Tasarlanan ADDnin çözünürlüğünün düşük olması nedeniyle performansını
belirleyici ölçütlerden ENOB değeri ile yetinilecektir. İşaretin FFTsinin hesabı için
MATLAB programından yararlanılmıştır. Elde edilen bileşenlerden SNDR ve ENOB
değerinin belirlenilmesinde ise yine MATLAB programı kullanılarak yazılan kod
kullanılmıştır (Anderson, 2005). Kullanılan bu kodun doğruluğunu ispatlamak için
örnekleme frekansı 666MHZ dikkate alınarak, Nyquist frekansına kadar olan frekans
bölgesinde seçilmiş olan değişik frekans değerli, 3bit elde edilecek şekilde
kuantalanmış, sinusoidal işaretler girişe uygulanmıştır. Bu işaretlerin ayrı ayrı 1024
noktada FFTsi hesaplanmış ve frekans-ENOB eğrisi Şekil 5.16’ da gösterilmiştir.
Şekil 5.16: Yalnızca kuantalama hatası olan işaretler için elde edilen ENOB
değerleri
Şekil 5.16’dan da görüleceği üzere hesaplanan ENOB değeri %3lük sapma ile doğru
sonuç vermektedir. Bu durum gözönüne alınarak tasarlanan ADDnin ENOB
değerinin hesaplanmasında bu kod kullanılacaktır.
ADDlerin AC performansının belirlenmesinde girişe uygulanan sinusoidal işaretin
frekansı Nyquist frekansına yakın seçilmektedir. Bu tezde yapılan performans
belirlenmesinde, giriş işareti olarak frekansı 319.7MHz olan sinusoidal giriş işareti
74
kullanılmıştır. Elde edilen sayısal veri tekrar analog veriye dönüştürülmüş ve 256
noktada FFTsi alınmıştır. Elde edilen güç spektrum eğrisi Şekil 5.17’ de
görülmektedir. 319.7 MHz giriş işareti için SNDR ve ENOB değerleri sırasıyla,
14.91dB ve 2.18 bit olarak hesaplanmıştır.
Şekil 5.17: 319.7MHz giriş işareti için çıkış işaretinin güç spektrum gösterimi
Şekil 5.18: 62.77MHz giriş işareti için çıkış işaretinin güç spektrum gösterimi
75
Tasarlanan ADDnin daha düşük frekanslardaki performansını görebilmek için giriş
işaretinin frekansı 62.77MHz olarak belirlenerek, girişe uygulanmıştır. Çıkış işareti
tekrar analog veriye dönüştürüldükten sonra 256 nokatada FFTsi alınmıştır. SNDR
ve ENOB değerleri sırasıyla, 17.65dB ve 2.64 bit olarak hesaplanmıştır.
76
6. SONUÇ
Bu tezde, akım modlu ve gerilim modlu ADDler karşılaştırılmış ve akım modlu
devrelerin daha üstün olduğundan hareketle 3-bitlik akım modlu paralel ADD
tasarımı yapılmıştır.
Paralel ADDler, yüksek çözünürlüklere çıkabilmek için çok miktarda karşılaştırıcı
yapısına ihtiyaç duymasından dolayı çip alanı ve güç harcaması bakımından
dezavantaj sağlamaktadır. Bu zorluklardan dolayı tasarlanan yapı 3-bit ile sınırlı
tutulmuştur. Buna karşılık analog dijital dönüştürme yalnızca bir saat döngüsünde
gerçekleştirmesinden dolayı yüksek çevrim hızına ulaşılmıştır. Bu gerçeklik yapılan
Pspice analizleri ile ortaya konmuştur.
Çeviricinin çözünürlüğünün 3bit ile sınırlı olmasından dolayı AC performans
ölçümlerinin hepsi yapılmamıştır. Yüksek frekanslardaki performansı hakkında fikir
sahibi olmak için, örnekleme frekansı 666MHz gözönüne alınarak, Nyquist
frekansına yakın bir değerde (319.7MHz) SNDR ve ENOB değerleri sırasıyla
14.91dB ve 2.18 bit olarak hesaplanmıştır.
Bu anlatılanlar ışığında tasarlanan ADD tek başına kullanılmak yerine başka ADD
sistemlerinin alt sistemi olarak kulanılması uygundur:
•
Bu yapı iki basamaklı ADD sisteminin bir alt sistemi olarak kullanılabilir.
Çevrim oranı yaklaşık yarı değerine düşsede, yeni sistemin çözünürlüğü
daha da artacaktır.
•
Yüksek hızlı örnekleme ve tutma devreleri kullanılarak “pipeline” ADD
sisteminin bir alt sistemi olarak kullanılabilir. “pipeline” gecikmesi gözardı
edilirse, yeni sistemin çevrim oranı aynı çözünürlükteki paralel ADDnin
çevrim oranıyla aynı yapılabilir.
77
KAYNAKLAR
Anderson, M., 2005, Integrated AD/DA Converters Lab Assignments, Lund
University, İsveç, http://www.tde.lth.se/home/man
Bilhan, H., and Gosney, W.M., 1999. A 13 bit 20Ms/s Current Mode Pipelined
Analog to Digital Converter, Proceedings of the Thirteenth Biennial
University/Government/Industry Microelectronics Symposium, June
1999, 131-138
Cable, A. and Harjani, R., 1994. A 6-Bit Current-Subtracting Two Step Flash
Converter, ISCAS'94., 1994 IEEE International Symposium on
Circuits and Systems, June 1994, Vol. 5, 465-468
Chen, C. and Wu,C., 1998, Design Techniques for 1.5-V Low-Power CMOS
Current-Mode
Cyclic
Analog-to-Digital
Converters,
IEEE
Transactions on Circuits and Systems-II: Analog and Digital Signal
Processing, Vol. 45, No. 1, 28-40
Chen, L., Shi, B. And Lu,C., 2000, A high speed/power ratio continuous-time
CMOS current comparator, ICECS 2000-The 7th IEEE International
Conference on Electronics, Circuits and Systems, December 2000,
Vol. 2, 883-886
Fiez, T.S., Liang, G., and Allstot, D.J., 1991. Switched-Current Circuit Design
Issues, IEEE Journal of Solid-State Circuits, Vol. 26, No. 3, 192-202.
Flynn, M.P. and Sheahan, B., 1998. A 400-Msample/s, 6-b CMOS Folding and
Interpolating ADC, IEEE Journal of Solid-State Circuits, Vol. 33, No.
12, 1932-1938.
Geiger, R.L., Allen, P.E., Strader, N.R., 1990. VLSI Design Techniques for Analog
and Digital Circuits, McGra-Hill Publishing Company, New York
Giustolisi, G., Palumbo, G., Pennisi, S., 2002. Satatistical Analysis of the
Resolution in a Current-Mode ADC, 9th International Conference on
Electronics, Circuits and Systems, September 2002, Vol. 1, 5-8
78
Gregorian, R., 1999. Introduction to CMOS Op-Amps and Comparators, John
Wiley & Sons Inc., New York
Haykin, S., 1994. Communication Systems, John Wiley & Sons Inc., New York
Hu, X. and Martin,K.W., 1997. A Switched-Current Sample-and-Hold Circuit, IEEE
Journal of Solid-State Circuits, Vol. 32, No. 6, 898-904
Hughes, J.B., Bird, N.C., Machbeth, I.C., 1989. Switched Currents – A New
Technique For Analog Sampled-Data Signal Processing,
Proc.
IEEE Int. Symp. Circuits Systems, 1584-1587
Hughes, J.B., Moulding, K.W., 1993. S2I : A Two-Step Approach to SwitchedCurrents, ISCAS'93, 1993 IEEE International Symposium on Circuits
and Systems, May 1993, Vol.2, 1235-1238
Kang, S., and Leblebici, Y., 1999. CMOS Digital Integrated Circuits: Analysis and
Design, WCB/McGraw-Hill, Boston
Kaya,T., 2002. A CMOS High-Resolution Current-Mode Algorithmic Analog-toDigital Converter, Yüksek Lisans Tezi, İ.T.Ü. Fen Bilimleri Enstitüsü,
İstanbul
Kester, W., 2004. Analog-Digital Conversion, Analog Devices Inc., USA
Lin, H., Huang, J. and Wong, S., 2000, A Simple High-Speed Low Current
Comparator, ISCAS 2000 - IEEE International Symposium on
Circuits and Systems, Geneva, Switzerland, May 2000, 713-716
Mangeldorfs, C.W., 1990, A 400-MHz Input Flash Converter with Error Correction,
IEEE Journal of Solid-State CircuitsIEEE Journal of Solid-State
Circuits, Vol. 25, No.1, 184-191
Mano, M., 1991. Digital Design, Prentice-Hall, Inc., New Jersey
Maxim, 2001, The ABCs of ADCs: Understanding How ADC Errors Affect System
Performance,
MAXIM
Integrated
Circuits
Application
Notes,
http://www.maxim-ic.com/appnotes.cfm/appnote_number/748
McClellan, J.H., Schafer, R.W. and Yoder, M.A., 1998. DSP First: A Multimedia
Approach, Prentice-Hall, Inc., London
Nairn, D.G., 1996. A High-Linearity Sampling Technique for Switched-Current
Circuits, IEEE Transactions on Circuits ans Systems-II: Analog and
Digital Signal Processing, Vol. 43, No. 1, 49-52
79
Nairn, D.G., Andre, C., Salama,T., 1989. Current mode analog-to-digital
converters, IEEE International Symposium on Circuits and Systems,
May 1989, Vol. 3, 1588-1591
Nairn, D.G., Andre, C., Salama,T., (1988a). A Current Mode Algorithmic Analogto-Digital Converter, IEEE International Symposium on Circuits and
Systems, June 1988, Vol. 3 2573-2576
Nairn, D.G., Andre, C., Salama,T., (1988b). High Resolution Current Mode A/D
Converters Using Active Current Mirrors, Electronics Letters, Vol. 24,
1331- 1332
Oliveira, J.P., Vital, J. and Franca, J.E., 1996. ISCAS '96., 'Connecting the
World'., 1996 IEEE International Symposium on Circuits and
Systems, May 1996, Vol. 1, 199-202
ON Semi,
MC14532B 8-Bit Priority Encoder, ON Semiconductor datasheets,
http://www.onsemi.com/pub/Collateral/MC14532B-D.PDF
Razavi, B., 1995. Principles of Data Conversion System Design, IEEE Press, New
York
Razavi, B., and Wooley, B.A., 1992. A 12-b 5-Msamples/s Two-Step CMOS A/D
Converter, IEEE Journal of Solid-State Circuits, Vol.27, No.12, 16671678
Ravezzi, L., Stoppa, D. and Betta,G.F.D., 1997.
Current Comparators,
Simple High-speed CMOs
Electronics Letters, Vol. 33, No.22, 1829-
1830
Real, P., Robertson, D.H., Mangeldorf, C.W. and Tewksbury, T.L., 1991. A
Wide-Band 10-b 20-Ms/s Pipelined ADC Using Current-Mode
Signals, IEEE Journal of Solid-State Circuits, Vol.26, No. 8, 11031109
Rodriguez-Vazquez, A., Medeiro, F. and Janssens, E., 2003. CMOS Telecom
Data Converters, Kluwer Academic Publishers, Boston
Roientan Lahiji, G. and Rezvan, F., 2000. A Full Differential Low Voltage Low
Power High Speed Current Comparator, ICM 2000. Proceedings of
the 12th International Conference on Microelectronics, October
2000, 103-106
80
Serrano T. And Barranco, B.L., 1994, The Active-Input Regulated Cascode
Current Mirror, IEEE Transactions on Circuits and Systems-I:
Fundamental Theory and Applications, Vol. 41, No.6, 464-467
Shimizu, T., Hotta, M., Maio, K. And Ueda, S., 1989. A 10-bit 20MHz Two-Step
Parallel A/D Converter with Internal S/H, IEEE Journal of Solid State
Circuits, Vol. 4, No.1, 13-20
Sone, K., Nishida, Y. And Nakadai, N., 1993. A 10-b 100Msample/s Pipelined
Subranging BiCMOS ADC, IEEE Journal of Solid State Circuits, Vol.
28, No. 12, 1180-1186
Sugimoto, Y. and Imai, S., 1999. The design of a 1V, 40MHz, Current Mode
Sample-and-Hold
Circuit
with
10-Bit
Linearity,
ISCAS
'99.
Proceedings of the 1999 IEEE International Symposium on Circuits
and Systems, May 1999, Vol. 2, 132-135
Sugimoto, Y., 2004. A Realization of a Below-1-V Operational and 30-MS/s
Sample-and-Hold IC With a 56-dB Signal-to-Noise Ratio by Applying
the Current-Based Circuit Approach, IEEE Transaction on Circuits
and Systems-I:Regular Papers, Vol. 51, No. 1, 110-117
Tang, A. and Toumazou, C., 1994. High Performance CMOS Current Comparator,
Electronics Letters, Vol. 30, No.1, 5-6
Toumazou, C., Hughes, J.B., Pattullo, D.M., 1990. Regulated Cascode SwitchedCurent Memory Cell, Electronic Letters, Vol. 26, No. 5, 303-305
Toumazou, C., Lidgey, F.J. and Haigh, D.G., 1990. Analogue IC Design: The
Current Mode Approach, Peter Peregrinus Ltd., London
Worapishet, A., Hughes, J.B., Toumazou, C., 2000. Low-Voltage Class AB TwoStep Sampling Switched-Currents, ISCAS 2000-IEEE International
Symposium on Circuits and Systems, Geneva, Switzerland, May
2000, 413-416
Wu, C., Chen, C. and Cho,J., 1995, A CMOS transistor-only 8-b 4.5-Ms/s
pipelined analog-to-digital converter using fully-differential currentmode circuit techniques, IEEE Journal o Solid-State Circuits, Vol. 30,
522-532
Wu, C., and Liow, Y., 2000. High-Speed CMOS Current-Mode Wave-Pipelined
Analog-to-Digital Converter, ICECS 2000-The 7th IEEE International
81
Conference on Electronics, Circuits and Systems, December 2000,
Vol. 2, 907-910
Yin, G.M., Eynde, F.O. and Sansen, W., 1992. A High-Speed CMOS Comparator
with 8-b Resolution, IEEE. Journal of Solid-State Circuits, Vol. 27,
No.2, 208-211
82
EK-A
Pspice simülasyonlarında
parametreleri
kullanılan
0.5µm
.MODEL NT NMOS LEVEL=3
UO=460.5
TOX=1.0E-8
TPG=1
VTO=.62
JS=1.8E-6
XJ=.15E-6
RS=417
RSH=2.73
LD=0.04E-6
ETA=0
VMAX=130E3
NSUB=1.71E17
PB=.761
PHI=0.905
THETA=0.129
GAMMA=0.69
KAPPA=0.1
AF=1
WD=.11E-6
CJ=76.4E-5
MJ=0.357
CJSW=5.68E-10
MJSW=.302
CGSO=1.38E-10
CGDO=1.38E-10
CGBO=3.45E-10
KF=3.07E-28
DELTA=0.42
NFS=1.2E11
83
CMOS
teknolojisi
tranzistor
.MODEL PT PMOS LEVEL=3
UO=100
TOX=1E-8
TPG=1
VTO=-.58
JS=.38E-6
XJ=0.1E-6
RS=886
RSH=1.81
LD=0.03E-6
ETA=0
VMAX=113E3
NSUB=2.08E17
PB=.911
PHI=0.905
THETA=0.120
GAMMA=0.76
KAPPA=2
AF=1
WD=.14E-6
CJ=85E-5
MJ=0.429
CJSW=4.67E-10
MJSW=.631
CGSO=1.38E-10
CGDO=1.38E-10
CGBO=3.45E-10
KF=1.08E-29
DELTA=0.81
NFS=0.52E11
84
ÖZGEÇMİŞ
Mustafa Cem Özkılıç 1979 yılında İstanbul’da doğmuştur. 1997 yılında Kadıköy
Anadolu Lisesi’nde lise öğrenimini tamamlamıştır. 2002 Ocak ayında İstanbul Teknik
Üniversitesi Elektrik-Elektronik Fakültesi’nden Elektronik ve Haberleşme Mühendisi
olarak mezun olmuştur. 2002 Eylül’ünden beri OHM Elektronik AR-GE bölümünde
mikrokontrolör denetimli sistemler üzerinde çalışmaktadır.
85