ANKARA ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
YÜKSEK LİSANS TEZİ
VİDEO GÖRÜNTÜLERİNİN SABİTLENMESİ
Gürkan KOCADERE
ELEKTRONİK MÜHENDİSLİĞİ ANABİLİMDALI
ANKARA
2010
Her Hakkı Saklıdır
TEZ ONAYI
Gürkan
KOCADERE
tarafından
hazırlanan
“VİDEO
GÖRÜNTÜLERİNİN
SABİTLENMESİ” adlı tez çalışması 26/05/2010 tarihinde aşağıdaki jüri tarafından oy
birliği ile Ankara Üniversitesi Fen Bilimleri Enstitüsü Elektronik Mühendisliği
Anabilim Dalı’nda YÜKSEK LİSANS TEZİ olarak kabul edilmiştir.
Danışman
: Doç. Dr. Ziya TELATAR
Jüri Üyeleri :
Başkan :
Yrd. Doç. Dr. Alptekin TEMİZEL
Orta Doğu Teknik Üniversitesi Enformatik Enstitüsü
Üye
:
Doç. Dr. Ziya TELATAR
Ankara Üniversitesi Elektronik Mühendisliği A.B.D.
Üye
:
Yrd. Doç. Dr. Hakkı Alparslan ILGIN
Ankara Üniversitesi Elektronik Mühendisliği A.B.D.
Yukarıdaki sonucu onaylarım
Prof. Dr. Orhan ATAKOL
Enstitü Müdürü
ÖZET
Yüksek Lisans Tezi
VİDEO GÖRÜNTÜLERİNİN SABİTLENMESİ
Gürkan KOCADERE
Ankara Üniversitesi
Fen Bilimleri Enstitüsü
Elektronik Mühendisliği Anabilim Dalı
Danışman: Doç. Dr. Ziya TELATAR
Video görüntüleme aygıtlarının bulunduğu, sabit platform üzerinde belli bir alanı
gözleyen, sistemlerde rüzgar, ani darbe vb dış etkenlerin sebep olduğu istenmeyen
hareketlerin veya iki eksenli çevre gözetleme sistemlerine sahip platformların rastgele
hareketlerinden dolayı video görüntüsüne yansıyan istenmeyen hareketlerin giderilmesi
maksadıyla çevresel şartlardan bağımsız (ışık değişimi vb), ve aynı zamanda bilinçli
hareketlere karşı hassas, güvenilir bir video görüntü sabitleme algoritması yaratmak
amaçlanmıştır. Bu koşullardan yola çıkarak, Ölçekten Bağımsız Öznitelik Dönüşümü
(Scale Invariant Feature Transform) tekniği kullanılmış, her görüntü dilimi için
bağımsız öznitelikler elde edilmiştir. Daha sonra bu özniteliklerin geçmişe bağımlı
olanları haricindekiler elenmiştir. Elde edilen güvenilir öznitelikler yardımı ile birbirini
takip eden görüntü dilimleri arasında öznitelik eşleştirmesi yapılmıştır. Eşleştirme
yapılırken Öklid mesafesi eşik değeri arttırılarak benzer özellikteki özniteliklerin yanlış
eşleşmesi engellenmiştir. Elde edilen eşleştirmeler ile yerel hareket vektörleri
bulunmuştur. Yerel hareket vektörleri gruplanarak farklı yönelime sahip yanıltıcı
vektörler elenmiştir ve hareket kestirim hataları en aza indirilmiştir. Elde edilen
güvenilir yerel hareket vektörleri ile her görüntü dilimi için genel hareket vektörü
bulunmuştur. Kare ortalamalarının karekökü yardımı ile elde edilen genel vektörlerin
ortalama değer eğrileri alınmış ve bilinçli hareket, rastgele salınımlardan ayırt edilerek
hata düzeltmesi yapılmıştır. Elde edilen istenmeyen hareket verileri değerlendirilerek
görüntü durağan hale getirilmiştir.
Mayıs 2010, 64 sayfa
Anahtar Kelimeler : Video Sabitlenmesi, Görüntü Sabitlenmesi, Hareket Kestirimi,
Hareket Dengelemesi, Geçmişe Bağımlı Öznitelikler
i
ABSTRACT
Master Thesis
VIDEO IMAGE STABILIZATION
Gürkan Kocadere
Ankara University
Graduate School of Natural and Applied Sciences
Department of Electronic Engineering
Supervisor : Assoc. Prof. Dr. Ziya TELATAR
The aim of this study is to develop a video stabilization algorithm to avoid unwanted
effects on visualization which is created by random motions of the video capturing
platforms and which is independent from environmental conditions (illumination, noise,
etc.), and is sensitive and reliable to concious motions at the same time. By providing
these requirements, ”Scale Invariant Feature Transform” technique is used and for every
frame, independent features are obtained. After that, features which are independent
from previous frame features are eliminated. Then, by using these features, each
following frame features are matched and with these matches local motion vectors are
created. To avoid incorrect matching with similar features, Euclidean distance threshold
value is modified and discard incorrect matches. Motion estimation errors are
minimized by filtering the local motion vectors. With the obtained reliable local motion
vectors, the global motion vector of each frame is created.The average value graphs of
global vectors which are obtained by the root mean square method are drawn and by the
differentiation of the concious motion and random swinging ,the error correction is
done. As a result, all the unconcious motion data are evaluated and the video is
stabilized.
May 2010, 64 pages
Key Words : Video Stabilization, Image Stabilization, Motion Estimation, Motion
Compensation, Past Related Features
ii
TEŞEKKÜR
Çalışmalarımı yönlendiren, araştırmalarımın her aşamasında bilgi, öneri ve yardımlarını
esirgemeyerek akademik ortamda olduğu kadar beşeri ilişkilerde de engin fikirleriyle
yetişme ve gelişmeme katkıda bulunan danışman hocam sayın Doç. Dr. Ziya
TELATAR’a (Ankara Üniversitesi Elektronik Mühendisliği A.B.D.), akademik
çalışmam süresince bana destek olan iş arkadaşlarıma, çalışmalarımı gerçekleştirirken
rahatımı sağlamak için peşimden ayrılmayan Anneme ve Babama, aynı şekilde kendi
ailemden ayırmadığım eşimin ailesine ve tabiki uzun geceler birlikte çalıştığım biricik
eşim Selay ARKÜN KOCADERE’ye en derin duygularım ile teşekkür ederim.
Gürkan KOCADERE
Ankara, Mayıs 2010
iii
İÇİNDEKİLER
ÖZET………………………………………………………………………………….....i
ABSTRACT…………………………………………………………………………….ii
TEŞEKKÜR……………………………………………………………………………iii
KISALTMALAR………………………………………………………………………vi
ŞEKİLLER DİZİNİ.……………………………………………………………….....vii
ÇİZELGELER DİZİNİ..…………………………………………………………….viii
1.
GİRİŞ ................................................................................................................... 1
1.1
Görüntü Sabitleme Teknikleri ......................................................................... 1
1.1.1
Elektromekanik görüntü sabitleme .................................................................. 1
1.1.2
Optik görüntü sabitleme .................................................................................... 2
1.1.3
Sayısal görüntü sabitleme .................................................................................. 3
2.
KURAMSAL TEMELLER ................................................................................ 8
2.1
Histogram .......................................................................................................... 8
2.2
Gradyan ............................................................................................................. 8
2.3
Hareket Analizi.................................................................................................. 9
2.3.1
Görüntü kayması ................................................................................................ 9
2.3.2
Görüntü dönmesi .............................................................................................. 10
2.3.3
Ölçek değişimi .................................................................................................. 11
2.3.4
Görüntü eğrilmesi ............................................................................................ 12
2.3.5
Hareket kestirim modeli .................................................................................. 13
2.4
Laplacian Of Gaussian (LoG) ........................................................................ 14
2.5
Difference Of Gaussian (DoG) ....................................................................... 15
2.6
Gauss Çekirdeği Ölçek Uzayı ......................................................................... 17
2.7
Ölçekten Bağımsız Öznitelik Dönüşümü (ÖBÖD) ....................................... 18
2.7.1
Ölçek uzayı uç noktalarının bulunması ......................................................... 19
2.7.2
Anahtar noktaların yerleştirilmesi ve dengeli noktaların seçimi ................ 23
2.7.3
Yönelimlerin atanması ..................................................................................... 27
2.7.4
Anahtar nokta tanımlayıcılarının tespiti ....................................................... 29
2.8
Görüntü Özniteliği ve Öznitelik Eşleştirme .................................................. 31
2.9
En Küçük Kareler Yöntemi (EKK) ............................................................... 33
iv
3.
MATERYAL VE YÖNTEMLER.................................................................... 36
3.1
Materyal ........................................................................................................... 36
3.2
Yöntem ............................................................................................................. 36
3.2.1
Geçmişe bağımlı öznitelikler ........................................................................... 39
3.2.2
Eşleştirme eşik değeri ile güvenilir YHV’lerin bulunması ........................... 46
3.2.3
Bilinçli hareket kestrimi .................................................................................. 50
4.
BULGULAR ...................................................................................................... 54
5.
TARTIŞMA VE SONUÇ.................................................................................. 57
KAYNAKLAR………………………………………………………………………...59
ÖZGEÇMİŞ…………………………………………………………………………...64
v
KISALTMALAR
AFT
Ayrık Furier Dönüşümü
AHVE
Adaptif Hareket Vektörü Entegrasyonu
AMVI
Adaptive Motion Vector Integration
BBF
Best Bin First
DFT
Discrete Fourier Transform
DOG
Difference Of Gaussian
DTW
Dynamic Time Warping
DZE
Dinamik Zaman Eğrilmesi
EKK
En Küçük Kareler
EYK
En Yakın Komşu
GBÖ
Geçmişe Bağımlı Öznitelik
GF
Gauss Farkı
GHV
Genel Hareket Vektörü
HGÖ
Hızlandırılmış Güvenilir Öznitelikler
ILSM
Iterative Least Square Method
İEİB
İlk En İyi Bin
KOK
Kare Ortalamalarının Karekökü
LOG
Laplacian of Gaussian
NN
Nearest Neighbour
ÖBÖD
Ölçekten Bağımsız Öznitelik Dönüşümü
PFM
Parabolic Fitting Method
PYY
Parabolik Yerleştirme Yöntemi
RMS
Root Mean Square
SIFT
Scale Invariant Feature Transform
SURF
Speeded-Up Robust Features
TEKKT
Tekrarlayan En Küçük Kareler Tekniği
YHV
Yerel Hareket Vektörü
vi
ŞEKİLLER DİZİNİ
Şekil 1.1 Optik görüntü sabitlemede kullanılan mercek kayması ..................................... 3
Şekil 2.1 Görüntü ve görüntüye ait gri histogram grafiği ................................................. 8
Şekil 2.2 ekseni ve ekseni boyunca ve kadar görüntü kayması .................. 10
Şekil 2.3 Orijin merkezli dönme hareketi ....................................................................... 11
Şekil 2.4 Görüntü kaynak noktasına yakınlaşması ile oluşan görüntü büyümesi ........... 12
Şekil 2.5 ekseni ve ekseni yönünde kadar eğrilme hareketi ................................. 12
Şekil 2.6 Farklı değerleri için ölçek uzayı ................................................................... 17
Şekil 2.7 Oktavların tanımlanması .................................................................................. 21
Şekil 2.8 Oktav bazında DoG’un hesaplanması .............................................................. 22
Şekil 2.9 Yerel maksimum ve minimumların bulunması................................................ 23
Şekil 2.10 Anahtar noktalarının elenmesi ile gerçek anahtar noktalarının tespiti........... 27
Şekil 2.11 Görüntü gradyanı ve anahtar nokta tanımlayıcılar......................................... 30
Şekil 2.12 k-d ağacı uygulaması ..................................................................................... 33
Şekil 2.13 EKK yöntemi ile bulunan fonksiyon eğrisi ................................................... 35
Şekil 3.1 Görüntü sabitleme algoritma adımları ............................................................. 38
Şekil 3.2 Görüntünün yer değiştirmesi ile belirlenen ortak öznitelikler ......................... 40
Şekil 3.3 Hareketli görüntü ortak alanı ........................................................................... 41
Şekil 3.4 Geçmişe bağımlı özniteliklerin bulunması ...................................................... 41
Şekil 3.5 Farklı görüntülerin GBK ile öznitelik ilişkileri ............................................... 44
Şekil 3.6.a. Geçmişe bağımlı olmayan, b. Geçmişe bağımlı olan öznitelikler ............... 45
Şekil 3.7 YHV’den GHV’ünün tanımlanması ................................................................ 46
Şekil 3.8 Eşleşme eşik değerinin arttırılması ile yanlış eşleşmelerin giderilmesi........... 47
Şekil 3.9.a.b. Farklı yönelim gösteren öznitelikler ......................................................... 49
Şekil 3.10 Bilinçli hareket etrafındaki istenmeyen hareket eğrisi................................... 50
Şekil 3.11 x ekseni için hareketin bütününden bilinçli hareketin tespiti........................ 53
Şekil 3.12 y ekseni için hareketin bütününden bilinçli hareketin tespiti........................ 53
vii
ÇİZELGELER DİZİNİ
Çizelge 3.1 Farklı görüntülerin GBK ile öznitelik ilişkileri ........................................... 43
Çizelge 3.2 Eşleştirme eşik değerinin hatalı eşleşme üzerindeki etkisi .......................... 48
Çizelge 5.1 Örnek görüntü dilimleri için işlem yükü dağılımı ....................................... 59
viii
1. GİRİŞ
Canlılara özgü algılama yeteneklerinin belki de en önemlilerinden görme duyusunun
günümüz teknolojileri ile gerçeklenmesinin somut örneklerinden olan görüntüleme
cihazlarına, gerçekliğe yakın olması için özellikler kazandırılmaya çalışılmaktadır. Bu
özelliklerden birisi de; görüntüleme aygıtlarındaki istenmeyen veya planlı bir hareketin
elde edilen görüntüye aksetmesini engellemek üzere geliştirilen görüntü sabitleme
teknikleridir.
Görüntüleme aygıtı; bulunduğu platformun istenmeyen hareketinden ötürü algıladığı
görüntülere bu hareketi yansıtır. Bu, algılanan görüntü için istenmeyen bir durumdur.
Nitekim insan gözü, vücudu hareket halindeyken bile odaklandığı nesneden
ayrılmayarak hareketleri ile kendi sabitlemesini yapabilmektedir. Benzer teknikler
görüntüleme aygıtları için de kullanılabilir.
1.1
Görüntü Sabitleme Teknikleri
Üç farklı görüntü sabitleme türü mevcuttur (Nulph 2009) Bunlar; Elektromekanik
Görüntü Sabitleme (EGS), Optik Görüntü Sabitleme (OGS) ve Sayısal Görüntü
Sabitleme (DGS)’dir.
1.1.1 Elektromekanik görüntü sabitleme
Görüntüleme aygıtının bulunduğu platformun planlı veya istenmeyen rastgele hareketi,
ivme ölçer, açısal algılayıcılar, manyetik algılayıcılar gibi hareket tespit cihazları ile
algılanarak aygıtın normalini sabit tutabilecek ters yönlü mekanik hareket uygulanması
ile hareketten en az seviyede etkilenmesi sağlanabilir. Hareketin, bahsi geçen ölçüm
cihazları ile algılanarak işlenmesi ve mekanik yapıya görüntünün sabit kalması için ters
yöndeki hareketin sağlanması için geçen süre tam anlamı ile bir görüntü sabitleme
1
gerçekleştiremeyeceği için görüntüde bulanıklığa neden olacaktır. Bu sebeple, bazı
teknikler (Bayrak ve Ulusoy 2009) ile bu yöntem desteklenmelidir.
Kullanılan ölçüm cihazlarının ve mekanik yapının boyutları ve maliyetleri bu
uygulamanın küçük boyutlu, düşük maliyetli cihazlarda kullanımını elverişsiz
kılmaktadır. Diğer yandan; hareket halindeki, askeri amaçlı arazi araçlarında veya deniz
araçlarında kullanılan silah platformları gibi hareket kabiliyeti olan elektromekanik
platformlardan gelen veriler bu platformlarda kullanılan görüntüleme aygıtlarını da
destekleyecek yapıda olması sebebi ile kullanılabilirler.
1.1.2 Optik görüntü sabitleme
Optik görüntü sabitleme; elektromekanik görüntü sabitleme ile benzer mantık üzerine
kurulmuştur. Burada tek fark, ters hareketin aksettirildiği mekanik yapı’nın görüntüleme
aygıtı üzerindeki algılayıcısına görüntünün düşmesini sağlayan lens olmasıdır. Bu tip
uygulamalarda, görüntüleme aygıtlarında kullanılan lens yerleşimindeki lensler
arasındaki
uzaklıklar,
odaklanan
görüntünün
kırınımını
değiştirerek
görüntü
algılayıcısının her zaman aynı yerine düşmesini sağlayıcı şekilde yatay veya düşey
hareket etmektedir (Şekil 1.1). Bu yöntem elektromekanik yapıya göre daha başarılı
sonuç vermesine karşılık lenslerin, hareketi için fiziksel bir alana ihtiyaç duyması ve
görüntüleme hassasiyetini bozmadan bu hareketin aksettirilmesinin pahalı bir çözüm
olması sebebi ile her zaman tercih edilmemektedir. Kaliteli el kameralarında yaygın
kullanılan bir tekniktir. Ayrıca stüdyo çekimlerinde kullanılan video kameralarda
elektromekanik sabitleme düzeneklerini destekleyici olarak kullanılır.
2
Şekil 1.1 Optik görüntü sabitlemede kullanılan mercek kayması
1.1.3 Sayısal görüntü sabitleme
Fazladan bir donanım gerektirmediği için bahsi geçen yöntemlerden en ucuzudur. Aynı
zamanda sürekli geliştirilebilir olmaya açık bir yapıdadır. Bu sebeple, cep telefonu
kamerası, gibi boyutları küçük görüntüleme aygıtlarında yaygın olarak kullanılmaktadır.
Bu yöntem gerçek zamanlı görüntüler üzerinde kullanılabileceği gibi kayıt edilmiş
görüntüler için de uygulanabilir. Sabitlenecek görüntünün yönelim verisi, kendi
çerçevelerinin birbirleri ile olan ilişkisinde işlenmek sureti ile bulunur fakat bu yöntem
uygulanırken görüntüdeki nesnenin hareketinin görüntüleme aygıtının hareketinden mi
yoksa nesnenin kendi hareketinden mi kaynaklandığının belirlenmesi gerekmektedir.
Video sabitleme teknikleri genellikle hareket kestirimi ve hareket düzeltme
algoritmaları barındırır. Farklı kategorilerde değerlendirilen video sabitleme teknikleri
(Nulph 2009) arasında incelenen sayısal görüntü sabitleme tekniklerinden olan ve
Ertürk (2003) tarafından geliştirilen teknik, genel görüntüden elde edilen dört alt
görüntünün her birinin yerel hareketinin faz ilintisi tabanlı hareket kestirimi tekniği ile
3
genel hareketin bulunması prensibine dayanmaktadır. Alt görüntülerin faz ilinti
yüzeylerinin tepe noktalarına göre genel hareket vektörüne karar verilmektedir. Alt
görüntülerin faz ilintisi yüzeyleri, genişlemeden dolayı oldukça düşük tepe noktalarına
sahip alt görüntülerin güvenilir yerel hareket vektörlerini ortaya çıkarabilmektedir.
Kalman Süzgeci genel yer değiştirme vektörünün bulunabilmesi için görüntü
dilimlerindeki genel hareket vektörlerini biriktirerek sabitlemede kullanır.
Ertürk ve Dennis (2000)’in yayınladığı diğer bir teknikte ise Ayrık Furier Dönüşümü
(AFT) (Discrete Fourier Transform (DFT)) tabanlı faz ilinti yüzeyinden elde edilen
ortalama hareket vektörü ile görüntü dilimleri arasında hareket kestirimi ortaya
çıkarılabilmektedir. Bu yöntem ile bilinçli hareketler korunurken istenmeyen titreşimler
ayırt edilebilmektedir.
Foroosh vd. (2002) tarafından yayınlanan teknikte, alt örneklemesi gerçekleştirilmiş
görüntünün faz ilintisinin analitik ifadesi çıkartılmış ve bu faz ilintisinde, yalın tepe
noktalarında sinyalin yoğunlaşmadığı gösterilmiştir. Bunun yanında, tutarlı tepe
noktalarından çoğunun birbirine komşu olduğu gösterilmiştir. Bu yoğun tepe noktaları
kayıt noktasında tanımlı süzgeçlenmiş birim etkinin çok fazlı dönüşümüne karşılık
gelmektedir. Bu analitik sonuç, alt piksel dönüşüm kestirimini sağlamakta ve bu
kestirim hata analizinin detaylandırılmasında kullanılmaktadır. Alt piksel dönüşümü ile
farklı tayf bantlarında oldukça başarılı sonuçlar elde etmişlerdir.
Ko vd. (1999) gerçekleştirdikleri çalışmada ardışık görüntülerin gri seviye kodlanmış
bit yüzeylerini kullanarak hızlı ikili eşleştirmesi ile hareket kestirim algoritması
geliştirmişlerdir. Aynı zamanda, mevcut yerel hareket vektörlerini ve geçmişteki genel
hareket vektörlerinin istatistiksel sonucunu kullanarak hesaplama yapabilen hareket
düzeltme algoritması içeren sayısal hareket sabitleme algoritması önermişlerdir.
Paik vd. (1992) yayınladıkları çalışmada, farklı bir tam sayısal, kenar motifi
eşleştirmesine dayanan yeni bir teknik ile yeni adaptif hareket karar metodu
geliştirmişlerdir. İşlemin güvenilirliğinin yanında kenar motiflerinin yaratılması çok
fazla işlem yükü gerektirmektedir (Ko vd. 1999).
4
Vella vd. (2002) tarafından yayınlanan çalışmada, blok hareket vektörleri kullanılarak
hareket kestirimi yapılmıştır. Görüntüdeki her bloğa ait hareket vektörleri ile yapılan
hesaplamalar sonucu istenmeyen hareketler tespit edilmektedir. Burada her blok vektör
güvenilir değildir. Bunun sebebi homojen bir görüntüdeki homojen bir blok farklı
yönelime sahip yanıltıcı vektörler verebilmektedir. Bu sebeple algoritma homojen
dağılım gösteren yüzeylerde başarı sağlayamamaktadır. Nesnenin görüntünün ortasında
olduğu varsayılarak orta kısım ve arka kısım olmak üzere iki farklı blok üzerinde işlem
yapılır. Her iki alan için blok hareket kestirimi yapılarak hareket vektörleri hesaplanır.
Daha sonra her iki alan için genel hareket vektörleri bulunur. Şayet her iki genel hareket
birbirine eşit ise görüntüde bulunmak istenilen hareket vektörü belirlenmiş olur. Bu iki
vektör birbirlerine eşit değil ise istenmeyen hareketin hangi bölgede olduğu tespit edilir.
Kwon vd. (2005) tarafından yayınlanan çalışmada, Kalman Süzgeç tabanlı genel hareket
kestirim ve faz ilinti tabanlı hareket düzeltme algoritması sayısal görüntü sabitlemesi
için beraber kullanılmıştır. Genel hareketi, faz ilintisinde elde edilen birçok adaptif
ortalama yerel hareket ile kestirilmiştir. Faz ilintisinin yayılımı yerel hareket
vektörlerini belirlerken genel hareket bu yerel vektörlerin ortalamasından elde
edilmektedir. Her görüntü dilimindeki yerel vektör bir araya getirilerek mevcut görüntü
dilimindeki en uygun hareket vektörü hesaplanabilmektedir. Böylelikle kamera
titremelerine veya istenmeyen hareketlere bağlı durağan olmayan durumlar görüntüdeki
nesnenin hareketi ne olursa olsun düzeltilebilmektedir.
Faz ilintisi veya blok eşleştirme algoritmaları genellikle iyi sonuç vermekle birlikte,
görüntü içerisinde hareket eden nesneler sebebi ile özgün tanımlayıcı bloklar görüntü
dilimleri boyunca takip edilememektedir ve yanlış yönlendirmeler olabilmektedir.
Bosco vd. (2007) yayınladıkları çalışmada, Dinamik Zaman Eğrilmesi (DZE) (Dynamic
Time Warping (DTW)) tekniği kullanılarak görüntü dilimleri arasındaki genel hareket
kestirimi tekniğini sunmuşlardır. Bu yöntem, geçici eksen boyunca doğrusal hattı
korumak için eğrilme dizisini ve bunlar arasındaki açı benzerliğini kullanmaktadır. Bu
teknik, ışık değişimine ve hareketli nesnelere karşı dayanıklıdır.
5
Censi vd. (1999) tarafından yayınlanan çalışmada, görüntü içerisindeki özniteliklerin
takibi ile görüntü eğriltilerek kamera hareketleri dengelenmiştir. Hareketli nesnelerin
üstesinden gelebilmek için homografi tekniği uygulanmıştır. Buna ek olarak eğrilme
hesabının kullanılması öznitelik pozisyonlarının tahmininde daha güvenilir olmuştur.
Güllü vd. (2002) tarafından yayınlanan çalışmada, birbirine paralel olarak çalışan ve biri
diğerinin yönlendiricisi olarak kullanılan iki farklı Kalman Süzgeci’ne bağlı olarak
yapılan bulanık kontrol işlemi ile yeni bir Kalman Süzgeci katsayısı elde edilmiştir. Bu
yeni değer ile çalışan Kalman Süzgeci ile işlem gürültüsüne daha etkin bir adaptiflik
kazandırılarak Kalman Süzgeç’li sabitleme sisteminin daha verimli çalışması
sağlanmıştır. Bu kazanım, etkin bir sabitleme gerçekleştirilirken aynı zamanda kasıtlı
kamera hareketlerini de koruyan, gerçek zamanlı çalışan verimli bir görüntü sabitleme
sistemi sunmuştur.
Lowe (2004)’ün yayınladığı çalışmasında Ölçekten Bağımsız Öznitelik Dönüşümü
(ÖBÖD) (Scale Invaiant Feature Transform (SIFT)) tabanlı görüntü öznitelik belirleme
algoritmalarından yararlanan Yang vd. (2006) bu algoritmalardan elde edilen görüntü
hareket kestirimlerini Kalman Süzgeci ile bilinçli hareketlerden arındırarak daha düşük
hata ile sabitleme sağlayabilmişlerdir.
Battito vd. (2007) tarafından yayınlanan çalışmada, video görüntülerinden SIFT tabanlı
özniteliklerin belirlenmesi ve bu özniteliklerin takip edilmesi ile görüntü sabitlemesi
gerçekleştirilmektedir. Video görüntülerinden SIFT tekniği ile elde edilen özniteliklerin
eğrilmeleri hareket kestirimi hesaplaması için kullanılmaktadır. Kestirim hatalarının
önüne geçmek amacı ile değiştirilmiş Tekrarlayan En Küçük Kareler Tekniği (TEKKT)
(Iterative Least Square Method (ILSM)) adapte edilmiştir ve öznitelikler video
sabitlemesini sağlamak için bir sonraki görüntü dilimi ile takip edilmiştir. Bilinçli
kamera hareketleri Adaptif Hareket Vektörü Entegrasyonu (AHVE) (Adaptive Motion
Vector Integration (AMVI)) ile süzgece sokulmuştur.
Feng vd. (2009) basitleştirilmiş kutupsal örneklemeye dayanan, özellikle dönme,
ölçekleme ve eğrilme gibi hareket parametrelerinin doğru kestirilmesine yönelik, yeni
bağımsız
öznitelik
tanımlayıcıları
önerilmiştir.
6
Özniteliklerin
tanımlanmasında
kullanılan ve Lowe (2004)’ün önerdiği Gauss penceresinin merkezden dışa doğru
ağırlıklandırılması yöntemi yerine düzgün dağılım gösteren ağırlıklandırılmış pencere
yöntemini kullanmıştır. İntegral haritalama vasıtası ile gradyan yönelim histogramı daha
hızlı hesaplanarak verimlilik arttırılmıştır.
Hu vd. (2007) SIFT kullanarak bulduğu özniteliklerden faydalanarak yarattığı hareket
modelinde, bilinçli hareketi, istenmeyen hareketten ayırmak için iki farklı süzgeçleme
yöntemini bir arada kullanmıştır. Hareketin yumuşatılması için öncelikle Gauss
yumuşatması uygulanmış daha sonra Parabolik Yerleştirme Yöntemi (PYY) (Parabolic
Fitting Method (PFM)) uygulanarak hareket biraz daha yumuşatılmış ancak bilinçli
hareket kaybedilmemiştir.
7
2. KURAMSAL TEMELLER
2.1
Histogram
Histogram; görüntü seviyesinin frekans dağılımını ifade eder. Örneğin gri görüntü için
görüntü içerisinde her bir gri seviye değerine sahip kaç adet piksel olduğunu grafiksel
olarak gösterir. Görüntünün ne kadar karanlık veya aydınlık olduğunu tanımlamaya
yarar. Grafiğin dikey ekseni piksel sayısını, yatay ekseni ise gri değeri ifade ettiği
düşünülürse, 8 bit gri seviyeye sahip bir görüntüde, yatay eksen 0-255 arasında gri
seviye değerlerini dikey eksen de her bir gri seviyeden görüntü içerisinde kaç adet
olduğunu gösterir (Şekil 2.1). Şayet dikey eksendeki piksel sayıları toplanır ise
görüntünün barındırdığı toplam piksel sayısı öğrenilebilir. Bunun sebebi her pikselin bir
Piksel Sayısı
gri değere sahip olmasıdır.
Piksel Değeri
Şekil 2.1 Görüntü ve görüntüye ait gri histogram grafiği
2.2
Gradyan
Bir görüntünün gradyan’ı o görüntüdeki parlaklık değişiminin hangi yönde ve ne
büyüklükte olduğunu ifade eder. Gradyan büyüklüğü görüntüdeki parlaklık değişiminin
ne kadar çabuk olduğunu verirken yönelim vektörü de hangi yönde daha hızlı değişim
olduğunu gösterir.
8
Gradyan’ın yönelimi ve büyüklüğü olması sebebi ile bu bilgi vektör olarak ifade
edilebilir. Vektör boyu büyüklüğü, yönü ise gradyan yönelimini belirtir. Gradyan her
noktada farklı olacağından her nokta için farklı bir vektör ile tanımlanabilir.
Bazı kenar tanımlama algoritmaları veya öznitelik eşleştirme algoritmaları gradyan
vektörünü kullanmaktadır.
Gradyan vektörü noktası ile noktası arasındaki kısmi türevdir. Öyleyse; iki boyutlu
gri seviye bir görüntü için gradyan vektörü aşağıdaki gibi tanımlanabilir.
, , , , , tan , 2.3
(2.1)
(2.2)
Hareket Analizi
Durağan olmayan görüntünün bütünü, hareketli nesneler için tanımlanan hareket analizi
ile ifade edilebilir. Bunun sebebi görüntü bütününün aslında görüntü içerisinde hareket
eden bir nesne gibi algılanabilmesidir. Bu nedenle görüntünün durağan hale gelmesi
için gerekli olan analiz teknikleri aşağıdaki gibidir.
2.3.1 Görüntü kayması
Görüntü içerisinde nesnenin yer değiştirmesini ifade eder. Burada görüntünün yer
değiştirmesi iki eksende gerçekleşir. Herhangi bir dönme veya eğimlenme söz konusu
değildir (Şekil 2.2).
9
Öyleyse aşağıdaki formül ile ifade edilebilir.
(2.3)
Burada ve nesnenin ilk pozisyonunu ifade ederken ve ise
nesnenin ve kadar kayma gerçekleştikten sonraki yerini ifade etmektedir.
Şekil 2.2 ekseni ve ekseni boyunca ve kadar görüntü kayması
(Alharbi 2006)
2.3.2 Görüntü dönmesi
Dönme işlemi, görüntüleme aygıtının dönme eğiliminin görüntüye ters yönde etki
etmesi ile gerçekleşir. Dönme hareketi bir merkeze ve dönme açısına sahip olmak
zorundadır (Şekil 2.3). Bu nedenle dönme merkezi ve dönme açısı olmak üzere iki
değişken ile ifade edilebilir.
10
Şekil 2.3 Orijin merkezli dönme hareketi (Alharbi 2006)
Öyleyse görüntü dönmesinden elde edilen yeni nesne konumu dönme açısı olmak
sureti ile dönmeyi gerçekleştiren bütün noktalar aşağıdaki formül ile ifade edilebilir.
cos sin "sin cos (2.4)
2.3.3 Ölçek değişimi
Bir diğer hareket tipi de görüntü ölçek değişimidir. Görüntüleme aygıtının görüntünün
kaynak noktasına yakınlaşması veya uzaklaşması ile oluşan görüntüdeki büyüme veya
küçülmedir (Şekil 2.4). Aşağıdaki formül ile ifade edilebilir.
%
$0
0 ' (2.5)
ve görüntü alanının tüm koordinatını ifade ederken, ve ölçek
değişimi geçirmiş görüntü alanının yeni koordinatını ifade etmektedir. Şayet % ve
(1 ise yeni görüntü eskisinin büyümüş halini ifade ederken % ve )1 ise yeni
görüntü eskisinin küçülmüş halini ifade etmektedir. Şayet % ve negatif ise görüntü
11
aynı zamanda negatif ölçekleme değer ekseni yönünde dönme hareketi gerçekleştirmiş
demektir.
Şekil 2.4 Görüntü kaynak noktasına yakınlaşması ile oluşan görüntü büyümesi
(Alharbi 2006)
2.3.4 Görüntü eğrilmesi
Görüntünün açısal eğrilmesinden oluşan hareketi ifade eder. Görüntü her iki eksende de
eğrilme gösterebilir (Şekil 2.5) ve ekseni için eğrilme modeli formülü aşağıdaki
gibidir. Bu model’de ve eğrilme yönünü ise eğrilme açısını belirtir.
Öyleyse;
cos sin sin cos (2.6)
Şekil 2.5 ekseni ve ekseni yönünde kadar eğrilme hareketi (Alharbi 2006)
12
2.3.5 Hareket kestirim modeli
Durağan olmayan bir görüntünün hareket modeli, yalnızca yukarıdaki modeller ile
sınırlı olduğu varsayılır ise, görüntünün durağan hale getirilmesi için uygulanacak
düzeltme süreci aşağıdaki gibi olacaktır.
%
$0
0 cos ' sin sin cos cos sin "sin cos (2.7)
Bu formülde referans görüntünün noktasal yatay koordinatını, referans
görüntünün noktasal dikey koordinatını, yeni görüntünün noktasal yatay
koordinatını, yeni görüntünün noktasal dikey koordinatını, ve iki görüntü
arasındaki kayma miktarını, ve dönme ve eğrilme açılarını ise ölçek değişim
katsayısını vermektedir.
Öyleyse A dönme, eğrilme ve ölçek değişimi olduğu varsayılır ise
* şeklinde ifade edilebilir.
13
(2.8)
2.4
Laplacian Of Gaussian (LoG)
Laplacian of Gaussian; görüntüdeki hızlı yoğunluk değişimlerini ortaya çıkartır. Bu
hızlı değişim genellikle kenar bölgelerde olduğu için kenar algılamada kullanılır. LoG
gürültüye
duyarlı
olduğu
için
uygulanmadan
önce
görüntü
yumuşatma
algoritmalarından birisi kullanılmalıdır.
LoG uygulanmadan önce görüntünün Gauss çekirdeği ile katlama yapılarak
yumuşatılması sağlanır.
+, ,- 1
√21 23 4"
5
2 (2.9)
Öyleyse LoG operatörü aşağıdaki gibi tanımlanabilir.
∆7+, ,- 8-,-9 7∆+, ,-9 8 ,- :;+ 8 ,-
(2.10)
Katlama işlevinin birinci dereceden türevi aşağıdaki özelliği taşıdığı için;
(2.11)
<
<
<
<
7>= 8 =9 ? @>= " @<@ ? @ >= " @<@ = >=
<=
<=
<=
<=
Laplacian of Gaussian ∆+, ,- aşağıdaki gibi tanımlanarak görüntü ile katlama
işlemine sokulabilir.
A
A
A
A
A
A
+, ,- 2 % B /, " 2 % B /,
%
%
14
(2.12)
% A B A/,A
1 % A B A/,A " % A B A /,A
,
+
2
"
2
2
% ,
D
D
(2.13)
Aynı şekilde;
" % A B A/,A
,
+
2
,
D
(2.14)
Öyleyse LoG operatörü veya katlama çekirdeği aşağıdaki gibi ifade edilebilir.
(2.15)
" 2 % A B A /,A
:;+ E ∆+, ,- +, ,- +, ,- 2
D
2.5
Difference Of Gaussian (DoG)
Görüntüdeki kenar bölgelerinin ve diğer ayrıntıların ortaya çıkarılmasında kullanılır.
Benzer algoritmalar, yüksek frekans noktalarını açığa çıkartmaktadır. Rastgele gürültü
yüksek frekans içerdiğinden bu arzu edilen bir durum değildir. DoG, yüksek frekans
ayrıntılarını yok etmesi sebebiyle bu tür gürültüleri de yok edebilmektedir.
Görüntüye farklı çekirdekteki Gauss süzgecinin uygulanarak birbirinden çıkartılması ile
DoG çekirdeği elde edilebilir.
LoG’da olduğu gibi görüntü öncelikle Gauss çekirdeği uygulanarak yumuşatılmalıdır.
+,F ,- 1
G21
15
23 4"
5
2 (2.16)
için
H ,- +,F ,- 8 ,-
(2.17)
iken,
aynı şekilde farklı ölçek uzayı için;
H ,- +,A ,- 8 ,-
(2.18)
Farklı iki Gauss yumuşatmasına maruz kalmış görüntünün farkı o görüntü için kenar
algılamada kullanılabilir.
(2.19)
H ,- " H ,- +,F 8 ,- " +,A 8 ,- I+,F " +,A J 8 ,- K;+ 8 ,-
Öyleyse DoG operatörü veya katlama çekirdeği aşağıdaki gibidir.
K;+ E +1 " +2 1
1
1
A
A
A
A
A
A
$ - 2 % B /,F " - 2 % B /,A '
√21 1
2
16
(2.20)
2.6
Gauss Çekirdeği Ölçek Uzayı
Ölçek uzayı sinyallerin farklı ölçeklerde değerlendirilmesini tanımlamaktadır. En çok
uygulandığı alan iki boyutlu görüntülerdir. (2.16) eşitliği için farklı değerlerinde elde
edilen Gauss çekirdeği ile katlama işlemine sokulmuş aynı görüntünün çıktıları
aşağıdaki gibidir (Şekil 2.6).
1,00
2,01
4,03
8,06
16,12
32,25
Şekil 2.6 Farklı değerleri için ölçek uzayı
17
2.7
Ölçekten Bağımsız Öznitelik Dönüşümü (ÖBÖD)
Ölçekten Bağımsız Öznitelik Dönüşümü (ÖBÖD) (Scale Invariant Feature Transfor
(SIFT)), görüntüdeki özniteliklerin belirlenmesi ve eşleştirilmesinde kullanılmasından
ötürü görüntü işleme algoritmaları arasında önemli bir yere sahiptir.
Öznitelik
belirleme, robotik sistemlerde nesne tanımlama ve takip etme, fotoğrafçılıkta
mozaikleme gibi farklı birçok görüntü işleme uygulamasında kullanılabilir.
Lowe (2004) tarafında geliştirilen bu algoritma tek bir görüntü dilimini giriş olarak
almakta ve bu görüntü üzerindeki öznitelik bilgilerini vermektedir. Her öznitelik
noktası, konum, ölçek, yönelim ve tanımlama vektörü içermektedir. Tanımlama vektörü
ve tanımlanan nokta, bakış açısına, ışık değişimine ve ölçek değişimine bağımlı
değildir. Bu özellikler, hareketli görüntüler üzerinde çalışılabilmesi için oldukça
kullanışlıdır.
İyi bir yerel öznitelik aşağıdaki durumlara bağımlı olmamalıdır:
-Görüntüdeki gürültü
-Işık değişimi
-Ölçek değişikliği
-Dönme
-Bakış açısındaki önemsiz değişimler.
Öznitelik çıkarım yöntemi olan SIFT ve farklı iki görüntü dilimindeki bu özniteliklerin
eşleştirilmesi aşağıdaki gibi adımlandırılabilir.
-Ölçek uzayının oluşturulması ve bu ölçek uzaya ait her noktanın DoG kullanılarak
ölçek değişimi ve yönelime karşı bağımsız olası ilgi noktalarının bulunması.
-Her aday nokta için istikrarlı anahtar noktaların bulunması.
-Anahtar noktaların yerel gradyan yönelimleri göz önünde bulundurularak, bir veya
birden fazla yönelim atanması.
-Her anahtar noktanın, seçildiği ölçek alanı etrafındaki yerel gradyanları ölçülerek ışık
değişimlerine karşı bağımsızlık kazandırılması.
18
-Farklı iki görüntü arasındaki özniteliklerin birbirleri ile karşılaştırılarak en olası
eşleşmenin hesaplanması.
Bu özelliklere sahip özniteliklerin belirlenmesi için kullanılan yöntemler sırası ile
aşağıdaki gibidir.
2.7.1 Ölçek uzayı uç noktalarının bulunması
Ölçek değişiminden bağımsız anahtar noktaların bulunmasındaki ilk adım anahtar nokta
adaylarının konumlarının ve ait oldukları ölçeklerin bulunmasıdır. Bu işlem için ölçek
uzayında tanımlanmış her ölçek için istikrarlı noktaların konumları belirlenir.
noktaların
bulunmasında
kullanılacak
ölçek
uzayının
tanımlanması,
görüntünün, farklı değerlerinde elde edilen Gauss çekirdeği (2.16) eşitliği ile katlama
İstikrarlı
işlemine sokulması ile gerçekleştirilir (Eşitlik 2-17). İşlemde tanımlı ve değişkenleri
piksel koordinatlarını vermektedir.
Ölçek uzayındaki istikrarlı anahtar noktaların bulunması için; ölçek uzaydaki yan yana
farklı ölçekteki Gauss çekirdeği ile katlamaya girmiş görüntünün birbirinden (2.19)
eşitliğinde ifade edildiği gibi çıkartılarak (Şekil 2.8) kullanılması önerilmiştir (Lowe
(1999)). (2.19) eşitliğinde verilen ve arasındaki çarpım faktörü Q kadardır. Lowe
(2004) bu değerin 1’e yakınsaması teoride yaklaşım hatasının sıfıra ulaşmasını sağlasa
da pratikte Q √2 gibi bir değer için istikrarlı uç noktaların bulunmasında nerede ise
etkisinin olmadığı gözlenmiştir.
Öyleyse (2.19) eşitliğinde verilen ve sonraki her ölçek için Q √2 çarpım
faktörü kabul edilir ise Gauss çekirdeği ölçek uzayı standart sapma değeri her ölçek
için;
19
(2.21)
Q √2
R Q 2
…
Q I√2J
(2.22)
(2.23)
(2.24)
olur.
Ölçek uzayı, çarpım faktörü Q 2⁄S olacak şekilde her biri S+3 adet yumuşatılmış
görüntü içeren oktav adı verilen serilere ayrılır ve ikinci seri, ilk serinin 2’sı kadar alt
örneklenmiş ve yarı oranına indirgenen görüntü ile başlar ve her seri için bu işlem bir
önceki seri kullanılarak oktav sayısı kadar tekrarlanır (Şekil 2.7).
20
Şekil 2.7 Oktavların tanımlanması
21
Ölçek uzayı belirlenen görüntünün her oktavı için DoG hesaplanır (Şekil 2.8). Uç
noktalarının bulunması için, her bir DoG görüntüsünün kendi ölçeğinin her pikseli
çevresindeki 8 piksel ve komşu ölçeklerdeki 9’ar piksel olmak üzere toplamda 26 piksel
ile karşılaştırılır. Şayet piksel o bölgenin yerel maksimumu veya yerel minimumu ise
aday öznitelik olarak belirlenir (Şekil 2.9). Her piksele tek tek bakılması işlem sayısını
arttırıyormuş gibi gözükse de birkaç adım sonra çoğu örnek noktası elenmiş
olacağından işlem yükü azdır.
Her oktav için görüntü yarı oranına indirgendiğinden yerel maksimum veya yerel
minimum olarak tespit edilen anahtar nokta ve koordinatları bulunduğu oktav
indirgenme oranı ile çarpılarak kaydedilir. Aynı şekilde tespit edildiği ölçek değeri de
kaydedilmeden önce bulunduğu oktava göre hesaplanarak saklanmalıdır.
Şekil 2.8 Oktav bazında DoG’un hesaplanması
22
Ö
L
Ç
E
K
Şekil 2.9
2. Yerel maksimum ve minimumların bulunması
2.7.2 Anahtar noktaların yerleştirilmesi
tirilmesi ve dengeli noktaların seçimi
Bundan sonraki adım seçilen aday anahtar noktalarının kesin konum ve ölçek bilgisinin
detaylı olarak yerleştirilmesi
tirilmesi ve ana büküm oranının tespit edilmesidir. Bu bilgi kenar
boyunca sıralanmış noktaların ve gürültüye
gü
hassas düşük
şük kontrastlı
kontras
bölgelerin
elenmesine imkan verir.
Farklı oktav değerleri
erleri için bulunan yerel maksimum ve yerel minimumların konum ve
ölçek bilgileri oktav değerine
de erine göre oranlanarak aday öznitelik bilgileri elde edilmişti.
edilmi
Brown vd. (2002)’un
2002)’un geliştirdiğii yöntem ile örnek noktanın merkezlenmesi ile elde
edilen bu değerlerin,
erlerin, bu örnek noktaların 3D ikinci dereceden fonksiyona yerleştirilerek
yerle
hesaplanabileceğii bulunmuştur.
bulunmu
23
Bu yöntem, hesaplanan yerel maksimum ve yerel minimum noktalarının ve konum
bilgisi, ölçek bilgisi olmak üzere, K, , ölçek uzayı fonksiyonunun ikinci
türevinden Taylor serisini kullanır.
U , , V
(2.25)
örnek noktasından ofset olmak üzere;
K ve K’nin türevi örnek noktasından hesaplanabilir.
KV
1 K
KU K U UV U
U
2 U
(2.26)
W
Bu eşitliğin türevi, uç noktalarında sıfıra eşit olması gerekmektedir. Uç noktası U
eşitliğin sağ tarafının türevinin alınarak sıfıra eşitlenmesi ile bulunabilir.
K K
W
"
U
U U
(2.27)
Şayet ofset değeri herhangi bir boyutta 0,5’den büyük çıkar ise bunun anlamı uç
noktanın başka bir örnek noktaya yakın olmasıdır. Bu koşulda örnek noktanın yeri ofset
kadar değiştirilir ve işlem yeniden gerçekleştirilir. Yeni ofset değeri her boyut için de
0,5’den küçük ise bu ofset değer kadar kaydırılır ve anahtar noktanın gerçek konum ve
ölçek bilgisi elde edilir.
W değerinin (2.27) eşitliği, (2.26) eşitliğindeki yerine konularak
Uç noktalarda KU
hesaplanması ile düşük kontrastlı bölgelerdeki kararsız uç noktaların elenmesi
sağlanabilir.
1 KV
W K W
KU
U
2 U
24
(2.28)
|KU
W| değerinin 0,03’den küçük olduğu bütün uç noktalar elenebilir.
Pratik uygulama sonucu piksel değerlerinin [0,1] arasında olduğu durum için
Şekil 2.10’da bulunan tüm uç noktaların kararlı olmayan düşük kontrastlı olanları
elenmiştir. Bir sonraki adım ise kenar noktalardaki kararsız aday anahtar noktaların
elenmesidir.
DoG fonksiyonu yapısı gereği kenar boyunca güçlü tepkiye sahiptir. Bu sebeple bu
alanlarda kararlı olmayan anahtar noktaların oluşmasına sebep olabilmektedir. DoG
fonksiyonunda tanımlı zayıf tepe noktaları kenar boyunca geniş ana büküme sahiptir,
bunun yanında dik yönde bu daha ufaktır.
Özdeğerinin bahsedilen ana büküm ile orantılı olması sebebi ile 2x2 Hessian matrisi ana
bükümün hesaplanmasında kullanılır.
K%%
K
K
K
K% K
(2.29)
(2.30)
(2.31)
Aday anahtar noktanın bulunduğu koordinat ve ölçekteki DoG görüntüsünün türevleri
ve komşu örnek noktalarının farkı alınarak bulunmak üzere Hessian matrisi aşağıdaki
gibidir.
Y
$
K%%
K%
K%
'
K
(2.32)
Matrisin özdeğerinden çok, değersel oranından çıkarım yapılacağı için yalnızca oransal
olarak ilgilenmek yeterli olacaktır.
25
Öyleyse;
en büyük değerdeki özdeğeri
Z en küçük değerdeki özdeğeri ise
Y matris izi bu değerlerin toplamı, determinantı ise bu değerlerin çarpımı olarak
bulunur.
[\Y K%% K Z
K2=Y K%% K " IK% J Z
(2.33)
(2.34)
Determinantın negatif olması durumunda bükümün farklı işarete sahip olmasından ötürü
nokta elenir.
\
Z
(2.35)
olması durumunda, ayrı ayrı özdeğerleri yerine yalnızca oranlarına bağımlı eşitlik
aşağıdaki gibidir.
[\Y Z \Z Z \ 1
K2=Y
Z
\Z \
(2.36)
Özdeğerlerin eşit olduğu durumda \ 1 ⁄\ minimum değere sahiptir ve \ ile birlikte
artar. Öyleyse ana bükümün belli bir eşik değeri altındaki oranını bakmak yeterli
olacaktır.
[\Y \ 1
)
K2=Y
\
(2.37)
Şekil 2.10’da kenar bölgelerdeki aday anahtar noktalardan eşik değerin altındakiler
elenmiştir.
26
Şekil 2.10 Anahtar noktalarının elenmesi ile gerçek anahtar noktalarının tespiti
2.7.3 Yönelimlerin atanması
Her anahtar noktaya, yerel özelliklerine bağlı yönelim bilgisi atanabilirse görüntü
dönmelerine karşı bağımlılığı da ortadan kaldırılabilir. Her anahtar noktanın,
merkezinde kendisinin olduğu ve komşu pikseller ile gradyan yönelim bilgisi içerdiği
bir alanda olduğu düşünülürse, görüntüde oluşacak bir dönmenin sebep olduğu çevre
gradyan yönelimleri her bileşen için eşit dönmeye sahip olacaktır. Bu özellik
kullanılarak anahtar noktaların dönmeye karşı bağımsızlığı sağlanabilir.
Seçilen anahtar noktanın ölçek bilgisi kullanılarak elde edilen yumuşatılmış görüntü
anahtar noktanın yöneliminin hesaplanması için kullanılır. Böylece tüm hesaplamalar
ölçekten bağımsız şekilde gerçekleştirilmiş olur.
(2.17) eşitliğinden yola çıkarsak pikseller arasındaki farklılıktan gradyan büyüklüğü ve
yönelimi hesaplanabilir.
Öyleyse :, , , ölçekli yumuşatılmış görüntü, , gradyan büyüklüğü ve
, yönelim açısı olmak üzere (2.1) ve (2.2) eşitliğinden;
:, , +, , 8 , (2.38)
:, +, 8 , (2.39)
ölçek değerinden bağımsız durum göz önüne alınır ise
27
büyüklük değeri
(2.40)
, G: 1, " : " 1, :, 1 " :, " 1
yönelim açısı ise
, tan :, 1 " :, " 1
: 1, " : " 1, (2.41)
olarak tanımlanır.
Her biri diğerinden 10 derece açı farkına sahip olmak üzere 360 derecelik alanı
kapsayan 36 adet bin’den oluşan yönelim histogramı oluşturulur. Bu histogram anahtar
noktanın bulunduğu ölçek olan ’nın 1,5 katı kadar genişlikteki Gauss dairesel
penceresi içindeki örnek noktaların gradyan büyüklük değerinin eklenmesi ile
oluşturulur. Örneğin pencere içerisindeki pikselin yönelimine en yakın bin’in değerine o
pikselin gradyan büyüklüğü eklenir. Bu işlem pencere içerisindeki tüm pikseller için
uygulanır.
Oluşturulan histogram bir veya birden fazla tepe noktası içerebilir. En yüksek tepe
noktasına sahip bin yönelim açısı baskın değeri vermekle beraber, bu değerin
%80’inden büyük diğer tepe noktalarına sahip yönelimler kullanılarak aynı noktada
fakat farklı yönelime sahip anahtar noktalar oluşturulur. Bu durum yönelimin
kararsızlığına sebep oluyormuş gibi gözükmekle beraber eşleşme için anahtar noktanın
benzersiz bir yapıya kavuşmasını sağlayarak dengeyi sağlar. Çoklu yönelime sahip
anahtar noktalar, tüm anahtar noktaların %15’ini geçmez.
Son adım olarak tepe noktalarının ait olduğu yönelime daha hassas bir değer
sağlayabilmek için tepe noktasına en yakın histogram değerlerine ait yönelim açıları
interpole edilerek doğru bir yönelim açısı elde edilir.
28
2.7.4
Anahtar nokta tanımlayıcılarının tespiti
Her anahtar nokta için tanımlayıcıların belirlenmesi anahtar noktaların ışık değişimine
karşı bağımlı olmamasını sağlar. Anahtar noktanın bu bağımsızlığı elde etmesini
sağlamak için merkezi kendisi olmak üzere bulunduğu ölçek ile orantılı mesafedeki
çevre piksellerin görüntü gradyan büyüklükleri ve yönelim açısı belirlenir.
Merkeze uzak piksellerin sonuç değerine etki edecek yönelim ve gradyan büyüklük
hatalarının en aza indirilmesi için merkezden uzaklaştıkça oransal olarak etki
ağırlıklarının azaltılması ani değişimlere karşı vereceği tepkinin daha az hassas olmasını
sağlayacaktır. Bu ağırlık oranının hesaplanması için merkezi anahtar nokta olan Gauss
penceresi kullanılır. Pencerenin boyu tanımlayıcı penceresinin boyundan 1,5 kat daha
büyüktür. Pencere ağırlığı merkezden başlayarak düzgün şekilde dışa doğru
azalmaktadır.
Her anahtar nokta etrafında, 16x16 boyutunda örnekleme alanı kullanılarak birbirleri
arasında 45 derece açı farkı olan 8 yönelime sahip yönelim histogramı içeren 4x4
örnekleme alanı oluşturulur. Her okun yönelimi histogramın yönelim bilgisini
büyüklüğü ise gradyan büyüklüğünü ifade eder.
Her örnek noktasının ani değişimlerdeki sınır etkisini azaltarak 8 yönelime sahip
histograma olan etkisini düzgün şekilde dağıtmak için, üç boyutlu sistemlerdeki çevre
faktörlerinin
ağırlık
merkezine
etkisini
ifade
eden
üçlü-doğrusal
(tri-linear)
interpolasyon uygulanır. Burada amaç ağırlık merkezinin yerini bulmak yerine, her
örnek noktasının, anahtar noktasının sabit yerleşime sahip 4x4 örnek histogram
alanındaki 8 farklı yönelime olan ağırlığını dağıtmaktır. Burada, 4x4 örnek histogram
alanının merkezinden köşe noktaya olan mesafe 1 kabul edilir ve örnek alanın merkeze
olan uzaklığı da < alınır ise her örnek noktanın bu örnek alanın yerleşim eksenleri ve
yönelim açısının ağırlığı, örnek noktanın bu bileşenlerinin |1 " <| ile çarpılmasındna
elde edilir.
29
Sonuç olarak örnek noktaların, kendi bileşenlerinin, Gauss pencere ağırlığının ve
merkeze olan uzaklık ağırlığının oranına göre örnek histogram alanına etkisi
hesaplanarak 8 yönelime sahip örnek histogram alanı oluşturulur. Her biri 8 yönelimden
oluşan 4x4 histogram alanına sahip anahtar nokta 4x4x8=128 öznitelik vektörüne sahip
olur.
Işık değişiminin doğrusal olması halinde her piksel değerini aynı değişim katsayısı
kadar etkileyeceği için değişimdeki etki öznitelik vektörlerinin normalize edilmesi ile
giderilir. Histogram değeri piksellerin birbirleri arasındaki farkların ortaya konulması
mantığına dayandığı için ışık değişimi bu durumu etkilemez ve ışık değişiminden
bağımsız öznitelik elde edilmesini sağlar.
Görüntüleme cihazının doyuma girmesi veya üç boyutlu yüzeylerin farklı yönelmelerde
farklı değişimler göstermesi ışık değişiminin doğrusal olmamasına sebep olabilir. Bu
gibi
durumlarda
gradyan
büyüklüklerinde
yönelim
açılarına
nazaran
büyük
değişikliklere sebep olabilir. Bu durumu engellemek için 0,2 eşik değerine sahip
normalize vektörü uygulanır. Bu değer aynı üç boyutlu nesne için farklı ışık değerleri
altında uygulama yapılarak deneyimsel olarak bulunmuştur.
Şekil 2.11 Görüntü gradyanı ve anahtar nokta tanımlayıcılar (Lowe 2004)
30
2.8
Görüntü Özniteliği ve Öznitelik Eşleştirme
Farklı iki görüntüden elde edilen özniteliklerin eşleştirilmesi için özniteliklere ait
histogram yönelim vektörleri karşılaştırılır. İki özniteliğin vektörlerinin birbirine eşit
olması iki özniteliğin eşleştirilmesi anlamına gelse de bu durum çoğunlukla mümkün
olmamaktadır. Birbirine en yakın histogram yönelim vektörüne sahip iki özniteliği
eşleştirmek için Öklid mesafesine bakılmalıdır.
] vektör indeks sayısı;
3 , ^ vektörünün elementi;
ve
_ , ` vektörünün elementi olmak üzere;
<3, _ G3 " _ 3 " _ a 3 " _ <3, _ bc3 " _ (2.42)
(2.43)
d
] 1,2,3, … f dir
(2.44)
İki farklı görüntüden, referans görüntüsündeki öznitelik ile diğer görüntüdeki tüm
öznitelikler arasındaki Öklid mesafesine bakılır.
En yakın mesafeye sahip vektör ve en yakın ikinci mesafeye sahip olan vektör seçilir.
Bu iki mesafe karşılaştırılır. Şayet, en yakın mesafe, verilen eşik değeri kere diğer en
yakın mesafeden küçük ise iki vektör birbiri ile eşleşmiş kabul edilir. Aksi halde elenir.
Yukarıdaki üç adım referans görüntüdeki bütün vektörler için tekrarlanır. Aradaki
mesafenin sıfır çıkması durumunda mükemmel eşleşme bulunmuş demektir. En yakın
ve ikinci en yakın mesafe arasında eşik değeri kullanılmasını sebebi, yanlış eşleşmelerin
31
önüne geçmektir. Bu değer deneyimsel olarak 1,5 olarak hesaplamıştır (Lowe 2004).
Eşik değerinin arttırması elde edilecek eşleşme sayısını azaltmakla birlikte doğru
eşleşme oranını arttıracaktır.
Düşük yoğunluktaki öznitelik sayısında tablo yapılarak en yakın eşleştirme kolayca
bulunsa da yüksek yoğunluktaki yapılar için bu tür bir karşılaştırma verimli
olmayacaktır. Bu sebeple yüksek yoğunluktaki yapılarda arama yapabilmek için k-d
ağacı (k-d tree) algoritması (Cormen vd. 2001) farklılaştırılarak İlk En İyi Bin (İEİB)
(Best Bin First (BBF)) algoritmasını kullanılmıştır (Beis ve Lowe 1997).
k-d ağacı (Şekil 2.12) algoritması bulunduğu uzayın sürekli olarak farklı boyutlarda, o
boyutun elemanlarının ortalaması göz önünde bulundurularak ikiye bölünmesi ile
gerçekleştirilir. Örneğin iki boyutlu uzayda sırası ile ve eksenlerindeki elemanların
ortalamalarının alınarak bölütlenmesine dayanır.
a3,12, g5,3, h7,14, <9,8, 211,1, 19,15
iki boyutlu uzayın elemanları olmak üzere;
birinci basamak x ekseni için ortalama değer elemanı 9
ikinci basamak y sol kol için ortalama değer elemanı 12 sağ kol için 15
üçüncü basamak x sol kol için ortalama değer elemanı 5 sağ kol için 7
üçüncü basamak için x sol kol için ortalama değer elemanı 1 olmak üzere ağaç yapısı
aşağıdaki gibidir.
BBF algoritması k-d ağacı algoritmasının bazı özelliklerinin değiştirilmesi ile
oluşturulmuştur. Tarama yapılırken bulunması beklenen En Yakın Komşu (EYK)
(Nearest Neighbour (NN)) çoğunlukla aynı bin’dedir. Bulunan bu komşuya uzak
bölgeler elenerek işlem yükü azaltılır. Ancak bu durum çok boyutlu uzay için verimli
değildir.
Bir diğer işlem ise karşılaştırma için gezilecek eleman sayısının sınırlı tutulmasıdır.
32
<l, 8
ekseni
m3, no
g5,3
19, np
h17,14
211,1
ekseni
ekseni
Şekil 2.12 k-d ağacı uygulaması
2.9
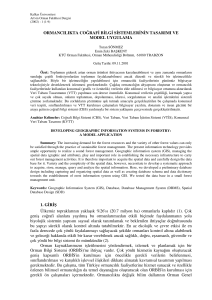
En Küçük Kareler Yöntemi (EKK)
Bir veri tablosuna en iyi uyan fonksiyonu bulma sürecine regresyon analizi denir. En
küçük kareler yöntemi regresyon analizinde kullanılan yöntemlerden en çok bilinenidir.
(Golayoğlu 2009).
Yapılan ölçümlerin doğası gereği,
k 1,2, … ] için
(2.45)
(2.46)
olacak biçimde bir fonksiyonun var olduğu, ölçümlerde yapılan hata nedeniyle bu
eşitliklerin bazıları veya hepsinin sağlanmadığı kabul edilebilir.
Bu düşünceyle, ölçülen değeri için yaklaşık değer kabul edilerek bu
yaklaşımdaki hatanın minimum olduğu fonksiyonu belirlenmeye çalışılır. Bu amacı
gerçekleştirmek için fonksiyonunun bir takım parametrelere bağlı bir ifadesi
bulunduğu varsayılıp eldeki veriler yardımıyla bu parametreler belirlenmeye çalışılır.
33
Örneğin, fonksiyonu
g
(2.47)
ifadesinde olduğu gibi bir doğrusal fonksiyon veya
m g h
(2.48)
ifadesinde olduğu gibi bir karesel fonksiyon olabilir ki bu durumda belirlenmesi
gereken parametreler m, g, h, dir.
değeri için yaklaşık değer, q , kabul edilince yapılan hata
" (2.49)
olarak verilir ve amaç, bu hatalar minimum olacak şekilde bir fonksiyonu bulmaktır.
EKK yönteminde aranan fonksiyon, ya da onun parametreleri, tüm artıkların kareleri
toplamı olan,
cI " J I " J a I " J
d
ifadesini minimum yapacak şekilde belirlenir.
34
(2.50)
Şekil 2.13 EKK yöntemi ile bulunan fonksiyon eğrisi (Golayoğlu 2009)
35
3. MATERYAL VE YÖNTEMLER
3.1
Materyal
Geliştirilen yöntemin uygulaması 2GHz Intel Core 2 Duo işlemci ve 4 GB 667 MHz
DDR2 SDRAM içeren ve üzerinde Mac OS X Ver. 10.5.8 işletim sistemi çalışan
Macbook bilgisayarda gerçekleştirilmiştir. Yöntem; Matlab R2008b ortamında
gerçeklenmiş ve Andrea Vedaldi tarafından geliştirilen SIFT ver. 0.9.12 algoritması
üzerine inşa edilmiştir.
Yöntemin uygulamasında kullanılan video görüntüleri Canon firmasına ait, aşamalı
(progressive) çekim yapabilen PowerShot G11 sayısal fotoğraf makinası ile
kaydedilmiştir. Kaydedilen video görüntüleri 320x240 piksel çözünürlüğe sahip, H.264
sıkıştırma biçiminde ve saniyede 30 film karesinden oluşmaktadır. Uygulamada
kullanılan farklı çözünürlükteki video görüntüleri 320x240 piksel çözünürlüğünde
kaydedilen görüntülerin, görüntü özelliklerini yitirmeden tıraşlanması ile elde
edilmiştir.
3.2
Yöntem
Görüntü sabitlemesi için kullanılacak yapı, görüntü içerisindeki her görüntü dilimine ait
öznitelik noktalarının belirlenmesi ve bu öznitelik noktalarının ardışık görüntü dilimleri
arasındaki yer değiştirmesinden elde edilen Yerel Hareket Vektörleri (YHV) yardımı ile
hareket kestirim modeline dayanmaktadır. Görüntü sabitlemesi için gerekli olan
öznitelik noktalarının dönme, eğrilme, ışık değişimi gibi özniteliklerin yönelimlerini ve
büyüklüklerini etkileyebilecek durumlar doğrudan hareket kestirimini etkileyeceği için
seçilecek özniteliklerin güvenilir olması gerekmektedir. Bu sebeple özniteliklerin tespiti
için yukarıdaki durumlara bağımlılığı bulunmayan öznitelikler yaratan SIFT algoritması
tercih edilmiştir.
36
Her görüntü dilimi için SIFT algoritması kullanılarak oluşturulan öznitelikler geçmişe
dönük görüntü dilimlerinin öznitelikleri ile karşılaştırılarak süreklilik arz eden
öznitelikler elde edilmesi için Geçmişe Bağlı Öznitelik (GBÖ) algoritması
kullanılmıştır. Bu algoritma, görüntüdeki istenmeyen hareketten ve anlık etkilerden
kaynaklanan ve bir önceki görüntü diliminde bulunmayan ve belki bir sonraki görüntü
diliminde de bulunmayacak özniteliklerin elenmesini sağlamaktır. Bu yöntem,
eşleştirme işleminde yanlış eşleşmeye sebep olacak ve yanlış YHV’lerin oluşumuna
sebep olacak öznitelikleri elemekle beraber takip edilmek istenilen nesne’nin merkezde
olduğu
düşünülürse
nesneye
ait
özniteliklerin
yoğunluğunun
arttırılmasında
kullanılmıştır.
Geçmişe bağımlı öznitelikler durağan olması istenilen merkez nesne üzerinde
yoğunlaşmış olsa da arka tarafta nesneden bağımsız hareketlerin geçmişe bağımlı
özniteliklere sahip olması, istenilen merkez sabitlemesine ait YHV’lerin dışında farklı
büyüklük ve yönelime sahip YHV’lerinin oluşmasına ve GHV’ün hesaplanmasında
hataya sebep olmaktadır. Daha önceki süzgeçleme ile YHV’lerinin yoğunluğunun
merkeze yakın bölgelerde arttırılması aynı zamanda sabitlemeye ait YHV’lerinin diğer
yönelim vektörlerine göre yoğunluğunun artması anlamına gelmesi sebebi ile
eşleştirmeden elde edilen YHV’leri yer değiştirme büyüklüklerine göre sıralanarak
yoğunluğu az olan vektör kümesi elenmiştir.
Benzer özelliklerdeki özniteliklerin yanlış eşleşmesi GHV’ünün hesaplanmasında
hataya sebep olacağı için eşleşme algoritmasında kullanılan Öklid mesafesi eşik değeri
arttırılarak yanlış eşleşmeler giderilmiştir ancak bu değerin, farklı özellikteki görüntüler
için değişkenlik arz ettiği gözlenmiştir. Çalışma içerisinde yapılan uygulamalarda, eşik
değeri deneysel olarak tespit edilmiş ve uygulanmıştır.
Sabit platform üzerindeki iki eksenli çevre gözetleme sistemlerinde istenmeyen
hareketlerin dışında sistemin yapısı gereği bilinçli hareketler de mevcuttur. Bu
hareketlerin istenmeyen hareketlerden ayrılarak görüntünün yöneliminin devam
ettirilmesi ancak istenmeyen hareketlerin de giderilmesi gerekmektedir. Kare
Ortalamalarının Karekökü (KOK) kullanılarak bilinçli hareket kestirimi yapılmıştır.
37
Sistem şeması özetle aşağıdaki gibidir.
GİRİŞ
Özniteliklerin ......
Belirlenmesi
Özniteliklerin
Belirlenmesi
Geçmişe Bağlı Özniteliklerin
Bulunması
f
Öznitelik Eşleştirme ve Güvenilir
YHV’lerin bulunması
Ara
Bellek
GHV’ünün Bulunması
......
Ara
Bellek
......
KOK ile Bilinçli Hareketlerden
Arındırma
Görüntü
Sabitleme
ÇIKIŞ
Şekil 3.1 Görüntü sabitleme algoritma adımları
38
Ara
Bellek
3.2.1 Geçmişe bağımlı öznitelikler
Her görüntü dilimine ait bağımsız özniteliklerin, ardışık görüntü dilimlerindeki
eşleşmeleri ile elde edilen özniteliklerin yer değiştirme bilgisi görüntünün bütününden
bağımsız ele alınabilir. Burada iki görüntü diliminden ilki referans olarak alınır ise
eşleştirilecek ikinci görüntüde, görüntünün hareketinden kaynaklanan yeni özniteliklerin
oluşması (yeni görüntü öğelerinin görüntüye girmesi) ve/veya eski özniteliklerin
kaybolması (eski görüntü öğelerinin görüntüden çıkması) olasıdır. Bu durum, iki
görüntü dilimi arasındaki eşleşmeye uygun öznitelik sayısını azaltmaktadır ve yanlış
eşleşmelere sebep olabilmektedir, yanlış eşleşen öznitelikler de hatalı YHV’lerin elde
edilmesine sebep olmaktadır.
İstenmeyen hareketlerin sebep olduğu yeni özniteliklerin ortaya çıkması ve/veya eski
özniteliklerin kaybolması çoğunlukla görüntünün kenarlara yakın bölgelerinde
gerçekleşmektedir (Şekil 3.2). Bunun sebebi, istenmeyen hareketin ardışık iki görüntü
dilimi arasındaki yer değiştirmeye etkisinin saniye bazındaki örnekleme sayısının
yoğunluğuna bağlı olarak az olmasıdır. Öyleyse iki görüntü dilimi arasında eşleşecek
özniteliklerin, referans görüntünün merkezine yakın özniteliklerden seçilmesi yanlış
eşleşen özniteliklerin elenmesinde kullanılabilir.
Bahsedilen eleme işleminde kullanılan yöntem aslında doğru eşleşmesi beklenen ortak
özniteliklerin alanının daraltılarak yoğunluğunun arttırılmasına dayanmaktadır, fakat bu
yöntem için kullanılması gereken alanın şeklinin ve büyüklüğünün, istenmeyen
hareketin belirsizliği sebebi ile hesaplanması oldukça zordur. Bu nedenle harekete göre
kendini adapte edebilen alanın şekli ve büyüklüğü belirlenerek doğru eşleşmesi kesin
öznitelikler elde edilebilir.
39
Şekil 3.2 Görüntünün yer değiştirmesi ile belirlenen ortak öznitelikler
Sistem yapısı gereği ardışık görüntü dilimlerinden oluşmaktadır ve görüntünün
sürekliliği düşünülürse her görüntü dilimi kendisinden önceki ve sonraki görüntü
dilimlerinden görüntü öğesi içermektedir. İşte bu görüntü dilimlerinin ortak kesişimi,
harekete bağlı oluşan yeni görüntü öğelerinin özniteliklerinden arınmış, geçmişe bağlı
süreklilik arz eden güvenilir özniteliklerin bulunduğu alanın tanımlanmasını sağlar
(Şekil 3.3). Bu alan hareketin yoğunluğuna göre kendi şekil ve büyüklüğünü adapte
eder.
40
Şekil 3.3 Hareketli görüntü ortak alanı
Önceki görüntü dilimlerinin özniteliklerinin, YHV’lerinin bulunması amacı ile
hesaplandığını düşünürsek, geçmişe bağımlı özniteliklerin bulunması için görüntü
dilimlerinin kesişim alanının tanımlanması yerine geçmişten gelen özniteliklerin
işlenecek görüntü dilimine kadar olan ortak paydası bulunarak ortak alan içerisinde
bulunan öznitelikler doğrudan elde edilmiştir (Şekil 3.4).
Şekil 3.4 Geçmişe bağımlı özniteliklerin bulunması
41
İşlenecek görüntü dilimi için kendisinden önceki bütün geçmiş görüntü dilimlerinin
ortak paydasını almak biriken her görüntü dilimi için fazladan eşleştirme ve eleme için
işlem yükü getirmekle beraber, geçmişten gelen her öznitelik bir önceki görüntü
diliminden elenerek geldiği için sayısı ortak paydanın alanının azalması ile azalmaktadır
ancak ortak paydanın kalmaması öznitelik sayısını sıfır yapar. Bu durum geçmişte
referans alınan ilk görüntü diliminin kapsadığı alanın dışına çıkıldığında gerçekleşir.
Bunun önüne geçmek ve görüntünün sürekliliğine bağlı olarak oluşacak yeni güvenilir
özniteliklerin de işleme katılmasını sağlamak için işlenecek görüntüden geriye doğru
belli sayıdaki görüntü dilimine ait öznitelikler hesaba katılmalıdır.
Öyleyse;
r , n. görüntü diliminin geçmişe bağlı süreklilik arz eden öznitelikler kümesi
s , n. görüntü dilimi öznitelikler kümesi
ve
N, geçmişe bağımlılık katsayısı (GBK) ise
r st u stB u stB u … s (3.1)
olarak tanımlanabilir.
vs , n. görüntü dilimi öznitelikler kümesinin eleman sayısı olmak üzere;
Bu karşılaştırmaya bağlı işlem yükü W;
w vst 8 vstB vst u stB 8 vstB (3.2)
vst u stB u stB 8 vstBR … vst u stB u stB u … s 8 vs dir.
Geçmişe bağlılık katsayısı, istenmeyen hareketin frekansı ve yer değiştirme miktarı ile
ilişkili olmakla birlikte, istenmeyen hareketin yansıdığı en basit platform olan el
kamerası ile yapılan görüntü kayıtları değerlendirilmiştir. Sonuç olarak el kamerası ile
çekilen görüntüler vücudun yumuşatma etkisinden ötürü mekanik platformlara ve
42
çevresel darbelere göre daha düşük frekanslı istenmeyen hareket üretmesi sebebi ile
üretilecek geçmişe bağlılık katsayısı bahsedilen platformları da doğruluk olarak
kapsayacaktır. Yine de işlem yükünün azaltılması için uygulanacak platformun
aşağıdakine benzer bir analizi yapılarak doğru sonuca varılabilir.
Çizelge 3.1 Farklı görüntülerin GBK ile öznitelik ilişkileri
1.Görüntü
2.Görüntü
3.Görüntü
4.Görüntü
Öznitelik Sayısı
Öznitelik Sayısı
Öznitelik Sayısı
Öznitelik Sayısı
1
719
598
161
262
2
514
351
101
159
3
382
254
73
120
4
314
200
45
75
5
275
175
39
55
6
250
160
33
45
7
229
150
33
39
8
198
144
28
30
9
174
135
24
25
10
156
133
22
22
11
142
125
22
18
12
134
121
21
17
13
127
118
16
15
14
125
114
14
13
15
124
111
14
13
16
123
102
14
13
17
120
96
14
13
18
116
91
14
13
19
113
88
13
13
20
109
83
13
13
GBK
43
’den elde edilen şekil 3.5’de, el kamerası ile çekilmişş durağan
dura
olmayan farklı
Çizelge 3.1’den
çözünürlüklerdeki dört farklı görüntüye ait 30. dilimlerinin geçmişe
geçmi bağımlı öznitelik
sayılarının, geçmişe
şe bağımlılık
ba
katsayısı ile ilişkisi gösterilmiştir.
800
700
Öznitelik Sayısı
600
500
400
300
200
100
0
1
2
3
4
5
6
7
8
9
10 11 12 13 14 15 16 17 18 19 20
Geçmişe Bağımlılık Katsayısı
1. Görüntü
2. Görüntü
3. Görüntü
4. Görüntü
Şekil 3.5
3. Farklı görüntülerin GBK ile öznitelik ilişkileri
iliş
Grafikten de gözlendiği
gözlendi gibi; geçmişe bağımlılık
ımlılık katsayısı ilk birkaç değerde
de
hızla
düşmekte
mekte daha sonra sabite yakın azalan bir eğri
e izlemektedir. Deneysel
eneysel olarak yapılan
çalışmalarda
malarda geçmişe bağımlılık
ba
katsayısı 8 olarak belirlenmiştir.
Geçmişe bağımlı özniteliklerin
niteliklerin tespitindeki bir diğer
di er önemli avantaj ise görüntünün
hareketinden bağımsı
ğımsız anlık ortaya çıkan etkenlerin (hızlıca bir cismin ortaya çıkıp
kaybolması, rüzgarın ağaç
a
dalına verdiğii hareket sebebi ile görüntüde beliren anlık
öznitelikler, küçük ölçek
ö
değişimlerinin sebep olduğuu anlık beliren öznitelikler vb.)
sistemin hafızalı yapıya sahip olması sebebi ile ortadan kaldırılabilmesidir.
Şekil 3.6’da aynı görüntü diliminden birincisinde geçmişe bağımlılık
ğımlılık katsayısı 1 alınmış
alınmı
(geçmişe bağımlılığı
ğı olmayan)
ol
diğerinde ise 8 alınarak öznitelikler geçmişe bağımlı
44
kılınmıştır. Elde edilen sonuç bahsi geçen tüm etkenlerden arınmış doğruluğu kesin ve
geçmişten gelen güvenilir özniteliklere sahip görüntü dilimidir.
(a)
(b)
Şekil 3.6.a. Geçmişe bağımlı olmayan, b. Geçmişe bağımlı olan öznitelikler
45
3.2.2 Eşleştirme eşik değeri ile güvenilir YHV’lerin bulunması
Bilinçli veya istenmeyen hareketlerin sebep olduğu, görüntü üzerindeki özniteliklerin
ardışık görüntü dilimlerinde yer değiştirmesi ile görüntüdeki genel hareketin
kestiriminin yapılabilmesi için birbiri ile doğru eşleşen özniteliklerin yer değiştirmesi
kullanılmıştır. Aslında bu eşleşme YHV’lerin yönünü ve büyüklüğünü vermektedir. İşte
bu YHV’ler yardımı ile görüntüdeki Genel Hareket Vektörü (GHV) bulunmuştur
(Şekil 3.7).
YHV
GHV
Şekil 3.7 YHV’den GHV’ünün tanımlanması
Görüntü’deki her YHV görüntü’nün genel yer değişimini vermeyecektir. Bunun sebebi;
birbirine yakın özelliklere sahip özniteliklerin bulunmasıdır. GHV tespiti için iki
görüntü dilimi arasındaki yakın özellikteki özniteliklerin yanlış eşleşmesinden elde
edilen bütün YHV’lerinin değerlendirilmesi yanlış yönelmelere sebep olmaktadır.
Bunun önüne geçmek için eşleştirme algoritmasındaki eşik değeri değiştirilerek
eşleştirme işlemi hassaslaştırılmış ve eşleştirme algoritmasından hemen sonra yanıltıcı
YHV’leri elenmiştir.
46
Eşleştirme algoritmasında, Öklid mesafesine bakılarak eşleştirilen öznitelikler için
kullanılan eşik değeri yanlış eşleşmelerin önüne geçmek üzere değiştirilebilir. Bu durum
eşleşen öznitelik sayısında değişikliğe sebep olacaktır. İki boyutlu uzayda hareket
kestirimi için bir çift doğru özniteliğin birbiri ile eşleşmesi yeterli olduğu göz önünde
bulundurulur ise doğru vektör yoğunluğuna ne kadar ulaşılırsa GHV doğruluğu da o
derece artmaktadır. Diğer taraftan eşik değerinin yükseltilmesi ile doğru eşleşen
özniteliklerin elenmesinden kaçınılmalıdır (Şekil 3.8).
Şekil 3.8 Eşleşme eşik değerinin arttırılması ile yanlış eşleşmelerin giderilmesi
Çizelge 3.2’de 210x110 piksellik bir görüntünün farklı Öklid mesafesi eşik değeri için
eşleşme sayıları ve hatalı eşleşme sayıları verilmiştir.
47
Çizelge 3.2 Eşleştirme eşik değerinin hatalı eşleşme üzerindeki etkisi
Eşik Değeri
1.5
1.7
1.9
2.1
2.3
2.5
2.7
2.9
3.1
3.3
3.5
3.6
3.7
Eşleşme
60
48
45
42
37
37
34
31
29
25
21
19
18
6
4
4
2
2
2
2
2
2
1
1
0
0
Hatalı
Eşleşme
Bölüm 2.3’de bahsi geçen hareket analizi süreci göz önüne alınır ise görüntünün genel
hareketi üç parametreye bağlıdır. Bunlar dönme, yakınlaştırma-uzaklaştırma (ölçek
değişimi), ekseni yönünde kayma ve ekseni yönünde kaymadır. Sabit platform
üzerinde sabit alanı gözleyen sistemlerde rüzgar, ani darbe vb dış etkenlerin sebep
olduğu hareketin veya iki eksenli çevre gözetleme sistemlerinde, eğrilme açısı, dönme
ve ölçek değişimi görüntünün tümü için geçerli olmadığı varsayılır ise (2.8)
eşitliğindeki * 1 kabul edilerek eşitlik aşağıdaki gibi düzenlenebilir.
(3.3)
Yukarıda bahsi geçen eleme tekniklerinden elde edilen öznitelikler, ardışık görüntü
dilimlerinde eşleştirilmiştir. Eşleşen özniteliklerin yer değiştirme miktarından ve
yönünden (3.3) eşitliğindeki ∆ ve ∆ değerleri elde edilmiştir. Referans görüntü ile
karşılaştırılan görüntü diliminin "∆ ve "∆ kadar kaydırılması ile iki görüntü üst üste
bindirilerek görüntünün sabitlenmesi sağlanmıştır.
Hareketin sürekliliği göz önünde bulundurulursa özellikle içerisinde hareket eden bir
nesnenin bulunmadığı görüntülerde neredeyse bütün hareket vektörlerinin yönelimi ve
büyüklüğünün birbirine eşit veya yakın olduğu gözlenmiştir. Ancak görüntü içerisinde
hareket eden nesne veya nesneler var ise hareket vektörlerinin yönelimleri ve
büyüklüklerinin farklı olduğu görülmüştür. Bu durum görüntü içerisinde takip edilen ve
görüntüde oldukça fazla oranda yer kaplayan nesnenin görüntülenmesinde gözlenmiştir.
Örneğin şekil 3.9.a.’da ilerleyen araba görüntülenirken sabitlenmesi gereken nesnenin
48
araba olduğu düşünülürse, arabanın sağında ve solunda yola ait olan öznitelikler,
hareket halindeki arabanın yol ile farklı bağıl hızlara sahip olması sebebi ile farklı yer
değiştirme göstermiştir.
Aynı şekilde, şekil 3.9.b.’de gösterildiği gibi gözlenmekte olan kavşaktaki hareket
halindeki minibüsün hareket halinde olması kavşaktaki görüntü sabitlemesine yanlış
yönelim bilgisi verecek farklı hareket vektörlerin oluşmasına sebep olmuştur.
(a)
(b)
Şekil 3.9.a.b. Farklı yönelim gösteren öznitelikler
Yönelim hatası veren bu vektörlerden kurtulmak için tüm hareket vektörleri bir tabloda
sıralanmış, birbirine yakın hareket vektörleri gruplanmıştır. Çoğunluk vektör grubu
tutularak geri kalan vektör grubu elenmiştir.
49
3.2.3 Bilinçli hareket kestrimi
Yukarıdaki süzgeçler kullanılarak elde edilen YHV’leri, GHV’ünün hesaplanması için
güvenilirdir. YHV’lerinin ve yönündeki yönelimlerinin ve büyüklüklerinin ayrı ayrı
ortalaması GHV’ünün yönelimini ve büyüklüğünü vermektedir. Yalnız bilinçli yapılan
hareketler ile titreşimlerden kaynaklanan istenmeyen hareketlerin birbirinden ayrılması
gereklidir. Bu ayrımı sağlamak için elde edilen güvenilir GHV’lerin ekseni yönündeki
yer değiştirme ve ekseni yönündeki yer değiştirme değerleri ayrı ayrı ele alınmıştır
(Şekil 3.10).
70
60
Yer Değiştirme
(Piksel)
50
40
30
20
10
0
0
20
40
60
80
100
120
Görüntü Dilimi
Şekil 3.10 Bilinçli hareket etrafındaki istenmeyen hareket eğrisi
Görüntü dilimleri arasındaki düzeltilmesi gereken hareketler yumuşak olmasa dahi bu
hareketler görüntüyü yönlendiren bilinçli hareketlerin çevresinde rastgele olarak
gerçekleştiği ve sinüzoidal bir yapıya benzediği varsayılır ise tahmini ortalama değer
Kare
Ortalamalarının
Karekökü
(KOK)
(“Root
Mean
Square”
(RMS))
ile
hesaplanmıştır.(3.4) eşitliği xy , ekseni yönünde kayma hareketlerinin KOK’unu
hesaplarken, (3.5) eşitliği xy , ekseni yönünde kayma hareketlerinin KOK’unu
hesaplamaktadır. ] değeri ise hesaba katılan parametre sayısını belirtmektedir.
50
xy xy
a ]
(3.4)
a ]
(3.5)
] 1,2, … f
(3.6)
KOK’dan elde edilen değerin güvenilirliğini arttırmak için her bir görüntü diliminin
öncesindeki ve sonrasındaki ]/2 mesafedeki görüntü dilimleri hesaba katılarak bulunan
değer o görüntü dilimine ait bilinçli hareketi temsil edecek şekilde göz önüne alınmıştır.
] değerinin tek sayılardan oluşması simetri açısından gereklidir ve 1’den büyük olması
koşulunda ortalama bir değerden bahsedilebilir.
Öyleyse yeni ] değerleri
] 3,5,7, … f
(3.7)
şeklindedir.
Bu durum giriş ve çıkış arasında ]/2*(görüntü dilimleri arasındaki süre) kadar bir
gecikmeye sebep olmuştur. ] değeri genişledikçe ortalama değere yaklaşılsa da
görüntüdeki gecikmeyi arttıracağından en uygun değer belirlenmelidir. Yumuşak
geçişlerin ve titremelerin yaşandığı bir durumda ani değişimler söz konusu olur ise ]
değerine adaptiflik kazandırılarak bu durum telafi edilebilir. Bilinçli hareket tespiti
sayesinde, istenmeyen hareketlerin düzeltmesi yapılırken bilinçli hareket hataları göz
önünde tutularak düzeltme gerçekleştirilmiştir.
51
Gerçekleştirilen uygulamada, 100 adet görüntü diliminden oluşan ve eksenin boyunca
-40/+150 aralığında yer değiştirme, ekseni boyunca ise 0/+130 aralığında yer
değiştirmeye sahip görüntünün grafiği şekil 3.11 ve şekil 3.12’de verilmiştir. Kırmızı
renk ile elde edilen eğri her görüntü diliminin, ilk görüntü dilimine karşılık gelen yer
değiştirme miktarını vermektedir ve bu yer değiştirme eğrisinden KOK için hesaba
katılan parametre sayısı 7 olarak alındığında 2 görüntü dilimi kadar gecikme ile
istenmeyen hareketin etrafında salınım yaptığı mavi renkli bilinçli hareket eğrisi elde
edilmiştir.
Öyleyse ekseni ve ekseni için elde edilecek YHV vektörünün büyüklüğü
:Yz% xy " (3.8)
ve
:Yz xy " (3.9)
dir.
Burada YHV’nin işareti yer değiştirmenin hangi tarafa doğru olacağını vermektedir.
Dikkat edilmesi gereken bir konu, xy ve xy değerlerinin işlemin yapısından ötürü
her zaman pozitif çıkmasıdır. Halbuki yönelime göre ve değerleri negatif tarafa
geçebilir. Bu sıfır geçiş hatasını ortadan kaldırmak için yer değiştirmenin hiçbir zaman
gerçekleşmeyeceği büyüklükte ofset eklenmiştir. Örnek verilen görüntü için bu ofset
değeri 100 piksel olarak alınmıştır. Burada elde edilmesi beklenen sonuç iki
parametrenin birbirine göre durumu olması sebebi ile her iki değişkene de eklenecek
ofset sonucu etkilemeyecektir.
52
Şekil 3.11 x ekseni için hareketin bütününden (kırmızı çizgi) bilinçli hareketin
(mavi çizgi) tespiti
Şekil 3.12 y ekseni için hareketin bütününden (kırmızı çizgi) bilinçli hareketin
(mavi çizgi) tespiti
53
4. BULGULAR
Görüntü serisindeki her görüntü dilimine ait bağımsız öznitelikler, SIFT algoritması
kullanılarak bulunmuştur. Bu öznitelikler eşleştirilerek ardışık görüntü serileri
arasındaki görüntünün yer değiştirme miktarı ve yönü hesaplanmıştır ancak görüntüdeki
her özniteliğin doğru eşleştirme gerçekleştiremediği gözlenmiştir. Bu durumun yer
değiştirme hesaplamasında kestirim hatasına sebep olduğu bulunmuştur.
Doğru eşleşmenin sağlanabileceği kararlı özniteliklerin bulunabilmesi için görüntü
dilimlerini bağımsız ele almak yerine geçmişe bağlı süreklilik arz eden öznitelikleri
ortaya çıkartan Geçmişe Bağımlı Öznitelik algoritması kullanılmıştır. Bu algoritma,
öznitelik noktaları çıkartılan görüntü diliminin geçmişteki görüntü dilimlerindeki
öznitelikler ile ortak paydasına ait özniteliklerin tutularak geri kalanların elenmesine
dayanmaktadır. Bu nedenle, elde edilecek geçmişe bağımlı öznitelik noktalarının,
görüntü diliminin kendisinden önceki görüntü dilimlerinde de bulunması gerekmektedir.
Görüntü dilimlerinde ortak paydanın bulunmaması geçmişe bağımlı öznitelik sayısını
sıfıra indirdiği gözlenmiştir. Bu durumun önüne geçmek için ortak paydanın aranacağı
görüntü dilimi sayısı sınırlandırılmıştır.
Yapılan deneyler neticesinde hareketli bir görüntüde en iyi sonucun 8 görüntü diliminde
alındığı bulunmuştur. Ayrıca bu eleme ile yalnızca hareketten kaynaklı oluşan veya
kaybolan öznitelikler elenmekle kalınmamış, bir cismin görüntüde anlık olarak
belirmesi veya rüzgar etkisi ile ağaç dallarının hareketinden oluşan geçici ve yanıltıcı
özniteliklerin de elenmesi sağlanmıştır.
Elde edilen geçmişe bağımlı öznitelikler kararlı yapıda olsa da birbirine benzer
özelliklere sahip özniteliklerin yanlış eşleştiği gözlemlenmiştir. Bu durumun önüne
geçmek için eşleştirme algoritmasında kullanılan Öklid eşik değeri arttırılarak benzer
özniteliklerin elenmesi sağlanmış ve yanlış eşleşmelerin önüne geçilmiştir ancak bu
değerin, farklı özellikteki görüntüler için değişkenlik arz ettiği gözlenmiştir. Çalışma
içerisinde yapılan uygulamalarda, eşik değeri deneysel olarak tespit edilmiş ve
54
uygulanmıştır. Görüntüleme aygıtının kullanılacağı ortama göre bu değer başlangıç
değişkeni şeklinde seçilebilir.
Durağan hale getirilmek istenilen görüntünün ilgilendiği ve görüntüde büyük yer
kaplayan nesne dışında kalan bölgelerdeki eşleşmelerin veya genel bir görüntüde yer
değiştiren küçük nesnelerin, eşleşme sonucu elde edilen yerel hareket vektörlerinde
farklı yönelmelere sebep olduğu gözlenmiştir. Bu durum genel hareket vektörünün
hesaplanmasında kullanılacak bu yönelmelerde hatalı sonuçlar doğurmaktadır. Bu ilgi
dışındaki yönelim vektörlerinin elenmesi için tüm yönelim vektörleri yönelim
büyüklüklerine göre gruplandırılmış ve yoğun grubun dışındaki vektörler elenmiştir.
Görüntüye yansıyan istenmeyen hareketin yanında bilinçli hareketlerin de varlığı söz
konusu olabilmektedir. Yüksek frekanslı istenmeyen hareketten alçak frekanslı bilinçli
hareketin ayırt edilebilmesi için KOK yöntemi kullanılarak bilinçli hareket kestirimi
yapılmıştır. Bilinçli ve istenmeyen hareketin tam olarak ayırt edilmesi mümkün
olmadığından düzeltme tam anlamı ile gerçekleştirilememiş fakat harekette yumuşama
gözlenmiştir.
Uygulamada kullanılan her bir görüntü diliminin işlenme süresi, görüntü diliminin
çözünürlüğüne ve bulunan öznitelik sayısına göre 0,5 ile 1,5 saniye arasında değiştiği
gözlenmiştir. Kullanılan uygulama araçları ile gerçek zamanlı durağanlık sağlanamamış
ancak görüntü serilerinin kayıt sonrası düzeltilmesinde sonuca ulaşılmıştır. Görüntü
serilerinin gerçek zamanlı düzeltilmesini olumsuz yönde etkileyen bir nokta da bilinçli
hareket tespitinde kullanılan KOK yönteminin yapısı gereği, hesaba katılan parametre
sayısının geleceğe bağlı bileşenler içermesidir. Bu geleceğe bağlı görüntü dilimi
bileşenleri, hesaba katılan parametre sayısı ve saniyedeki görüntü dilimi sayısına bağlı
olarak sabit bir düzeltme gecikmesi yaratmaktadır.
SIFT ile benzer yapıya sahip ve Bay vd. (2006) tarafından yayınlanan Hızlandırılmış
Güvenilir Öznitelikler (HGÖ) (Speeded-Up Robust Features (SURF)), güvenilir
özniteliklerin bulunmasında SIFT’e göre daha hızlı olduğunu kanıtlamıştır. SURF
algoritmasında, her görüntü dizisinden elde edilen farklı ölçeklerde süzgeçlenmiş
55
görüntü piramidi yerine, farklı ölçeklenerek oluşturulan süzgeç, sabit boyuttaki görüntü
dizilerine uygulanarak, her görüntü dizisi için ayrı bir işlem yapılmasına gerek
bırakmamış ve işlem yükünü azaltmıştır. Juan vd. (2009)’un çalışmasına göre SIFT’ten
elde edilen öznitelik sayısının daha fazla olması ölçek değişimine karşı daha güvenilir
bir yapı sergilemesine karşılık, SIFT ve SURF için doğru öznitelik eşleştirme oranı
oldukça yakındır. İki boyutlu uzayda hareket kestirimi için bir çift doğru özniteliğin
birbiri ile eşleşmesi yeterli olduğu ve ölçek değişiminin olmadığı göz önünde
bulundurulur ise SURF algoritması ile elde edilecek doğru eşleşmiş öznitelikler hareket
kestirimi için yeterli olacaktır. Böylece hareket dizilerinin durağanlığının gerçek
zamanlı sağlanmasına yaklaşılmış olacaktır.
Eşleşen özniteliklerin ölçek değerlerini de barındırdığını göz önünde bulundurursak,
eşleşen özniteliklerin ölçek bilgisi kullanılarak eşleşme neticesine karar verilebilir. Bu
bilgi, ardışık görüntü dilimleri arasında farklı ölçeklerdeki özniteliklerin eşleşme
esnasında elenmesinde ve böylece işlem yükünün azaltılmasında kullanılabilir.
Sabit platform üzerinde sabit alanı gözleyen sistemlerde rüzgar, ani darbe vb dış
etkenlerin sebep olduğu hareketin veya iki eksenli çevre gözetleme sistemlerinde, iki
eksenli yer değiştirme haricinde yaygın olarak kullanılan bir bileşen de yakınlaştırmauzaklaştırmadır. Bu değişkenin öznitelikler üzerindeki etkisi, özniteliklerin görüntü
diliminin merkezinden dışarıya doğru veya dışarıdan görüntü diliminin merkezine doğru
yer değiştirmesi şeklinde olacaktır. Yüksek hızlı yakınlaşma-uzaklaşma etkisi
görüntüleme aygıtının kendi hareketinden çok içerisindeki merceklerin kullanıcı
tarafından mekanik olarak hareket ettirilmesi ile sağlanacağı varsayılır ise, hareketin
hangi yönde ve hangi miktarda olduğu bilinmektedir. Bu değişim miktarı, özniteliklerin
yakınlaştırma-uzaklaştırma etkisinden ne şekilde etkileneceğinin hesaplanmasında
kullanılarak düzeltme yapılabilir.
56
5. TARTIŞMA VE SONUÇ
Battito vd. (2007) tarafından gerçekleştirilen çalışmada, doğruluğu kesin YHV’lerin
bulunması için gerçekleştirilen eleme süzgeçlerinin kesinliğinin geçmişe bağımlı
öznitelikler ile belirlenmesi yerine özniteliklerin doğrudan eşleştirilerek piksel
bazındaki yer değiştirmesindeki ilişki incelenmiştir. İlk adım olarak eşleşen
özniteliklerden elde edilen YHV’lerinden büyüklükleri çok fazla olanlar elenmiştir.
Daha sonra eşleşen her özniteliğin bir sonraki konumu EKK yöntemi kullanılarak
tahmin edilmiş ve farklı yönelim gösteren öznitelikler elenmiş ve yanlış eşleşmelerin
önüne geçilmiştir. Hareketin sürekliliği varsayılarak geçmiş YHV’leri ile yeni elde
edilen YHV’leri karşılaştırılmış ve süreklilik arz eden harekete sahip YHV’leri
haricindekiler elenmiştir.
Gerçekleştirilen deneysel uygulamalarda yüksek frekansa sahip istenmeyen hareketlerde
hareketin sürekliliğinin azaldığı ve hatta sürekliliğinin ortadan kalktığı, birbiri ile
ardışık görüntü dilimlerinde bile farklı yönelimlere sahip ancak doğru YHV’lerin ortaya
çıktığı görülmüştür. Bu koşullar altında hareketin sürekliliğinden bahsedilememekte ve
yukarıda bahsedilen algoritma ile bu hareket vektörleri de elenmektedir. Bu hareket
vektörlerinin elenmesi doğru yönelime sahip hareket vektörlerinin de yoğunluğunu
azaltarak ilgi dışındaki hareket vektörlerinin yoğunluğunu arttırmakta ve daha sonra
hesaplanacak hareket modelini yanıltmaktadır.
Diğer taraftan, geçmişe bağımlı özniteliklerin kullanılması ile hareketin sürekliliği
yerine o hareketi belirleyecek özniteliklerin sürekliliği kullanılarak hareketi sürekli
olmasa dahi doğru olduğu bilinen YHV’lerinin yoğunluğu korunmuştur.
Censi vd. (1999)’de benzer bir teknikle öznitelik noktalarının hareket kestirimini ardışık
görüntü dilimlerini kullanarak sağlamaya çalışmıştır. Bu yöntem ilk görüntü diliminin
kapsadığı alanın diğer görüntü dilimlerinde de var olduğu ve istenmeyen hareketin
Battito vd. (2007)’de olduğu gibi bir doğrusal sürekliği olduğu varsayımından hareket
edilmiştir. Bu varsayımlar ışığında kenar noktalardan belirlenen özniteliklerin daha
sonraki görüntü dilimlerindeki hareketleri Doğrusal Kalman Süzgeci kullanılarak
57
tahmin edilmiş ve takip edilmiştir. Bu işlem her özniteliğin tüm görüntü diliminde takip
edilmesi yerine, merkezi, referans alınan öznitelik olan ve belli bir yarıçapa sahip bir
alanda kestirim yapılmıştır. Bu yöntem uygulanabilir olmakla beraber yer değiştirme
büyüklüğünün fazla olduğu sistemlerde kestirim alanın yarıçapının arttırılması
gerektiğinden işlem yükü artacaktır ve geçmişe bağımlı öznitelikler tekniğinde olduğu
gibi yer değiştirme büyüklüğünden bağımsız bir uygulama gerçekleştirilemeyecektir.
Aynı zamanda, elde edilen özniteliklerin ışık değişimi, gürültü gibi koşullardan
etkilenmesi de algoritmanın güvenilirliğini azaltmaktadır. Görüntüdeki farklı yönelime
sahip nesnelerin bulunması ise doğru genel yönelimin ayırt edilmesini mümkün
kılmamaktadır.
Hu vd. (2007) SIFT algoritması kullanarak bulduğu öznitelikleri ile elde ettiği hareket
eğrisini yumuşatarak bilinçli hareketi korumak için iki farklı yumuşatma algoritması
kullanmıştır. Öncelikle Gauss fonksiyonu ile hareket eğrisini katlamaya sokarak
yumuşatmış daha sonra EKK yöntemine dayanan PYY uygulayarak bilinçli hareketi
kaybetmeden ikinci bir yumuşatma sağlamıştır.
Bu uygulama bir katlama ve bir kestirim modeli içermesi sebebi ile işlem yükü oldukça
fazladır. Ayrıca Gauss fonksiyonunun Gauss çekirdek değerinin arttırılması
yumuşatmayı arttırarak bilinçli hareketin kaybedilmesine sebep olmaktadır. KOK
yöntemi kullanılarak yapılan yumuşatma hesaba katılan örnek sayısına bağlı olarak
gecikmeye sebep olsa bile işlem yükü oldukça azdır (Çizelge 5.1). Ayrıca hareketin
frekansına göre adapte edilebilir yapıdadır.
Farklı çözünürlükteki görüntüler için görüntü düzeltme algoritması adımları işlem yükü
açısından incelendiğinde, SIFT algoritmasının diğer işlem adımlarına göre daha fazla
zaman aldığı görülmüştür (Çizelge 5.1). Bir diğer önemli nokta SIFT algoritması
sonucunda elde edilen öznitelik sayısı arttıkça GBÖ çıkarım işlem süresinin de
uzamasıdır. Bunun nedeni her görüntü dilimi için yapılan geçmişe dönük öznitelik
karşılaştırma sayısının (3.2) eşitliğinde verildiği gibi görüntü dilimlerindeki öznitelik
sayısı ile bağlantılı olmasıdır. Buradaki işlem yükünü azaltmak için GBÖ çıkarımından
önce yapılacak birtakım öznitelik elemeleri ile öznitelik sayısı azaltılabilir. Bu eleme
58
işlemi yerel maksimum ve yerel minimum bulma işlemlerindeki eşik değerinin
değiştirilmesi ile elde edilebilir.
Çizelge 5.1 Örnek görüntü dilimleri için işlem yükü dağılımı
Görüntü
Her
Çözünürlüğü
Görüntü
(Piksel)
Dilimi
ve
İçin
SIFT
GBÖ
Eşleşme
Her Görüntü
Ortalama
(%)
(%)
(%)
Dilimi İçin
Öznitelik
203
83,49
14,13
309
76,64
245
YHV’lerin
YHV’lerin
GHV’lerin
Hareketin
Bulunması
Elenmesi
Bulunması
Yumuşatılması
(%)
(%)
(%)
(%)
0,07
0,01
0,12
0,21
0,01
1,96
21,38
0,08
0,01
0,14
0,16
0,01
1,51
86,95
10,40
0,03
0,01
0,13
0,14
0,01
2,33
254
85,54
11,87
0,09
0,02
0,16
0,13
0,01
2,28
261
85,25
12,18
0,08
0,01
0,16
0,13
0,01
2,18
720
60,34
36,09
1,02
0,03
0,17
0,04
0,01
1,49
529
75,79
21,54
0,32
0,02
0,16
0,05
0,01
2,11
548
73,85
23,48
0,43
0,02
0,16
0,05
0,01
2,00
643
66,12
31,32
0,65
0,02
0,17
0,04
0,01
1,67
524
75,45
21,94
0,30
0,02
0,16
0,05
0,01
2,07
596
70,38
26,86
0,56
0,02
0,16
0,05
0,01
1,96
586
71,87
25,50
0,49
0,02
0,16
0,05
0,01
1,90
602
68,66
28,70
0,63
0,02
0,16
0,05
0,01
1,77
604
68,47
28,81
0,65
0,02
0,16
0,05
0,01
1,83
İşlem Süresi
Sayısı
(sn)
(Adet)
150x110
0,51 sn
150x110
0,63 sn
200x160
0,53 sn
200x160
0,54 sn
200x160
0,57 sn
310x230
1,43 sn
320x240
1,21 sn
320x240
1,24 sn
320x240
1,36 sn
320x240
1,14 sn
320x240
1,28 sn
320x240
1,31 sn
320x240
1,30 sn
320x240
1,34 sn
59
Düzeltme
(%)
Sonuç olarak; hareketli bir görüntüye ait her bir görüntü dilimindeki öznitelikler SIFT
algoritması kullanılarak bulunmuş ve bu özniteliklerin geçmişe bağımlı olmayanları
elenerek kararlı güvenilir öznitelikler elde edilmiştir. Daha sonra ardışık görüntü
dilimlerindeki kararlı öznitelikler eşleştirilmiştir. Eşleştirme algoritmasında kullanılan
Öklid mesafesi eşik değeri arttırılarak benzer özellikteki özniteliklerin yanlış
eşleşmesinin önüne geçilmiştir. Eşleşen özniteliklerden yerel yer değiştirmeyi veren
Yerel Hareket Vektörleri elde edilmiştir. Bu vektörler büyüklük ve yönelim
benzerliklerine göre gruplanarak az sayıdaki yanıltıcı vektörler elenmiştir. Kalan
YHV’lerinin ortalaması alınarak Genel Hareket Vektörü elde edilmiş ve bu vektör
yardımı ile görüntüde ters yönlü bir düzeltme sağlanmıştır. Tek noktayı gözlemleyen
sabit platformların aksine, iki eksenli çevre gözetleme sistemlerinde istenmeyen
hareketlerin haricindeki bilinçli hareketin kestirimi amacı ile KOK uygulanarak
hareketin yumuşatılması sağlanmış ve yüksek frekanslı yer değiştirmeler ortadan
kaldırılmıştır.
60
KAYNAKLAR
Alharbi, M. A. 2006. Departmant Of The Air Force Air University Air Force Institute
Of Technology Master Thesis. Wright-Patterson Air Force Base,
Battiato, S., Puglisi, G. and Bruna, A. R. 2008. A robust video stabilization system by
adaptive motion vector filtering. Multimedia and Expo, 2008 IEEE International
Conferance on Multimedia and Expo. pp. 373-376
Battiato, S., Gallo, G., Puglisi, G. and Scellato, S. 2007. SIFT features tracking for
video stabilization. 14th Int. Conf. on Image Analysis and Processing.
pp. 825-830
Bay, H., Tuytelaars. T. and Gool, V. L. 2006. Speeded-up robust features (SIFT). 9th
European Conferance on Computer Vision. Vol. 3951, pp. 404-417
Bayrak, S. ve Ulusoy, İ. 2009. Gerçek zamanlı görüntü sabitlemede birleşik yöntem.
SİU 2009
Beis, J.S. and Lowe, D.G. 1997. Shape indexing using approximate nearest-neighbour
search in high-dimensional spaces. IEEE Computer Society Conference on
Computer Vision and Pattern Recognition (CVPR'97) pp. 1000-1001.
Blair, B. and Murphy, C. 2007. Difference of Gaussian Scale-Space Pyramids
for SIFT1 Feature Detection. Final Project Report. Massachusets Institute of
Technology.
Bosco, A., Bruna, A., Battiato, S. and Bella, G.D. 2007. Video stabilization through
dynamic analysis of frames signatures. IEEE International Conference on
Consumer Electronics.
Brown, M. and Lowe, D. 2002. Invariant features from interest point groups. In British
Machine Vision Conference. pp. 656-665
Censi, A., Fusiello, A. and Roberto, V. 1999. Image stabilization by features tracking.
International Conference on Image Analysis and Processing. pp. 665-667
Cormen, T.H., Leiserson, C.E. and Rivest, R.L. 2001. Introduction to Algorithms
Second Edition, MIT Press and McGraw-Hill, Chapter 10.
Ertürk, S. and Dennis, T.J. 2000. Image Sequence Stabilization based on DFT filtering.
IEE Proc. Vision Image Signal Processing, Vol. 147, No. 2, pp. 95-101
61
Ertürk, S. 2003. Digital image stabilization with sub-image phase correlation based
global motion estimation. IEEE Transactions on Consumer Electronics, Vol. 49,
No. 4, pp. 1320-1325
Feng, H., Zhao, D. and Jiang, Z. 2009. Video stabilization based on modified invariant
feature. Optoelectronic Letters, Vol. 5, No. 6, pp. 464-467
Foroosh, H., Zerubia, J. and Berthod, M. 2002. Extension of phase correlation to
subpixel registration. IEEE Transactions on Image Processing, Vol. 11, No. 3,
pp. 188-200
Golayoğlu, A. 2009 Genel Matematik 2 Ders Notları. Başkent Üniversitesi,
http://www.baskent.edu.tr/~afet/dersler/genel_matematik_2/genel_matematik_a
nasayfa.htm
Güllü, M.K., Yaman, E. ve Ertürk, S. 2002. Bulanık denetleç uygulaması kullanılan
kalman süzgeci ile görüntü sabitleme. ELECO 2002
Hu, R., Shi, R., Shen, I. and Chen, W. 2007. Video stabilization using scale invariant
features. 11th International Conference Information Visualization. pp. 871-877
Juan, L. and Gwun, O. 2009. A coparison of SIFT, PCA-SIFT and SURF. Internetional
Journal of Image Processing. Vol. 3, pp. 143-152
Ko, S., Lee, S. J., and Kang, E. 1999. Fast digital image stabilizer based on gray-coded
bit plane matching. IEEE Transactions on Consumer Electronics, Vol. 45,
No.13, pp. 598-603
Kwon, O., Shin, J. and Paik, J. 2005. Video Stabilization Using Kalman Filter and
Phase Correlation Matching. Kamel, M. And Campilho A. (eds), ICIAR 2005,
LNCS 3656, pp. 141-148
Lowe, D.1999. Object recognition from local scale-invariant fetures. International
Conference on Computer Vision, Vol. 2, pp. 1150-1157
Lowe, D. 2004. Distinctive image features from scale-invariant keypoints. International
Journal of Computer Vision, Vol. 60, No. 2, pp. 91-110
Nulph, R.G. 2004. The end of shaky camera, http://www.videomaker.com/article/9999/.
Paik, J., Park, Y. and Kim, D. 1992. An adaptive motion decision system for digital
image stabilizer based on edge pattern matching. IEEE Transactions on
Consumer Electronics, Vol. 38, No. 3, pp. 607-615
62
Vella, F., Castorina, A., Massimo, M. and Messina, G. 2002. Digital image stabilization
by adaptive block motion vectors filtering. IEEE Transactions on Consumer
Electronics, Vol. 48, No. 13, pp. 796-801
Yang, J., Schonfeld, D., Chen, C. and Mohamed, M. 2006. Online video stabilization
based on particle filters. IEEE Inter. Conf. on Image Processing. pp. 1545-1548
63
ÖZGEÇMİŞ
Adı Soyadı
: Gürkan KOCADERE
Doğum Yeri
: Ankara
Doğum Tarihi : 13.01.1980
Medeni Hali
: Evli
Yabancı Dili
: İngilizce
Eğitim Durumu (Kurum ve Yıl)
Lise
: Özel Yüce Fen Lisesi (1994-1997)
Lisans
: Başkent Üniversitesi Elektrik Elektronik Mühendisliği
(1998-2003)
Yüksek Lisans : Ankara Üniversitesi Fen Bilimleri Enstitüsü
Elektronik Mühendisliği Anabilim Dalı (Temmuz 2010)
Çalıştığı Kurum/Kurumlar ve Yıl
Deka Digital Ltd. Şti. (2003-2006)
Novalit Elektronik İletişim Sanayi ve Ticaret A.Ş. (2006-2008)
Yüksel Savunma Sistemleri A.Ş. (2008--)
64