1
DOĞRU AKIM MOTORLARI VE
KARAKTERİSTİKLERİ
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Doğru Akım Motor Çeşitleri
• Motorlar; herhangi bir enerjiyi yararlı mekanik enerjiye dönüştürür.
• Doğru akım motoru, doğru akım elektrik enerjisini mekanik enerjiye dönüştüren
makinelerdir.
Doğru akım motorları Kutup Şekillerine göre iki çeşittir.
• Kalıcı (Daimi) mıknatıslı doğru akım motoru
• Alan Sargılı doğru akım motoru
Doğru akım motorları Uyartım Şekillerine göre üç çeşittir.
• Seri motor
• Şönt motor
• Kompunt motor
2
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
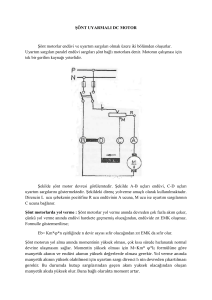
Şönt Motor
Şönt Motor
• Şönt motorda uyartım (alan) sargısı endüviye paralel olarak bağlanmıştır.
• Motorun uyartım sargıları çok sarımlı ve ince kesitli iletkenlerden yapılmıştır.
• Şönt motorun eşdeğer devresinde yolverme(başlatma) direnci endüvi devresine seri
olarak bağlıdır.
• Şönt alan sargısı kaynak gerilimine direk olarak bağlıdır.
• Uyartım akımının ayarlanması amacıyla uyartım devresine Rf direnci bağlanmıştır
Dış devre akımı
𝑰 = 𝑰𝒂 + 𝑰𝒎
Uyartım devresi toplam direnci 𝑹𝒎 = 𝑹𝒇 + 𝑹ş
Şönt motor eşdeğer devresi
ELP-13203 Elektrik Makineleri I
𝑼
𝑹𝒎
Uyartım akımı
𝑰𝒎 =
Zıt EMK
𝑬𝒃 = 𝑼 − 𝑰𝒂 𝑹𝒂
Endüvi akımı
𝑰𝒂 =
Öğr.Gör. Volkan ERDEMİR
𝑼−𝑬𝒃
𝑹𝒂
3
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Şönt Motor
Klemens Bağlantısı ve yol verme direnci ile Şönt motora yol verme
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
4
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Şönt Motor
• Motorda üretilen moment 𝑴 = 𝑲. 𝝓. 𝑰𝒂 olduğuna göre şönt sargıdan geçen akım sabit
olduğu sürece üretilen kutup akısı da sabit olacağından moment denklemi 𝑴 = 𝑲𝒇 . 𝑰𝒂
şekline gelir.
• Şönt motorda üretilen momentin endüvi akımıyla direk bağlantılı olur.
5
Yük akımı ile moment ve hız değişimi
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Şönt Motor Karakteristiği
• Şönt motor belirli bir yükü döndürmekte iken;
Üretilen zıt emk
𝑬𝒃 = 𝑼 − 𝑰𝒂 𝑹𝒂
Devir sayısı
𝒏=
𝑼−𝑰𝒂 .𝑹𝒂
𝑲.𝝓
Şönt motor yüklendikçe şu olaylar meydana gelir.
Endüvi akımı yüke bağlı olarak artar.
Endüvi direnci Ra üzerindeki gerilim düşümü Ia.Ra artar.
Sabit kaynak gerilimi için motorda üretilen zıt emk azalır.
Endüvi reaksiyonu ihmal edilirse akı sabit olduğu sürece zıt emk’ daki azalma
devir sayısını azaltır.
Motor yüklendikçe endüvi devresinde artan gerilim düşümü zıt emk’nin küçülmesi ve
dolayısıyla da devir sayısının düşmesine neden olmaktadır. Yük akımı ile artan endüvi
reaksiyonu ana kutup akısını azalttığı için devir sayısını da artırmaya çalışmaktadır. Bu
durumda motorun manyetik doyumuna ve endüvi reaksiyonundan dolayı hızdaki artış endüvi
akımından dolayı hızdaki azalmadan büyük, eşit ve küçük olabilir.
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
6
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Şönt Motor Özellikleri ve Kullanım Yerleri
Şönt Motorların Özellikleri ve Kullanıldıkları Yerler
• Şönt motorların yol alma anındaki momentleri yüksek değildir. Bu bakımdan aşırı
yüklerde kolay yol almazlar.
• Devir sayıları yük ile çok az bir değişme gösterir. Bu nedenle devir sayıları sabit kabul
edilebilir.
• Motor boşta çalışırken devir sayıları seri motorlarda olduğu gibi yüksek devirlere
çıkmaz. Ancak uyartım devresindeki bir kopukluk devir sayısının tehlikeli değerlere
çıkmasına sebep olabilir.
Şönt motorlar; vantilatör, aspiratör ve tulumbalarda, kağıt fabrikalarında, dokuma
tezgahlarında, gemi pervanelerinin döndürülmesinde, matbaa makinelerinde ve
elevatörlerde kullanılırlar.
7
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Seri Motor
Seri Motorlar
• Seri alan sargısının endüvi sargısına seri olarak bağlandığı doğru akım motorlarıdır.
• Endüvi akımının kontrol edilmesi amacıyla harici direnç devreye seri olarak
bağlanmıştır. Bu direnç motor anma hızına ulaştığında kısa devre edilerek devre dışı
bırakılır.
• Seri sargıdan devre akımı da geçtiğinden sargının sipir sayısı az, kesiti kalındır.
• Seri motorlarda endüvi akımı yük ile değişirken alan sargılarından geçerek manyetik
akıyı oluşturur.
Dış devre akımı
Zıt EMK
𝑰 = 𝑰𝒂 = 𝑰𝒔
𝑬𝒃 = 𝑼 − 𝑰𝒂 𝑹𝒂 − 𝑰𝒔 𝑹𝒔
Endüvi akımı
𝑰𝒂 =
𝑼−𝑬𝒃
𝑹𝒂 +𝑹𝒔
8
Seri motor eşdeğer devresi
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Seri Motor
Seri motor klemens bağlantısı
9
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Seri Motor Karakteristikleri
• Seri motorda üretilen zıt emk, 𝑬𝒃 = 𝑲. 𝝓. 𝒏 ve üretilen moment; 𝑴 = 𝑲. 𝝓. 𝑰𝒂 olur.
• Manyetik akı 𝝓 = 𝒌𝒇 . 𝑰𝒂 ‘dir.
• Seri motorlarda endüvi akımı artarken üretilen akı da artar. Akı miktarı arttıkça motor
doyuma yaklaşır. Motor doyuma ulaştığında endüvi akımına karşılık akıdaki artış çok
küçük olur.
• Seri motor boşta çalışırken üretilen moment sadece döner kayıpları karşılayacak
kadardır. Bundan dolayı boşta çalışan bir seri motorun endüvi akımı çok küçük olur.
Buna ilave olarak indüklenen zıt emk yaklaşık olarak uygulanan gerilim U ‘ya eşit
alınır.
• Boşta çalışan bir seri motorun zıt emk’ sının endüvi akımına bağlı olması ve endüvi
akımının da boşta çok küçük olması sebebiyle hız maksimum olur.
• Seri motorun momenti yüklendikçe artar ve artan moment motorun endüvi akımını
arttırır.
10
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Seri Motor
• Endüvi akımındaki artış endüvi devresi direnci üzerinde düşen gerilimi arttırır ve sabit bir
kaynaktan beslenen motorun zıt emk’sı azalır. Zıt emk endüvi akımına bağlı olduğundan
motorun devri düşer.
• Seri motor yüksek hızlarda düşük moment, düşük hızlarda yüksek moment üreten bir
doğru akım motorudur.
𝑬 𝒃 = 𝑼 − 𝑰𝒂 . 𝑹
𝑹 = 𝑹𝒂 + 𝑹𝒔 + 𝑹𝒂𝒙
𝒏=
𝑼−𝑰𝒂 .𝑹
𝑲.𝝓
Yük Akımına Bağlı Olarak Devir
Sayısı ve Moment Değişimi
11
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Seri Motor Özellikleri ve Kullanım Yerleri
Seri Motorların Özellikleri ve Kullanıldıkları Yerler
• Seri motorların yol alma momentleri çok yüksektir. Bu sebeple yük altında bile çok
yüksek bir döndürme momenti ile kalkınırlar.
• Devir sayıları yüke bağlı olarak çok geniş sınırlar içerisinde değişebilir. Yük arttıkça
devir sayısı azalır, yük azaldıkça devir sayısı artar.
• Seri motorlar yüksüz iken devir sayıları çok yükselerek motorun parçalanmasına
sebep olabilir. Bu sebeple seri motorların milinde çok küçük de olsa mutlaka bir yük
bulundurulmalıdır.
Seri motorlar yük altında yüksek döndürme momenti ile
taşımacılıkta; tren, tramvay, troleybüs, vinç, elevatörlerde kullanılırlar.
çalışabildiklerinden
12
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Kompund Motorlar
Kompunt Motorlar
• Kompunt motorların seri ve şönt olmak üzere iki uyartım sargısı bulunmaktadır.
• Seri sargı endüviye seri olup, şönt sargı alanını kuvvetlendirecek veya zayıflatacak
şekilde manyetik alan meydana getirir.
• Seri sargı alanı şönt sargı alanını kuvvetlendirecek şekilde bağlanırsa
eklemeli(arttırmalı) kompunt motor; seri sargı ters bağlı olup şönt sargı alanını
zayıflatacak şekilde bir manyetik alan oluşturuyorsa ters(azaltmalı) kompunt motor
olarak adlandırılır.
Dış devre akımı
𝑰 = 𝑰𝒂 + 𝑰𝒎
Uyartım devresi direnci 𝑹𝒎 = 𝑹𝒇 + 𝑹ş
𝑰𝒎 =
Zıt EMK
Endüvi akımı
𝑬𝒃 = 𝑼 − 𝑰𝒂 𝑹𝒂 − 𝑰𝒔 𝑹𝒔
𝑼−𝑬𝒃
𝑰𝒂 =
Kompunt motor eşdeğer devresi
ELP-13203 Elektrik Makineleri I
𝑼
𝑹𝒎
Uyartım akımı
Öğr.Gör. Volkan ERDEMİR
𝑹𝒂 −𝑹𝒔
13
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Kompund Motorlar Karakteristikleri
Klemens bağlantısı
ELP-13203 Elektrik Makineleri I
14
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Kompund Motorlar Karakteristikleri
Eğriden de görüldüğü gibi yük artıkça devir sayısının
değişmemesi için ters kompunt; yüke göre devir
sayısının azalması bir sakınca oluşturmuyorsa
eklemeli kompunt motor kullanılır.
Kompunt motorların devir sayısı motorun bağlantı şekline bağlıdır. Buna göre devir
sayısı;
𝒏=
𝑼−𝑰𝒂 (𝑹𝒂 +𝑹𝒔 )
𝑲.(𝝓ş +𝝓𝒔 )
Eklemeli kompunt
𝒏=
𝑼−𝑰𝒂 (𝑹𝒂 +𝑹𝒔 )
𝑲.(𝝓ş −𝝓𝒔 )
Ters kompunt
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
15
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Kompund Motor Özellikleri ve Kullanım Yerleri
Kompunt Motorların Özellikleri ve Kullanıldıkları Yerler
• Eklemeli kompunt motorların devir sayıları seri ve şönt motor arası bir değişim gösterir
yani sabit değildir. Ters kompuntta ise yükselen yada değişmeyen devir sayısı elde
edilebilir.
• Boş çalışmada devir sayıları normal devirlerinde olup tehlikeli olacak şekilde artmaz.
• Eklemeli kompunt motorların yol alma momentleri oldukça yüksektir. Ters kompunt
motorların yol alma momentleri zayıftır.
Eklemeli kompunt motorlar hemen hemen seri motor özelliği gösterirler. Bu nedenle
seri motorların kullanıldığı yerlerde örneğin; vinç, asansör ve hadde makinelerinde
kullanılırlar.
Ters kompunt motorlar ise fazla yol alma momenti istemeyen fakat yükle devir sayısı
hiç değişmemesi istenen sesli sinema makinelerinde, dokuma tezgahları ve buna benzer
yerlerde kullanılırlar.
16
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
17
Çeşitli Doğru Akım motorlarının moment-hız karakteristikleri
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARINDA DEVİR
YÖNÜNÜN DEĞİŞTİRİLMESİ
18
DOĞRU AKIM MOTORLARI – Doğru Akım Motorlarında Devir Yönünün Değiştirilmesi
Doğru akım motorlarında devir yönünün değiştirilmesi elektromıknatıslı (alan sargılı)
yada kalıcı (sabit) mıknatıslı olmasına göre değerlendirilir.
İçinden akım geçen iletkenin alan tarafından itilmesi ve iletkenin manyetik
alan içindeki durumu
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
19
DOĞRU AKIM MOTORLARI – Doğru Akım Motorlarında Devir Yönünün
Değiştirilmesi
Alan Sargısı Bulunduran Doğru Akım Motorları
• Doğru akım motorlarında uygulanan sol el kuralına göre, motorun devir yönü,
endüviden geçen akımın veya ana manyetik alanın yönüne bağlıdır.
• Bunlardan birinde değişme olursa motorun devir yönü değişir. Her ikisinin de
değiştirilmesi durumunda devir yönü değişmez.
• Buna göre alan sargısı bulunduran doğru akım motorlarının devir yönünün
değiştirilmesinde iki metot kullanılır.
Sadece endüvi sargılarının uçlarını yer değiştirmek
Sadece endüktör sargılarının uçlarını yer değiştirmek
NOT: Her iki alan sargısının uçları aynı anda değiştirildiğinde motorun devir yönü
değişmez.
20
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motorlarında Devir Yönünün Değiştirilmesi
Şönt motorların devir yönünün değiştirilmesi
ELP-13203 Elektrik Makineleri I
Seri motorların devir yönünün değiştirilmesi
21
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motorlarında Devir Yönünün Değiştirilmesi
Kompunt motorların devir yönünün değiştirilmesi
22
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Kalıcı Mıknatıslı Doğru Akım Motorlarında Devir Yönünün Değiştirilmesi
Kalıcı mıknatıslı doğru akım motorlarında sargılardan geçen akımın yönünün
değiştirilmesi için dört adet anahtarlama elemanı kullanılabilir. Şekildeki gibi yerleştirilmiş
olan S1, S2, S3 ve S4 anahtarlarının açık yada kapalı olması ile motordan iki yönlü akım
geçmesi sağlanır. S1 ile S4 kapalı, S2 ile S3 açık iken motor bir yönde dönerken; S1 ile S4
açık, S2 ile S3 kapalı iken motor bir yönde döner. S1 ile S3 kapalı yada S2 ile S4 kapalı iken
motor frenlenir. Burada gösterilmiş olan anahtarlar yerine transistörlü bir devre tasarlanarak
motorun her iki yönde de kontrolü sağlanabilir.
23
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Bu işlem için genelde H köprüsü kullanılır. Bir H-köprüsü bir elektronik devre bir yük
üzerinden her iki yönde de uygulanacak bir gerilim sağlar. Bu devrelerin sık kullanım alanları
robotik ve diğer uygulamalar ile DC motorların ileriye ve geriye doğru çalıştırmak için
kullanılırlar. H-köprü olarak entegre devreler mevcuttur, ya da ayrık bileşenlerinden
(transistörlerden) inşa edilebilir. Böyle bir uygulama için L298, TA7257P, L99H01,
LMD18245, gibi H-Köprü Entegreleri kullanılabilir.
24
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
25
DOĞRU AKIM MOTORLARININ DEVİR
SAYISI AYARI
DOĞRU AKIM MOTORLARI – Doğru Akım Motorlarında Devir Sayıs Ayarı
• Genel olarak bir doğru akım motorunun döner hızı uygulanan gerilim, momenti akım
ile orantılıdır.
• Hız kontrolü değişken kaynak gerilimi, direnç yada elektronik kontrol ile
gerçekleştirilebilir.
• Alan sargılı doğru akım motorunun yönü ya alan yada endüvi bağlantılarının
terslenmesi ile değiştirilebilir. Ama ikisi birlikte değiştirilirse motorun dönüş yönü
değişmez. Bu işlem yaygın olarak devre açıcılarının özel ayarlanması ile yapılır.
• Etkin gerilim, seri olarak bağlanmış dirençler yada tristör, transistörlerden yapılmış
elektronik olarak kontrol edilen anahtarlama devreleri ile değiştirilebilir.
• Doğru akım motorlarında devir sayısı formülü
𝒏=
𝑼−𝑰𝒂 .𝑹𝒂
𝑲.𝝓
‘dir.
26
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
Doğru akım motoruna ait hız-moment ilişkisini gösteren denkleme göre bir doğru akım
motorunun hız kontrolü genel olarak aşağıdaki yöntemlerden biri kullanılarak yapılabilir.
Motora uygulanan gerilimin genliği değiştirmek,
Alan sargısının manyetik alanı değiştirmek,
Endüvi devresine direnç ilave etmek.
• Bu yöntemler içerisinde en çok kullanılanı gerilimin ayarlanmasıyla gerçekleştirilen
hız kontrol yöntemidir.
• Ayarlı doğru gerilim yardımıyla yapılan hız kontrol yönteminde elde edilen hızmoment karakteristiklerinin eğimi değişmezken hız sıfırdan anma hızına kadar
ayarlanabilmektedir.
27
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
DOĞRU AKIM MOTORLARI – Doğru Akım Motoru Çeşitleri
• Endüvi devresine bağlanacak olan ayarlı bir direnç vasıtasıyla gerçekleştirilecek olan
yöntemde ise, kullanılan direnç ile bir gerilim bölücü devre meydana getirilmektedir. Bu
nedenle gerilimin bir kısmı ayarlı direnç üzerinde düşeceğinden motor endüvisine genliği
değişmiş bir gerilim uygulanmış ve böylelikle motor hızı ayarlanmış olur. Bu yöntem, ucuz
ve basit bir yöntem olmasına rağmen seri bağlanacak olan dirençte bakır kayıpları
meydana gelmesi, direnç değeri arttıkça hız-moment eğrisinin eğiminin artması gibi bazı
sakıncaları bulunmaktadır.
• Alan sargısının manyetik alanının değiştirilmesi yönteminde endüviye uygulanan gerilim
sabit kalırken uyartım devresine bağlanan seri direnç yardımıyla uyartım akımı ayarlanır.
Sadece alan sargısının oluşturduğu manyetik alan değiştirilerek motorun hız kontrolü
yapılacak olursa, motorun hızı ancak anma hızın üzerinde bazı hız değerlerine
ayarlanabilir.
28
ELP-13203 Elektrik Makineleri I
Öğr.Gör. Volkan ERDEMİR
KAYNAKLAR
•
•
•
•
•
OĞUZ, Necati; GÖKKAYA, Muhittin; Elektrik Makineleri I, MEB Yayınları, 1992
PEŞİNT, M.Adnan; ÜRKMEZ, Abdullah; Elektrik Makineleri II, MEB Yayınları, 1992
BAL, Güngör; Doğru Akım Makineleri ve Sürücüleri, Seçkin Yayıncılık, Ağustos 2001
ALTUNSAÇLI, Adem; Elektrik Makineleri I, 2010
www.wikipedia.org
29