Genel robot kuralları
Bir robotta tüm basit sistemler bulunmak zorundadır.Oyunun bir
parçası olmak için güç, iletişim, kontrol ve hareket fonksiyonları
olmalıdır.Robot first strongholdda yarışmak için dizayn edilmiş
olmalı
Robotun tampon alanı içerisinde bir şase çevresi bulunmalıdır.
Bu bölge içerisinde robotun sabit,eklemsiz ve hareket etmeyen
bölgeleri bulunmalıdır.635milimetreden küçük olan çıkıntılar
(örn:somun kafaları,sabitleyici uçları ve benzeri)şase çevresinin
bir parçası kabul edilmemektedir.
A: Robotun şase çevresinin toplam uzunluğu 304.8 santimetreyi
aşmamalıdır.
B: Robotun tamamı şase çevresinden 38.1 santimetreden daha
uzakta parça bulundurmamalıdır.
C: Robotun BAŞLANGIÇ konfigürasyon* boyu 137.16
santimetreyi aşmamalıdır. (G17 sayesinde robot maç
içerisindeyken bu yükseklik sınırını aşabilir)
Başlangıç konfigürasyonunda* robotun herhangi bir parçası
robot şasesinin dikey sınırlarının dışına çıkmamalıdır.(yukarıda
açıklanan küçük çıkıntılar haricinde)
*başlangıç konfigürasyonu: robotun maç başlangıcındaki
duruşu
Robotun ağırlığı 54.43 kilogramı geçmemelidir, ağırlık ölçümü
sırasında robotun tüm parçaları ve farklı konfigürasyonlarda
kulanılıcak mekanizmaları da birlikte ölçülmektedir.
Hareket cihazları sahaya zarar verecekmateryeller
içermemelidir (örn: set plastik,metal,zımpara kağıdı,metal dişler
vb.)
Robotlar kapalı durumdayken üstünden saha parçaları ve toplar
alınabilmeli.
Güvenlik ve hasar önlemi
Rbotun küçük çıkıntıları saha elementlerine veya insanlara
zarar verme ihtimasline sahip olmamlı
Robot zararlı materyallerden üretilmemelidir veya diğer
robotların çalışmasını önlememlidir
Bütçe sınırlaması
Robotta bulunan tüm itemler 4 bin doları geçmemelidir.
Kit itemleri ve 5 dolardan ucuz parçalar bu sınırlamadan
etkilenmemktedir.
Bireysel olmayan ve kit itemi olmayan parçalar 400 dolardan
pahalı olmalıdır. Toplu item alınıyor ise toplam fiyat 400 doları
geçebilir,ancak bu hiç bi bireysel parça 400 doları ngeçmiyor ise
geçerlidir
Bir itemin fiyat belgeleme çizelgesi fiyatı market fiyatı ve işçiliğe
göre hesplanmalıdır, takım üyelerinin işçiliği, diğer takımların
üyelerinin işçiliği ve etkinliğin sağladığı atölye işçilikleri
sayılmamktadır. (takımın üyesi olan sponsor çalışanlarıda
dahildir)
kickofftan önce üretilen fiziksel parçalara izin verilmemektedir.
İstisnalar içerisinde:operatör konsolu,tamponlar,batarya montajı
ve motor gibi itemler bulunmaktadır.
Yazılım ve elektronik/mekanik dizaynlar eğer kikckofftan önce
kaynak dosyaları halka açık ise kullanıma izin verilir.
Robotun diğer konfigürasyonları için kullanılıcak olan itemler
dahil tüm roıbot parçaları mühürlü bir şekilde paketlenmelidir.
11:59 lokal saatinde 23 şubat 2016 tarihine kadar olmadlıdır.
Robotu bitirme günüdür.
Takımlşar şu zamanlarda paketlenmiş robot elementlerine
dokunmamalıdır:
İnşa bnitiş ve etkinlik başlangıç zamanı arasında
Kendi etkinlik periyodları arasında
Katıldıklaır etkinliklerin pit saatleri dışında
Şu zamanlarda ek zaman tanınmaktadır.
Kickofftan sonra, yazılım geliştirmesi konusunda zaman
kısıtlaması yoktur
Etkinliğe katılmadıklşarı günlerde, 18. Kuraldaki itemler ve 18.
Kuraldan muaf olan itemlerin geliştirilmesi serbesttir, robot ile
arabirim açılmadığı sürece.
2 günlük etkinliğe katılan takımlar
Materyel kullanmı
K17:kayganlaştırıcılar sadece robotun iç parçalarında
kullanılabilir, arena veya diğer robotlara bulaşmamalıdırlar.
K18:bir etkinlikte, takımlar 13.60 kg nin altında olduğu sürece
paketlenmemiş fabrikasyon eşyalarını robotlerını geliştirmek
veya tamir etmek için kulanabilir, aynı anda diğer takımlardan
izin alarak onların parçalarınıda kullanabilir. Bu eşyalar sadece
mekana robolta beraber takımk gelirken getirilebilir ve robotun
ağırlık ölçününde tartılmazlar.
2 günlük etkinliklere katılan takımlar için bu eşyalar robot erişim
periyodunda getirilebilir ama yinede total ağırlık 13.60 kg yi
heçmemelidir. Robot erişim periyodunda üretilmiş ve robotla
beraber paketlenmiş olan itemler bu sınırlamadan muaftır.
Bu limitten muraf olan itemler operatör konsolu ve batarya
montajlarıdır.
TAMPON KURALLARI
K19: robotları ramponlar ile robotun çerçeve çevresinin rüm dış
köşelerini korumalıdır. Optimal koruma için bir kenarda en az
20.32 cmm tampon bulunmalıdır. Eğer bi kenar 20.32 cm dewn
kısa ise o kenarın tamamı tampon ile korunmalıdır. Robbot
yvarlak bir kenar buluduruyor ise, o kenar sınırsız köşe
bulunduruyor olarak sayılır.
K20:Her tampon seti, (her çeşit sabitlyici veya robot ile tamponu
birbirine bağlayan yapı dahil) toplam 9.07 kg yi geçmemelidir.
K21: Tamponlar şu şekilde yapılmalıdır.
A: en az 1.9 cm derinliğine ve 12.7 cm yüksekliğinde kontrplak
veya başka katı,güçlü bir tahta ile desteklenmelidir. Tahta
materyalde küçük açıklıklar ve etkileşim deliklerine izin
verilmektedir, tamponun tamponun yapısal dayanıklılığını
etkilemedikleri sürece.
B: 21:A,E,F ve G alt kurallarında katı parçalar şasi çevresinden
2.54 cm den fazla dışarı çıkmadıkları sürece kullanılabilir, bu
sınırlamaya küçük çıkıntılar girmez.
C:darbe emici olarak tamnponda en az 6.35 cm çapında
dairesel,altıgen veya taçyaprağı şeklinde bir çift “havuz
makarnası” (katı veya içi boş) parçalar darbe emişi için
kullanılabilir. Robotta kullanılan tüm havuz makarnaları aynı
çapa, enine kesite ve yoğunluğa sahip olmalıdır. Darbe emici
materyel tahta materyelden maksimum 6.35 cm ye kadar
uzanabilir. Kumaş kaplamaya yardımcı olmak n için darbe emici
materyeldi tahtaya sabitlemek için yumuşak sabitleyiciler
kullanılabilir, darbe emi,cinin şekillerini aşırı derecede
değiştirmedikleri sürece (örn, bantın darbe emiciyi sıkıp
bükmesi)
D: tampon dayanıklı,ve prpzsüz bir kumaş ile
kaplanmalıdır.(birdan fazla kumaş katmanı ve dikişler kabul
edilmektedir, 27. Kurala uymak için gerekiyorsa, tabiki ddarbe
emicinin şekli aşırı derecede bozulmadığı sürece)
Tampondaki kumaş kaplama tamponun tüm tahta ve yumuşak
parçalarını kaplamalı, ve düz kırmızı veya mavi renkte olmalıdır,
üstlerindeki tek işaretler takım numarası olabilir.
E:isteğe bağlı olarak köşeleri birbirine sabitlemek içim aluminum
materyel (zımba, vida) kullanılabilir.
F:tamponları birbirine bağlamak için aluminum dirsekler (açılı
veya metal levha) kullanılabilir.
G:Tampon şasi çevresine güçlü bir sabitleme sistemi ile sıkı ve
dayanıklı bir bağlantı kurmalıdır. (örn: bantla üstünden
geçilmemeli, veya kablo bağı kullanılmamalıdır.)sabitleme
sistemi şiddetli darbelere dayanacak şekilde üretilmelidir. Tüm
çıkarılabilir sabitleyiciler (cıvata,kilitleme pinleri) tamponun bir
parçası sayılır.
K22: Tampon,tampon bölgesinin içinde bulunmalıdır(tampon
bölgesi şase çevresinin 10 cm dışını kaplayan hacim)
K23:Tamponlar eklemli olmamalıdır (Şase çevresine göre)
K24:Tamponun köşe bağlantıları havuz makarnası materyali ile
doldurulmalıdır.Veya yumuşak materyal ile
K25:Tüm tampon (sadece kaplama değil)hızlı ve kolay bir
kurulum ve çıkarmaya sahip olacak şekilde dizayn
edilmeli,inceleme ve tartmak için
K26:Tamponlar robot çerçevesi tarafından
desteklenmeli.Desteklenmiş sayılmaları için tamponun
sonlarının minimum 1.2 cmi şase çevresi değmelidir.
Ek olarak tüm tahta parça ve şase arasındaki her boşluk
0.6 cmden derin olmamalı ve 20 cmden geniş olmamalıdır.
K27:Tüm robotlar kırmızı veya mavi tamponlarını ittifak
renklerine uyacak şekilde göstermelidir.
K28:Takım numaraları sahanın her tarafından görülebilecek bir
şekilde tamponlarda yazılmalıdır.
A: Takım numaraları En az 10 cm yüksekliğinde en az 1.2 cm
puntoya sahip ve ya beyaz renge veya beyaz dış kaplamaya
sahip olmalıdır.
B:160 dereceden az açıya sahip köşelerden geçmemelidir.
Motor VE AKTÜATÖRLER
K29:Aşağıdaki çizelgede 2016 FIRST Robotics Competition
robotlarının kullanabileceği motor ve aktüatörler:
Kit de verilen parçalar da dahildir.
PWM COTS servos
K30:integral mekanik parçalar ve elektriksel sistemler modifiye
edilmemelidir. Robotta kullanılan Motor,servo ve elektrik
solenoidler hiçbir şekilde modifiye edilmemelidir. İstisnalar
şöyledir:
A:montaj dirsewkleri ve çıkış şaftları/arayüzleri motorla fiziksel
bağlantıyı kolaylaştırmak için modifiye edilmesi.
B:elektriksel giriş uçları gerekli uzunluğa kesilebilir, ve fazladan
bağlantyı verye bölünmeler eklenebilir.
C:pencere motorlarındaki kilit pinleri çıkarılabilir
D:kapı,pencere,koltuk ve silicek vede fırçalı motorların bağlantı
kutuları çıkarılabilir.
E:servolar yapımcının dediği gibi modifiye edilebilir (örn,
sonsuza dek dönmesi için programlanması)
GÜÇ DAĞITIMI
K31: robotun tek yasal elektriksel enerji kaynağı robotun aküsü
olmalıdır
Akü akmayan SLA aküsü olnalıdır ve şuı özelliklere sahip
olmalıdır.
A: nominal voltaj: 12V
B:20 saatlik deşarjda nominal kapasite:minimum 17Ah
maximum 18.2Ah
C:şekil, dikdörtgensel
D:nominal boyutlar:18 cm x 7.6 cm x 16.7 cm olmalıdır. (+/2.54 cm her boyut için)
E:nomnail ağırlık 4.98 ile 6.57 kg arasında olmalıdır.
F: terminaller somun ve cıvata stilinde olmalıdır.
Ek olarak 1. El bilgisayarlar,kameralr veya benzeri cihazların
bataryalarına izinn verilmektedir (gopro kamerlaarı, laptop
bataryaları vsvs.) ama sadece o cihaza enerji veriyorlar ise ve
tüm usb ve benzeri bağlantıları robota sabitlewnmiş ise.
K32:güç verselerde vermeselerde kural 31de izin verilenler
dışında herhangi akü veya batarya kullanılamaz.
K33:robot hangi yöne dönerse dönsün akü düşmemelidir. (ters
dönmesi dahil) ve güvenli halde olmalıdır.
K34:robotun üzerindeki akü,elektriksel terminaller ve
bağlantılar,ve herhangi bir tele bağlanan herşey insulasyonlu
olmalıdır (elektrik geçirmemelidir)
K35:robotta kullanılan elektriksel güçlü olmayan enerji
kaynaklar altta verilen kaynaklardan gelebilir
A: pneumatik sistemlerdeki sıkıştırılmış hava (kural 79 ve 90 e
uyarak)
B:robotun ağırıl merkezindeki bir değişim
C:Kapalı göngüdeki gaz şokları ve
D:Hava ile doludurlmuş (pneumatik) tekerlekler.
APP bağlayıcıları, 120 amperlik şalterlr, güç dağıtım boardu
12VDC robot aküsü ve app konektörleri minimum 6AWG tel ile
bağlanmalıdır.
K37:Kural 42 ve 44 te belirtilen devreler hariç tüm devreler
sadece bir çift 12VDS WAGO konnektörlerine bağlı olmalı ve
güç almalıdır,M6 kapak vidaları kullanılamaz.
K38:tüm tel,kablo ve elektrişksel cihazlar (kontol sistem
pasrçaları dahil) robot şasisinden elektriksel olarak izole
olmalıdır. Robot şasisi hiçbir şekilde hiçbir elektriksel akım
taşımak için kullanılmamalıdır.
K39:120 amperlik şalter robotun dışından kolaylıkla ulaşılabilir
olmalıdır ve bu robotun üzerinde olmasına izin verilen tek 120
amperlik şalterdir. (şalterin yerinin robotun üzerinde bir şekilde
belirtilmesi önerilir.
K40:güç dağıtım paneli ve tüm şalterler inceleme için koalyca
görülebilir olmalıdır
K41:aktüatör olmayan tüm elektriksel parçalar veya çekirdek
kontol sistemleri özel yapım devre sayılmnaktadır, özel yapım
devreler 24 voltu geçecek enerji üretmemelidir.
K42:Roborio güç girişi güç dağıtım paneli üzerinde adanmış
olan güç kaynağı nterminallerine bağlı olmalıdır. Bu terminallere
başka hiçbir yük bağlanmamalıdır.
K43: kablosuz güç köprüleri direk tolarak 12V 2A değrlereine
sahip cross the roead elektronik voltaj regülatöründen güç
almalıdır. Ve o termianllere bağlanan tek yük olmalıdır.
K44:kablosuz güç köprüsüne güç sağlayan voltaj regülasyon
modülü güç dağıtım panelin sonundaki terminallere bağlı
olmalı, ve panelin yanlarındaki WAGO konnektörlerine bağlı
olmamalıdır. (Single cross road electornics penumatik kontrol
modülleri istisnadır.) ve o terminallerde başka yük olmamalıdır.
K45:GDP (güç dağıtım paneli) deki her WAGO konnektörlerine
sadece 1 tel bağlanmalıdır.
K46:GDP’de kullanılmasına izin verilen tek şalterler :
A:Snap Action VB3-A Series, terminal style F57
B:Snap Action MX5-A40
K47:GDP içinde kullanılan sigortalar sadece işlevsel olarak aynı
sigortalar ile değiştirilmelidir.
K48:Her dal devre sadece GDP de bulunan bir şaltere bağlı
olmalıdır.o devrelere bağlı olan şalterlere başka elektriksel yük
bağlanmamlıdır.
K49:Tüm devreler doğeu boyutlardaki izole teller ile bağlı
olmalıdır.
Aygıt yöneticisi tarafından önerilen veya orijinal olatrak aygıta
bağlı olan teller kendinden standart sayılır ve 49. Kuraldan
muaftır.
K50:Dal devreler COTS bağlantılarını , birleştirilmiş kabloları
COTS esnek,yuvarlanan,kayan temaslarını,COTS temas
bileziklerini içerebilir eğer tüm elektriksel yol düzgün ölçülenmiş
ve sınıflandırılmış elementlerden oluşturuluyor ise.
K51:Sabit polariteye sahip tüm sinyal seviyesi olmayan
teller(röle modül çıkışları,motor kontrolleri ve sensörler
hariç)tüm boyları boyunca üretici tarafınca rengi kodlanmış
olmalıdır.
A:Kırmızı,sarı,beyaz,kahverengi,veya çizgili siyah Konektörlerin
pozitif tarafta (örnek:+24VDC,+12VDC,+5VDC,ve benzeri)
B:Siyah veya mavi Konektörlerin genel veya negatif taraftında
olmalıdır. (-)
Yasal aygıtlara kendiliğinden bağlı olan kablolar K51’den
muaftır.
K52:Servo,fan ve harddrive motorları dışında tüm aktüatörler
güç regülatörlerine bağlı olmak zorundadır.
Robotun üstünde sadece aşağıda listelenen güç regülatörleri
kullanılabilir:
A. Motor Kontrolörü
i. Jaguar Motor Controller (P/N: MDL-BDC, MDL-BDC24, and 2173367)
ii. SD540 Motor Controller (P/N: SD540x1, SD540x2, SD540x4)
iii. Spark Motor Controller (P/N: REV-11-1200)
iv. Talon Motor Controller (P/N: CTRE_Talon, CTRE_Talon_SR,
and am-2195)
v. Talon SRX Motor Controller (P/N: 217-8080), equipped with
firmware version 0.28 or
newer if using via PWM. See R59 if using via CAN.
vi. Victor 884 Motor Controller (P/N: VICTOR-884-12/12)
vii. Victor 888 Motor Controller (P/N: 217-2769)
viii. Victor SP Motor Controller (P/N: 217-9090)
B. Röle Modülleri
i. Spike H-Bridge Relay (P/N: 217-0220 and SPIKE-RELAY-H)
C. Hava basınçlı (pneumatic) kontrolör
i.
Pneumatics Control Module (P/N: am-2858, 217-4243)
K53:Her güç regülatörü aşağıdaki tabloda verilen elektriksel yükü
kontrol etmelidir.(Zıttı söylenmediği sürece)
Her güç regülatörü sadece bir adet elektriksel yükü kontrol etmelidir.
** birden fazla düşük yük kullanan pneumatic solenoid valfler
, elektrik solenoidler veya özel yapım devreler bir röle
modülüne bağlanabilir.Bu sayede bir relay modülü aynı anda
birden fazla pneumatic aksiyonu veya özel yapım devreyi
çalıştırabilir.Başka hiçbir elektrik yükü başka hiçbir röle
modülüne bu şekilde bağlanamaz
K54:Servolar roboRIO daki PWM portlarına ya direk olarak
veya WCP spartan sensör panellerindeki PWM portları
üzerinden bağlanmak zorundadır.MXP,motor kontrolleri veya
röle modüllerine bağlanamazdır.
K55:Özel yapım devreler robot bataryası,GDP,motor
kontrolleri röleler.motorlar ve aktüatörler , pneumatic selonoid
valfler veya robot kontrol sisteminin diğer elementlerinin
arasındaki güç yollarını direkt olarak etkilememelidir.
Robotun elektriksel sistemine bağlanan yüksek alternatif
akım direnci voltaj izleme özel yapım devreleri veya düşük
alternatif akım ,akım devrelerine izin verilmektedir.Robotun
dışarı çıkardığı akım üzerindeki etkisi önemsiz olduğu sürece
Motor veya PWM uçlarına sinyal gürültü filtresi koyulabilir.
Bu tip filtreler özel yapım filtreler sayılmamaktadır ve 55 ve
73. Kuralların sınırlamalarından muaftır.
Kabul edilebilir sinyal filtreleri tamamen izole olmalı ve
aşağıdakilerden biri olmalıdır.
A. Tek mikrofarad veya daha az, polarize olmamış ,kapasitör
robottaki herhangi bir motorun güç bağlantılarına
uygulanabilir.(Motor bağlantılarına mümkün olduğunca
yakın koyulmalıdır.)
B. Bir rezistör PWM servoya bağlı olan kontrol sinyali üzerine
şönt yük olarak bağlanabilir.
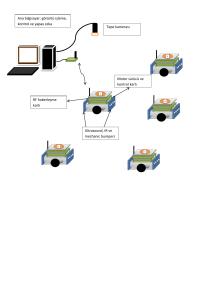
Kontrol, komut ve sinyal sistemi
K56:Robotlar FRC_2016_v19 and firmware v3.0.0. yazılımını
kullanan bir adet roboRIO (P/N:am3000) tarafından kontrol
edilmelidir.[Komutlar roboRIO dan çıktığı ve kontrol edildiği sürece
ikincil işlemciler kullanılabilir.]
K57:Doğru bir şekilde şifrelenmiş ve şifre anahtarı kullanan Bir adet
OpenMesh Kablosuz köprü (P/N: OM5P-AN) robota ve robot ile
iletişim kurmanın maç içindeki tek yoludur.
K58:Kablosuz köprü roboRIO internet portuna direkt veya CAT5
kablosu ile bağlanmalıdır.
K59:Ethernet bağlantısı olan diğer birinci el parçalar veya özel
devreler kablosuz köprüde bulunan diğer boş Ethernet portlarına
bağlanabilir.Ama 1100-1200 portlarını kullanarak udp paketi
gönderemez veya alamazlar (1130 ve 1140 portları bu kuraldan
muaftır)
K60:Operatör konsolu ve robot arasındaki bağlantı aşşağıdakiler ile
sınırlandırılmıştır:
A. Ağ Portları:
i. TCP 1180: roboRIO dan sürücü istasyonuna kamera verisi (DS)
kamera roboRIO’ya usb üzerinden bağlı iken, çift yönlü.
ii. TCP 1735: Akıllı Gösterge Paneli, çift yönlü
iii. UDP 1130: Gösterge Panelinden robot’a kontrol datası-toROBOT , çok yönlü
iv. UDP 1140: Robottan gösterge paneline giden durum datası- çok
yönlü
v. HTTP 80: Robota switch üzerinden bağlı olan kamera, çift-yönlü
vi. HTTP 443: Robota switch üzerinden bağlı olan kamera, çiftyönlü, çift yönlü
vii. UDP/TCP 554: Eş zamanlı h.264 eş zamanlı yayın
protokolü,kamera yayını, çiftyönlü
viii. UDP/TCP 5800-5810: Takım Kullanımı, çift yönlü
Takımlar portları istediği gibi kullanabilirler.(Örnek olarak TCP1180
robot ve DS arasında veri paylaşımı için kullanılabilir eğer takım
usbde kamera kullanmıyor ise)
Ama bu sınırlamalara uymak zorundalardır
B.Bant genişliği saniyede 7 megabitten daha fazla olmamalıdır
K61:roboRIO sürücü istasyon yazılımı ve kablosuz köprü doğru
takım numarasına karşılık vericek şekilde olmalıdır.
K62:Tüm sinyaller operatör konsolundan çıkmalı ve robota Arena
Ethernet ağı üzerinden iletilmelidir.
K63:K57 ve K62 dışında hiçbir kablosuz bağlantı robot arasında
veya içinde iletişim kurmak için kullanılmamalıdır.(örn. Eski
yarışmalarda kullanılan radyo modemleri veya aktif bluetooth
aygıtları yarışma süresince robotta kullanılamaz.)
K64:Kablosuz köprü robotun üzerine gösterge ışıkları Arena
personeli tarafından görülebilecek şekilde monte edilmelidir.
(Takımların kablosuz köprüyü sinyal gürültüsü üreten parçalardan
uzağa monte etmesi önerilir.)
K65:Robotta en az bir en fazla iki durum robot sinyal ışıkları
kullanılabilir(P/N: 855PB-B12ME522).
RSL= Robot sinyal ışıkları
Tüm sinyal ışıkları:
A:Robottan 91 cm uzakta önüne bakarken kolayca görünebilir
olmalıdır.
B:roboRIO’nun RSL kaynak terminallerine bağlanmalıdır.
C:Işığın üzerindeki ”La” ve “Lb” terminallerinin arasına jumper
koyup katı ışık operasyonu yapmalıdır.
K66:Sürücü istasyon yazılımı, roboRIO,GDP,Pneumatic Kontrol
Modülleri,voltaj regülatör modülleri,RSL’ler,120 amperlik
şalterler,motor kontrolörleri,röle modülleri,kablosuz köprü ve
bataryalar herhangi bir şekilde modifiye edilmemeli,üstünde
oynama yapılmamalı veya ayarlanmamalıdır.(oynama
yapmak:delmek,kesmek,makinelemek,tekrar kablolama,sökme
vb. içerir)
Aşağıdakiler bu kuraldan muaftır:
A:roboRIO üzerinde kullanıcı tarafından programlanabilir kodlar
modifiye edilebilir.
B:Motor kontrolörleri klavuzlarındaki gibi kalibre edilebilir.
C:Fanlar motor kontrolörlerine takılabilir.Ve güç giriş
terminallerine bağlanabilir.
D:Eğer kompresöre güç sağlıyor ise Spike H-Köprü Rölesi
20Amperlik tak çıkar şalterler ile değiştirilebilir.
E:Teller,kablolar ve sinyal yolları aygıt üzerindeki standart
bağlantı noktalarına bağlanabilirler.
F:Sabitleyiciler (Yapıştırıcılar dahil)cihazı operatör konsolü veya
robota bağlamak için veya kabloları cihaza sabitlemek için
kullanılabilir.
G:Isı iletimini iyileştirmek için termal arayüz kullanılabilir.
H:Aygıtın amacını,bağlantı türünü,fonksiyonel özellikleri vb.
belirtmek için etiketler kullanılabilir.
I:Jumperlar varsayılan yerlerinden değiştirilebilir
J:Jaguar motor kontrolöründeki limit switch jumperları çıkarılabilir
ve özel yapım bir limit switch devresi konulabilir.
K:aygıt yazılımı üreticinin sunduğu yazılım ile güncellenebilir.
L:Victor SP veya Talon SRX in integral kabloları
kesilebilir,soyulabilir ve/veya tellere bağlantılar eklenebilir.
M:Aygıtlar performansları aynı kaldığı sürece tamir edilebilir.
N:Talon SRZ data portunun kapağı çıkarılabilir.
K67:12VDC güç veya röle modülü veya motor kontrolörü çıkışları
roboRıo ya direkt olarak bağlanmamalıdır. (önceden belirtilmiş
12VDC girişi istisnadır)
K68:Tüm röle modülleri,servolar,PWM motor kontrolörleri
robori,odaki karşılıklı portlara bağlanmalıdır (röleler röle portuna,
PWM ler PWM portuna vsvs) b(ya direkt olarak yada WCP Spartan
Sensör Panelinden) veya yasal MXP bağlantıları ile
bağlanmalıdır.Başka hiç bit kaynapın sinyalleri ile kontrol
edilmemelidirler.
K69:Eğer bir motor MXP ile kontrol ediliyor ise, onun güç regülasyon
aygıtı aşağıdaki metodlardan biri kullanılarak bağlanmalıdır.
A:PWM pinlerine direkt olarak
B:PWM pinlerini uzatmak için kulanılan PASİF İLETKENLER ağı ile
veya
C:bir onaylanmış AKTİF AYGIT ile:
i. Kauai Labs navX MXP
ii. RCAL MXP Daughterboard
iii. REV Robotics RIOduino
iv. REV Robotics Digit paneli
v. WCP Spartan Sensor paneli
PASİF İLETKEN sadece ona uygulanan akımı iletmek amacı ile
kullanılan aygıtlara denir.
AKTİF CİHAZ dinamik olarak bir elektriksel enerji kaynağını kontrol
eden veya/ve bir elektriksel enerji kaynağını dışardan bir uyarma ile
çeviren cihaza denir.
Bir “pasif iletken ağı” sadece PWM de kullanılan servo ve motor
çıkış pinleri için geçerlidir, yani bir MXP pinine sensör bağlamak
diğer mxp pinlerini K69-B halinde kullanmasını engellemez.
K70:her bir Jaguar veya Talon SRX RoboRİO dan üretilen sinyal
inputları ve ya bir PWM veya CAN-veri yolu içerinden geçen(veya
birden fazla CAN-veriyolu aygıtından oluşan bir bağ ile) bir sinyal
tarafından kontrol edilmelidir. Ama ikisi aynı anda aynı cihaza
bağlanmamalıdır. Eğer CAN- veri yolu konfigürasyonu kullanılmış
ise, cihazoj yazılımı en az aşağıdaki versiyonlara güncellenmiş
olmalıdır:
A. Grey Jaguars – v109
B. Black Jaguars – v109
C. Talon SRX – v1.01. (10.0 dan yüksek olmamalıdır.)
K71:Her bir PCM roboRIO dan kaynaklanan bir sinyal ile kontrol
edilmeli ve roboRIO dan gelen bir CAN-veri yolu bağlantısı ile (veya
birden fazla CAN-veriyolu aygıtından oluşan bir bağ ile) kontrol
edilmelidir ve her bir PCM en az 1.62 versiyonuna yükseltilmiş
olmalıdır.
K72:ODO CAB arayüzü roboRIO da bulunan bir CAN-veriyoluna
bağlı olmalıdır. (veya birden fazla CAN-veriyolu aygıtından oluşan
bir bağ ile) ve PDP yazılımı en az 1.37. versiyona güncellenmiş
olmalıdır.
K73:CAN-veriyolu roboRIO CAN portuna bağlanmış olmalıdır.
A:ek switchler,sensör modülleri,özel yapım devreler,3. Parti
modülleri ve benzeri de CAN-arayüzüne eklenebilir.
B:roboRIO ve Jaguarlar,PDP,PCMler,ve/veya Talon-SRX ler
arasındaki bağlantıya etki eden veya bağlantıları karıştıran hiçbir
cihaza izin verilmemektedir.
4.11 PNEUMATİK SİSTEM
K74:güvenlilik,inceleme,tutarlılık ve yapımcı yenilikçiliği
karşılamak için 4.11 pneumatik sistem dışında belirtilen hiçbir
pneumatik parçaya robot üzerinde izin verilmemektedir.
K75:tüm pneumatik aygıtlar 1. El ve üreticileri tarafından en az
120psi ye kadar test edilmiş çalışma basıncıda olan parçalar
olmalıdır (K77-D istisnadır)
K76:tüm pneumatik bileşenler üretilme nedenleri olan orijinal
değiştirimemiş durumlarında kullanılmalıdır istisnalar aşağıda
belirtilmektedir:
A:boru sistemleri kesilebilir
B:pneumatik sistemlerin telleri kontrol sisteminin arayüzüne
göre modifiyer edilebilir
C:pneumatik bileşenlerin kendisinde olan montaj
noktaları,rayları ve benzeriyerlere göre birleştirilmesi
D:pneumatik silindirden herhangi bir montaj pilinin çıkarılması,
montaj silindirinin kendisi modifiye edilmediği sürece.
E:amaç,bağlantı türü,fonksiyonel performans vb şeyleri belirtme
amaçlı etiketlemeler.
R77:2016 FIRST Robotics Compeition robotları üzerinde
kullanımına izin verilen pneumatik parçalar aşağıdakilerdir.
A:Kit of Parts ta bulunan parçalar (R77-K dendiği gibi haricinde)
B:KOP dekilere eşit fonksiyonlara sahip pneumatik basınç
havalandırma tıkaç falfleri (parker PC609-2 ve MV709-2 önerilir)
C:maksimum 3.8 NPT,BSPP veya BSPT port çapına sahip
solenoid valfler
D:maksimum çalışma basınçları 120psi den düşük olan
solenoid valflere izin verilmektedir, fakat eğer kullanılır ise ek bir
basınç rahatlatma valfi ana regülatör tarafında düşük basıncı
korumak için koyulmalıdır. Basınç rahatlatma valfi solenoid
valfin maksimum çalışma basıncından daha düşük bir basınç
değerine ayarlanmış olmalıdır.
E:ek pneumatik borular maksimum 4.87 cm iç çapa sahip
oldulkarı sürece ve KOP parçalarına eşit fonksişyonlara sahip
olduğu sürece kulanılabilir
F:basınç dönüştürücüleri,basınç ölçerler,pasif akış kontrol
valfleri (özellikle “iğne valf”),dağıtım borusuve bağlantı
uydurucular.
G:emniyet valfleri (K89 daki gereksinimlere uyduğu sürece)
H:akıntı yönündeki basıncı rahatlatmak amacı ile kulanılan ve
kapandığında atmosfer basıncına dengeleyen kapatma valfi (3
yönlü valf veya 3 yönlü egzos valf olarakta bilinir)
I:maksimum 60 psi çıkış basıncına sahip basınç regülatörleri
J:pneumatik silindirler, pneumatik doğrusal ve dögüsel
aktüatörler
K:pneumatik depolama tankları (whiteclipboard tankları
P/N:AVT-PP-41 hariç) ve
L:K79 a uyan kompresörler.
K78:eğer pneumatik bileşenler kullanılmış iasw, aşağıdaki
itemler pneumatik devrenin bir parçası olarak gereklidir ve bu
bölümegöre kullanılmak zorundadır.
A:kompresör
B:doğru şekilde sabitlenmiş/monte edilmiş basınç rahatlatma
valfleri. (nylon,pirinç,vsvs)
C:nason basınç switch’i P/N SM-2B-115R/443
D:en az bir basınç havalandırma tıkacı
E:”depolanmış” basınç ölçer (birincil regülatörden gelen akıntıya
karşı)
F:”çalışan” basonç ölçer (birincil rgulatörden gelen akıntıya
doğru)
G:”çalışan” basınç regülatörü
K79: robottaki basınçlı hava bir ve sadece bir tek kompresör
tarafından sağlanmalıdır, kompresör spesifikasyonları nominal
12VDC de 1.10 cfm akış oranını aşmamalıdır.
K80:kompresör panonun dışında olabilir, ama yinede robot
tarafından kontrol edilmek zorundadır. (kompresör robotada
monte edilebilir, veya hava depolama tanklarında önceden
sıkıştırılmış basınçlı havayı da kullanabilir.)
(bu kuralın amacı takmların kompresörün dışarıda olmasından
kaynaklanan ağpırlık avantajının kullanılabilmesine izin
verilebilmesidir.)
K81:robotta bulunan ”depolanmış” hava basıncı 120 psi dan
yüksek olmamalıdır. Robot üzerinde kullanılan hiçbir basınçlı
hava kaynağı robottan başka bir yerde depolanamaz.
K82:robotta bulunan “çalışan” hava basıncı 60 psi dan yüksek
olamaz ve tek bir birincil ayarlanabilir, tahliye edilebilir basınç
regülatörü tarafından sağlanmalıdır.
K83:sadece kompresör,tahliye/rahatlama valfi (P/N: 16-004011),basınç switch’i, basınç ölçer,depolama
tankları,tüpler,basınç dönüştürücüler ve bağlantı sabitleyiciler
akıntı tersi regülatöre giden pneumatik devrede bulunabilir.
K84:Basınç ölçerler regülatörün akışına doğru ve akışına karşı kolay
görülebilecek yerlere “depolanmış” ve “çalışan” basınçları
göstermesi için koyulmalıdır.
K85:Eğer kompresör robotun üzerinde değil ise basınç ölçerler de
robot dışına koyulabilir eğer diğer kurallara uyuluyor ise.
K86:Eğer depolanmış basınç ölçer kompresör ile beraber robotun
dışında ise sadece “çalışan” (60 psi veya daha az) hava robotun
üzerinde depolanabilir.”Çalışan” basınç ölçer her zaman robotun
üzerinde olmalıdır.
K87:Tahliye valfi direkt kompresör üzerine bağlanmalı veya sert
sabitleyiciler ile sabitlenmiş olmalıdır.(pirinç,naylon vb.) Ve çıkış
portunda olmalıdır
[Eğer robot dışında kompresör kullanılıyor ise robotun üzerinde ek
bir tahliye valfi bulunmalıdır.]
K88:Basınç switch gereksinimleri:
A: Nason P/N: SM-2B-115R/443 olmalıdır.
B:Pneumatic devrenin yüksek basınç tarafına
bağlanmalıdır.(“depolanmış”basıncı algılaması için)
C:Basınç switchinden çıkan iki tel de direkt olarak kompresörü
kontrol eden PCM’nin basınç switch input’una bağlanmalıdır.Veya
roboRIO ve Spike Rölesi ile kontrol ediliyor ise,roboRIO’ya
D:Eğer roboRIO’ya bağlı ise, roboRIO switchin durumunu
algılayacak bir şekilde programlanmalı.Sistemin aşırı basınç
almasını engellemek için kontrol etmelidir.
K89:Her bir basınç tahliye tıkacı:
A:Pneumatic devreye öyle bir şekilde bağlanmalı ki,manuel olarak
kontrol edildiğinde tüm basıncı makul bir hızda atmosfere
boşaltabilmelidir.Ve,
B:Robotun üzerinde kolay görülebilir ve ulaşılabilir bir yerde
olmalıdır.
Eğer kompresör robotun üzerinde değil ise,ek bir basınç tahliye
tıkacı robotun dışındaki pneumatic devrenin yüksek basınç
bölümüne kompresör ile beraber bağlanmalı.
K90:Birden fazla valfin çıkışları beraber pompalanmalıdır.
4.12 OPERATÖR KONSOLU
K91:National Instruments websitesinde sağlanan sürücü istasyon
yazılımı,robota giden operasyon
modu(OTOMATİK/TELEKONTROL) operasyon durumunu
(AKTİF/DEAKTİF) ileten tek uygulama olmalıdır.Yazılım 16.0.1 yada
daha yüksek olmalıdır.
K92:Sürücü tarafından veya insan kullanıcı tarafından robota komut
aktarmak için kullanılan operatör konsolu,bileşen setleri ve
mekanizmaları kullanıcıya grafiksel bir görüntü olarak tanısal veriyi
aktarmalıdır.Operatör konsolunda bulunmalıdır ki ekran inceleme ve
maç sırasında kolayca görünebilmelidir.
K93:Sürücü istasyon yazılımını içeren aygıtlar sadece alan yönetim
sistemine kullanıcı istasyonunca sağlanan Ethernet kablosu ile
etkileşime geçmelidir.Takımlar ALAN Ethernet kablolarını sürücü
istasyonu aygıtlarına direkt olarak Ethernet kablosu veya tek port
Ethernet dönüştürücüsü(dock istasyonu,usb Ethernet
dönüştürücüsü,thunderbolt Ethernet dönüştürücüsü vb.)
bağlanmalıdır.Operatör konsolundaki Ethernet portu kolayca ve
hızlıca ulaşılabilir olmalıdır.
K94:Operatör konsolu maksimum 152 cm uzunluğunda ve 35
santim derinliğinde olabilir.(Sürücüler tarafından maç süresince
tutulan veya giyilen herhangi bir item istisnadır.)
K95:ARENA tarafından sağlanan sistemler dışında hiçbir kablosuz
iletişim formu operatör konsoluna veya operatör konsolu içerisine
veya operatör konsoluna doğru iletişim için kullanılamaz.