BİLGİSAYARLI
TOMOGRAFİNİN
BÖLÜMLERİ
BİLGİSAYAR ÜNİTESİ
BİLGİSAYAR ÜNİTESİ
1.
2.
3.
CPU >> Central Processing Unit >> Merkezi İşlem
Ünitesi
Dedektörlerden elde edilen sinyaller bir çok
matematiksel işlemden sonra sayısal veriye
dönüştürüldükten sonra CPU tarafından değerlendirilir
CPU içindeki üniteler
Kontrol
Aritmetik işlem
Hafıza
Kontrol ünitesinde toplanan veriler aritmetik işlemler
için aritmetik işlem ünitesine gönderilir
BİLGİSAYAR ÜNİTESİ
a)
b)
c)
1.
2.
Aritmetik işlem ünitesinde verilerin sıralı
matematiksel hesaplama düzeneği ile
değerlendirilmesi >> “algoritm”
3 tip algoritm kullanılır
Back Projection (Geri yansıma)
Varsayıcı metotlar
Analitik metotlar
İki boyutlu Fourier Analizi
Filtered back projection
Çok kısa zamanda bir kesit alanı için 30000
denklemin çözülmesi gerekir
BİLGİSAYAR ÜNİTESİ
Aritmetik işlemler sonucu elde edilen veriler tarama
alanını temsil eden sayılardan oluşmuş bir haritaya
dönüştürülür >> rekonstrüksiyon
Rekonstrüksiyon zamanı >> Taramanın bitişi ile
ekranda görüntü oluşana kadar geçen zaman
Oluşturulan görüntü haritası cihaza göre farklıdır
>>Örneğin 256x256
Bu sayısal değer haritada bu sayı kadar çizgi ve her
çizgide de bu sayı kadar değer olduğunu gösterir
Her sayısal değer incelenen kesitteki noktasal bir odağı
temsil eder ve o odağın iki boyutlu görüntüsünü
oluşturur >>pixel
Her bir odağın bir de hacmi vardır>>Voxel
BİLGİSAYAR ÜNİTESİ
Dedektörlerden alınan sinyaller
Kontrol ünitesi
CPU
BT Algoritmi
Aritmetik İşlem Ünitesi
Rekonstrüksiyon
Hafıza Ünitesi
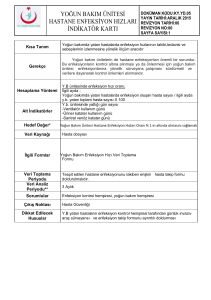
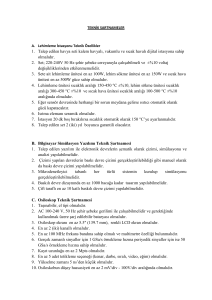
Filtered Back
Projection
Filtered back projection is the most commonly used algorithm for
straight ray tomography.
The result of back projecting
(a)The ideal Situation
(b) Fourier Slice
Theorem
(c) The filter back
projection takes the
Fourier Slice and applies
a weighting so that it
becomes an
approximation of that in
(a).
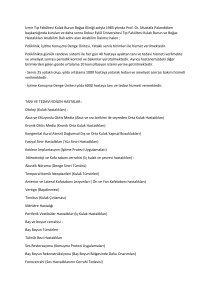
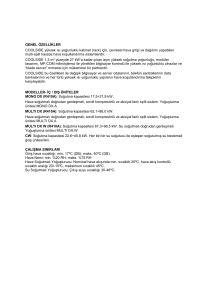
The Array: Algebraic
Reconstruction
Technique (ART)
Σx
Σx
ART is used in
indeterminate problems and
was first used by Gordon et
al in the reconstruction of
biological material.
Σy
1
3
2
6
?
?
?
6
1
1
3
5
?
?
?
5
2
1
2
5
?
?
?
5
4
5
7
4
5
7
Σy
Figure a. Initial 3 by 3 grid
with ray sums and coefficients.
Σx
Σy
Figure b. The indeterminate
problem.
Σx
Σx
6/3
6/3
6/3
6
6/3
6/3
6/3
6
1.5
1.8
8
2.6
3
6.0
1
5/3
5/3
5/3
5
5/3
5/3
5/3
5
1.2
5
1.5
7
2.1
9
5.0
1
5/3
5/3
5/3
5
5/3
5/3
5/3
5
1.2
5
1.5
7
2.1
9
5.0
1
4
5
7
5.3
3
5.3
3
5.3
3
4
5.0
2
7.0
1
Figure c. Step 1: All entries in
unity, scaled by ray sum over
number of row elements.
Σy
Figure d. Step 2: Recalculated
column sums.
Σy
Figure e. Step 3. Recalculated
row and column sums and
elements.
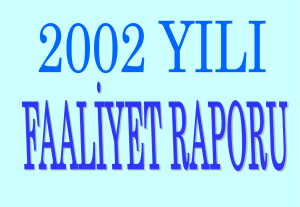
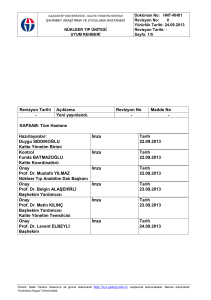
Basic principle of CT
-Reconstruction of 2 dimensional image-
Projection Data curvilinear integral of absorption coefficient regarding Y
y
y
object
x
x
X-ray
tube
Data Acquisition field
Reconstruction field
Simple Backprojection
Blur
Basic principle of CT
-Reconstruction of 2 dimensional image-
Projection Data
y
x
*
Filtered Projection data
Reconstruction Filter
x
x
ω
or
x
Multidirectional
Backprojection
Filtered Backprojection
GÖRÜNTÜLEME ÜNİTESİ
Görüntülerin film üzerine geçirildiği bölümdür
Multiformat ve ya laser kamerayı da içerir
Bilgisayar ünitesindeki sayısal harita görüntüye
dönüştürülür
Bilgisayar ünitesinde işlene ve sonra
rekonstrüksiyonla sayısal verilere dönüştürülen
sinyallerin “gri skalası” içinde tonlanmasını
yapar
Siyahtan beyaza kadar değişen gri tonlamalı
noktaların birleşimi ile görüntü oluşur
GÖRÜNTÜLEME ÜNİTESİ
Nokta olarak adlandırılsa da aslında bunlar bir
alanı tanımlar (2 boyutlu)
Bu alanlara “piksel” denir
Piksel sayısını belirten ve piksel birleşimini
tanımlayan örgüye “matriks” (ağ) denir.
İlk BT’lerde 80x80 değerli matriksler
Günümüzde 256x256,320x320,512x512 ve
1024x1024 matriksli cihazlar
Matriks değeri arttıkça görüntü kalite ve detayı
artar
GÖRÜNTÜLEME ÜNİTESİ
Pikselin kesit kalınlığına bağlı hacmi de vardır
>>üç boyutlu görüntü >>voksel
Voksel= Piksel X Kesit kalınlığı
Vokselin içini dolduran objeler ayrı bir obje
olarak seçilemez >> “Parsiyel Volüm Etkisi”
Parsiyel volüm etkisi kesit kalınlığı ile ters
orantılı
Görüntüleme kesitleri inceldikçe esas görüntü
kalitesi piksel ile ifade edilebilir
GÖRÜNTÜLEME ÜNİTESİ
Piksel değeri suyun attenuasyon değeri
“sıfır” olarak kabul edilerek bir skalaya
dönüştürülmüştür
Her doku için elde edilen piksel değeri
suyun attenuasyon değeri ile
kıyaslanarak yeni bir sayı elde edilir ve
buna “BT numarası” denir
Attenuasyon arttıkça piksel parlaklaşır
Attenuasyon azaldıkça piksel koyulaşır
GÖRÜNTÜLEME ÜNİTESİ
BT numaraları -1000 ile +1000 arasında
hesaplanır ve Hounsfield Ünitesi olarak
birimlendirilir
Hounsfield Skalasına göre attenuasyon
arttıkça piksel daha beyaz olur
Kemik,kalsifikasyon,hematom,yumuşak
doku >> skalada +
Yağ ve hava >> skalada -
<>
GÖRÜNTÜLEME ÜNİTESİ
PENCERELEME (WINDOWING)
1.
2.
3.
1.
2.
İnsan gözünün algılayamayacağı,pek çok oluşumun seçimini
engelleyen durumu ortadan kaldırmak için görünmesi istenen
bölgelerin gri tonlarında,istenmeyen yerlerin ise siyah beyaz
tonlarında boyanmasıdır
Wimdow width >>seçilen aralığın alt ve üst sınırları arasındaki
bölüm
İmajda görünecek BT numarası aralığını belirler
Bu seviyenin üstündeki değerler >>beyaz
Bu seviyenin altındaki değerler >>siyah
Window level >> seçilen pencere genişliğinin ortası
Monitörde izlenen merkezin BT numarasını belirler
Hounsfield skalası üzerinde window genişliği merkezinde yer
alacak alanı gösterir
GÖRÜNTÜLEME ÜNİTESİ
HÜ >> -100 ile +150 arasındaki oluşumları daha iyi
görmek için WW:250 ve WL:125 olmalı
HÜ değerine göre gerekirse incelenecek dokuya göre
daha hassas ayar yapılmalı >> Örn: Toraks kesitinde
akciğer incelemesi için pencere içerisinde mediasten ve
toraks duvarı gri ölçeğin beyaz tonları içerisinde
kaybolur. WL arttıkça mediasten ve toraks duvarı
görülür hale gelir
Pencereleme seviyesinin artması HÜ daha yüksek
oluşumların (kemik gibi)görüntülenmesini
sağlarken,yumuşak doku farklılıklarını azaltır
Dar pencere >>küçük kontrast farklılıklarını açığa
çıkarır
Kontrst farkı az olan dokularda >> dar pencere
GÖRÜNTÜLEME ÜNİTESİ
Multiformat kamera >> Görüntüleri filme aktaran
sistem
Bilgisayar ekranı benzeri bir katot tüpü ve tüpün üç
düzlemde hareketini sağlayan mekanik bir sistemden
oluşur
Lazer Kamera >> Katot ışın tüpü yerine lazer ışınları
kullanılır
Multiformata göre daha iyi ve detaylı görüntü
GÖRÜNTÜLEME ÜNİTESİ
GÖRÜNTÜLEME ALANI (FOV)
İncelenen kesitteki görüntü alanı
İncelenen objenin boyutuna göre belirlenir
FOV değeri piksel sayısını değiştirmez, vokseli etkiler
FOV küçülürse >>voksel boyutu daha küçük >>
rezolüsyon artar
FOV’un küçültülmesi >>görüntü alanında izlenen
dokunun daha küçük olması >>görüntünün büyümesi
>> odaklama (zoom)
GÖRÜNTÜLEME ÜNİTESİ
1.
2.
1.
2.
3.
Rekonstrüktif Zoomlama >>
Büyük FOV değeri seçilen görüntü ve bilgisayar
hafızasında dedektörden gelen bilgilerin geldiği biçimde
durması gerekir
Görüntü üzerinde işaretlenerek belirlenen alanın
yeniden değerlendirilmesi ile yeni görüntü oluşturulur.
Kalite arttırılabilir
İnterpolatif Zoomlama >>
Hafızada görüntünün sayısal değerleri bulunduğunda
yapılabilir
Görüntü alanındaki işaretlenin bölgedeki tüm pikseller
genişletilir ve komşu aralıklar, komşu piksellerin
aritmetik ortalamasına eşit yeni piksellerle doldurulur
Görüntü büyütülebilir ama detay kalitesi değişmez